
Abstract
This work reports the development of highly sensitive Piezoresistive flexible strain sensor for human motion detection and speech recognition. Initially, a conductive polymer composite (CPC) solution comprising of thermoplastic polyurethane and Carbon Nanoparticles was prepared using Dimethylformamide as solvent and Chloroform as dispersant with the composition of 50% v/v. The solution was heated to a temperature of 60°C for evaporation of the solvent until it contained 13.5% w/v solvent for steady electrospinning. In this way, the CPC solution was used to develop Electrospun Nanofibrous Yarns (ENFYs) by applying a potential difference of 40 KV between the electrospinning needle and Aluminum collector. A cotton fabric was wrapped on the Aluminum collector to allow twisting of the deposited electrospun nanofibers. This novel collector configuration resulted in the formation of nanofibrous yarns due to the whirling action of the advancing jet of CPC solution. The cotton fabric on the collector facilitated twisting of fibers by allowing them to roll over the fabric. The fabricated ENFY sensors showed remarkable stretchability up to 102% strain while achieving a gauge factor of 70 at 100% strain. Long-term usage necessitates repeatability, which was demonstrated by cyclic loading at a crosshead speed of 40 mm/min for up to 1000 cycles using a custom-developed linear actuator, with no signs of fracture. ENFY strain sensor was attached to different parts of human body such as finger, fist, elbow, knee and ankle and was found capable of measuring and observing angle, position and frequency of motion. Owing to its ultrasensitive behavior, the developed sensor was able to measure heart rate as well. When the developed sensor was attached to Adam’s apple for speech recognition it showed remarkable response towards different utterances and breathing and gulping actions with clearly distinguishable signals. These results demonstrate that the developed novel ENFY flexible strain sensor can be employed for proprioceptive sensing and speech recognition for human-machine interaction, soft robotics and wearable devices etc.
Keywords
Introduction
Wearable devices are not only becoming smaller in size with the advancement in technology but are also becoming more efficient in operation. 1 At the same time, we now have a more significant data collection capability as we can gather a vast amount of sensor data about people’s everyday lives, thanks to the popularity of smartphones and various wearable devices such as smart wristbands and smart watches.2,3 Wearable electronics are a class of portable equipment that can be worn and inserted in clothes, implanted in the user’s body or even tattooed on the skin. 4 Because of their rapid adoption and easy integration, wearable devices are at the center of the Internet of Things. These innovations have allowed the development of various applications such as human motion and activity detection, physiological pressure alert with real-time response to the stimuli such as force and pressure.5,6 Owing to these advantages, various wearable/flexible electronic strain sensors with the ability to detect the physiological status of the human body such as muscle activity, pulse and breathing, have been explored in recent years. 7
Wearable sensors must be durable, biocompatible, lightweight, and extremely sensitive to meet the standards of non-invasive and quantitative measurement of body movement and temperature. Owing to low sensitivity of traditional metal foil strain sensors, researchers are working to exploit innovative materials and fabrication processes to develop flexible sensors for advanced applications such as soft robotics, human-machine interaction, and medical rehabilitation. 8 Flexible sensors have attracted researchers due to their ease of manufacturing, handling, pliability and sensitivity for integration in reliable human-machine interfaces with the capability to accurately monitor human activity. Such interfaces with integrated flexible sensing nodes can monitor physical movements and thus the physiological state of the human body by following the bending or stretching actions of various body parts. This strain measurement capability has motivated the researchers to develop sensitive wearable sensors for monitoring human motion, detection of certain emotions, monitoring heart rate and voice recognition etc.9,10
Conductive polymer composites (CPC) can be made by adding conductive fillers in the insulating matrix. Such systems are composite in nature and have also been referred to as Extrinsic Conductive Polymers in the literature. Being composite in nature, these Extrinsic Conductive Polymers can be synthesized with a wide range of mechanical and conductive properties. The factors which influence these properties in such Extrinsic Conductive Polymers include the concentration of the filler, its distribution, geometry, design of interface between the filler particles and the surrounding matrix as well as the electrical conductivity of the filler itself. As the concentration of the conductive filler is increased in the insulating matrix, the conductivity starts increasing progressively. For a certain optimum concentration, the conductivity increases exponentially. This concentration is termed as the percolation threshold. Beyond the percolation threshold, the conductivity does not show marked increment and nearly levels off. At the percolation threshold, the conductivity between the nanoparticles is governed by the conductive networks known as the Percolation Networks. The so called percolation networks comprise of conductive paths within the insulating matrix formed by the conductive fillers wherein the conductivity is dictated by either electron hopping between the closely spaced conductive fillers or via quantum physical phenomenon known as electron tunneling. At the nanoscale, the electrons can ‘tunnel’ through the two conductive particles even if their kinetic energy is less than the potential energy of the barrier between the two particles, a phenomenon known as ‘Quantum Tunneling’. At the percolation threshold, these mechanisms not only ensure enhanced conductivity of the polymer composite but also endow it with the sensitivity towards applied strain since any such deformation disturbs the percolation networks and thus effects the composite conductivity. Figure 1 gives the schematic illustration of the percolation networks in insulating matrices in extrinsic conductive polymers. Schematic illustration of percolation networks responsible for charge transport in extrinsic conductive polymers.
11
Flexible nanocomposite strain sensors are considered as an excellent candidate for developing the next generation of wearable electronic devices mainly because of the advantages of high specific surface area, softness, lightness, and ease of processing into complex structures.10,12 These sensors sense changes in electrical properties, including resistance or capacitance, due to mechanical deformation. Fabricating a Piezoresistive composite by combining conductive filler with stretchable rubber/polymer is a popular technique for achieving strain sensors with a wide strain detection range and sensitivity.13-18 The strain is detected by measuring the variation in resistance caused by the change in inter-filler distance when the composite is stretched.19-26 Various carbonaceous and non-carbonaceous fillers such as carbon nanotubes, graphene, carbon nanoparticles (CNPs) and metallic nanoparticles/nanowires can be used to induce conductivity in the polymeric matrix.11,27,28 Strain sensors using metal nanoparticles as fillers can also achieve high sensitivity. However, permanent deformation of the composite material at high strain leads to inter-particle gaps/cracks, consequently the devices can only work for a restricted strain range.29-31
Yin et al. 32 developed a Silver Nanowire (AgNW) based biodegradable nanopaper strain sensor in which sensitivity was increased by incorporating a unique micro-cracked structure which was maintained in pre-stretched state . The sensor was reported to be suitable for human motion/psychological detection as well as for temperature monitoring. Bu et al. 33 fabricated a Ti3C2Tx MXene paper based super hydrophobic sensor in which induced microcracked structure offered torsion deformation detection, self-cleaning and corrosion-resistant properties . Nauman et al. 23 reported a CNPs/polystyrene based piezoresistive strain sensor which was used for Structural Health Monitoring (SHM) of fiber-reinforced composite materials . Some of the researchers have hybridized nanofillers in Piezoresistive sensors for better properties. For instance, Zhu et al. 34 were able to develop a 3D structured CNT-rGO aerogels based strain sensor with better strength and electrical properties as compared to rGO based aerogels. Jan et al. 21 exfoliated graphene from graphite and dispersed it in Polyurethance for Piezoresistive sensing. The strips of sensors were employed for strain monitoring of GFRPs (Glass Fiber Reinforced Plastics) with relatively high sensitivity (Gauge factor ⁓ 3) as compared to traditional metal foil strain gauges. In a similar vein, Anas et al. 15 reported strain sensors made by dispersing Graphene Nanoplatelets (GNPs) in an insulating polymer matrix . The concentration of nanoplatelets was varied by weight in order to identify the most suitable nanoplatelet concentration for high sensitivity strain monitoring. The weight of concentration of 6% was reported to yield gauge factor of 4.6 which is more than twice that of the commercially available traditional metal foil strain gauges. A unique sensor comprising of electroplated porous copper on Polyamide filaments was reported more recently. 35 The porosity in the electroplated metal layer was reported to form percolation networks which were disturbed by tensile loading resulting in high gauge factors. This percolating network in porous metal layer achieved by maintaining a high current density during electroplating would pave way for novel metal foil strain gauges with high sensitivities.
Electrospinning is a versatile technique used to develop Nanofibers with a wide range of properties which can be varied by changing the manufacturing parameters, including polymer type, applied voltage, collector to needle distance, solution viscosity and flow rate etc.36,37 The diameters of electrospun fibers range from a few nanometers to certain microns. A typical electrospinning set-up includes syringe pump, high voltage power supply and metallic collector etc.29,38 Polymer solution is filled in the syringe pump that is programmed to provide continuous flow of a calibrated amount of the solution. A high voltage is applied between the syringe needle and the ground which acts as the collector.37,38 The high voltages help overcome surface tension of the solution and force it to move towards the collector for the continuous production of Nanofibers.39,40 Different configurations of collectors have been reported such as rotating cylinders and flat plates with the former being used for the deposition of continuous and aligned fibers whereas latter is meant to deposit a web of randomly oriented Nanofibers.12,41
Composite Nanofibers can be electrospun by simply adding filler materials to the polymer solution. These nanofibers are particularly suitable for human motion detection and speech recognition as they have high surface-to-volume ratio, aspect ratio and flexibility 42 as against metallic strain gauges which are not suitable for wearable electronics owing to their low sensitivity and rigidity.43,44 Piezoresistive behavior is associated with the change in resistance with strain. In order to achieve high degree of sensitivity, nanofibers possessing composite structure with nanofillers dispersed in polymeric matrix can be synthesized using electrospinning process. Various allotropic forms of carbon such as Carbon Nanotubes (CNTs), CNPs and Graphene are the dominant fillers in these applications due to their superior mechanical, thermal and electrical properties.
Despite the versatility of the electrospinning process, poor structural integrity of randomly deposited web of nanofibers has hampered their application potential. These issues have been addressed in part by using innovative collector configurations 45 and by employing various post processing strategies which help improve structural integrity of the web of nanofibers. 37 Yet another way of improving the mechanical properties of electrospun fibers is to form a yarn directly spun from nanofibers.46-48 Due to the twisted configuration, these spun yarns have higher strength than nanofiber bundles and it is speculated that optimized spinning of nanofibrous yarns will pave way for the weaving of nanofiber cloth in the future. 49
This work reports the development and characterization of novel Electrospun Nanofibrous Yarns (ENFYs) from CNPs dispersed in Thermoplastic Polyurethane (TPU) matrix. The twisting action necessary for spinning of yarns was achieved by adopting a novel collector configuration which comprised of a cotton fabric wrapped Aluminum collector plate. The whirling action inherent to the electrospinning process resulted in twisting the nanofibers, which were loosely adhered to the collector, with one another. The observed Piezoresistive behavior of these yarns was exploited for proprioceptive sensing and speech recognition by attaching the ENFY sensor to various body parts owing to high degree of flexibility and sensitivity of the developed sensors.
Experimental Procedure
Materials
Carbon nanoparticles (Printex L6) supplied by Orion Engineered Carbons, Germany were used as conductive filler whereas TPU pellets were obtained from Sigma Aldrich, United States. The solvent and dispersant N, N-Dimethyl Formamide (DMF, 99.5%) and Chloroform were procured from Duksan Pure Chemicals, South Korea and Kamal Laboratories, Pakistan respectively.
CPC solution
A hybrid solution of CNPs and TPU was used to develop a strain sensor. Thermoplastic polyurethane was first dissolved in DMF in a beaker with 10% w/v composition using magnetic stirring at 80oC to prepare the solution. Dimethylformamide and Chloroform (50% v/v) were used to disperse CNPs using ultra-sonication for 1 h. Thermoplastic polyurethane was added in solution followed by constant magnetic stirring to make CPC solution of TPU/CNPs in DMF/chloroform. The proportion of CNPs was 35% by weight of TPU.
Printex L6 CNPs have been extensively characterized in terms of their conductive properties and their percolation threshold. These results have been reported by Cochrane et al 50 . In the present work we have used the concentration of nanoparticles corresponding to the percolation threshold where the strain sensor manufactured by dispersing Printex L6 nanoparticles in a non-conductive matrix exhibits maximum sensitivity as reported by Cochrane et al 50 .
Total TPU/CNPs concentration was kept at 13.5% w/v of the solvent mixture DMF/Chloroform to ensure continuous production of Nanofibers. A schematic diagram depicting the complete route for the formation of CPC solution is given in Figure 2. Schematic diagram depicting dispersion process to form conductive polymer composite solution.
Fabrication of ENF based strain sensor
A custom-developed syringe-based electrospinning system was used to fabricate Nanofiber yarns having vertical configuration as shown in Figure 3. Conductive polymer composite solution was filled in a 10 mL syringe having 14.5 mm inner diameter which was placed in the holder of the syringe pump. A high voltage power supply (CX-600A, Anshan Lead Sun Electronics, China) was used to generate the electric field. The positive terminal of the power supply was attached to the syringe needle, while the negative terminal was connected to a grounded aluminum plate. After setting the syringe needle and collector in the aforementioned vertical configuration, a cotton fabric was placed over the aluminum collector and 40 KV voltage was applied to generate randomly oriented composite Nanofiber yarns. The whipping action inherent to the electrospinning process and the use of cotton fabric over the aluminum collector helped in obtaining the nanofiber yarns instead of a web of fibers. The modified collector configuration ensured that while the CPC solution travelled towards the collector, the inter play of the whipping action and non-adherence of the web on the cotton fabric allowed spinning of the electropsun fibers. The spinning action which resulted in twisting of fibers resulted in the formation of Nanofiber yarns. Afterwards the collected nanofiber yarns were kept for 1 week at room temperature to ensure evaporation of the residual solvent. The dried yarns were then employed for further characterization. Schematic of the developed electrospinning system.
Flexible piezo-resistive sensors were fabricated using a simple procedure. As-fabricated Nanofiber yarns were first removed from aluminum foil and cut in 25 mm long segments before sticking them to the flexible polycarbonate (PC) substrate. Sensor connections were made by employing copper tape in conjunction with the conductive silver paste for electromechanical characterization of the developed sensors. A schematic of the fabrication process is given in Figure 4. Fabrication process of flexible strain sensor.
Characterization
Field Emission Scanning Electron Microscopy (Fe-SEM) supplied by TESCAN was used to study the morphology of developed ENFYs. GNR Explorer X-ray diffractometer was employed to study the crystalline structure of nanofibers at 2θ from 5° to 60° using Ni-filtered Cu-K radiation. A slow scan speed of 2°/min was employed. Thermogravimetric Analysis (TGA) coupled with Differential Scanning Calorimetry (DSC) was used to study the thermal behavior of developed composite Nanofibers. A steady heating rate of 5°C/min was employed for the purpose. For the calculation of gauge factor and sensor repeatability under cyclic loading conditions, an in-house developed linear actuator was used as shown in Figure 5. For this purpose, the ENFY specimens having gauge length of xxx were attached to the fixed and moveable heads of the actuator using aluminum strips. The crosshead speed was kept at 20 mm/min. and 40 mm/min. during monotonic and cyclic loading respectively. The ENFY based sensors were subjected to cyclic loading for 1000 cycles at 30% of their maximum failure strain. In-house developed linear actuator.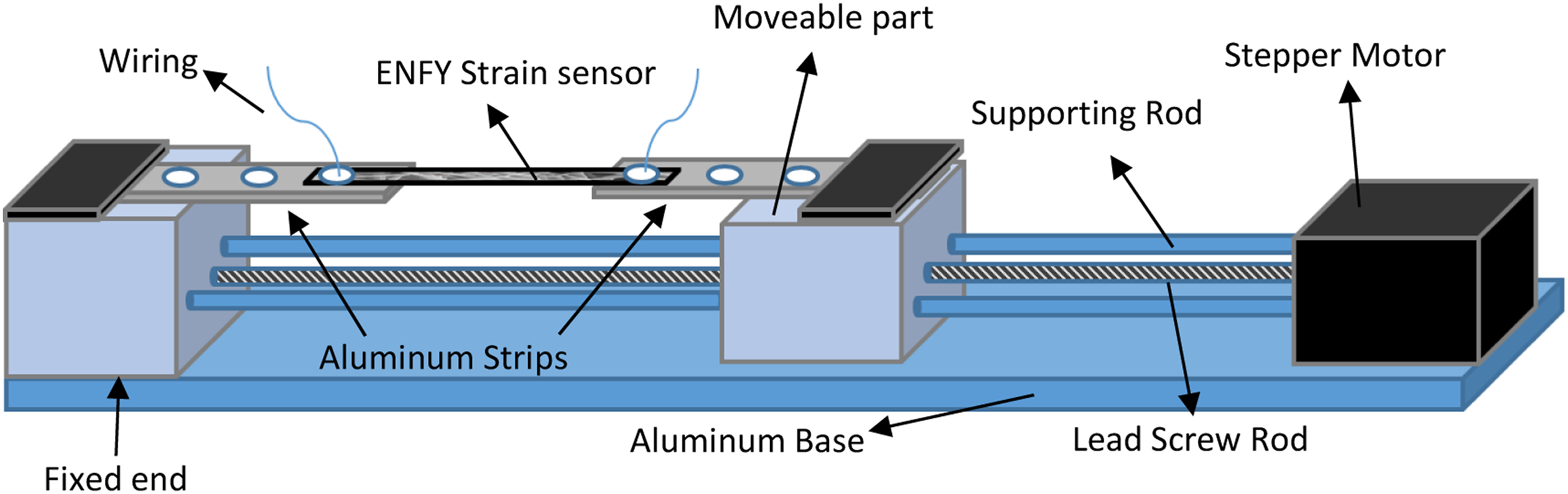
For the purpose of data acquisition during monotonic and cyclic loading tests and later during proprioceptive testing and speech recognition tests, the developed ENFY based sensor was connected to the Arduino microcontroller in Wheatstone bridge configuration. The Arduino microcontroller served to link the strain sensor to a computer and acted as an Analogue to Digital (ADC) converter. A schematic of the data acquisition system is shown in Figure 6. Schematic representation of the data acquisition system.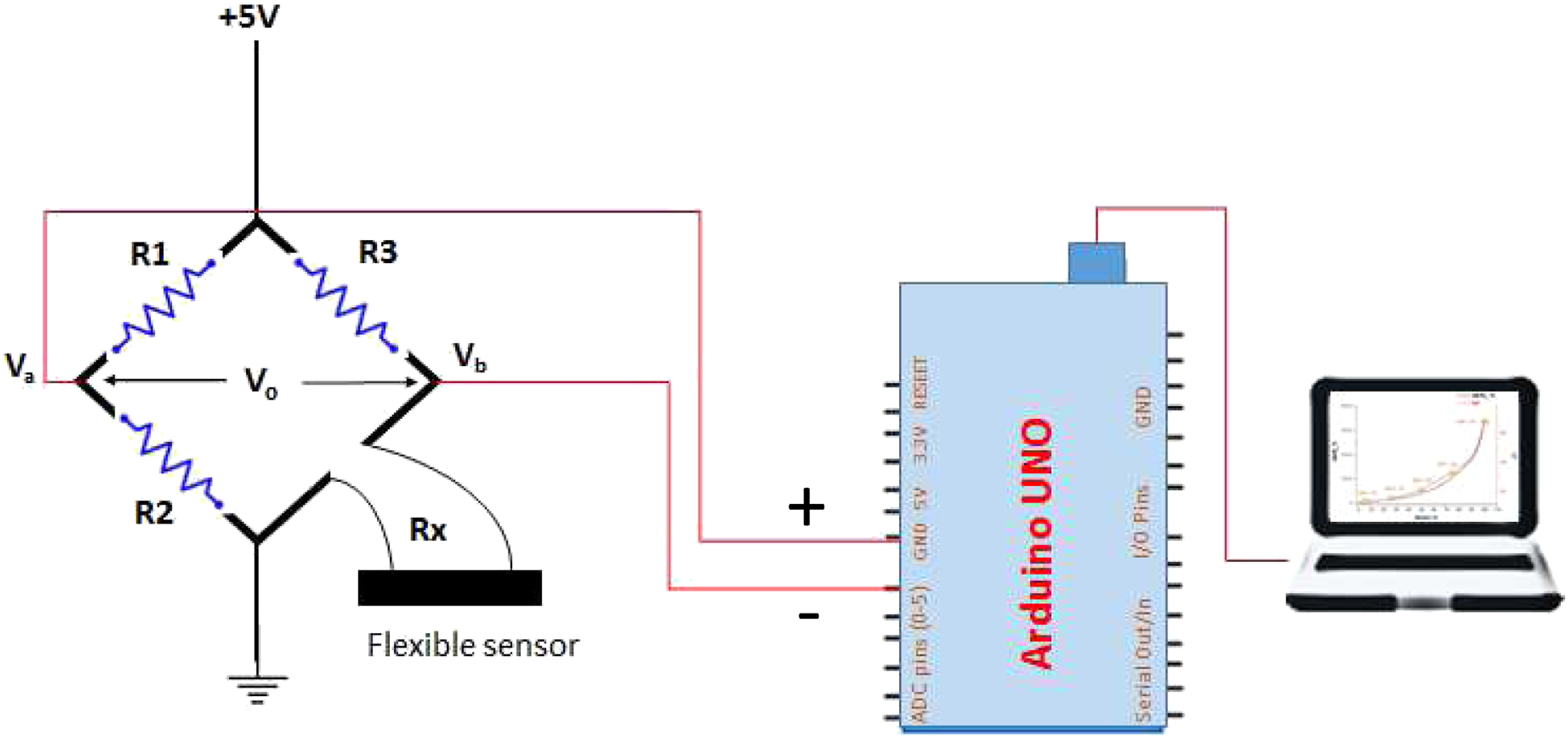
Results and Discussion
Morphological Analysis of ENFYs
The SEM images were taken using Secondary electron (SE) mode of FE-SEM, which confirms the morphology of developed Nanofibers. Figure 7(a) and (b) show the morphology of ENFYs developed directly through electrospinning with tunable morphology. Each yarn consists of twisted and aligned Nanofibers with an average diameter of 640 nm at 0% strain (Figure 7(c)). During tensile stretching, nanofibers tend to align themselves along the direction of load, and consequently the yarn diameter is reduced. The insets in Figure 7(d)–(f) show the average diameter of 410 nm, 320 nm, 280 nm at 30%, 60% and 90% strain respectively. FE-SEM images of thermoplastic polyurethane/carbon nanoparticles electrospun nanofibrous yarns (a) As-fabricated yarns at 1KX (b) As-fabricated yarns at 5KX. (c) electrospun nanofibrous yarn at 0% Strain (d) electrospun nanofibrous yarn at 30% Strain (e) electrospun nanofibrous yarn at 60% Strain (f) electrospun nanofibrous yarn at 90% Strain.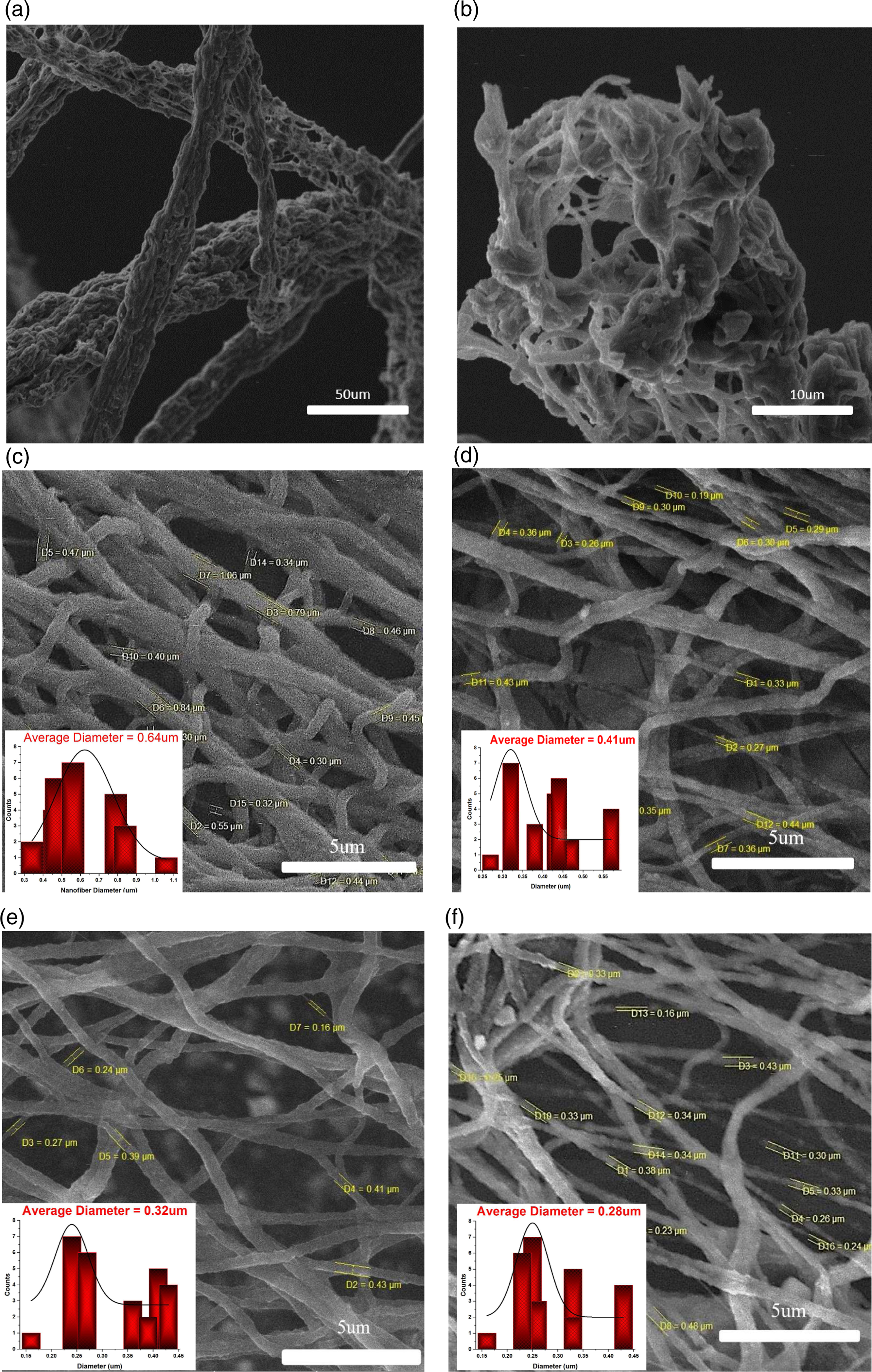
X-ray Diffraction
Figure 8 shows the X-ray Diffraction patterns of TPU Nanofibers as well as those of the composite TPU/CNPs Nanofibers. Pristine TPU as a semi-crystalline material gives a peak at 23° angle while the crystalline peak corresponding to [111] plane at 44° confirms the presence of crystalline Nanofibers. X-ray Diffraction patterns for Electrospun nanofibers obtained from pristine thermoplastic polyurethane as well as thermoplastic polyurethane/carbon nanoparticles conductive polymer composite.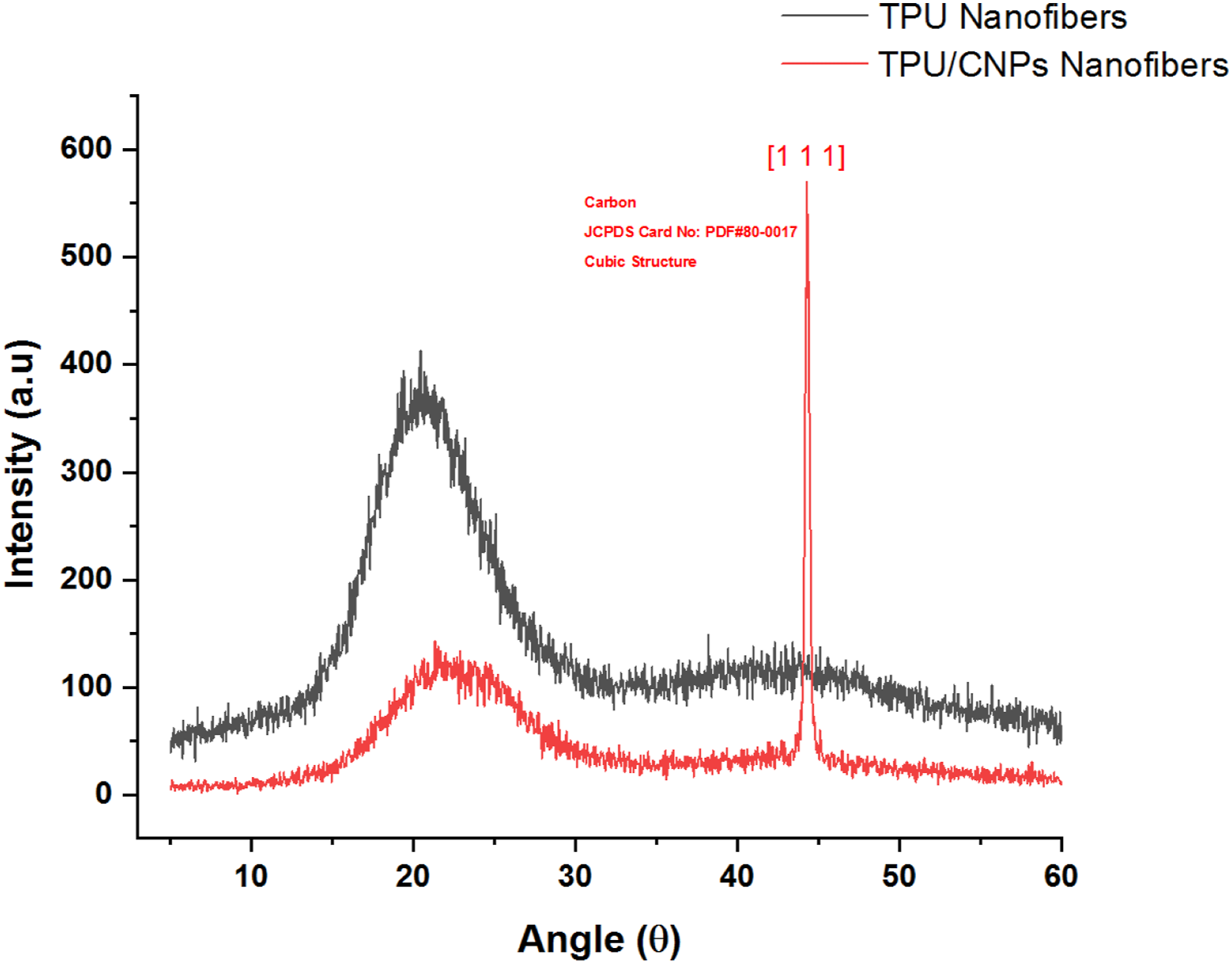
Thermal behavior of Electrospun Nanofibers
Thermogravimetric analysis of the CPC performed in inert atmosphere revealed two distinct degradation peaks at 386°C and 594°C respectively as shown in Figure 9. The first peak can be assigned to the thermal degradation of urethane bonds which represent soft segments of the polyurethane chain whereas degradation of polyols; the hard segments, can be attributed to the second peak at higher temperature.
43
Thermogravimetric analysis of the conductive polymer composite.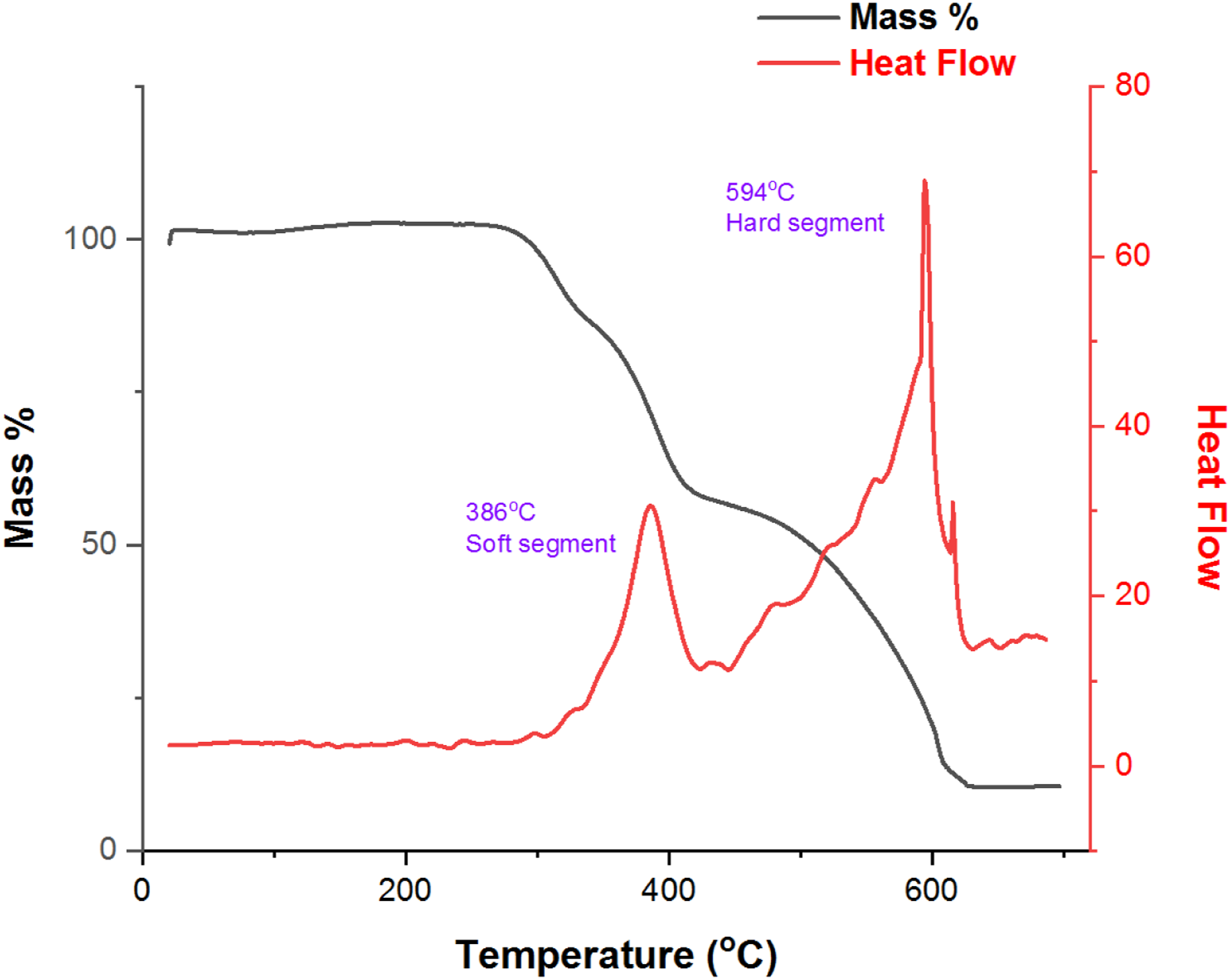
Sensitivity Measurement and Repeatability Test
For the measurement of sensitivity and repeatability, the ENFY strain sensor was attached to the fixed and moveable head of the linear actuator and stretched at a constant crosshead speed of 20 mm/min. The gauge factor was found to increase with strain in non-linear fashion owing to mutual untwisting, slippage and breakage of fibers in the ENFY core as shown in Figure 10(a). Ultimate failure of the ENFY strain sensor was registered at 102% strain with the maximum calculated gauge factor of 70 at 100% Strain. A comparison of gauge factors recently reported in the literature for various Piezoresistive sensors with the one in this work given in Figure 10(b) reveals that the gauge factor reported for ENFYs is among the highest for Piezoresistive sensors with relatively high maximum strain. (a) Variation of normalized resistance and gauge factor with strain (b) Comparison of gauge factors cited in the literature with the one reported in this work.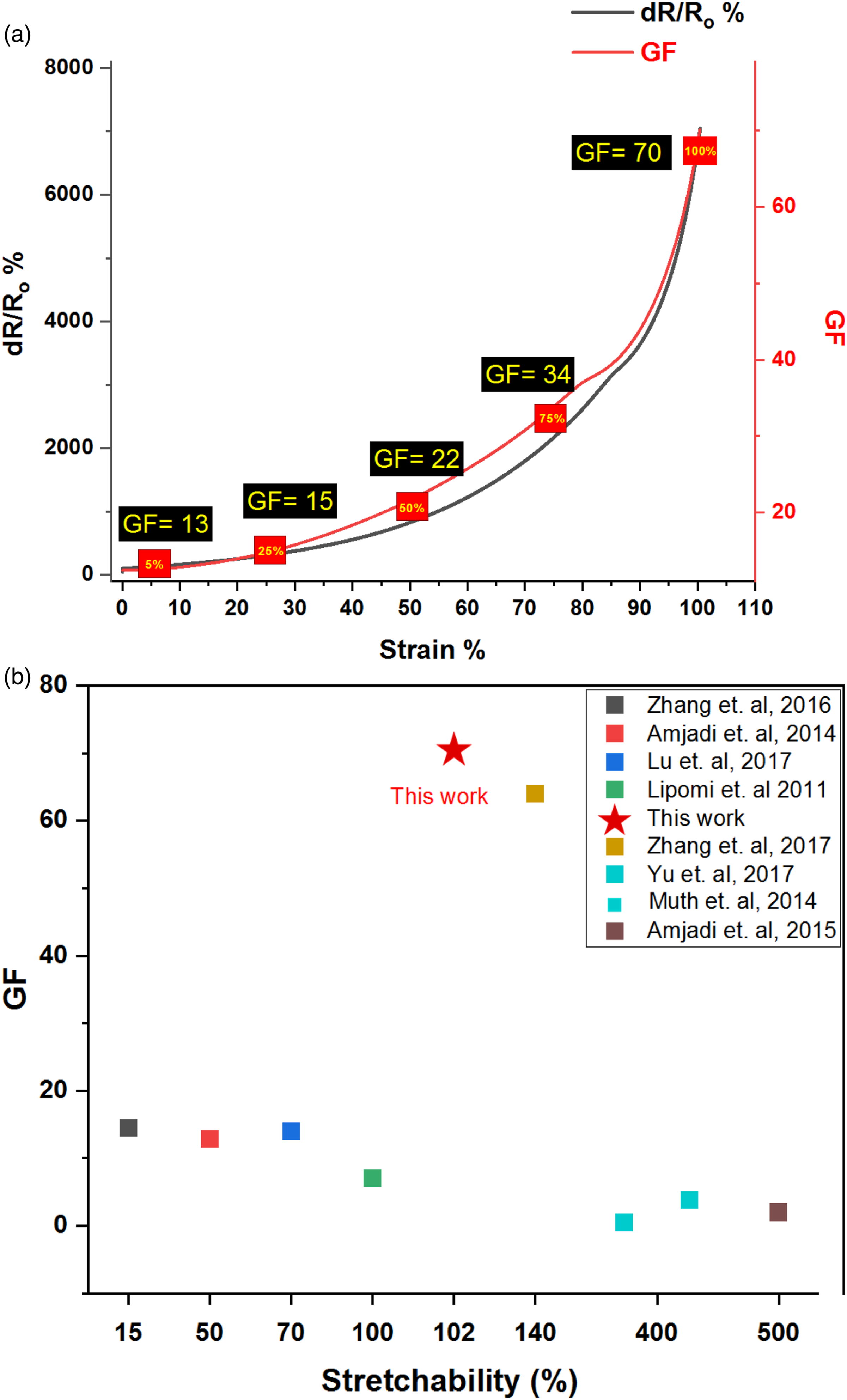
Figure 11 shows the ENFY strain sensor at various stages of tensile stretching. Electrospun nanofibrous yarn strain sensor stretched at. (a) 10% strain (b) 50% strain and (c) 100% strain.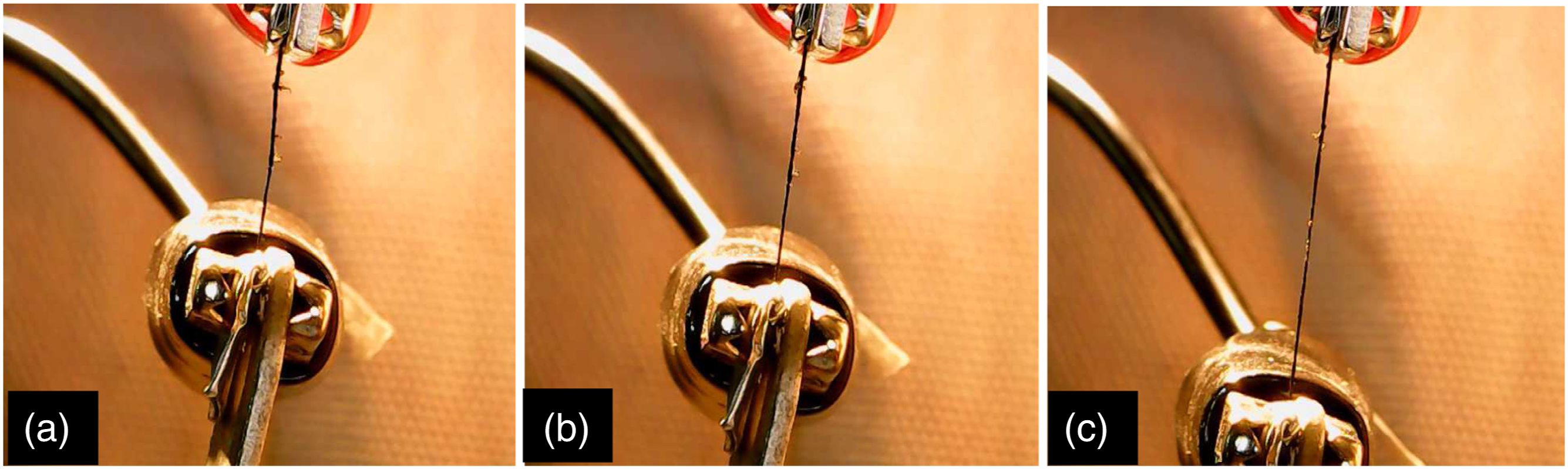
Long term application demands repeatability, which was confirmed by continuously stretching and releasing ENFY strain sensor at constant crosshead speed of 40 mm/min for 1000 cycles at 30% maximum strain as shown in Figure 12. The results show exceptional repeatability with no evidence of fracture of the ENFY strain sensor. Normalized resistance response plotted against number of cycles for the strain sensor.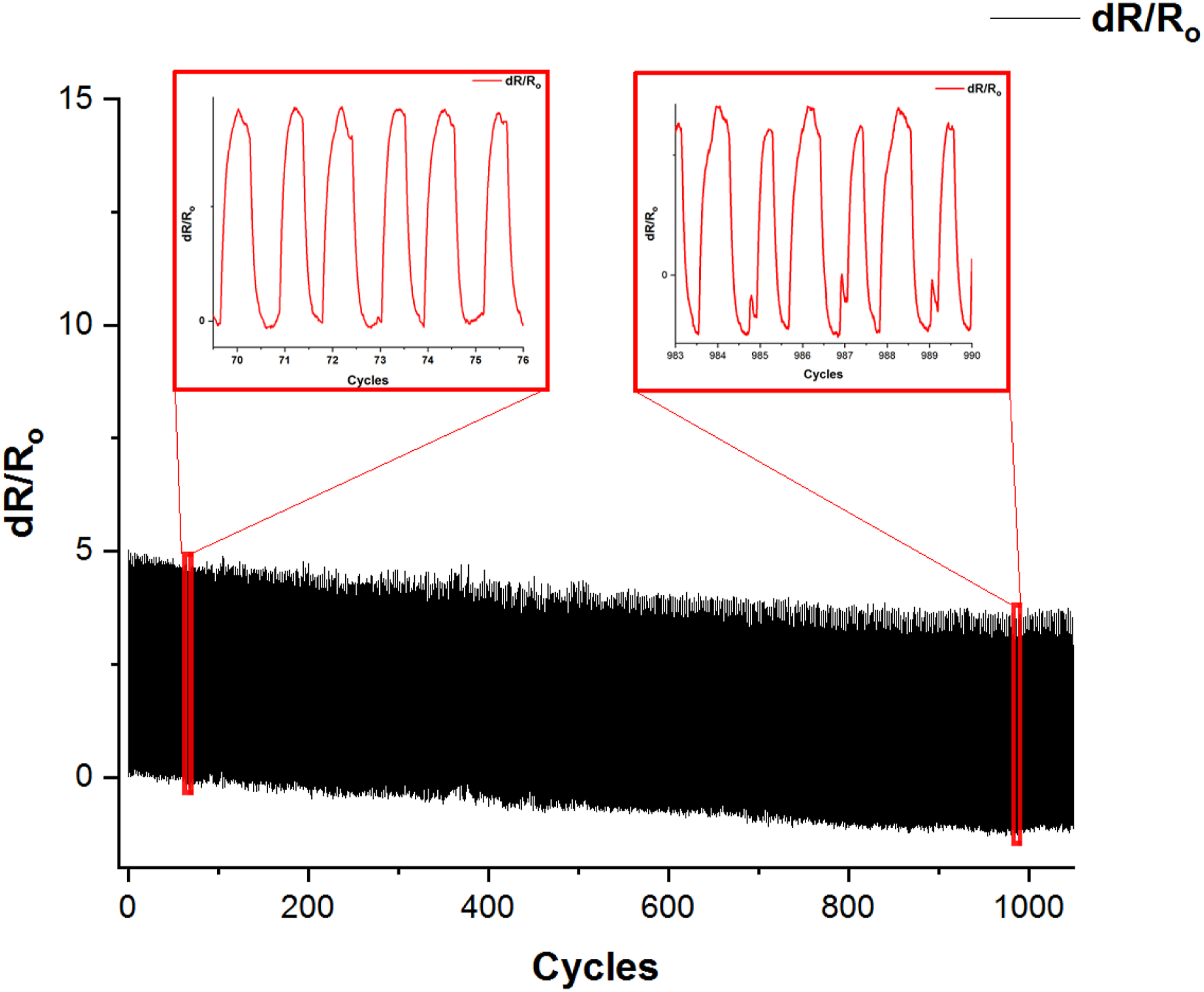
Proprioceptive Testing – Human Motion Detection
Proprioception or kinesthesia senses position, gestures, and behavior of the body. Natural proprioception in our bodies ensures bodily movements and functions as well as its interaction with its surroundings. For many applications involving human-machine interaction wearable strain sensors are required for proprioceptive testing. The ENFY sensor presented in this study was applied to various body parts/joints in order to demonstrate its applicability as a wearable strain sensor for the detection of a range of bodily motions/gestures as well as speech recognition as shown in Figure 13. Human torso frontal view with labeled regions where electrospun nanofibrous yarn strain sensor was applied for proprioceptive testing.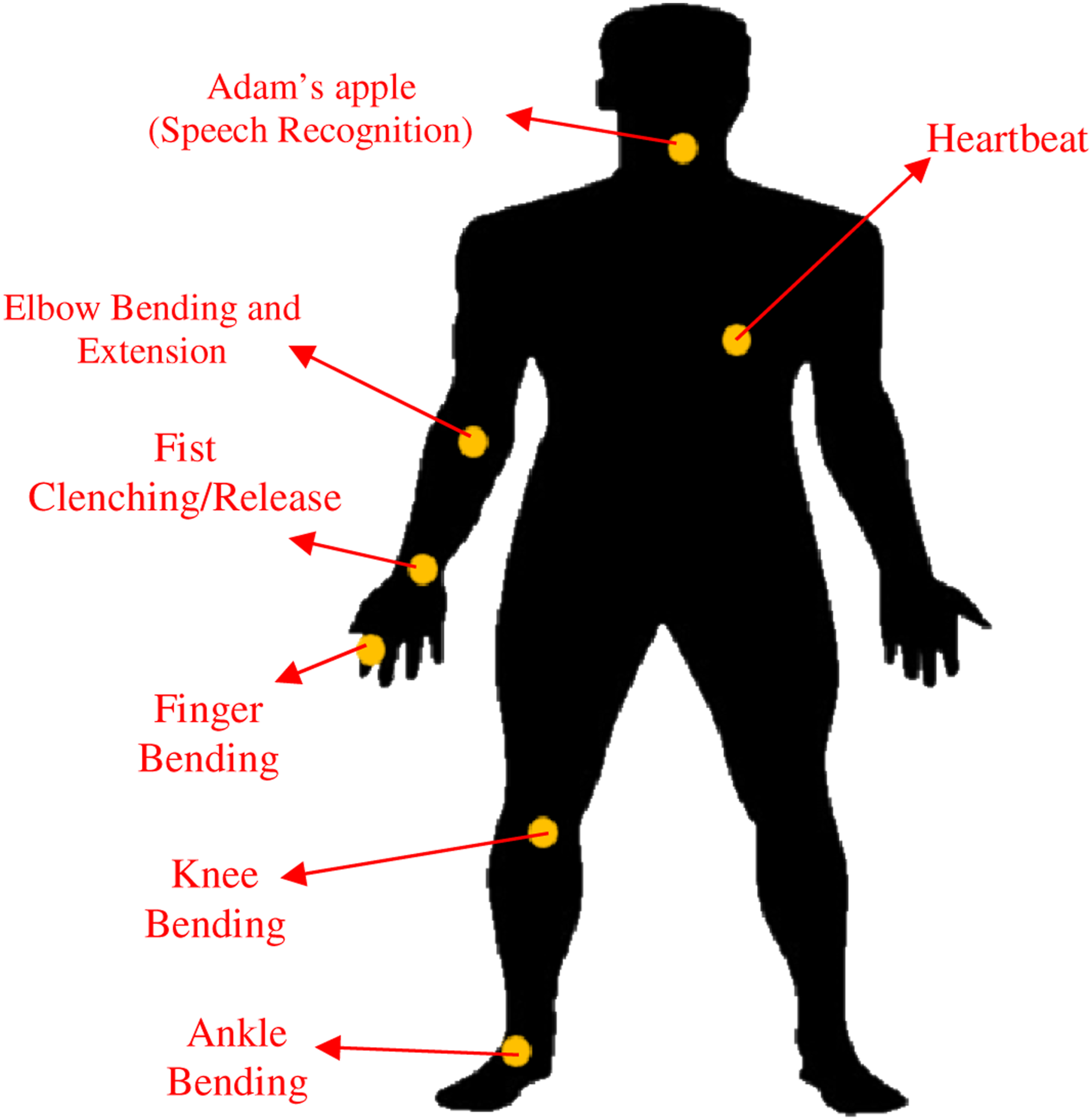
Figure 14(a) depicts motion of an index finger joint as detected by the ENFY strain sensor. As the finger joint bends multiple times to the bending angles of 30°, 60°, and 90° respectively, the relative change in electrical resistance was found to be repeatable with an increase in normalized resistance being registered with the increase in the bending angle. Electrospun nanofibrous yarn sensor response to (a) Finger bending (b) Fist clenching and releasing (c) Walking, jogging and sprinting/gamboling motions (d) Elbow bending and stretching (e) Plantarflexion and dorsiflexion of ankle (f) Heartbeat of a patient.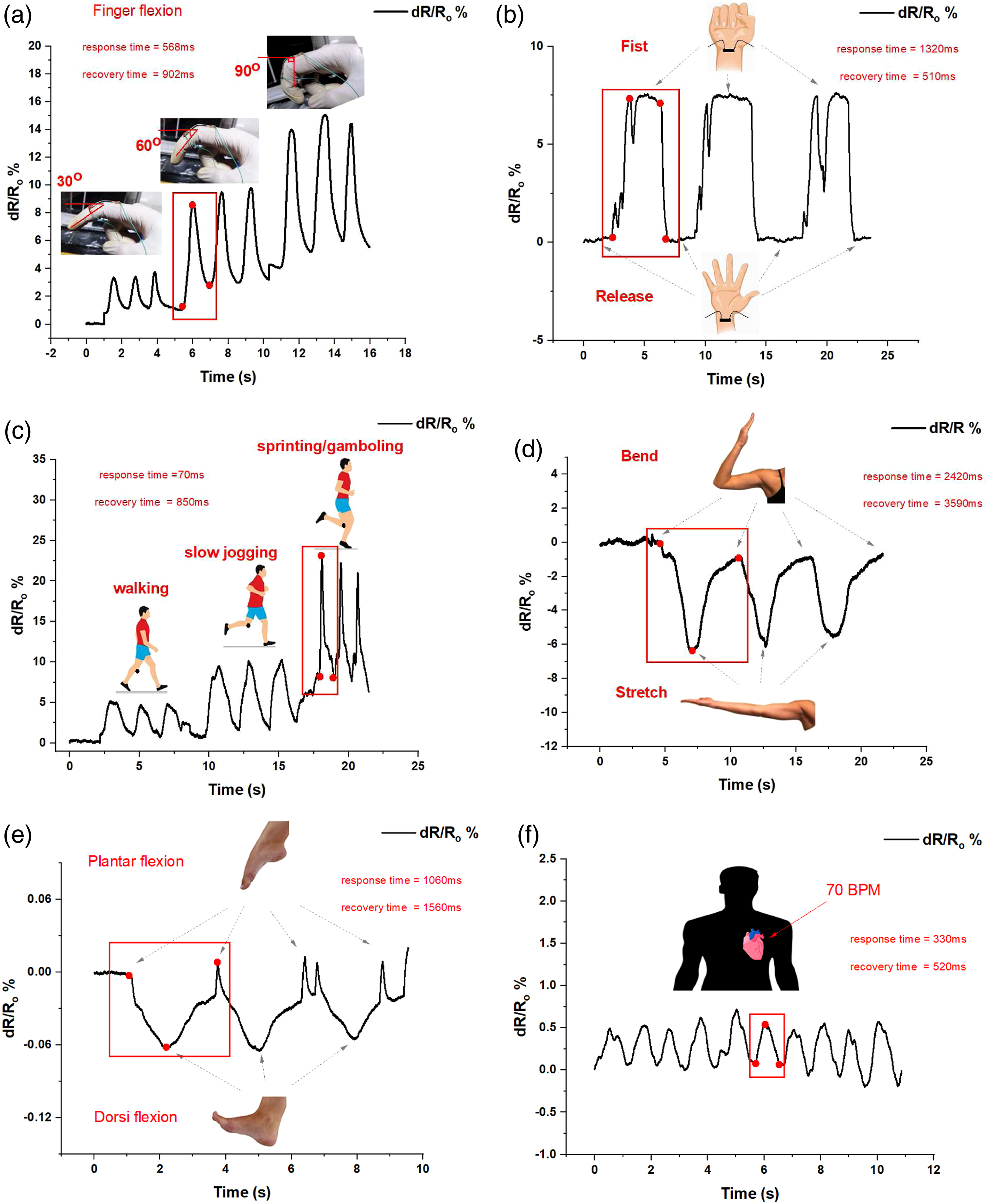
Figure 14(b) shows the response of the ENFY sensor when the fist is clenched and is then released. These motions were found to be easily detectable owing to high gauge factor of the sensor, with the crests and troughs in the normalized resistance plot corresponding to the clenching of fists and their release respectively.
Figure 14(c) shows the ENFY sensor response attached to the knee joint for the detection of walking, slow jogging, and sprinting/gamboling motions. The sensor response amplified as the intensity of the knee joint motion increased i.e. as the motion changed from slow walk to jog and ultimately to sprint. Similar response was observed when the ENFY sensor was attached to the elbow joint for the detection of elbow bending and stretching as shown in Figure 14(d).
When attached to the ankle the ENFY sensor (Figure 14(e)) was found equally capable of detecting 'dorsiflexion' and 'plantarflexion' associated with the ankle. Finally, ultrasensitive behavior of ENFY sensor can be observed in Figure 14(f) where the strain sensor was used to measure the heart rate of a patient (70 BPM).
Speech Recognition
One of the important aspects of human-machine interaction is speech recognition. The importance of such systems is increasing with the emergence of soft computing and flexible sensors and actuators. To evaluate the speech recognition behavior of the developed sensor, the ENFY sensor was attached to the Adam’s apple (Figure 15) and different words were uttered while the normalized resistance response of the sensor was registered. Schematic of electrospun nanofibrous yarn sensor attached to the Adam’s apple.
The ENFY sensor response to different words comprising of single syllables and multiple syllables as well as the breathing and swallowing action of a human subject are shown in Figure 16(a)–(i). Compound words were detected by corresponding peaks in the normalized resistance response for instance the word “Allah” and the word “Allah o Akbar” shows close resemblance but the multiple peaks registered by the utterance of the latter (Figure 16(b)) makes it clearly distinguishable from the monosyllabic former (Figure 16(a)). The normalized resistance response of the ENFY sensor to common English greetings “Hi” and “Hello” are given in Figure 16(b) and (c) respectively which again demonstrate the capability of the sensor to clearly distinguish the two owing to distinctive responses. The sensor response to the letters I, S and T is given in Figure 16(e) whereas the response to words Institute, Space and Technology given in Figure 16(f) show the rise in normalized resistance curve with the intonation associated with a particular word. Figure 16(g) gives the normalized resistance response to each of the 26 Latin alphabets whereas the sensor response to breathing and swallowing action if given in Figures 16(h) and (i) respectively. The inhaling and exhaling components of the breathing action are clearly discernable by the crests and troughs, respectively in the normalized resistance curve (Figure 16(h)). Electrospun nanofibrous yarn sensor response to different words (a) Allah (b) Allah-o-Akbar (c) Hi d) Hello (e) I S T (f) Institute Space Technology (g) Latin alphabets comprising of 26 letters (h) Breathing action (i) Swallowing action.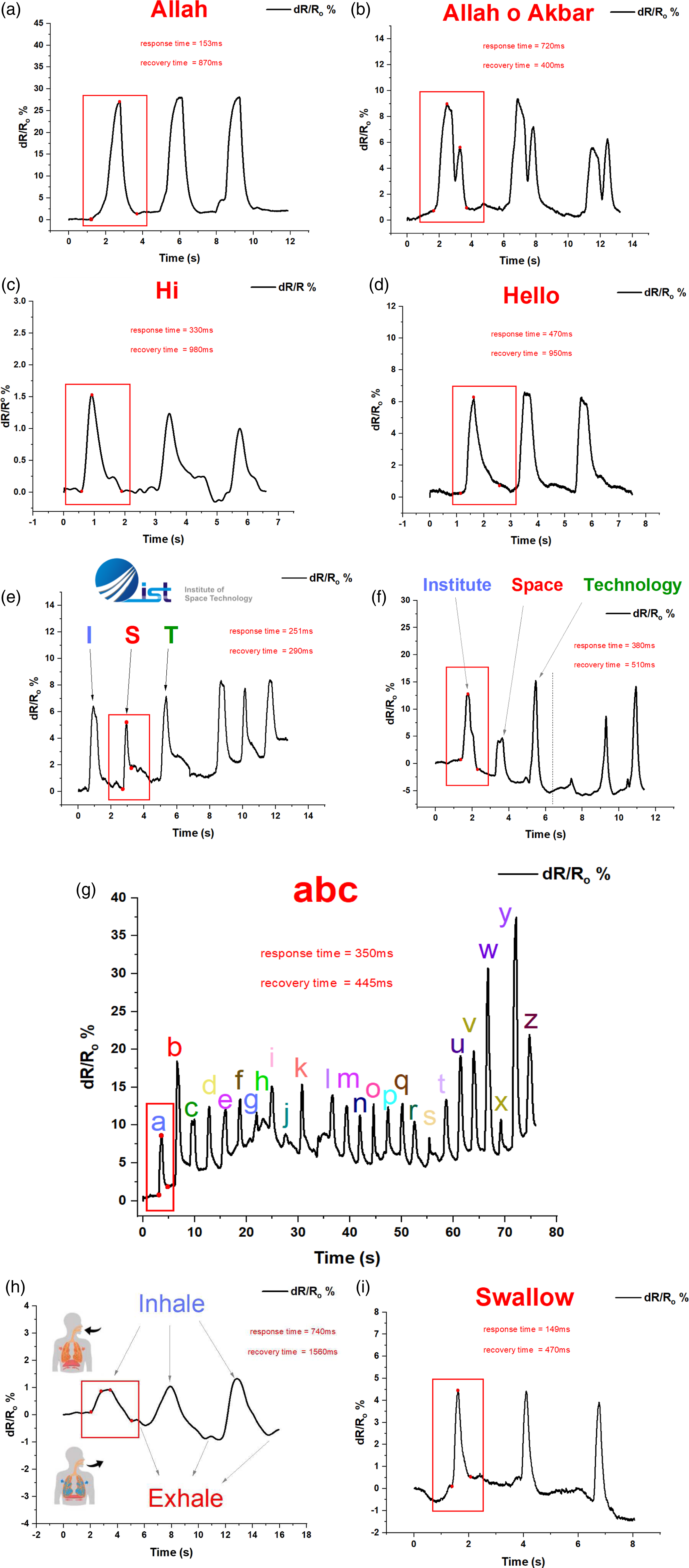
Conclusion
An ultra-sensitive ENFY based flexible strain sensor was developed by employing a conventional electrospinning setup. The twisted configuration of the electrospun nanofibers was achieved by using placing a cotton cloth over the Aluminum collector. This simple modification to the electrospinning set-up allowed the rolling of electrospun nanofibers over the collector due to inherent whipping action of the jet travelling towards the collector resulting in the deposition of twisted nanofibers resembling yarns. The ENFY sensor was obtained using the aforementioned technique using the CPC solution comprising of CNPs and TPU in DMF and chloroform mixture. Morphological analysis of the developed Piezoresistive yarns revealed a hierarchical structure comprising of randomly oriented nanofibers with an average measured diameter of 640 nm. Electromechanical characterization was carried out using a linear actuator. The ENFY strain sensor demonstrated high sensitivity with the gauge factor increasing progressively with strain. The calculated value of gauge factor was 13 for 5% strain which increased to 22 for 50% strain and ultimately to 70 for 100% strain. Experiments were also performed to assess the feasibility of the ENFY strain sensor for human motion detection and speech recognition. The experimental findings indicate that the ENFY strain sensor not only performs well for motion identification wing to stretching and relaxation action of nanofibers during the movement of various body parts such as fingers, hands and knee joints etc. owing to high sensitivity and flexibility, the sensor can also detect human body’s physiological activities such as heart rate, breathing and gulping actions. Moreover, the sensor could detect and clearly distinguish between words based on their syllables and intonation. These results clearly demonstrate the feasibility of the novel ENFY sensors for wearable devices, soft robotics and human-machine interaction.
Footnotes
Acknowledgements
We would like to acknowledge the contribution of the Office of Research Innovation and Commercialization for providing us work space during the course of the research. We would also like to thank Mr. Muhammad Suleman, Mr. Inzamam ul Haqq, Mr. Muhammad Arshad and other staff of ORIC for voluntarily agreeing to participate in some of the tests reported in the research work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.