
Abstract
This paper investigates the impact of different automated vehicle (AV) communication concepts on pedestrians' perceived trust when interacting with the AV in an urban intersection setting. For this, two virtual reality (VR) studies were conducted. The first examined the influence of vehicle automation on how pedestrians interpret driving behavior, while the second analyzed the effects of explicit communication concepts on pedestrians' perceived trust. The results show that AV driving behavior evokes similar associations as manually driven vehicles, with overall perceived trust scores not differing considerably (with driver: 4.7, without driver: 4.6). However, qualitative interviews revealed that pedestrians ultimately interpret AV behavior differently, yielding insights into the applicability of driving behavior of manually driven vehicles as a model for AV driving behavior. The second study showed an increase in pedestrians' perceived trust when vehicle-based explicit communication was present (mean: 4.9). In contrast, infrastructure-based communication showed no difference compared to implicit communication (mean: 4.6). The investigation of the influence of the traffic infrastructure (presence of traffic lights) has shown different results for implicit and explicit communication of AVs. For implicit communication, pedestrians' perceived trust increased with traffic lights (mean: 4.8) compared to scenarios without them (mean: 4.4). However, for explicit communication, the perceived trust decreased with traffic lights (vehicle-based: 4.7, infrastructure-based: 4.6) compared to scenarios without traffic lights (mean: 5.1). One reason for this is possible cognitive overload caused by the perception of multiple visual aids that are not always in the same field of view.
Worldwide, the number of total road traffic deaths reached 1.2 million in 2019, with almost half of them being non-motorized vulnerable road users (VRUs) such as pedestrians and cyclists. While the absolute number of pedestrians killed in road traffic crashes has decreased in the last decade, they still make up a share of more than 85% of worldwide VRU deaths in road traffic ( 1 ). Furthermore, a high number of crashes between pedestrians and motorized traffic at intersections was found to be caused by the pedestrian misinterpreting the driver’s intentions ( 2 ). Furthermore, vehicle manufacturers and mobility providers are working heavily on deploying automated vehicles (AVs), with the first (partially) automated mobility services being offered in the U.S.A. and Europe in recent years. With the accompanying introduction of (partially) automated safety features, such as lane-keeping systems and adaptive cruise control, AVs promise to reduce the number of crashes and road traffic injuries ( 3 ). At the same time, new challenges in the interaction and communication between AVs and VRUs arise through the absence of a driver, who can clarify ambiguous situations through, for example, a hand sign signalizing a safe crossing situation for a pedestrian. To overcome this social interaction void arising with the introduction of AVs, public acceptance is essential. It has been shown that one of the main drivers for public acceptance of technological systems is the perceived trust of humans in technological systems, including both the general trustworthiness of technologies as well as individual technology-related trust ( 4 ). Consequently, researching the parameters and inter-dependencies influencing the public and individual trust-building in AV–VRU interactions is a vital task in transportation research.
Research has proposed different strategies to overcome the social interaction void of AVs by communicating the AV’s intention to VRUs (mostly pedestrians) through implicit or explicit communication concepts ( 5 , 6 ). On the one hand, it has been shown that movement patterns (driving behaviors) are the central source of information in road traffic (implicit communication) ( 5 ). On the other hand, a variety of external human–machine interfaces (eHMIs), such as monitors or light-emitting diode (LED) strips on the vehicle, have been proposed by research and the automotive industry to overcome ambiguous situations between AVs and pedestrians (explicit communication) ( 6 ). Since the findings on the importance of implicit communication in AV–pedestrian interactions has put an elevated focus on the implementation of motion cues in the movement patterns (driving behaviors) of AVs, it appears natural to evaluate AV movement patterns based on common driving behaviors employed by human drivers. However, this approach assumes that pedestrians interpret the driving behavior of an AV in the same way as that of a human driver, which has not yet been conclusively proven ( 7 – 10 ).
In addition, there is no clear consensus on the influence of explicit communication concepts on pedestrians’ perceived trust in AV–VRU interactions ( 10 – 13 ). Therefore, the research questions in this paper are as follows. (1) Does the presence of a human driver and their driving style have an influence on pedestrians’ perceived trust? (2) How do different explicit communication concepts (vehicle- and infrastructure-based) influence pedestrians’ perceived trust? 3) How does additional traffic infrastructure (presence of traffic lights) affect the perceived trust of pedestrians for both implicit and explicit communication with AVs.
This paper is organized into four main sections. While the first deals with the theoretical background, the second section introduces the methodology of this study. Afterwards, the presentation and discussion of results is given. Finally, a conclusion is provided.
Literature Review
The theoretic background of this study is presented in the following section. Firstly, a general model describing the interaction and communication process between AVs and VRUs is introduced, before communication concepts such as implicit or vehicle- and infrastructure-based explicit communication are described. Finally, measures of trust in AV–pedestrian interactions are elaborated before a systematic overview of related work is provided.
AV–VRU Interaction and Communication Model
Interaction and communication processes between different road users can be divided into two overarching categories. On the one hand, there are intent indicators prescribed by road traffic regulations, such as the turn signal or the brake light. In deviating unregulated circumstances, on the other hand, there are spontaneous, flexible, and often more complex exchanges for which other informal means of communication are used ( 14 ). An example for a deviating unregulated circumstance is the use of blinking lights to communicate a vehicle driver’s intent to a pedestrian. While the signal might be interpreted by the pedestrian as a sign that the vehicle is letting them cross the street, it might also be interpreted as warning signal that the vehicle is claiming the right of way. In addition, road traffic situations are characterized by often lasting for only a short period of time and being highly critical ( 15 , 16 ). As a result, communication processes are often short-lived and directed.
There are multiple models that offer a thorough representation of the interaction between AVs and VRUs; most of these models refer to the interaction of a single pedestrian with an AV. A commonly referred to model for the interaction of a single VRU with an AV is the situational awareness model by Endsley ( 17 ) that involves the VRU perceiving the situation, comprehending the situation, and drawing conclusions. This model was applied to AV–VRU interactions by Palmeiro et al. ( 18 ) and can be seen in Figure 1.
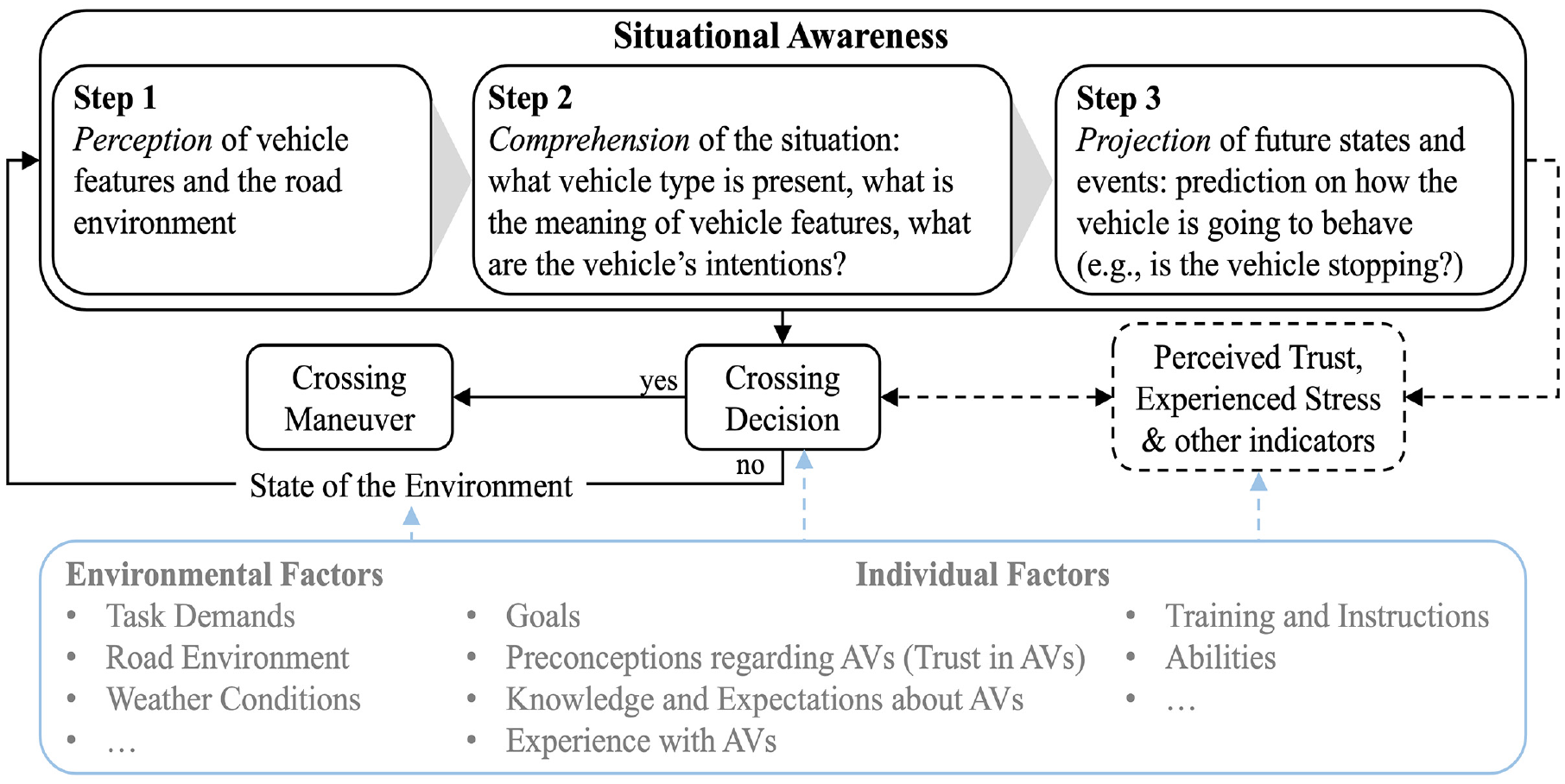
In the first step of situation awareness, the VRU perceives the situation, including the vehicle with its features, such as speed, direction, and size, as well as the road environment, such as the presence of other vehicles, pedestrians, and obstacles. In the second step, the VRU comprehends the situation. This involves the VRU’s ability to understand the meaning of the situation and to draw conclusions based on the available information. In the third step, the VRU projects the future state of the situation. This involves the VRU’s ability to anticipate what will happen next and to plan accordingly, while considering factors such as the speed and direction of the vehicle, the presence of other vehicles or pedestrians, and the road layout.
Communication Concepts
As described in the previous section, the interaction and communication between different road users is a complex process involving not only the direct intent communication between road users but also external circumstances, such as environmental or individual factors (see Figure 1). Furthermore, in deviating unregulated situations, spontaneous, flexible, and often more complex exchanges of information can occur using other informal means of communication. This section describes implicit and (vehicle- and infrastructure-based) explicit communication concepts by the example of AV-to-pedestrian interaction at an intersection.
Implicit Communication
Implicit communication refers to non-verbal cues and behaviors that road users exhibit while driving or walking. These behaviors are not necessarily intended to communicate a specific message, but can still convey information about the road user’s intentions and actions. Examples of implicit communication include the speed and lateral position of a vehicle, pedestrians’ gaze direction, and the use of turn signals ( 10 – 13 ).
While different studies have shown potential advantages of implicit communication, it should be mentioned that the crossing decision of pedestrians is not exclusively the result of the driving dynamics of the approaching vehicle, but is also influenced by an array of other factors such as the traffic situation, the environment ( 19 , 20 ), and cultural differences ( 21 ). The advantage of implicit communication lies primarily in that perception and comprehension are more intuitive for the majority of VRUs compared to explicit communication concepts. Vehicle driving behavior can be perceived and interpreted from a multitude of perspectives. This also means that communication is not limited to one recipient. Information can be passed on to many VRUs at the same time ( 22 ). In addition, vehicle movements can be perceived in a single glance. This provides the possibility to assess the intentions of several vehicles in a very short time interval ( 23 ).
Vehicle- and Infrastructure-Based Explicit Communication
Explicit communication refers to the use of verbal or non-verbal cues that are specifically intended to convey a message. Examples of explicit communication include hand gestures, verbal commands, and the use of horns or headlights, besides other concepts. Explicit communication is often used in situations where implicit communication is insufficient or ambiguous. For example, a pedestrian who wants to cross the street may use a hand gesture to signal to a driver that they should stop. Similarly, a driver who wants to turn left at an intersection may use their turn signal to indicate their intention to other drivers. One of the challenges of explicit communication is that it requires both parties to understand a set of signals and cues in the same way. In some cases, different cultures or regions may have different conventions for explicit communication, which can lead to confusion or misinterpretation ( 10 – 13 ).
In the context of AV–pedestrian communication, eHMIs refer to the use of visual and/or acoustic cues or anthropomorphic elements on the vehicle to facilitate vehicle-based communication between AVs and pedestrians. They can be seen as a form of vehicle-based explicit communication, as they provide direct information about the AV’s behavior and intentions to the pedestrian, which can help to reduce uncertainty and improve safety for pedestrians, particularly in complex or ambiguous traffic situations ( 24 – 29 ). However, the effectiveness of vehicle-based eHMIs depends on factors such as the design of the interface, the context of use, and the cultural background of the road users involved ( 30 , 31 ).
Infrastructure-based explicit communication, on the other hand, involves information exchange between AVs and the surrounding traffic infrastructure, such as traffic signals or road signs, to convey information about the intentions of the AV to other road users ( 32 , 33 ).
Measures of Trust
To evaluate the perceived trust of participants in AV–pedestrian interactions, researchers use a wide range of indicators and measures. These measures are typically categorized into subjective, objective, and supplementary measures of trust.
Subjective measures of trust are widely used in research on AV–pedestrian interactions because they provide valuable insights into participants’ perceptions and attitudes toward AVs. These measures are typically collected through questionnaires or surveys that ask participants to rate their level of trust on a Likert scale or in percentage terms. Researchers may ask participants to rate their level of trust in the AV’s ability to detect and respond to pedestrians or cyclists, or in the AV’s overall safety and reliability. Subjective measures of trust can also be used to assess the impact of different factors on participants’ trust, such as the AV’s driving style, communication strategies, or the presence of a human backup driver ( 34 ).
A highly validated and widely used model to evaluate the perceived trust in automation is the “trust between humans and machines” model proposed by Muir ( 35 ). The model reflects the dynamics of trust in technical systems by considering six sub-categories, each reflecting a certain aspect of trust or mistrust. These sub-categories are the technical competence of humans, the predictability of the technical system, the dependability of the technical system, the fiduciary responsibility of the technical system, the reliability of the technical system, and the faith of humans in the technical system.
Objective measures of trust require specialized equipment to collect and analyze. In these studies the participants’ trust is inferred from their behavior and physiological responses during the interaction with the AV. For example, researchers may measure participants’ heart rate variability to assess their level of stress or anxiety during the interaction with the AV. Other objective measures of trust include eye-tracking and galvanic skin response ( 34 , 36 ).
Supplementary measures are used to assess additional factors that may influence participants’ perceived trust in AV–pedestrian interactions. These measures include the pedestrians’ age, familiarity with AVs, the AV’s communication concept, whether the approaching car is an AV or not, and the willingness to take risks and violate traffic rules ( 7 ).
It has been shown that findings in trust research are primarily based on subjective assessments, with 75% of relevant research articles using only subjective measures. An additional 14% of relevant research articles combine subjective and objective measures and only 11% used no subjective measures at all ( 34 ).
Previous Work
There has been a variety of studies dealing with different aspects of AV–pedestrian interactions. These studies can be generally categorized according to the methodology, such as video-based studies, virtual reality (VR) simulator studies, or experiments involving physical prototypes of AVs ( 37 ). This section focuses on previous VR-simulator studies. As shown in Table 1, the studies of interest can be further classified according to several characteristics.
Classification of Previous Work on Automated Vehicle (AV)–Pedestrian Interactions Conducted in Virtual Reality Experiments
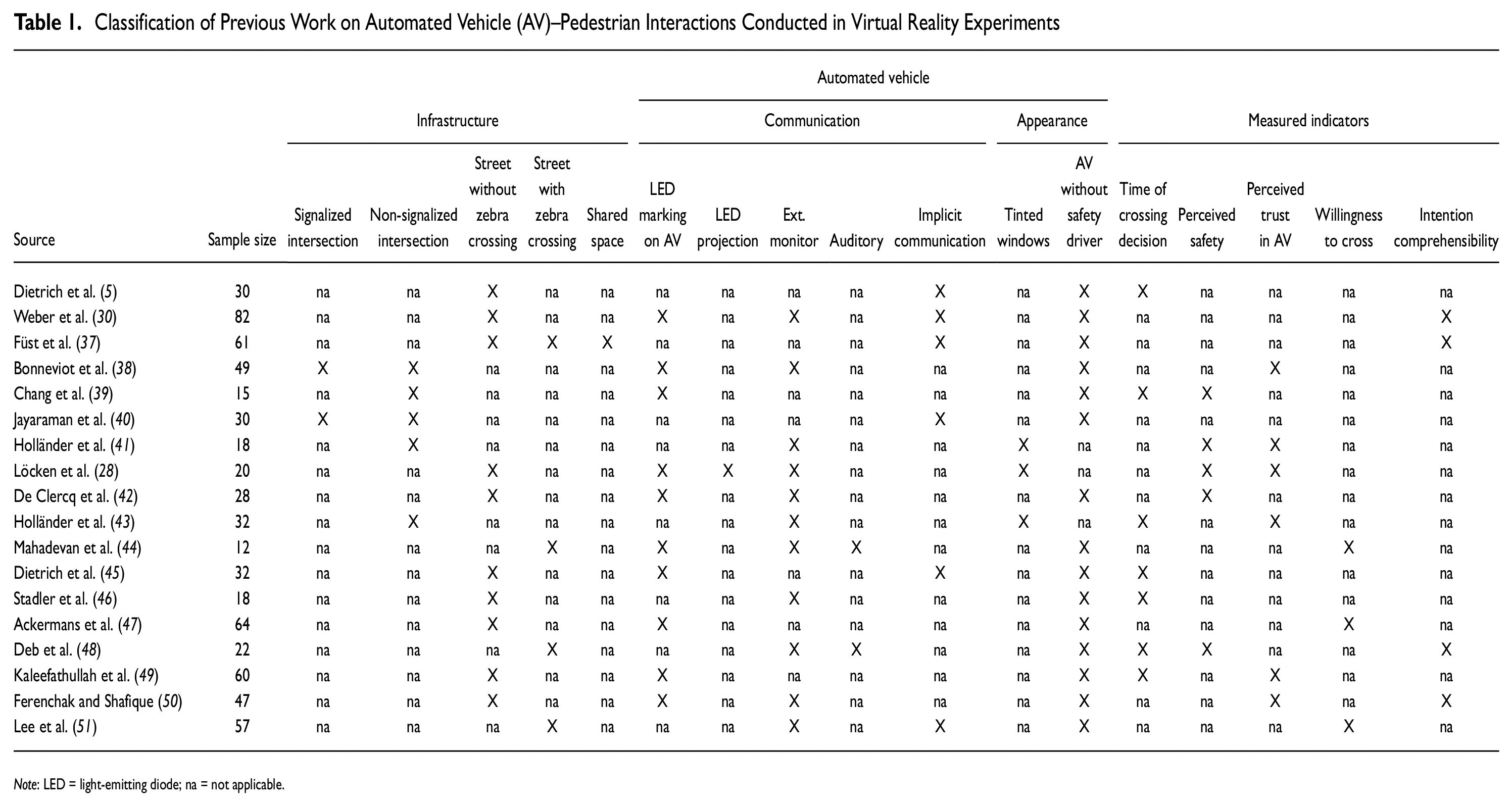
Note: LED = light-emitting diode; na = not applicable.
Analyzing the studies according to the investigated infrastructure type, one can see that mainly scenarios where pedestrians have to cross an AV’s trajectory on an intersection on a street are investigated, while only a single study further investigated AV–pedestrian interactions in a shared space scenario. For the crossing scenarios, a distinction is made between signalized or non-signalized intersections and streets with and without a zebra crossing. For both intersections and street links, the difference lies in the availability of an infrastructure component that clearly defines the right of way in a potential interaction of pedestrians and AVs. Furthermore, different communication concepts are covered by the studies of interest. Some studies investigate the influence of implicit communication parameters on the AV–pedestrian interaction, but most of the studies either relate them to or solely investigate the influence of different explicit communication concepts in the form of eHMIs. Most of the studies use LED markings and/or external monitors as eHMIs on the AV. Less often, LED projections or auditory eHMIs are investigated. In addition, most of the studies let the AV appear without a safety driver, while some studies chose to represent the AV as a vehicle with tinted windows. Finally, the studies can be classified according to the measured indicators. While some studies investigate the time of the crossing decision, primarily subjective measures are used. These subjective measures include the perceived trust and safety of pedestrians, their willingness to cross, or the ability of the pedestrian to comprehensibly understand the AV’s intention (intention comprehensibility).
Evaluating the results of the studies of interest, a mismatch in the interpretation of the importance of implicit and/or explicit communication concepts in AV–pedestrian interactions can be investigated. On the one hand, some studies show that pedestrians use vehicle dynamics to infer the vehicle’s intention ( 5 , 21 , 22 , 37 , 40 , 52 ) and pedestrians in general assign a higher priority to implicit communication through driving dynamics in road traffic than to explicit communication through signs and gestures ( 8 , 9 , 51 , 53 ). On the other hand, some studies have shown that eHMIs can even outmatch current communication between AVs and pedestrians because the communication is clearer and earlier available ( 10 , 38 , 39 , 42 , 50 ).
Research Gap and Contribution of this Study
The interaction between pedestrians and AVs remains a critical area within the domain of urban traffic safety and AV development. Despite significant advancements in AV technology, understanding the nuanced dynamics of pedestrian–AV interactions, especially with respect to perceived trust and communication strategies, is paramount for the seamless integration of AVs into urban traffic systems. Previous research has mainly focused on the technical aspects of AV development, with limited attention paid to the human-centric dimensions of AV–pedestrian interactions, which are crucial for high acceptance levels of AV systems. Moreover, existing studies have not thoroughly explored the comparative impact of implicit and explicit communication strategies employed by AVs on pedestrian behavior and trust levels. The ambiguity in pedestrian interpretation of AV intentions further highlights the need for a comprehensive investigation of communication strategies between AVs and pedestrians.
This study contributes to the existing literature on AV–pedestrian interactions in urban areas with different aspects. Firstly, it undertakes a comprehensive analysis of pedestrians’ perceived trust in AVs, comparing scenarios that feature explicit communication aids against scenarios that include solely implicit communication concepts, to evaluate different communication strategies that have been suggested by existing research on deployment of AVs. Secondly, the impact of infrastructure elements that clearly define the right of way at intersections, such as traffic lights, on how pedestrians perceive trust and safety during their interaction with AVs has been investigated. Through this, it is explored how external factors (in this case infrastructure elements) influence pedestrian behavior and their interactions with AVs. Thirdly, the study provides a qualitative evaluation of how pedestrians interpret the driving behavior of AVs. This assessment enhances our understanding of the human factors at play in AV–pedestrian interactions.
Methodology
This section discusses the methodology of this study. Firstly, the overall study goals as well as the study procedure are described before resources and participants for the conducted VR studies are introduced. Finally, the experimental design is described, covering the independent and dependent variables of both VR studies.
Study Goals
As discussed in the section Previous Work, there is a mismatch in the interpretation of the importance of implicit and/or explicit communication concepts. Therefore, one goal of this study is to investigate whether implicit communication concepts (or driving behavior, see the section Implicit Communication) of manually driven vehicles can be used as a model to develop implicit AV communication concepts. For this, two aspects of implicit communication will be illustrated. On the one hand, the pedestrian’s perceived level of trust when interacting with manually driven vehicles and AVs is investigated quantitatively. On the other hand, a qualitative evaluation of the potentially different interpretations of implicit communication concepts is carried out to further investigate whether the presence of a driver influences the results.
Another goal is to investigate the influence of different explicit AV communication concepts on pedestrians’ perceived aggressiveness of AV driving behavior and the resulting perceived level of trust in the AV. For this, both a vehicle- and an infrastructure-based explicit communication concept will be derived from previously analyzed literature (see the section Communication Concepts).
As discussed in the section AV–VRU Interaction and Communication Model, the intent of communication is not the only factor that determines the comprehension and understanding of pedestrians while interacting with AVs, but also, for example, environmental factors such as the road environment. Therefore, the influence of traffic infrastructure (presence of traffic lights) on pedestrians’ perceived level of trust will be examined. Investigating this for both the discussed implicit and explicit communication concepts allows for a direct comparison of the results.
Study Procedure
In the following section, the study procedure is illustrated. Firstly, the overall two-fold structure of this study is presented with the specific hypotheses of interest. Furthermore, the specific study procedure as well as the experimental task are described.
Overall Structure and Hypotheses
The overall study procedure is shown in Figure 2. The initial literature review (see the section Literature Review) leads to the chosen two-fold study procedure of this work, in which two independent VR studies have been performed. The first VR study was focused on investigating the study goals related to implicit communication concepts, while the second VR study focused on those related to explicit communication concepts. The hypotheses of both VR studies have been chosen in a way to allow investigation of the previously introduced study goals. The experiments for VR study 1 (implicit communication) were carried out in March 2022, while the experiments for VR study 2 (explicit communication) took place in August 2022.
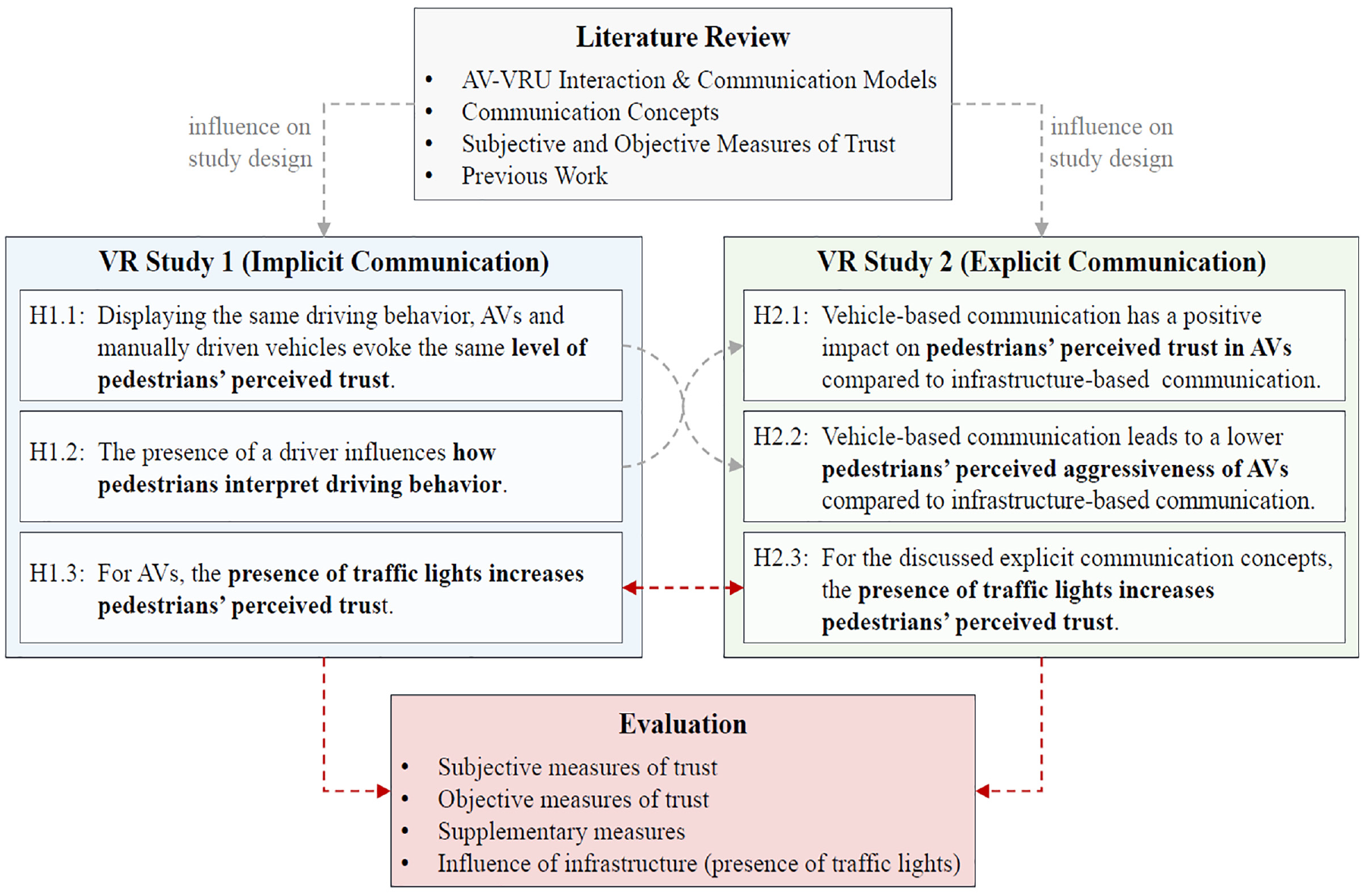
Overall study procedure.
Hypotheses H1.1 and H1.2 of the first VR study are focused on the influence of implicit communication concepts on the difference in pedestrians’ perception of manually driven vehicles and AVs. The level of perceived trust is investigated quantitatively, while the influence of the presence of a driver on how pedestrians interpret driving behavior is investigated qualitatively. Thereby, conclusions can be drawn whether implicit communication concepts of manually driven vehicles can be used as a model to develop implicit AV communication concepts.
Contrary to that, hypotheses H2.1 and H2.2 of the second VR study focused on explicit communication concepts. They are concerned with the investigation of the impact of vehicle- and infrastructure-based explicit communication concepts on pedestrians’ perception of AVs. For this, both the pedestrians’ perceived trust in AVs as well as the pedestrians’ perceived aggressiveness of AVs have been quantitatively assessed for the different discussed explicit communication concepts.
Finally, the influence of traffic infrastructure (presence of traffic lights) on pedestrians’ perceived levels of trust has been investigated with hypotheses H1.3 and H2.3. While H1.3 is concerned with implicit communication of AVs, H2.3 focuses on the discussed vehicle- and infrastructure-based explicit communication concepts.
Specific Study Procedure and Experimental Task
The study procedure of both VR studies was the same for each participant. In a pre-survey, participants were asked to group themselves into pre-defined age categories as well as to state both their experience with VR and with driving automation on a five-point Likert scale (see the section Participants).
In the subsequent familiarization phase, participants were informed about the process of the VR experiment and instructed with respect to their tasks. The following instructions were added to standardize the scenario envisioned by the participants: Imagine that you are late for a job interview and want to cross the road ahead of you sooner rather than later, but please obey the traffic rules. In doing so, please behave as you would in real traffic and do not take any risks that you would not take in real traffic situations.
Participants were not informed about the scenario permutation, which amongst other factors includes the availability of a vehicle driver or the explicit communication concept of the AV. Furthermore, participants were given the chance to get familiar with the VR environment and get used to the idea that they can trust the system.
Once the participants passed the familiarization phase, the actual experiments began. The scenarios were randomly introduced (scenario permutation) according to the independent variables of each specific study (see the section Independent Variables). At the beginning of each scenario, the participant stood at the side of the street they were about to cross on a designated starting spot. Once the participants stated their readiness, the interviewer started the scenario. The scenario ended automatically once the participant stepped on the pavement on the opposite side of the road. In the subsequent interim survey, participants were asked to rate the different sub-categories of their perceived trust with one questions each, before continuing with the next scenario.
A post-survey was included after completing all scenarios, where participants were asked to fill out the simulator sickness questionnaire by Kennedy et al. ( 54 ) to ensure the results were not distorted by cyber-sickness.
Resources and Participants
This section presents the resources available for the conduction of the VR studies as well as an overview of the attributes of their participants.
Resources
The studies were conducted in a 10 m × 12 m room (diagonally 15.5 m) that was cleared to provide the participants with 12 m of free walking space plus an additional 1.5 m buffer on each side. This free walking space is defined as the VR walking environment and becomes visible when a participant approaches the boundary. The VR environment showed the layout of the urban intersection Milbertshofener-/Knorrstraβe in Munich. All vehicles approached from the road opposite to the participant and then turned left into the road the participant was about to cross. Figure 3 shows the free walking space as well as the VR environment.
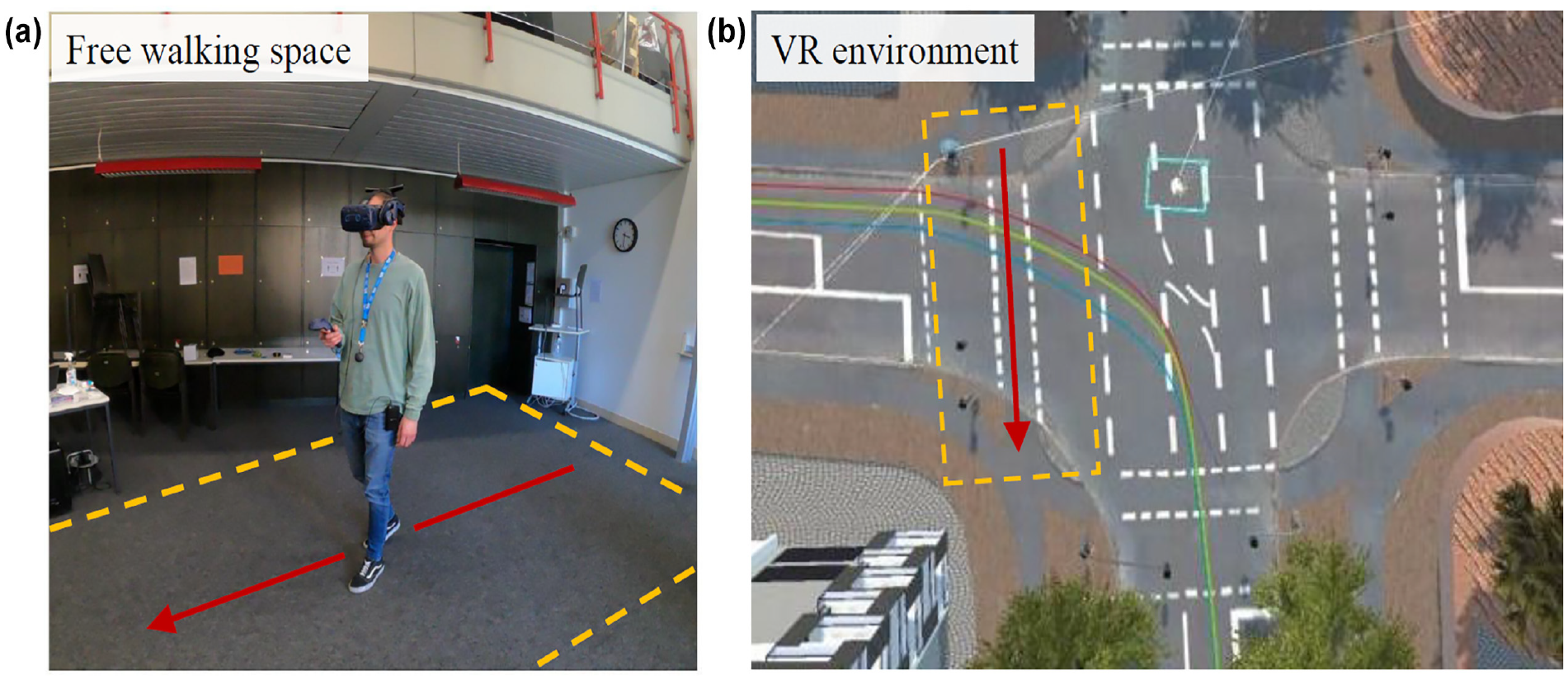
Experimental setup: (a) free walking space and (b) top view of the virtual reality (VR) simulation environment in Unity3D.
The VR environment was realized using an HTC VIVE Pro Headset combined with a VIVE Wireless Adapter and two HTC SteamVR Base Stations 2.0 on either side of the walkable area ( 55 ). The VR setup was created using the Unity3D game engine ( 56 ) with three-dimensional (3D) models created in Blender ( 57 ).
Participants
Figure 4 shows the attributes of the participants, assessed in the pre-survey of the VR studies. The age distribution, experience with VR, and experience with driving automation are depicted.
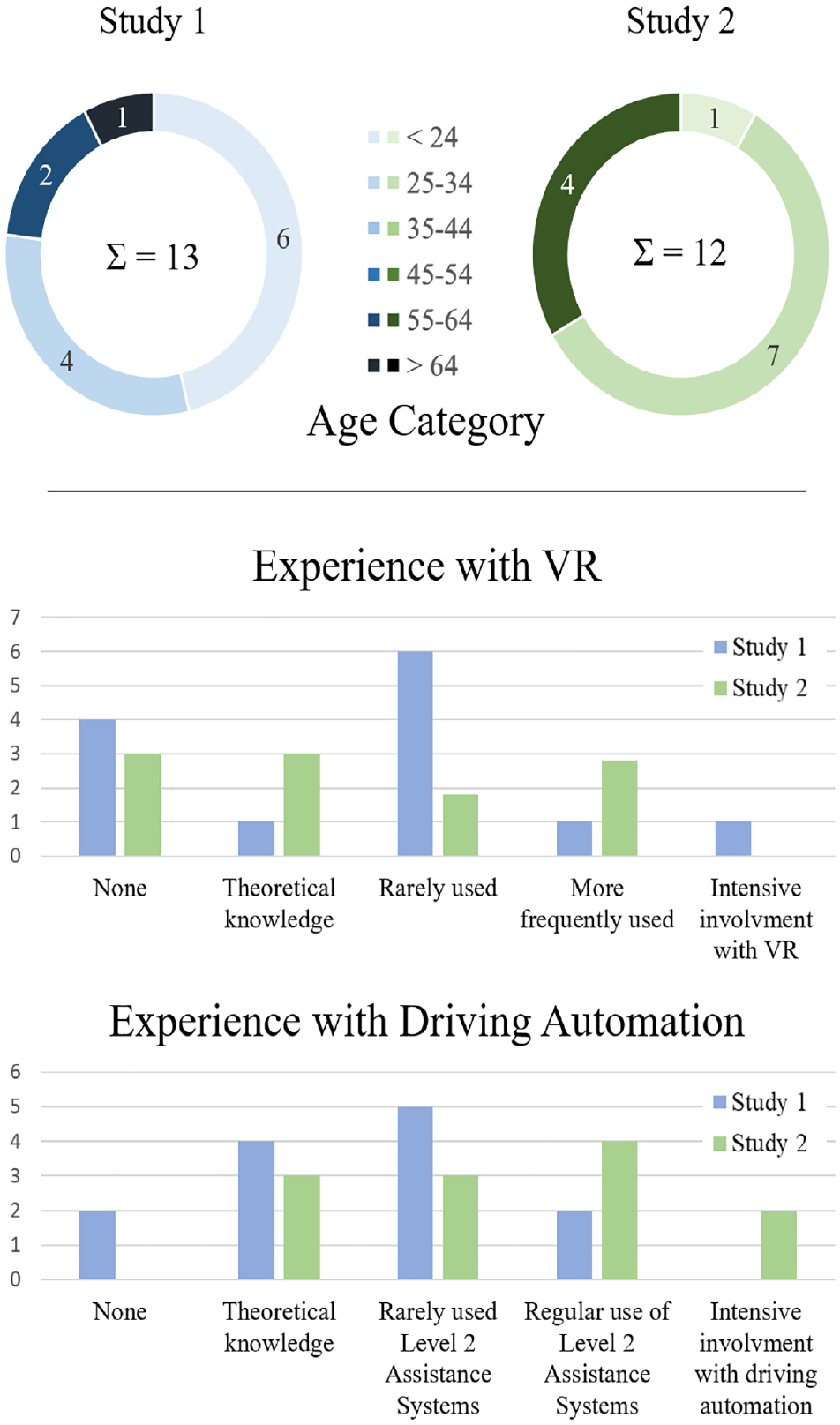
Participants.
In general, the attributes of the participants of both VR studies follow the same trend. While low age categories dominate the age distribution, higher age categories are represented as well. Both studies lack participants between the ages of 35 and 54. For both VR studies, participants had low experience with VR, having just theoretical knowledge or even no knowledge about VR. Few participants stated frequent use of VR or intensive involvement with VR. For the experience with driving automation, slight differences in the participants of the two conducted VR studies can be seen. The participants of the second VR study had slightly more experience with driving automation compared to the participants of the first VR study.
Experimental Design
This section deals with the experimental design of the conducted VR studies. Both the independent and dependent variables are introduced, while similarities and differences between the two studies are highlighted.
Independent Variables
Both studies had a 2 × 3 × 2 factorial design with two of the factors being the same for both studies. These are presence of traffic lights and aggressiveness of vehicle driving style. While the factor presence of traffic lights was divided into the conditions with traffic light and without traffic light, the factor aggressiveness of vehicle driving style was divided into the conditions aggressive, neutral, and defensive. The vehicle dynamics considered for the different driving styles are adopted from the previous work of Jayaraman et al. ( 32 ).
The third independent variable differed for the two conducted VR studies. The first VR study, which was concerned with the investigation of implicit communication concepts, had the factor presence of vehicle driver or state of automation and consisted of two conditions: with driver (manually driven vehicle) and without driver (AV). The second VR study was concerned with the investigation of vehicle- and infrastructure-based explicit communication concepts. The third factor for this VR study was the type of explicit communication concept, consisting of the conditions vehicle-based and infrastructure-based. Figure 5 shows the investigated explicit communication concepts.
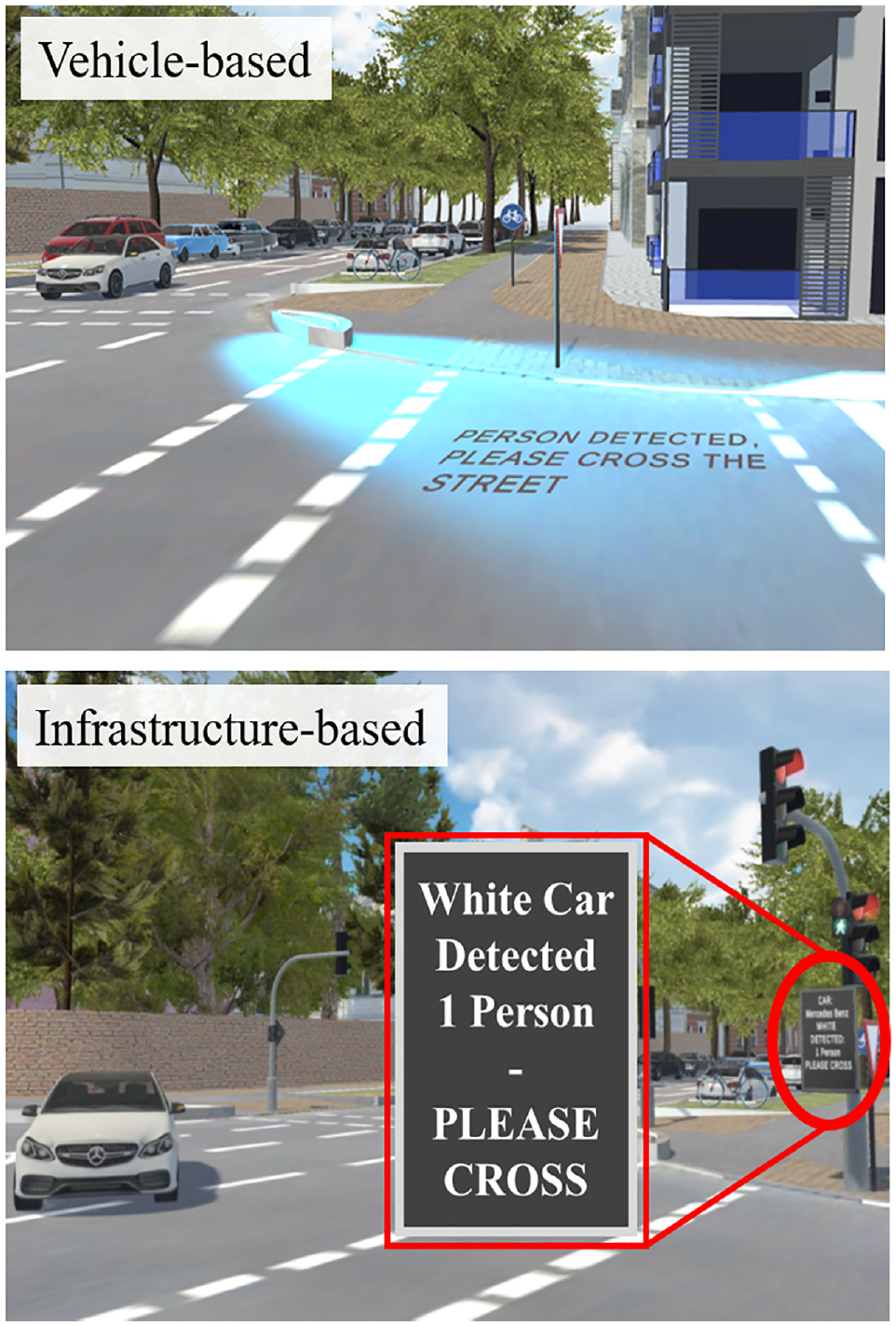
Explicit communication concepts considered for virtual reality (VR) study 2 in the VR simulation environment Unity3D.
For the vehicle-based communication concept, the projection of the text “Person detected, please cross the street!” perpendicular to the participants’ walking direction was chosen. For the infrastructure-based communication concept, a text panel with the flashing text “White car detected 1 Person – Please Cross” on the traffic light pole on the other side of the street was chosen.
Dependent Variables
The evaluation of the results has been performed in a multi-criterial way. On the one hand, subjective measures of trust have been captured through questionnaires that the study participants filled out. To assess the multi-criterial dimension of trust, a questionnaire from Jayaraman et al. ( 32 ), who adapted the trust in automation scale by Muir ( 35 ) to fit the pedestrian–AV interaction context, was used (see the section Measures of Trust). The participants were asked to rate six different statements, each representing one sub-category of perceived trust, on a seven-point Likert scale (from 1 meaning “none” to 7 meaning “extremely high”). The participant’s overall perceived trust is represented by the average of the resulting values of all six sub-categories.
In addition, Mann–Whitney U-tests have been performed for the overall perceived trust scores as well as the six sub-categories to determine the significance of the yielded results and the corresponding hypotheses (see the section Overall Structure and Hypotheses). In all cases, the distributions differed between both investigated samples, making the Mann–Whitney U-test the correct choice for statistical analyses for low sample sizes. For all subsequent statistical analyses, a confidence level of 85% is chosen, which indicates that differences between the compared samples are considered statistically significant if the p-value is below 0.15. We chose this comparably low threshold value to balance the risk of type I errors (false positives), given the exploratory nature of this research. In addition to this, the specific confidence level of certain sub-categories of trust or driving styles will be explicitly stated to highlight observed differences.
The questionnaires for the assessment of perceived trust were followed by a short semi-structured interview on how the participants interpreted the intention behind the specific driving dynamics. The interview was adapted from the semi-structured interview by Pillai ( 21 ) but reduced to the questions that are important to the purpose of this study (see hypothesis H1.2).
Further objective and supplementary measures that have been recorded involved the distance to collision, waiting time, crossing time, and crossing distance.
Results and Discussion
This section discusses the results of the two VR studies. The results are structured in a way that reflects the defined study goals (see the section Study Goals). Firstly, the impact of vehicle automation on pedestrians’ perceived trust for implicit communication concepts is discussed, before the impact of vehicle- and infrastructure-based explicit communication concepts is evaluated. Finally, the impact of infrastructure (presence of a traffic light) on pedestrians’ perceived trust is analyzed.
Impact of Vehicle Automation on Pedestrians’ Perceived Trust for Implicit Communication
The main hypothesis behind the impact of vehicle automation on pedestrians’ perceived trust for implicit communication scenarios states that manually driven vehicles and AVs that display the same driving behavior evoke the same level of trust in participants (see hypothesis H1.1). Figure 6 shows the investigated subjective measure of trust distinguished by driver’s presence. Next to the overall perceived trust, the single sub-categories are depicted as well for further analysis.
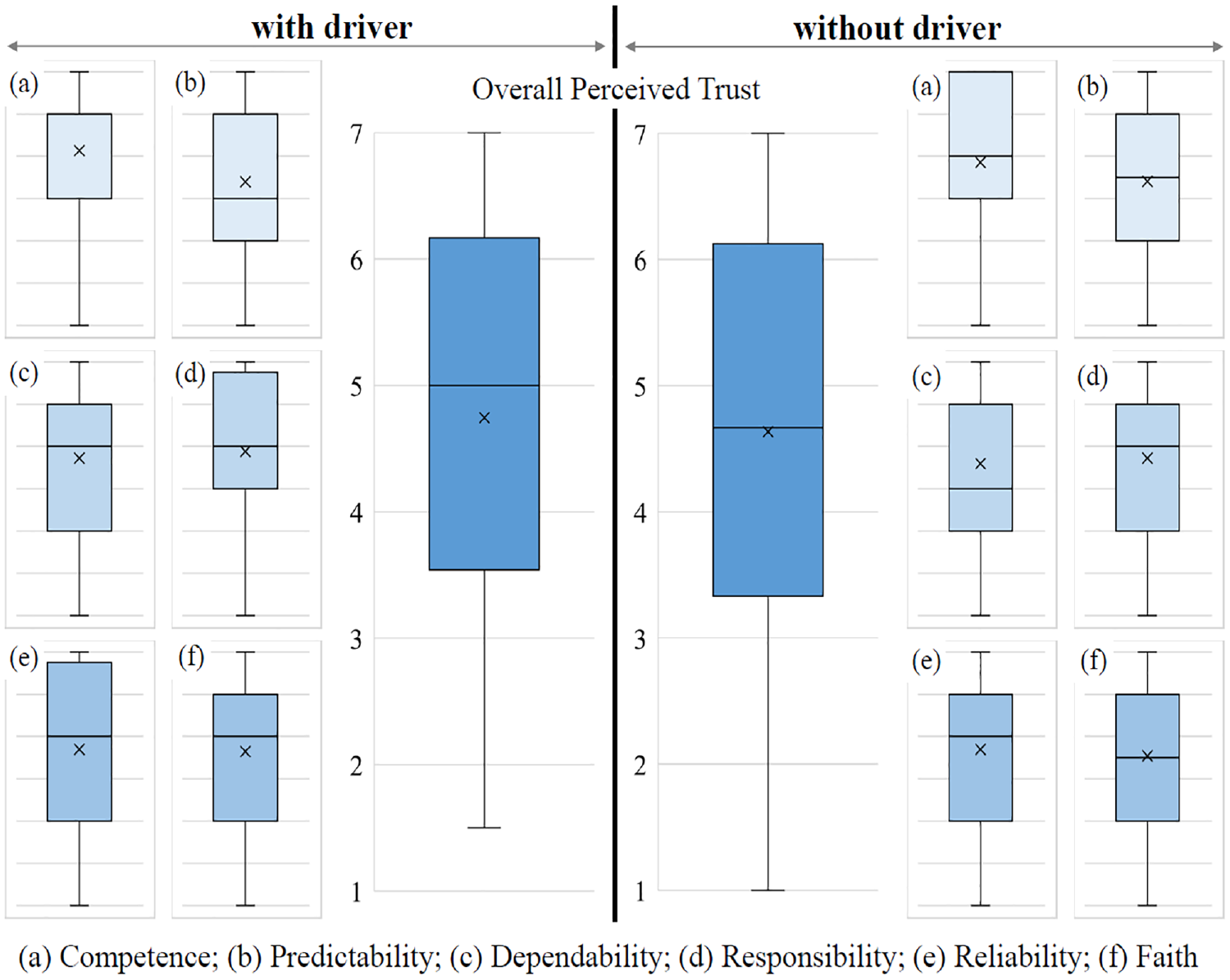
Investigated subjective measures of trust distinguished by driver’s presence.
On a first look, the overall perceived trust scores with driver (mean: M = 4.7, standard deviation: SD = 1.6) and without driver (M = 4.6, SD = 1.6) appear similar. The slightly higher median and narrower range for the scenario with driver follow the same trend of a slightly higher perceived trust level in manually driven vehicles. Further evaluating the difference in the six sub-categories of perceived trust, it can be seen that the reported values for competence and faith are slightly higher for manually driven vehicles, while the other sub-categories do not differ considerably in mean value and range.
Also, the Mann–Whitney U-test shows that the overall perceived trust scores do not differ significantly (U = 600.5, p = 0.366 > 0.15). The same applies to the sub-category faith (U = 593.0, p = 0.317 > 0.15). Therefore, the hypothesis is rejected based on the previously chosen confidence level.
In addition, no considerable differences could be observed with respect to the investigated objective and supplementary measures for either of the investigated scenarios. Similarly, for all further scenarios no significant difference could be observed for the recorded objective and supplementary measures. Therefore, the further presentation of results will neglect the recorded objective and supplementary measures.
A further hypothesis for the evaluation of the impact of vehicle automation on pedestrians’ perceived trust for implicit communication concepts states that the presence of a driver influences how pedestrians interpret driving behavior (see hypothesis H1.2). This hypothesis was tested in a qualitative way through short semi-structured interviews after each scenario, while only statements of participants who stated that they were aware of the presence and absence of the driver were considered. The participant’s statements were analyzed distinguished by the vehicle driving style.
For the defensive vehicle driving style, participants described the human driver to be “very careful” and “not in a hurry.” They assumed him to be “aware of the overall traffic situation” and “aware of other road users around him.” The same defensive driving behaviors in AVs were described by participants as “ uncertain” and “inconsistent.” One participant assumed that the sensors recognized him very early, “potentially too early,” and that it also stopped “extremely early.” Another participant said, “I have no idea what it was trying to do. I would say the programming in the AV broke. It didn’t know what it wanted.”
In the case of neutral driving behavior, the human driver was considered by one participant to be a “confident high-speed driver who drives very often and very much and feels very safe because he was very sure that he could handle the car.” Other participants described the driver as “polite” and to have a “responsible personality” that “abides with road traffic regulations.” They presumed him to have driving experience, saying that “He has been driving for a while in his life.” For the neutral driving style of AVs, one participant said that the AV was “coming quite fast. So it probably didn’t see me at first.” Another participant, however, assumed that the “sensors recognized me early” and that the vehicle stopped early because he was recognized as an “unpredictable human being.” Again, another participant stated that he had the impression that the AV with the neutral driving behavior was more skilled than other AVs before.
Participants described the human driver with the aggressive driving style to be “in a hurry.” One participant specifically stated that “people, who drive like that are in a hurry or want to brag with their car.” For the aggressive AV driving style, participants assumed that the sensors recognized them late. One participant said that “although no one was sitting in it, it behaved humanly, impatiently. But because no one was sitting in it, the behavior was not comprehensible to me. A machine would not behave so impatiently.”
Several times participants used language stereotypically used for humans to describe AV behavior. For example, they stated that the AV “saw” or “perceived” them. Some of them switched to “he” to refer to the vehicle.
The qualitative evaluation of the study results shows that there is a difference in the interpretation of driving behavior distinguished by the presence of a driver for all considered driving styles. In general, the driving behavior of the AV was rated as less confident and safe than the driving behavior of the manually driven vehicle. Considering both the quantitative and qualitative study results, it can be concluded that AV driving behavior evokes similar associations as driving behavior of manually driven vehicles, but is ultimately interpreted differently.
Impact of Vehicle-Based and Infrastructure-Based Explicit Communication Concepts
The impact of vehicle automation on pedestrians’ perceived trust for implicit communication has shown that the perception of the driving behavior of manually driven vehicles and AVs does not differ considerably, while evoking slight differences in the perceived trust levels. Therefore, the impact of vehicle-based and infrastructure-based explicit communication concepts on pedestrians’ perceived trust has been further investigated with two different hypotheses.
Pedestrians’ Perceived Level of Trust
One hypothesis states that vehicle-based communication concepts have a positive impact on pedestrians’ perceived level of trust compared to infrastructure-based communication concepts (see hypothesis H2.1). Figure 7 shows the investigated subjective measures of trust distinguished by explicit communication concept. Next to the overall participant’s perceived trust, the single sub-categories are depicted as well for further analysis.
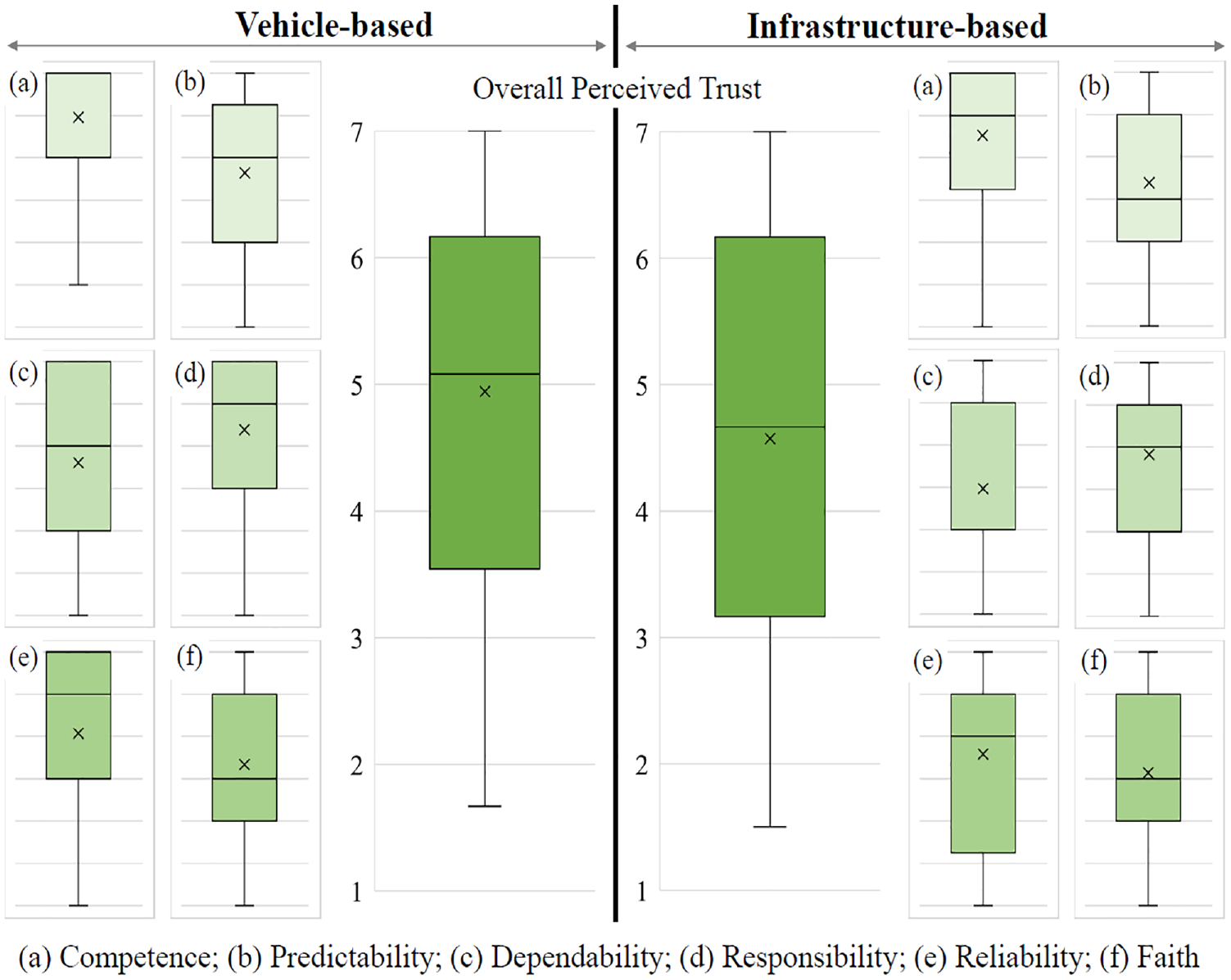
Investigated perceived trust distinguished by explicit communication concept.
The overall perceived trust scores for the vehicle-based communication concept (M = 4.9, SD = 1.5) differ from the reported values for the infrastructure-based communication concept (M = 4.6, SD = 1.6) and support the underlying hypothesis. The range of reported values is higher for the vehicle-based communication concept with the mean, median, and third quartile being considerably higher compared to the infrastructure-based communication concept. Further evaluating the difference in the six sub-categories of perceived trust, it can be seen that the reported values for all sub-categories, except for reliability and faith, are slightly higher for the vehicle-based communication concept.
The Mann–Whitney U-test suggests that the difference in overall perceived trust scores is significant for the chosen confidence level (U = 1012.0, p = 0.109 < 0.15), leading to the acceptance of the hypothesis. Depending on the sub-category, the results deviate from that of the overall perceived trust scores: competence (U = 1067.0, p = 0.181 < 0.15), predictability (U = 1131.5, p = 0.342 > 0.15), dependability (U = 982.5, p = 0.072 < 0.15), and responsibility (U = 949.0, p = 0.044 < 0.15) have been investigated.
Furthermore, the results can be compared to the previous results on pedestrians’ perceived trust in AVs with the implicit communication concept. The overall perceived trust scores of the infrastructure-based communication concept matches those of the implicit communication with slight differences in the distribution of reported values. Further evaluating the difference in the six sub-categories of perceived trust, it can be seen that the reported values for competence are higher for the infrastructure-based system, while the reported values for dependability and faith are higher for the implicit communication concept.
Pedestrians’ Perceived Aggressiveness of AVs
The second hypothesis states that vehicle-based communication concepts have a positive impact on pedestrians’ perceived aggressiveness of AVs compared to infrastructure-based communication concepts (see hypothesis H2.2). Figure 8 shows the participants’ perceived aggressiveness of AVs distinguished by explicit communication concept and driving styles.
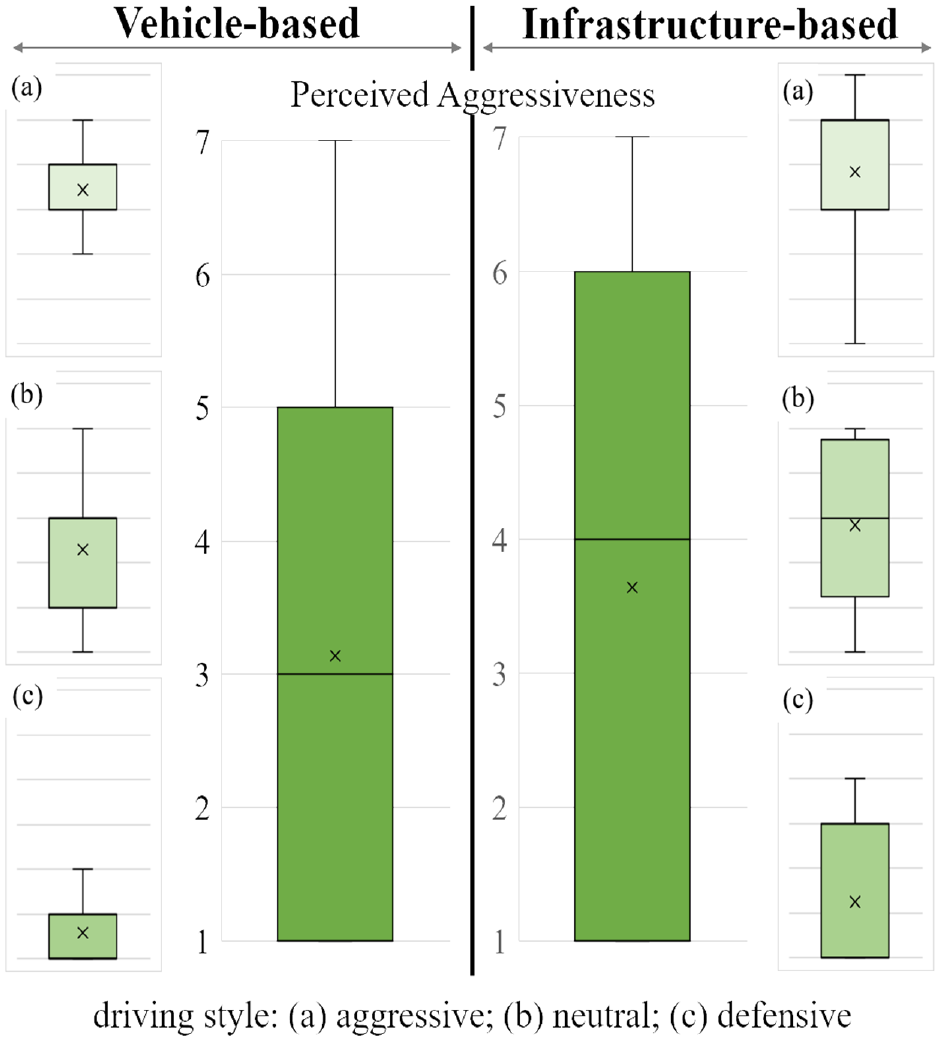
Investigated perceived aggressiveness distinguished by explicit communication concept and driving styles.
The overall perceived aggressiveness for the vehicle-based communication concept (M = 3.1, SD = 1.8) is lower than the reported values for the infrastructure-based communication concept (M = 3.6, SD = 2.0) and supports the underlying hypothesis. Further evaluating the perceived aggressiveness distinguished by driving style, it can be seen that the mean values are lower for the vehicle-based communication concept. Furthermore, for both the aggressive and defensive driving style the maximum reported value is lower for the vehicle-based communication concept.
The Mann–Whitney U-test shows that the overall perceived aggressiveness values differ significantly from each other for the investigated explicit communication concepts for the chosen confidence level (U = 1481.0, p = 0.110 < 0.15). Differentiated by driving style, it can be seen that the confidence level is considerably higher, with about 91.0% for the aggressive driving style (U = 176.0, p = 0.089 < 0.15) compared to the neutral (U = 155.5, p = 0.202 > 0.15) and defensive driving styles (U = 163.5, p = 0.233 > 0.15), with both confidence levels <80.0%.
Impact of Infrastructure (Presence of Traffic Lights) on Pedestrians’ Perceived Trust
This section discusses the impact of infrastructure (presence of traffic lights) on pedestrians’ perceived trust. Both conducted VR studies considered this topic with an own hypothesis.
Implicit Communication Concepts
The hypothesis for implicit communication concepts states that for AVs, the presence of traffic lights increases pedestrians’ perceived trust (see hypothesis H1.3). Figure 9 shows the participants’ perceived level of trust distinguished by the presence of traffic lights and driving styles for implicit communication.

Investigated perceived level of trust distinguished by presence of traffic lights and driving styles.
The overall perceived trust scores for the scenario with traffic lights (M = 4.8, SD = 1.5) are higher than for the scenario without traffic lights (M = 4.4, SD = 1.6) and support the underlying hypothesis. The minimum value, median, and third quartile are considerably higher for the scenario with traffic lights. Further evaluating the pedestrians’ perceived trust distinguished by driving style, it can be seen that the overall perceived trust for the neutral driving style appears similar. For the aggressive driving style, the mean value is similar, while the minimum value and first quartile are considerably higher for the scenario with traffic lights. Comparing the perceived trust for the defensive driving style, it can be seen that the mean value as well as the minimum value are considerably higher for the scenario with traffic lights.
The Mann–Whitney U-test shows that for the chosen confidence level, the overall perceived trust scores differ significantly from each other for the investigated explicit communication concepts (U = 619.0, p = 0.144 < 0.15). Investigating the confidence level differentiated by driving style, it can be seen that the aggressive (U = 87.5, p = 0.571) and neutral (U = 78.5, p = 0.522) driving styles yield confidence levels of <50.0%. For the defensive driving style, on the other hand, the results show a high confidence level of about 98.0% (U = 39.5, p = 0.019 < 0.15).
Explicit Communication Concepts
The hypothesis for explicit communication concepts states that for both vehicle- and infrastructure-based communication concepts, the presence of traffic lights increases pedestrians’ perceived trust (see hypothesis H2.3). Figure 10 shows the participants’ perceived level of trust distinguished by the presence of traffic lights and driving styles for the discussed explicit communication concepts.
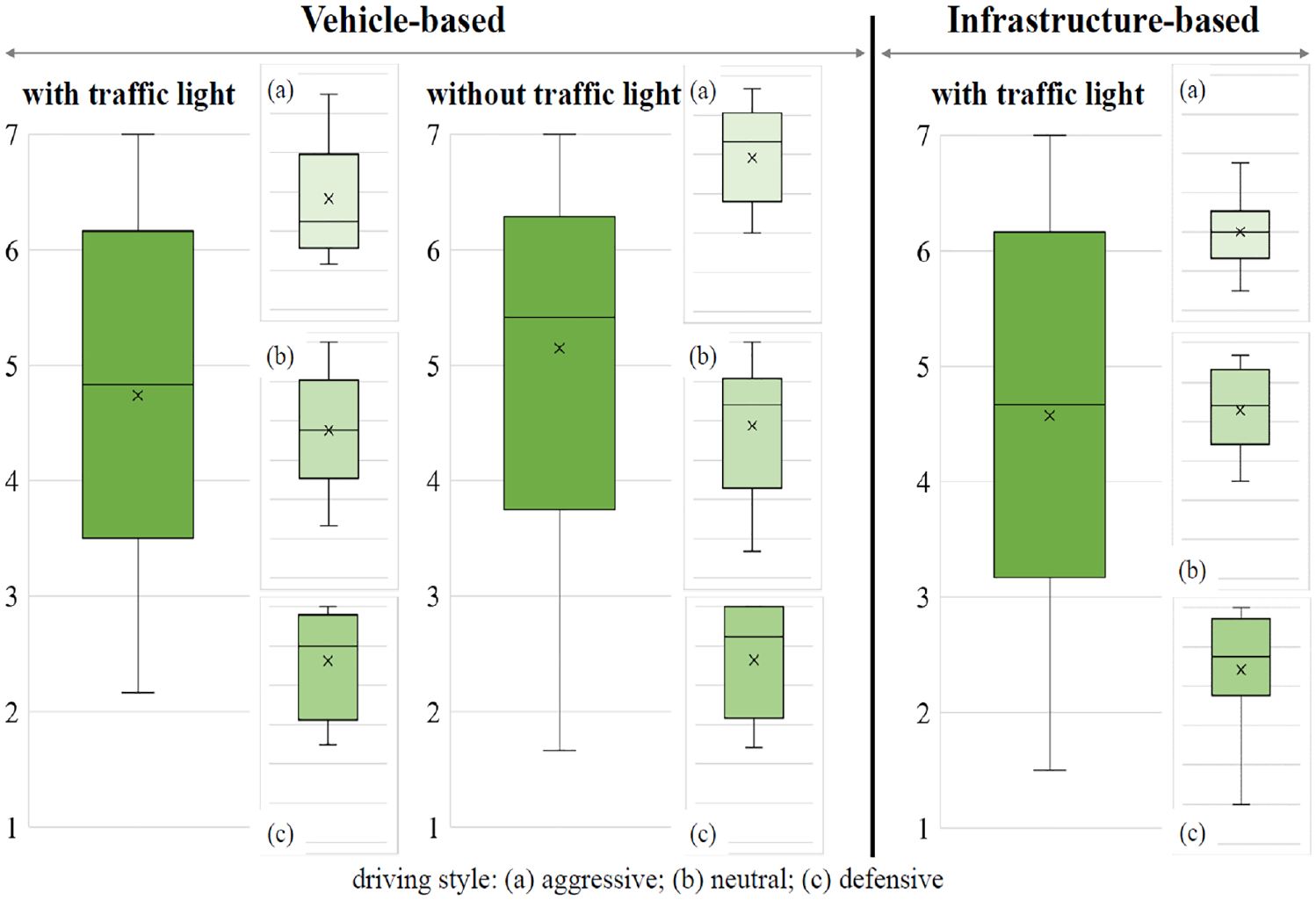
Investigated perceived level of trust distinguished by presence of traffic lights and driving styles for the discussed explicit communication concepts.
The overall perceived trust scores for the vehicle-based communication concept with traffic lights (M = 4.7, SD = 1.5) are lower than for the scenario without traffic lights (M = 5.1, SD = 1.4).
The Mann–Whitney U-test shows that for the chosen confidence level, the overall perceived trust scores differ significantly from each other for the investigated explicit communication concepts (U = 747.0, p = 0.133 < 0.15). Investigating the confidence level differentiated by driving style, it can be seen that the neutral (U = 78.0, p = 0.375) and defensive (U = 79.5, p = 0.342) driving styles yield confidence levels of <65.0%. For the aggressive driving style, on the other hand, the results show a high confidence level of about 97.0% (U = 104.5, p = 0.032).
Furthermore, the perceived trust score for the infrastructure-based communication concept with traffic lights (M = 4.6, SD = 1.6) is also lower than the scenario without traffic lights and similar to the vehicle-based scenario with traffic lights.
The Mann–Whitney U-test shows that for the chosen confidence level, the overall perceived trust scores differ significantly from each other for the investigated explicit communication concepts (U = 249.5, p = 0.087 < 0.15). Investigating the confidence level differentiated by driving style, it can be seen that the neutral driving style yields confidence levels of <24.5% (U = 83.5, p = 0.756), while for the defensive driving style the confidence level reaches about 67.0% (U = 64.0, p = 0.331). For the aggressive driving style, on the other hand, the results show a high confidence level of about 99.9% (U = 17.5, p = 0.001 < 0.15).
Thus, the underlying hypothesis is accepted only for the aggressive driving style since the presence of traffic lights did not increase pedestrians’ perceived trust for the other investigated driving styles significantly.
In addition, some study participants expressed that the simultaneous consideration of multiple visual aids, that are not always within the same field of view (e.g., because of moving vehicle), evoked “some insecurity” and “the feeling of missing information.”
Furthermore, the results can be compared to the previous results on pedestrians’ perceived trust in AVs with the implicit communication concept. For all scenarios (implicit communication as well as vehicle- and infrastructure-based explicit communication) with traffic lights, the overall perceived trust scores are similar with slight differences in mean, median, and minimum values.
Conclusion
This section concludes this study with an interpretation of results, a discussion of its limitations, and an outlook to future work.
Interpretation of Results
The results show that the presence of a driver has a negligible impact on the perceived trust scores of pedestrians (with driver: 4.7, without driver: 4.6), while an influence on how pedestrians interpret driving behavior could be observed in a quantitative way though semi-structured interviews with the participants after each scenario. It can be concluded from the results that AV driving behavior evokes similar associations as driving behavior of manually driven vehicles, but is ultimately interpreted differently. Taking this into consideration, it has to be emphasized that the driving behavior of manually driven vehicles cannot be comprehensively used as model for AV driving behavior. Nevertheless, in the future the findings of this study can be considered in the development of models for AV driving behavior to incorporate the social interaction void that arises between AVs and pedestrians in even further detail.
Furthermore, an increase in the perceived trust with a mean perceived trust score of 4.9 has been observed for the investigated vehicle-based explicit communication concept compared to both the investigated infrastructure-based communication concept (with a mean perceived trust score of 4.6) and implicit communication (with driver: 4.7, without driver: 4.6). In addition, a reduced perceived aggressiveness has been observed for the vehicle-based communication concept (with a mean perceived aggressiveness score of 3.1) compared to the infrastructure-based communication concept. Furthermore, similar trust scores have been investigated for the infrastructure-based communication concept and the implicit communication (with a mean perceived aggressiveness score of 3.6). From the results it can be concluded that the investigated vehicle-based communication concept (LED projection) might have a positive impact on the perceived trust of pedestrians when interacting with AVs in crossing situations at intersections. Since the effectiveness of eHMI concepts has been shown to depend on factors such as the design of the interface, the context of use, and the cultural background of the road users involved, further investigations will be necessary to evaluate the impact of vehicle- and infrastructure-based AV communication concepts.
The impact of the traffic infrastructure (presence of traffic lights) on pedestrians’ perceived trust has shown different results for implicit and explicit communication of AVs. In the case of implicit communication, it has been observed that the presence of a traffic light leads to higher perceived trust scores, with a mean value of 4.8, compared to overall perceived trust scores, with a mean value of 4.4, for scenarios without traffic lights, while for explicit communication, the presence of a traffic light leads to lower perceived trust scores (vehicle-based explicit communication: 4.7, infrastructure-based explicit communication: 4.6) compared to overall perceived trust scores, with a mean value of 5.1 for scenarios without traffic lights. In the case of explicit communication, some study participants expressed a potential cognitive overload caused by the perception of multiple visual aids that are not always within the same field of view. Therefore, the underlying hypothesis that the presence of traffic lights has a positive impact on pedestrians’ perceived trust when interacting with AVs is rejected for the scenario with explicit communication.
Limitations
A major drawback of both VR studies is the limited sample size. For more reliable results, more study participants are necessary. This influences especially the significance of the results, as shown through the performed significance tests and the relatively low confidence level of 85%. To further increase the validity of interpretation of the yielded results, we recommend additional statistical analyses for future studies to proof the statistical evidence of an observed effect. The participants in the studies were mainly from younger age groups. Thus, the composition of the participant collective is not representative. In addition, the use of an between-subject design with small sample size for the two VR studies negatively affects the validity of the results. The characteristics of the participants examined in the pre-survey of the VR studies follow the same pattern (see the section Participants), ensuring a certain degree of comparability between the two participant pools.
Another limitation is that only two explicit communication concepts are used. In the literature, a wide range of concepts is described. The findings of this paper might be difficult to transfer to other concepts and are therefore only valid for the specific ones discussed in this paper. One criticism about this type of study is that only one-to-one interaction is investigated ( 58 ). In urban traffic, very often this is not the case. Future studies must investigate how the discussed implicit and explicit communication concepts are perceived with multiple road users in a scenario. A central issue with multiple road users in a scenario is addressing the information to the right person.
Besides limitations of study design, the topic of simulator validity must be discussed. Simulator studies are considered to be a safe and cost-efficient environment to test and reproduce traffic scenarios with human road users. A general criticism, especially when it comes to assessing safety parameters, is that the presence in the simulation and, therefore, the perceived endangerment, is not the same as in non-simulator environments. The initial benefit of safety is, therefore, also a downside ( 59 ). Most simulators fulfill the requirements for relative (behavioral) validity ( 60 ). This means the tendency toward an action (e.g., accelerating) is the same as in the real world. Absolute validity, which means the absolute value of a parameter (e.g., acceleration value) is the same as in the real world, cannot be assumed. In this simulator study, we examine, besides other research questions, pedestrians’ perceived trust. The validity of the absolute trust values of the Likert scale must not be considered valid, whereas the comparison of different communication concepts has a sufficient (relative) validity level.
Future Work
Future studies should investigate the communication concepts in controlled test field experiments, not in a simulator environment. Thus, the reproducibility of the results is still given, but with the following main benefits: higher subjective safety and trust validity and natural lighting conditions. As discussed in the Limitations section, usually, the feeling of presence in simulators is only sufficient to investigate research questions, including trust and subjective safety, with limited validity. In a test field environment with an actual vehicle, the perceived risk when making a mistake is much closer to that in real traffic. In this paper, human–machine interfaces (HMIs) for explicit communication are described as highly reliant on good lighting conditions. For example, the quality and readability of the projection on the road with direct sunlight might vary significantly according to the simulation’s lighting condition. Besides conducting the study on a test field, a comparison of multiple HMIs should be studied to be able to better distinguish the HMI types (vehicle-based or infrastructure-based) and not the specific HMI designs.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: M. Ilic, M. Vollmer, J. Lindner; data collection: M. Vollmer, J. Lindner, M. Ilic; analysis and interpretation of results: M. Ilic, M. Vollmer, J. Lindner; draft manuscript preparation: M. Ilic, J. Lindner, K. Bogenberger. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work has been carried out as part of the MCube research project, which is funded by the German Federal Ministry of Education and Research (Funding ID: 03ZU1105BA).