
Abstract
Traffic at larger or busier urban intersections is currently coordinated using traffic signals to prevent dangerous traffic situations and to regulate the flow of traffic. In future scenarios with 100% connected automated vehicles, conventional traffic signals could be replaced, and vehicles at intersections could be seamlessly coordinated via vehicle-to-vehicle and vehicle-to-infrastructure communication. In the past two decades, many such control strategies have been presented, commonly referred to as autonomous intersection management (AIM). In recent years, an evolution from simpler first come, first served to more sophisticated optimization-based AIM strategies can be observed. Optimization-based AIM can significantly improve capacity and reduce delays as compared to slot-based strategies and conventional traffic signal control (TSC). In addition, it allows for prioritizing road users. This paper is among the first to consider pedestrians in optimization-based AIM. The proposed approach consists of a signal-free vehicle control in combination with pedestrian signal phases that are fully integrated into the optimization problem. Since the communication range of the controller is limited in real-world applications, a rolling horizon scheme is presented and explained in detail. The presented strategy is implemented and evaluated using a microscopic traffic simulation framework. Results show that vehicle delays can be significantly reduced and vehicle capacity can be increased compared to fully actuated TSC, while pedestrian waiting times are comparable. In addition, focus is put on how vehicle and pedestrian delays can be balanced in the presented setup. Three different control parameters can be adjusted, which need to be tuned based on the considered demand scenario.
Keywords
Transportation plays a major role in people’s everyday lives. Ever-increasing vehicle miles traveled coincide with a growing awareness with respect to the negative impacts of motorized traffic—especially in urban areas. Because of congestion, in more than 200 cities worldwide an average vehicle trip takes 25% more time than in free-flow conditions ( 1 ). In addition, many cities have to cope with high levels of air pollution, and motorized traffic in cities imposes a risk on pedestrians and bicyclists ( 2 ). Conflicts predominantly occur at intersection zones, which are the bottlenecks of urban transportation networks. At the same time, new and fast advancing technologies offer several potential solutions that can be combined to mitigate these problems. Automated vehicles (AVs) will be capable of sensing their environments and navigating different traffic conditions with little or no input from the passenger. Connected automated vehicles (CAVs) will additionally be able to communicate with other vehicles and the infrastructure, which makes it possible to coordinate their movements more efficiently. CAVs are thus expected to have positive effects on fuel efficiency, congestion reduction, and road safety. This especially applies for intersection zones, where vehicle movements could be orchestrated to improve both safety and efficiency. While traffic at larger or busier urban intersections is currently coordinated using traffic signals to prevent dangerous traffic situations and to regulate the flow of traffic, costly implementation of physical traffic signals might no longer be necessary if all vehicles are connected and automated. With increasing progress in vehicular communication and automation, signal-free intersections have been presented as a possible future vision. In so-called autonomous intersection management (AIM) concepts, vehicles communicate with each other or with infrastructure that is installed at the intersection zone, and reserve a specific time slot or trajectory for crossing the intersection zone safely. The concept promises both safety and efficiency benefits that go beyond traditional traffic signal control (TSC) optimization ( 3 ). However, this only generally holds true if proper optimization techniques are applied to distribute space–time to different road users. Simple rule-based approaches have been shown to improve vehicle delays in undersaturated conditions but at the same time reduce the capacity at larger intersection zones ( 4 , 5 ).
Even though signalized intersections predominantly exist in multimodal urban environments, most AIM studies focus on vehicle-only traffic and do not consider pedestrians or bicyclists at the intersection. In previous papers, authors have proposed new integrated intersection control strategies that featured the demand-responsive integration of signal green phases for pedestrians into rule-based AIM ( 6 , 7 ). This paper extends these studies by (i) applying a more flexible intersection modeling approach, (ii) significantly reducing delays by applying optimization, and (iii) demonstrating how parameter settings can be used to balance vehicle and pedestrian delays. The research is a part of the PhD thesis by Niels ( 8 ). The paper is structured as follows: the second section presents related literature; the third section explains the applied optimization problem; the fourth section describes the simulation setup; the fifth section discusses the obtained results; and the sixth section concludes the study and gives an outlook on future research topics.
Related Work
The first notable work on AIM was presented by Dresner and Stone ( 9 , 10 ). They presented a multi-agent approach where vehicle agents communicate with an intersection agent to exclusively reserve discrete areas of the intersection zone. Motivated by the promising results and the continuous development in CAV technology, many studies by scholars from all over the world followed. Several recent surveys ( 11 – 14 ) give an overview about the considerable literature in the field. The most important AIM components and typical characteristics are briefly summarized in the following.
Traffic Coordination
Traffic coordination includes the detection and adaptation of conflicting vehicle movements. The traffic coordination at an intersection zone can either be organized with the help of a central controller, or in a cooperative manner, where vehicles communicate with each other and follow a protocol without the need for a central coordination unit. As there is no single point of failure, decentralized AIM is considered to be more robust. On the other hand, it also requires more communication effort to ensure information consistency, and reaching a global objective is more difficult ( 11 , 12 ). If human drivers, pedestrians, or bicyclists are considered as well, then a central controller is typically assumed, since there is no clear communication protocol with human road users ( 6 , 7 , 15–18).
Intersection Modeling
To identify conflicts between different road user movements, an intersection model is needed. With the exception of very few recent studies (e.g., Li et al. [ 19 ]), it is assumed that each vehicle follows a predefined path through the intersection that is determined by entrance and exit lanes. To resolve conflicts, the AIM needs to detect vehicle paths that overlap or cross each other and ensure sufficient time gaps between each two vehicles. A common approach when modeling AIM is to first discretize the space of the intersection zone, that is, to divide it into a set of pairwise disjoint cells. Each vehicle passes a subset of these discrete zones in a given order. Now, conflicts can be avoided by limiting the occupancy of each cell to one vehicle at a time ( 9 , 10 ). A larger number of cells increases the accuracy of the considered reservations and can improve the efficiency of the control, but also increases the complexity of the calculation ( 20 , 21 ). Zhu and Ukkusuri ( 22 ) propose to instead generate a matrix that indicates whether two paths intersect and includes the exact distances between conflict points. Then, two vehicles with conflicting movements are allowed in the intersection zone at the same time if sufficient spacing between these two vehicles at their conflict point can be guaranteed ( 17 , 22 , 23 ).
Scheduling Policy
The scheduling policy describes how the order and arrival times of vehicles entering the intersection zone are determined. One of the most widely used concepts is the first come, first served (FCFS) strategy, also known as first in, first out. As the name suggests, it processes requests of approaching vehicles in the order of their receipt. FCFS is easy to implement and can provide an immediate response for the vehicle that has requested passage. However, FCFS schemes can be inefficient, as they do not take advantage of the knowledge the system has about arriving vehicles. Levin et al. ( 4 ) found several situations in which traditional traffic signals outperformed the FCFS approach. In addition, the strict paradigm of FCFS does not allow for prioritization of vehicles. Several rule-based extensions have been proposed to overcome these issues, for example, by applying auctions ( 24 , 25 ) or considering platoons as one entity ( 26 ). To further improve the efficiency and flexibility of AIM, optimization-based scheduling policies have been presented. They are usually formulated as mixed-integer linear programs (MILPs) with the objective of minimizing the sum over all vehicle delays ( 23 , 27 , 28 ). Yu et al. ( 5 ) show that optimization-based AIM significantly outperforms FCFS schemes.
Integration of Pedestrians into AIM
While the AIM approaches presented in the literature so far could lead to a more efficient use of intersection space in the future, the continuous vehicle movement infringes pedestrian and bicyclist possibilities to cross the intersection. This is a major difference to traditional TSC, which grants the right-of-way in an alternating fashion. Even though the focus of signal timing often lies on vehicle traffic, the phase-based principle of traffic signals allows pedestrians to cross the intersection together with parallel vehicle movements. In contrast, AIM approaches are vehicle-based, that is, each vehicle is given the right-of-way individually on request. If no space–time is requested by or on behalf of pedestrians, there will be no green phase that they can be appended to. Therefore, they need to be considered explicitly in the reservation process. Nevertheless, pedestrians have been considered in very few studies on AIM so far.
An overview on AIM studies featuring the integration of pedestrians is shown in Table 1. Pedestrian integration is especially challenging because pedestrians are currently not connected to other road users or the infrastructure, and therefore their speeds and desired destinations are not easily predictable. These issues have been discussed in detail by Niels et al. ( 6 , 7 ) and new rule-based control strategies have been proposed. To provide a safe, practical, and user-friendly system, the considered intersections were equipped with infrastructure to detect pedestrians and show them when they are given the right-of-way. The presented results were very promising, but the disadvantages of FCFS-based control were apparent when considering large vehicle and pedestrian demand. Both Chen et al. ( 16 ) and Wang et al. ( 17 ) describe the integration of pedestrian right-of-way into optimization-based AIM. However, the studies do not include pedestrians in the simulation or provide limited results that, because of restrictive assumptions, do not allow for a comprehensive comparison with state-of-the-art TSC. In addition, the presented MILP formulations can be adapted with weighting factors ( 16 , 23 ), which to the best of our knowledge has not been explored as a means to balance road user delays yet.
Literature on the Integration of Pedestrians into Autonomous Intersection Management (AIM)
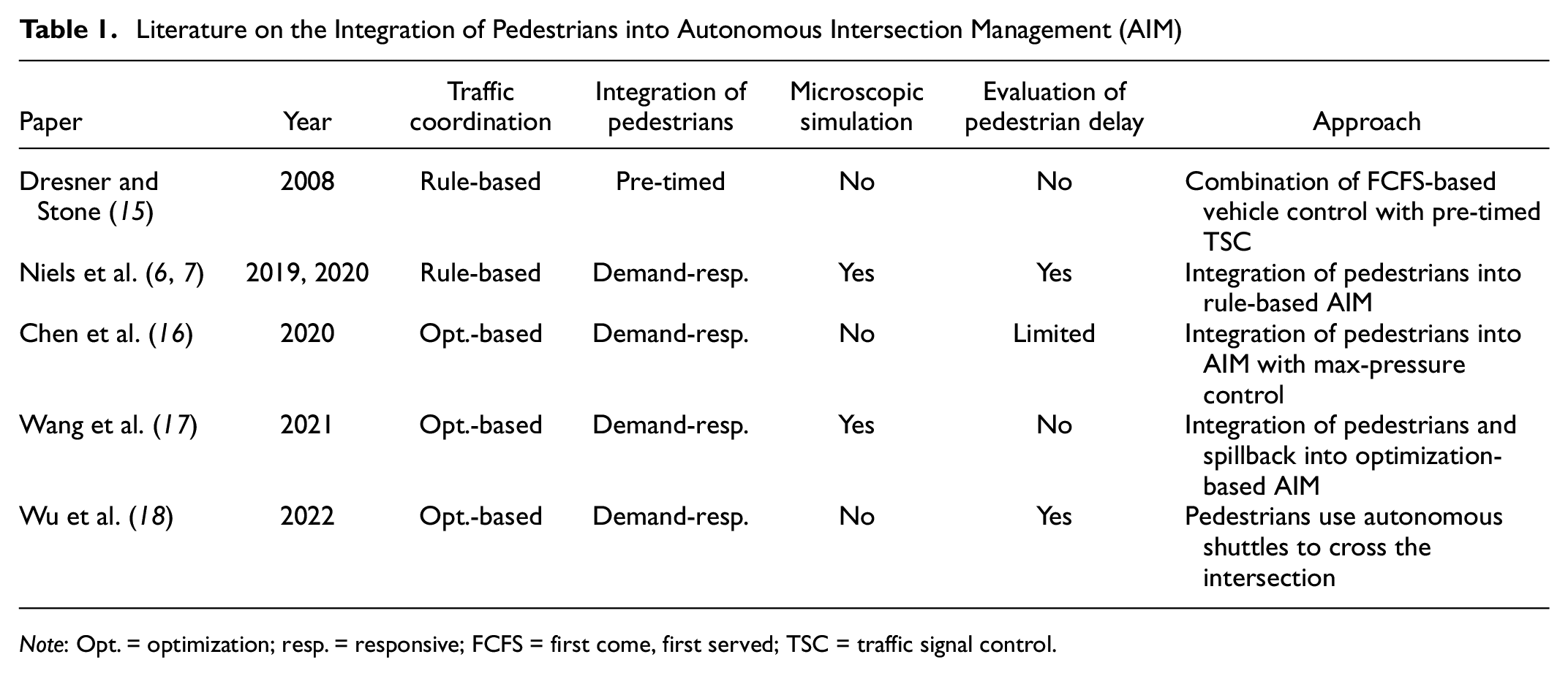
Note: Opt. = optimization; resp. = responsive; FCFS = first come, first served; TSC = traffic signal control.
Contributions of this Study
This paper provides a detailed evaluation on how vehicle and pedestrian delays can be balanced in optimization-based AIM. To account for practical constraints, such as limited communication distances and pedestrians not being equipped with connected devices, a rolling horizon approach is presented and explained in detail. The approach is implemented and evaluated using a microsimulation platform, and a direct comparison to fully actuated TSC is provided.
Methodology
This section presents the intersection control applied in this paper. It follows the same structure as the previous one with a focus on the consideration of pedestrians in each of the components.
Traffic Coordination
As displayed in Figure 1a, the control scheme presented in this paper consists of a central controller that schedules all arriving road users while trajectories are planned by vehicles. Pedestrians are assumed to behave “naturally,” that is, no trajectories are planned for them, but they react to the pedestrian signals that can look and work like today and serve as a human–machine interface.
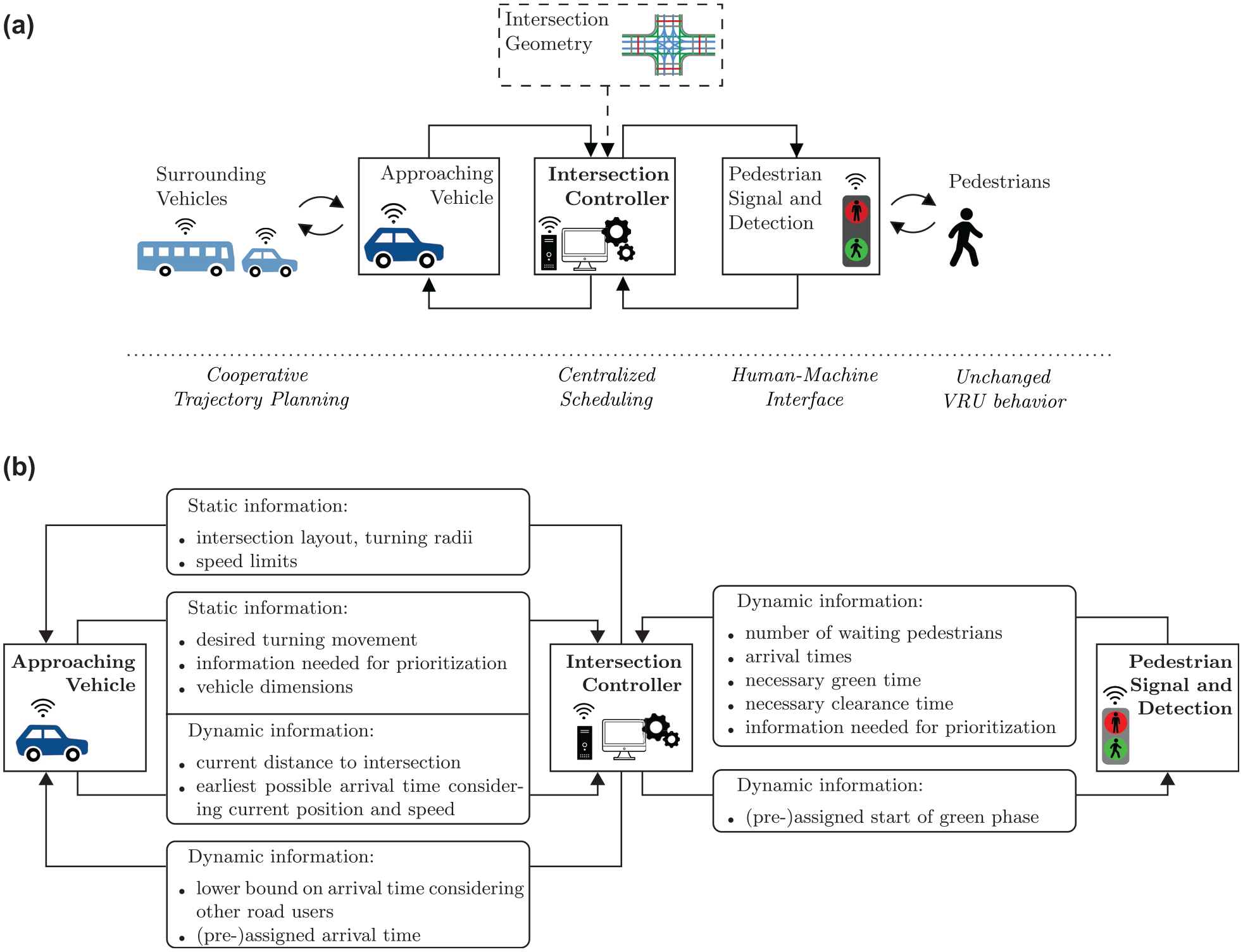
Overall control architecture and communication setup: (a) control architecture of the proposed autonomous intersection management scheme and (b) communication among the intersection controller, vehicles, and pedestrian infrastructure.
Approaching vehicles communicate directly with the intersection control; the exchanged information is displayed in Figure 1b. The intersection controller first provides the approaching vehicles with the static information needed to plan their trajectory, such as the exact geographic position of the entrance to the intersection zone and relevant speed limits. With this information, vehicles can derive their earliest possible arrival time at the entrance to the intersection depending on the current position and speed. This information is needed to assign a feasible time slot for the vehicle and to calculate the vehicle’s delay. To simplify the control, it is assumed that all vehicles cross the intersection at the same constant speed. On the approach to the intersection, each vehicle keeps the controller updated about whether the earliest possible arrival time at the intersection has changed. It has to be noted that this arrival time is an ego perspective of the vehicle without considering other road users. On the other hand, the intersection control entity returns to the vehicle a lower bound on its scheduled arrival time that considers other previously scheduled road users. If the vehicle arrival time has been fixed, the assigned arrival time is sent to the vehicle. The vehicle adjusts its speed on the approach to the intersection zone individually while making sure that it arrives at the intersection zone with the predefined speed.
Pedestrians are assigned to signal phases and assumed to cross the intersection together when given the right-of-way. This setup aims at not forcing pedestrians to have to adapt their current behavior in the futuristic setup. In particular, they are not required to wear connected devices. To fully integrate pedestrian signal activation into the optimization problem, pedestrians are detected when they arrive at the crosswalk. The intersection controller continuously receives information about waiting pedestrians, necessary green times, clearance times, and information that is needed for prioritization. The communication between the intersection controller and pedestrian infrastructure is also displayed in Figure 1b.
Intersection Modeling
This study applies a conflict point-based approach that facilitates the integration of heterogeneous vehicle dimensions and the transferability to other intersection layouts. As described in the second section, all road users are assumed to roughly travel through the intersection along predefined paths. With these paths, conflict points among merging, diverging, and crossing movements can be determined. Figure 2a shows the intersection considered in this paper. It presents all allowed paths for vehicles (blue) and pedestrians (red), and displays conflict points for selected movements. For reasons of simplicity, the intersection does not feature the diagonal crossing of pedestrians. Bicycle movements are shown in the figure (green), but their consideration will be left for future analyses.
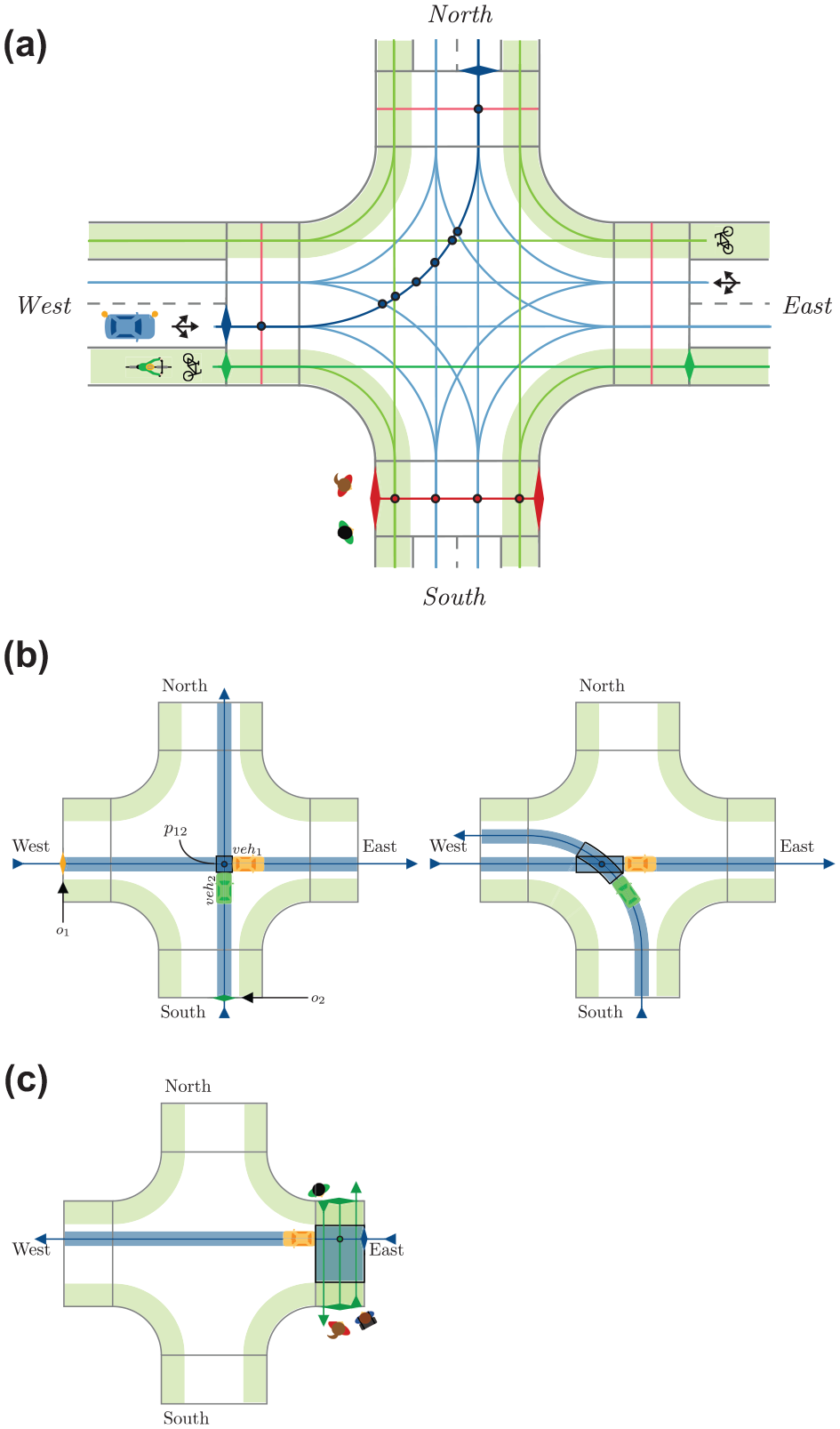
Considered intersection layout and example conflict points and regions: (a) considered intersection zone with paths and conflict points of different road users, (b) conflict regions of different vehicle–vehicle conflicts, and (c) example conflict region of vehicle–pedestrian conflict (color online only).
The conflicts between different road users do not only have to be resolved at the one-dimensional points shown in Figure 2a, but each two conflicting movements span a conflict area. Examples of vehicle–vehicle conflict areas are shown in Figure 2b. It is easy to see that the size of the conflict region depends on how the vehicle paths overlap. Therefore, they are spanned dynamically with information on vehicles’ origins and destinations. Figure 2c shows a vehicle–pedestrian conflict region. From the vehicle perspective, the conflict region includes the entire width of the pedestrian crosswalk; from the pedestrian perspective, it includes the entire width of the vehicle road. To resolve conflicts, only one vehicle or a group of pedestrians is allowed within the spanned conflict region at a time. Vehicle arrival times and start times of pedestrian green phases are determined such that the second road user only enters the conflict region after the first road user has left and a sufficient time gap
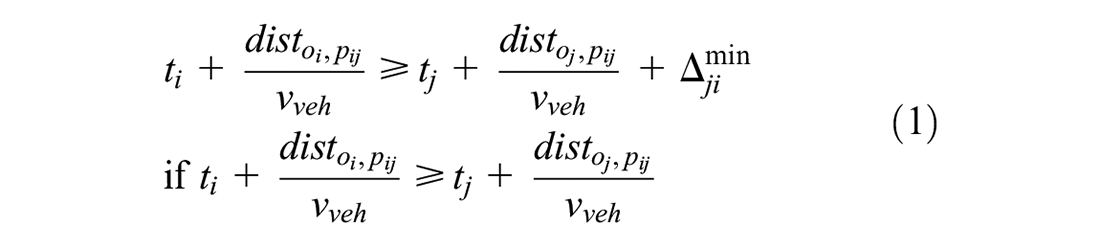
or:
depending on which vehicle passes the conflict point first.
A similar approach applies for conflicts with vehicles and pedestrians. The difference is that pedestrian speeds are not known beforehand, and pedestrians crossing the same leg are supposed to cross the intersection zone roughly at the same time, that is, when their respective signal head turns green. Based on this assumption, it does not make sense to consider each individual pedestrian separately, but space is instead reserved for signal phases. Let
Otherwise, the constraint is formulated as follows:
where
Scheduling Policy
The scheduling policy is the center of the intersection control. It combines all relevant information and applies optimization techniques to achieve the objective of providing a safe and efficient schedule for road users to cross the intersection. As described above, the decision variables will be the arrival time of vehicle
Rolling Horizon Approach for Vehicle-Only Scenarios
Considering a vehicle-only scenario, the available information corresponds to the information of all vehicles that are currently communicating with the intersection controller. The level of information thus depends on the communication range
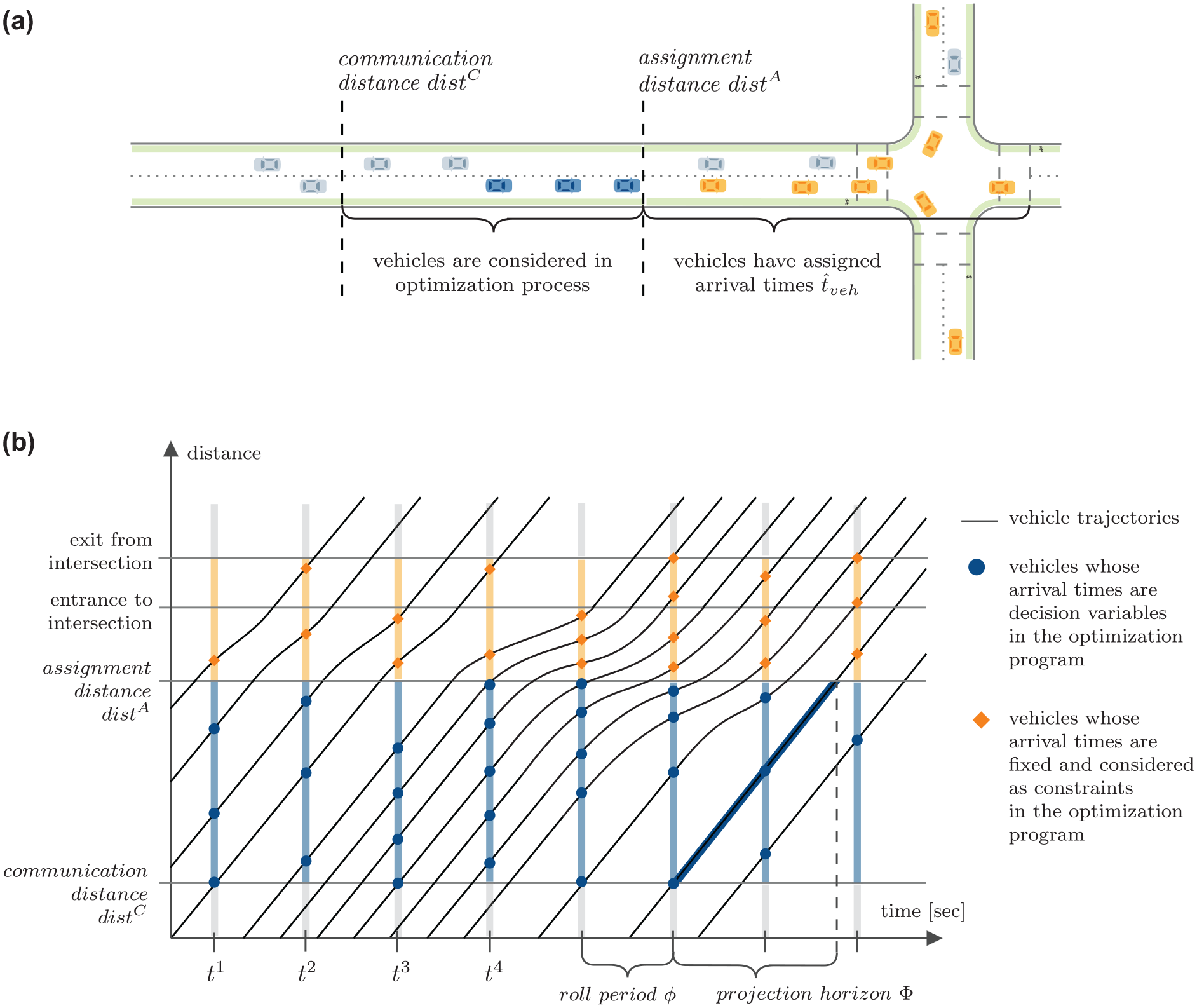
Representation of the relationship between spatial distance and time horizon: (a) schematic representation of communication distance and assignment distance and (b) example trajectories and schematic representation of the roll period
Figure 3b shows how these distance-wise considerations relate to the temporal dimension that is usually considered in rolling horizon approaches, and common terms such as “roll period” and “projection horizon” are displayed. The figure schematically shows trajectories of vehicles on the approach to and within the intersection zone. It is assumed that the optimization problem is run in fixed intervals of
Integration of Pedestrians
In contrast to vehicles, pedestrians are detected when they are already at the intersection. A flowchart of the overall procedure is shown in Figure 4a: if pedestrians arrive during a green phase, they can immediately start crossing. Otherwise, they are assigned to an already requested signal phase
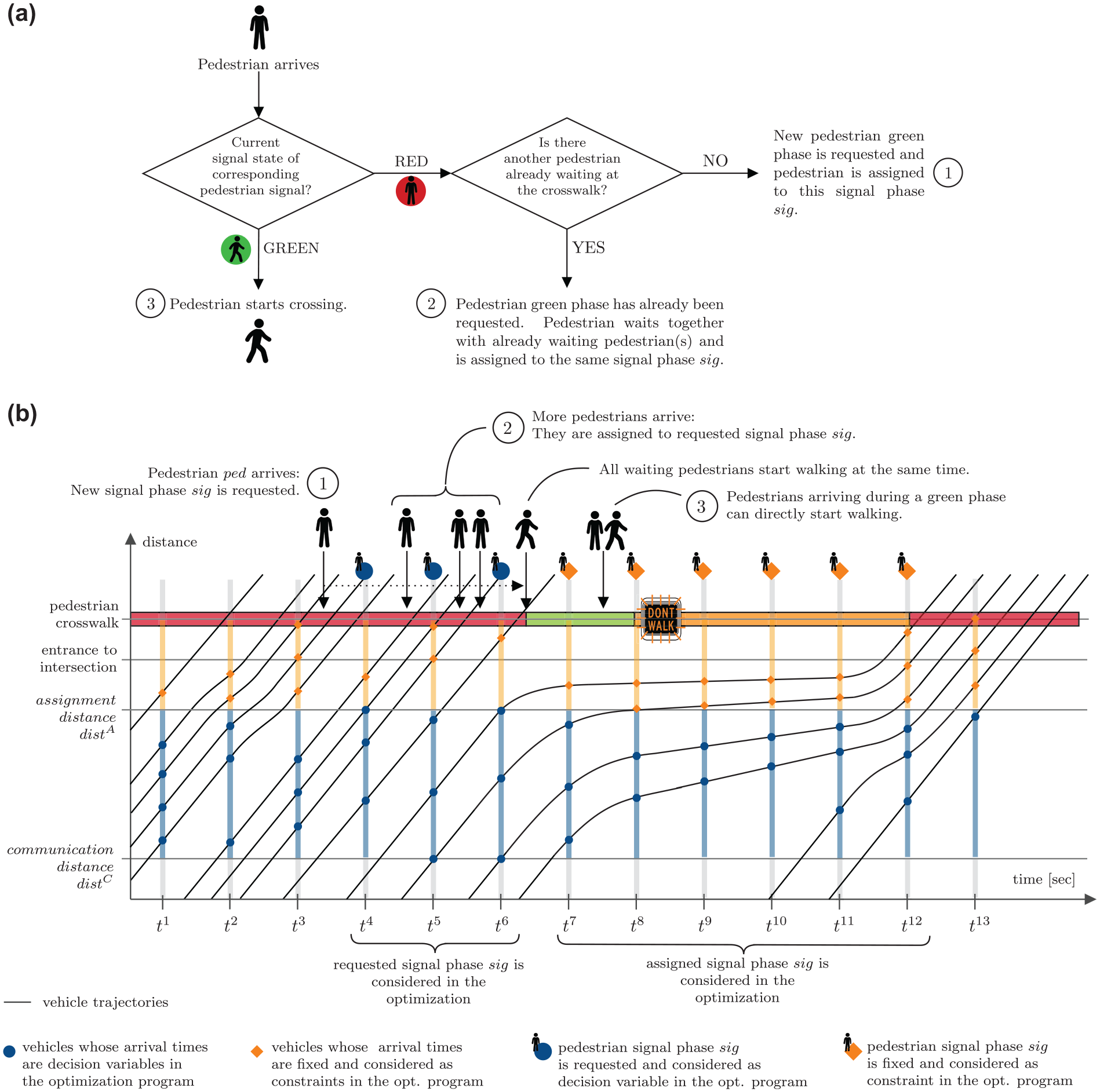
Flowchart and schematic representation of on-demand integration of pedestrian signal phases: (a) flowchart of on-demand integration of pedestrians and (b) example trajectories and schematic representation of the consideration of a requested pedestrian signal phase (color online only).
Figure 4b shows the three situations described above in the rolling horizon setup. It schematically displays the trajectories of vehicles on the approach to and within the intersection zone (similar to Figure 3b) and the on-demand integration of a pedestrian signal phase. As explained above, the optimization problem is run in fixed intervals of
Objective Function
The control delay per vehicle or pedestrian, respectively, is the decisive parameter to evaluate the level of service (LOS) at signalized intersection zones according to both the American Highway Capacity Manual (HCM) (
29
) and its German counterpart (
30
). It is also the most widely used performance indicator when evaluating AIM strategies (
14
). Similar to other studies (
17
,
27
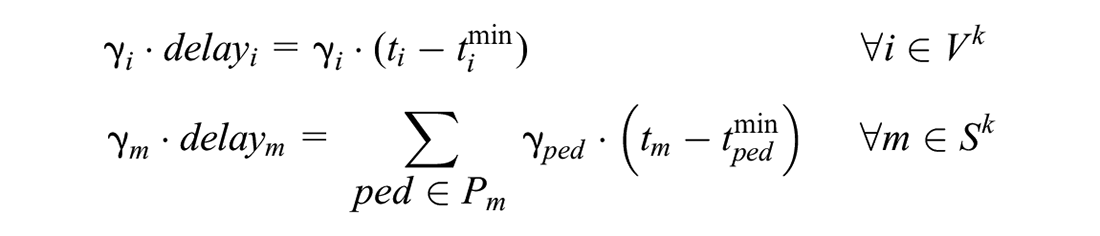
), the presented scheduling policy therefore aims at minimizing the sum over all delays. To balance delays and prioritize user groups, delays are additionally weighted in the objective function. For each vehicle

where

Overall, the objective function at time

Constraints
When the optimization problem is set up at time

subject to





















Equations 8 ensure that each arriving vehicle
For the optimization-based intersection control with vehicles only, Levin and Rey (
23
) show that the problem is feasible if delays are not bounded, that is, excluding Equations 10. Their proof can easily be extended to the scenario with vehicles and pedestrians. However, it is not possible to guarantee that a feasible solution with restrictive upper bounds on delays and pedestrian waiting times is found. In the scheme implemented in this paper, the upper bounds on vehicle delays
Simulation Setup
The presented strategy is implemented and tested using a microsimulation framework: road user arrivals and movements are simulated using Aimsun Next, which is connected to Python via the application programming interface (API). The Python program contains the rules for controlling the intersection and adjusting vehicle trajectories. The Gurobi optimization solver is used to set up and solve the optimization problem. Simulations are run for 60 min, including 10 min of warm-up time, and with five random seeds per scenario. All parameters described in the following are listed in Table 2. Minimum time gaps are set based on literature assumptions for the safe car-following behavior of CAVs ( 32 ) and all vehicle parameters are comparable to previous studies ( 6 , 7 ).
Parameter Values for the Test Scenarios
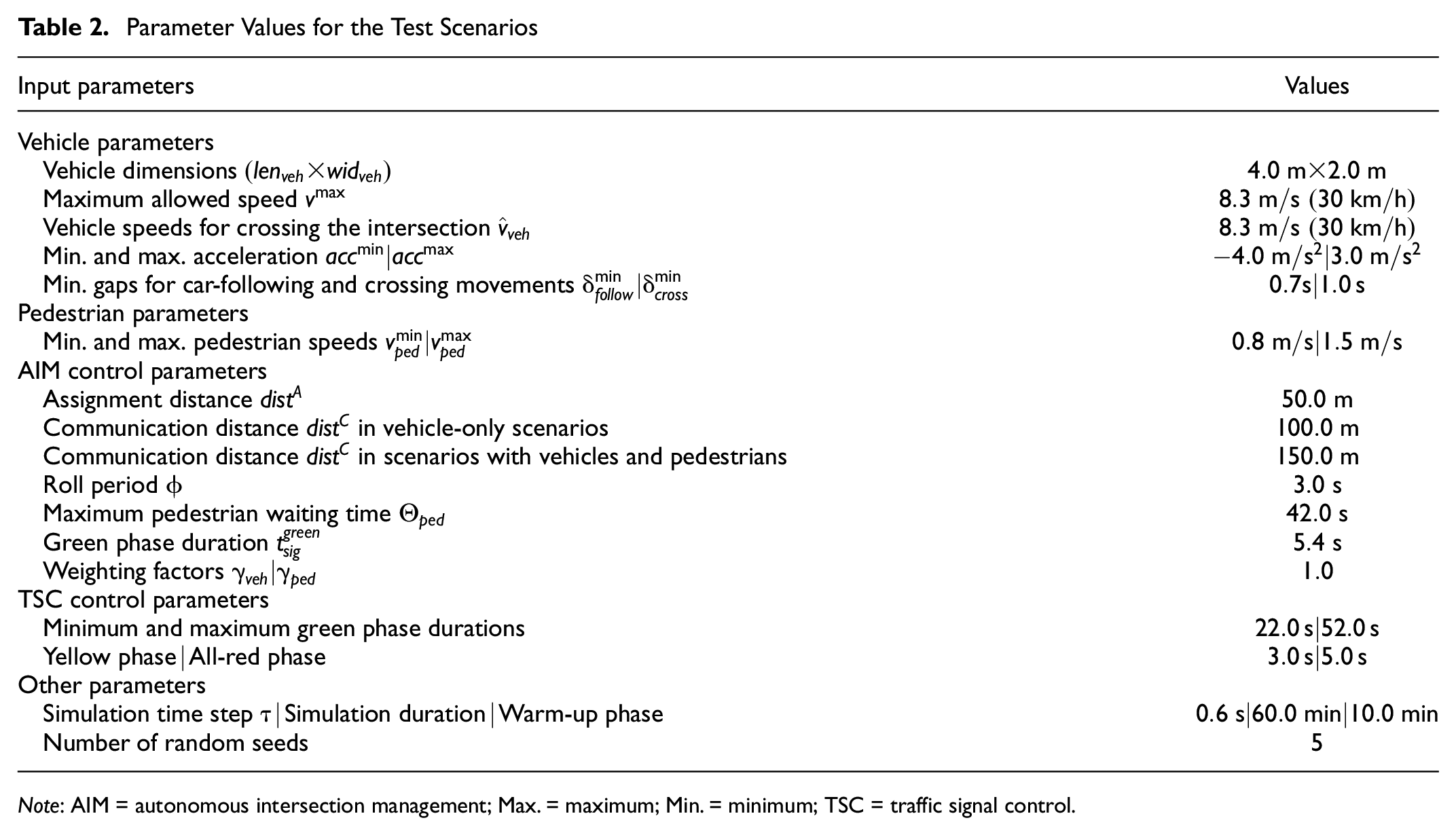
Note: AIM = autonomous intersection management; Max. = maximum; Min. = minimum; TSC = traffic signal control.
The intersection displayed in Figure 2a is simulated in this paper. Given the small size of the intersection and the importance of pedestrian movement, a speed limit of 30 km/h is assumed. To simplify the result discussion, it is assumed that all passenger vehicles have the same dimensions, kinematic limitations, and desired speeds. For the calculation of clearance times in the AIM, pedestrian walking speed is assumed to be 0.8 m/s, which is just below the 10th percentile of low-density walking speeds obtained from field measurements as reported by Hoogendoorn and Daamen ( 33 ). This is relatively slow as compared to the assumption of 1.2 m/s in the German TSC guideline, RiLSA ( 34 ). However, it needs to be noted that vehicles will arrive at the intersection at a higher speed in the AIM scenario. Therefore, pedestrian crosswalks need to be monitored by sensors. If pedestrians are detected on the street during a red phase, for example, because they are walking more slowly than expected or because of jaywalking, approaching vehicles need to slow down and request a new time slot for crossing the intersection.
Demand Scenarios
The vehicle demand scenarios are shown in Figure 5a. The scenarios are symmetric, that is, demand on all approaches is identical. Some 75% of the vehicles on each approach are through movement, 10% turn left, and 15% turn right. The total number of vehicles that cross the intersection per hour is denoted by the variable
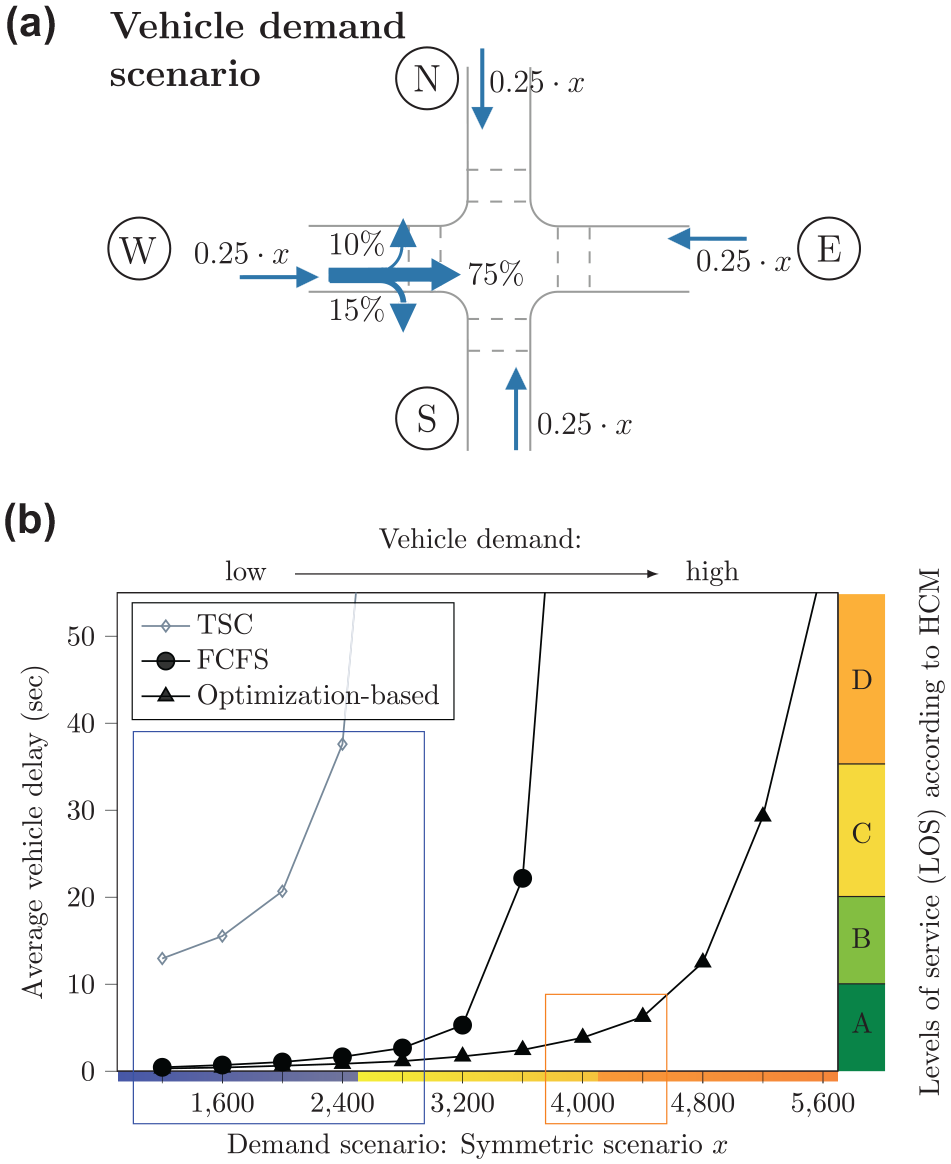
Demand scenarios and comparison of delays in the vehicle-only scenarios: (a) graphical representation of vehicle demand scenario
AIM Control Scenarios
In the evaluated scenarios, the maximum pedestrian waiting time
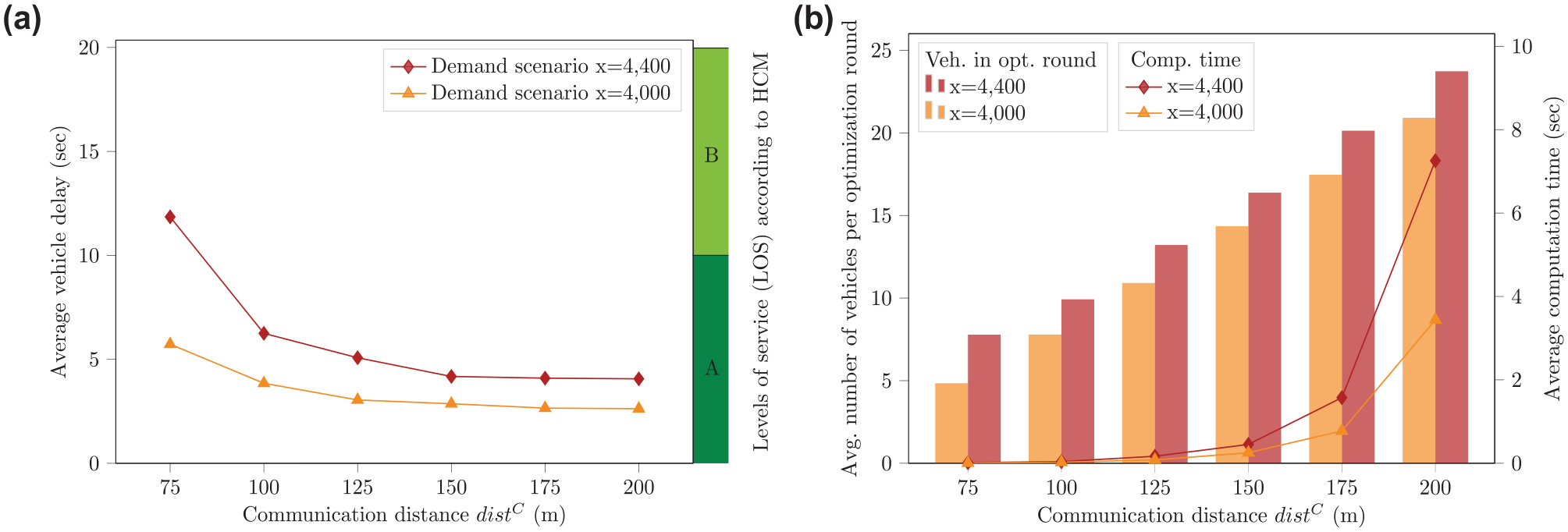
Impact of the communication distance on delays and computation times: (a) impact of the communication distance on the vehicle delay and (b) number of vehicles considered in each round of optimization and average computation times.
Benchmark TSC Scenarios
For the vehicle-only scenarios, a fully actuated two-phase TSC is implemented for comparison. It features minimum and maximum vehicle green intervals of 22 and 52 s in each phase, which together with yellow phase and all-red times implies cycle times of 60–120 s. This corresponds to the maximum allowed cycle time in Germany ( 34 ).
Results and Discussion
In the following, average vehicle and pedestrian delays will be evaluated. This section first looks at vehicle-only scenarios and then focuses on the impact that different control parameters with respect to the integration of pedestrians will have.
Vehicle-Only Scenarios
First of all, the presented optimization-based scheme is compared to a FCFS control and the described fully actuated TSC for a set of vehicle-only demand scenarios. Figure 5b shows that AIM significantly outperforms the TSC with respect to both delays and capacity. The relatively poor performance of the TSC partly results from the small intersection layout where left-turning vehicles stopped within the intersection block the way for vehicles behind them—many reviewed papers instead consider larger intersections where the difference is less striking ( 5 , 7 ). The capacity can further be increased significantly using the optimization-based control. The larger capacity resulting from the optimization-based control can be used in the multimodal scenarios where a portion of space–time will be blocked for vehicles and dedicated to pedestrian movement.
Figure 6a shows a delay comparison for different communication ranges
In the following evaluations, scenarios with up to 2800 vehicles per hour will be considered. While this looks like a rather low demand considering the impressive results of the optimization-based AIM, it needs to be noted that it already exceeds the capacity of both the implemented TSC and the FCFS-based AIM with pedestrians introduced by Niels et al. ( 6 ).
Scenarios with Vehicles and Pedestrians
In the presented setup, there are three different dials that can be adjusted to balance pedestrian waiting times and vehicle delays:
the bounded maximum pedestrian waiting times
the pedestrian weighting factor
the duration of a green phase
All of these parameters ultimately influence what portion of time is dedicated to pedestrian movement. In the following, their impacts are analyzed by implementing test scenarios that are based on the analysis of the slot-based control strategies presented in Niels et al. ( 6 ). The TSC results shown in Figure 5 (for vehicle delay) and analytically calculated TSC pedestrian delays based on the average cycle times and vehicle green times in the given demand scenario are shown for comparison. It needs to be noted that the presented results “oversell” the TSC, because (i) pedestrian movement is not simulated in the TSC scenario, thus neglecting delays caused by the interactions between vehicles and parallel pedestrian movement, and (ii) pedestrian green phases are usually shorter than vehicle green phases.
Impact of Maximum Pedestrian Waiting Times
Imposing the upper bound
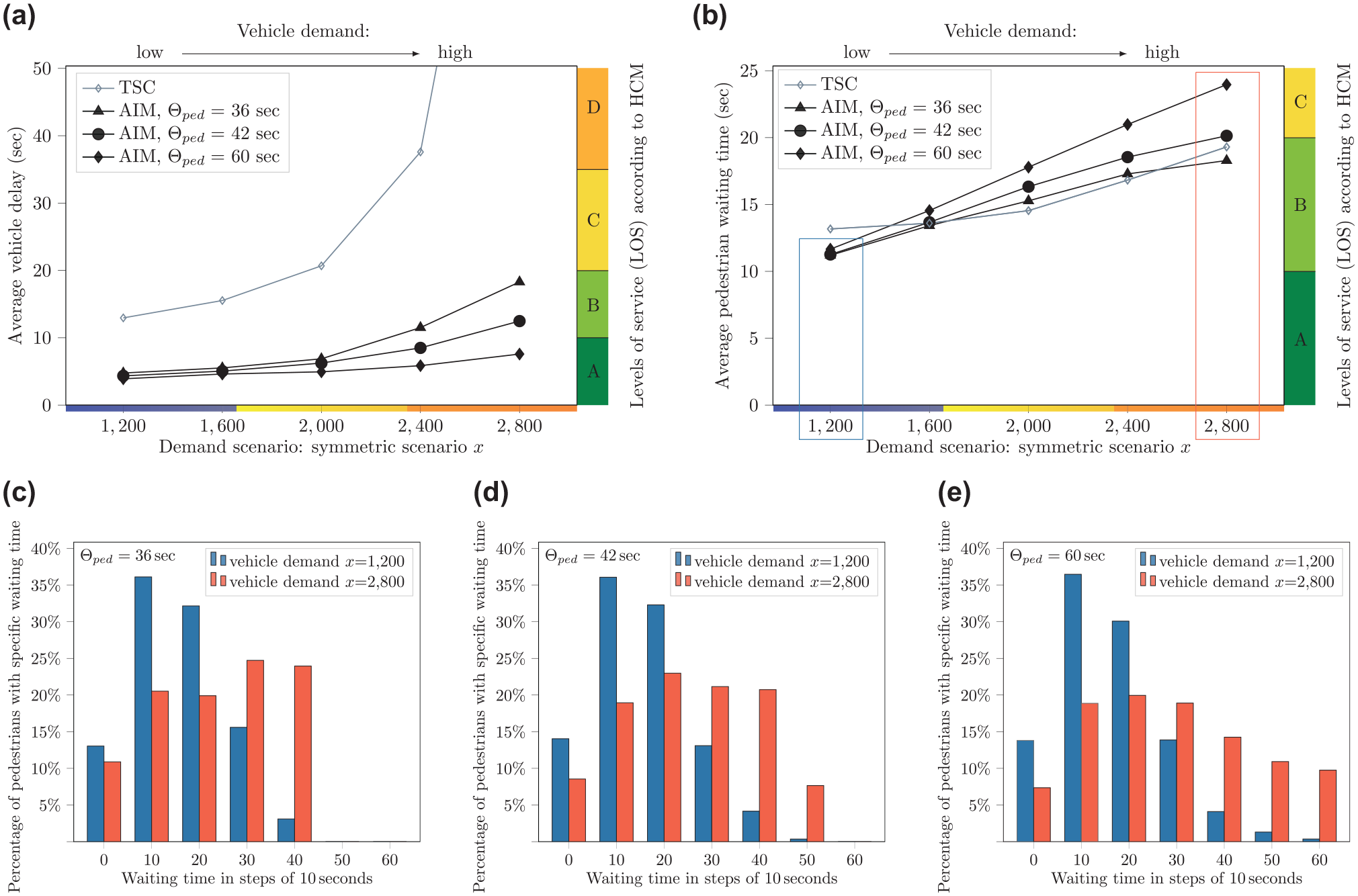
Average vehicle delays and pedestrian waiting times depending on vehicle demand and maximum pedestrian waiting time
Impact of Pedestrian Weighting Factor
To balance pedestrian waiting times for all considered vehicle demand scenarios, altered pedestrian weighting factors
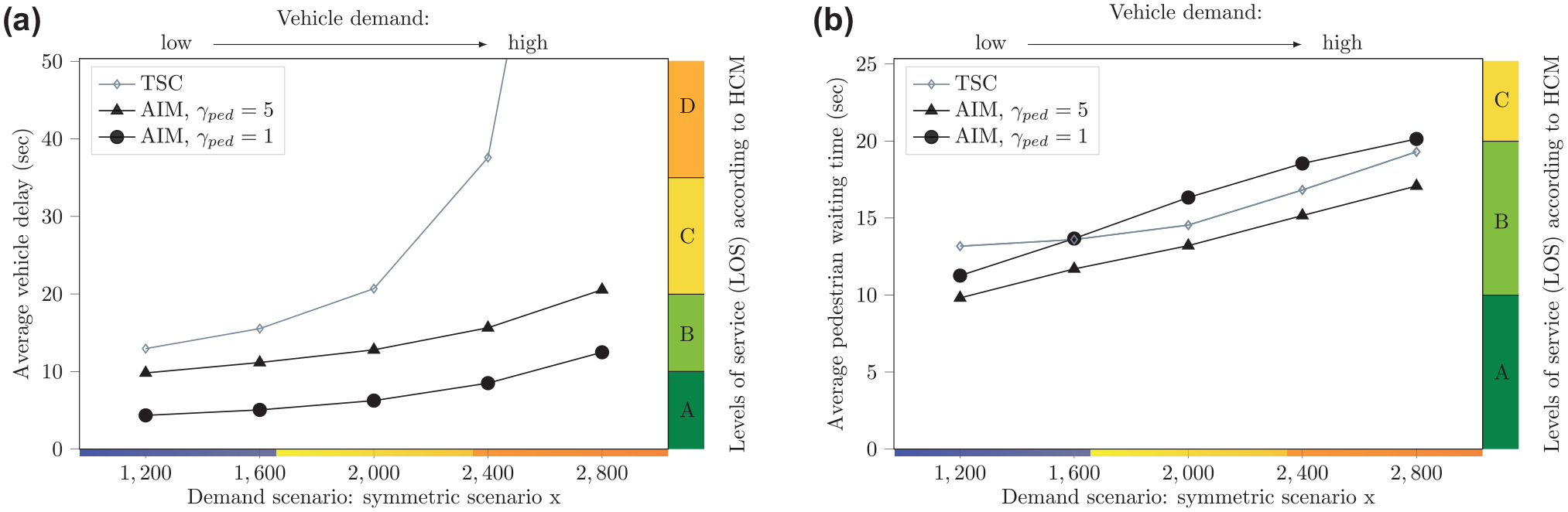
Average vehicle delays and pedestrian waiting times depending on vehicle demand and pedestrian weighting factor
Impact of Pedestrian Green Phase Duration
In the scenarios analyzed so far, each requested pedestrian signal phase has a green phase duration of 5.4 s. If a green phase is set to be longer, then the probability of a pedestrian arriving during the green phase increases. Figure 9 shows average vehicle delays and average pedestrian waiting times for increasing vehicle demand and two different green phase durations
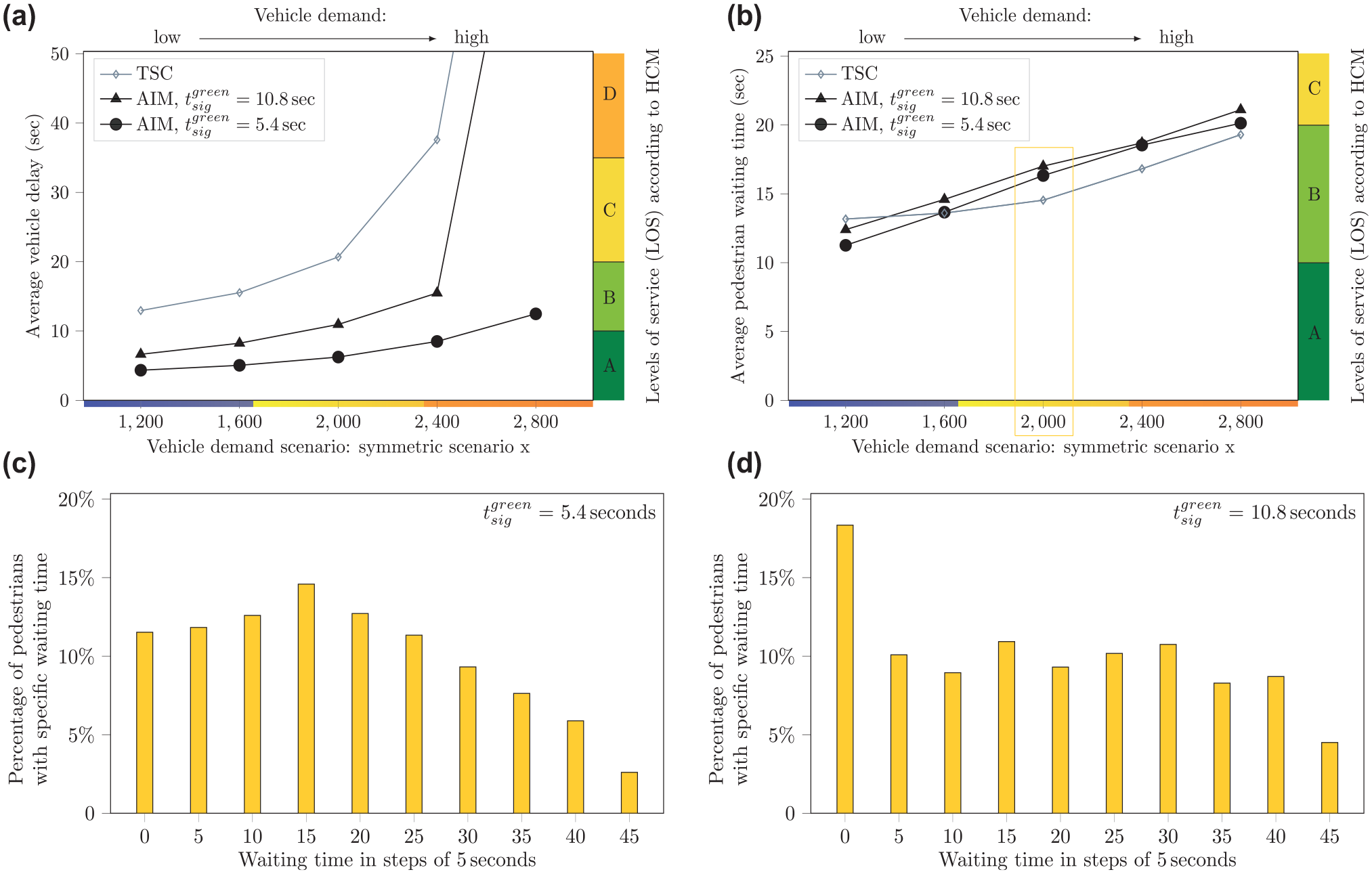
Average vehicle delays and pedestrian waiting times depending on vehicle demand and pedestrian green phase duration
Summary
Results show that the optimization-based AIM can significantly reduce delays and increase capacity in the vehicle-only scenarios. The improvements with respect to vehicle capacity and delays are also shown in scenarios where a considerable portion of time is dedicated to pedestrian movement: in the mixed scenarios, vehicle LOS can be improved in all demand scenarios while keeping pedestrian LOS on the same level as with TSC. The AIM offers several possibilities to balance vehicle and pedestrian delays. The effects depend on the interaction between different control parameters and the considered demand scenario. While differences in pedestrian waiting times might seem minor in Figures 6–8, the impact of vehicle demand on the results is clearly visible, and adjusting several parameters at the same time could lead to larger changes. The overall context is schematically displayed in Figure 10. In the figure, the first pedestrian
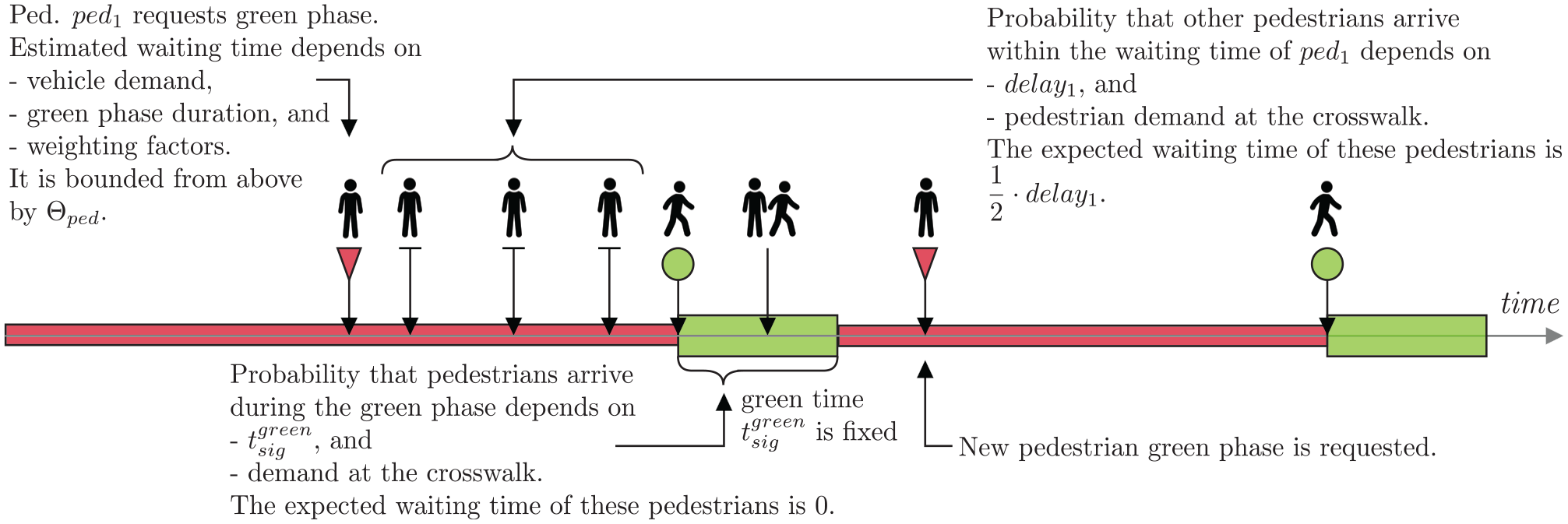
Schematic representation of the influence of the control parameters and demand scenario on average pedestrian waiting times.
Conclusion and Future Work
In this paper, an optimization-based AIM strategy for CAVs and pedestrians was explained and evaluated. Similar to previous studies of the authors, vehicles are assumed to directly sign up with the controller, while pedestrians are recognized by the infrastructure when they are at the intersection ( 6 , 7 ). The activation of pedestrian signal phases is fully integrated into the optimization problem. To account for limited communication distances and pedestrians not being equipped with connected devices, a rolling horizon scheme is presented and explained in detail. The simulation results confirm the significant improvements of optimization-based AIM as compared to FCFS and conventional TSC for vehicle-only scenarios. Furthermore, it is shown that these improvements even hold when considering mixed scenarios with vehicles and pedestrians while providing a pedestrian LOS that is comparable to that of TSC. In addition, the presented strategy allows for limiting pedestrian waiting times, prioritizing pedestrians via larger weighting factors in the objective function, and changing the green phase durations. A main focus was put on the demonstration and evaluation of how these control parameters can be used to balance vehicle and pedestrian delays. In the future, the control parameters can be tuned based on the considered demand situation and the policy objectives.
The proposed intersection model allows for the integration of heterogeneous vehicle types and is easily transferable to other intersection layouts. To evaluate the potentials of the control at a realistic urban intersection, we are currently working on considering diverse vehicle speeds (e.g., slower turning movements) and the integration of bicyclists into the setup. In addition, the consideration of downstream congestion and the coordination of several intersections on a road stretch or even in a network opens up new and interesting research questions.
Footnotes
Acknowledgements
A free Aimsun Next postgraduate license was used for conducting this research. This research is a part of the PhD thesis of T. Niels.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: T. Niels, K. Bogenberger, M. Papageorgiou, I. Papamichail; data collection: T. Niels; analysis and interpretation of results: T. Niels, K. Bogenberger, M. Papageorgiou, I. Papamichail; draft manuscript preparation: T. Niels. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.