
Abstract
Decision-makers in synchromodal transport (ST) have different preferences toward different objectives, such as cost, time, and emissions. To solve the conflicts among objectives and obtain preferred solutions, a preference-based multi-objective optimization model is developed. In ST, containers need to be transferred across modes, therefore the optimization problem is formulated as a pickup and delivery problem with transshipment. The preferences of decision-makers are usually expressed in linguistic terms, so weight intervals, that is, minimum and maximum weights, are assigned to objectives to represent such vague preferences. An adaptive large neighborhood search is developed and used to obtain non-dominated solutions to construct the Pareto frontier. Moreover, synchronization is an important feature of ST and it makes available resources fully utilized. Therefore, four synchronization cases are identified and studied to make outgoing vehicles cooperate with changes of incoming vehicles’ schedules at transshipment terminals. Case studies in the Rhine-Alpine corridor are designed and the results show that the proposed approach provides non-dominated solutions which are in line with preferences. Moreover, the mode share under different preferences is analyzed, which signals that different sustainability policies in transportation will influence the mode share.
Keywords
With the growth of international trade in recent decades, the use of intermodal transportation is increasing because of its positive impacts on economics and the environment ( 1 , 2 ). Intermodal transport means freight transported by at least two modes, for example, barge, train, and truck. Trucks are fast and flexible but with high carbon emissions, while trains are slow with low carbon emissions. Barges are also slow but are good with both low cost and low carbon emissions ( 3 ). Synchromodal transport (ST) is the newest concept in the conceptual evolution of intermodal transport, which optimally uses all kinds of available resources and selects transport routes/modes at any time based on the operational circumstances, customer requirements, or both ( 1 , 4 ).
In ST, carriers (operators of vehicles) have different preferences toward different objectives according to the requirements of shippers (owners or suppliers of containers). Typically, the primary objective of carriers is to minimize the transport cost. Transport time also plays an important role in transport route optimization because it influences both cost and reliability. Moreover, the government stimulates stakeholders to minimize the total
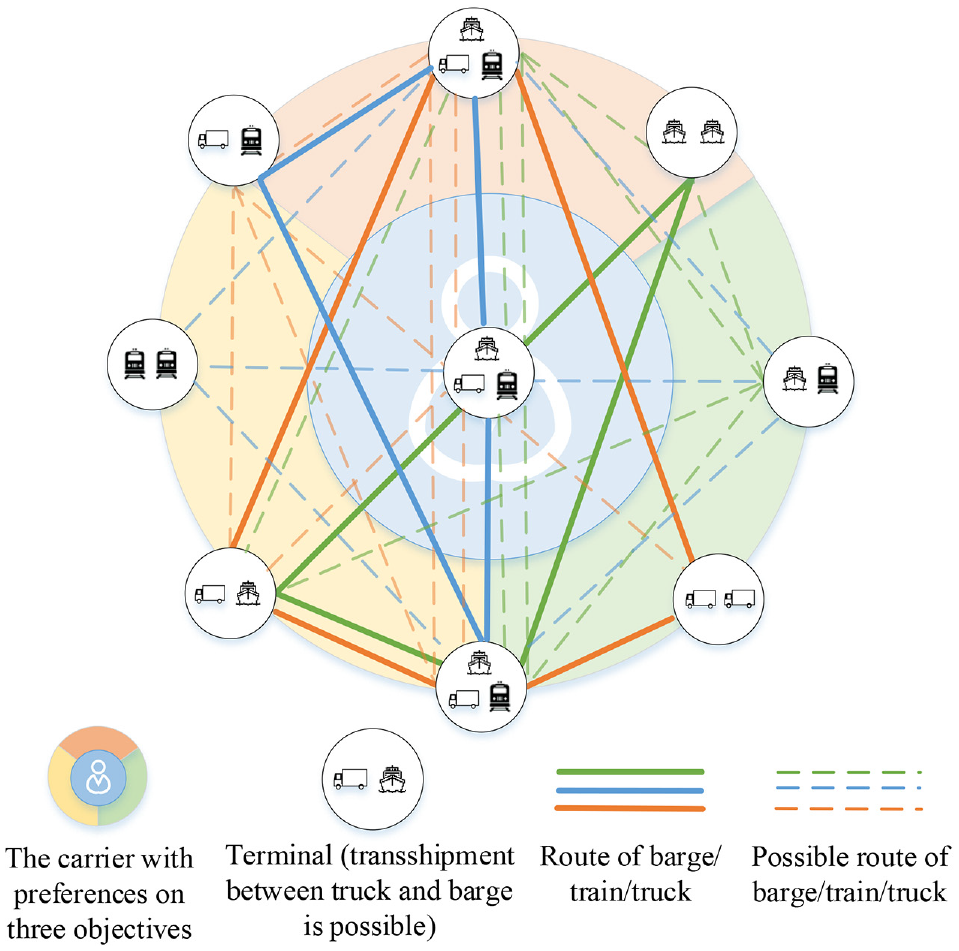
Vehicle routing for synchromodal transport considering preferences and synchronization.
To address the above gaps, this work introduces a preference-based multi-objective optimization model for ST. The optimization problem is formulated as a pickup and delivery problem with transshipment (PDPT), and an adaptive large neighborhood search (ALNS) is developed to solve it. The remainder of this paper is structured as follows. The second section presents a brief literature review which is followed by problem description and mathematical model. Next, the solution methodology is presented, after which experimental settings and results are provided. The final section concludes the paper and gives future research directions.
Literature Review
This paper studies transshipment, synchronization, and preferences-based multi-objective optimization in ST. Therefore, the presented literature review focuses on these three distinctive aspects as well as literature that studies multi-objective optimization for intermodal transport.
Transshipment
A distinctive feature of intermodal transport is the transshipment between modes/vehicles. To model transshipment, most scholars use the network flow (NF) model, in which commodity flows are covered by arcs and paths (a series of arcs) of the transport network rather than routes of vehicles ( 1 ). The type of vehicles used can be then ignored and containers can be transferred freely in nodes of the network. The advantage of this approach is that the computation time is relatively short. However, these studies lack a direct vehicle routing component ( 8 ). Compared with the NF model, optimizing both container and vehicle routing brings three benefits:
Capacity constraints and time constraints can be used on vehicles rather than services, which is more accurate.
In the NF model, containers can only be transported on the predefined arc. If the vehicle routing is considered, the containers can change routes on nodes of the arc, which is more flexible.
The optimization results can provide the routing plan to vehicles directly, which is more practical.
Transshipment between vehicles is also a common practice in other transportation operations and is considered in various modeling approaches, including vehicle routing problem with trailers and transshipment ( 9 ), vehicle routing problem with cross-docking ( 10 ), and PDPT ( 11 ). PDPT is suitable for ST. Thus this research studies PDPT for ST, considering both container routing and vehicle routing.
In a previous paper ( 12 ), the authors proposed an optimization model for PDPT in inland waterway transport. There are three main differences between Zhang et al. ( 12 ) and this paper: (a) Zhang et al. ( 12 ) only optimized the routing of barges, while this paper considers multiple modes; (b) this paper takes preferences into account, which is not considered by Zhang et al. ( 12 ); (c) specific synchronization cases are presented in this paper, and they are not illustrated in Zhang et al. ( 12 ).
Synchronization
To use the available resources optimally, synchronization is a key factor in optimization for ST (
5
). In the standard vehicle routing problem (VRP), vehicles are independent of one another. For example, removing a request from one route does not affect any other route before this request is inserted into routes again. In ST, by contrast, a change in one route may have effects on other routes even though no request is removed or added. For example, removing request 1 from a route of vehicle
Synchronization in VRP has been studied in the literature. According to Drexl ( 8 ), the following types of problems need to consider synchronization:
Pickup and delivery problem with split loads ( 14 ).
VRP with transshipment of loads or transfer of persons ( 15 ).
The requirement of simultaneous presence of vehicles at a location to render a service ( 16 ).
The existence of nonautonomous vehicles ( 17 ).
The problem in this research belongs to the second type: VRP with transshipment of loads. Although many studies have contributed to synchronization in VRP, to the best of the authors’ knowledge, synchronization has not been studied fully in ST ( 5 ).
Preference-Based Multi-Objective Optimization
Wang et al. ( 18 ) provide a summary of methods on how to incorporate preferences into multi-objective optimization (MOO), such as weight sum method, reference point, reference direction, utility function, and so forth. According to Coello et al. ( 19 ), preference-based MOO approaches are divided into three categories: priori ( 20 , 21 ), progressive ( 22 , 23 ), and posteriori ( 24 ) preference articulations, which mean making decisions before, during, and after search, respectively. In ST, it may be impractical for a decision-maker (DM) to specify their preferences completely before any alternatives are known. However, the DM has at least a rough idea about the reasonable trade-offs between different objectives, which is termed vague preferences. For example, Szlapczynska and Szlapczynski ( 20 ) propose a MOO model in ship weather routing, considering vague preferences of DMs in the form of weight intervals. Therefore, the priori preference articulations approach is used in this paper and Pareto optimal solutions are obtained according to preferences.
The
MOO for Intermodal Transport
Two types of problems are considered in the literature. The service network design problem relates to choosing services and optimizing vehicle frequencies in the transport network. Route optimization involves the planning decisions of routes and modes. The methods for solving MOO used in different studies are different. Table 1 provides a summary of models in the literature to position the present work. As mentioned above, the vehicle routing component has many benefits; taking synchronization into account is conducive to making full use of limited resources, and considering preferences is important to solve the conflicts among objectives. However, vehicle routing, synchronization, and preferences are rarely considered in the literature and these are the core contributions of this paper. Furthermore, an ALNS algorithm is used to solve the problem, and the procedures within ALNS are tailored to be specific to the synchromodal case which is another distinction of this paper.
Comparison of Models in the Literature
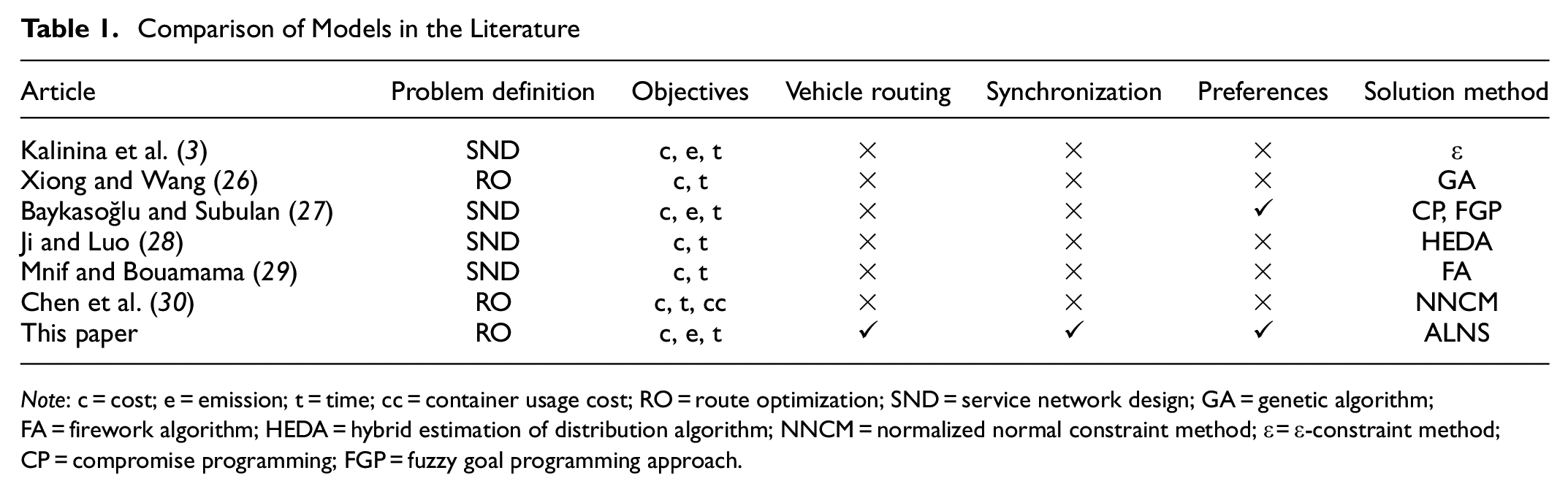
Note: c = cost; e = emission; t = time; cc = container usage cost; RO = route optimization; SND = service network design; GA = genetic algorithm; FA = firework algorithm; HEDA = hybrid estimation of distribution algorithm; NNCM = normalized normal constraint method;
Problem Description
The main research question of this study is: How can ST be optimized according to the preferences of the carrier? To answer this research question, three key research problems need to be solved, as shown in Figure 2:
Compared with unimodal transport, ST is more complex because multiple modes are used and transshipment is needed between modes/vehicles. As illustrated in the literature review, considering both container routing and vehicle routing in transshipment modeling makes the optimization more accurate, more flexible, and more practical. To add vehicle routing into the model, the following research questions need to be answered: How to optimize container routing and vehicle routing simultaneously? How to model the transshipment with both vehicle and container constraints?
Compared with intermodal transport, synchronization should be taken into account because of the synchromodality requirements in ST. Because of the transshipment, the route planning of a vehicle in ST may depend on the route planning of other vehicles. With regard to the optimization problem, a PDPT only makes the transshipment possible, but does not make full use of transshipment because many solutions are infeasible without synchronization. By coordinating vehicles, synchronization takes full advantage of serving a request by multiple vehicles/modes in ST. The following research questions need to be considered in the synchronization: Is the vehicle dependent on one vehicle or multiple vehicles? How do the vehicles coordinate when they are dependent on each other? Is there an infeasible solution no matter how the vehicles are coordinated?
Compared with single-objective optimization, conflicts between objectives need to be considered in the MOO. By taking preferences into account, the problem may be addressed. As mentioned above, in ST DMs usually cannot provide accurate preferences. Therefore, we should consider first how to represent the vague preferences of DMs. Then, how to incorporate preferences into the optimization model is another problem to consider.
Solving Problem 1 (P1) is the basis for solving Problem 2 (P2) and Problem 3 (P3). All methods for these problems are used to establish the preference-based MOO model for ST, which will be used to obtain attractive solutions for DMs.
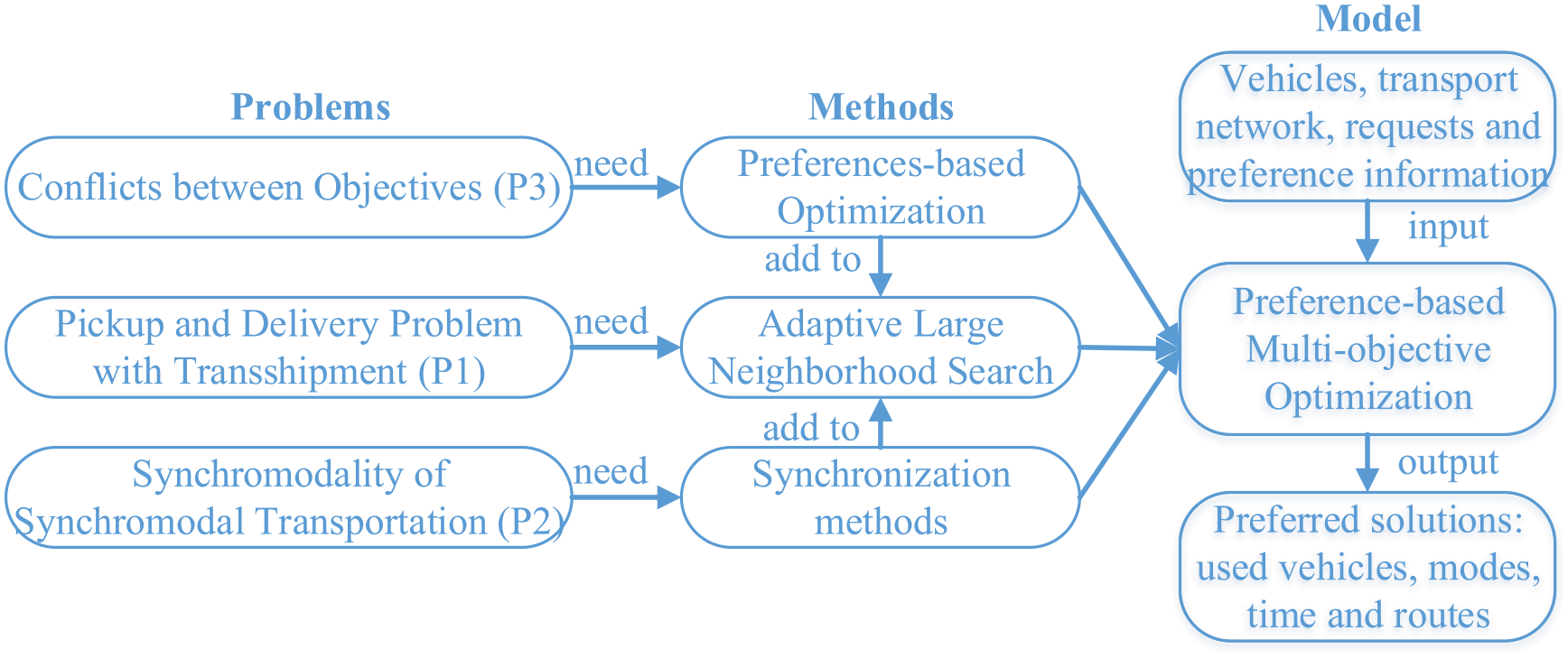
Key research problems in this study.
Mathematical Model
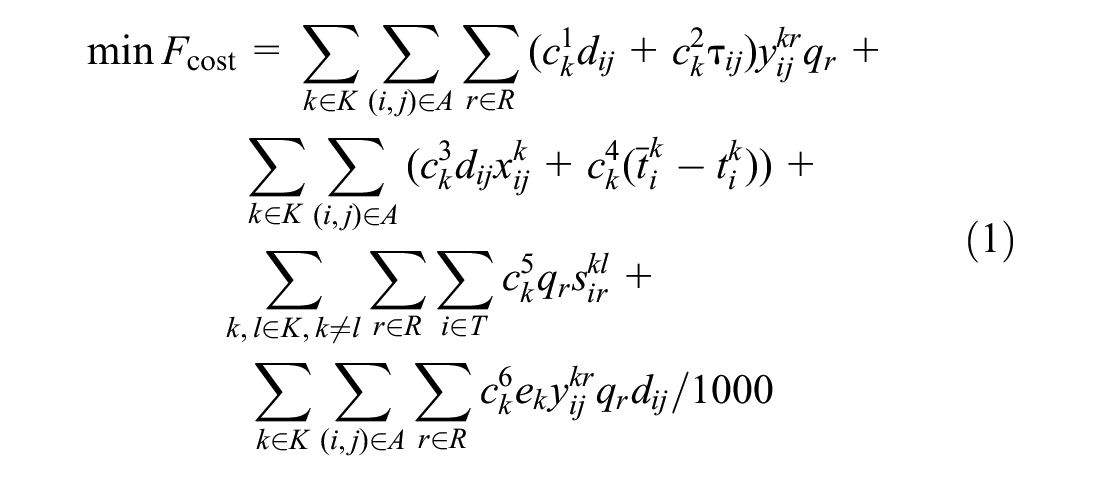
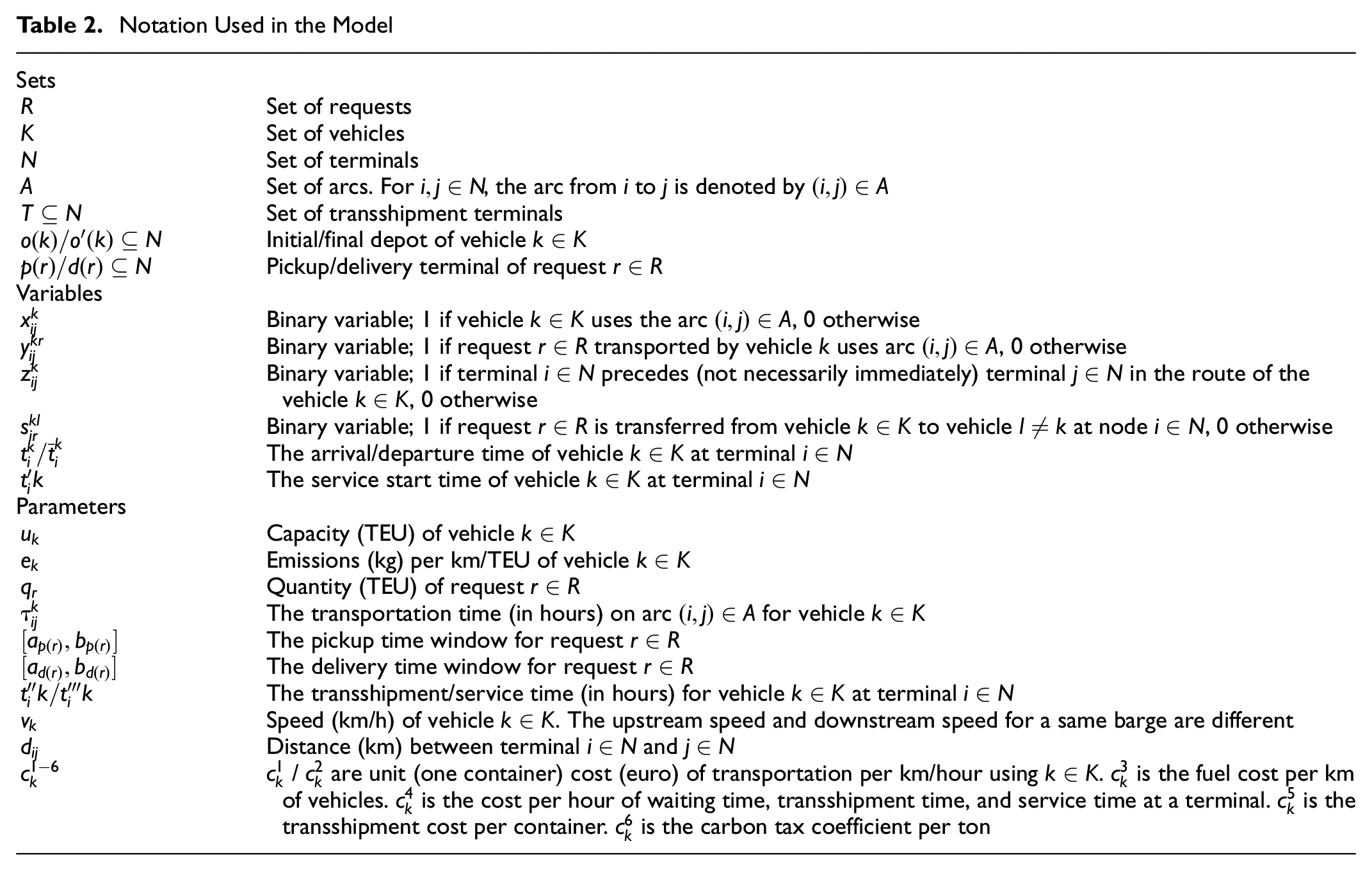
The notations of the mathematical model are given in Table 2. A MOO model for the PDPT in ST is given by Equations 1–32 as described below. Three objectives, that is, minimizing cost, emissions, and time, are considered, as Equations 1–3 show. The cost objective consists of transportation cost of containers, fuel cost, transshipment cost, and cost associated with waiting, service, and transshipment time. “Emissions” in this paper refers to CO2 emissions. There are different ways to calculate such emissions in the literature (
31
), and the activity-based method is one of the popular methods because activity data is easier to obtain compared with other methods (
32
,
33
). Therefore this work uses the activity-based method and calculation of CO2 emissions based on vehicle type, distance, and amount of containers (
34
). For different modes the emissions factor


Notation Used in the Model
Constraints (4)–(21) are the spatial constraints. Constraints (4)–(11) are typical constraints in PDP. Constraints (4) and (5) ensure that a vehicle begins and ends at its begin and end depot, respectively. Constraints (6) and (7) ensure that containers for each request must be picked and delivered at its pick up and delivery terminal, respectively. Constraints (8)–(10) are the subtour elimination constraints, which provide tight bounds among several polynomial-size versions of subtour elimination constraints ( 35 ). Constraint (11) is the capacity constraint.








Flow conservation constraints of both vehicles and requests are handled by Constraints (12)–(15). Constraint (12) represents flow conservation for vehicle flow and (13)–(14) represent flow conservation for request flow. Constraint (13) is for transshipment terminals, and Constraint (14) is for regular terminals. Constraint (15) links




Constraints (16)–(18) facilitate transshipment. Constraint (16) ensures that the transshipment occurs only once in the transshipment terminal. Furthermore, Constraints (17) and (18) allow the transshipment only when the request is transported by both vehicles



Characteristics of ST are considered in Constraints (19)–(21). Constraint (19) avoids vehicles running on unsuitable routes, for example, trucks cannot run on inland waterways. Constraint (20) takes care of predefined routes for certain vehicles, for example, trains have fixed routes and terminals. Constraint (21) ensures the transshipment occurs in the right transshipment terminal, because some transshipment terminals only allow the transshipment between two specific modes. When containers need to be transferred from barges to trucks, terminals that only allow transshipment between barges and trains will not be considered.



Constraints (22)–(30) are the temporal constraints. Constraint (22) guarantees that the arrival time of vehicle is earlier than the service start time. Constraint (23) maintains that the departure happens only after the service is completed. Constraint (24) ensures that the time on the route is consistent with the distance traveled and speed, and that






Constraints (28)–(30) include time constraints for transshipment. If there is a transshipment from vehicle



Constraints (31) and (32) set variables


With regard to complexity, there are a total of
Solution Methodology
This section solves the research problems one by one. First, to solve the PDPT, an ALNS approach is developed and the ALNS structure is described. Next, to make full use of available resources, the synchronization methods between vehicles/modes are proposed. Finally, to solve the conflicts between objectives and obtain preferred solutions, the weight interval method proposed by Szlapczynska and Szlapczynski ( 20 ) is used to add vague preferences to the MOO model. Note that both preferences and synchronization are incorporated into ALNS.
ALNS Algorithm
Solving the MOO problem to optimality by the exact approach often needs multiple runs for different objectives and a long computation time. In the authors’ previous work ( 12 ), Gurobi was used to solve a similar PDPT in inland waterway transport, and the results showed that it took more than 12 h when there were more than six requests. Therefore, heuristics are needed to solve MOO. ALNS has already been used for VRP successfully and it performs well on large-scale instances ( 11 , 14 , 16 ). The adaptive nature of ALNS, that is, choosing operators according to their past performances, is a significant advantage over other approaches. Therefore, ALNS is chosen for solving the optimization problem in this study.
ALNS was proposed in 2006 based on an extension of the large neighborhood search heuristic (
36
), and ALNS adopted an adaptive mechanism to make it robust in different scenarios. To solve the MOO problem and reduce the computation time, a preference-based ALNS is proposed, as shown in Algorithm 1. The input of the algorithm is vehicles information
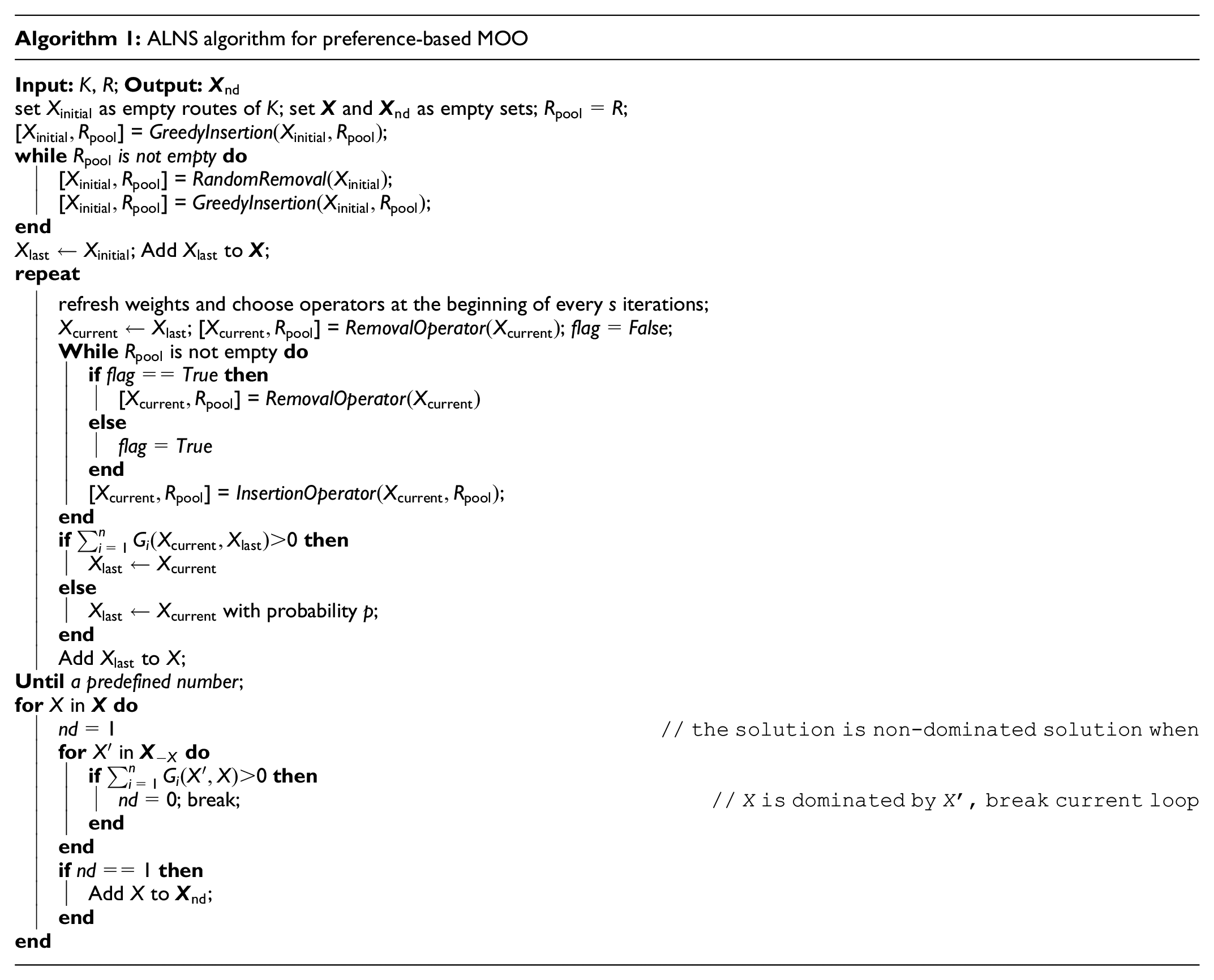
At the end of the iteration, a decision is made whether to accept current solution

where
After all solutions are obtained and stored in the solution set
The design of different operators is widely discussed in the literature ( 11 , 36– 39 ) as well as the authors’ previous paper ( 12 ). Besides traditional operators, including Greedy Insertion, Transshipment Insertion, Random Insertion, Worst Removal, and Random Removal operators, this work designs two customized operators, that is, Route Removal and Node Removal operators. The following introduces the customized operators in detail and the others are introduced briefly.
Synchronization Between Vehicles
This work studies the synchronization among vehicles, which means that vehicles can cooperate to get the best solution when a vehicle influences other vehicles (especially when there is transshipment between vehicles/modes). For example, in the transshipment terminal, if the delivery vehicle arrives later than the planned time, the route plan of the pickup vehicle needs to be synchronized to find a suitable arrival time. Synchronization is considered after ALNS operators are used. If the current solution violates constraints, such as time constraints, the synchronization procedure will start and make other vehicles cooperate with the insertion/removal. After the synchronization, the feasibility of the solution will be rechecked.
Four cases are listed below to illustrate the synchronization among vehicles in ST.
Synchronization Case 1
When a request is transported by more than one vehicle, the time between these vehicles is synchronized, as shown in Figure 3a. The time from the arrival time till the service start time is the waiting time, and departure happens after service time or transshipment time is completed. In Figure 3a, the request is first transported by vehicle
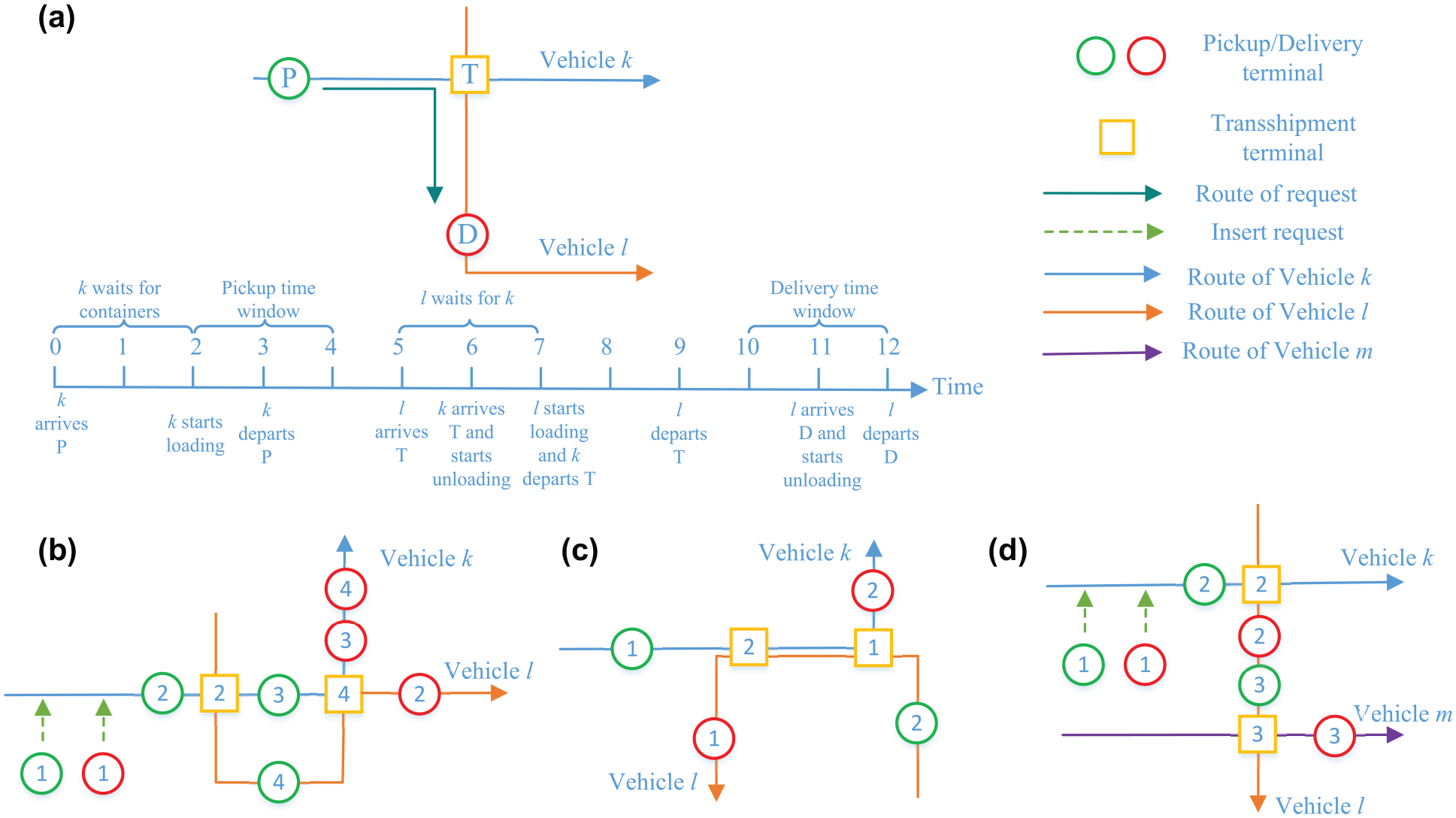
Synchronization cases: (a) case 1: time synchronization in the transshipment terminal, (b) case 2: complex transshipment situation, (c) case 3: synchronization with cross requests, and (d) case 4: synchronization of relevant routes.
Synchronization Case 2
Extended from case 1, a more complex situation is considered, as shown in Figure 3b. When request 1 is inserted in vehicle
Synchronization Case 3
After the insertion, when there are cross requests, as shown in Figure 3c, the solution is infeasible. According to the time constraints, we have the following equations:




where

which violates Equation 34b, therefore this solution is infeasible.
Synchronization Case 4
The synchronization for relevant vehicles is considered. Except for the situation described above, other vehicles may be influenced by the transshipment when one request is inserted or removed. As shown in Figure 3d, request 1 is inserted into the route of vehicle
Weight Interval Method
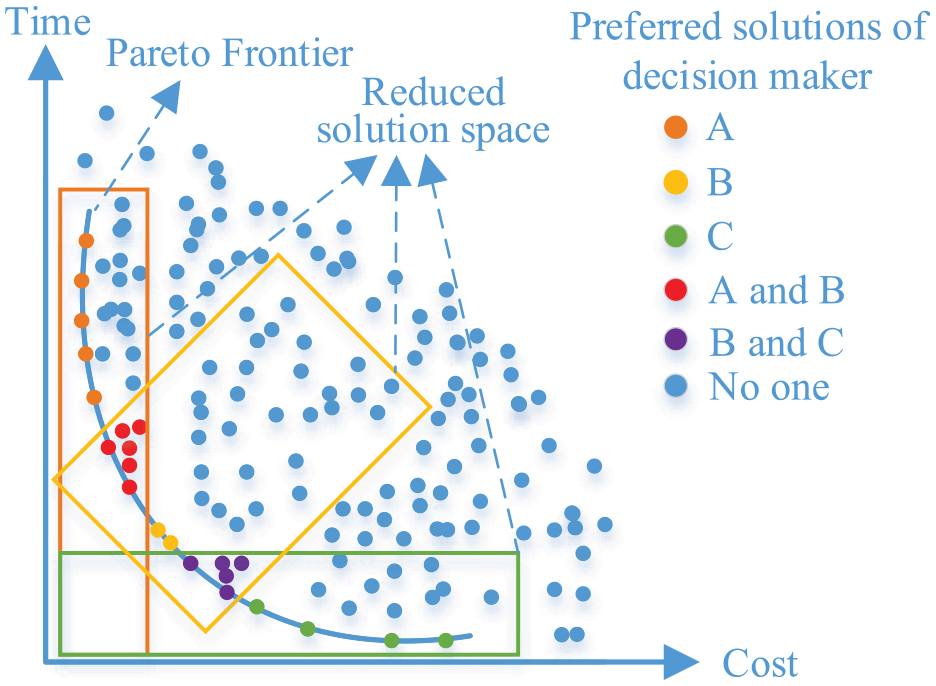
MOO aims to yield a set of non-dominated solutions presenting the optimal trade-offs between different objectives. These solutions are obtained by the Pareto improvement, which means a change to a different solution that makes at least one objective better off without making any other objective worse off. Figure 4 gives the Pareto frontier of bi-objective optimization for ST, where different DMs have different preferred solutions. As shown in Figure 4, preferred solutions are non-dominated solutions, which are in line with DMs’ preferences. DM A mainly wants to minimize the cost, DM C prefers to reduce the transport time, and DM B wants to balance cost and time. Based on their preferences, they will choose their preferred solutions in the Pareto frontier. Therefore, it is important to consider DMs’ preferences in MOO. Integrating preferences into the MOO approach and guiding the search toward solutions that are considered relevant by the DM may yield two important advantages:
Instead of a diverse set of solutions, many of them clearly irrelevant to the DM, a search guided toward the DM’s preferences will yield a more fine-grained and suitable selection of alternatives.
By focusing the search onto the relevant part of the search space, the objective space and the computation time can be reduced, especially when solving real-life MOO problems ( 20 , 41 ).
Using the weight interval method proposed by Szlapczynska and Szlapczynski (
20
), the vague preferences are added to ALNS. The weight interval which is assigned to the

where
The Pareto frontier of bi-objective optimization for synchromodal transport.
Under the vague preferences, the Pareto dominance rule is extended from traditional Pareto dominance (
20
). In this paper, solution

where
and
In ALNS, vague preferences are considered when comparing solutions. Before comparison, all objectives are normalized.
Case Study
The proposed model is applied to a ST network in the Rhine-Alpine corridor, which runs from Rotterdam to Genoa along the Rhine River through Europe’s industrial heart. All experiments are implemented in Python 3.7 and run with 8 GB of memory and an Intel Core i7 CPU with two 1.90 GHz and 2.11 GHz cores.
We assume that shippers provide the request information (including pickup and delivery terminals, number of containers, and time windows), and carriers provide transport network information (including terminal location and type, distances among terminals, vehicle information, and cost data). The coefficients, such as carbon emission, loading/unloading time, and transshipment cost, are derived from Van Riessen et al. (
6
), Guo et al. (
34
), and Li et al. (
42
). The coefficients used are as follows:
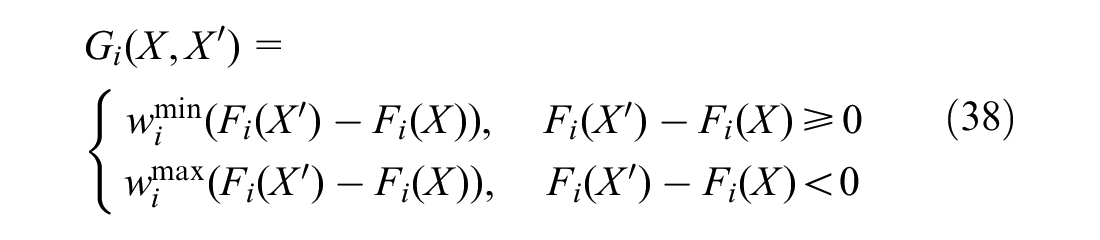
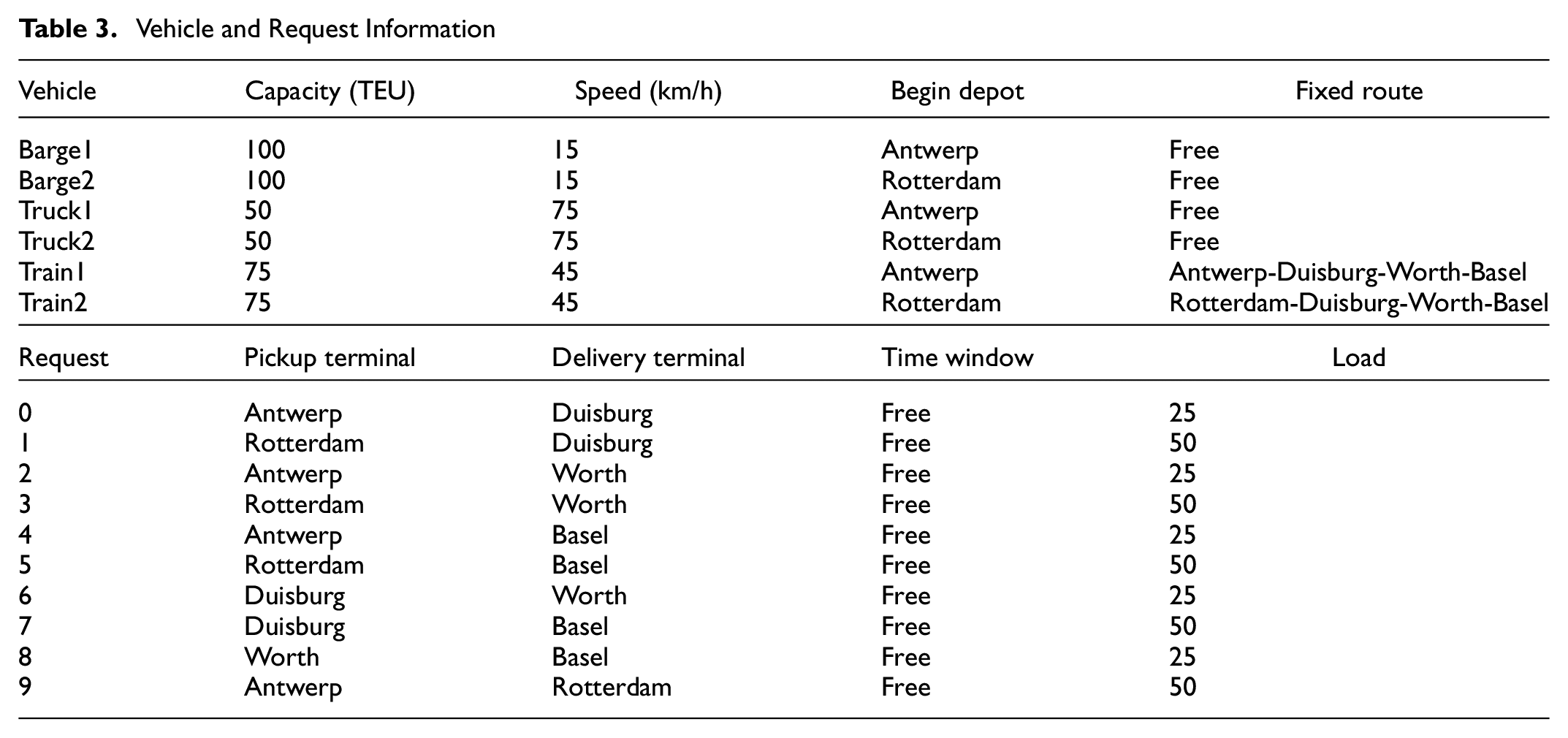
The parameters in ALNS need to be tuned before the optimization. To do that, the Pareto frontiers need to be compared in MOO instead of solutions comparison in the parameter tuning of single-objective optimization. The average value of all non-dominated solutions’ objective function values represent the Pareto frontier in the frontiers comparison, as Equation 39 shows:

where
The parameters to be tuned include total iteration number, number of iterations for refreshing weights, initial temperature, and cooling rate. For example, the iteration number influences the quality of results, as shown in Figure 5, which shows Pareto frontiers for 10 requests and five vehicles under two objectives (cost and emission). Because
Pareto frontiers of bi-objective optimization under 50 iterations and 3,000 iterations: (a) regular Pareto frontier, (b) cost&emission: [0.1,0.9], (c) cost&emission: [0.25,0.75], (d) cost&emission: [0.33,0.66], (e) cost: [0.1,0.5], emission: [0.5,1.0], and (f) cost: [0.5,1.0], emission: [0.1,0.5].
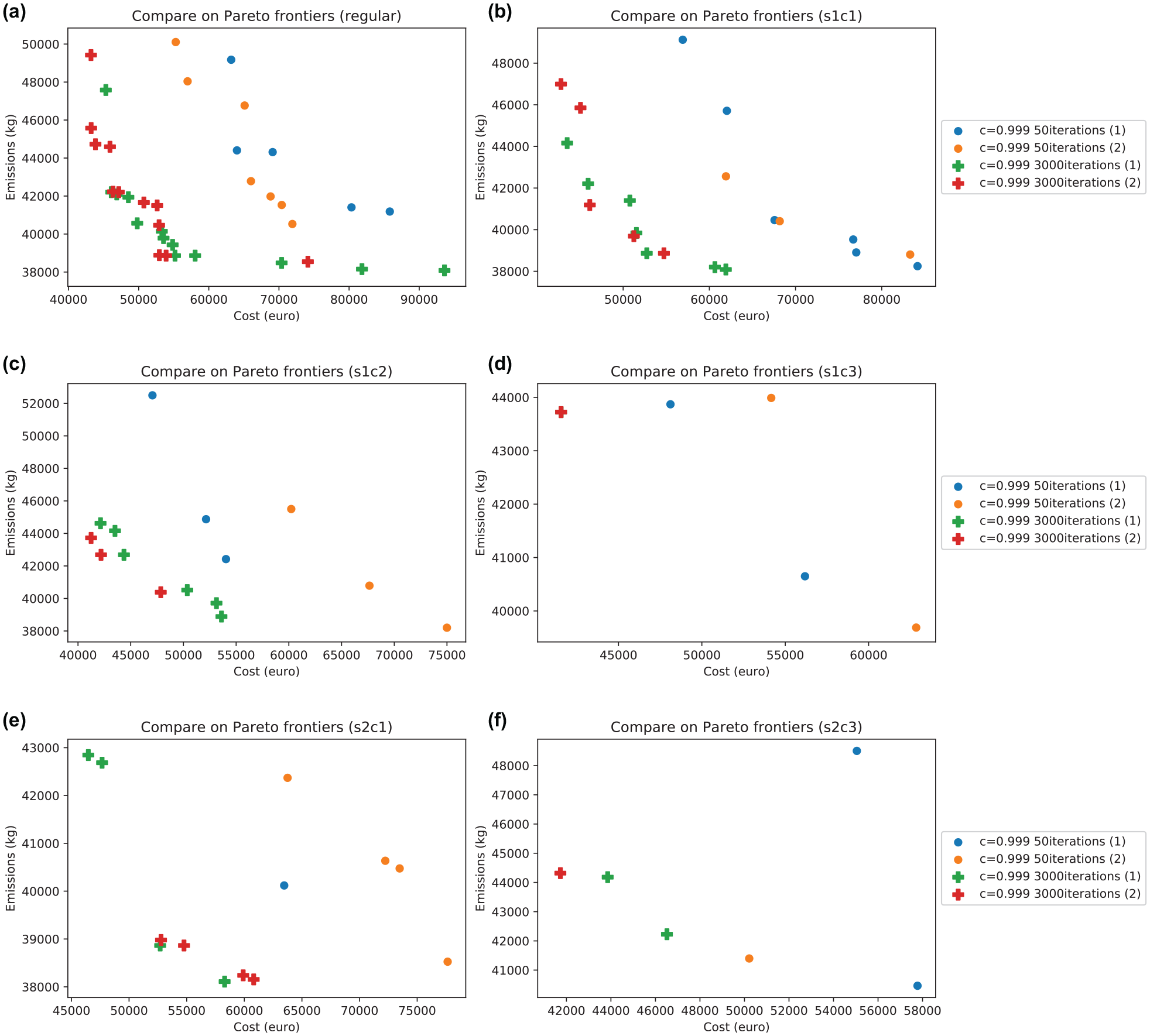
The results for one of the experiments with five vehicles, 10 requests, and 10,000 iterations of ALNS are given in Figure 6. In this experiment, the objectives include cost and emissions. The requests and vehicles are randomly generated, and in total 19 terminals are used. The regular Pareto frontier, that is, Pareto frontier without preferences, is shown in Figure 6a. The other five figures compare the Pareto frontiers under different weight intervals with the regular Pareto frontier. Figure 6b to 6d, show the results when the weight interval narrows down from [0.1, 0.9] to [0.33, 0.66]. As the weight interval narrows down, the relative importance of cost and emissions is similar for both and therefore the trade-off between the objectives is more obvious. Figure 6e and 6f, show two opposite situations. In Figure 6e, the DM prefers to reduce emissions. In contrast, the DM favors reducing cost in Figure 6f.
Pareto frontiers of bi-objective optimization: (a) regular Pareto frontier, (b) cost&emission: [0.1,0.9], (c) cost&emission: [0.25,0.75], (d) cost&emission: [0.33,0.66], (e) cost: [0.1,0.5], emission: [0.5,1.0], and (f) cost: [0.5,1.0], emission: [0.1,0.5].
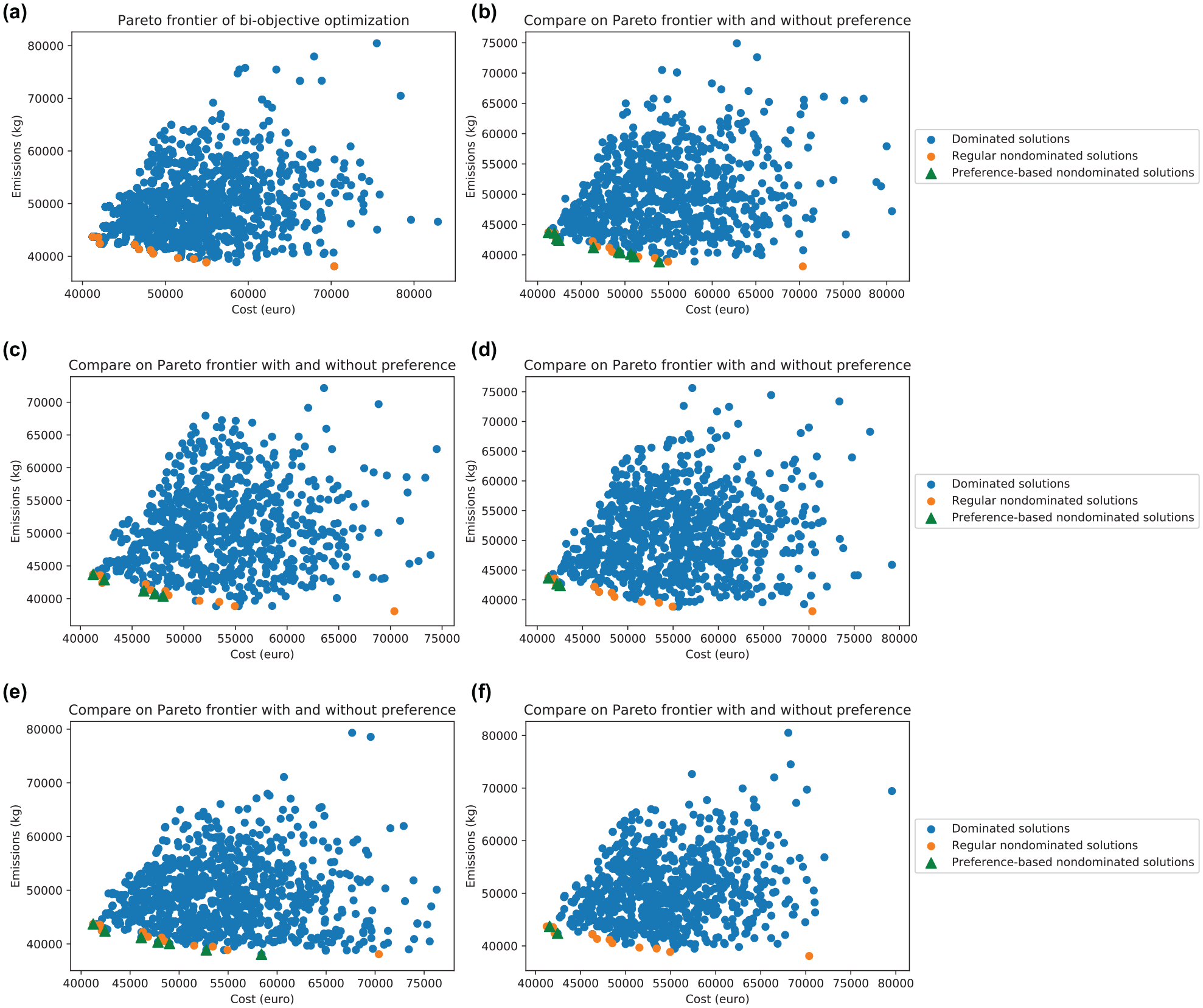
It is interesting to investigate the following research question: What mode/route will the DMs with different preferences choose? To answer this research question, a case study is designed and five terminals are used, including two seaports (Rotterdam and Antwerp) and three inland terminals (Duisburg, Worth, and Basel). The transport network information is obtained from Contargo company (https://www.contargo.net/). Almost all modes can run between all terminals except for one situation: there is no train between Rotterdam and Antwerp. Table 3 shows the vehicle and request information. To guarantee that all modes have a similar chance to serve requests, different modes have the same number of vehicles, and there is no time window because vehicle speeds are different. Three objectives are considered: cost, emissions, and time.
Vehicle and Request Information
In this case, 10 instances are generated from 10 requests, that is, the ith instance includes
Regular Non-Dominated Solutions and Mode Shares of Different Cases
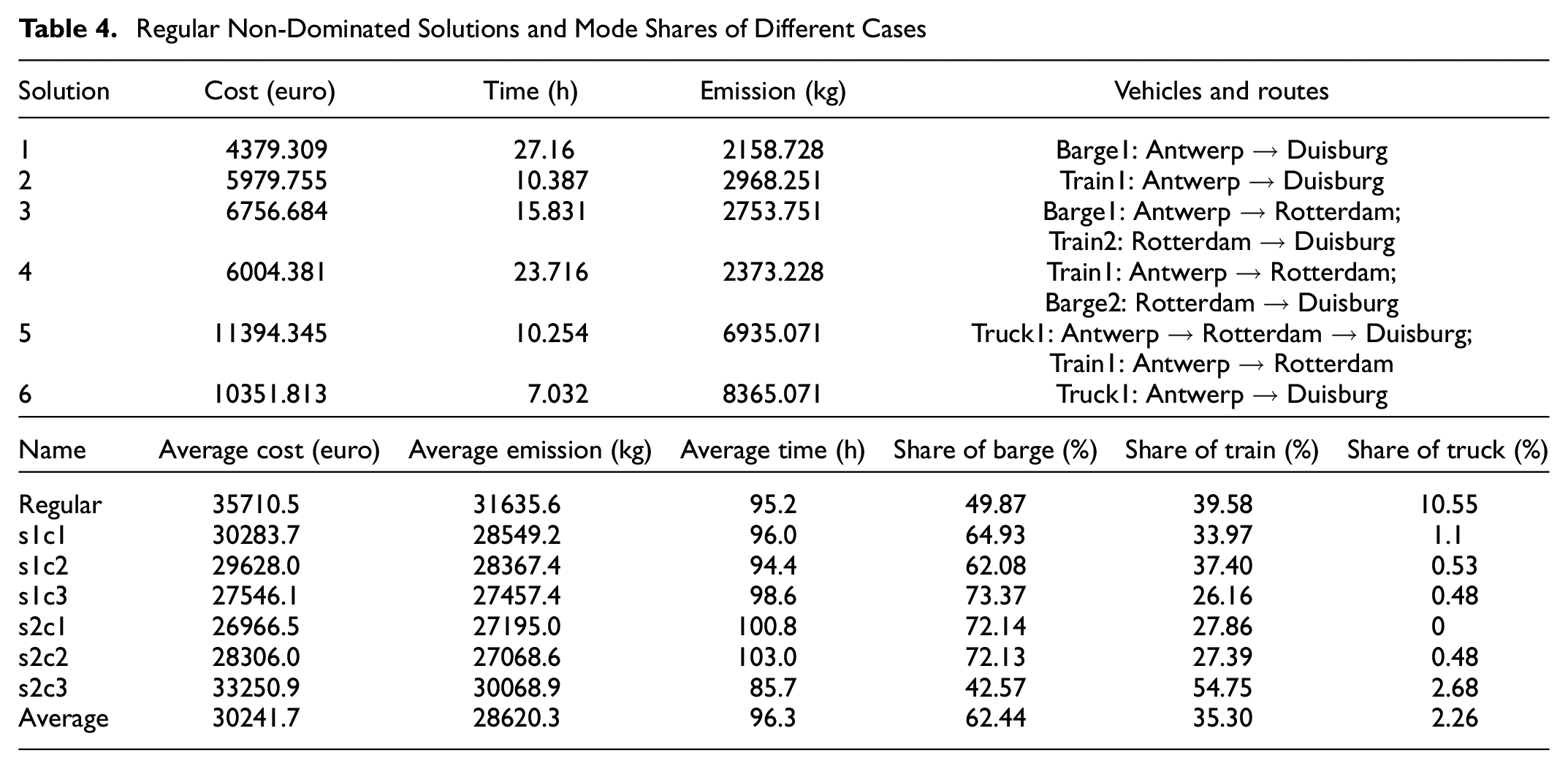
Besides the regular case, two scenarios (each scenario includes three cases) with preferences are designed. The weight intervals of three objectives in the first scenario are the same but narrow down from case s1c1 (meaning scenario 1 case 1) to s1c3. The weight intervals of s1c1, s1c2, and s1c3 are [0.1,0.9], [0.25,0.75], and [0.33,0.66], respectively. In the second scenario, each case prefers one objective. Cases s2c1, s2c2, and s2c3 prefer minimizing cost, emissions, and time, respectively. The weight interval of the preferred objective is [0.5,1.0], and weight intervals of the other two objectives are [0.1,0.5]. For example, the weight intervals of s2c1 are Cost: [0.5,1.0], Emission&Time: [0.1,0.5].
For each instance, there are seven cases and each case is repeated three times to obtain the average value. Therefore, a total of 210 experiments were performed. In each experiment, ALNS runs for 1,000 iterations and the computation time depends on instance size. For the instances with one request and 10 requests, the computation times are around 1 min and 15 min, respectively. The share of used modes is calculated for every case, as shown in the bottom part of Table 4. The results show that the solution tends to be better when the weight narrows down in the first scenario (s1c1, s1c2, and s1c3) as the cost, emissions, and time reduce. The share of the barge in s1c3 is larger than in s1c2 because s1c3 sacrifices time in exchange for better cost and emission, thus making the overall result better. In the second scenario, the minimum value of each objective is in line with preferences. The parameters used in this paper set the barge as having the lowest cost, emissions, and speed, and the truck is the fastest but has the highest cost and emissions. Therefore, the barge is used the most when costs or emissions are prioritized. Nevertheless, when time is minimized (s2c3) the train’s share becomes the highest because the barge speed is too low and truck’s cost and emissions are high. The results are sensitive to the cost, emissions, and time parameters. When the parameters change in reality, the share of modes may also change. In inland waterway transport, there are more uncertainties than other modes, such as long waiting times, lock/bridge open time, and changing water level. In the meantime, compared with other modes, there may be limited depth and inadequate air draft in inland waterway transport. Therefore, although the results in this paper show the advantages of barges and encourage DMs to choose barges, barges are not utilized as frequently in reality. The uncertainties and limitations of modes will be considered in the future to make the model more practical.
The proposed model is also compared with a recent paper ( 34 ), using the same instances. Guo et al. ( 34 ) solved a similar ST planning problem with us and minimized the transport cost, but they did not consider preferences. Guo et al. ( 34 )’s instances are based on a transport network operated by European Gateway Services, which contains 116 vehicles (49 barges, 33 trains, and 34 trucks) and 10 terminals (three deep-sea terminals and seven inland terminals, and all terminals could be used as transshipment terminals). In the following results, the same cost objective is used as in Guo et al. ( 34 ). Table 5 shows the results of instances with five, 10, 20, and 30 requests under two conflicting objectives, that is, minimizing cost and time. Under the same setting, the proposed model can find the same solution as Guo et al. ( 34 ), and the results are not repeated in Table 5. In instances with five and 10 requests, the transport cost is the same as in Guo et al. ( 34 ) when the DM prefers the cost objective because the latter solution dominates other solutions. In instances with 20 and 30 requests, the transport cost is slightly higher than in Guo et al. ( 34 ) and the transport time decreases because the transport time of that solution cannot satisfy the preferences on both cost and time objectives. When the DM prefers the Time objective, the transport time is reduced more, and the mode shares of trains and trucks increase. This comparison shows that the proposed methodology finds the optimal solutions when the objective is the same and that the solutions can be adapted to the preferences of the carrier with a multi-objective setting with preferences.
Comparison with Guo et al. ( 34 )
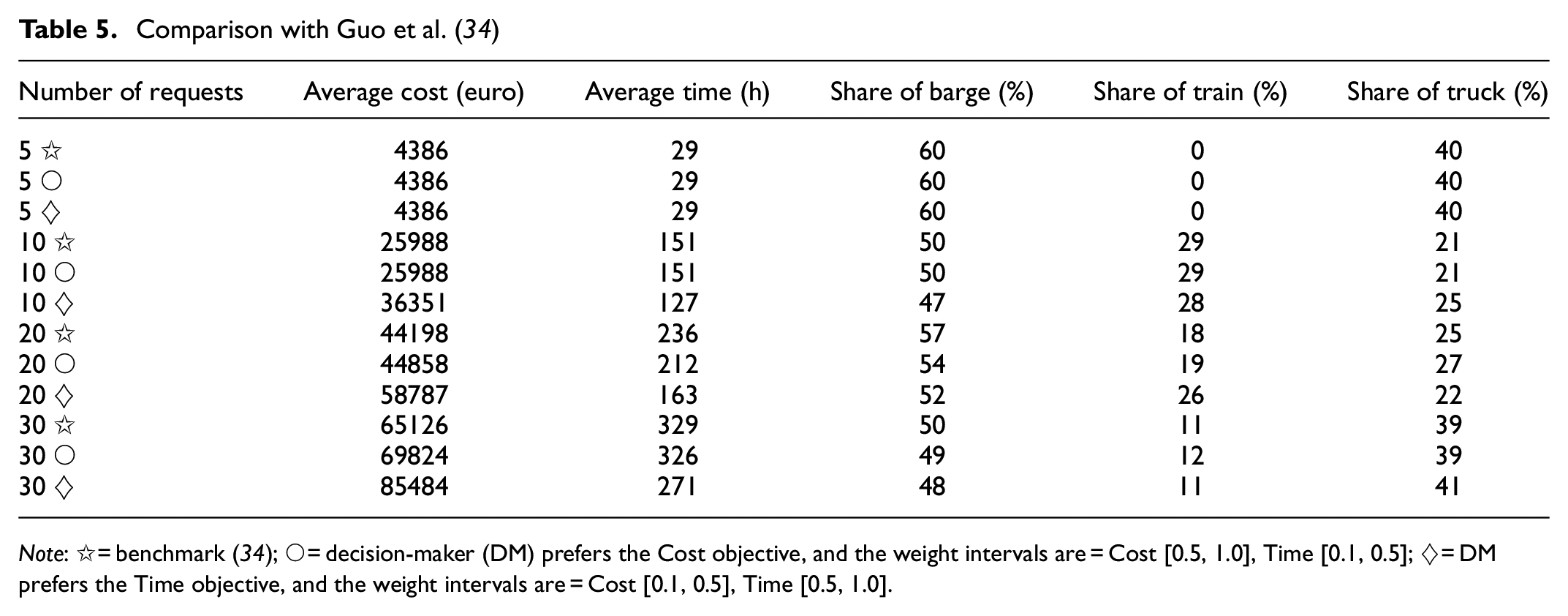
Note: ☆ = benchmark ( 34 ); ○ = decision-maker (DM) prefers the Cost objective, and the weight intervals are = Cost [0.5, 1.0], Time [0.1, 0.5]; ◇ = DM prefers the Time objective, and the weight intervals are = Cost [0.1, 0.5], Time [0.5, 1.0].
Conclusion and Future Studies
In this research, a preference-based MOO (PMOO) model is developed to address the conflicts among multiple objectives of carriers in ST. Compared with models in the literature ( 3 , 28 , 30 ), the contributions of this work are the considerations of vehicle routing, synchronization, and preferences in ST. The VRP is regarded as a PDPT, and both vehicle routing and container flow are modeled to achieve the transshipment in ST. Because of the requirements of ST, the synchronization between vehicles is considered, which makes the model more flexible. Based on the optimization model, which considers vehicle routing and synchronization, the weight interval is incorporated into ALNS to represent the vague preferences of DMs. The case study on the Rhine-Alpine corridor verified that the proposed model provides non-dominated solutions which reveal DM preferences. Under different preferences in this paper, the barge is the most popular transport mode because of its low cost and low emissions. When a DM prefers to minimize transport time, transport modes with higher speed are used more frequently. It is worth noticing that the mode used is dependent on the input parameters. When these parameters change in another instance, the mode share may be different.
The proposed model is able to target a selected part of the Pareto frontier based on a DM’s vague preferences. This is a significant advantage for carriers in ST because they can just enter their linguistic preferences and then obtain solutions which reveal their preferences. Using the proposed model, DMs do not need to struggle to solve conflicts between their objectives from many solutions with different modes and routes. Compared with MOO without preferences, this model not only reduces the number of alternatives but also chooses solutions which are preferred by DMs.
The proposed model can be encapsulated in a software application in the intermodal transport domain. DMs enter transport network information, requests, and preferences into the software and then they will obtain preferred solutions. The model is designed for intermodal container transport, but it can also be applied to other transport domains if the shipments are non-splittable, such as truck-load transport. Moreover, this work combined PMOO and PDPT in ST, which may be helpful for solving similar problems in the VRP domain.
Future research will focus on the following aspects:
A carrier usually transports containers for multiple shippers with heterogeneous preferences, such as low-cost, fast, sustainable, reliable, or low-risk transport. To improve the service quality and gain superiority in the business competition, the carrier needs to satisfy the expectations of shippers. Therefore, future research will study ST planning considering the heterogeneous preferences of shippers.
Collaborative planning among carriers is an interesting direction, which may reduce transport cost, time, and emissions. Shippers can also identify attractive bundles of requests and consolidate their cargo to help the carriers in reducing empty trips and making full use of the capacity of the vehicles ( 43 ). Conflicts between preferences also happen in collaborative planning among carriers and shippers. Therefore, the PMOO model for collaborative planning is a promising research direction.
Uncertainties are common in ST, such as delay (travel time uncertainty) and new requests from a spot market (demand uncertainty). Considering uncertainties in the proposed model is also an interesting direction. The current model assumes that all vehicles are available at their begin depot from time 0. In reality, vehicles are not always available because of travel time uncertainties, such as delay and bad weather. Therefore, an interesting future research direction is the incorporation of uncertainties both on the availability of the services and also on the demand side. For example, if serving a new request can make the DM more satisfied, the original plan can be changed.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Y. Zhang, B. Atasoy, R. R. Negenborn; data collection: Y. Zhang; analysis and interpretation of results: Y. Zhang, B. Atasoy; draft manuscript preparation: Y. Zhang, B. Atasoy. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the China Scholarship Council under Grant 201906950085 and the project “Complexity Methods for Predictive Synchromodality” (project 439.16.120) of the Netherlands Organization for Scientific Research (NWO). This research is also supported by the project “Novel inland waterway transport concepts for moving freight effectively (NOVIMOVE)”. This project has received funding from the European Union’s Horizon 2020 research and innovation program under grant agreement No 858508.