
Abstract
Background:
A stance-yielding mechanism for prosthetic knees may reduce lower limb loading during specific activities, but quantitative data are insufficient.
Objectives:
To clarify the biomechanical effect of a non-microprocessor-controlled stance-yielding mechanism on ramp descent for individuals with unilateral transfemoral amputation.
Study design:
Intra-subject intervention study.
Methods:
Seven individuals with unilateral transfemoral amputation underwent three-dimensional motion analysis of ramp descent with and without activating a stance-yielding mechanism. Regarding early-stance internal joint moment and ground reaction force, whole-group and subgroup analyses stratified by stance prosthetic knee flexion were performed to verify differences in prosthetic side and contralateral limb loading between conditions.
Results:
Whole-group analysis revealed significant reduction in early-stance prosthetic knee extension moment with stance-yielding mechanism activation. Changes in prosthetic side hip extension moment and contralateral limb loading were inconsistent between conditions. Subjects with prosthetic stance knee flexion walked slower with a smaller stride and greater increase in aft ground reaction force and ankle dorsiflexion moment when stance-yielding was activated.
Conclusion:
Stance-yielding mechanism has a biomechanical potential to decrease excessive knee hyperextension. However, prosthetic side stance knee flexion induced by the stance-yielding mechanism might not necessarily reduce the mechanical load on residual hip or contralateral lower limb joints.
Clinical relevance
This study showed individual variability in the possibility of reducing the load on the remaining lower limb when using a non-microprocessor-controlled stance-yielding knee. This suggests that individualized prosthetic management and monitoring the activities of individuals wearing a stance-yielding prosthetic knee are crucial to maximize the benefits of stance-yielding prosthetic knees.
Background
After transfemoral amputation (TFA), selecting a prosthetic knee suitable for each individual is one of the most important parts of prosthetic management. A wide variety of prosthetic knees is currently available, ranging from single-axis or polycentric knees with locking, and constant friction knee mechanisms to control swing and stance, to the use of microprocessor that regulates the damping characteristics of the knee joints. Functionalities, indications, total cost, and individual backgrounds must be considered when evaluating a person’s candidacy for each type of prosthetic knee.
Among the functionalities that current prosthetic knees can offer, stance-yielding, usually provided by a hydraulic cylinder, offers resistance to prosthetic knee flexion during stance phase loading, which helps activities that require a controlled lowering of the body center of mass, for example, sitting on a chair, 1 walking down a ramp,2,3 and stair descent. 4 An early type of hydraulic stance-yielding prosthetic knee was introduced in the 1960s, 5 and the latest stance control microprocessor knees usually employ a stance-yielding mechanism with enhanced safety6–8 by electric control.
Professionals have tried to establish a standard to determine the optimal type of prosthetic knee for each individual and to clarify the effects of each prosthetic knee compared with others. However, evidence-based guidelines and consensuses for selecting prosthetic knees are scarce. Growing attention has been given to establishing guidelines and recommendations for microprocessor knees.9,10 However, the biomechanical effects of stance-yielding itself, especially that provided by non-microprocessor-controlled knees, remain unclear. Stance-yielding theoretically enables stance knee flexion during walking when necessary, but the extent to which those with TFA wearing a non-microprocessor-controlled stance-yielding knee can use stance-yielding mechanisms during their activities differs clinically. The propagation effects of stance-yielding to adjacent joints, which can be evaluated by lower-limb joint moment and ground reaction, are important when considering the candidacy of stance-yielding knees. However, these effects are unclear; most previous motion analysis studies have mainly focused on the differences between stance-yielding knees with microprocessor controls 3 or on comparisons between those with TFA and a healthy population.1,11
Ramp descent is a demanding task for individuals with TFA because they have to control their prosthetic knee without active knee extensors. A previous motion analysis study reported that individuals with TFA generally reduce the hip flexion angle during ramp decent, which can result in a shorter step length and easier foot placement. 11 For those with TFA, prosthetic side hip extensors are important for voluntary control of the prosthetic limb.12,13 Hip extensors are known to have a capacity to extend the ipsilateral knee. 14 During ramp descent, it can be speculated, from a biomechanical viewpoint, that stance knee extension moment that is increased by a stance-yielding mechanism can reduce prosthetic side hip extension moment. Furthermore, controlled lowering of the body center of mass, achievable by stance prosthetic knee flexion, can alleviate the impact upon successive contralateral foot contact, resulting in reduced contralateral limb loading. However, the kinetic effects of a stance-yielding mechanism on ramp descent, especially for designs that do not incorporate microprocessor control, are unclear. Vrieling et al. 11 did not find a clear difference in the loading response of the prosthetic lower limb between one individual using a microprocessor-controlled knee compared to others using non-microprocessor-controlled knees during descent on a 3° ramp. Lura et al. 3 and Wolf et al. 2 have reported biomechanical differences during ramp descent between two microprocessor knees. Highsmith et al. 15 reported a better performance of ramp descent with the use of microprocessor knees compared to non-microprocessor knees using a scoring system. While these previous studies provide a biomechanical and clinical foundation for the utility of microprocessor-controlled knees, better understanding of the effects of stance-yielding would help differentiate the functions provided by stance-yielding prosthetic knees and by other prosthetic knees.
In this study, we investigated the whole-lower-limb kinetic effect of a mechanical stance-yielding mechanism on ramp descent performed by individuals with TFA. Quantitative information on limb loading, as evaluated by joint moment and ground reaction forces in relation to knee flexion resistance, would be helpful when considering the candidacy of individuals with TFA for hydraulic stance-control prosthetic knees. Based on the biomechanical speculation described above, we hypothesized that internal knee extension moment is reduced on the prosthetic side and that the mechanical load on the contralateral limb and the prosthetic side hip is reduced by activating a stance-yielding mechanism.
Methods
Seven individuals with unilateral TFA (Table 1) participated in our motion analysis study. All subjects had experience using a single-axis non-microprocessor-controlled stance-yielding prosthetic knee, were unrestricted community walkers who did not require upper-limb assistive devices for ambulation, and were free from gait disorders caused by pathologies other than amputation. The study was approved by the Institutional Review Board of the authors’ institute. Prior to measurement, written informed consent was obtained from all the subjects.
Subject characteristics.
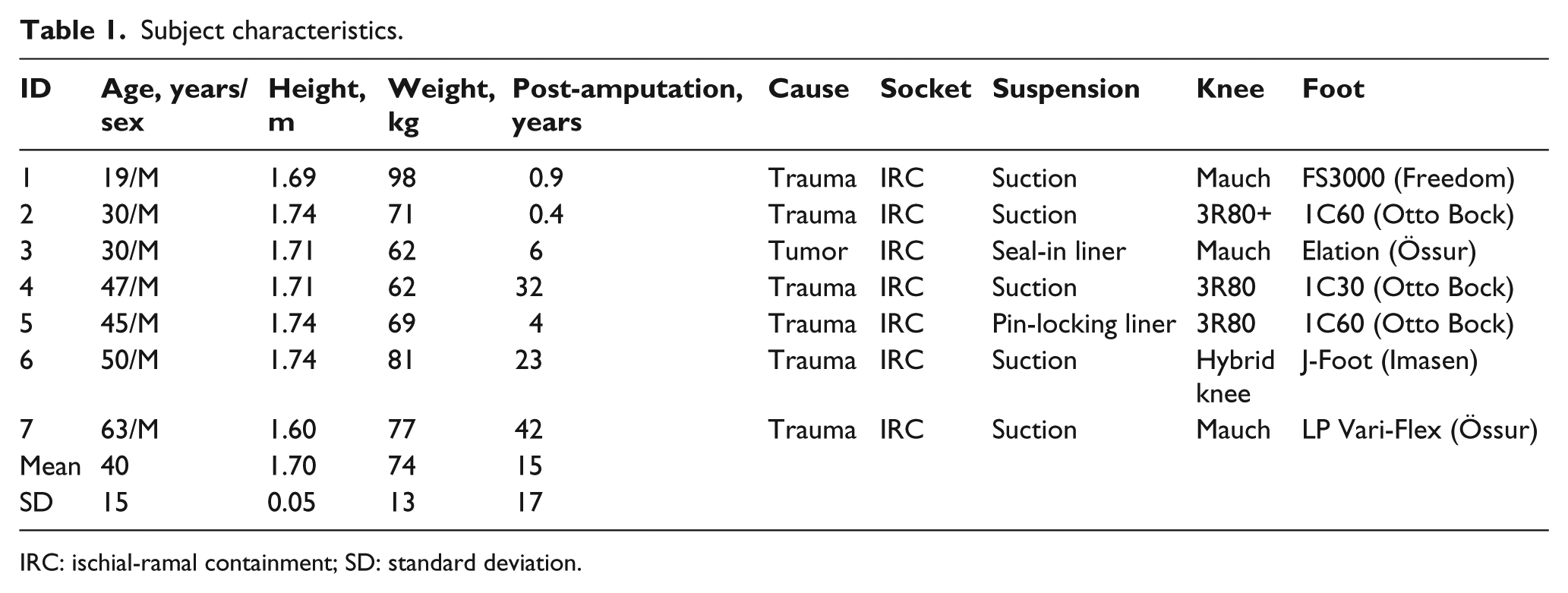
IRC: ischial-ramal containment; SD: standard deviation.
The subjects performed ramp descent with a self-selected, comfortable speed in two conditions: with activated stance-yielding (Activated condition) or with deactivated stance-yielding (Deactivated condition). Resistance to prosthetic knee flexion in the Activated condition was optimized by one of our certified prosthetists according to the subjects’ preference before performing the first trial under each condition. For the Deactivated condition, stance-yielding was switched off (i.e. turned into the swing only mode) for the Mauch knee (Össur, Reykjavík, Iceland) or was set to the minimum for the 3R80 knee (Ottobock, Duderstadt, Germany) or Hybrid knee (Nabtesco, Kobe, Japan) to eliminate engagement of the stance-yielding mechanism. The order of the conditions was randomized (Activated or Deactivated). The subjects practiced before the first measurement of each condition until they could walk safely and were comfortable with performance of ramp descent. The subjects were not masked to the conditions and were asked to use the stance-yielding mechanism in the Activated condition. Ramp descent was performed on a 10-segment experimental ramp placed on force plates (incline: 5° (8.75%), horizontal length: 3.9 m).
A total of 39 retroreflective markers were placed on the subjects according to the Plug-in Gait protocol (Vicon, Oxford, UK), with eight markers on the bilateral iliac crests, shoe tips, and the head of the first and fifth metatarsals for better body tracking. Motion data were collected using a 12-camera motion capture system (MAC3D, Motion Analysis, Natick, MA, USA) with 8 Kistler force plates via Cortex software (version 3.6, Motion Analysis). Three to five gait cycles for each side (prosthetic or contralateral) and condition (Activated or Deactivated) were used for kinematic and kinetic analysis; the number of trials per condition varied because of the availability of collected motion data with a clear foot strike on a single force plate after acceleration. Spatiotemporal parameters, joint angles, and joint moment were calculated for each gait cycle. Marker trajectories and kinetic outputs were filtered using a zero-lag Butterworth low-pass filter, with cut-off frequencies of 6 and 12 Hz, respectively.
Walking speed, stride length, and maximum values during early stance (i.e. 0%–50% of stance phase) for knee angle and lower limb joint moment, in addition to vertical and fore-aft ground reaction forces, are presented as mean (SD). To evaluate the effects of stance-yielding on lower limb mechanics, we compared the vertical and horizontal ground reaction forces, maximum early-stance lower limb extension moment, bilaterally, and maximum early-stance knee flexion angles for the prosthetic side using a paired t-test. For variables with a non-normal distribution, based on the Shapiro–Wilk test (p < 0.05), a Wilcoxon’s signed rank test was used for comparison between conditions. Statistical significance was set at 0.05 and adjusted using Holm’s correction for two comparisons (prosthetic and contralateral side) for each variable. Post hoc subgroup analysis stratified by the presence of stance prosthetic knee flexion during the Activated condition (>3° increase from the Deactivated condition) was planned because using a stance-yielding mechanism is demanding for some users, and we anticipated individual variability in their response to activation of the stance-yielding mechanism. We qualitatively evaluated the effects of the stance prosthetic knee flexion induced by the prosthetic knee by the stratified within-subject changes in the outcome variables. Data processing, statistical analysis, and visualization were performed using Visual3D, MATLAB (version 2012a, MathWorks, Natick, MA, USA) and R (version 3.2.4, R Development Core Team).
Results
The mean (SD) walking speed (Deactivated vs Activated: 1.1 (0.3) m/s vs 1.1 (0.2) m/s) and stride length (1.2 (0.3) m vs 1.3 (0.2) m) were similar between the two conditions. Four of the seven subjects could flex their prosthetic knee during the early stance in the Activated condition (Figure 1).
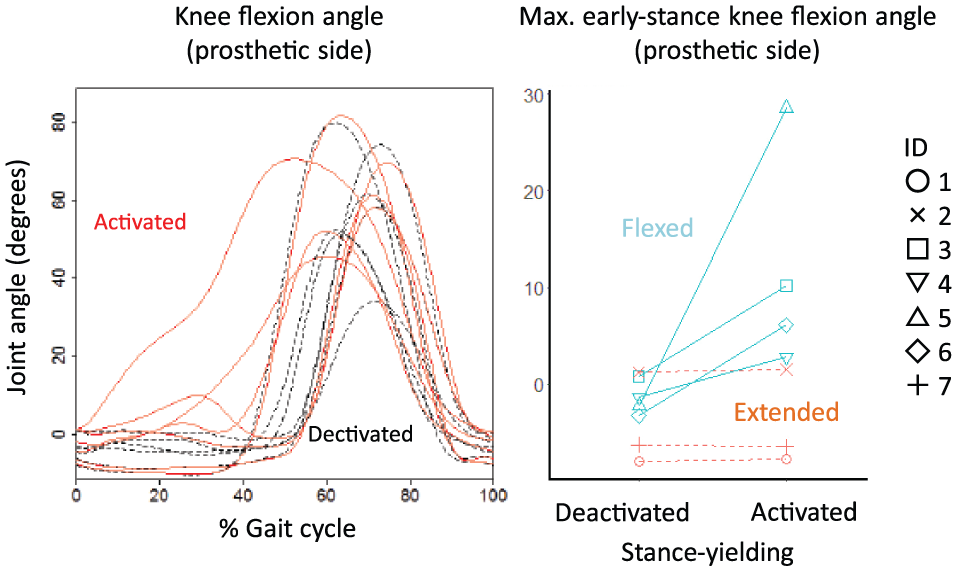
Prosthetic knee angle during ramp descent. (a) Joint angle trajectories during a gait cycle: solid lines indicate within-subject mean for the Activated condition, and dashed lines indicate within-subject mean for the Deactivated condition. (b) Within-subject difference in maximum prosthetic knee flexion during early stance between the conditions, stratified by the presence of stance prosthetic knee flexion. Solid lines indicate those who flexed the prosthetic knee (Flexed), and dashed lines indicate those who did not (Extended) in the Activated condition.
Prosthetic side and contralateral limb loading
The prosthetic side maximum vertical ground reaction during early stance was significantly greater in the Activated condition (Deactivated vs Activated: 1.13 (0.15) body weight vs 1.19 (0.15) body weight, p = 0.02, Table 2). No statistically significant difference could be detected in the prosthetic side hip moment, while a marginally statistical significance was found in the prosthetic ankle dorsiflexion moment (p = 0.05, Table 2). For the contralateral side, we could not detect any statistically significant difference in ground reaction forces or lower limb joint moment between the conditions (Table 2). Graphical data for kinetic variables during a gait cycle are provided in Supplementary Figure 1.
Whole-group summary of gait parameters during ramp descent (n = 7).
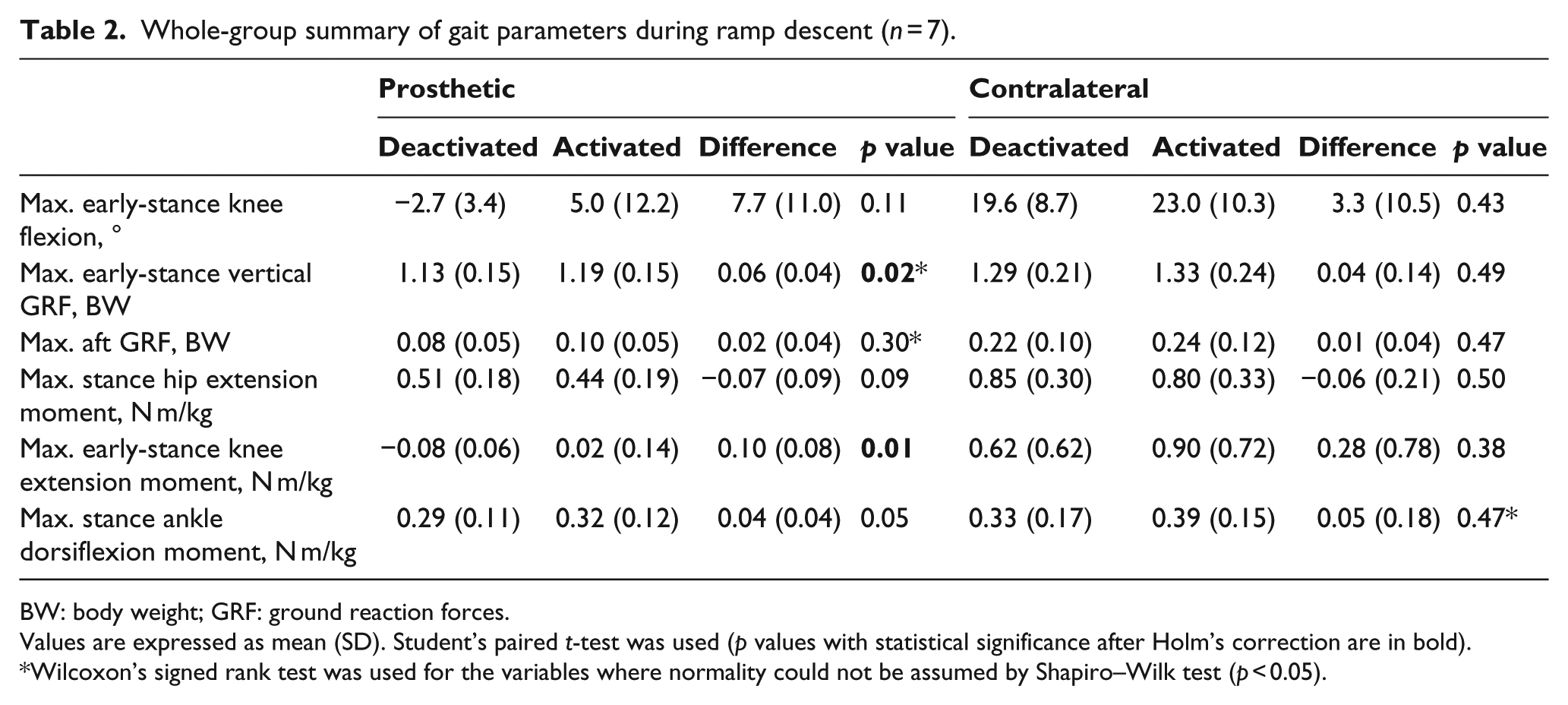
BW: body weight; GRF: ground reaction forces.
Values are expressed as mean (SD). Student’s paired t-test was used (p values with statistical significance after Holm’s correction are in bold).
Wilcoxon’s signed rank test was used for the variables where normality could not be assumed by Shapiro–Wilk test (p < 0.05).
Subgroup analysis
The subjects who could flex the prosthetic knee during early stance (Flexed, n = 4) tended to walk slower and with a smaller stride length than those who extended the prosthetic knee during early stance (Extended, n = 3; Flexed vs Extended: 1.0 (0.2) m/s vs 1.3 (0.2) m/s and 1.2 (0.2) m vs 1.4 (0.1) m in the Activated condition). In the Activated condition, Flexed subjects consistently increased prosthetic side ankle dorsiflexion moment and vertical and aft ground reaction forces during early stance, while Extended subjects consistently increased only the prosthetic side vertical ground reaction force (Figure 2). Maximum contralateral vertical ground reaction forces did not consistently change for either group (Figure 2) with a whole-group effect size of 0.29. Data plots for all early-stance loading parameters of interest are provided in Supplementary Figure 2.
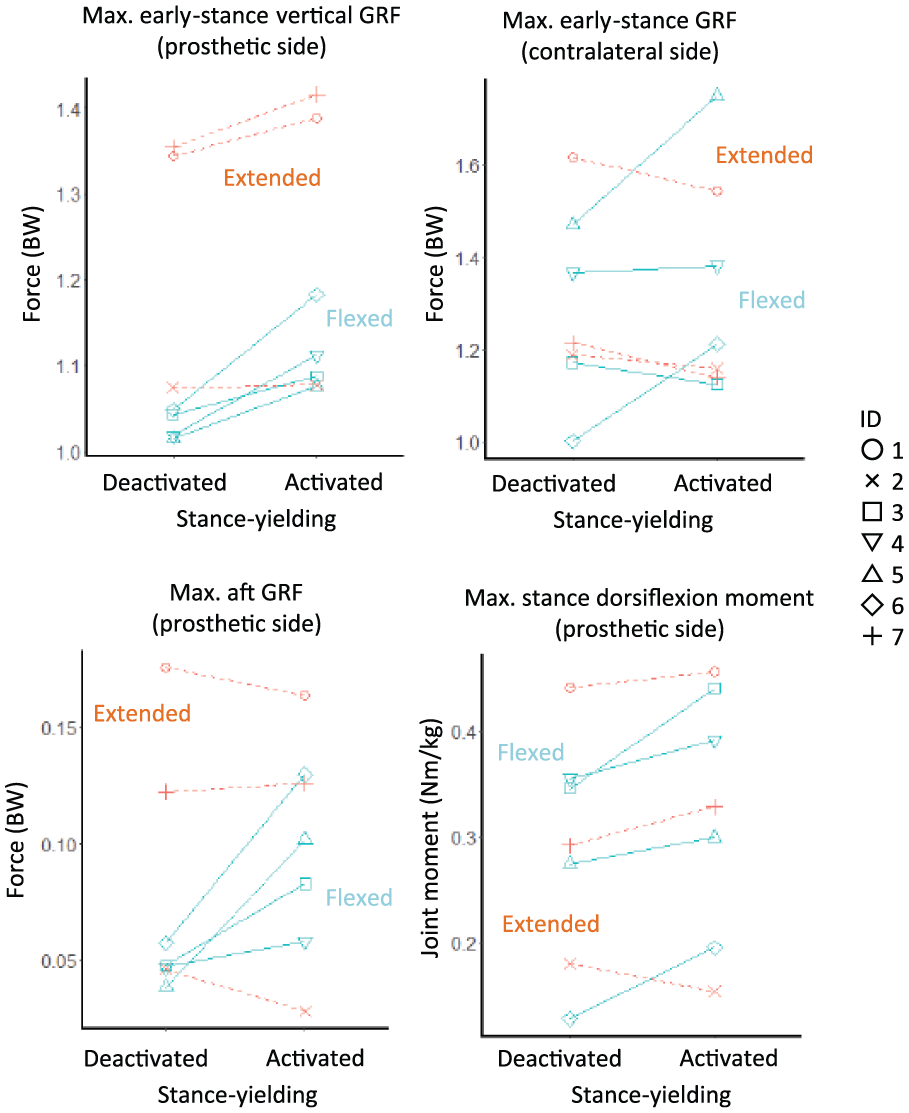
Prosthetic side and contralateral loading values. Solid lines indicate those who flexed the prosthetic knee during early stance (Flexed), and dashed lines indicate those who did not (Extended) in the Activated condition.
Discussion
In this study, we evaluated the biomechanical effects of non-microprocessor-controlled stance-yielding on ramp descent in individuals with TFA. Some statistically significant differences between the conditions were detected in prosthetic limb loading; however, the subjects did not uniformly respond to the activation of the stance-yielding mechanism, even after stratifying the subjects by the presence of stance prosthetic knee flexion. Although expected effects (i.e. reduced residual hip and contralateral limb loading) were found in some subjects, the results suggest clinically significant individual variability in response to the availability of stance-yielding during a 5° ramp descent.
Irrespective of the presence of stance prosthetic knee flexion, the subjects showed significantly increased prosthetic knee extension moment and prosthetic limb loading when the stance-yielding mechanism was activated (Table 2). These changes suggest that stance-yielding has psychological effects on prosthetic limb loading, which might reduce the effort required to stabilize the prosthetic knee during stance by the prosthetic side hip extensors. For Extended subjects, the increased prosthetic knee extension moment means reduced external knee hyperextension moment during the prosthetic stance. The increased prosthetic side vertical ground reaction indicated that the reduced hyperextension moment was not caused by reduced prosthetic limb support, but by the changed movement strategy. Stance prosthetic knee flexion during weight acceptance can be expected by activating a stance-yielding mechanism, which would help alleviate the loading asymmetry that is usually observed in individuals with TFA. 16 The observed mean increase of 6% body weight in the prosthetic side vertical ground reaction force, given the mean between-limb difference of 16% body weight in the Deactivated condition, can be clinically significant, although the minimum clinically important difference for ground reaction force parameters has not been established. We could not detect a statistically significant reduction in residual or contralateral joint moment or contralateral ground reaction by stance-yielding activation. This can be attributed not only to the small sample size but also to inter-subject variation in response to the activated stance-yielding mechanism.
We can speculate on the relationship between stance prosthetic knee flexion and lower limb kinetics when we inspect individual between-condition differences. Flexed subjects tended to walk slower with a shorter stride length in the Activated condition compared with Extended subjects. Owing to the small sample in each group (n < 5), these differences could not be statistically evaluated. However, we can consider that, biomechanically, descending the ramp with a shorter stride length accompanies reduced hip flexion angle upon contact. Assuming an inverted pendulum model for the stance phase, the hip extension velocity required will be reduced, given the slower walking speed and smaller hip flexion angle upon contact. This reduced hip extension velocity, in combination with the declined surface, would make it difficult to keep the prosthetic knee extended, and thus, the prosthetic knee would tend to be flexed by gravitational forces. Thus, slow walking with shorter strides can facilitate stance prosthetic knee flexion. A previous study 3 reported that observed differences in stance knee flexion between two microprocessor-controlled knees were speed-dependent, which also suggests the importance of considering the walking speed for controlling stance knee flexion. Manipulation of speed and stride length may affect the difficulty of using stance-yielding and, in turn, can be used as an accommodation exercise for the users of stance-yielding prosthetic knees. According to kinetic evaluation, Flexed subjects consistently show a greater increase in ankle dorsiflexion moment and aft force during the prosthetic early stance in the Activated condition. All prosthetic feet used in this study were rigid and had a limited range of motion. Prosthetic side ankle dorsiflexion moment can biomechanically induce prosthetic knee flexion after reaching maximal plantarflexion, which can induce stance knee flexion. Increased aft force indicates a posterior incline of ground reaction force, possibly associated with stance knee flexion on the prosthetic side.
From the inter-subject variability in responding to activation of the stance-yielding mechanism observed in this study, we stress the necessity of more systematic intervention for accommodating stance-yielding prosthetic knees. The necessity of prosthetic training for a prosthetic knee with advanced functionalities has been addressed on sitting 1 and walking with microprocessor knees, 17 and, in our opinion, it can also be applied to ramp decent using a prosthetic knee with a non-microprocessor-controlled stance-yielding mechanism. Intensive prosthetic rehabilitation to learn stance prosthetic knee flexion for daily activities (e.g. stand-to-sit, ramp and stair negotiation, and turning) would help users to maximize the capacity of stance-yielding prostheses. In addition, monitoring how the users utilize the stance-yielding function after prosthetic fitting would be important as post hoc evaluation of the candidacy.
The study has several limitations. A priori sample size determination considering statistical power was impossible because of the small population of accessible individuals who use a stance-yielding prosthetic knee. Although all subjects were unrestricted community walkers, important between-subject heterogeneity in characteristics, such as experience in prosthetic use, socket and suspension type, weight-activating resistance with rotary hydraulics (for the 3R80 and Hybrid knees), or non-weight-activating resistance with linear hydraulics (for the Mauch knee) of the prosthetic knees, could affect measured outcomes. Recruiting a sufficiently homogeneous sample for confirmatory analysis would not be realistic for this population, but further studies with a greater sample size and with other movement tasks would better define the benefits of a stance-yielding mechanism for individuals with TFA. In the field of clinical movement analysis for those with lower limb amputation, even studies with a smaller sample size have been able to yield clinically meaningful findings,1–4,7,11 possibly because biomechanically intuitive effects generally accompany a greater effect size. The current results suggest that a stance-yielding mechanism cannot alter the gait biomechanics of individuals with TFA as uniformly as surgical amputation, other types of change in prosthetic components, or changing walking speed. The experimental ramp used for this study was relatively shallow and short, which caused difficulties in generalization to other ramps with a different incline and completely steady-state descending, but we believe the current 5° decline was able to verify the ability to use a stance-yielding mechanism in active users of mechanical knees for evaluation purposes. We did not standardize the type of prosthetic foot or shoes used during the measurement. Although it is known that the rigidity of the prosthetic foot influences gait biomechanics, both clinically 13 and experimentally, 18 we selected to evaluate performance in a way that was similar to their daily lives. We did observe that one subject (ID6) who used a weight-activating stance-yielding knee (Table 1) walked with an adequate amount of prosthetic limb loading but without stance prosthetic knee flexion, with this pattern likely reflecting this individual’s use of shock-absorbing shoes, including soft a heel that deformed during weight acceptance. Thus, we stress the importance of considering not only the mechanical properties of prosthetic feet but also that of the shoes.
Conclusion
A stance-yielding mechanism has a biomechanical potential to decrease excessive knee hyperextension, regardless of the presence of stance knee flexion. However, prosthetic side stance knee flexion might not necessarily lead to reduced mechanical load on the ipsilateral hip or contralateral lower limb joints. Providing prosthetic training tailored for stance-yielding prosthetic knees, in addition to monitoring how the individuals utilize the prosthetic function in daily life, is essential to maximize the capacity of the prosthetic limb and to minimize the risk of secondary musculoskeletal disorders.
Supplemental Material
Supplementary_material_789453 – Supplemental material for Intra-individual biomechanical effects of a non-microprocessor-controlled stance-yielding prosthetic knee during ramp descent in persons with unilateral transfemoral amputation
Supplemental material, Supplementary_material_789453 for Intra-individual biomechanical effects of a non-microprocessor-controlled stance-yielding prosthetic knee during ramp descent in persons with unilateral transfemoral amputation by Yusuke Okita, Nobuya Yamasaki, Takashi Nakamura, Tomoki Mita, Tsutomu Kubo, Atsuko Mitsumoto and Toru Akune in Prosthetics and Orthotics International
Footnotes
Acknowledgements
Study concept and design: YO, NY, TN, TA; acquisition of data: YO, NY, TN, TK, TM, AM; analysis and interpretation of data: YO, NY, TN, TM, TK, AM; drafting of manuscript; YO, YN, TN; critical revision of manuscript for important intellectual content: TM, TK, AM, TA; obtaining funding: YO, NY, TN, TA.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Japan Society for the Promotion of Science (Grant/Award Number: JP16H7455).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.