
Abstract
Background:
The current method of prescribing composite running-specific energy-storing-and-returning feet is subjective and is based only on the amputee’s static body weight/mass.
Objectives:
The aim was to investigate their dynamic characteristics and create a relationship between these dynamic data and the prescription of foot.
Study Design:
Experimental Assessment.
Methods:
This article presents the modal analysis results of the full range of Össur Flex-Run™ running feet that are commercially available (1LO–9LO) using experimental modal analysis technique under a constant mass at 53 kg and boundary condition.
Results:
It was shown that both the undamped natural frequency and stiffness increase linearly from the lowest to the highest stiffness category of foot which allows for a more informed prescription of foot when tuning to a matched natural frequency. The low damping characteristics determined experimentally that ranged between 1.5% and 2.0% indicates that the feet require less input energy to maintain the steady-state cyclic motion before take-off from the ground. An analysis of the mode shapes also showed a unique design feature of these feet that is hypothesised to enhance their performance.
Conclusion:
A better understanding of dynamic characteristics of the feet can help tune the feet to the user’s requirements in promoting a better gait performance.
Clinical relevance
The dynamic data determined from this study are needed to better inform the amputees in predicting the natural frequency of the foot prescribed. The amputees can intuitively tune the cyclic body rhythm during walking or running to match with the natural frequency. This could eventually promote a better gait performance.
Keywords
Background
Sport prostheses are used by both upper and lower limb amputees while participating in sports and other physical activities. With advances in medicine and an emphasis on maintaining physical fitness, the population of athletes with impairments is growing and receiving great attention.1,2 This has revealed a considerable shift in the way our culture considers disabilities over the last few decades.3,4 Until the 1980s, most prosthetic feet were designed with the main objective of restoring basic walking ability and simple occupational tasks. 5 The need for higher performing feet has led designers to utilise lightweight and more advanced materials such as carbon fibre–reinforced plastic composite (CFRP). This has resulted in the development of a new generation of running-specific energy-storing-and-returning (ESR) feet, with unique shape and geometrical features. The running-specific ESR transforms potential energy (PE) into strain energy and returns it to the body mass in the form of kinetic energy (KE) in a short impulse, thus helping the amputee to accelerate in a forward motion. 6 Their introduction has changed the nature of amputee sprinting. Running-specific ESR feet are now available in many categories, in terms of their stiffness/performance, catering for most types of recreational activity.
The energy efficiency of running-specific ESR feet varies between different suppliers. Their energy return rates have been found to range from 31% 7 to as high as 95%.6,8 Studies of the biological/intact lower limb have found that the ankle can generate 241% energy return. 7 Hence, a running-specific ESR foot falls a long way short of replacing the mechanical performance of the biological limb. A closer examination of the dynamics of running-specific ESR feet identifies several parameters that are capable of affecting the performance of amputee runners when using these feet. These include the original shape, the length of the foot, the overall dynamic elastic response to impulse synchronisation and metabolic cost.
By definition, the dynamic characteristics of running-specific ESR feet are their natural frequency, mode shapes and damping factors.9–11 Although running with running-specific ESR feet is an impulse-driven action, the natural frequency of the spring–mass system plays an important role in facilitating the transition from vibration to impulse. Another factor affecting the performance of runners using running-specific ESR feet could be the excessive metabolic cost, especially due to lack of gait symmetry as observed in unilateral amputees. 12 The effect of each factor needs to be studied individually and its influence on motion can then be better understood.
Over the years, debates on the fairness of lower limb prosthesis running technology in sport were raised.13–15 To address this issue, research to investigate the static and dynamic characteristics of various prosthetic feet has been carried out. Lehmann et al. 16 conducted studies to evaluate the biomechanical and metabolic performance differences between two different prosthetic foot designs. This study used solid-ankle cushion-heel (SACH) prosthetic feet to test for dynamic elastic response. It was found that the natural frequencies of oscillation for the prosthetic feet were too high to provide energy storage and release that could be synchronised with the kinematic requirements. This finding is not unexpected as the feet used for this test were not designed to store and release a large amount of strain energy such as those made by Össur (Flex-Run) or Blatchford (BladeXT). Noroozi et al. 17 investigated the link between gait symmetry and the effect of dynamic elastic response of the running-specific ESR foot to impulse in unilateral and bilateral amputees. They hypothesised that human input impulse is needed in order to compensate for the loss of energy in one step. This impulse can only assist the motion if it is applied at the right moment and with a force trajectory that closely maps onto the foot. This phenomenon could potentially enhance performance if the foot is used at its optimum dynamic characteristics.
Aslani et al. 12 investigated the effect of the lack of symmetry on unilateral amputees due to dissimilar stiffness. The dissimilar gait associated with different energy return between the right and the left in unilateral amputees has caused excessive compensation needed in every step to control and avoid gait divergence. It was demonstrated in this study that energy consumption due to lack of gait symmetry is higher than that in symmetric gait and will cause severe fatigue over longer sprints, such as in 200- or 400-m sprints. It can be shown that an able-bodied individual having a symmetrical gait uses less energy than a unilateral amputee when walking.18–20 Oudenhoven et al. also indicated that the stiffness of the prosthesis is an important parameter to optimise running performance. With this information, the athletes can regulate the leg stiffness during distance running at their preferred step frequencies. 21 These findings imply that running efficiency/improved performance can be gained if the running gait can be made symmetrical. Therefore, knowledge of the dynamic characteristics of such feet is important to assist in developing a symmetrical running gait.
This article presents the modal analysis results of nine stiffness categories of Össur Flex-Run running-specific ESR feet in order to understand their dynamic characteristics (natural frequencies, damping and mode shapes). The effect of over- and underloading of the running-specific ESR foot on the natural frequencies is also presented.
The findings presented in this article are of importance as the data are not currently available elsewhere. These data are needed to better understand the role that dynamic characteristics of the foot play in the prescription of the prosthesis for walking or running in a better gait performance.
Methods
Össur Flex-Run
The Flex-Run is described as featuring a long toe lever and efficient energy return (https://www.ossur.com/prosthetic-solutions/products/sport-solutions/flex-run). The Össur Flex-Run is a running-specific ESR prosthetic foot that, due to the nature of its unique long toe design, produces a relatively long moment arm that causes bending with relative ease, hence storing a vast amount of strain energy that can be recovered at will. The shape is designed such that it allows easy matching of the foot lengths minimising any leg length discrepancies. This results in a more symmetric gait and more balanced loading between the left and right foot in late stance and also walking or running. What is noticeable about this running foot is its ability to give a more natural dynamics response, hence reducing the impact on other body joints. On a simple bouncing exercise, when the foot and mass are in free-free constraints, the foot reaction to normal/vertical impulse creates a forward bouncing motion known as active tibia progression which is almost similar to normal motion progression experienced in unaffected limb, especially when leaning forward while bouncing at a point. The benefit of this could be a more natural gait and reduced running effort.
The Flex-Run is offered in a range of stiffness values, divided into specified categories, and is prescribed according to the mass of the amputee through the stiffness prescription guide from Össur (Table 1). It should be noted that little or no consideration for the specific ability or desired activity level of the amputee is taken into account in the prescription guide.
Flex-Run stiffness prescription guide.
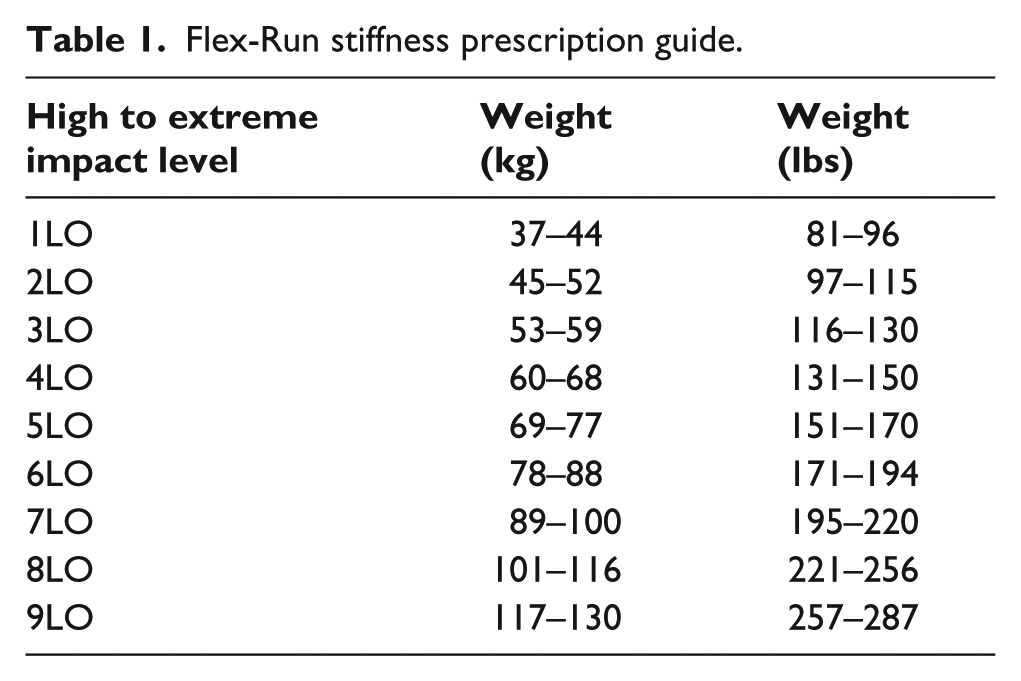
Due to the distinct difference in the stiffness of the feet, they will be distinguished by their rating names assigned by the manufacturer as 1LO–9LO.
Modal analysis
Modal analysis is a well-established experimental method for identifying modal parameters (natural frequency, mode shapes and damping) in any static elastic structure/system. The technique used to extract these parameters is called experimental modal analysis (EMA).22,23 When a system is excited by a cyclic excitation frequency which is matched or close to the natural frequency of the system, the system will deform similar to its corresponding mode shape. Each natural frequency will have its own distinct corresponding mode shape. They could be the bending modes, twisting modes and so on.
The test structure is artificially excited using either an impact hammer or one or more shakers. A force transducer is used to measure the input excitation force to the system, while the output response of the system is normally measured using accelerometers. Input and output vibration signals of several locations of the system are determined to obtain a discrete number of frequency response functions (FRFs). Then, the FRF obtained undergoes curve fitting to extract the modal frequencies, modal damping and residue mode shape of the system.24,25 Full EMA procedures involve four main steps, that is, determination of the system under testing with discrete measurement points, vibration apparatus set-up of EMA, data acquisition of the FRFs and post-data processing of modal parameter extraction.
Dynamic characteristics change if there are changes in geometrical properties, material properties and boundary condition of the system under testing. The changes in these three conditions are strongly related to the changes in mass and stiffness of the system. In this study, complete EMA investigations were conducted on nine Össur running-specific ESR feet. A constant mass of 53 kg was attached to each of the nine feet and EMA was conducted for every foot–mass system combination. For each test case, the mass was secured in such a way that the line of action of the total weight passed through the ground reaction point of the foot producing no turning moment, hence creating a balanced/state of equilibrium condition as shown in Figure 1. The free-free nature of the foot under static equilibrium prior to the tests was intentional to make the experiments safe to continue. The mass was secured in this position using three strings that were approximately at 120 degrees apart. The vertical nature of the system implied that there were zero or very little forces generated in these strings. The strings have enough slack in them to ensure that the displacement of the mass is not restricted in all three orthogonal directions. It must be noted that the forces in the strings do not affect the 1st bending modes of the vibration due to the fact that external forces on the mass and spring system do not affect the natural frequencies of the system. All of these could ensure symmetric loading and consistent alignment for all cases. A constant mass and boundary condition could ensure data accuracy and consistency. The natural frequencies obtained for all the feet could give a more accurate representation of the stiffness of each foot. Any change in natural frequency observed in different feet could then indicate the change of stiffness of the feet. From there, prescription based on the amputee’s desired body condition is feasible.
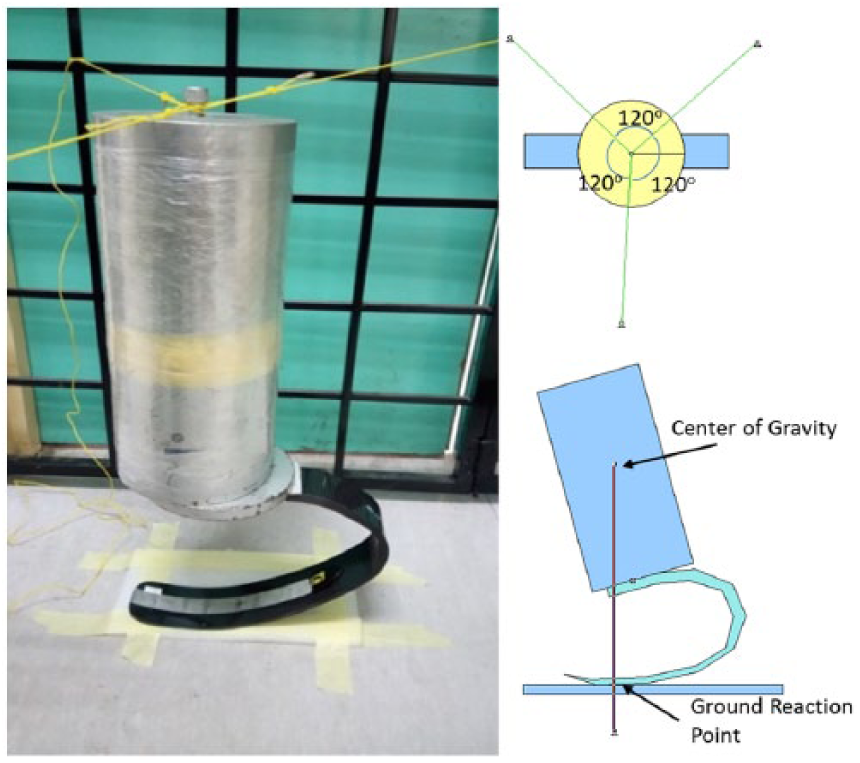
Experimental set-up of free-free modal testing.
A total of 18 discrete locations were selected on each foot to attach the accelerometers (Figure 2). The number and resolution of the points selected on each foot had to be detailed enough to fully define the geometry of the structure and describe the deformation of the foot due to vibration at each corresponding natural frequency. Selecting the right point is also essential to make sure that mounting of accelerometer is possible.
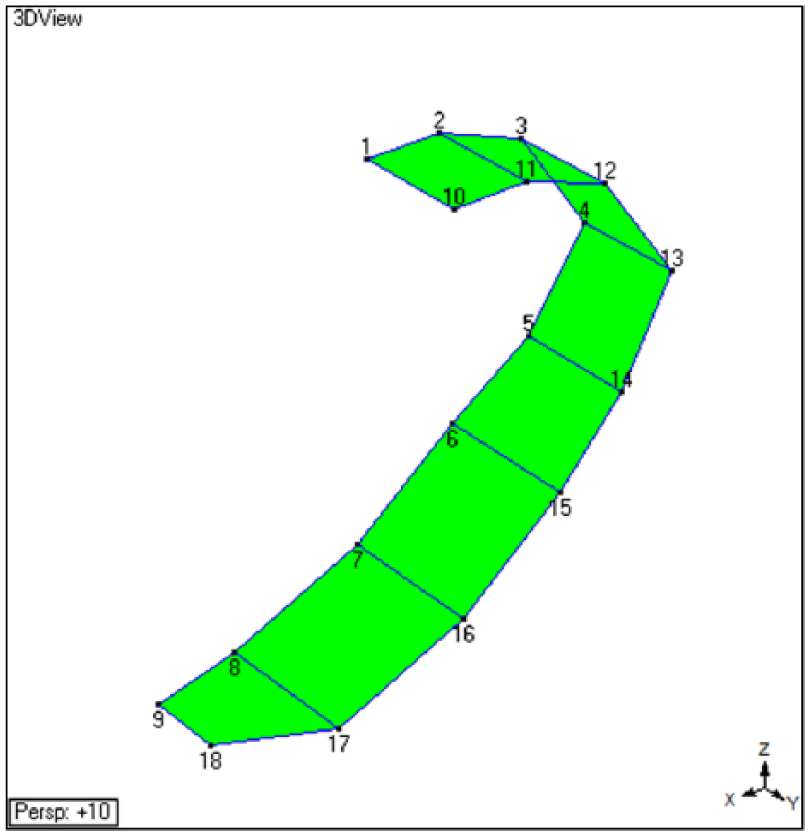
Wire mesh model of Flex-Run used for modal analysis.
The impulsive excitation technique was used as the test method throughout the study to determine the elastic and damping properties of the feet. 22 An impact hammer, a tri-axial accelerometer, an in-house data acquisition system and a modal analysis software were used to investigate the dynamic characteristics. The specification of the instrumentation used can be found in Table 2. The input signal was the excitation force from the manual impact hammer, whereas the output signal was the response due to the impact measured by the roving accelerometer.
Detailed instrumentation characteristics.
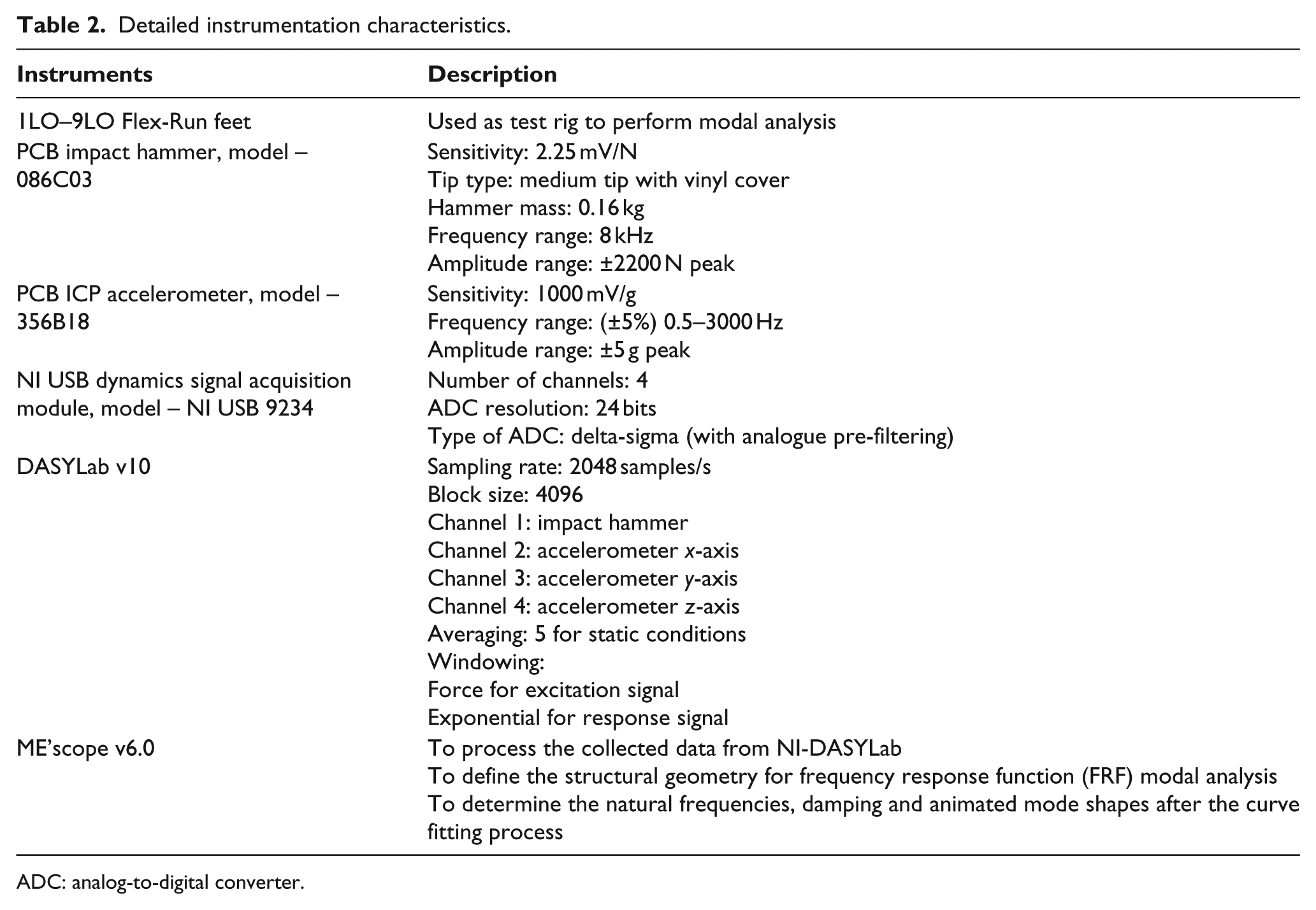
ADC: analog-to-digital converter.
A data acquisition (DAQ) system consisting of National Instrument (NI) USB-9234 modules and an in-house measurement system using virtual instrument software (DASYLab) was used. A manual impact hammer was connected to channel 1 of the NI dynamic analyser and a tri-axial accelerometer was connected to channels 2, 3 and 4, respectively. Sensitivities of the impact hammer and the tri-axial accelerometer were defined before making any measurement. In this experiment, a roving tri-axial accelerometer was used, while a manual impact hammer was excited at fixed degrees of freedom, that is, points 13 and 2 in the x- and z-axis, respectively. The tri-axial accelerometer was roved from point 1 to point 18 measuring the response of the structure in the X-, Y- and Z-direction, and this gave a single-input, single-output (SISO) analysis. A sampling rate of 2048 samples/s was used, and the vibration signal was collected for 2 s, so a total of 4096 samples were recorded for post-processing. A total of five readings for each measurement were collected to obtain a good average result. The modal analysis software (ME’scope) was used to draw the three-dimensional structural model of the test rig in coordinate points where every point was connected by straight lines as shown in Figure 2. The displayed point numbers represented each discrete location as in the actual running-specific ESR foot.
Furthermore, the FRF estimations acquired and processed through in-house data acquisition application program using DASYLab software were then post-processed using ME’scope software. A polynomial curve fitting method was used in the software to extract the modal parameters. Thus, the mode shape obtained corresponding to each vibration mode was recorded and animated using the wire mesh model drawn. Modal damping, 2σ, is approximately equal to the width of the resonance peak at 70.7% of the FRF peak magnitude value, which is the same as half the peak magnitude value squared. Hence, 2σ is the width at the half power point of a resonance peak in the unit of rad/s or Hz. The decay rate, σ, is commonly used to predict the drop in amplitude of the vibration per unit time. Using the decay rate makes it possible to calculate the percentage drop in amplitude with respect to the time elapsed.
It must be noted that damping exists in every real-life system. In this case, EMA extracts the damped natural frequency,

Using the damped natural frequency and damping obtained from EMA, the undamped natural frequency can be calculated from the damped natural frequency (equation (2))

where
Subsequently, the stiffness of each foot can be determined using the undamped natural frequency under a constant mass of 53 kg (equation (3))

where k is the stiffness (N/m) and m is the mass (kg).
The damped natural frequency is converted to undamped natural frequency, ωo, using equation (2) and subsequently the stiffness of each foot could be determined using equation (3) under a fixed mass. One can use the determined stiffness of each foot with its respective weight to tune to a desired natural frequency that matches with their needs, that is, frequency of bouncing action for better gait performance.
Results
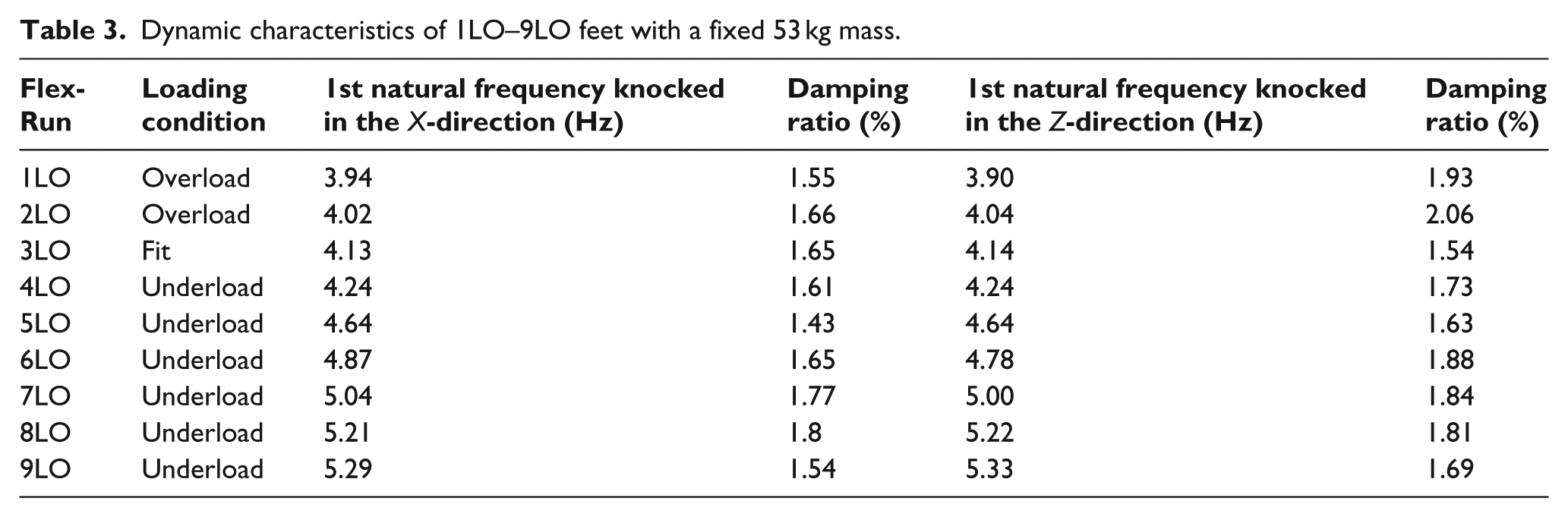
Table 3 presents the natural frequencies and damping of 1LO–9LO feet with a fixed 53-kg mass system. According to the manufacturer’s recommendation, as shown in Table 1, a 53-kg amputee is recommended to wear 3LO and is categorised as fit condition. Meanwhile, a 53 kg mass wearing the low-stiffness category feet (1LO and 2LO) is categorised as overload condition, whereas wearing the higher stiffness category feet above 3LO is considered as underload condition. The results show that each system possessed the same natural frequency when excited by knocks in the X- and Z-direction. This implies that all excitations in these two directions will always excite this natural frequency. The first natural frequency ranged from the minimum of 3.90 Hz to the maximum of 5.33 Hz for the 1LO–9LO feet and this indicates the overload or underload condition effect in changing the dynamic characteristics.
Dynamic characteristics of 1LO–9LO feet with a fixed 53 kg mass.
Although the first natural frequency varies across different stiffness categories of Flex-Run feet, the corresponding mode shape obtained is consistently the same, namely, the first bending mode. Figure 3 shows the first bending mode of 1LO at 3.94 and 3.90 Hz knocked in the X- and Z-direction, respectively. It indicates that the foot bends at its first-order mode which produces a forward leaping response when it is excited by a cyclic excitation frequency at its first natural frequency. The complete mode shapes of all Flex-Run feet are supplied separately as Supplemental Digital Content.
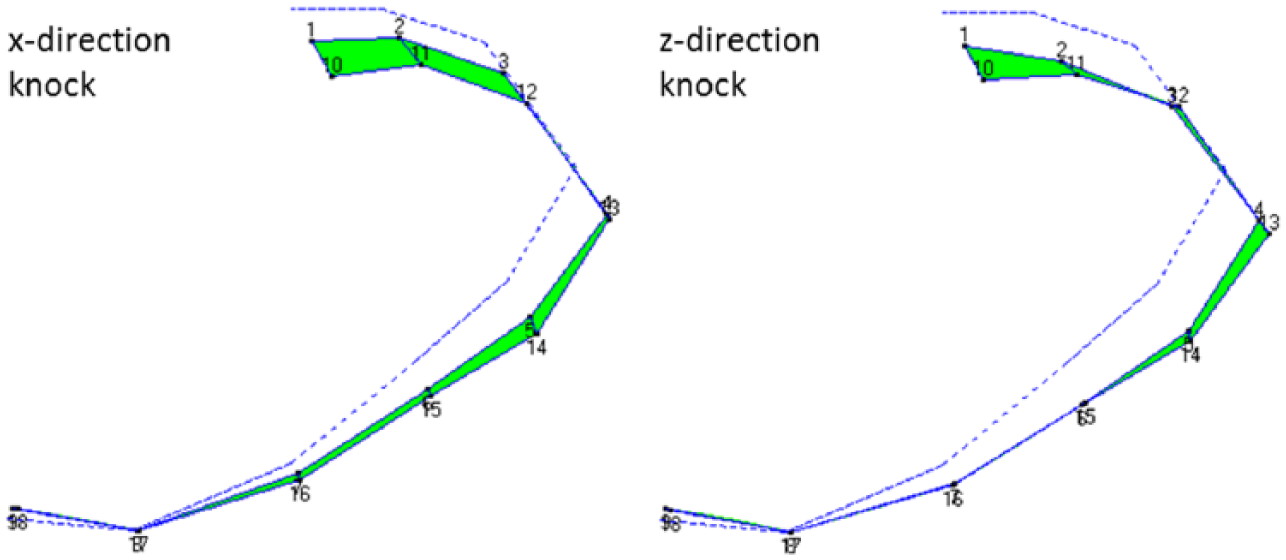
First bending mode of 1LO at 3.94 and 3.90 Hz with free-free boundary condition knocked in the X- and Z-direction, respectively.
Table 4 presents the averaged damped natural frequency obtained from two excitation directions. They are then converted to the undamped natural frequency and subsequently the stiffness of each foot using equations (1) and (2). The results show that both the undamped natural frequency and stiffness of the feet increase from the lowest stiffness category (1LO) to the highest stiffness category (9LO). The stiffness of each foot is determined and quantified.
Dynamic characteristics of 1LO–9LO based on a fixed 53 kg mass.
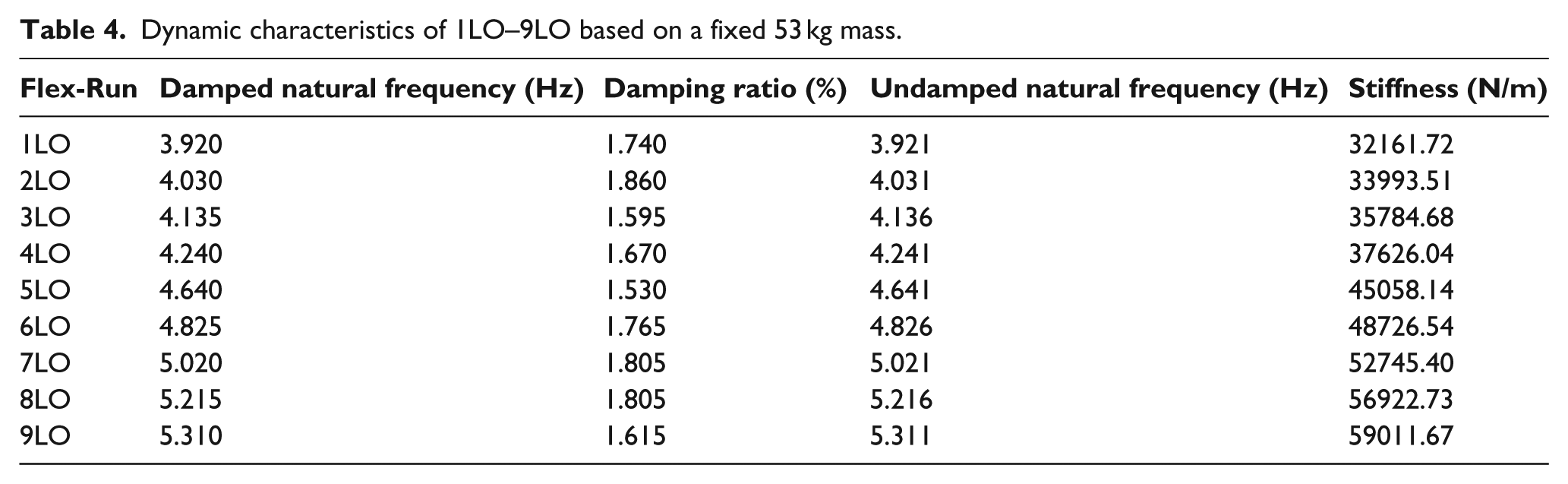
Figure 4 shows that, with the stiffness of the 1LO–9LO feet being known, and assuming that the boundary condition is fixed, natural frequency can be predicted based on different mass or masses to be used on a specific foot due to the linearity of the data. With the predicted natural frequency, one can either change to a different stiffness category foot to match the activity level or vice versa for better gait performance.
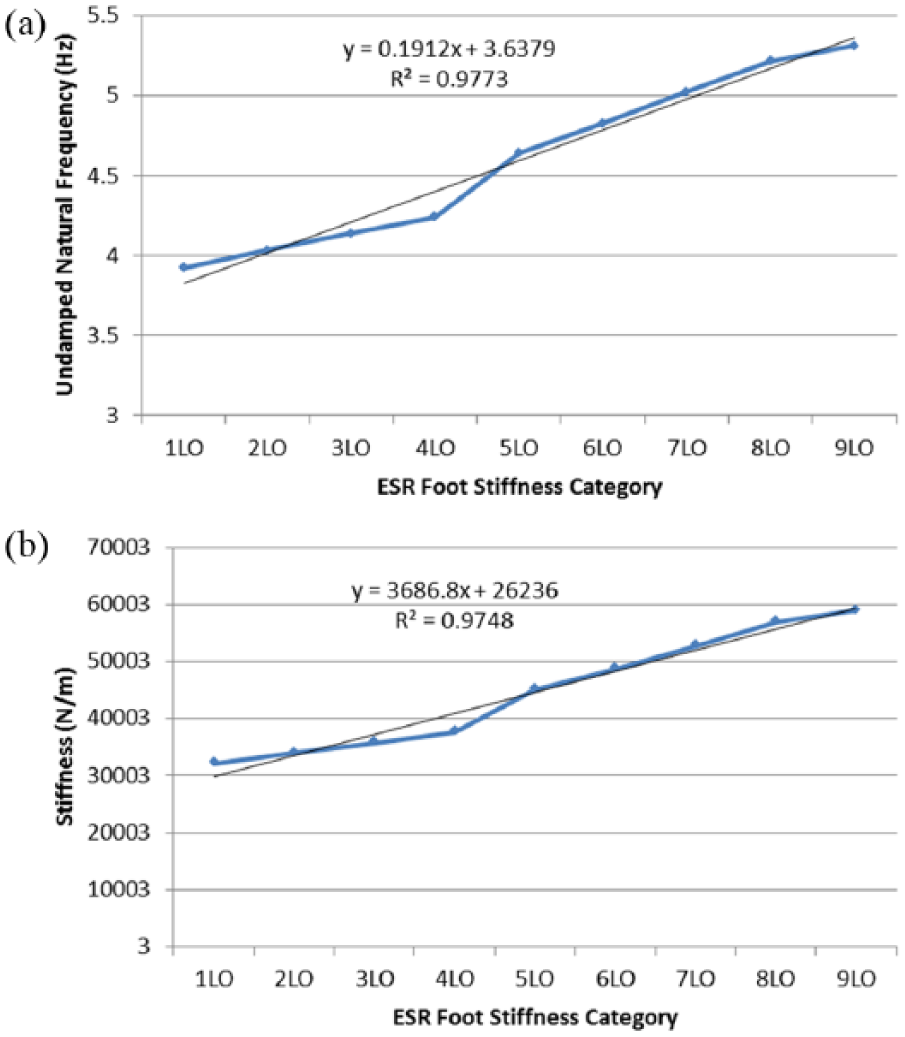
Plot of (a) undamped natural frequency (Hz) and (b) stiffness (N/m) against running-specific ESR foot stiffness category.
Discussion
The natural frequency results from Table 3 show that 1LO which is recommended for lightweight amputees has the lowest first natural frequency recorded at 3.9 Hz, while 9LO which is recommended for heavyweight amputees give higher first natural frequency at 5.33 Hz. This is close to the step frequency of the running gait for most elite unilateral trans-tibial amputee sprinters, which has been shown in previous research to reach 4.31 Hz on their unaffected leg during sprinting at top speed. 26 In summary, the natural frequency data obtained within the experimental set-up of this study are reasonable, realistic and within the frequency range of a real-life step frequency of amputee sprinters. In addition, the effect of overload and underload with varying the natural frequency could be utilised to match the user’s desired requirement for better gait performance.
From Table 4 and Figure 4, it is shown that the natural frequency–stiffness relationship of the feet is built. The natural frequency can be controlled either in underload or overload condition by simple adjustment of the stiffness when used with the same body mass or vice versa. One can tune a foot’s natural frequency to match the frequency of the bouncing action of his or her preferences or tune his or her activity level in terms of the frequency of bouncing action to match the natural frequency of the foot. In the case of matched frequencies, the bouncing action is amplified with lesser effort and loss of energy preserving a more steady periodic motion and promoting better gait performance. In other words, the foot is not merely prescribed based on the weight of the amputees but based on the activity level of the amputees.
For example, a 53-kg amputee is recommended to wear 3LO based on his weight. From this study, the recommended bouncing action frequency is to go as close to its natural frequency which is 4.136 Hz to optimise the gait performance with lesser effort. If the person’s running frequency is said to be at 4.8 Hz, he or she will not get his or her optimum gait performance. The outcome of this study will recommend him or her either to tune down his running frequency to 4.136 Hz or to try 6LO which has a natural frequency of 4.826 Hz that is closer to the running frequency of 4.8 Hz, although in this case it is considered as underload based on the manufacturer’s recommendation.
Noroozi et al.9,11 also described the behaviour of this mass and foot system to be similar to a trampoline. To increase the amplitude of oscillation on trampoline without leaving the trampoline, the amplitude of the force needs to increase at the same frequency. This force can only be increased up to a point beyond which it overcomes the inertia of the system and body takes off. This happens when the energy supplied to the system due to muscle activity is more than the loss of energy in one cycle. The excess energy can be stored in the foot and transferred to mass in the form of PE due to extra gain in height. This is when the cyclic motion reverts to an impulse-driven periodic motion. This extra gain in height can be consciously maintained by the athlete by synchronising their effort (e.g. increased muscle activity, burning calories, etc.) with time step between each pulse. This results in a higher take-off velocity or higher KE of the system, due to its velocity, or higher PE accumulating in the mass of the system due to its position.
Similar to trampoline, different Össur running-specific ESR feet can be used with dissimilar masses (i.e. overload, fit, underload conditions) and user can easily adapt to its new dynamic characteristics. If a mass was capable of generating a cyclic force promoting a bouncing action and if the frequency of that action matches the natural frequency of the perceived mass/spring system, then the mass will resonate at higher amplitude. If the mass is now replaced by human, he or she is able to tune and match the predicted natural frequency with its own body rhythm. This cyclic rhythm is a form of energy input into the system that is needed to maintain this steady-state cyclic/periodic motion, by replacing the loss of energy in one cycle due to damping.
Damping is an important factor in this study. Damping data are not readily available for running-specific ESR feet. The damping characteristic in terms of the decay rate or damping ratio for a given system must be physically measured as it cannot be determined using simulation tools. The damping characteristics of the feet have been determined experimentally and the damping ratios of the first natural frequency were found to be low, ranging between 1.5% and 2.0%. This low damping reduces the energy dissipation in one cycle and thus indicates that less energy input into the foot is required to maintain the steady-state cyclic motion before take-off from the ground.
The first natural frequency ranges from 3.9 to 5.3 Hz for Flex-Run 1LO–9LO with the same corresponding mode shape, that is, first bending mode. This implies that when the foot is excited by a cyclic excitation frequency, that is, frequency of bouncing action that coincides or is close to the first natural frequency, the foot vibrates like the first bending mode shape due to the resonance effect. It was noticed during this investigation that the first bending mode of Flex-Run tested all possessed a unique geometrical characteristic that initiates or promotes a natural and perpetual forward leaping response as shown in Figure 4 and Supplemental Digital Content. This recoil motion during bounce could give the system a perpetual forward motion with lesser forward excitation force. In short, less effort is needed when this mode is excited. This important phenomenon, known as active tibia progression by Össur, could reduce the need to actively push the body forward to have a more natural gait and also reduces the running effort. Without further testing, it can only be hypothesised that this could be due to the special geometrical features of these Össur feet, where energy could be stored in the foot in one direction and released naturally in a different direction that is usually aligned with the direction of the run. In a bilateral amputee, this can have another significant effect, which is steady-state symmetric beat frequency that can enhance performance over longer distance runs. Further study of this phenomenon will be the subject of future publications.
Although modal analysis is a powerful tool, it is highly sensitive to the influence of other parameters such as changes in boundary conditions that can affect the dynamic response to excitation. This is a very important issue as, in a free-free modal testing, the boundary condition during modal testing changes due to foot flexure and alignment which will result in discrepancies in the dynamic characteristics obtained. This also implies that using these feet with anything other than strings to hold them in position, such as dedicated test rigs, will result in modal data that are not representative of the foot and mass system in isolation. This is because dissimilar material rigs with much higher stiffness will substantially change the boundary condition and the results will show the natural frequencies of the test rig instead of the foot and mass system. To ensure data accuracy and consistency, the mass is fixed at 53 kg and the boundary condition is kept constant for all the nine feet where the system is consistently secured with three strings at 120 degrees which keep the foot–mass system at equilibrium position to create a condition where the foot is at rest or equilibrium condition ensuring symmetric loading and consistent alignment for all the feet. In this case, a linear relation between the natural frequency and stiffness could be built and prescription based on the amputee’s desired body condition is feasible.
This article indirectly demonstrates that the dynamics of the elastic CFRP foot and the bending mode shapes also give an insight into the different properties of these feet, making Össur one of the favourite prosthetics among the amputee athletes. The pre-impregnated carbon fibres used during the constructions are predominantly unidirectional with ply dropping off as one, moving from the shank or column towards the toe. Closer inspection shows that some +/–45 woven fabrics are also incorporated in the design especially on the top and bottom surfaces of the feet to give good overall properties. It is noted that, to take the high bending load applied, the majority of the volume must be taken by the unidirectional fibres. However, due to restriction on access to classified commercial data, there is no information on the exact number of layers, the type of carbon and resin, manufacturing and curing specification when using autoclave and so on, which makes further investigation on the feet properties not possible.
Conclusion
Nine Össur Flex-Run feet, constituting the full range of feet that are commercially available (i.e. 1LO–9LO), were investigated and the dynamic characteristic results, that is, natural frequency, damping and mode shape, were presented. Currently, no such data are available regarding these feet and the influence of mass, stiffness and natural frequency is not properly understood.
This article experimentally determines and quantifies the stiffness of all of these feet. This information is needed in order to better predict how the dynamic data can influence the gait pattern and symmetric transition from walking to running. It is understood that in promoting a better gait performance the prescription of foot shall not be merely based on the weight of the amputees but it could depend on the activity level, that is, frequency of bouncing action of the amputees. The amputees can intuitively tune the cyclic body rhythm during walking or running to match with the foot natural frequency and this could promote a better gait performance.
From the first bending mode shape, it was also noticed that the Flex-Run possessed a unique geometrical characteristic that initiates or promotes a natural and perpetual forward leaping response without any forward excitation force when excited as its natural frequency. Further study of this phenomenon is warranted.
Supplemental Material
SUPPLEMENTAL_DIGITAL_CONTENT_MODE_SHAPES – Supplemental material for Dynamic characterisation of Össur Flex-Run prosthetic feet for a more informed prescription
Supplemental material, SUPPLEMENTAL_DIGITAL_CONTENT_MODE_SHAPES for Dynamic characterisation of Össur Flex-Run prosthetic feet for a more informed prescription by Siamak Noroozi, Zhi Chao Ong, Shin Yee Khoo, Navid Aslani and Philip Sewell in Prosthetics and Orthotics International
Footnotes
Acknowledgements
All authors contributed equally in the preparation of this manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: The authors wish to thank the Royal Academy of Engineering who sponsored this joint collaboration link between the universities. The authors would like to thank Ossur for their contribution and in-kind support that made this investigation possible. The authors also wish to acknowledge the financial support and advice given by Newton-Ungku Omar Fund: Mobility Grant (IF006-2016), Advanced Shock and Vibration Research (ASVR) Group and other project collaborators.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.