
Abstract
Everyday experiences suggest that a container, such as a box of chocolate sprinkles, can convey pertinent information about the nature of its content. Despite the familiarity of the experience, we do not know whether people can perceive the number of objects in the container from touch alone and how accurately they can do so. In three experiments, participants handled containers holding between one and five objects and verbally estimated their number. Containers were small cardboard jewelry boxes, and objects were round beads of varying diameter and weight. Any useful visual and auditory cues were precluded. Experiment 1 demonstrated very accurate performance, provided the objects were of sufficient weight. Experiment 2 demonstrated that withholding information about the possible number of objects inside the container does not affect accuracy at a group level but does produce occasional overestimations at an individual level. Experiment 3 demonstrated that removing the weight cue leads to systematic underestimations but does not eliminate people's ability to distinguish between different numbers of objects in the container. This study contributes to a growing picture that container haptics is surprisingly capable.
Humans are highly adept at gaining behaviorally relevant information from their environment through the sense of touch or haptic perception (Grunwald, 2008; Lederman & Klatzky, 2009). When handling an object, various stimuli impinge on the receptors in the skin, tendons, and muscles; the stimulation, in turn, is a function of our movements and the inertial properties of the object (Ziat, 2023). Thus, to know about an object's weight, we can lift and wield it; to know about its materials properties, we can compress and bend it; to know about its shape and volume, we can enclose it in our hands (Carello & Turvey, 2017; Lederman & Klatzky, 1987).
But how good are our haptic faculties when what we want to know about is hidden from direct touch inside a container? Separating objects of interest from the haptic apparatus by means of a (nontransparent) container raises a number of questions. The most basic question would be whether a container can convey pertinent information related to its content. Everyday experiences suggest that it can; shaking a milk carton or a box of chocolate sprinkles allows for distinct impressions of how much content is left (e.g., Hirota & Sekiguchi, 2009; Koshiyama et al., 2015; Plaisier & Smeets, 2017; Tanaka & Hirota, 2012). A follow-up question would be how accurate those impressions are.
To date, very little data are available that can help address these questions, as there is surprisingly little research on “container haptics.” Only a handful of studies have investigated people's ability to extract information from a container's content. Moreover, these studies were concerned with quite different aspects of container contents: amounts of liquid, object motion, and numerosity. In this work, we focused on people's ability to estimate the number of objects in an opaque container based on only haptic cues.
Literature Review
Amounts of Liquid and Object Motion
Jansson et al. (2006) asked whether people could judge how much (in terms of deciliters) liquid and/or solid content there was in a milk carton. The liquid was water, while the solid was plywood with the same density as water. In one experiment, ten participants—having access to haptic information only—manipulated the carton in one of three ways. In the first condition, participants were to only use a (vertical) lifting motion; in the second, only a (horizontal) shaking motion; and in the third, both motions were allowed. In a fourth condition, participants were allowed to manipulate the container as they pleased and were allowed vision and hearing. Participants were quite accurate across all four conditions, demonstrating that they could use liquid-specific information to assess volume as well as discriminate between liquid and solid substances.
Yao and Hayward (2006) investigated whether participants could spontaneously perceive the location of a virtual ball rolling inside a handheld tube. When a ball rolls inside a tube, it produces several cues that could assist an observer in figuring out its motion. These cues are the mechanical noise during rolling, the jolts from an impact with an internal wall, and the intensity and timing of the jolts resulting from elastic bounces. Using haptic virtual reality technology, the researchers rendered two of these cues, the rolling vibration and the impact cue, to simulate three different rolled distances: 18, 24, or 60 cm. Eight participants reported their answers by pointing to one of three markings on the tube corresponding to those distances. Results showed that the virtual simulations provided sufficient information for the participants to perform the task with reasonable success. However, since the two conditions were administered in a between-subject experiment design, the experiment did not have a condition where the rolling vibration and the impact cue were available together, nor did it include the bounce cues.
Frissen et al. (2022) revisited the Yao and Hayward (2006) study to investigate how accurately people could estimate the rolled distance of a real ball inside a tube and what perceptual strategies might be at play with such an ability. Nine participants wielded a fiberglass tube containing a physical ball in one experiment. A set of tubes identical in length on the outside but with an internal wall hidden inside that would allow the ball to roll only so far. On any given trial, participants were handed a tube and asked to move it in a particular sequence (angle the tube down–up–down–up–down) and asked to indicate the final resting location of the ball (using a hair band that could be moved along the surface of the tube). Despite being a novel task, participants were remarkably apt at estimating the various rolling distances, albeit with a tendency to underestimate distance as distances increased. A follow-up experiment assessed the contribution of three constituent haptic cues produced by a rolling ball. Using the virtual reality technology introduced by Yao and Hayward (2006), the experiment suggested that the rolling noise was of primary importance and that while the impact cue was largely ineffective on its own, it contributed to the perception of the roll velocity.
Numerosity
People's ability to estimate quantities has long been the topic of scientific attention (e.g., Feigenson et al., 2004; Jevons, 1871). In a recent review of the related literature, Anobile et al. (2016) distinguish between three “ranges of numerosity perception.” The first, the subitizing range, is concerned with the estimation of small numbers (up to about four). Subitizing is very fast and tends to be errorless but also attentionally demanding. The second, the estimation range, is concerned with the estimation of numbers larger than about four. For these numbers, estimation, while still very fast, is prone to errors. At some point, numbers become too large to handle for the estimation processes, and it is suggested that a third range, texture-density, comes into play.
Subitizing has been demonstrated in vision (Katzin et al., 2019), hearing (e.g., Repp, 2007; ten Hoopen & Vos, 1979), and haptics. The haptic studies (without containers) produced subitizing ranges that varied from zero (Gallace et al., 2008), two (Cohen & Henik, 2016), three (Plaisier et al., 2009, 2010; Plaisier & Smeets, 2011; Riggs et al., 2006), and six (Plaisier et al., 2010). The large variety is likely partly due to a large array of methodological differences between the studies. For instance, physical stimuli could be passively received pressures (e.g., Riggs et al., 2006) or vibrations (e.g., Cohen & Henik, 2016) or could be received through active exploration (Plaisier et al., 2009). Moreover, while in most studies, stimuli would be received by the fingers, in one study, they were received across the body (Gallace et al., 2008).
As for container haptic studies, only two are related to numerosity perception (Plaisier & Smeets, 2017; Sekiguchi et al., 2005). Specifically, since both studies used between one and five objects, they are mainly associated with the subitizing range. However, the studies were not designed to demonstrate subitizing. Instead, they were designed to investigate whether people could estimate the number of objects in the container.
Sekiguchi et al. (2005) examined whether people can accurately discriminate the number of contained objects. They employed augmented reality techniques to present participants with a consecutive pair of physical boxes, each containing several virtual objects (between one and five, but never the same number in the pair). Five participants were asked to make perceptual discrimination about which of the two boxes contained the most objects. Discrimination performance was perfect (100%) when one of the boxes held only one object, and it was nearly perfect (96%) when one box held two objects, and the other box held more than two. Performance dropped when discriminating between three objects and four (92%) or five (80%) objects and went to chance level (56%) when discriminating between four and five objects. However, while performance was quite accurate, the task design does not allow us to conclude that participants accurately perceived the exact number of objects in the container, only that they could tell that there were different numbers of objects and base their responses on that judgment.
Plaisier and Smeets (2017) tested the idea that people can estimate an exact number of objects inside a box, provided that the number of objects is small enough. Seven participants were handed a small cardboard box containing one to five wooden spheres. They were allowed to handle it for five seconds, after which they were to estimate the number of spheres inside the box verbally. The task was performed under two conditions. In one condition, they received auditory and haptic information from handling the box; in another, they heard playbacks of auditory recordings from that handling. The results showed that participants could perform the perceptual task accurately when the number of objects was between one and three and that they tended to start underestimating their number when there were more than three. The main difference between the two conditions was that performance was considerably more variable in the auditory-only condition, which the authors attributed to cue integration processes (e.g., Ernst & Bülthoff, 2004). While suggestive, the study does not demonstrate that participants could have estimated the number of objects had they had only haptic information. Since participants were quite capable of doing the task from audio only, performance on the auditory-haptic condition could have been primarily driven by auditory processes, which have been shown to be capable (e.g., Repp, 2007; ten Hoopen & Vos, 1979).
Present Study
Between the relative perceptual discrimination task by Sekiguchi et al. (2005) and the missing haptic-only condition by Plaisier and Smeets (2017), we are still not in a position to confidently conclude whether participants can perceive the number of objects in the container from touch alone, and how accurately they can do so. We present the results of a descriptive study with three experiments to address these questions. The task was the same as in the Plaisier and Smeets study; participants were handed a small cardboard box containing between one and five objects, and their task was to estimate the number of objects verbally.
The first two experiments were very similar and differed only in the instruction to the participants about the number of objects that could be found in the containers. Whereas in the first experiment, participants were told there could be between one and five objects, in the second experiment, this information was omitted. The third experiment directly addressed the role of accumulated weight as a perceptual cue by experimentally equating the overall weight of all boxes irrespective of the number of objects they might contain.
All experiments were conducted at Bentley University and were approved by its Institutional Review Board.
Experiment 1
Method
Participants. Fifteen participants (seven females) were recruited from the Bentley University student body. Their average age was 28 (range, 22–44). They were paid US$10 for their time.
Materials. The containers were cardboard jewelry cases measuring 8 cm (L), 6 cm (W), and 3 cm (H). The content consisted of beads of three different sizes and weights; details can be found in Table 1.
Physical description of the container contents for Experiments 1 and 2.
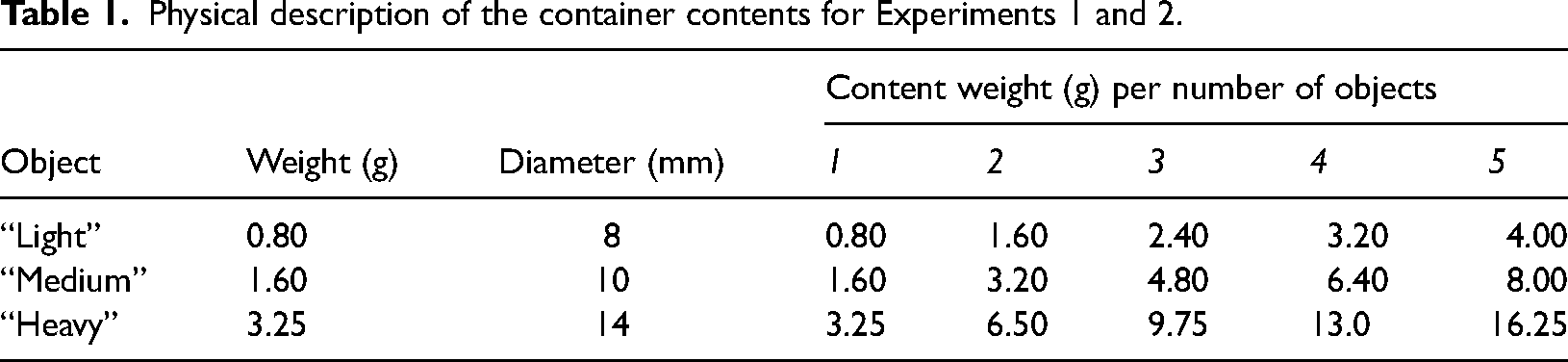
Design and Procedure. The experiment followed a 3 (Object Weight: 0.80 g (“Light”), 1.60 g (“Medium”), or 3.25 g (“Heavy”) × 5 (Number of Objects: 1–5) × 7 (Repetitions) within-participants design for a total of 105 trials per participant. Trials were blocked by Repetition, while the factors of Object Weight and Number of Objects were randomized within each Repetition.
Before starting the experiments, participants provided their written consent and were requested to use hand wipes to clean their hands. They were seated in front of a desk with the experimenter opposite. The containers were hidden from the participant's view on a surface under the desk. They were then instructed about the procedures of the experiment as follows: Today's session will consist of a single task; to tell us how many objects are contained in a small box. There will be between 1 and 5 beads in each box. You will test multiple boxes. […] For each box, please take 5 seconds to try and figure out how many objects there are in this box. You can move the box any way you like as long as the lid doesn’t come off and the objects don’t fall out. Within 5 seconds, please tell me verbally how many objects you think are in the box. If you are not sure, it is okay to guess.
For each trial, the experimenter placed a box on the desk for the participant to pick up. Participants were encouraged to use their preferred hand.
After the instruction, participants put on noise-canceling headphones (Bose QuietComfort 45) that played continuous white noise and were asked to adjust the volume to where they could no longer hear the experimenter without being uncomfortable. Responses were recorded in a spreadsheet by the experimenter for offline analysis. Occasional notes were taken to record spontaneous remarks by the participant or observations by the experimenter. There were no practice trials, nor feedback about response correctness.
Data analysis. Matlab (The MathWorks Inc., 2022) was used for data processing and visualization. Inferential statistical analyses were performed in JASP (JASP Team, 2023). Violations of sphericity were accounted for by using the Greenhouse–Geisser correction. For effect sizes, we reported generalized eta-squared values (Bakeman, 2005), and post-hoc comparisons used the Holm correction to counteract the effects of multiple comparisons.
Results and Discussion
The left panel of Figure 1 and the top row panels of Figure 2 plot the group and individual results, respectively. From the group-level results, it appears that the haptic system has a given capacity for solving the perceptual task. This observation was particularly true for the two heaviest objects, where performance was very accurate for up to four objects. However, performance with the lightest objects was less accurate in absolute terms. Specifically, while the monotonically increasing curve evinces that the numbers of objects were perceptually distinguishable, there was a systematic underestimation of that number.
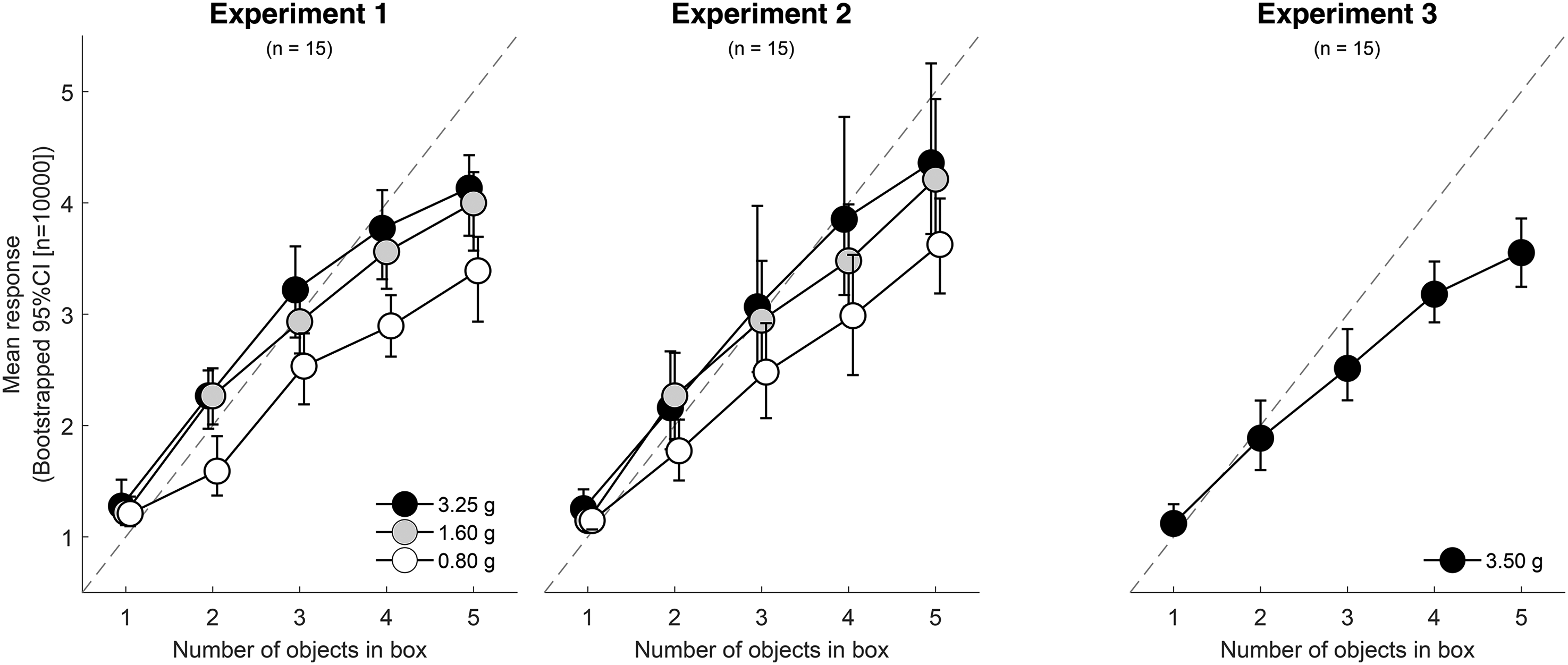
Mean estimated number of objects for all Experiments as a function of the true number of objects and by weight of the object. Error bars represent 95% empirical bootstrap confidence intervals based on 10,000 bootstrap samples.
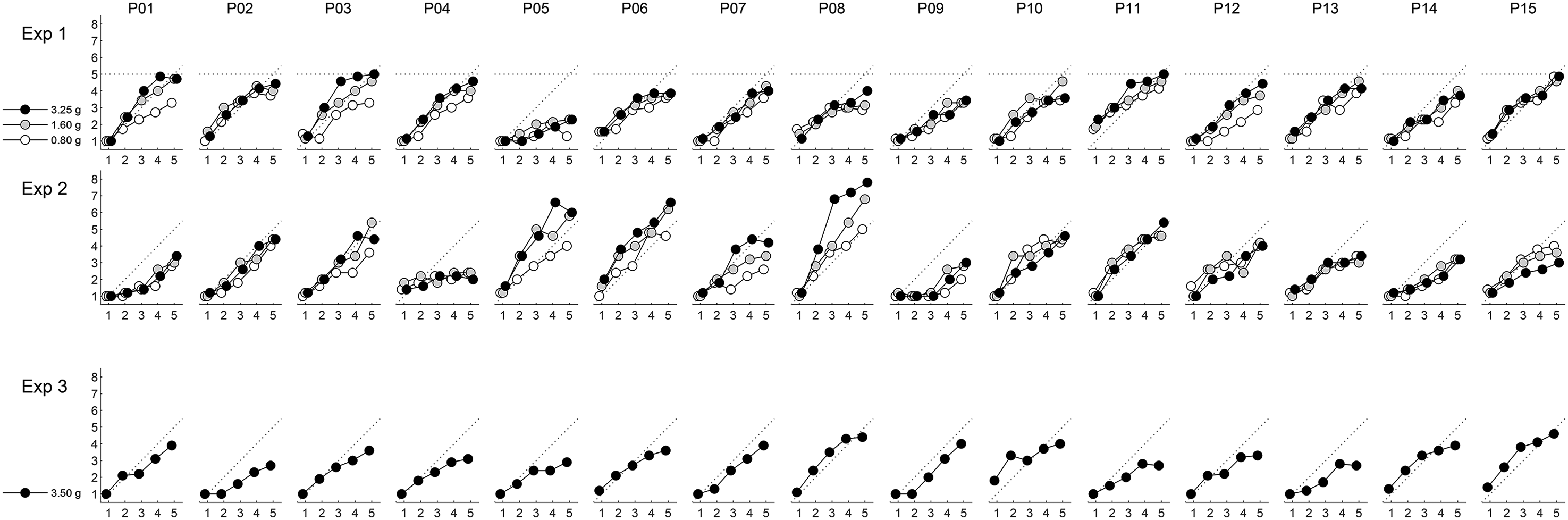
Individual mean estimated number of objects for all Experiments as a function of the true number of objects in the container. The horizontal dotted lines in the top row of panels (Experiment 1) represent the fact that the instructions to the participant explicitly mentioned that there could be a maximum of five objects in the containers.
This visual appreciation of the results was consistent with statistical analyses. Data were submitted to a 3 (Object Weight: Light, Medium, and Heavy) × 5 (Number of Objects) repeated measures ANOVA. The main effects of Object Weight (F(2,28) = 30.25, p < .001, η2 G = 0.170), Number of Objects (F(4,56) = 209.33, p < .001, η2G = 0.726), as well as their interaction (F(8,112 = 6.65, p < .001, η2 G = 0.048) were significant. The main effect of Object Weight was further examined in post-hoc comparisons. The difference between Light and Medium (M = −0.742, 95%CI = [−0.654; −0.291]) was significant (t = 7.06, p < .001, Cohen's d = −0.790, [−1.297; −0.283]) as was the difference between Light and Heavy (M = −0.610, [−0.887; −0.332], t = 5.96, p < .001, Cohen's d = −1.019, [−1.719; −0.319]). The difference between Medium and Heavy (M = −0.137, [−0.336; + 0.062]) produced a p-value of 0.082 (t = 1.88, Cohen's d = −0.229, [−0.582; + 0.123]). The significant interaction is attributed to the fact that as the number of objects increases the estimates with the Light object deviate increasingly more from the estimates with the Medium and Heavy objects.
The results suggest that, even without training, participants could determine the number of objects in the container with considerable accuracy. This finding extends those by Plaisier and Smeets (2017) to conditions in which only haptic information is available. They also further extend the repertoire of accurate abilities of haptic (container) perception. Nevertheless, performance does appear to be dependent on the weight of the objects in two particular ways.
First, estimates were highly accurate for performance with the two heaviest objects, up to four objects but dropped with five objects. This pattern of underestimation is reminiscent of those observed in the container haptics literature summarized earlier. It may be attributable to the commonly observed low number capacity of subitizing, or to other, as of yet unknown limitations of the haptic perceptual systems. However, the cause may also be methodological. One significant difference in procedure between Experiment 1 and the Plaisier and Smeets (2017) study is that the latter did not provide the participants with any information about how many objects could be in the box. The presence of this information in the instructions for Experiment 1 may have introduced a situation in which there was a conflict between what participants were allowed to report and what they actually perceived. This possibility is considered in Experiment 2.
Second, performance with the lightest object, except when there was only one, revealed a systematic underestimation. Irrespective of the outcomes of Experiment 2, there remains the possibility that accumulated weight as the number of objects increases affords a salient perceptual cue. This possibility is considered in Experiment 3.
Experiment 2
Method
The experiment was the same as Experiment 1, with two minor exceptions. First, the reference to the number of possible objects in the instructions was omitted, and second, the number of repetitions was reduced from seven to five for a total of 75 trials per participant. Fifteen new participants (six females) were recruited from the same pool. Their average age was 26 (range, 20–34). They were paid US$10 for their time.
Results and Discussion
Group results. The results of Experiment 2 are shown in the middle panel of Figure 1. Visual inspection suggests that, on average, performance was virtually identical to Experiment 1. Accordingly, a 3 (Object Weight: Light, Medium, and Heavy) × 5 (Number of Objects) repeated measures ANOVA produced the same pattern of significant and non-significant effects as it did for Experiment 1. The main effects of Object Weight (F(2,28) = 5.88, p < .01, η2 G = 0.051), Number of Objects (F(4,56) = 70.39, p < .001, η2 G = 0.513), as well as their interaction (F(8,112 = 2.70, p < .05, η2 G = 0.015) were significant. The difference between Light and Medium (M = −0.408, 95%CI = [−0.796; −0.020]) was significant (t = 2.68, p < .05, Cohen's d = −0.399, [−0.838; −0.039]) as was the difference between Light and Heavy (M = −0.536, [−0.924; −0.148], t = 3.52, p < .01, Cohen's d = −0.525, [−0.994; −0.055]). The difference between Medium and Heavy (M = −0.128, [−0.516; + 0.260]) produced a p-value of 0.408 (t = 0.839, Cohen's d = −0.125, [−0.521; + 0.271]). In a direct statistical comparison of Experiments 1 and 2, an additional 2 (Experiment) × 3 (Object Weight: Light, Medium, Heavy) × 5 (Number of Objects) mixed model ANOVA was conducted, with Experiment as a between-participants factor. None of the effects that included the Experiment factor were significant (all F's < 1), with only Object Weight (F(2,56) = 23.96, p < .001, η2 G = 0.084), Number of Objects (F(4,112) = 107.24, p < .001, η2 G = 0.593) and their interaction (F(8,224) = 7.36, p < .001, η2 G = 0.023) showing significant effects.
Thus, at the group level, it appears that there was, at best, a minor and statistically non-significant effect of instruction. However, there were visually appreciable differences in the confidence intervals, which are wider for Experiment 2, particularly for the two heavier objects. We attribute the difference to individual differences, which are discussed next.
Individual results. The middle row of panels in Figure 2 shows the individual results for Experiment 2. It is apparent that the change in instruction was associated with participants reporting numbers larger than five, particularly for the two heaviest objects. Indeed, we now recorded responses as large as ten. Figure 3 (left panel) shows the histograms calculated on all responses in Experiments 1 and 2. From this, it can be gathered that most trials produced responses between 1 and 3, with participants tending to shy away from larger responses. Also, from Experiment 2, we see that while participants use responses larger than 5, they do so very infrequently. Indeed, less than 7% of all responses were larger than 5. Moreover, the vast majority of these responses were from just three of the fifteen participants (P05, P06, and P08 in the middle row of panels of Figure 2; see also Figure 3, right panel).
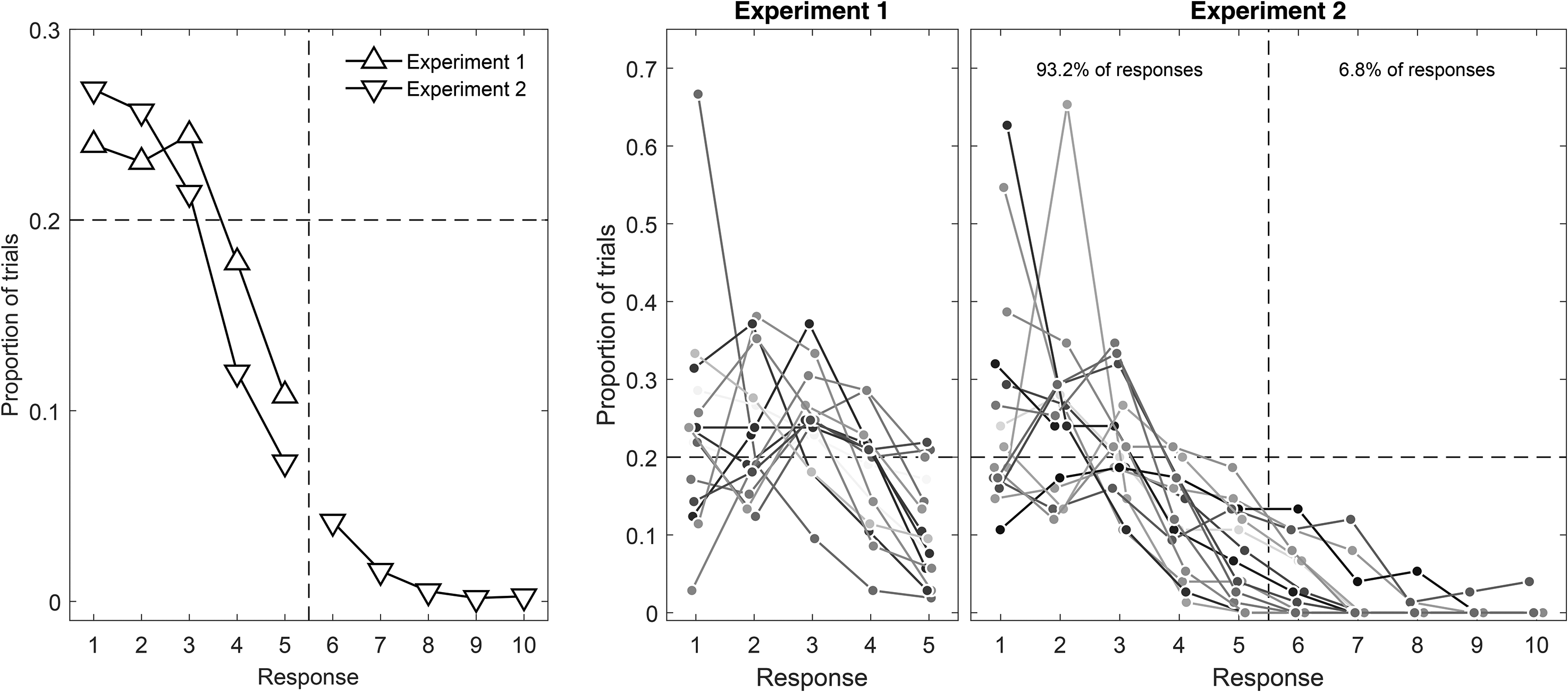
Distribution of responses for Experiments 1 and 2. Plotted are histograms of response data irrespective of object weight and number of objects actually contained. Horizontal dotted lines correspond to perfect performance across the board. Vertical dotted lines separate responses less or equal to 5 from responses larger than 5. Left panel shows group-level distributions of responses for Experiments 1 and 2. Middle and right panels show distribution of responses for each participant in Experiments 1 and 2.
A closer look at the individual results then shows that an observer can indeed perceive larger quantities of objects than are actually present in the container. As such, this observation validates the Experiment's motivation. At the same time, the change in instruction does not disqualify the observation made in Experiment 1 that participants, on the whole, tend to start underestimating the number of objects when that number becomes larger than four (for the two heaviest objects).
Experiment 3
The third experiment explored to what extent performance is attributable to using weight cues. If weight were the sole cue, then removing it from the stimulus set would effectively prevent accurate performance. Weight is likely one of an array of cues used, and removing the cue would negatively affect performance accuracy. To test for this possible scenario, the weight cue was eliminated by replacing the bead stimuli with 3D-printed spheres that were constructed such that the total weight of the content remained constant irrespective of the number of objects in the container.
Method
Participants. Fifteen new participants (five females 1 ) were recruited from the same pool. Their average age was 27 (range, 21–42). They were paid US$10 for their time.
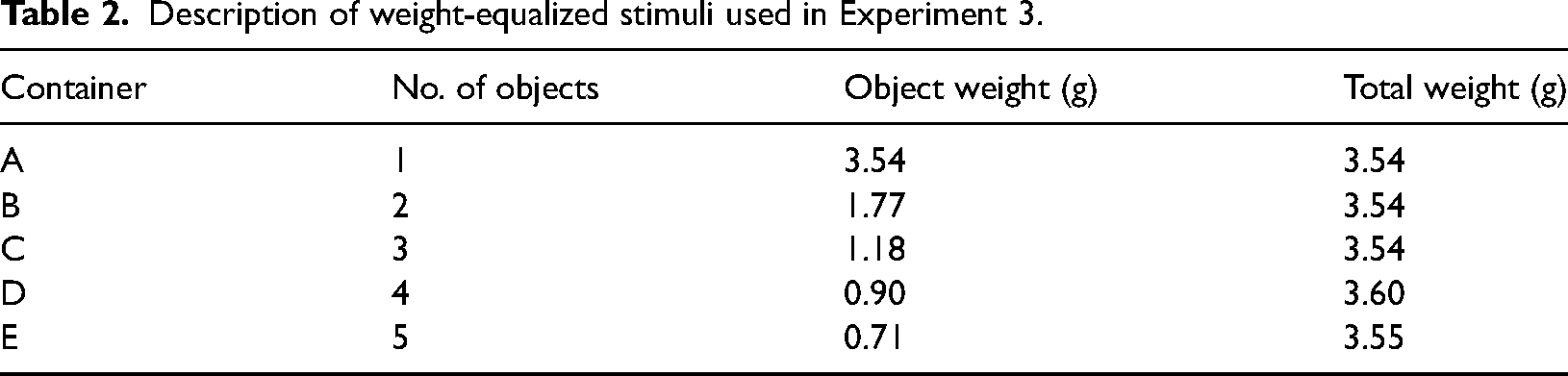
Materials. Objects were spheres designed such that, irrespective of the number of objects in the container, the total weight of the content was always ∼3.5 g (see Table 2 for details) 2 . The spheres were designed in SolidWorks CAD software and fabricated using 3D rapid prototyping technology. In order to obtain high precision in mass, low deviation in size, and smooth surface, we used stereolithography 3D printing technology (Formlabs Form 2). Given the need for constant volumes, different masses were obtained by varying the thickness of the shells of the objects. The cavity within the objects was obtained by printing two hemispheres, which were then glued to each other under UV light using the same liquid with which they were printed. This liquid is photopolymer resin (Formlabs Clear Resin v4) which cures a solid isotropic part under laser or UV light. The diameter of all objects is 18 mm, which was necessarily larger than those in the previous two experiments. Consequently, a slightly larger cardboard jewelry box was used (9 cm (L and W) and 3 cm (H)).
Description of weight-equalized stimuli used in Experiment 3.
Procedure. The experiment followed a 5 (Number of Objects) × 10 (Repetitions) fully within-participants design for a total of 50 trials per participant. As before, trials were blocked by Repetition. The task instructions were the same as in Experiment 2.
Results and Discussion
The results are shown in the right panel of Figure 1. Visual inspection shows that removing the weight cue did not eliminate participants’ ability to tell apart the different numbers of objects in the container. A repeated measures ANOVA produced a significant main effect on Number of Objects (F(4,40) = 10.39, p < .001, η2 G = 0.744). Post-hoc tests on adjacent pairs (one object vs. two objects, two objects vs. three objects, etc.) produced significant differences for all comparisons (all t-values > 3.06, all p-values < .005, and all Cohen d's > 0.81).
However, it was also apparent that the number of objects was systematically underestimated in a fashion reminiscent of performance with the lightest object in Experiments 1 and 2. To quantify the underestimation, slopes were calculated from linear regressions on the average estimates for each participant. Regressions were performed such that they pivoted on the point (1,1) so that a slope of 1 indicates perfect performance, while a slope of less than 1 indicates underestimation. The mean slope was 0.689 (95%CI 3 : [0.602; 0.786]; range, 0.397–1.030). The interpretation of this value is that when the cue weight is neutralized, the number of objects was underestimated, on average, by ∼30%.
General Discussion
This work is the first haptic numerical cognition study to examine containers specifically. Its main objective was to provide a descriptive analysis of people's abilities without any explicit theoretical assumptions. In a series of three experiments, this study examined how good people are at figuring out how many objects are contained in a box from touch alone. Overall, the results show that people are quite capable of performing this haptic task. Experiment 1 demonstrated very accurate performance, provided the objects were of sufficient weight. Experiment 2 demonstrated that giving or withholding information about the possible number of objects inside the container does not affect accuracy at a group level, but does produce different performance rates between participants. Specifically, not telling participants how many objects may be contained produces occasional overestimations. Experiment 3 demonstrated that removing the weight cue leads to systematic underestimations but does not eliminate people's ability to distinguish between different numbers of objects in the container.
Whereas Plaisier and Smeets (2017) ran haptic-auditory and auditory-only conditions, the current study ran haptic-only conditions, providing complementary information. Overall, the two studies are in agreement that performance on the estimation task was quite accurate. If we allow ourselves to make direct comparisons across two different studies, we can draw two tentative conclusions. First, given that all three of these conditions could support the estimation task, we can conclude that both haptic and auditory information can be considered sufficient but that neither is necessary. Second, the results reported by Plaisier and Smeets showed accurate performance for only up to three objects in both conditions and significant underestimation for four and five objects. The results from Experiments 1 and 2 show accurate performance (with the two heaviest objects) for up to four objects, suggesting that performance based on haptic information alone might be the more accurate. Either tentative conclusion warrants a dedicated study that features all three conditions in one within-subjects design.
In Experiments 1 and 2, the lightest object stood out in that it was the only object associated with substantial underestimation. We speculate that the lightest (and smallest) object may have meaningfully reduced the amount of physical energy created by the content during the handling of the container. We recall the potential cues produced by a single ball rolling in a tube identified by Frissen et al. (2022): Rolling noise, impacts, and elastic bounces. The current array of stimuli adds cues generated from the interaction between multiple objects to the list. All of these cues are presumably attenuated as the size and weight of the objects get smaller. At some point, this attenuation would go below a currently unknown threshold, meaning that the available sensory information is no longer salient or reliable enough for solving the perceptual task. Since this study was intended to document how accurate container haptics could be, not to identify (the relative contribution of) the various physical cues at play, the question of stimulus saliency is deferred to future studies.
Much is still unknown about a host of potentially pertinent factors, including the amount of content, the characteristics of the container, and sensory information from other senses. The current stimulus set contained very small numbers of objects. While this was a deliberate choice to be close in parameters to the one pertinent earlier study (i.e., Plaisier & Smeets, 2017), it does leave open questions about other ranges of people's numerical cognitive abilities, such as for countable quantities and the estimation of large numbers. No container haptic studies exist pertaining to non-subitizable, yet countable, quantities, and only one has considered very large numbers. Frissen and Chen (under review) had participants estimate the number of pieces of plastic straws (either 1.5 cm or 4.5 cm) in plastic food containers. Containers were filled to between ∼15% and ∼80%, and participants were asked to judge how full each container was in two different tasks. The first was a magnitude estimation task in which participants estimated the absolute number of objects (e.g., “there are 250 objects in this container”). The second task was to make the judgment regarding proportion (e.g., “the container is 50% full”). The results for the first task showed that participants grossly underestimated the absolute number of objects; however, normalized results showed that participants retained an ability to correctly judge the numbers in terms of proportionality. That is, if the difference in the amount of content were a factor 2, then the corresponding estimates would also differ by a factor 2. Performance on the second task was highly accurate. Moreover, performance on the two tasks was correlated, suggesting common perceptual mechanisms. These results are consistent with the current study to the extent that they, too, show considerable accuracy in numerical ability with container haptics by untrained participants.
In all extant container research, experimental manipulations only affected the content, leaving the container always the same. However, understanding container haptics should also include understanding the contribution of various characteristics of the container itself. For instance, is container haptics differently affected by handling a small jewel box as compared to handling a large moving box? Or does the size of the container relative to the content affect container haptics? Finally, the current work deliberately precluded auditory cues to examine the abilities of the haptic system per se. However, in most real-life cases of interacting with a container, auditory cues will be present, and there is already experimental evidence that these provide important pertinent information (Plaisier & Smeets, 2017). Future works should more closely investigate the multisensory reality of interacting with containers and look at how auditory and haptic cues are combined and/or integrated.
The study of container haptics asks how good haptic perception is at learning about things hidden from direct touch inside a container. While the empirical evidence is still sparse, it all seems to point to the conclusion that container haptics is surprisingly capable or, perhaps unsurprisingly, capable.
Footnotes
Acknowledgements
We would like to thank Teja Kaipa and Alana Levene for their help with the data collection and Nurlan Kabdyshev and Moldir Zabirova for preparing the 3D-printed materials.
Author contribution(s)
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by a Bentley University's Research Council grant awarded to Mounia Ziat.