
Abstract
Motivated by the need for efficiency and robustness in repetitive robotic tasks such as locomotion, this study introduces the concept of Natural Motion Manifolds (NMMs) and presents a control method to stabilize and excite motions based on these structures. By considering the intersection of a Poincaré section with a surface comprising a continuum of autonomous evolutions, the proposed controller extends the linearized Poincaré map control from a single orbit to a family of orbits. This allows us to derive simple controllers to excite intrinsic nonlinear resonances and exploit the natural dynamics when varying the energy target (or the running velocity). We validated the method through simulations and experiments on a serial elastic quadruped. Relying on natural dynamics and minimal motor commands, we could implement a bounding gait at desired velocities without needing dynamic compensations. The experiments provide a thorough validation of the feasibility and the benefits of controlled, predictable, and purposeful oscillatory behavior via explicit excitation of a quadruped’s natural dynamics.
1. Introduction
Numerous studies on biological systems have shown that repetitive and rhythmic motion, such as walking and running, is largely guided by the intrinsic mechanical response of the physical structure (Alexander, 2002; Ahlborn and Blake, 2002). Especially during fast locomotion, a carefully tuned interaction between the pull of gravity, the limbs’ inertia, and the legs’ visco-elastic response 1 is advantageous to minimize energy expenditure, enhance stability, and reduce control complexity (Daley, 2018; Geyer et al., 2006; Ludeke and Iwasaki, 2020; Poulakakis et al., 2006). Similarly, taking full advantage of natural dynamics in robotics promises to yield increased performance, less expensive hardware, and simpler control principles (Kashiri et al., 2018). Since the pioneering works of Raibert (Raibert et al., 1986) and McGeer (Mcgeer, 1990), substantial strides have been made in developing robots that include passive compliant elements (Badri-Spröwitz et al., 2022; Calisti et al., 2017; Hutter et al., 2013; Zhang et al., 2020). Both theoretical and experimental evidence confirm that leveraging elasticity by storing and releasing energy results in increased efficiency and robustness (Alexander, 1990; Chen et al., 2019; Hurst and Rizzi, 2008; Vu et al., 2015).
However, practical exploitation of the elasticity and natural motion presents significant control challenges. Section 2 discusses research directed to addressing it. As of today, significant limitations still persist. With the exception of specific works related to Hybrid Zero Dynamics (HZD) (Da et al., 2016; Da and Grizzle, 2019), existing control strategies primarily focus on the control of a single gait trajectory (Cao et al., 2015). This strongly limits leveraging the natural dynamics for speed transitions, disturbance recovery, and the methodological development of effective and efficient controllers to fully harness nonlinear intrinsic resonances. On the other hand, methods based on the excitations of resonance limit the analysis to linear approximations. However, locomotion entails large-amplitude oscillations in multi-body systems, which, coupled with elasticity and segmented designs, generate substantial nonlinear behavior. In this context, sufficiently soft springs are necessary to store enough energy for fully passive locomotion; however, this form of compliant actuation is limited by low bandwidth, which poses challenges for active corrections during highly dynamic motions. Consequently, most techniques are unable to robustly handle the limited control authority inherent in serial soft elastic actuators (necessary for efficiency and versatility (Hutter et al., 2013)). Furthermore, the experimental validation of compliant robot designs and controllers exploiting natural dynamics to realize dynamic gaits remains limited.
We propose a new methodology combining geometry, nonlinear dynamics, and closed-loop control that simultaneously addresses all these open challenges. In doing so, this work aligns itself with a series of activities that we have been pursuing in the past years. Using control to exploit intrinsic oscillations in elastic systems, including robots, was explored in Stratmann et al. (2017) and Lakatos (2018) with a bang-bang controller. This simple and robust method showed promising results but relies on heuristics and empirical tuning. A systematic approach using nonlinear modal theory (Albu-Schäffer and Della Santina, 2020) achieved forward hopping in an elastic monopod (Calzolari et al., 2022) and efficient pronking gaits in a quadruped (Calzolari et al., 2023). However, the more we applied nonlinear modal theory, the more we realized that some constraints inherent in that framework were over-constraining the solution space. To harness natural dynamics effectively, a broader range of oscillation families is needed.
This work goes the extra step of describing, stabilizing, and exciting a whole family of periodic gaits exploiting natural dynamics. We introduce Natural Motion Manifolds, a further generalization of Eigenmanifolds. They are one-parameter families of conservative natural oscillations in general hybrid Lagrangian systems. At the same time, these geometrical objects generalize and provide extra structure to works looking into continuation algorithms (Raff et al., 2022a). This, in turn, allows us to borrow ideas that we developed for the Eigenmanifold case (Della Santina and Albu-Schaeffer, 2021) and combine them with a novel extension of the Poincaré linearization method. The result is a robust and effective control methodology that we can use to excite hyper-efficient 2 natural evolutions in legged systems and other robots.
As a result, we can, for the first time, experimentally demonstrate the excitation of entire families of quasi-passive locomotion gaits on a full-fledged quadruped robot equipped with soft serial elastic actuators (see Figure 1). The figure illustrates the key concepts presented in this article. Simplified models of robots equipped with soft springs are used to identify Natural Motion Manifolds (NMM), which are geometrical structures collecting a family of open-loop periodic solutions of the nonlinear system. In the case of locomotion, these orbits correspond to passive gaits. The intersection of the NMM with a Poincaré section is used to construct a coordinate system decoupling transversal and energy dynamics, and to derive simple controllers to stabilize and excite the intrinsic nonlinear oscillations: higher energy levels are realized by “climbing up” the NMM. The experiments on a serial elastic quadruped achieved a bounding gait at two desired velocities (and transition between them) by completely relying on the natural dynamics and minimal motor commands.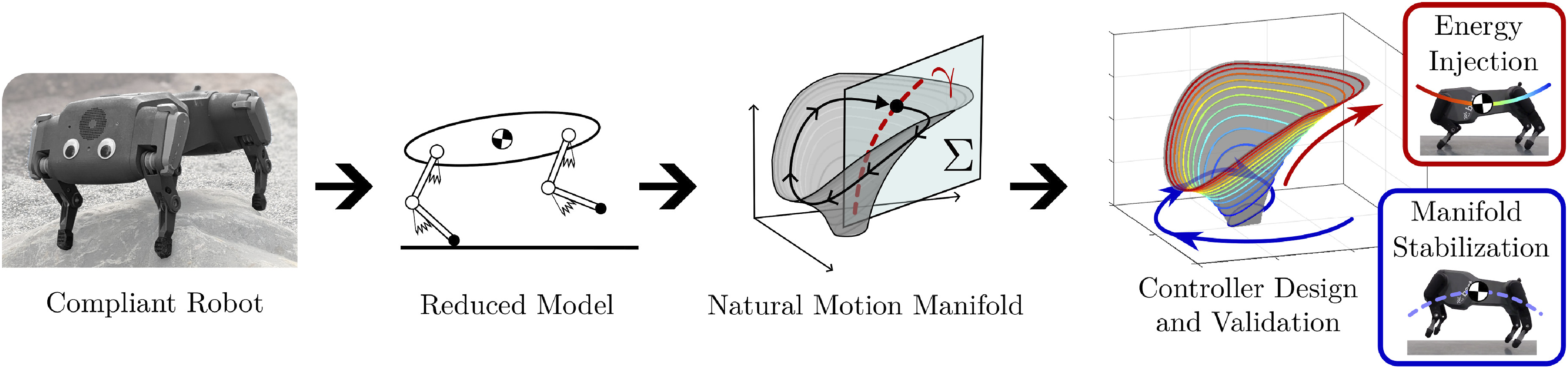
To summarize, this work contributes to the state of the art in elastic locomotion with (1) The definition of the Natural Motion Manifold (NMM), a geometric concept related to families of conservative periodic orbits. (2) The empirical characterization of NMM for conservative and non-conservative mechanical systems. (3) A generalization of the linearized Poincaré map control approach that can be used to stabilize orbits on an NMM. (4) A method that leverages contributions (1) and (3) to identify, stabilize, and excite passive gaits in a series elastic quadruped. It requires no empirical tuning and allows continuous adjustment of energy and speed. (5) The first demonstration of experimental excitation of families of locomotion gaits of the natural dynamics of the quadruped.
The remainder of the paper is organized as follows. Section 2 discusses the state of the art in locomotion via natural dynamics excitation. Section 3 introduces NMMs and extended Poincaré sections, and Section 4 a general control strategy to excite evolutions contained in NMMs—that is, contribution (1) to (3). Additionally, we provide a discussion on the analogies and differences with HZD-related works (Da and Grizzle, 2019) concerning the use of multiple periodic solutions to enhance locomotion control. We then narrow our focus to locomotion by introducing contribution (4) in Section 5. Finally, Section 6 reports the extensive experimental results in efficient locomotion of an elastic quadruped, contribution (5).
2. Related work
Locomotion is an inherently difficult task, requiring, in general, careful planning, powerful actuators, and many sensors. This task is even more challenging when the additional goal of exploiting the robot’s natural dynamics is added. Due to the extensive nature of the existing literature, we will focus on a selection of papers that present the most relevant concepts for our study, with particular emphasis on works that exploit compliance to enhance locomotion performance in legged systems.
2.1. Identification and control of passive gaits
A framework for identifying passive and actuated gaits was presented in Remy et al. (2011). This provided the foundations for works that subsequently demonstrated the theoretical existence and connectedness of natural gaits (Gan et al., 2018; Raff et al., 2022a), showed that selecting gaits based on speed leads to increased efficiency (Xi et al., 2016), and developed algorithms to find gaits and optimally deal with energy losses (Raff et al., 2022b).
Controllers that focus on the stabilization of passive gaits include methods based on foot placement and energy controllers (Ahmadi and Buehler, 2006), constant touchdown angle with stance-retraction (Poulakakis et al., 2005), time delay orbit controllers (Owaki et al., 2013) in combination with energy-preserving strategies (Hyon and Emura, 2004), applications of chaos controllers and Poincaré maps (Huang et al., 2017), and combinations with learning (Wu et al., 2023). Alternatively, there exist methods exploring the combination of passive dynamics with model-based control, such as Renjewski et al. (2015) and Beck et al. (2022). Additionally, Cao et al. (2015) and Cao and Poulakakis (2016) suggested switching between fixed-points to robustly transition to different gaits and speeds for simulated models. Different from these works, the approach proposed in this article explicitly uses the natural dynamics to design the controllers and excite nonlinear oscillations, sustaining and varying the speed of a gait in hardware.
2.2. Methods based on emergent behavior
Several approaches aim to harness natural dynamics by leveraging the emergent behavior induced by an external excitation. For example, by adding elasticity in the feet (Spröwitz et al., 2013) and in the spine (Wang et al., 2017), central pattern generators can be used to self-stabilize locomotion in quadrupeds (Ruppert and Badri-Spröwitz, 2022). Alternatively, sinusoidal open-loop excitations can be used (Nie et al., 2016). Efficient forward hopping of a curved beam is achieved in Reis and Iida (2014) using linear free vibrations. Bio-inspired reflexes (Masuda and Ishikawa, 2018) and negative hysteresis (Wanders et al., 2015) are also used to excite resonance. Vibrations are also used in crawling soft robots (Calisti et al., 2017). Most of the aforementioned methods are based on linear analyses to compute the natural frequencies, a perspective that remains actively supported (Kashiri et al., 2017; Ludeke and Iwasaki, 2020). Research on adaptive natural oscillators (Buchli et al., 2006; Khoramshahi et al., 2017) demonstrates the feasibility of exciting periodic orbits by tuning the frequency of sinusoidal oscillators to the resonant frequency of machines. However, convergence issues may arise when handling hybrid systems (Khoramshahi et al., 2017), and, importantly, nonlinearities significantly influence oscillations at large amplitudes. As a result, sine waves may be inadequate to excite locomotion machines that feature nonlinear behavior (Lakatos et al., 2013). Instead, a targeted impulse that accounts for the nonlinear orbit can be more successful, especially for line-shaped oscillations that cross an equilibrium (Lakatos et al., 2015). This research prompted the design and control of the compliant quadruped BERT (Lakatos et al., 2018), which uses a simple bang-bang controller to excite nonlinear oscillations by leveraging the direction of this lower-dimensional subspace. Yet, this latter approach focuses on orbits with line-shaped topology, which is quite restrictive compared to the oscillations considered here.
2.3. Control-oriented methods
A distinctly different class of approaches includes algorithms rooted in control-related principles (such as stability, dimensionality reduction, and input minimization) that progressively integrated elasticity into their frameworks for overall improvements. A prominent example is compliant HZD (Poulakakis, 2008), which exploits physical springs by aligning virtual constraints with the elastic response so as to encode templates such as SLIP as the zero dynamics of higher-dimensional segmented legged robots (Poulakakis and Grizzle, 2009). Some relevant examples can be found in Sreenath et al. (2013), Hubicki et al. (2018), Ma et al. (2017), and Reher and Ames (2021), where compliant elements in the legs are leveraged to achieve improved stability and higher speeds. Typically, virtual constraints are realized via feedback compensations that may interfere with the natural system response. This is mitigated by relaxing the constraints along certain subspaces to obtain a natural passive response (Sadeghian et al., 2017; Sreenath et al., 2011), or via robot design (Hubicki et al., 2018). However, enforcing reduced models to increase tractability still requires partial compensations. Additionally, in Rezazadeh et al. (2015), a fixed natural frequency calculated for the leg at rest length is used for step planning. Within the same approach, oscillations are forced via sinusoidal excitation, designed using linear arguments (Rezazadeh and Hurst, 2020).
A different idea is utilized within the Divergent Component of Motion (DCM) planning framework (Englsberger et al., 2015), where the timing between steps can be tuned to match the (linearized) intrinsic natural frequencies for compliant quadrupedal walking (Pollayil et al., 2022).
Model-based optimizations for planning and control can leverage intrinsic dynamics with energy economy as the main objective. Efficient locomotion for a soft, elastic biped is shown in Werner et al. (2017), and joint stiffness and trajectory tuning are optimized in Gasparri et al. (2018). Performance gains through a combination of optimization and iterative learning are explored in Ding et al. (2024) for a parallel elastic quadruped.
2.4. Current limitations
Broadly speaking, control-oriented solutions offer structured approaches, but the controllers they generate can sometimes be practically ineffective, particularly when a desired dynamic behavior is imposed on a compliant system (Keppler et al., 2018). These methods also face limitations inherent to their specific frameworks. For example, DCM requires an accurate, high-bandwidth torque controller, which is challenging to achieve with soft series elastic actuators (SEAs). Works related to HZD often rely on simulation-based searches (as other optimization methods) to generate feasible controls, which can suffer from issues like local minima, scaling in higher dimensions, and constraints that reduce versatility. Addressing these challenges is a focus of recent HZD research (Da and Grizzle, 2019; Ma et al., 2017). Another key consideration is that most existing control strategies focus on stabilizing a single orbit (Cao et al., 2015), which limits the ability to fully exploit the natural nonlinear dynamics for speed transitions and disturbance recovery. Notable exceptions can be found in specific HZD-based studies (Da et al., 2016; Da and Grizzle, 2019; Nguyen et al., 2017), where controlled limit cycles are interpolated based on locomotion velocity. This allows for adjusting the gait based on speed, resulting in more natural-looking gaits and improved stability. This feature is common to both of these works and the present study, albeit with notable differences discussed in Section 4.7. Overall, control methods adapted to natural compliance balance tractability with performance. However, they rely on partial model compensations that can conflict with the natural dynamics, and the oscillatory nature of the entire mechanical system is ultimately not explicitly addressed.
Emergent behavior approaches typically yield simpler strategies and are effective in generating oscillations in hardware. However, analyzing convergence to a desired motion is challenging, especially as the degrees of freedom (DoF) increase. Sinusoidal excitation based on linear analysis may be unsuitable to sustain large nonlinear oscillations (Lakatos et al., 2013).
In summary, a comprehensive framework is still needed—one that leverages natural dynamics without limiting robot design while ensuring predictability, stability, and versatility. Achieving this is challenging, particularly in bridging theoretical and practical aspects for general nonlinear cases.
3. Families of energy-conservative oscillations
In this work, we are interested in families of periodic orbits of mechanical systems that conserve energy (i.e., the natural oscillations). These trajectories encode efficient oscillations of the natural dynamics and offer a geometrical structure that can be exploited for planning and control (Albu-Schäffer and Della Santina, 2020; Della Santina and Albu-Schaeffer, 2021; Della Santina et al., 2021). We’d like to highlight that until Section 5, our discussion remains pertinent to a quite general class of mechanical systems, demonstrating applicability beyond locomotion, including potential use in other contexts, such as robot arms.
A periodic orbit is a trajectory that repeats itself exactly after a time interval T > 0. Consider a system within the class of hybrid Lagrangian systems (Burden et al., 2015; Colombo and Eyrea Irazú, 2020; Raff and Remy, 2024). Given its dynamical flow


A two-dimensional invariant sub-manifold Here, “natural motion” indicates that the orbits are autonomous, open-loop solutions of the nonlinear system. Prime examples of systems featuring such mathematical structures are smooth conservative systems, that is, systems which satisfy Starting from an equilibrium or one periodic orbit, the family and its bifurcations can be evaluated using, for example, numerical continuation-based algorithms within a desired energy range (see Raff et al. (2022a)). In general, a system can feature a multitude of natural motion manifolds, which may be connected or not. Additionally, from the viewpoint of bifurcation theory (Strogatz, 2018), these manifolds may exist only within certain energy ranges (e.g., asymptotically reach a homoclinic orbit). An example of these manifolds can be found in Gan et al. (2018), where all kinds of gaits of a simple conservative biped model are connected. Another example of a family of energy-conservative periodic orbits is given by Eigenmanifolds (i.e., nonlinear modes) (Albu-Schäffer and Della Santina, 2020). Indeed, Eigenmanifolds can be seen as a sub-case of the more general NMM that is obtained when a stable equilibrium (from which the manifold spawns) is included in While the local existence of neighboring closed orbits is well-studied for conservative systems (Muñoz-Almaraz et al., 2003; Sepulchre and MacKay, 1997), the same cannot be said for non-globally conservative ones. In that case, energy fluctuations typically destroy periodic orbits or, in special cases, isolate an orbit and generate a limit cycle (Strogatz, 2018). However, we emphasize that, in principle, a system that is not globally energy-conservative can still possess families of energy-conservative orbits. This is why the orbits must be conservative in the definition of an NMM, but the system that generates them is not necessarily globally conservative. In fact, we discovered such a case for the model of the sagittal quadruped robot presented in Figure 2(c) and described in Section 5, which revealed to feature many of these families. To narrow our focus on natural motion manifolds that admit an energy parametrization, we need to first summarize the concepts of Poincaré sections, Poincaré maps, and fixed points.

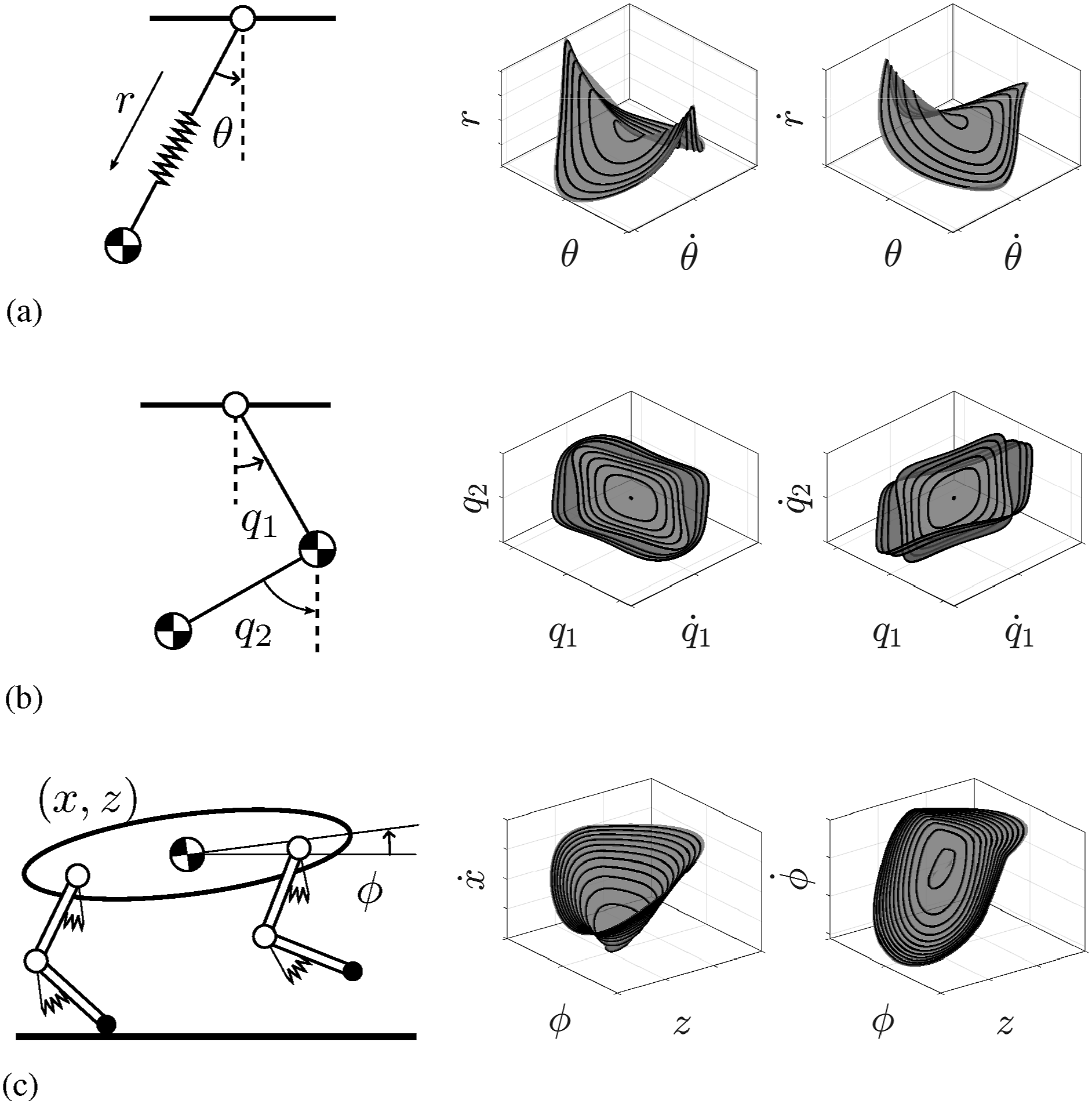
Examples of systems that feature families of conservative periodic orbits: (a) a pendulum with radial spring, (b) a double pendulum (exhibiting bifurcation), and (c) a sagittal elastic quadruped with massless legs. All systems are affected by gravity.
3.1. Background: Poincaré section and maps
Given a state space of dimension n, the Poincaré section is an n − 1 dimensional sub-manifold typically used to study the properties of periodic orbits of nonlinear systems. When choosing a section for a particular orbit, the section can be freely defined along the orbit and transversal to the flow. The section is not necessarily orthogonal to the flow, but cannot be tangent to it.
The Poincaré forward map (or Poincaré map) By analyzing the fixed points, one can gain insights into the system’s behavior (e.g., local stability) and can use it to improve control design (Dadashzadeh et al., 2014). Under additional technical conditions (Burden et al., 2015), Poincaré maps are well-defined for hybrid dynamical systems. When the system has inputs,


3.2. Fixed-points generators
Let us assume the existence of a Poincaré section Σ that transversely intersects an NMM. This intersection, schematically presented in Figure 3, identifies a curve γ, which collects the fixed points
4
The intersection between a Poincaré section Σ and a manifold comprising energy-conservative autonomous evolutions identifies a smooth curve γ parametrized by energy E. This curve is utilized for control design to stabilize and excite efficient mechanical oscillations (such as locomotion gaits) at different energies.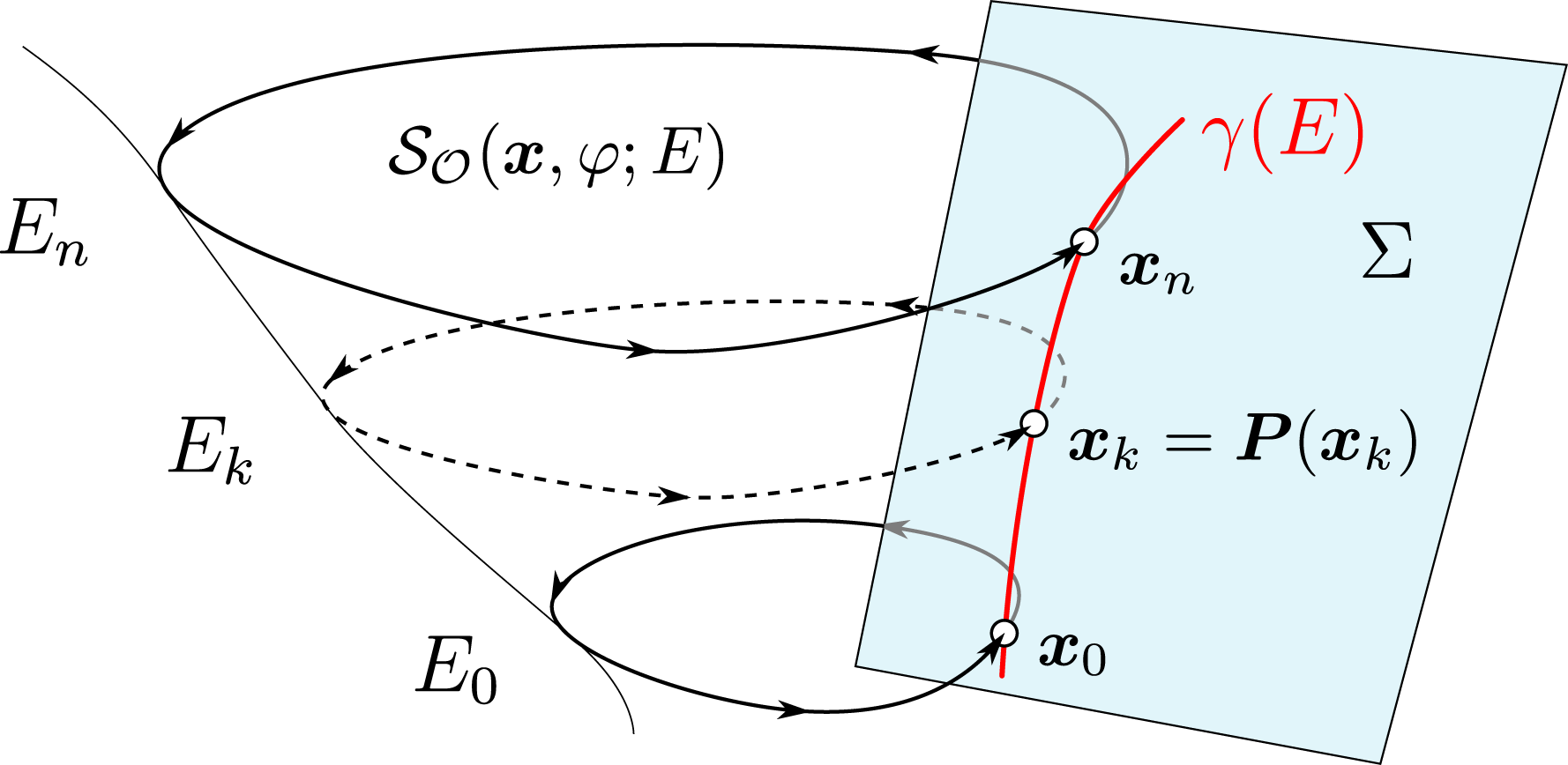

Using the above concepts, we can define curves named “Fixed-points Generators” that completely identify an NMM.
Given an NMM In the following, we will take the energy E of the curve passing through the parametrized points as the parametrizing variable, and we center our efforts on mechanical systems with NMMs that admit these types of fixed-point generators. We assume that a desired NMM has been identified and focus on controlling these objects. The main idea is that natural motion manifolds underpin nonlinear resonance dynamics, which we can exploit to achieve efficient motion if properly excited.
4. Natural motion manifold control
We can expect that the periodic orbits described by a natural motion manifold are not attractive in general, and some form of stabilization is required to realize them in practice. This is certainly the case for purely conservative systems
5
(Remy, 2011). Here, we seek a control method for stabilizing a system on one of its NMMs and exploiting its structure to reach a desired energy level. A strategy to accomplish this goal, but limited to the stabilization of Eigenmanifolds, was recently proposed in Della Santina and Albu-Schaeffer (2021) using a continuous controller. This approach can be regarded as efficient for the excitation of oscillations in mechanical systems since the control effort on the manifold converges to zero. However, as mentioned in Section 3, Eigenmanfolds are limited to a certain orbit topology, which, in contrast to NMMs, limits their application in locomotion. Inspired by these methods, we propose to export some control concepts of nonlinear modal theory to the control of more general oscillations (such as locomotion gaits) and merge them with approaches for controlling chaos (Fradkov and Evans, 2005). To that end, we propose a control architecture to stabilize NMMs using the associated extended controlled Poincaré map, and consisting of the following two tasks. (1) The stabilization task locally maintains the system close to the natural motion manifold by means of linearized Poincaré maps of the transversal dynamics. Stabilization to the manifold is essential to suppress the onset of irregular or multi-periodic oscillations.
6
This is different from stabilizing the fixed-point of one single orbit (OGY chaos controller (Fradkov and Evans, 2005; Huang et al., 2017)), or locally stabilizing the orbit using optimal time-varying controllers such as Beck and Sakamoto (2023), or using projection operators on the orbit in Saetre and Shiriaev (2020). (2) The excitation task injects energy to sustain the oscillation at a desired energy level by exploiting the tangential dynamics on the manifold.
The two controllers are designed to avoid interfering with each other, with their control actions converging to zero upon reaching the target orbit on the NMM (hyper-efficiency). This scheme can be seen as an extension of the linearized Poincaré map controller from a point to a curve, combined with an open-loop excitation of unstable periodic orbits. This approach increases the linear controller’s attraction region and further reduces the stabilization control space by 1 dimension. For the derivation of the controllers, a definition of transverse coordinates for the Poincaré map adapted to a curve is introduced, which facilitates the design of both the stabilization and the excitation controllers.
4.1. Transverse coordinates system
We intend to use the fixed-point generator γ to derive the stabilization and excitation controllers. To this end, we require new coordinates to construct a control error variable more easily. A natural choice is to use the energy parametrization, which uniquely defines a point on γ and avoids utilizing non-physically consistent norms to define a distance to the curve. Thus an error δ

The transverse coordinates are defined by introducing a local diffeomorphism in a neighborhood of the curve γ, as shown in Figure 4. A point Transverse coordinates system defined on the curve γ that collects the fixed points.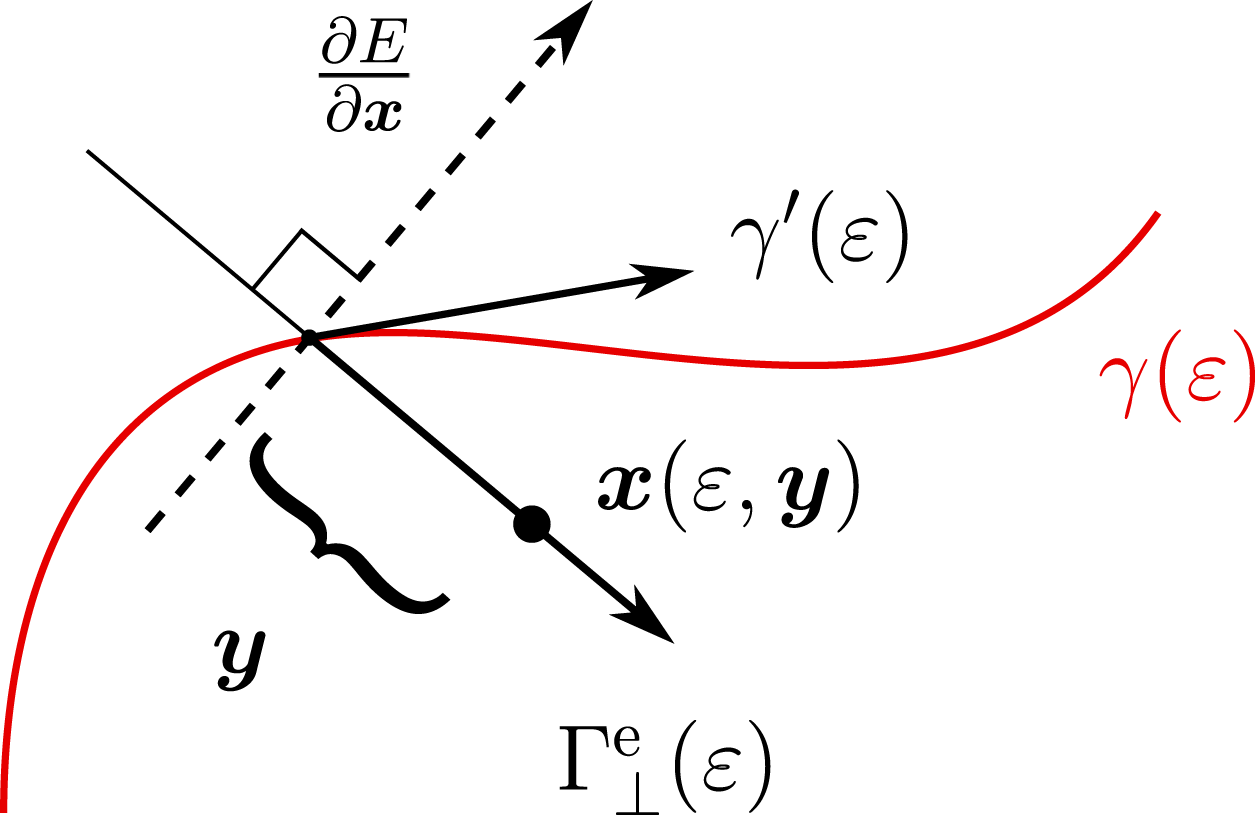







4.2. Transverse linearization
The Poincaré map dynamics is linearized to derive the local controllers in the new coordinates. Let us write the forward map function (12) of for the transverse coordinate



Thanks to the choice of transverse coordinates, one can show that the dynamics of ɛ is linearly decoupled from



4.3. Input realization
To allow linearly decoupled control of ɛ and
The input vector This can be achieved by defining the input forces to the system The linearized dynamics (11) and (12) are now utilized to obtain control gains. The input


4.4. Stabilization
This task aims to stabilize the transversal




4.4.1. Stability for the conservative case
Since any input (23) does not affect the energy, we can analyze the local stability of each fixed point at γ(ɛ) independently. Therefore, if the condition on magnitude of the largest eigenvalue

4.5. Energy controller
The energy controller
We propose to use the following proportional-integral control with scalar gains β and ρ

If the nullspace of either
Under Assumption 1, one choice for the decoupling matrices can be

4.5.1. Stability of the energy varying case
By combining the stabilizer and injection, and canceling out the zero terms, the linearized dynamics reduces to
To prove local exponential stability of (26), the
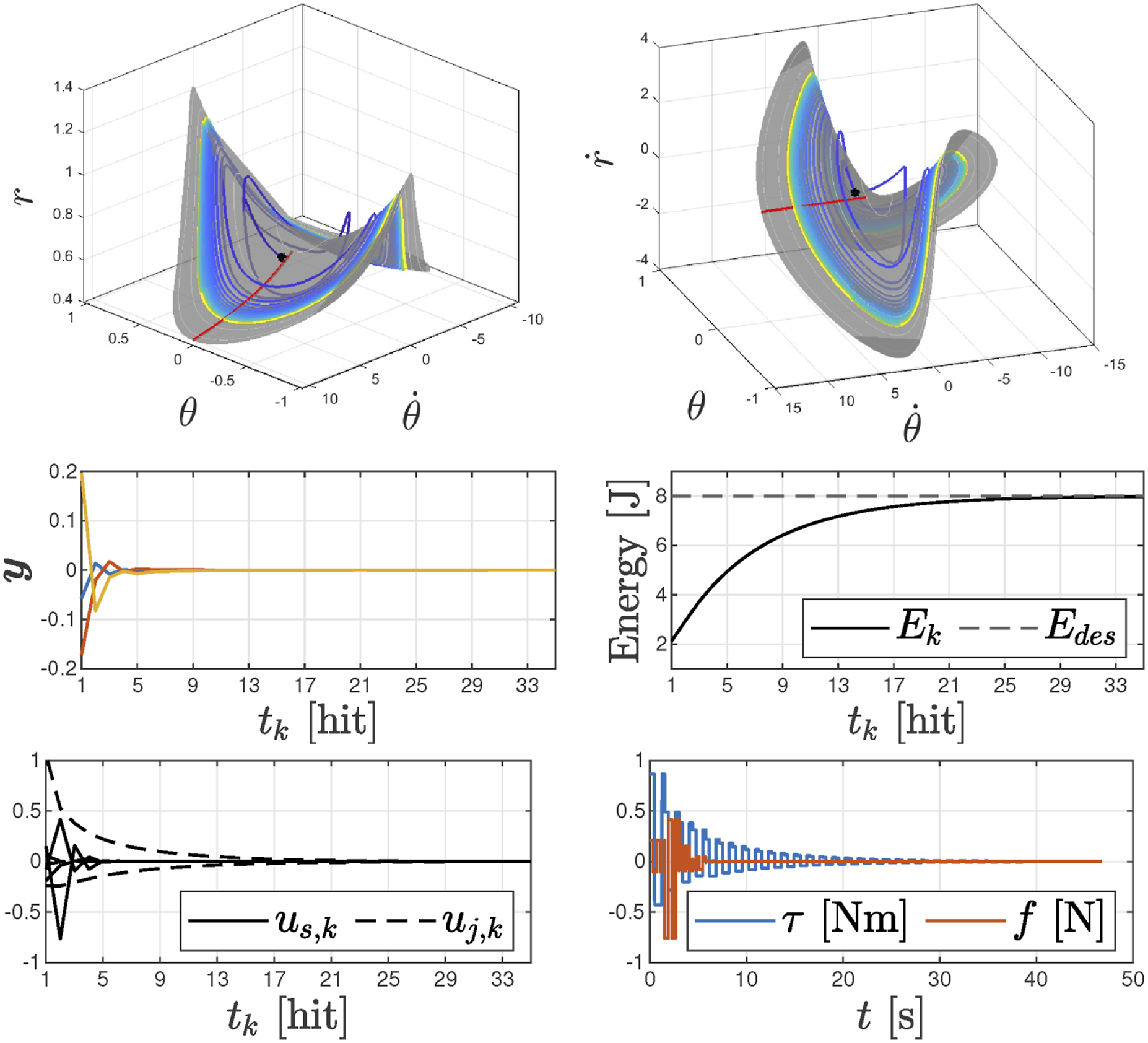
4.6. Example: Pendulum with radial spring
As a first, simple example, we present the application of the proposed approach for the stabilization and excitation of a pendulum with a radial spring along one of its natural motion manifolds. This system is schematically presented in Figure 5, and it has state Left Plot: Coordinates and input forces for a pendulum with radial spring. Right Plot: Natural motion manifold of the radial mass-spring system projected on the xz plane. The color-coded lines represent regular periodic oscillations for a range of energy levels. In this case, the manifold coincides with an Eigenmanifold. Elements of the stabilization gain System trajectories (color-coded) of the radial mass-spring system converging to a natural oscillation at a target energy level on the identified natural motion manifold (gray surface). The red line represents the intersection of the manifold with the Poincaré section, that is, the curve γ. The color of the simulated trajectories for validation transitions from blue to yellow to represent time. After a brief transient, the trajectory is stabilized on the manifold. When the orbit reaches the target energy, the control effort converges to zero.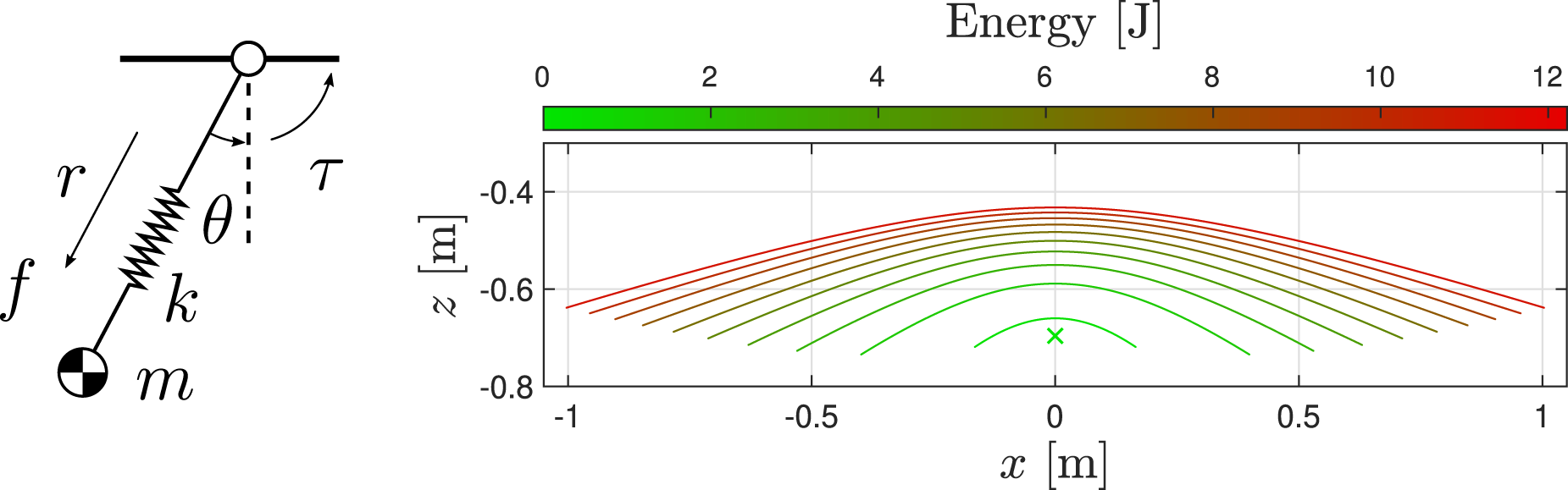
4.7. Relations to previous studies
As mentioned in Section 2, the idea to utilize a multitude of periodic solutions to improve stability is shared with the line of works related to Da and Grizzle (2019), and to some degree also with Cao and Poulakakis (2016), though there are several distinctions. In Da et al. (2016), the velocity-based interpolation of controllers is driven by the intuition that this enhances stability, whereas here a continuum of controllers emerges from the fact that NMMs are smooth collections of infinite solutions with different energy levels. Because of this, interpolation or switching between fixed points is not necessary, and actually it is not possible: each point in γ is assumed to represent a passive periodic orbit. Discretization is used solely for practical implementations. Another key difference is that Da and Grizzle (2019) seeks stabilization of an orbit via open-loop trajectories (not necessarily periodic or passive), while in this work, a family of passive orbits is utilized as a starting point to build controllers. Additionally, natural families are identified via numerical continuation, in contrast to optimization in Da et al. (2016), Da and Grizzle (2019), and Cao and Poulakakis (2016). Finally, the energy controller is developed using the manifold, and it is decoupled from the stabilizer; these concepts are not found in the previously mentioned works.
5. Application to locomotion
We present a methodology to make use of the NMM control on a family of serial-elastic quadrupeds featuring lightweight, 7 non-redundant legs. 8 This consists of the following three steps: (i) the derivation of a control-oriented reduced order model suitable for exploring the natural dynamics, (ii) the identification and parametrization of the natural motion manifold, and (iii) the design of the stabilization and energy controllers presented in Section 4. We validate the approach through simulations and experiments.
5.1. Modeling
In this section, we introduce the model for a family of quadruped robots and provide a reduced-order representation of their dynamics.
5.1.1. Full-order model
Consider a generic quadrupedal robot constrained to the sagittal plane as shown in Figure 8. The robot consists of a floating base main body, or trunk, with legs attached to it and equipped with serial elastic actuators (SEA) at each joint. Let Schematic representation of a serially elastic actuated robotic quadruped. Springs of stiffness k are collocated between a motor (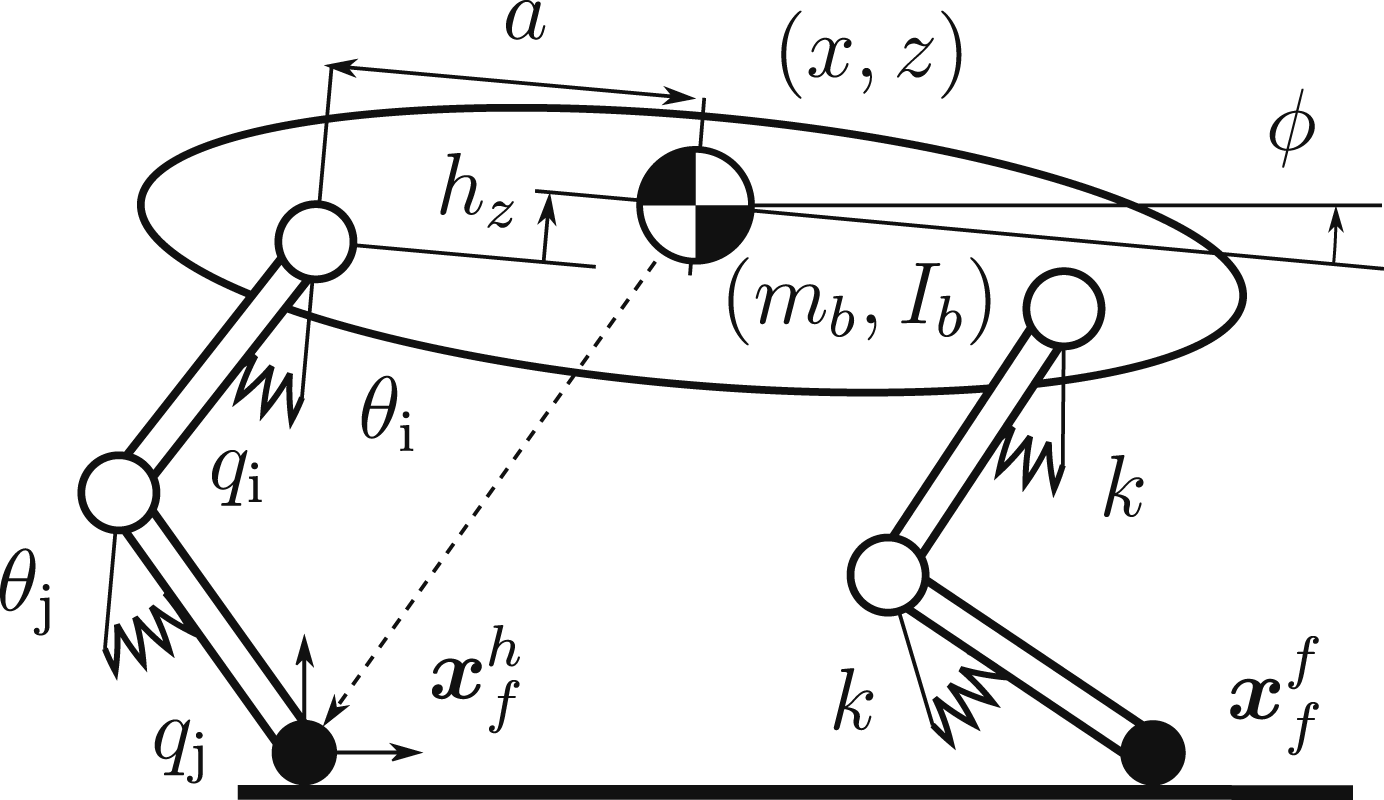





5.1.2. Control-oriented reduced-order model
For the rest of the article, we focus on a simplified model that captures the key dynamics of interest. This model is defined under the following conditions:
C1 implies that there is no loss of kinetic energy at impacts, thus (30) simplifies to


This reduced-order model is mathematically equivalent to a free-floating trunk affected by the active springs’ projected forces, as shown in Figure 8.
5.1.3. Hybrid dynamics
When a foot hits or leaves the ground, the dynamics equations of the reduced-order model suddenly change. Therefore, this model is hybrid in nature, consisting of the three continuous-time dynamic models defined in C2. The phases and the transition guards are reported in Figure 9. The ground reaction forces at the hind and front feet are The three possible flow states of the hybrid system modeling the dynamics of an elastic quadruped: double support, single support, and full flight. The transitions and guard conditions are also reported.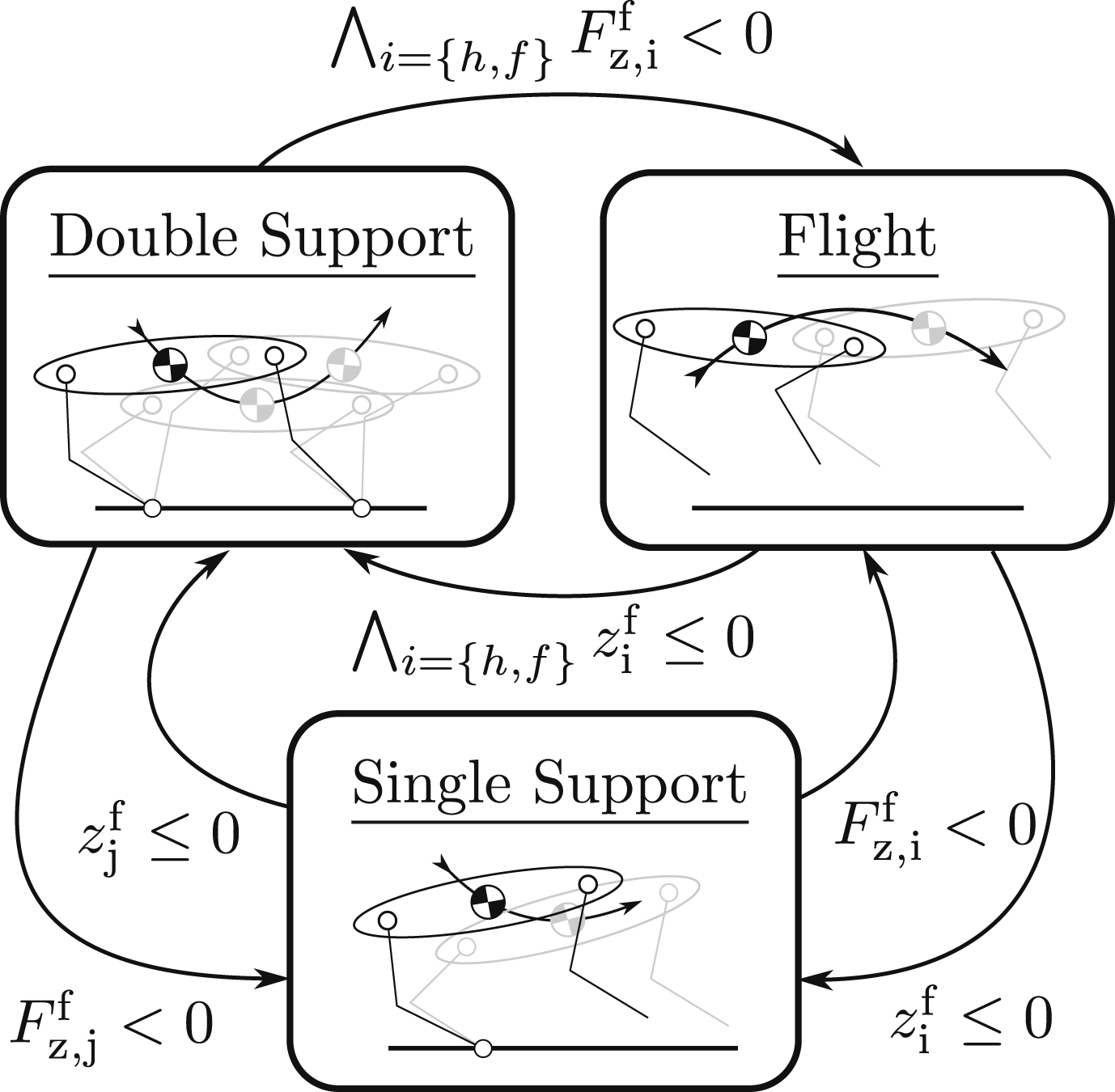

5.1.3.1. Double support phase
During double support, both feet are in contact. The trunk dynamics can then be expressed in trunk coordinates using (34)

5.1.3.2. Single support phase
When only one virtual foot is in contact, the robot becomes an open serial kinematic chain. In this case, it is still possible to reconstruct the joint angles

5.1.3.3. Flight phase
When in flight, the trunk follows a ballistic trajectory and conserves its momentum

5.1.4. Loss of global energy conservativeness
The total energy of the reduced-order model is


The loss of energy conservativeness of the reduced-order model (32) is not present in the complete model (27) and (28). In theory, for the full model, the energy stored in its elastic elements is transferred to the leg at the moment of take-off, and it could be used to swing the leg forward. However, from a more practical viewpoint, the energy left in the springs gets quickly dissipated in high-frequency vibrations of the leg due to viscous friction in the joints because the inertia of the leg is very small. Since we want to actively avoid this scenario, we implicitly model this energy-loss feature when looking for energy-conservative gaits to minimize both these losses and undesired leg vibrations.
Other works such as Gan et al. (2018) search for passive gaits of purely conservative models, which typically necessitate mathematical tricks to model the leg dynamics and avoid losses (such as infinitely small foot masses and hip springs). Here, we still seek solutions in the spirit of natural dynamics exploitation, but we constructed a reduced model that, while still being abstract, is closer to the physical mechanism. In particular, by removing the dynamics of legs in the air, the search for gaits does not rely on oscillations that can only be very hard to realize in practice. The price to pay for these non-conservative models is that the manner in which the energy can be lost limits the set of energy-conservative solutions. Since Uk is a quadratic, positive definite function, it follows that ∂Uk/∂x|x = γ(E) = 0. Therefore, the energy loss is linearly independent of any infinitesimal perturbation of the fixed point. In this sense, we can treat the system as “locally linearly conservative.”
5.1.5. Definition of the locomotion control inputs
For the planning and control of gaits, we introduce a flight phase input Locomotion phases showing inputs for each phase: the legs are regulated to the attack configuration 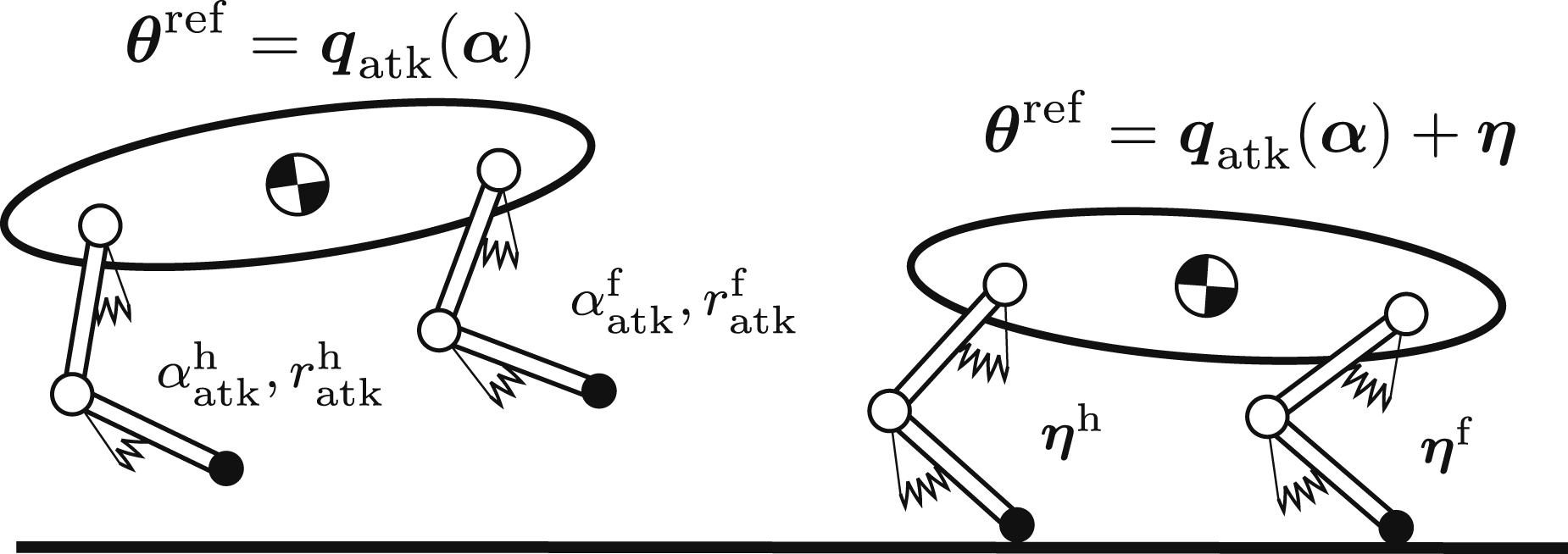
5.2. Energy-conservative gaits (or passive gaits)
In the case of locomotion, the natural dynamics originate from the interaction of masses, springs, and gravity. To exploit the natural dynamics, we focus our attention on the periodic solutions of (27) in the energy-conservative case that does not require control effort, that is, we seek gaits where the motor positions
5.2.1. Definition of the Poincaré section
Similarly to other works (Gan et al., 2018; Remy, 2011), we define a convenient section Σ during the flight phase as


A gait is a periodic orbit identified by a fixed point of For locomotion, we are interested in gaits that fully exploit the natural dynamics, that is, open-loop unforced autonomous solutions that eliminate the need for unnecessary compensations of the dynamics. Mathematically, using the input definition in Section 5.1.5, we are looking for fixed points of the kind

5.2.2. Generation of a family of passive gaits
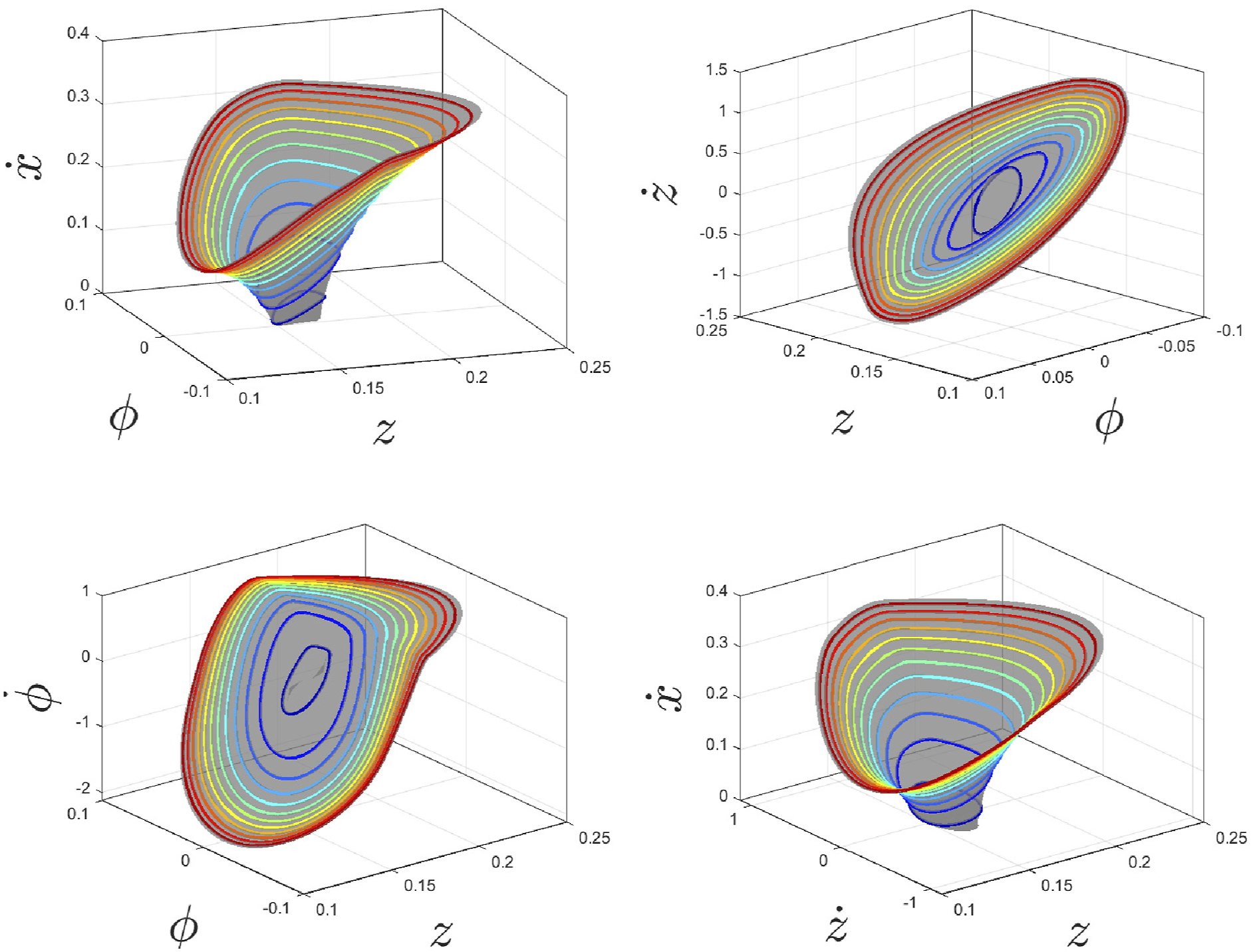
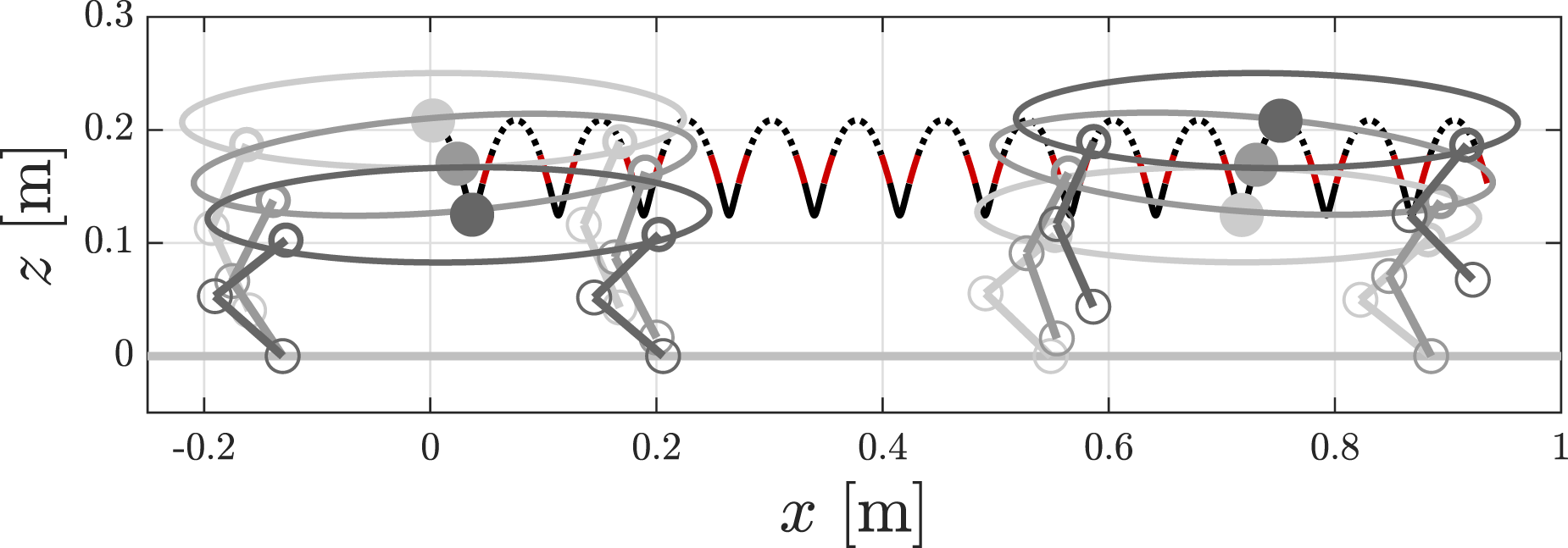
We now look for passive gaits of the quadruped model by finding the initial condition Results of the energy continuation algorithm. Upper plot: The curves represent the fixed points belonging to a family of passive gaits parametrized by energy. Lower plot: Average forward speed and period T of the oscillations. State space projections of the natural motion manifold of the elastic quadruped found by energy continuation. The manifold is depicted with color-coded orbits of increasing energy. Each orbit represents a passive gait. Example of a passive gait belonging to a natural motion manifold, with snapshots of the trunk showing the motion from full flight (dotted black line) to double-support (solid black line) and vice versa. Single support phases are depicted with solid red lines.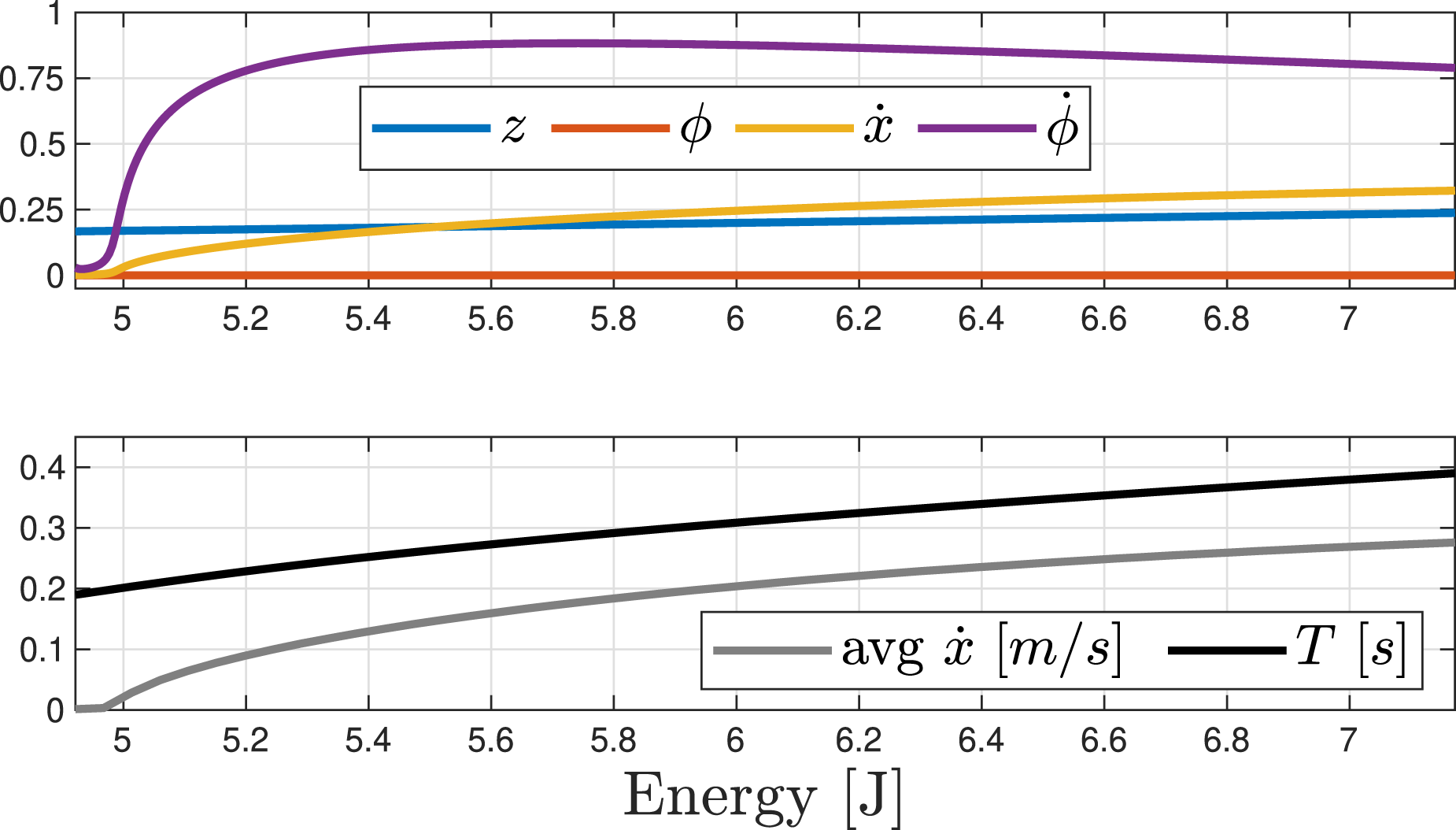


Different from the setups proposed in Gan et al. (2018) and Raff et al. (2022a), the attack configuration is part of the optimization as a parameter (as opposed to the initial state of the legs). When looking for passive gaits, a typical approach consists of optimizing the initial condition (the state) (Gan et al., 2018), and relying completely on the passive dynamics to find a gait. However, practical experimentation with lightweight legs (see, e.g., Calzolari et al. (2022)), which is a fundamental design feature for efficient quadrupedal robots, has shown that relying on the passive swing dynamics of the leg during its aerial phase is not a robust approach, for example, any model mismatch and dissipation will heavily affect the swinging motion. As a consequence, the stability of the gait is very fragile. A more reliable approach consists of choosing a fixed attack configuration, which is held during the flight phase until touchdown. This allows us to look for more robust solutions and, at the same time, removes the necessity of modeling leg dynamics.
5.3. Controller design
Passive gaits studied via conservative systems are generally unstable (Iqbal et al., 2014; Remy, 2011), with limited stability within specific forward velocity ranges as observed in an analysis of an elastic quadruped (Poulakakis et al., 2006). Additionally, energy is typically lost during the motion due to various sources of dissipation, such as impacts and friction in the robot joints and between the feet and the ground, which further complicates the control of these solutions. Therefore, there is a need for both a stabilization and an energy re-injection mechanism to physically realize the passive gaits and exploit the natural resonance behavior.
5.3.1. Control derivation
We apply the control method presented in Section 4, and we utilize the flight phase for stabilizing the gait, while the stance phase serves for energy injection. The reason behind this choice is explained in the following. For analysis and experiments, we focus our attention on a particular class of quadrupedal robots equipped with soft springs in series with the actuators. A consequence of this setup is that the torque control bandwidth is very limited compared to the duration of the stance phases. This inherently hinders the reliable stabilization of orbits during stance phases via feedback control. Consequently, it is more straightforward to rely on the regulation of the attack configuration during the flight phase (which can be achieved more precisely), while the stance phase focuses on re-injecting energy.
Given the inputs

5.3.2. Stabilizer
Stabilization of the gait manifold is achieved via corrections of the attack configuration during the flight phase, that is, the controller utilizes Δ



5.3.3. Energy controller
During the double support phase, the system is fully actuated, and we can reliably inject energy by commanding the motors to quickly insert potential energy into the springs. The offset


Finally, the energy controller is constructed by treating
Globally, modifying the attack configuration during flight (or the motor offset during stance) can lead to energy loss (Section 5.1.4). By avoiding this condition in both planning and control, that is, by staying close to the manifold, we not only avoid wasting energy, but we also avoid in-flight leg vibrations, which can deteriorate performance.
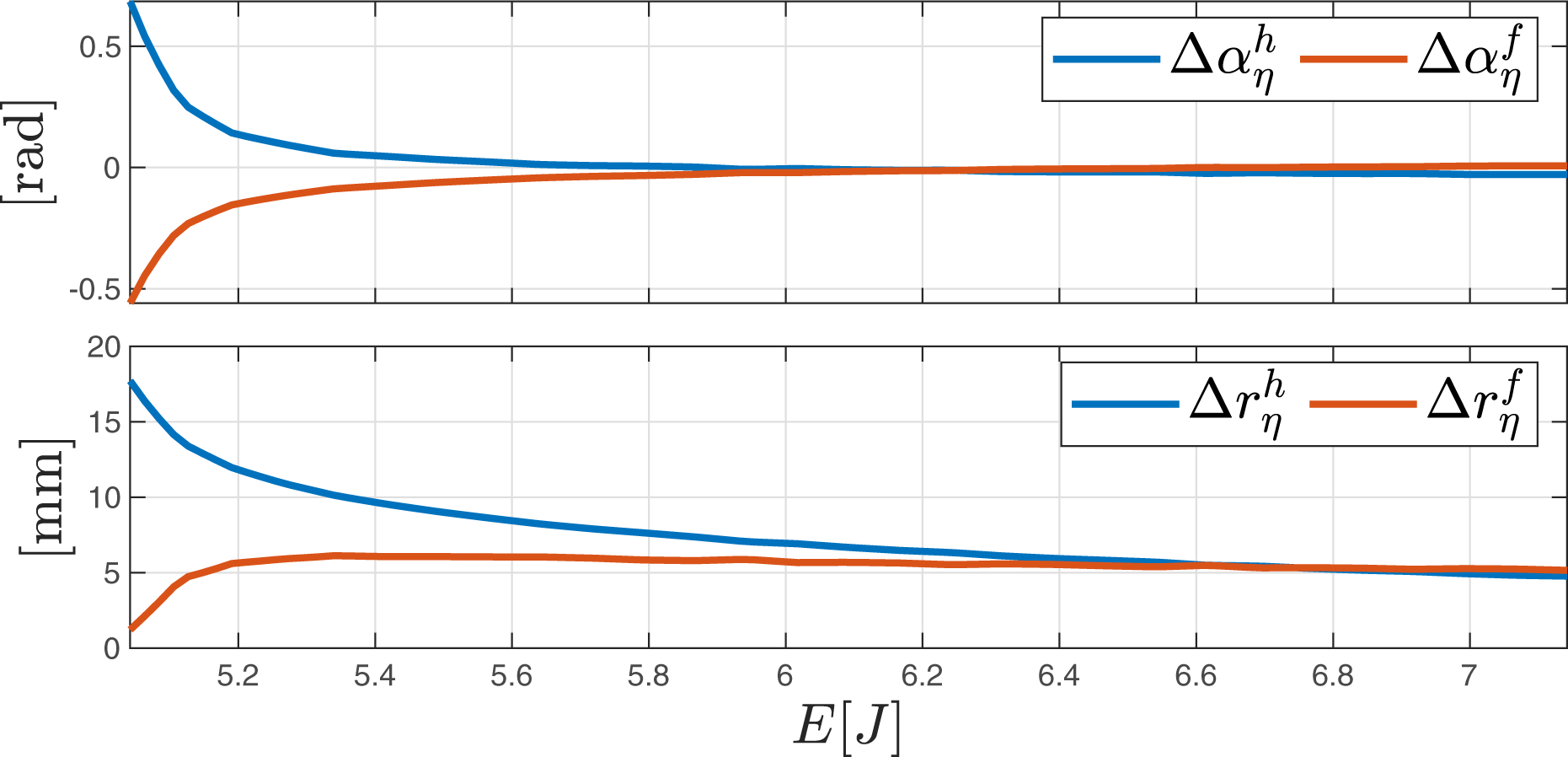
5.3.4. Practical implementation of the controllers
For the implementation of (45) and (49), the gain

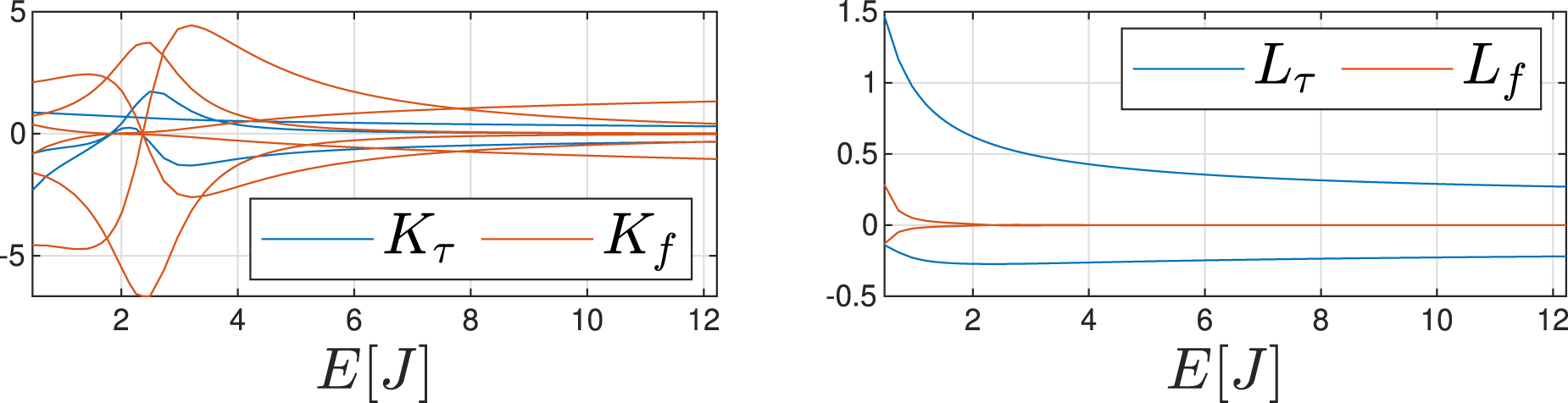
Figure 14 reports the elements of the stabilization gain Elements of the control gain matrix Motor offset η (here reported in polar and radial components) required during the stance phase to increase the energy of the oscillation by 1 J. The offset is found through (44) and (49). The direction of this vector is a function of the energy: this is required to allow energy injection along the curve γ without leaving it.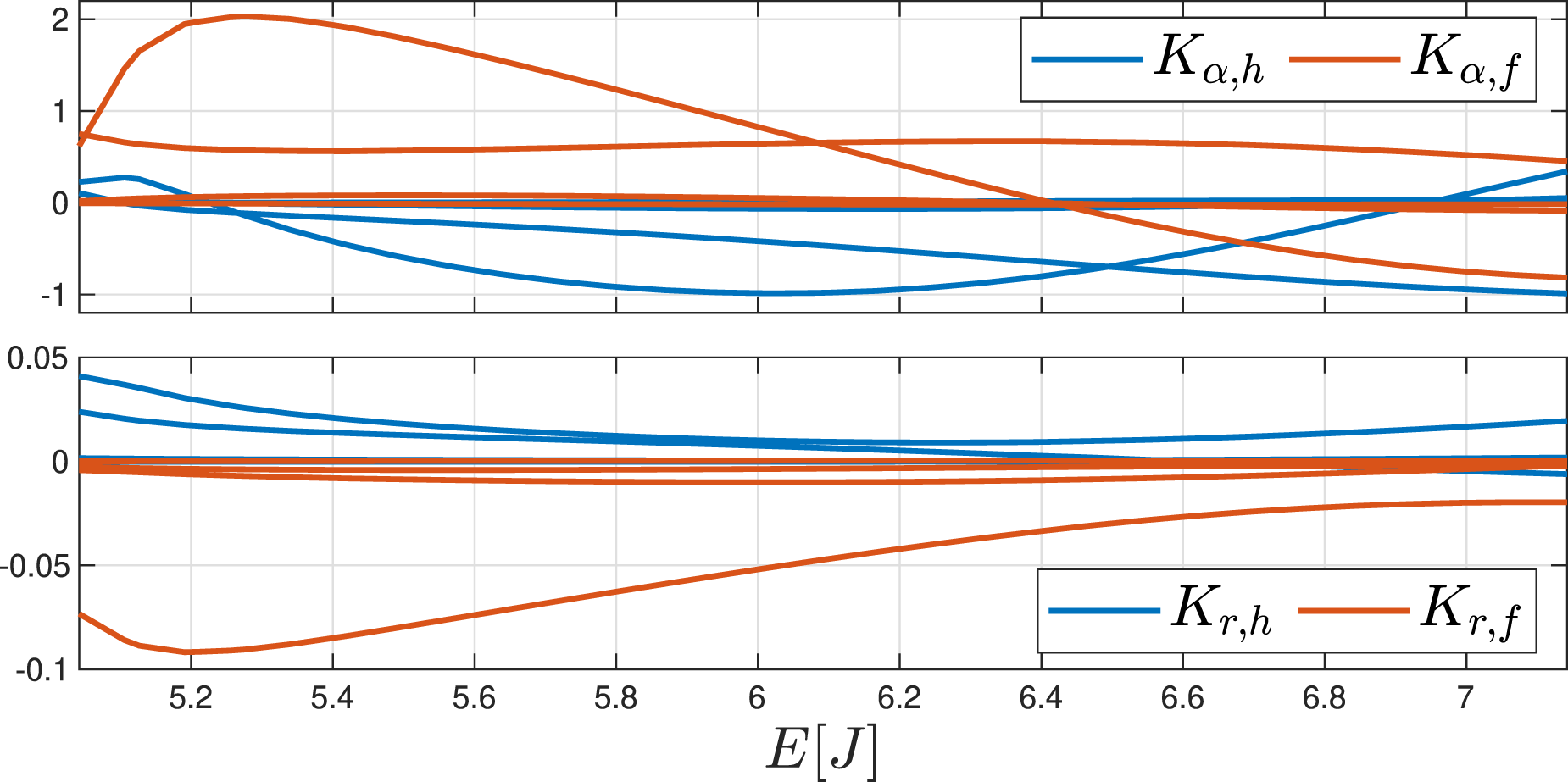
5.4. Simulations
We perform simulations of the reduced order model (32) under the controllers (45) and (49). We present three different cases to validate and illustrate the features of the controllers.
5.4.1. Stabilization
The system is initialized outside of the gait manifold on an initial state that is not a fixed point. The task of controller (45) is to stabilize the system to γ. Figure 16 presents the simulation results. In about three steps, the DLQR stabilizes the transversal coordinates to zero. The robot converges to a gait on the manifold and remains on it. Evolution of the system towards the gait manifold from an initial condition outside of it. The DLQR stabilizes the transversal coordinates in a few steps, and the system convergences to γ.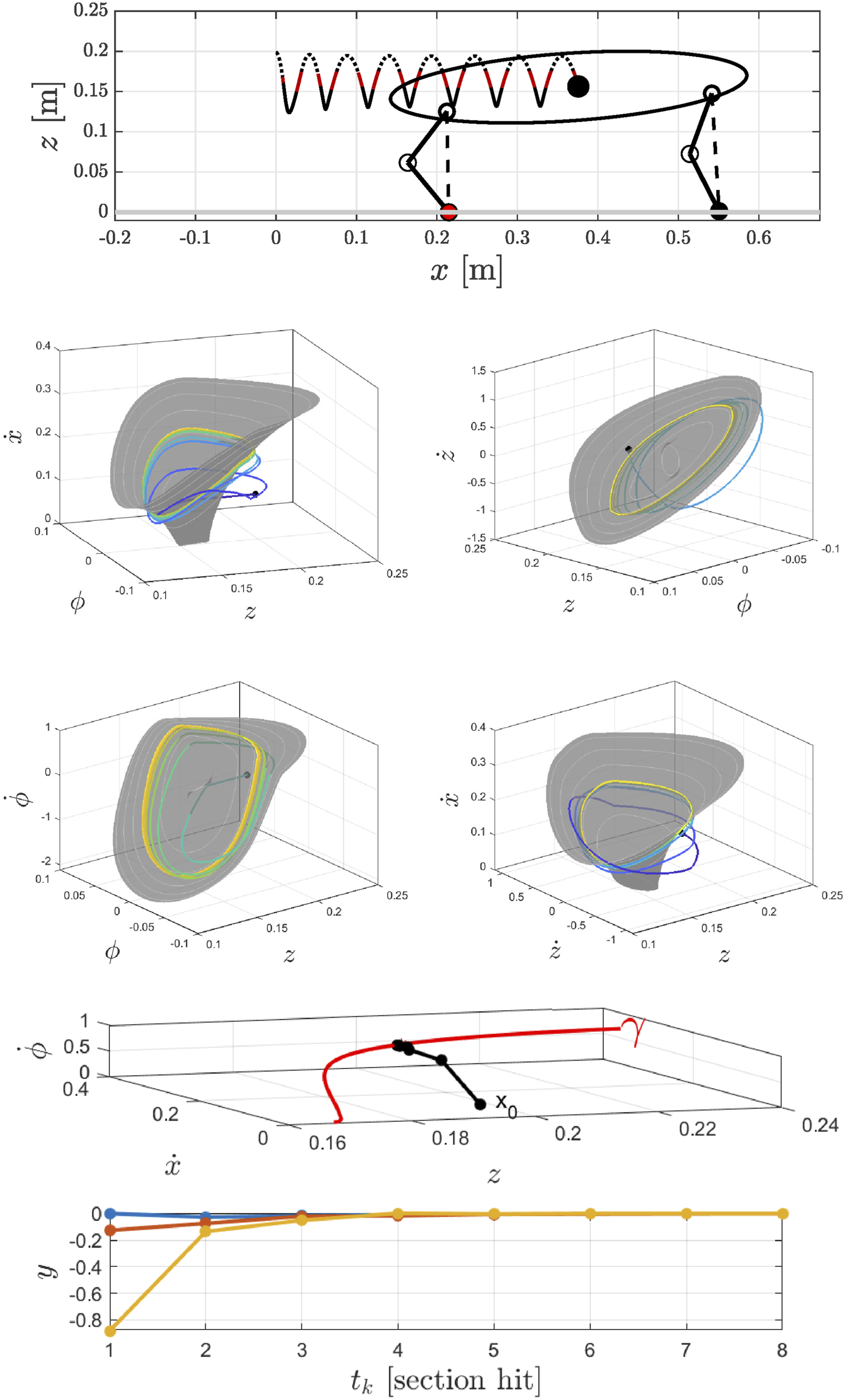
5.4.2. Reaching an energy target
In this instance, the robot is initialized on the manifold at E = 5.1 J, and we provide a desired energy target Ed = 6.5 J to be reached. Here, (45) and (25) work together to climb up the manifold and reliably reach the gait at a higher energy (and thus forward velocity). For the energy injection, we set gains β = 1, ρ = 0, and we saturate the amount of injected energy per stride to 0.1 J (to showcase the energy-climb up of the NMM). Figure 17 presents the results of the simulation, consisting of snapshots of the robot, the evolution along the manifold, and the evolution of the energy and the transversal coordinates. The targeted energy level is attained with minimal perturbation of the transversal dynamics. Projections of the gait manifold and evolution of the energy and transversal coordinates for the convergence to a target energy level.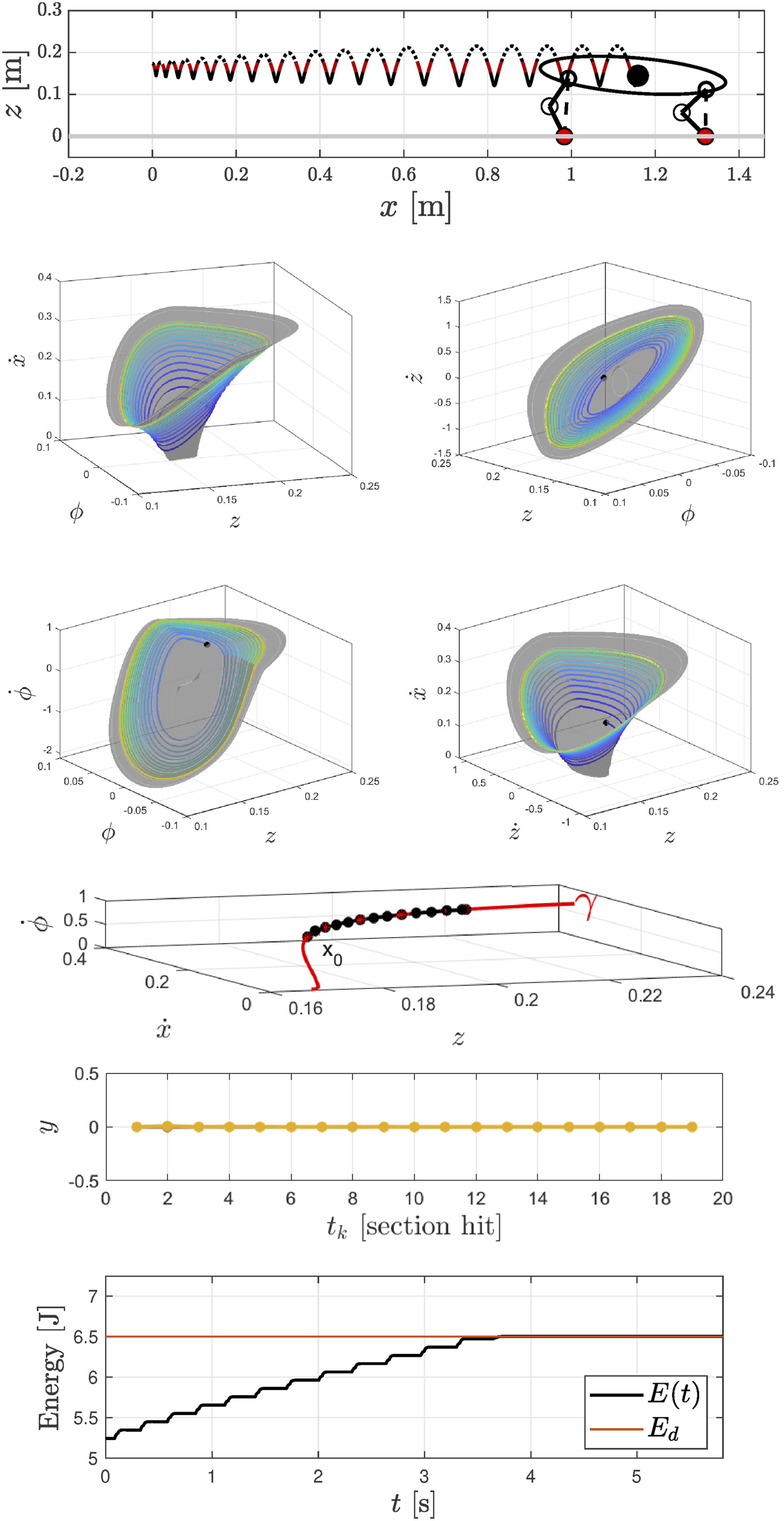
5.4.3. Case with friction losses
Finally, we present the case in which we include joint friction losses. Friction forces are modeled as viscous friction Stabilization and excitation of the gait manifold to reach an energy target under joint friction energy losses. In this case, an integral action is required to converge and sustain the gait at the desired energy. Due to the effect of friction (which acts as a disturbance), the transversal dynamics stabilize in a neighborhood of the manifold.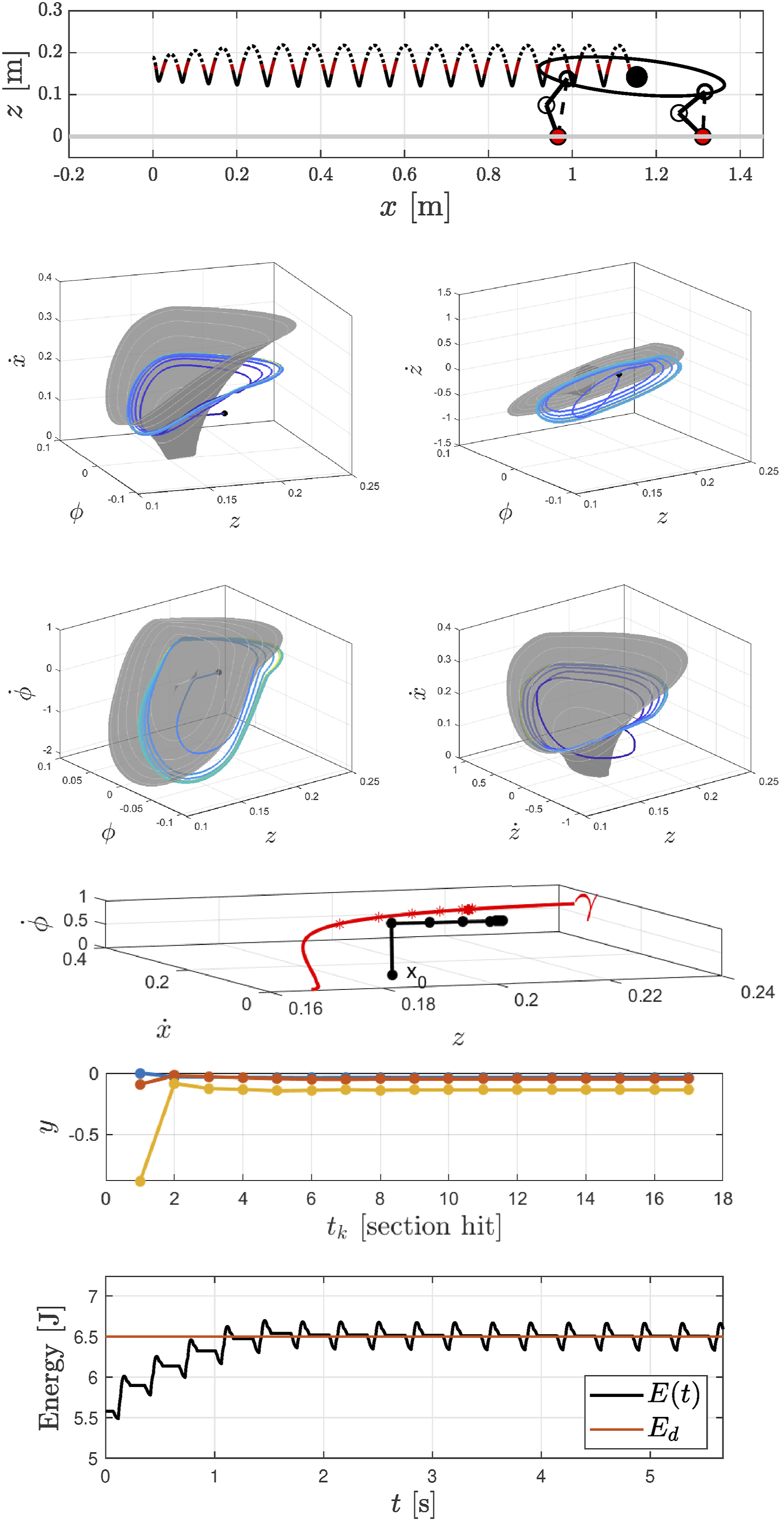
6. Experimental validation
6.1. BERT: A low-budget soft serial elastic quadruped
The quadruped robot BERT (Seidel et al., 2020) used for the experiments is presented in Figure 1. The robot features 2 DoF per leg, that is, there is no out-of-plane shoulder joint, therefore, the robot is mainly limited to sagittal motions. Each joint is equipped with a serial elastic actuator, which features a steel spring. The actuators are simple brushed DC servomotors that are controlled in position mode via an internal PID. Each SEA features two encoders: one for the motor output shaft θi and one for its joint position qi. The leg kinematics, SEA designs, and experimental setup are presented in Figure 19. Additionally, the robot is equipped with an IMU, which provides the absolute orientation of the trunk, rotational velocity, and linear accelerations of the trunk’s COM. The kinematic and dynamic parameters are presented in Table 1. Upper Left: Side view of the BERT robot with its kinematics superimposed. Upper Right: Leg prototype implementing serial elastic actuators. A belt drive system decouples knee and hip joint motion (Lakatos et al., 2018). Bottom: Experimental setup consisting of a treadmill and a marker-based tracking camera system. Robot parameters.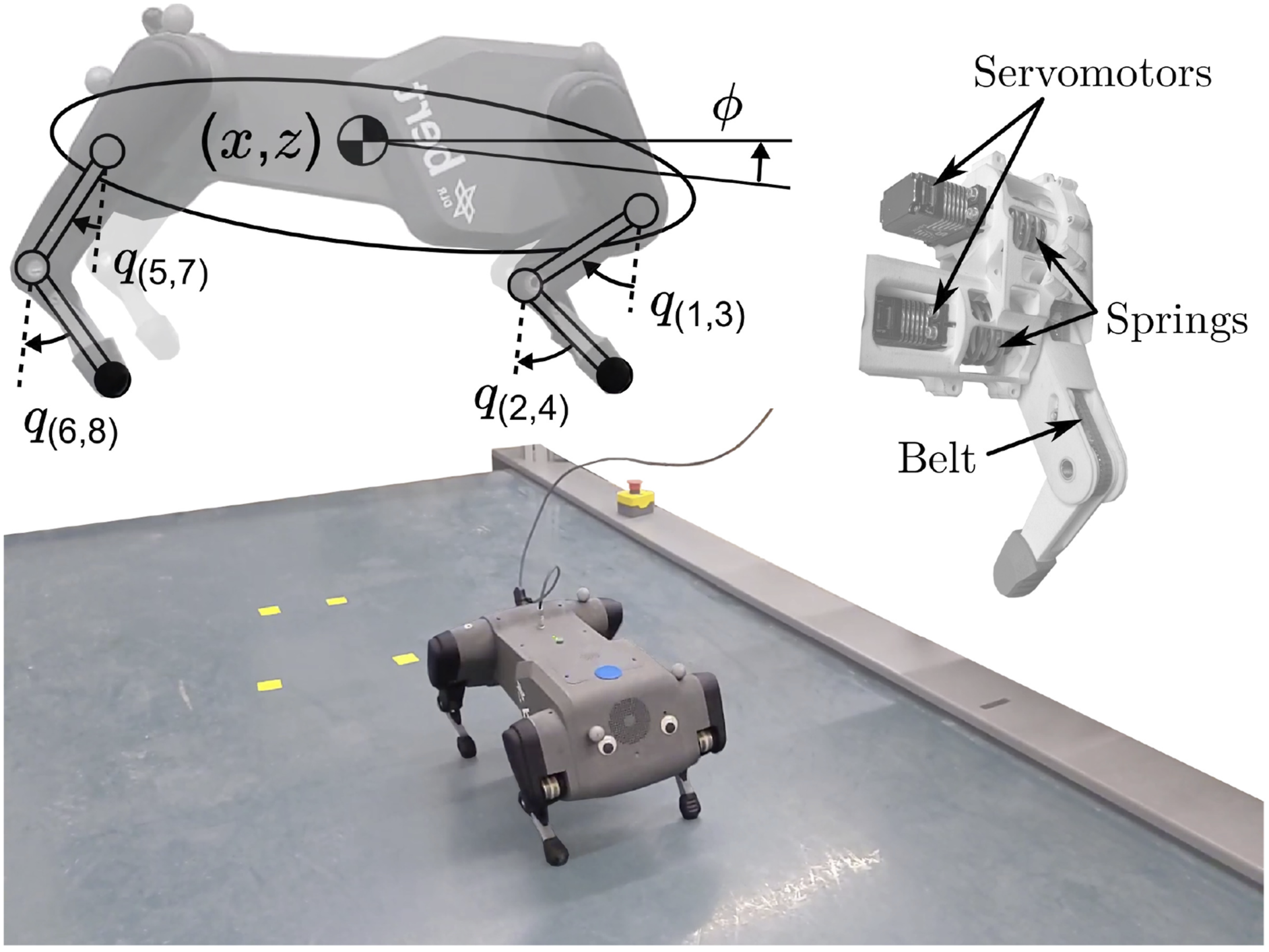
6.2. Experimental setup
Experiments are carried out on a treadmill, and data is recorded using a tracking camera system using markers on the robot. The data tracking runs at 60 Hz, and it is used to regulate the treadmill’s speed to match the robot’s forward velocity, but it is not used for feedback in the robot controller. A steering controller is implemented to prevent the robot from falling off the treadmill due to its lack of shoulders. This controller induces a slight roll rotation of the robot’s trunk (
6.2.1. Trunk state estimation
Using the springs as torque sensors (by measuring the deflection
6.2.2. Identification of a natural motion manifold
Using the parameters reported in Table 1, we apply the methodology presented in Section 5 to model the robot, obtain an NMM, and design the proposed controllers. After validating the controllers in simulation, we encountered a kinematic limitation during preliminary hardware experiments. This limitation, caused by hard joint end-stops, prevented the realization of high-energy gaits. To meet the leg kinematic limits, the gaits are studied for a system with a 25% higher inertia with respect to CAD model estimations 10 . Figure 12 presents the resulting family of autonomous oscillations for the energy range between 4.8 J to 7 J.
6.2.3 Tuning of the controllers
We use the same DLQR gains and feed-forward injection profiles as presented in Figures 14 and 15, respectively. The saturation bounds for the output of the stabilizer (presented in (50)) are set to ±0.05 rad for the attack angles, and ±2 mm for the attack lengths. For the energy controller, the gains are tuned to β = 2.5 and ρ = 0.25.
6.2.4. Energy and apex estimation
Estimations of the energy and the upper apex of the COM trajectory are necessary for stabilization and excitation of the gait. However, they are challenging to reconstruct accurately and robustly. In our case, the most reliable way to estimate the energy was to evaluate it during double support (where we can rely on joint measurements) and hold the estimated value constant during the other phases. To robustly estimate the upper apex (the Poincaré section hit, used by the stabilization controller) we use the upper apex of the previous stride, which is retrieved by detecting when
6.3. Experimental results
We present experiments for two cases.
6.3.1. Controlling to energy targets
In this experiment, the robot starts still on the treadmill (with stand-still energy due to gravity ∼ 4.8 J), and the desired energy Ed. is set to an initial value E1 = 5.5 J, which roughly corresponds to an average forward speed
11
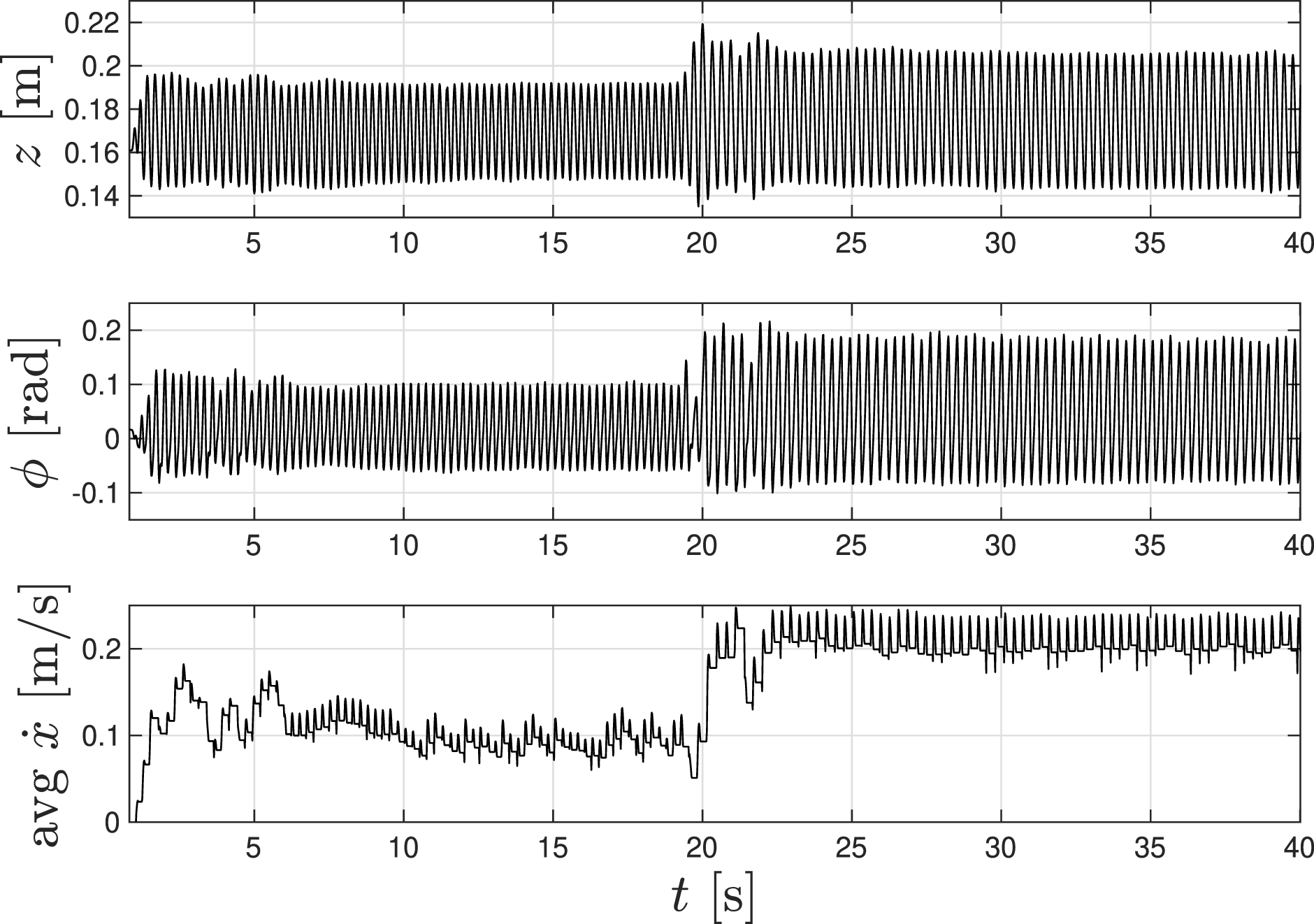
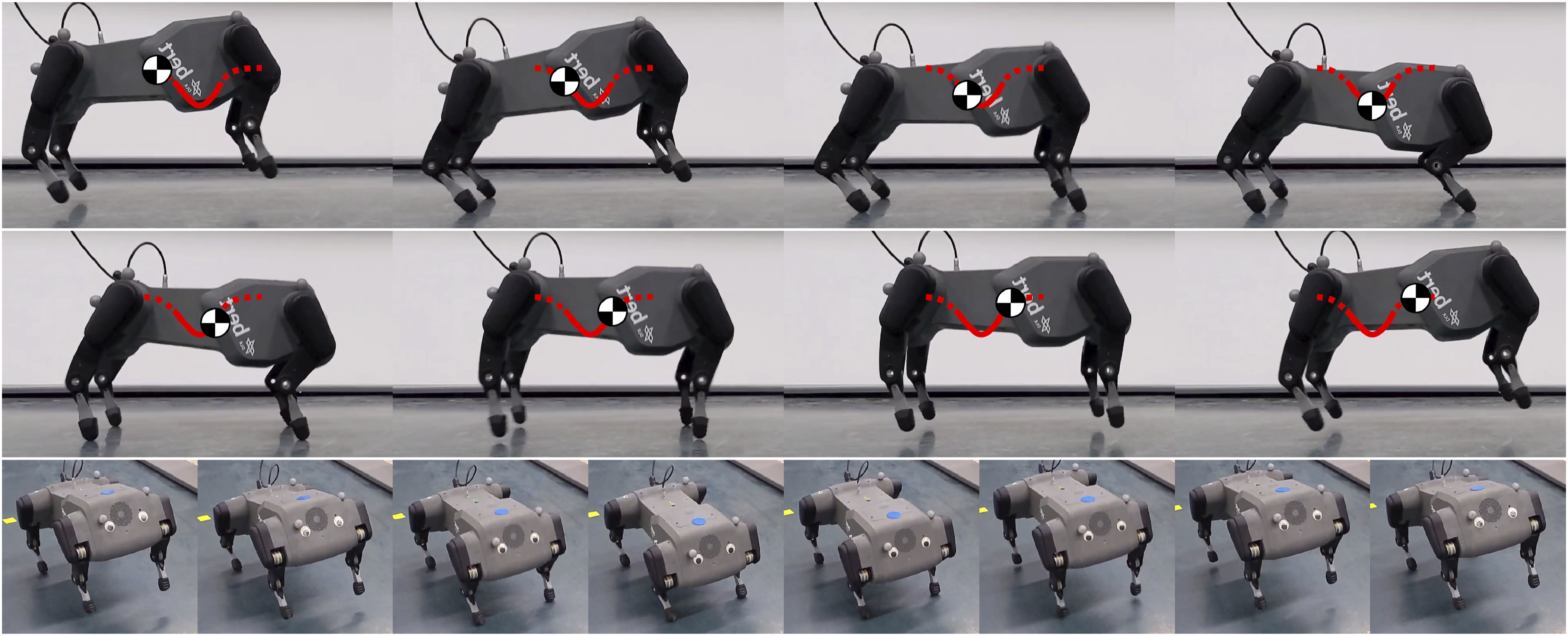
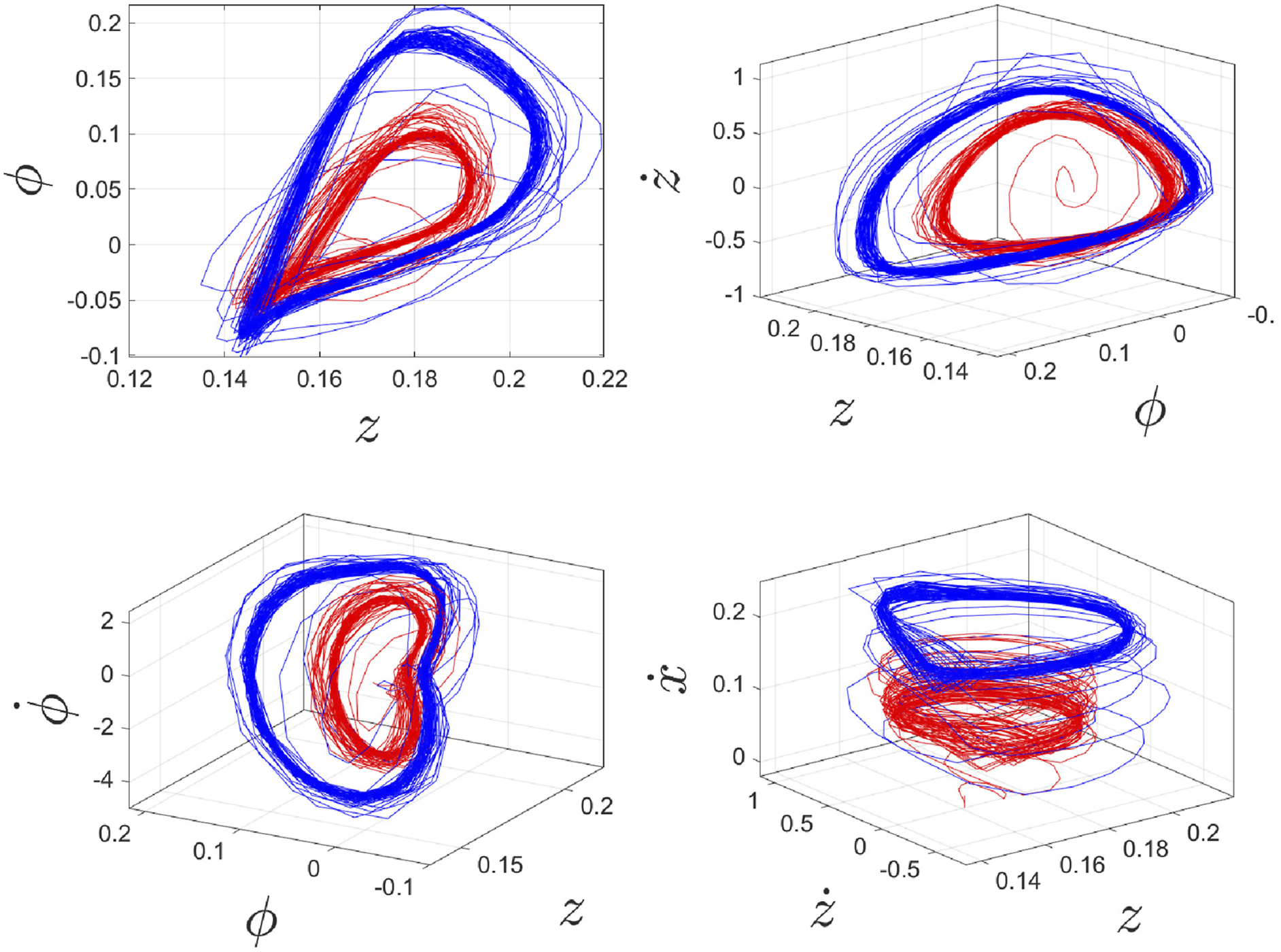
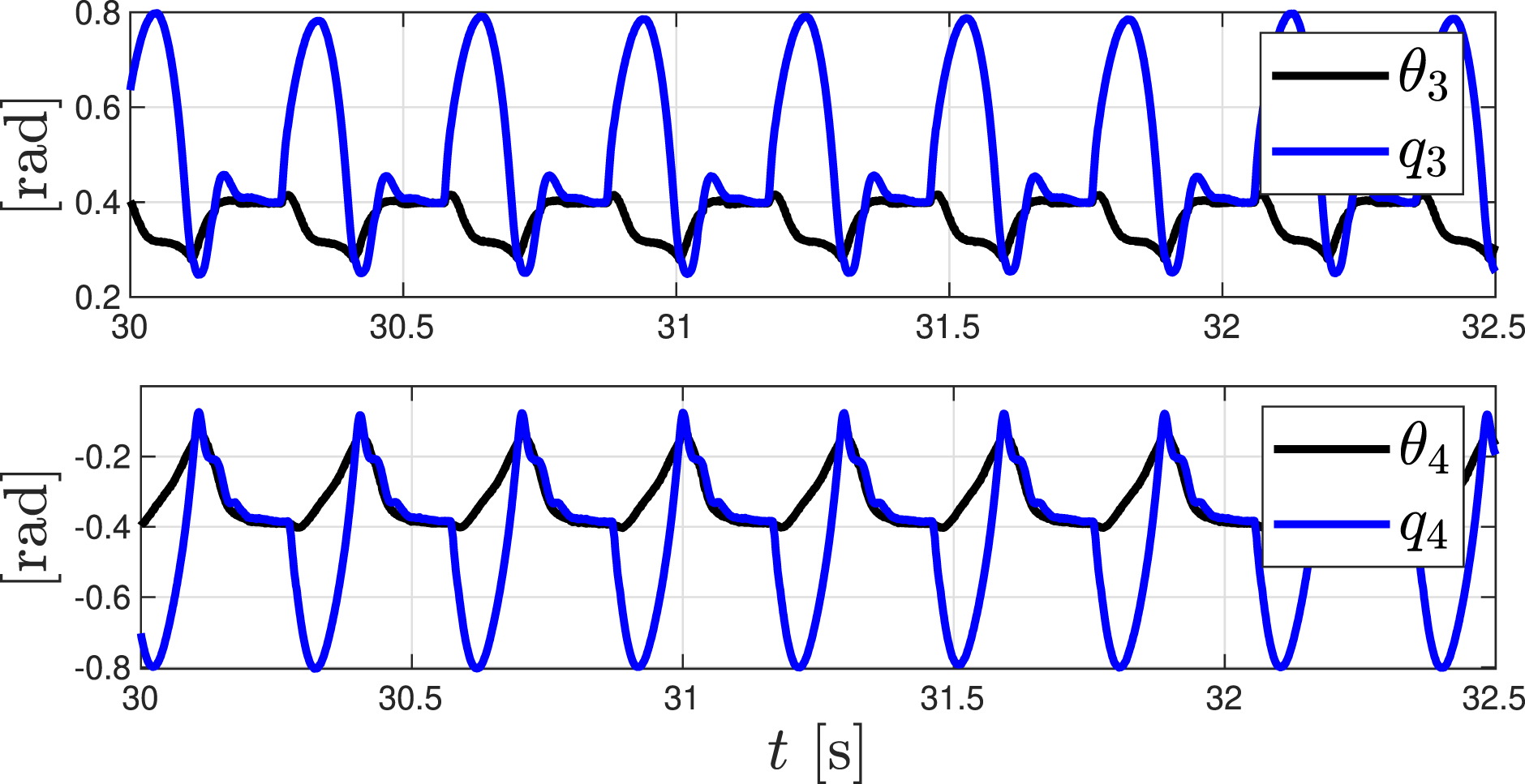
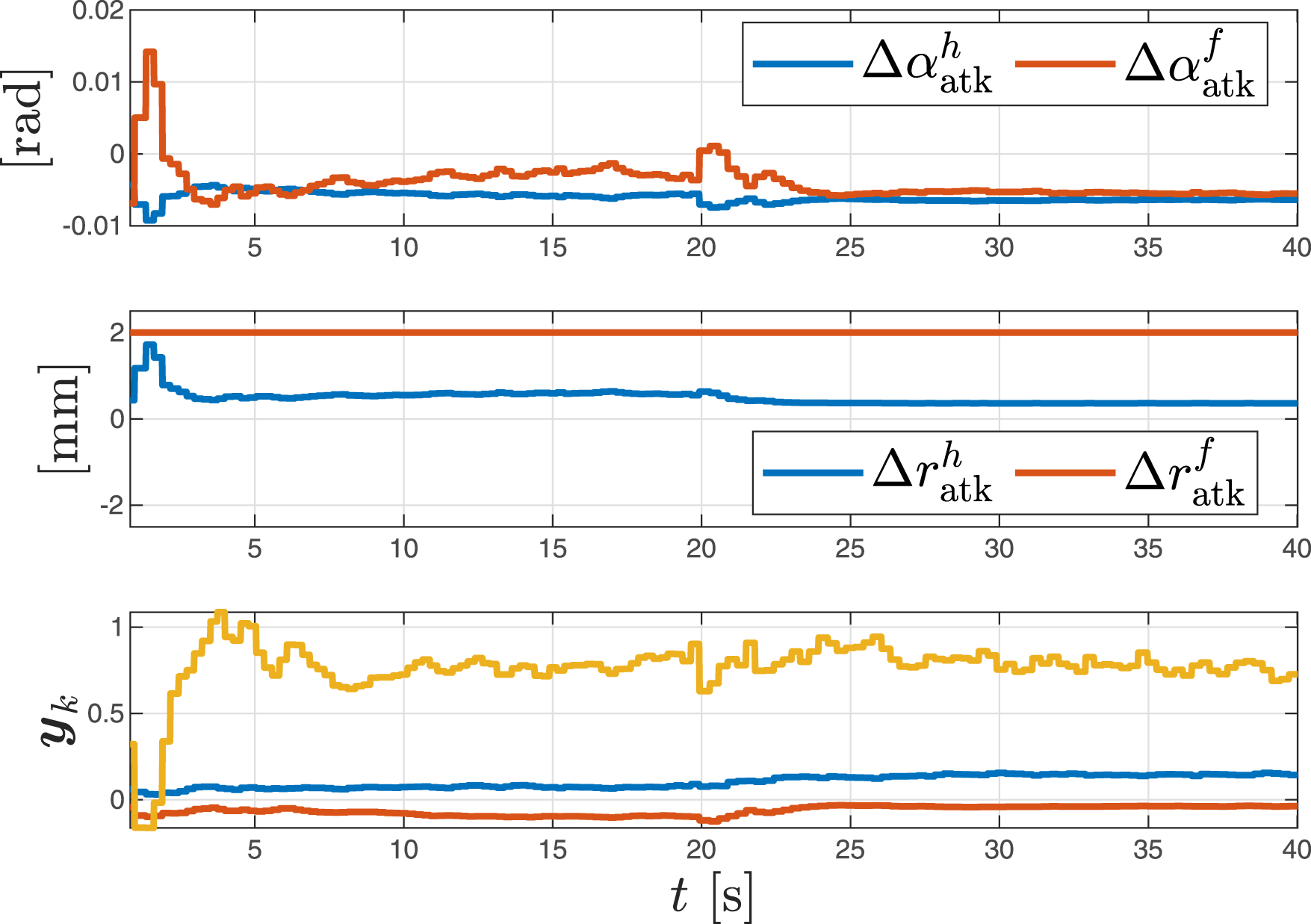
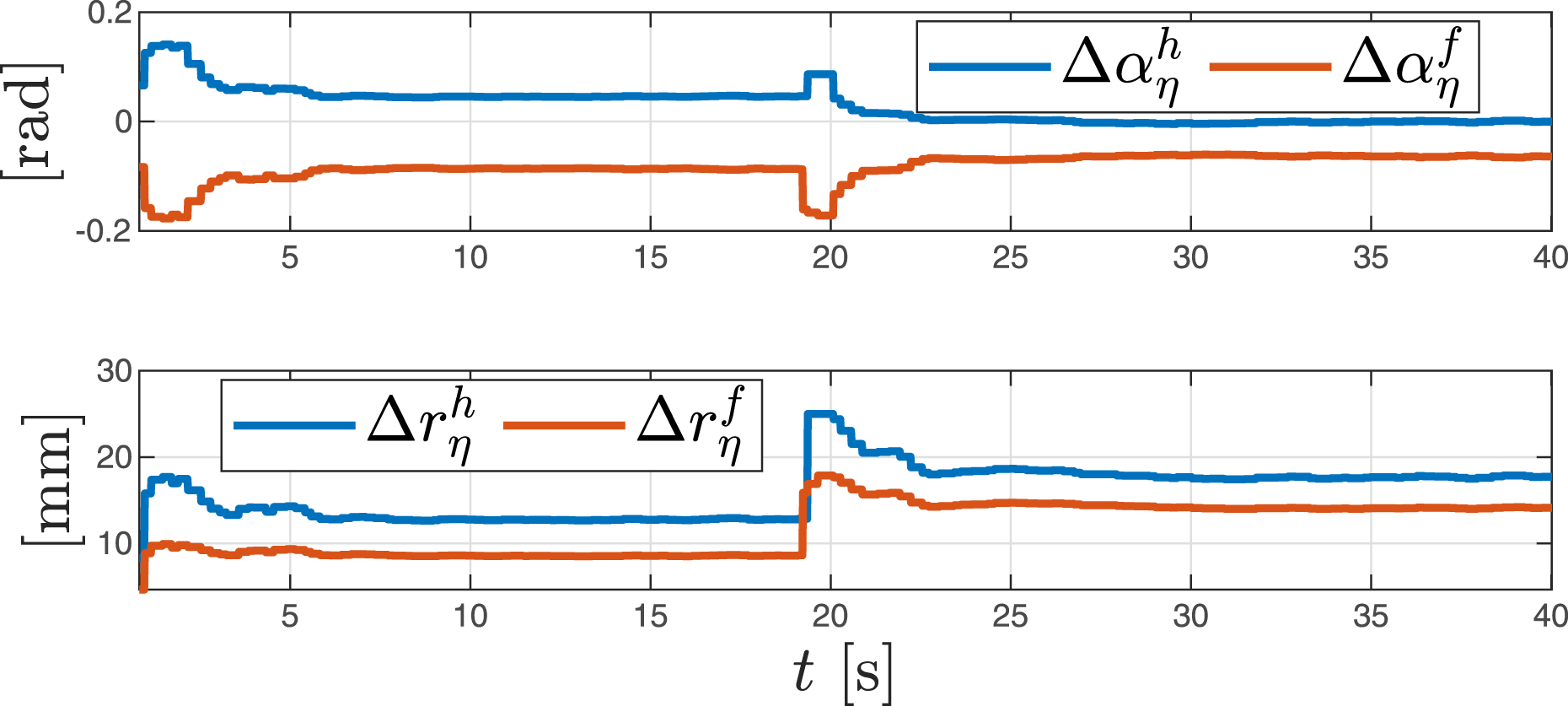
∼0.14 m/s. After a short transient, the robot stabilizes and runs at E1. Then, the desired energy is increased to E2 = 5.9 J (average ∼0.20 m/s), and the system converges to it in a few seconds, gaining speed. Figure 20 reports the time evolution of the measured mechanical energy against the target energy, while Figure 21 presents the tracked COM height and trunk orientation, together with the reconstructed forward velocity. Snapshots of the robot performing the gait at E2 are presented in Figure 22. The projections of the recorded evolution of the trunk state during the experiment are depicted in Figure 23. Additionally, the measured motor positions against the angles of the corresponding joints for one leg are reported in Figure 24 for a time interval after the robot stably converged to running at the energy E2. Finally, the recorded outputs of the stabilization and injector controllers are presented in Figures 25 and 26, respectively. Evolution of the measured mechanical energy against the target energy. The target energies are color-coded. An estimation for the energy (Raw, solid gray) is calculated using the joint and IMU measurements. The value of the energy used for the controllers (Filtered, solid black) is obtained by low-pass filtering the estimated value, which is updated at the end of each stride. Recorded trajectories of the trunk height and orientation, and of the reconstructed and averaged forward velocity. The measurements demonstrate highly regular and robust motion displayed by the robot when performing the identified gait at two reference energy levels. Side and front-view snapshots of the elastic quadruped robot bounding at the desired energy 5.9 J on a treadmill. The side-view shots are reported with respect to a frame solid with the treadmill to highlight the forward motion. The COM trajectory is depicted in solid red for the stance phase and dashed for the flight phase. The resulting motion is highly dynamic and closely resembles the identified passive gait of the reduced-order model. State space projection of the recorded trunk trajectories. The color of the trajectory indicates the energy reference in that time interval (red for E1 and blue for E2, as in Figure 20). The experiments show that a stable and regular orbit is achieved for both energies. These feedback-induced limit cycles do not correspond precisely to the orbits from the manifold evaluated using the ideal reduced model, but they still resemble its shape. This is expected since friction, impacts, and other unmodeled effects affect the motion. The relevant result is that a small excitation designed via the NMM generates regular and predictable resonant motion. Comparison of motor angle against the corresponding joint angle, showing high regularity and large spring deflections. A small motion of the motors is sufficient to excite the system’s natural dynamics and cause large joint and trunk oscillations. Stabilization control errors and output to adjust the attack configuration. Similarly to the results of the simulations with losses reported in Figure 18, in the real scenario, the DLQR stabilizer cannot drive the error to zero due to losses and other unmodeled dynamics. However, the stabilization controller makes the manifold attractive, so that the system settles onto an orbit in a neighborhood of the natural motion manifold, like in the simulations. Radial and polar offsets from the energy regulator. The injection is higher during the transition to higher energy, and it converges to steady lower values when the desired energy level is reached.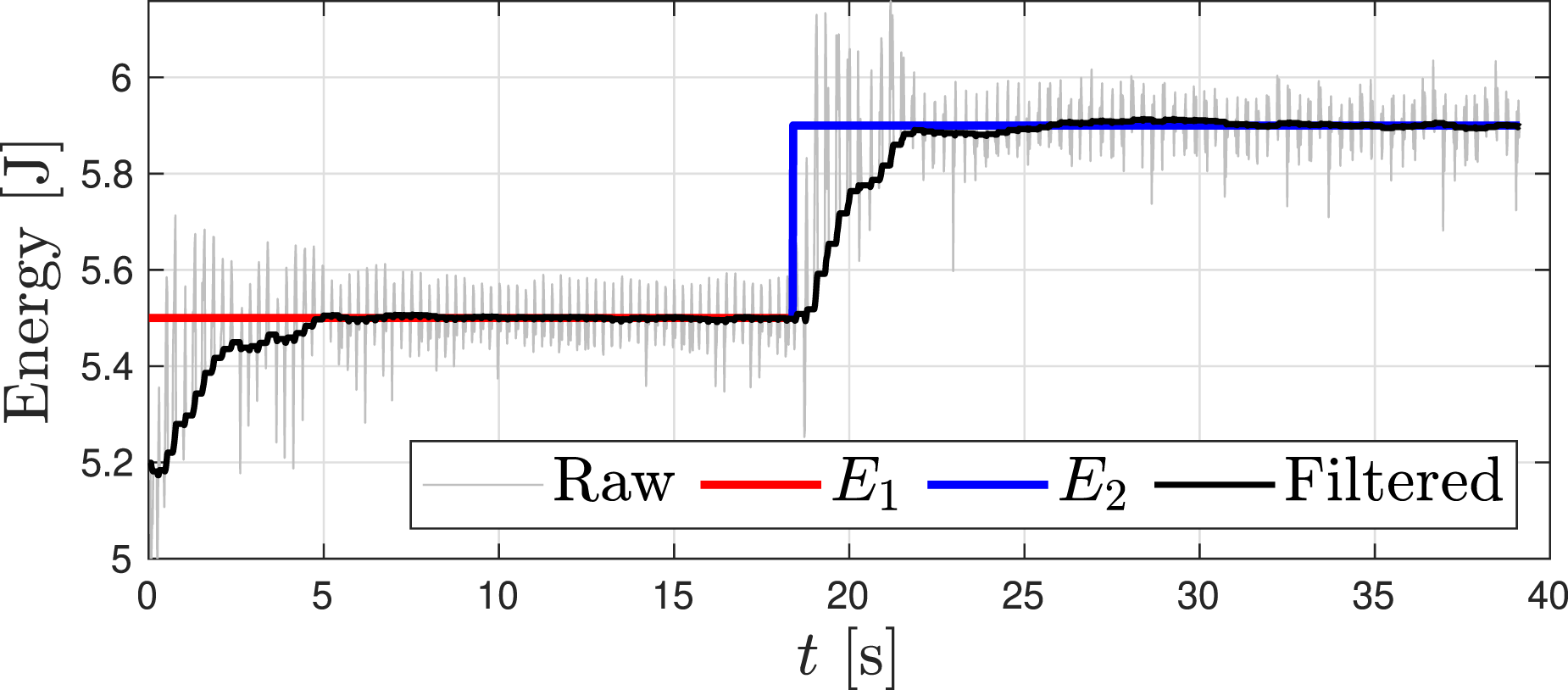
6.3.2. Response under perturbations
A series of heavy flat objects of approximately 1 cm height and 10 cm in diameter are placed on the treadmill while the robot is running at E2. When the robot runs over the obstacles, it is initially pushed away from the current orbit, but it subsequently returns to the original cycle after a transient. The results of the experiment are summarized in Figures 27 and 28, which show the robot recovering from a perturbation over a short time interval. See Extension 1 for the video recordings of the experiments. Experimental recovery from perturbations due to impacts with solid obstacles. The feet of the robot strike the obstacles at t ≈ 26.5 s, disrupting the desired oscillation, and driving the robot to almost jump in place. During the stabilization, the DLQR performs corrections of the attack configuration to stabilize the gait, while the injector manages the energy variations. After a short transient, the cycle is again regular at the target energy. Snapshots of the robot recovering from perturbations: the compliant response of the leg passively absorbs the impact, while the robust excitation controller restores regular oscillations at the desired speed.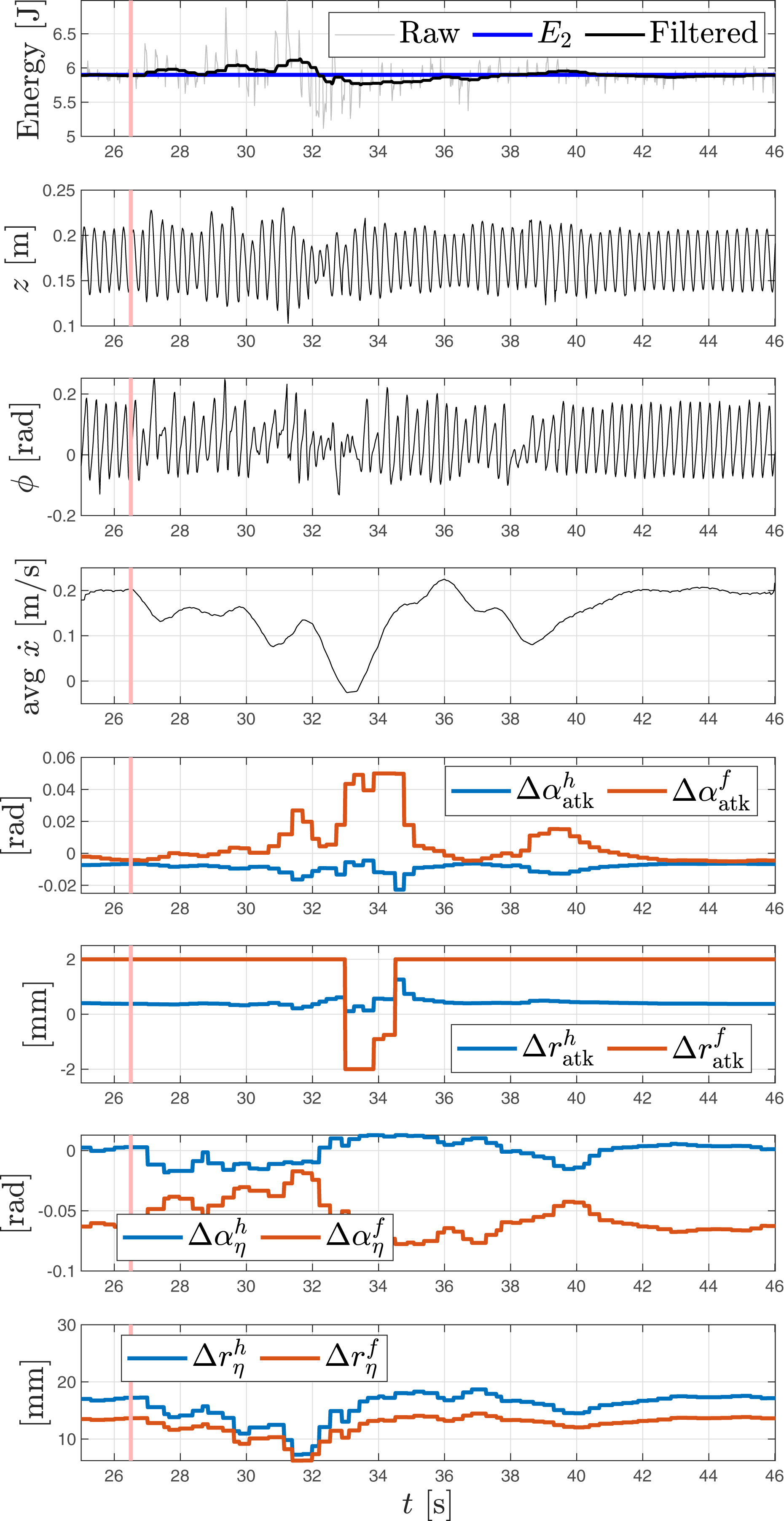

6.4. Discussion
The experiments show that the robot quickly converges to highly regular periodic trajectories, largely taking advantage of the natural dynamical response of the soft elastic elements for the execution of the gait. The regularity of the oscillations of the trunk can be appreciated in Figure 21 and of the joint and motor coordinates in Figure 24. The latter plot also shows that comparatively small motor oscillatory commands (generated from the injector, Figure 26) lead to larger oscillations in the joints and, thus, of the trunk.
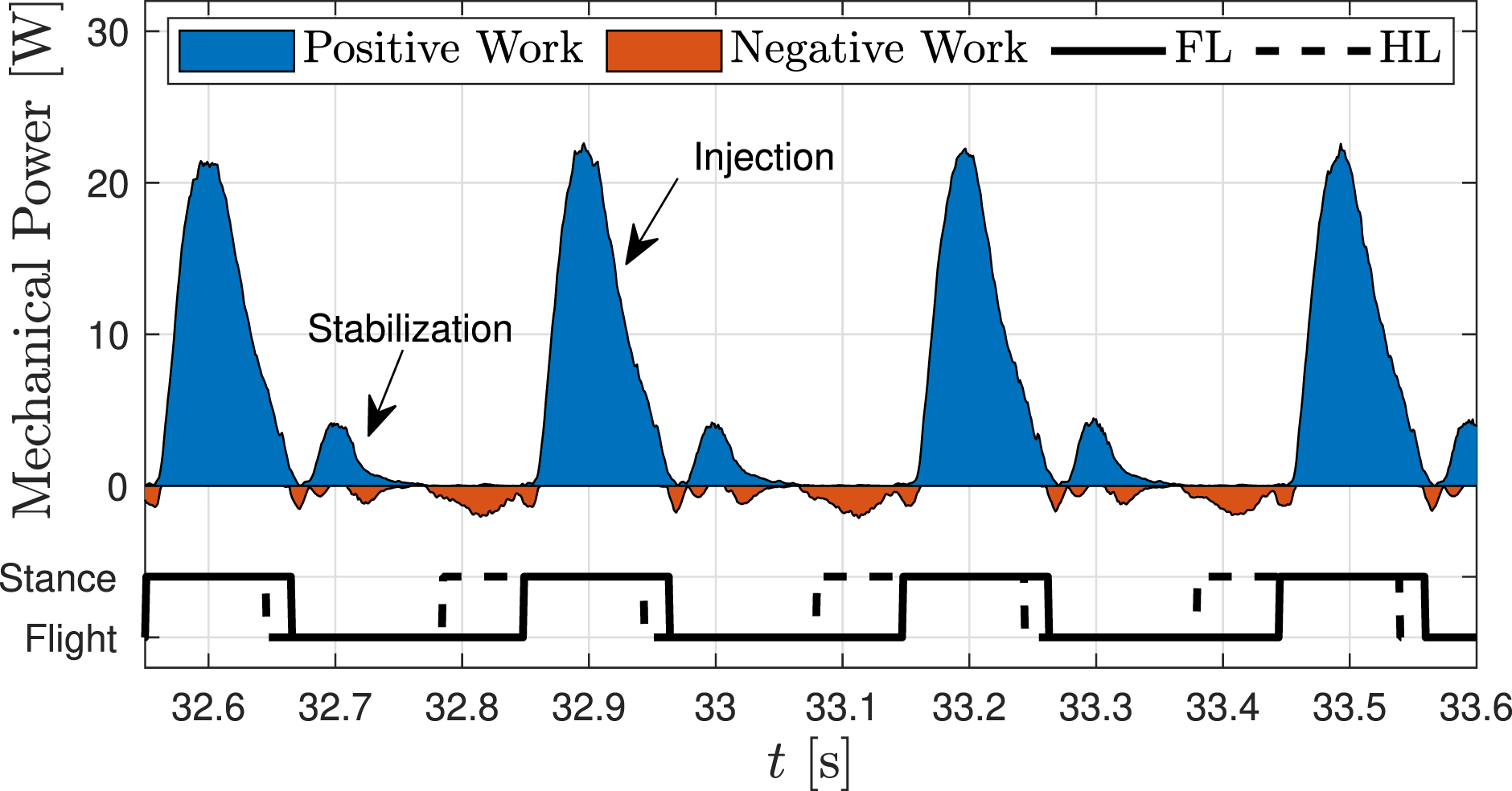
For the i‐th joint, the actuator work can be evaluated as Total mechanical power of the front (FL) and hind legs (HL), demonstrating predominantly positive work performed by the actuators. The respective stance and flight phases of the legs are also reported. For the i-th joint, the power is calculated as 
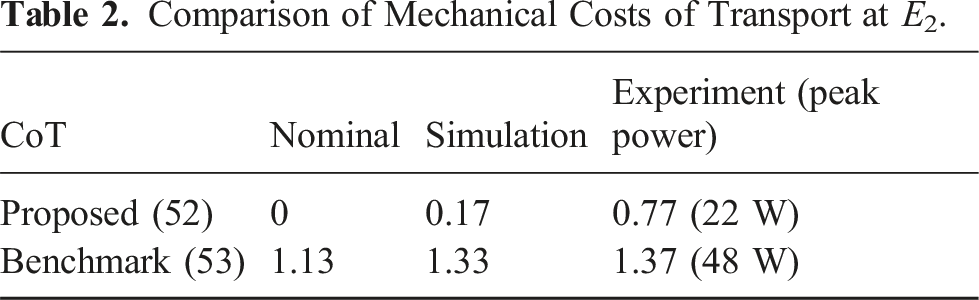
To illustrate the energetic benefits of our approach, we compare the Cost of Transport (CoT) of our method against standard rigid actuation across three scenarios: the nominal case, simulations with dissipation, and experimental results. For each scenario, these comparisons are made while the robot executes the same bounding gait at the sustained energy level E2. We evaluate the CoT for our strategy using the positive mechanical actuator work (Remy, 2011)

Comparison of Mechanical Costs of Transport at E2.
The validity of the natural motion manifold analysis is further confirmed by comparing the oscillation periods extracted from the experiments with the theoretical periods obtained from the passive gaits of the reduced model. This comparison is presented in Figure 30, which displays closely matched oscillation periods for both of the energy levels investigated in the experiments. This outcome is relevant and not trivial because the nonlinear nature of the oscillations results in non-constant, energy-dependent periods. This demonstrates again the ability of the simple reduced model to capture relevant features of more complex dynamics. Oscillation periods of the reduced model’s gait matching the experimental measurements. The nonlinear characteristic of the oscillation leads to a non-constant frequency, which varies depending on the energy level. Despite its simplicity, the reduced-order model can capture and accurately model this feature.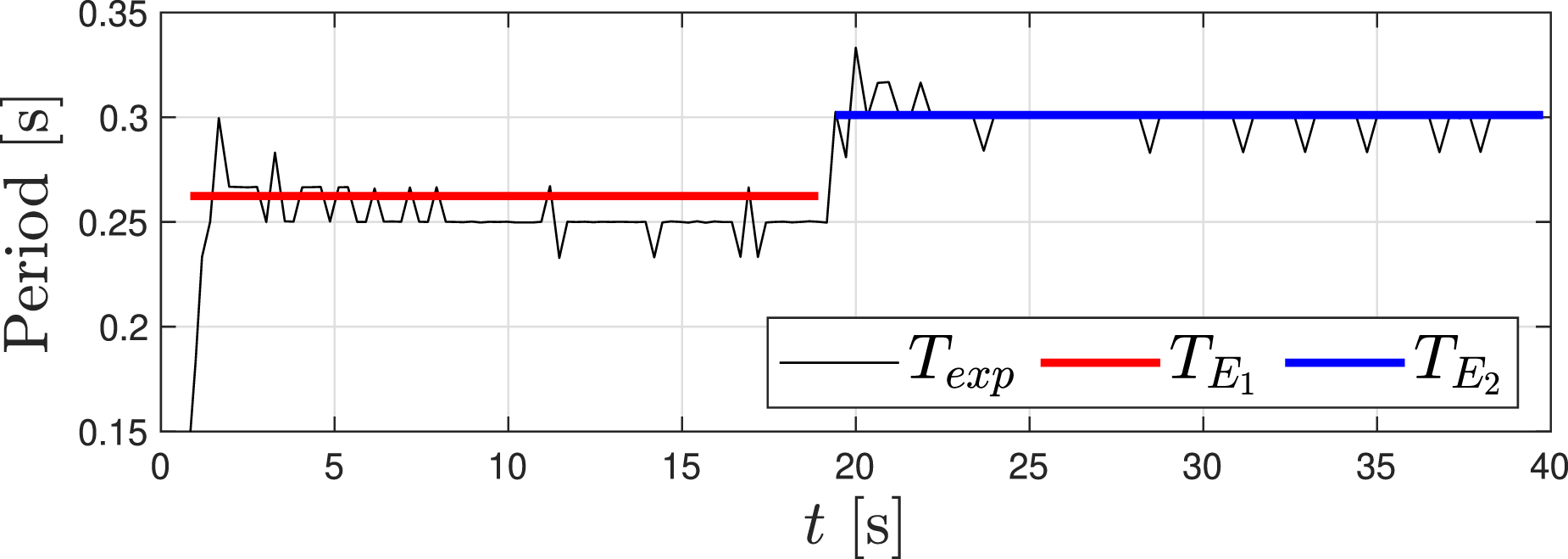
It was observed experimentally that the direction and the magnitude of the motor commands generated by the injector controller had the most effect on driving the desired oscillations, while the stabilizer mainly countered the rise of irregular or multi-periodic behavior, but it is unable alone to correct an inconsistent excitation. The resulting gaits are qualitatively very similar to the passive gaits identified for the reduced model: the foot pattern is the same, and the periods of oscillations match. However, there are some quantitative differences, such as a higher rotational speed of the trunk and a slightly lower forward speed achieved at lower energies. These discrepancies were expected since a part of the unmodeled dynamics (such as friction and impacts between the feet and the ground, which are difficult to model accurately) considerably influence how close the real gaits can come to the passive ones. This can also be seen in the simulations reported in Figure 18, which feature dissipation.
7. Conclusion
Driven by efficiency and robustness arguments for the realization of repetitive tasks, we have introduced the notion of Natural Motion Manifolds and a control method capable of locally stabilizing and exciting these geometrical structures. The proposed controller was derived via the extension of a stabilization method (based on the linearized controlled Poincaré map) from one orbit to a family of orbits. In particular, the controller exploits the intersection of a Poincaré section with a surface comprising autonomous evolutions, thus obtaining a curve used to construct a coordinate system that decouples the transversal and energy dynamics. This drives the system on passive solutions characterized by zero control effort. The method was validated both in simulation and experimentally on a serial elastic quadruped. A bounding gait at a desired velocity was realized without performing dynamic compensations, not even for gravity torques: the natural dynamics were simply excited via small motor commands. The experiments show that the robot takes advantage of the natural dynamical response of the soft elastic elements to execute the gait. To our knowledge, this is one of the first experimental results to demonstrate that an excitation command designed via the natural dynamics generates controlled, predictable, and useful resonant behavior. Moreover, the efficiency of the energy injection principle was demonstrated on hardware. These outcomes provide further insights into the usefulness of energy-conservative oscillations (e.g., passive gaits) for the planning and control of robots and the role of elastic elements in energy regeneration.
In the future, we plan to exploit the bifurcations to switch to different NMMs, thus increasing the flexibility of this idea. In the case of locomotion, high-energy oscillations associated with very dynamic and fast locomotion gaits could be efficiently excited by switching to an appropriate manifold at the right moment. Moreover, since the experimental platform featured only servo motors, which lacked torque control, the control principle should also be tested on different systems, and their efficiency should be investigated. Finally, the optimization of NMMs, such as a co-evolution of hardware and controllers to minimize the cost of transport, should be explored to achieve future enhancements to the already impressive capabilities demonstrated by quadrupeds (Hoeller et al., 2024).
We believe that, for the next technological step, robots must take full advantage of their natural dynamics under both the mechanical and control design aspects. This design philosophy does not limit itself to locomotion, but it should be applied to any robotic system in the pursuit of increased performance and lower costs. This, however, requires the inversion of a standard paradigm in robotics: instead of treating the robot as a generic motion realization machine, the intrinsic capabilities of a robot should be identified first and then fully exploited to realize a task.
Supplemental Material
Footnotes
Acknowledgments
We thank Daniel Seidel for his valuable support with the robot’s hardware and software.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme GA No. 835284.
Data Availability Statement
The data supporting the findings of this study are owned by the German Aerospace Center (DLR) and are not publicly available.
Supplemental Material
Supplemental material for this article is available online
Notes
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.