
Abstract
The need for fast and accurate analysis of soft robots calls for reduced order models (ROM). Among these, the relative reduction of strain-based ROMs follows the discretization of the strain to capture the configurations of the robot. Based on the geometrically exact variable strain parametrization of the Cosserat rod, we developed a ROM that necessitates a minimal number of degrees of freedom to represent the state of the robot: the Geometric Variable Strain (GVS) model. This model allows the static and dynamic analysis of open-, branched-, or closed-chain soft-rigid hybrid robots, all under the same mathematical framework. This paper presents for the first time the complete GVS modeling framework for a generic hybrid soft-rigid robot. Based on the Magnus expansion of the variable strain field, we developed an efficient recursive algorithm for computing the Lagrangian dynamics of the system. To discretize the soft link, we introduce state- and time-dependent basis, which is the most general form of strain basis. We classify the independent bases into global and local bases. We propose “FEM-like” local strain bases with nodal values as their generalized coordinates. Finally, using four real-world applications, we illustrate the potential of the model developed. We think that the soft robotics community will use the comprehensive framework presented in this work to analyze a wide range of specific robotic systems.
1. Introduction
Soft robots are gradually becoming an integral part of the design spectrum of robotic components. Thanks to their compliant nature, soft robots complement their rigid counterparts for safe interaction with humans or delicate environments. They can achieve complex motion, have better reachability in an otherwise inaccessible or cultured environment, and are less prone to damage from external forces (Laschi et al., 2016; and Trivedi et al., 2008a). Conversely, the same characteristic of compliance and hence infinite degrees of freedom (DoFs) makes modeling soft robots a challenging problem (Armanini et al., 2023). Rigid robots, on the other hand, have well-defined modeling frameworks. Owing to this, they are extensively studied and implemented in factories and our day-to-day lives. To fully unlock the capabilities of soft robots, it is crucial to develop a modeling framework that is both computationally efficient and accurate while also being straightforward to comprehend. With such a tool, the robotic community can quickly analyze and optimize soft robot designs for specific tasks. Hybrid robots, which combine the strengths of both rigid and soft robots, can significantly expand the range of tasks that can be accomplished (Stokes et al., 2014). Hence, the modeling framework of soft components must be compatible with that of rigid parts to take advantage of both.
The general class of soft robots, which cannot be modeled as rods require to use numerical methods based on the full 3D continuum mechanics such as the non-linear finite element method (FEM) (Duriez, 2013). In FEM, the partial differential equations (PDEs) governing the motions of deformable bodies of any shape are approximated by the weak form of the virtual works which, after nodal reduction, provides a set of discrete algebraic equations for statics and ordinary differential equations for dynamics. In detail, the system domain is meshed into “finite elements” over which the position field of
A significant number of soft robots or soft body components can be modeled as slender rods with a high length-to-width aspect ratio. Several examples of soft manipulators (Cianchetti et al., 2014; Trivedi et al., 2008b; Mahl et al., 2014), grippers (Armanini et al., 2021; Hussain et al., 2020; Galloway et al., 2016), and locomotors (Armanini et al., 2022a; Arienti et al., 2013; Umedachi et al., 2016), belong to this group. The most general model to analyze a slender rod is the Cosserat rod model. The Cosserat rod is a 1D continuum mechanics object that can model all possible deformation modes (six modes) of a slender body: axial twist, bend in two directions, axial stretch, and shear in two directions (Cao and Tucker, 2008). The Cosserat rod model can be solved through several numerical methods.
A commonly used approach in continuum robotics is to reformulate the static model of actuated Cosserat rods into a spatial Boundary Value Problem (BVP) that is solved with the shooting algorithm (Rucker and Webster, 2011). Thanks to the use of an implicit time-integration scheme, this approach has been extended to dynamics in Till et al. (2019), but it has recently been shown to be intrinsically unstable when the stiffness of the rod or the simulation time step decreases (Boyer et al., 2022).
In non-linear structural mechanics, J.C. Simo was the first to apply the FEM to the Cosserat model through his Geometrically Exact FEM (GE-FEM) (Simo and Vu-Quoc, 1988). In this context, the challenge consists in extending all the usual linear operations, such as space interpolation, or numerical time-integration, from the vector space
In the DER (Discrete Elastic Rod) approach, rods are modeled as vertices connected by edges according to the concept of discrete differential geometry (Grinspun and Secord, 2006). Based on the Kirchhoff model, the generalized coordinates are the position, the twist angle, and the turning angle at each of the vertices (Bergou et al., 2008). In Gazzola et al. (2018), the DER formulation has been extended to the full Cosserat model, by adding stretch and shear. Devoted to computational graphics and interactive simulation, the DER approach is computationally efficient and easy to implement. Another notable technique is the lumped mass model, which represents soft links as sets of point masses that are connected by springs and dampers, with their apparent material properties tuned by system identification (Jung et al., 2011).
1.1. Strain-based approaches
An alternative method for modeling Cosserat rods involves the parametrization of the distributed strain field along the rod instead of the field of cross-sectional poses as in GE-FEM. The strain-based approach is introduced in both statics and dynamics by Renda et al. (2020) and Boyer et al. (2020), respectively. The approach uses finite strain parameters as generalized coordinates and employs basis functions to span the strain field of a soft body. Additionally, it leverages the exponential map of Lie Algebra to map the screw strain field of the soft body from
The piecewise constant curvature (PCC) model, which is the most commonly used modeling approach in the soft robotics community (Webster and Jones, 2010; Godage et al., 2016, can be seen as a special case of the GVS model. The PCC approximates continuum robots as a finite number of circular arcs. The most popular set of arc parameters constitutes the arc length, curvature, and orientation angle of the arc’s plane. The parametrization can be transformed into elongation strain and orthogonal bending strains to convert the PCC model into a special case of the GVS model. Along with the arc curvature, a variation of the PCC model considers the twist angles as a generalized coordinate of each segment (Rone and Ben-Tzvi, 2014). Other variations of the model include the polynomial curvature (Della Santina and Rus, 2020) and the affine curvature (Stella et al., 2022) models. Under the assumption of a constant strain field along the rod section, the piecewise constant strain (PCS) model, was introduced (Renda et al., 2018) while the piecewise linear strain (PLS) parameterization assumes strain field as a linear interpolation of strains at section boundaries (Li et al., 2023). Under the PCS assumption, an analytical solution exists for mapping the strain field to cross-sectional poses. However, for a general variable strain case of the Cosserat rod, there is no analytical solution to compute the kinematic map. A solution to this involves dividing the domain with variable strain into smaller, discrete subdomains. Within each subdomain, strain is assumed to be locally constant, allowing for the application of the analytical solution for constant strain jumps at the boundaries between subdomains. This solution is employed in Li et al. (2023). All these variations are special cases of variable strain parameterization, although they can benefit from simplified computation with respect to the general case and exploit them in applications.
1.2. Motivations and contributions
When arbitrary strain fields are involved, advanced numerical techniques are required to build the kinematic map. An approximate computation of the Magnus expansion of the strain field in SE(3) is introduced in Renda et al. (2020), which allows fast and accurate recursive computation of cross-sectional pose configurations. Renda et al. (2022) extends this to the recursive computation of geometric Jacobian of a single soft link in a static setting involving the tangent operator of the exponential map. The GVS model in dynamics is solved in Boyer et al. (2020) using a different spatial integration scheme involving backward wrenches propagation instead of the Magnus expansion.
This paper presents, for the first time, the complete modeling framework of GVS for a generic rigid-soft hybrid robot with open, closed, or branched chain structures subjected to external and actuation loads. We describe in detail how the GVS model generalizes the geometric theory of rigid robotics (Park et al., 1995; (Lynch and Park, 2017) to hybrid systems of soft and rigid components, bringing the modeling of the soft bodies and rigid joints under the same framework. Moreover, we developed a novel recursive two-level nested quadrature scheme to compute the dynamic equilibrium. At the first level, the properties of Magnus expansion are utilized to recursively compute kinematic and differential kinematic terms, involving the tangent operator of the exponential map and its time derivative. At the second level, components of the generalized dynamic equations are incrementally updated at each computational point along the robot’s body. The versatility, accuracy, and speed of the GVS model and the new recursive computational scheme were recently demonstrated by the SoRoSim toolbox (Mathew et al., 2022a). However, only the final form of the generalized dynamics was given, omitting the details of the proposed computational algorithm.
Previous works based on the GVS model focus on single-link soft robots and use monomial (Renda et al., 2022; (Armanini et al., 2022b) and Legendre polynomial (Boyer et al., 2020) strain bases, where the basis is defined over the entire rod domain. Such models are classified under relative modal reduction: the strain field is a linear function of generalized coordinates, which influence the shape over the entire domain of the soft body. In scenarios such as contact events and local actuation, the deformation tends to be localized and is best captured by basis functions whose generalized coordinates affect the strain field locally. For such cases, we introduce the local bases with nodal values as their generalized coordinates (relative nodal reduction). The local basis presents an additional advantage: its generalized coordinates can be highly intuitive. For instance, in the FEM-like local basis introduced in this paper, the generalized coordinates correspond to the local strain experienced at specific nodes on the soft body. We note that PLS parameterization in Li et al. (2023) is similar to the linear FEM-like basis presented in this paper, although restricted to linear node interpolation, while the PCS model can be considered as an FEM-like basis of order 0.
Furthermore, this paper presents a novel approach that extends the scope of strain parametrization by introducing non-linear state- and time-dependent strain bases. The novelty of this approach lies in the introduction of strain fields that change non-linearly with respect to generalized coordinates and time, potentially leading to further model order reductions. This is particularly advantageous in cases where there is prior knowledge regarding the form of the strain field or the location of internal actuation or external forces. The non-linear and time-dependent bases presented can leverage this information to deliver accurate modeling with less DoFs. Using four real-world applications, we emphasize the potential of the developed model, algorithm, and strain parametrization. To summarize, the main contributions of this work are: (1) The complete GVS model for the static and dynamic analysis of a generic open-, branched-, or closed-chain, soft-rigid hybrid robots with multidimensional rigid joints. (2) Recursive algorithm for computing the Lagrangian dynamics. (3) Introduction of local strain bases with nodal values as their generalized coordinates. (4) Introduction of non-linear state- and time-dependent strain bases for order reduction.
The rest of the paper is organized as follows. Section 2 summarizes the GVS model and presents the new recursive computational scheme. Section 3 discusses the classification of state-independent bases and introduces the concept of local bases. Using two examples, we explain the order reduction capability of non-linear state- and time-dependent bases in Section 4. Section 5 shows the real-world applications of the GVS method using four examples. Finally, we provide our concluding remarks in Section 6.
2. Mathematical modeling and computation
A generic open-, branched-, or closed-chain hybrid linkage is considered for the modeling (Figure 1). Mathematical modeling involves the computation of pose, velocities, and accelerations at every point of the kinematic chain. To introduce generalized coordinates into the model, we parametrize the continuous strain field. Using this, we calculate the geometric Jacobian and the generalized dynamics of the system. We propose an explicit approach based on a recursive computation of the forward kinematics, velocities, and acceleration. Schematics of the proposed kinematics for a floating hybrid soft/rigid chain. Here, link i is a soft link, and link j is a rigid link. 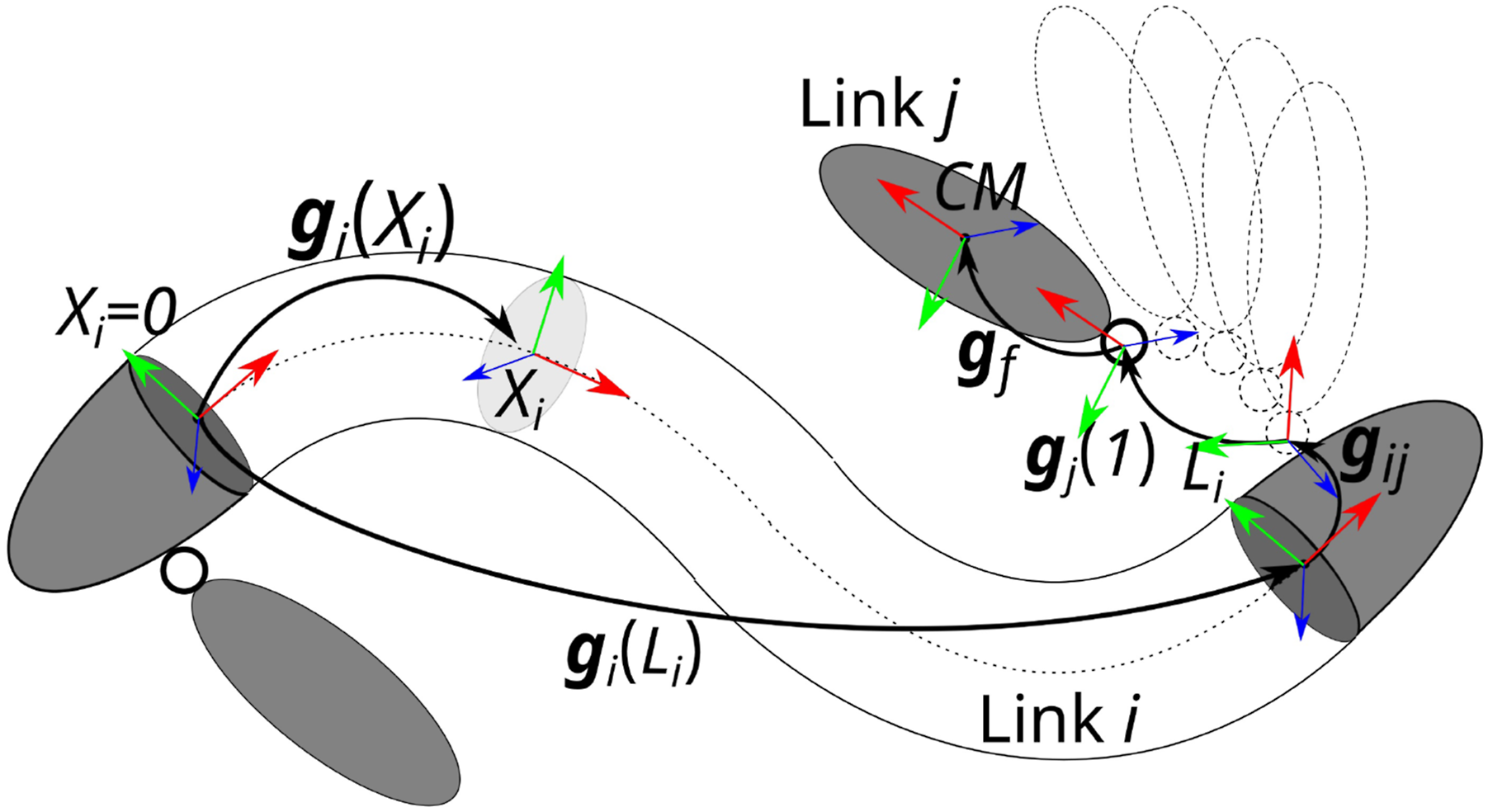
2.1. Recursive kinematics
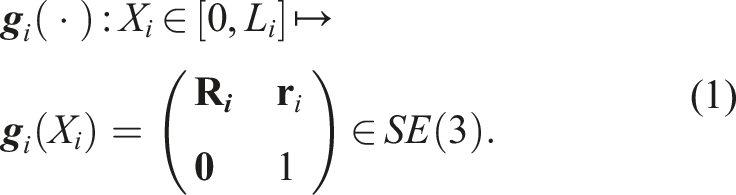
A floating hybrid kinematic chain is composed of interconnected rigid and soft bodies, here represented by Cosserat rods. The configuration of a soft body i (respectively, a rigid body) with respect to the body frame at its base is defined as a curve:
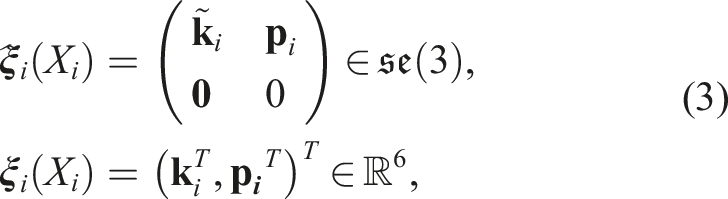
To study the exponential representation of (1), we introduce its partial derivatives with respect to X
i
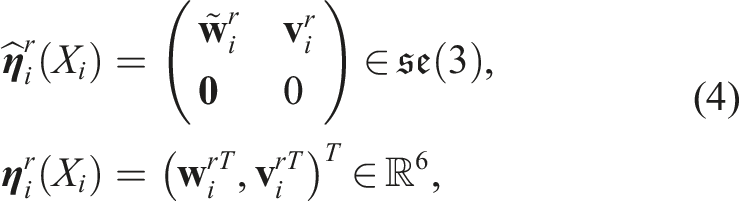
(indicated by (⋅)′) and time (indicated by


The forward kinematics of a body (
Now, the first of the equations in (2a) is a matrix differential equation that can be integrated in space. For the rigid link case,

The exponential map in SE(3) Selig (2007) is provided in Appendix A. For the soft link with constant strain (

Magnus expansion is an integral series of Lie Brackets of
Like any finite series, the Magnus expansion will degrade for larger values of X
i
. Hence, the soft link shall be divided into smaller intervals of lengths h
j
and Equivalence of soft links and rigid joints, by the virtue of Magnus expansion: (a) Shows the recursive progression from X
i
to X
i
+ h for a soft link. (b) Shows the equivalent fictitious progression from X
i
= 0 to X
i
= 1 for a rigid joint (a prismatic joint used here).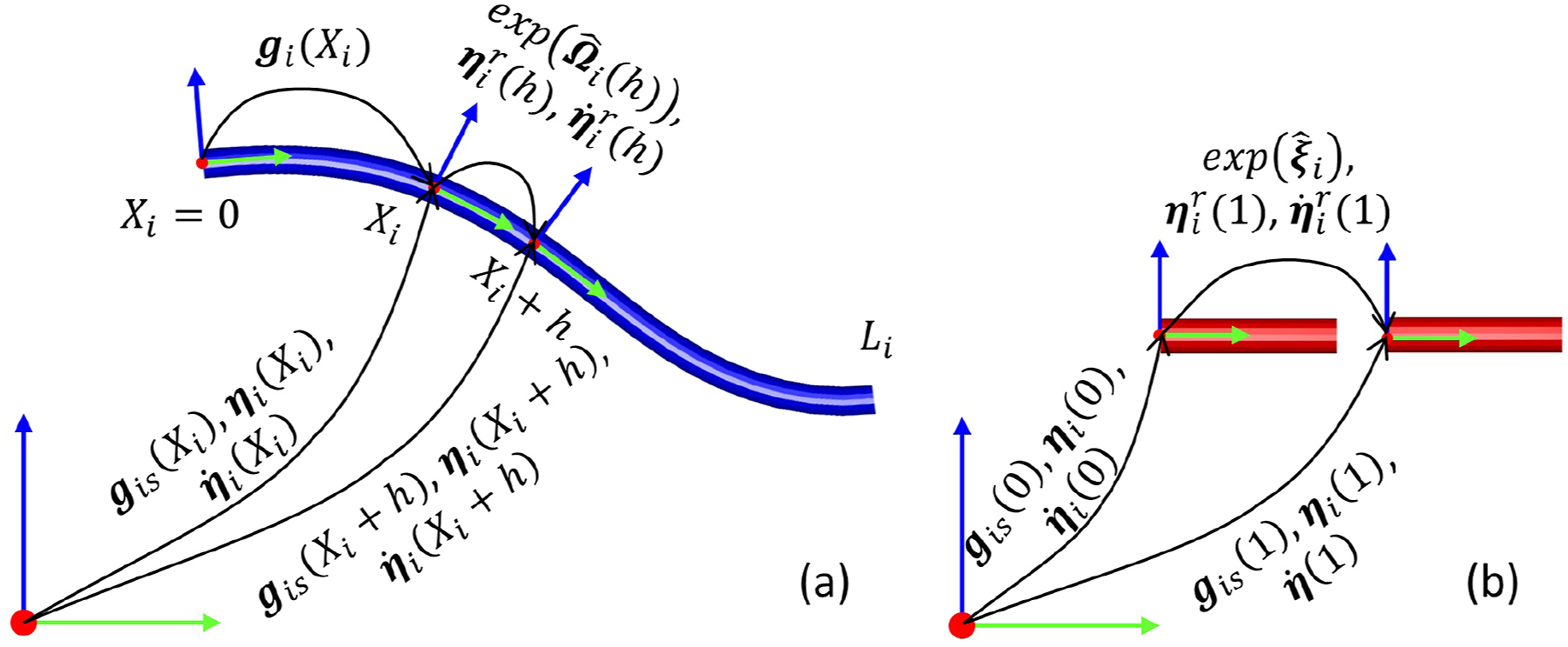



Next, we seek to find a relation between the time derivative of the strain twists and the links velocity and acceleration twist. Considering the equality of the mixed partial derivative of







Again, for a soft link, there is no explicit solution for the integration. Using the approximated Magnus expansion of


Note that here




Equations (8), (18), and (19) highlight the similarity of formulations of soft bodies and rigid joints. Finally, to pass from link “i” to “j,” which is rigidly connected to “i” with a fixed transformation matrix



2.2. Strain parametrization
It is time now to discretize the system configuration (the strain) and introduce the generalized coordinates and basis functions. To this end, the continuous strain fields


In this case,
The first and second time-derivatives of strain from equation (21) are given by


For independent bases (which are not functions of


As mentioned earlier, the recursive computation of kinematics (

The recursive formula for

Similarly from equation (2.1), we can derive the absolute acceleration twist for dependent bases:



For independent bases, the acceleration twist do not have

The recursive formulas for
2.3. Dynamics and statics
Once the Jacobian is found, the generalized dynamics of the floating hybrid chain can be obtained by projecting the free dynamics of each link by virtue of D’Alembert’s principle (Renda and Seneviratne, 2018). Note that the virtual displacement varies only with respect to

For a soft link, the free-body dynamic equation in the local frame and its boundary conditions are given by the Cosserat equilibrium (Boyer and Renda (2017)): Schematics of the dynamics of a soft link internally actuated.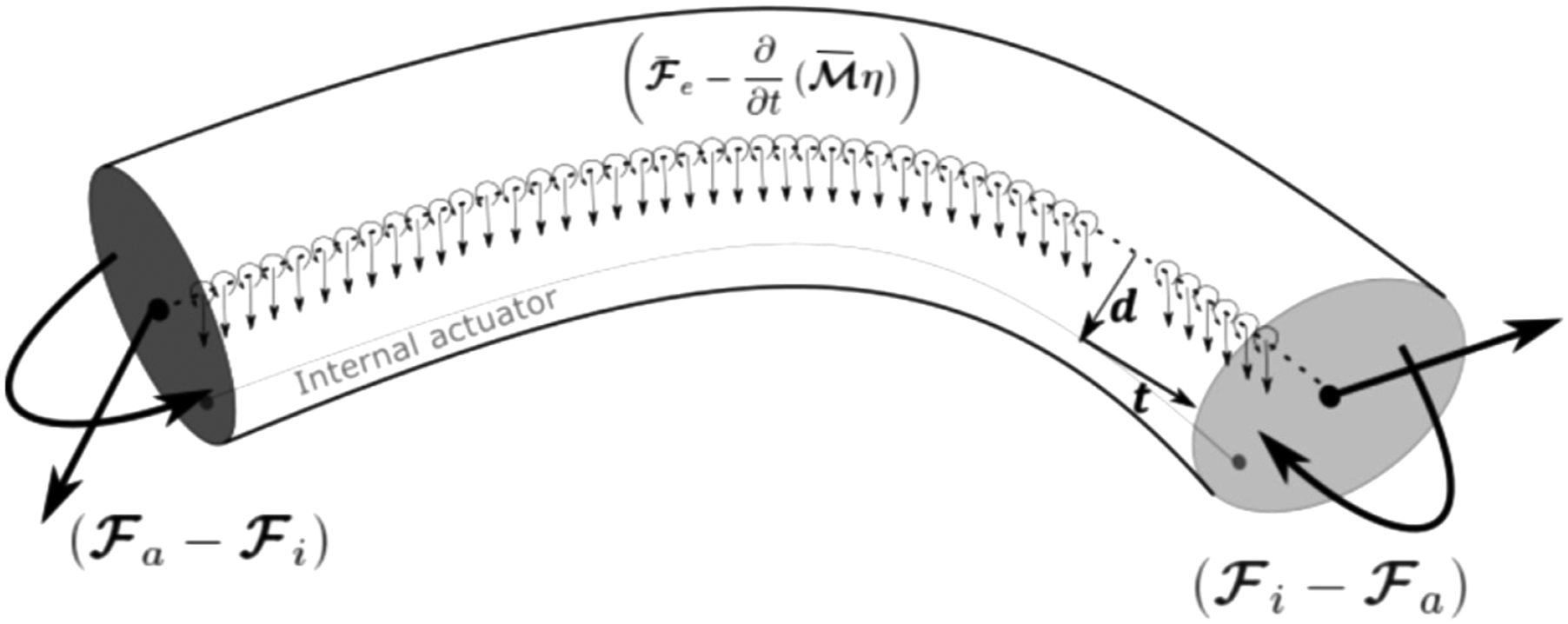
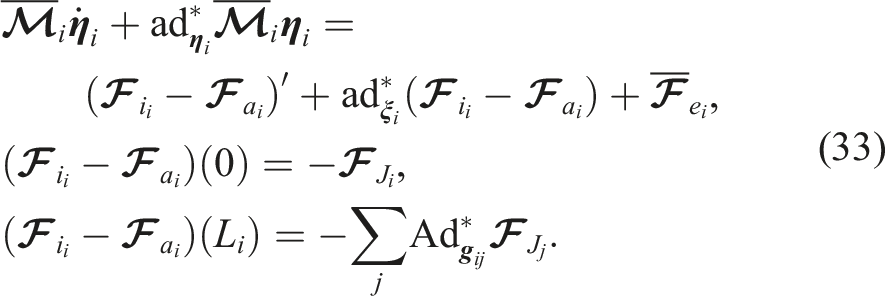
For what concerns the internal elastic wrench,
1
one can take the derivative of any elastic energy potential that better describes the rod elasticity. Without loss of generality, for a Hook-like linear elastic law we get
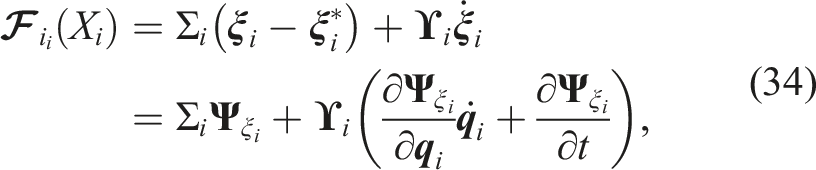
With regards to the actuation, in general,

It is now possible to obtain the generalized dynamic equation of the system via D’Alembert’s principle. We consider two cases, 1: with at least one dependent base and 2: where all bases are independent of
2.3.1. Case 1. Dependent bases
Substituting equations (27) and (29) into (32) and (33) projecting them onto the space of generalized coordinates through the Jacobians









For more information on the mathematical procedure, we refer the reader to Renda et al. (2018), Renda and Seneviratne (2018), and Renda et al. (2020). For closed-chain systems, one may follow the approach recently presented in Armanini et al. (2021) to include the closed-loop constraints. The process involves the introduction of constrain forces into the generalized dynamics and the additional constrain equations expressed in the Pfaffian form (velocity level). For statics, the constraints are expressed in the position level.
2.3.2. Case 2. Independent bases
Similarly, using equations (28) and (31), we get the generalized dynamics and static equilibrium equations of a robot, which is modeled using independent bases:




Note that
2.4. Computation
The dynamic analysis involves the temporal evolution of the system states,
The spatial integrals in equation (37) or (40) can be evaluated using any numerical integration schemes like Gaussian-Legendre quadrature, which numerically evaluates the integrands at discrete points. This numerical integration method can be expressed as

where n
i
is the number of integration points, w
k
are the quadrature weights, and X
k
are the integration points (both scaled according to the integral limits). For instance, the roots of the n
th
order Legendre polynomial are used as the integration points for the Gauss quadrature method. Thus, a two-level nested quadrature scheme is used to get the generalized equations: Zannah collocation to evaluate the approximate Magnus expansion of the strain twist and the numerical scheme for the integration of (37) or (40). This resembles the orthogonal collocation method of Orekhov and Simaan Orekhov and Simaan (2020). Figure 4 provides a graphical representation of the numerical scheme for a single soft link with a three-point Gauss quadrature scheme as an example. Graphical representation of the two-level nested quadrature scheme for a soft link i. In this particular example, a three points Gauss quadrature (fourth-order) scheme is used for the integration, and a 2 point Zanna’s collocation method (fourth-order) is used for calculating the Magnus expansion.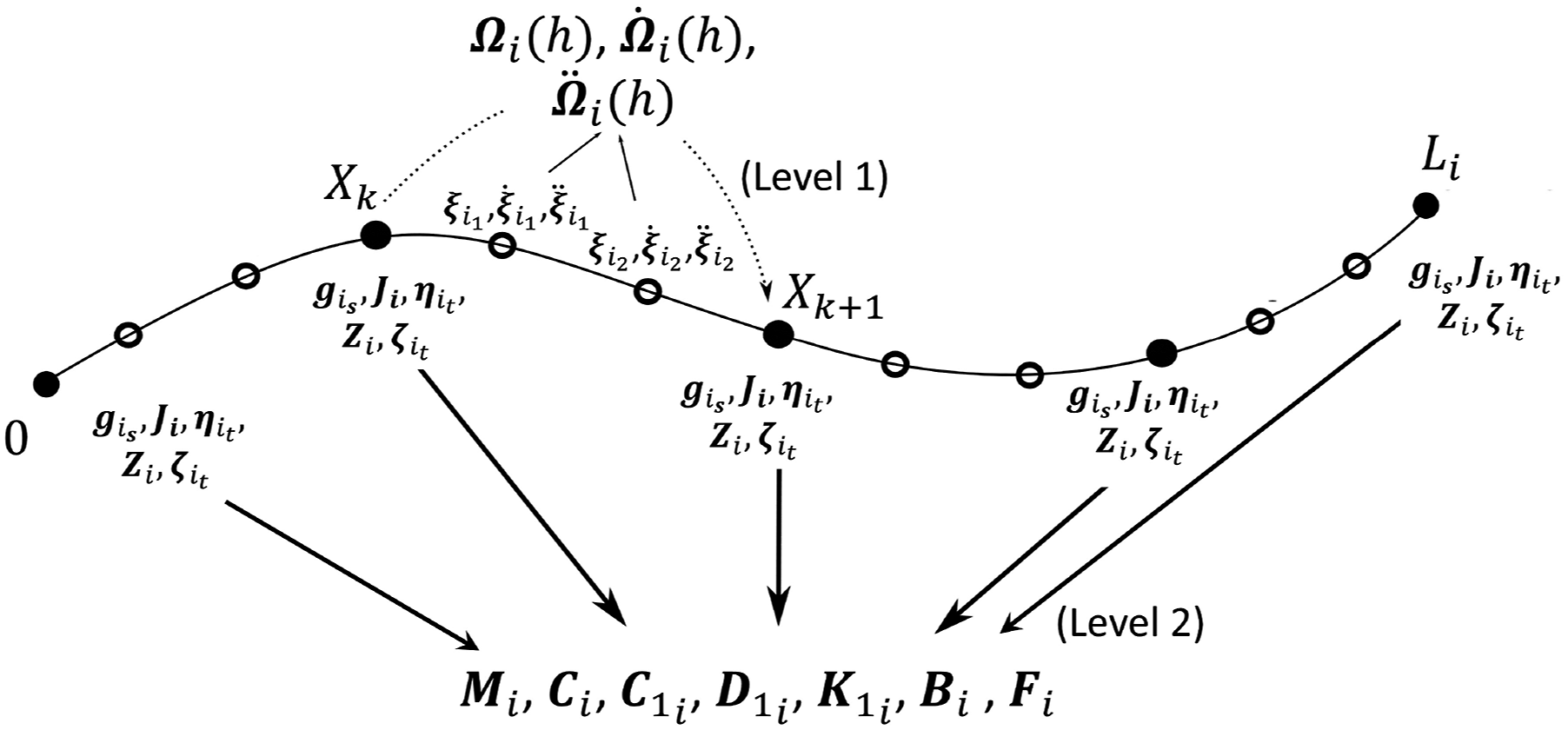
The Gauss quadrature integration scheme with n G points gives an exact solution for the integration of a polynomial of order up to 2n G − 1. For basis functions that cannot be approximated as polynomials, one should use a different integration scheme (e.g., trapezoidal quadrature, Simpson’s rule) that is compatible with the basis. The type of basis, the complexity of geometry, material models, external force, and actuation models must be considered while choosing the integration scheme and the number of points. In the following sections, the reader can find details of the integration scheme used for different bases.
For the computation of soft links, we propose a normalization scheme. We scale the domain of the i th link from [0, L i ] m to [0, 1] units. Subsequently, all physical quantities of the link with length dimensions are converted into a new unit of length given by: L i m = 1 unit. We perform all computations of the link using this new unit of length. This means the generalized coordinates of a soft link are expressed in the link’s unit of length. Finally, the projected free dynamics of the link is scaled back to m for computing the components of generalized dynamics or statics equation. Normalization has the following advantages: (i) All basis can be expressed as a function of X = X i /L i , the numerical value of the scaled curvilinear abscissa. (ii) All spatial integrations can be performed from 0 to 1 irrespective of the length of the soft link. (iii) All matrices (for instance, the generalized stiffness matrix) are scaled appropriately for a soft robot with multiple soft links. Properly scaled matrices are preferred for the speed and stability of numerical computations.
The computation for the dynamic analysis of the hybrid linkage can be simplified into the following steps: Step 1: Computation of the system’s state and their derivatives ( Step 2: Initialization of components of generalized dynamics equation: Step 3: Recursive computation of Step 4: Incremental update of components of generalized dynamics equation at each computational point (center of mass of rigid links and space integration quadrature points for the soft links). where, Step 5: Solve for



Steps 3 and 4 are repeated for all links. Note that for soft links, the computational point refers to their integration points, while for rigid links, typically, the center of mass is considered. As previously mentioned, closed-chain systems have additional constraint equations. We employ an explicit numerical integration scheme (like ode45 or ode15s of MATLAB) to propagate the computed value of
3. Independent bases
Let us start our analysis with bases that are independent of
Independent base is an 6 × n
i
matrix function of X ∈ [0, 1], whose columns are linearly independent vector functions. The k
th
column is typically defined as

The function f k can span the entire domain of X or a smaller subdomain. The former type is classified as global shape functions, while the latter is called local shape functions. This section explores the properties of global and local strain bases, which are constructed using global and local shape functions. We also present three examples to highlight their applications.
3.1. Global bases
Global bases are constructed using global shape functions, which span the entire domain of an i
th
link, the value of strain at a given point depends on all elements of Global basis functions which span the domain: (a) Monomial and (b) Legendre polynomial bases.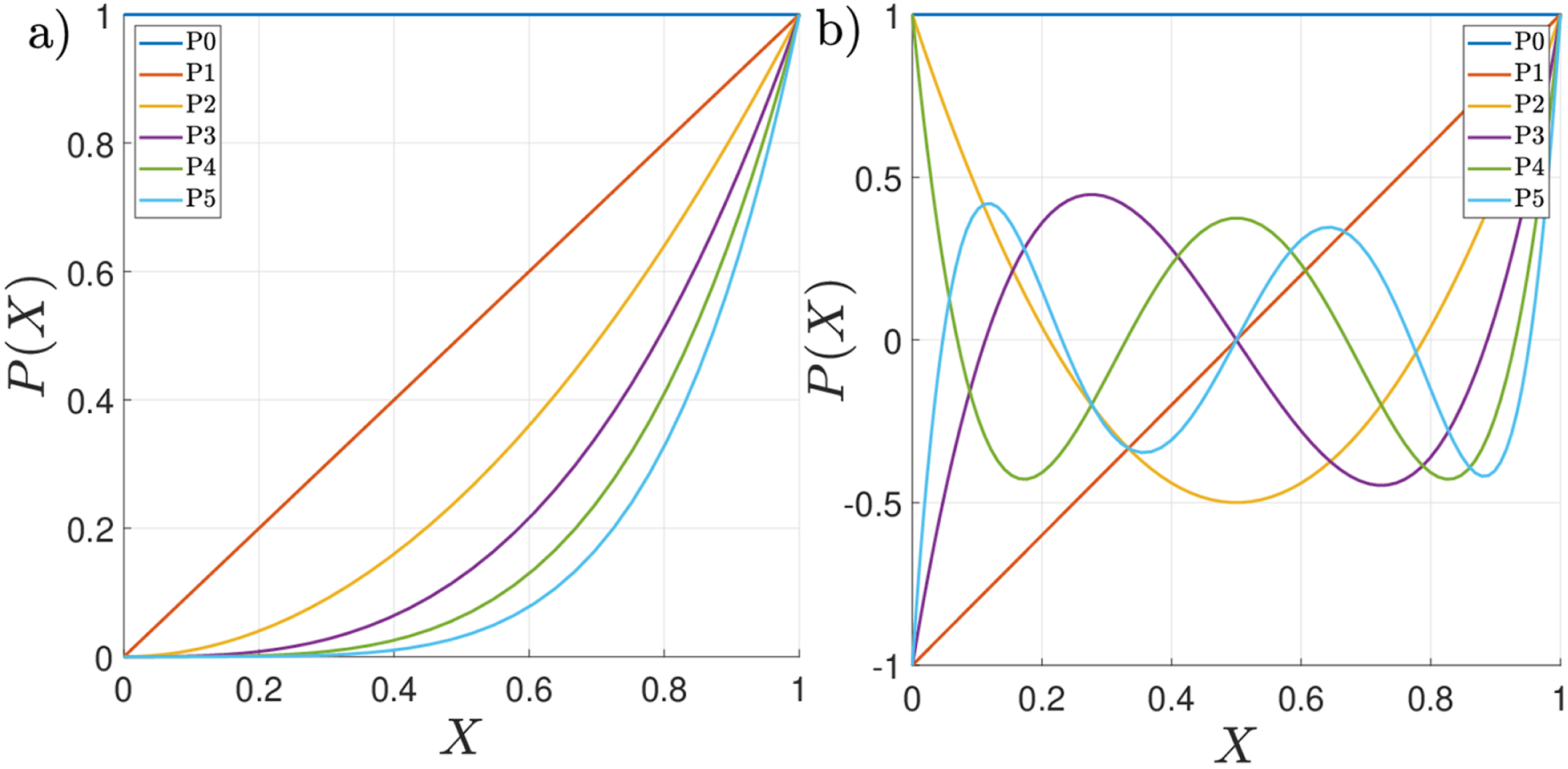
In this case,
Since monomials and Legendre polynomials are polynomial functions, in most cases, we can use a Gauss quadrature integration scheme of an appropriate number of integration points (n G ) to compute the coefficients of generalized dynamics and static equilibrium equation (39), according to equation (41). The higher the value of n G , the better the accuracy of the integral. However, the computational costs will be higher too. If the integrands in equation (37) (their independent equivalents) or (40) require a very high order polynomial to approximate, it is better to use an alternate quadrature scheme for their integration.
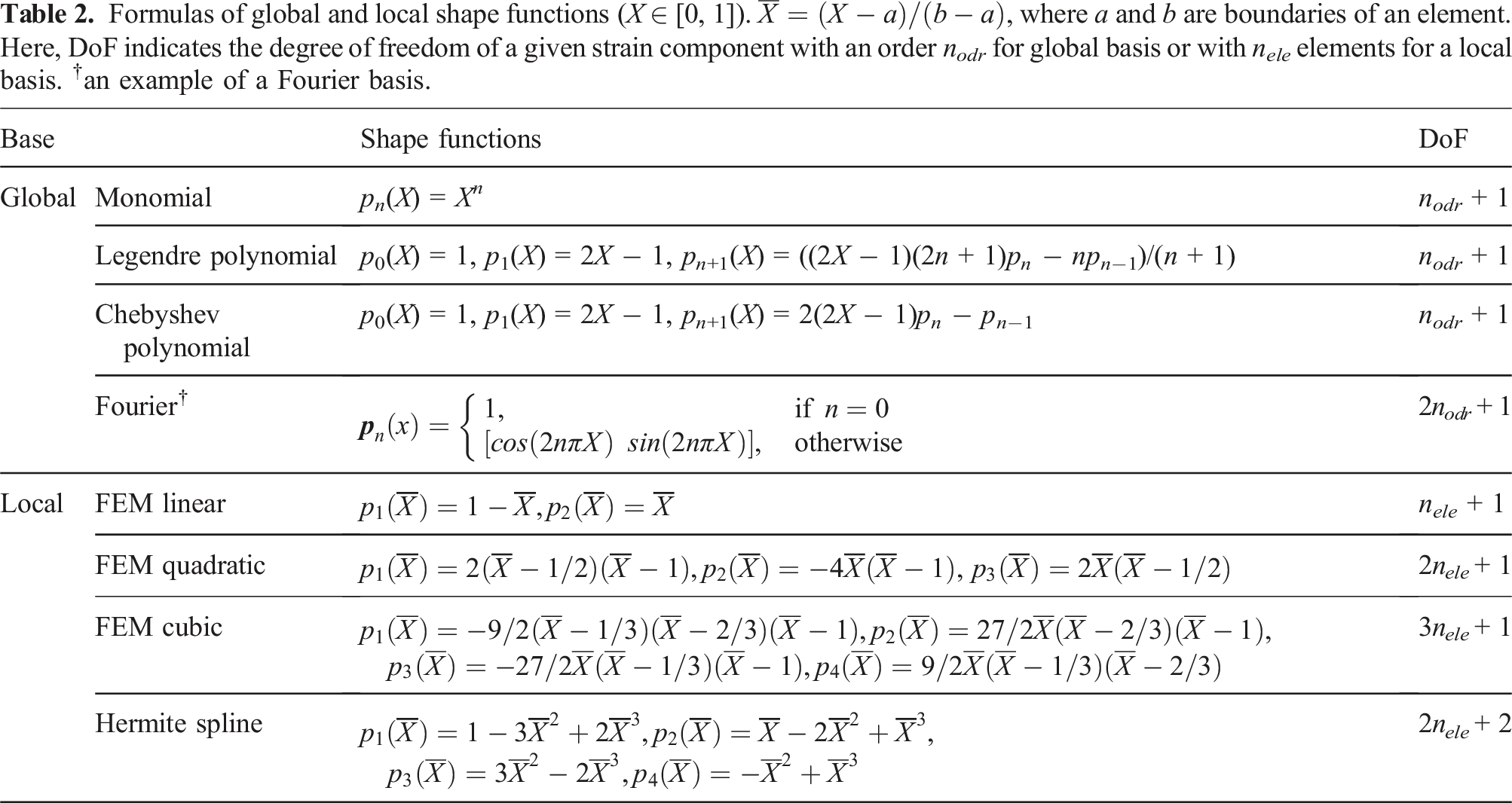
Various global bases based on different basis functions, such as Chebyshev’s polynomials and Fourier series, can be implemented according to the problem specifications. For instance, the Fourier basis is ideal to approximate strains that are periodic in X i . Table 2 provides more details on these.
3.2. Local bases
A soft link may be subjected to local loads such as contact, point force, or boundary loads, which can introduce localized deformations. Local bases, where the generalized coordinates affect only a subdomain X i , can be employed in such cases. Local bases are constructed using local shape functions.
We employed FEM-like bases, which divide a soft link into elements. While traditional FEM shape functions are used to describe the position field, we use them to model the strain field. The shape function can be linear, quadratic, or cubic, with 2, 3, and 4 nodes, respectively. Finally, at the shared point between two elements, we have a common node, which ensures strain continuity. Figure 6(a)–(c) describe the shape functions on a three-element soft link. The value of generalized coordinates corresponds to the value of strains at every node. Hence, they have an explicit physical meaning. Note that this particular type of strain parameterization makes it relative nodal reduction. Depending on the problem specifications, one can allow particular modes of strain out of the six possible modes. For FEM-like bases to model different degrees of freedom for different strain modes, we must create corresponding element grids for each mode with a different DoF. Also, the minimum DoF per strain mode is two, three, and four for linear, quadratic, and cubic types. It is worth noting that, for FEM bases, the generalized stiffness and damping matrices are band matrices (tri-, penta-, and hepta-diagonal for linear, quadratic, and cubic types) which is computationally preferable. Shape functions for a three-element soft link. Local bases: (a) Linear, (b) Quadratic, (c) Cubic FEM, and (d) Hermite spline bases. Each color corresponds to a strain mode that is governed by a single coordinate. The vertical dashed lines indicate the boundaries of each element, while the black dots indicate the location of the nodes, where the generalized coordinates are defined.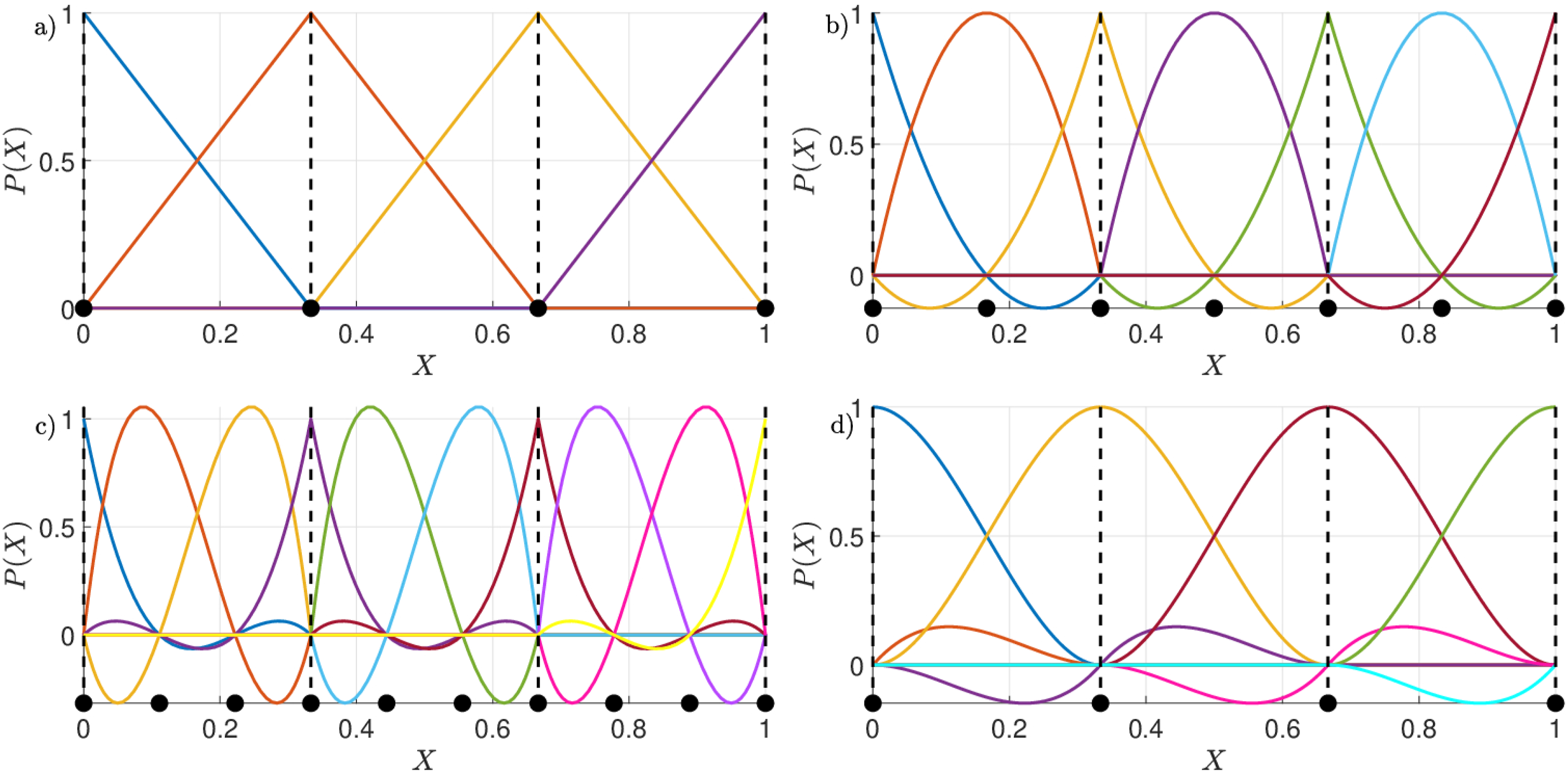
Since the shape functions are not polynomials that span the entire rod domain, we cannot use the Gauss quadrature scheme for the integration. We use elementwise integration—that is, we use a Gauss quadrature scheme on each element with their weights tuned according to the element’s length. A linear element requires at least two quadrature points for integration, while a quadratic or cubic element requires 3 and 4 points, respectively.
Parameters of the cylindrical beam under study.
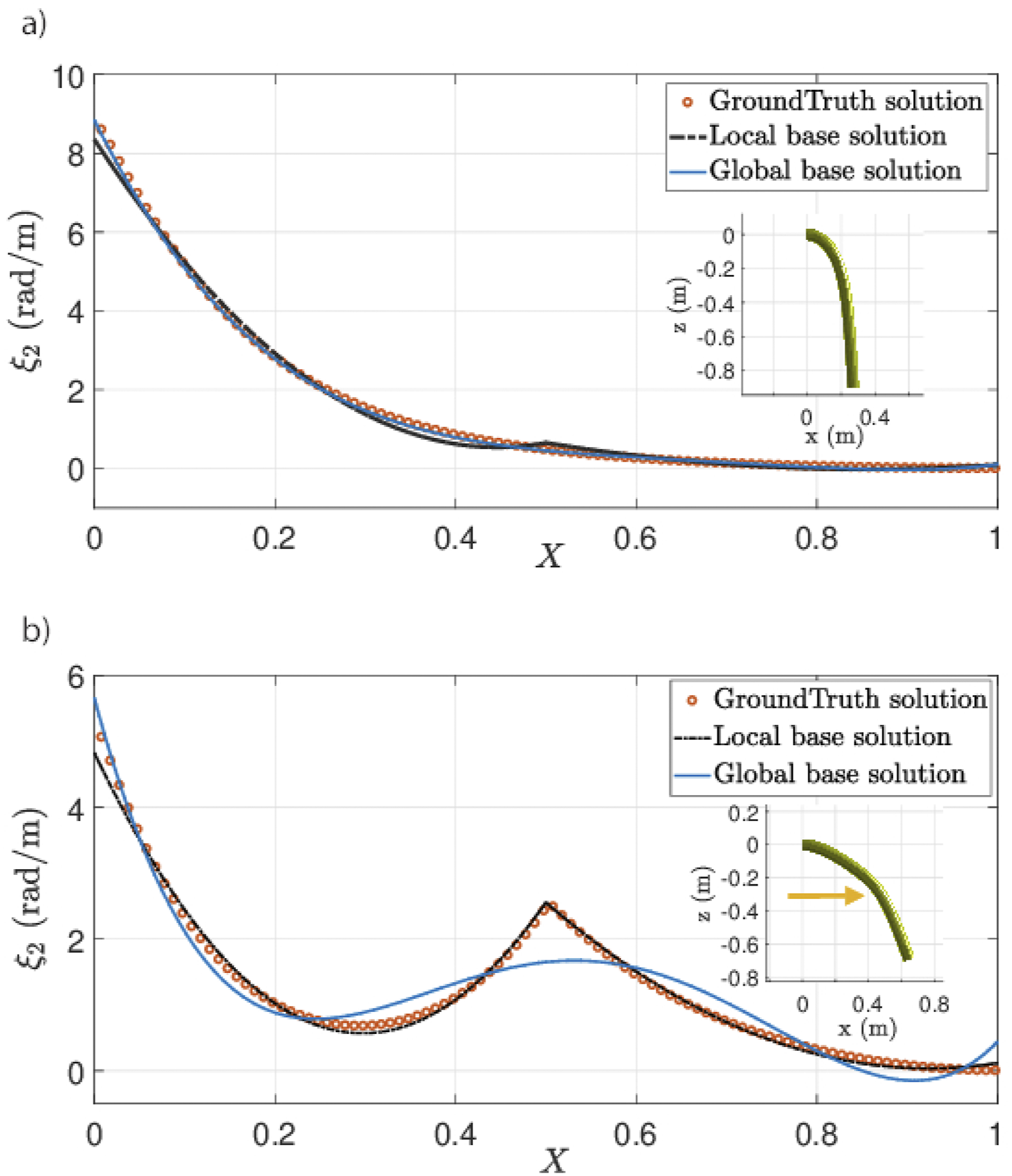
(a) Strain fields for the static equilibrium of a slender cylindrical beam under gravity using global and local bases. (b) Solution when applying a point force at X = 0.5.
We introduce an additional scenario to illustrate how global and local bases respond to perturbation. We solve the static equilibrium for an internally actuated arm using two different formulations: the first employs a fourth-order Legendre polynomial to characterize the bending strain, and the second utilizes a two-element quadratic FEM basis. Both approaches yield a system with five DoFs. We perturb the second coordinate of both static equilibrium solutions with a predefined percentage of perturbation. The impact of this perturbation is depicted in Figure 8. The global basis solution exhibits a substantial difference in the strain field and configuration due to the perturbation, illustrating the sensitivity of the solution. Conversely, the local basis displays a localized discrepancy in the strain field, and consequently a lower discrepancy in the configuration. These findings indicate that while global bases can efficiently capture complex fields with fewer DoFs, their susceptibility to perturbations could significantly alter the solution outcome. A complete sensitivity analysis requires an analytical derivative of the dynamic model, whih is beyond the scope of this paper. However, with some additional effort, it can be adapted from the rigid robotics literature (Sohl and Bobrow, 2001). Strain fields and configurations of the static equilibrium solutions in comparison to the perturbed ones for (a) global basis and (b) local basis.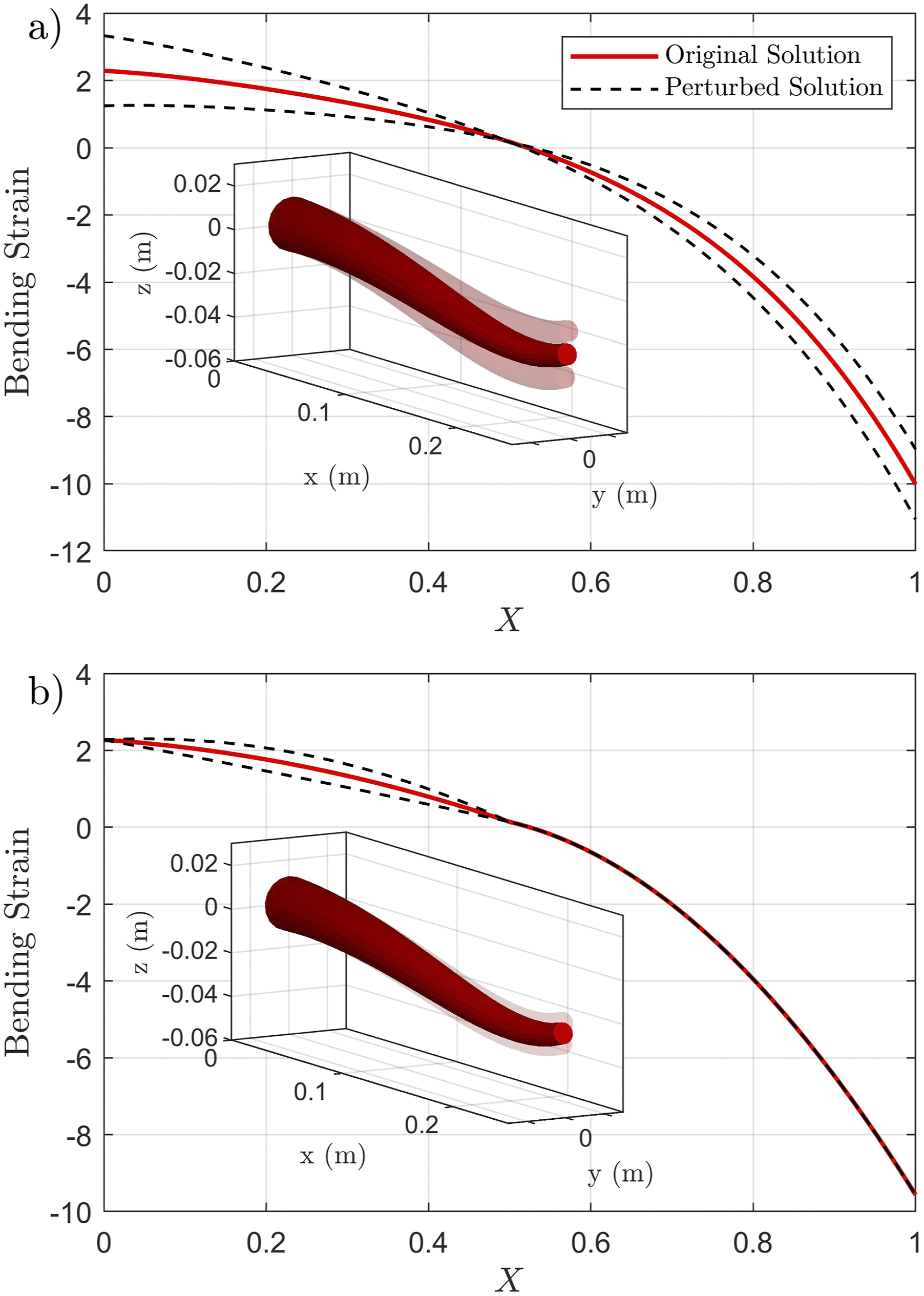
Formulas of global and local shape functions (X ∈ [0, 1]).
4. Dependent bases
Independent bases can model strains which are non-linear functions of X. However, they are linear with respect to
This section introduces dependent bases and explores their order reduction capabilities using two illustrative examples: (1) dependent bases that are functions of
4.1. Basis dependent on q and t
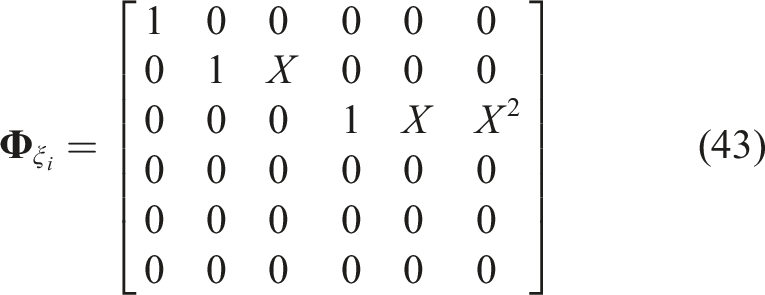
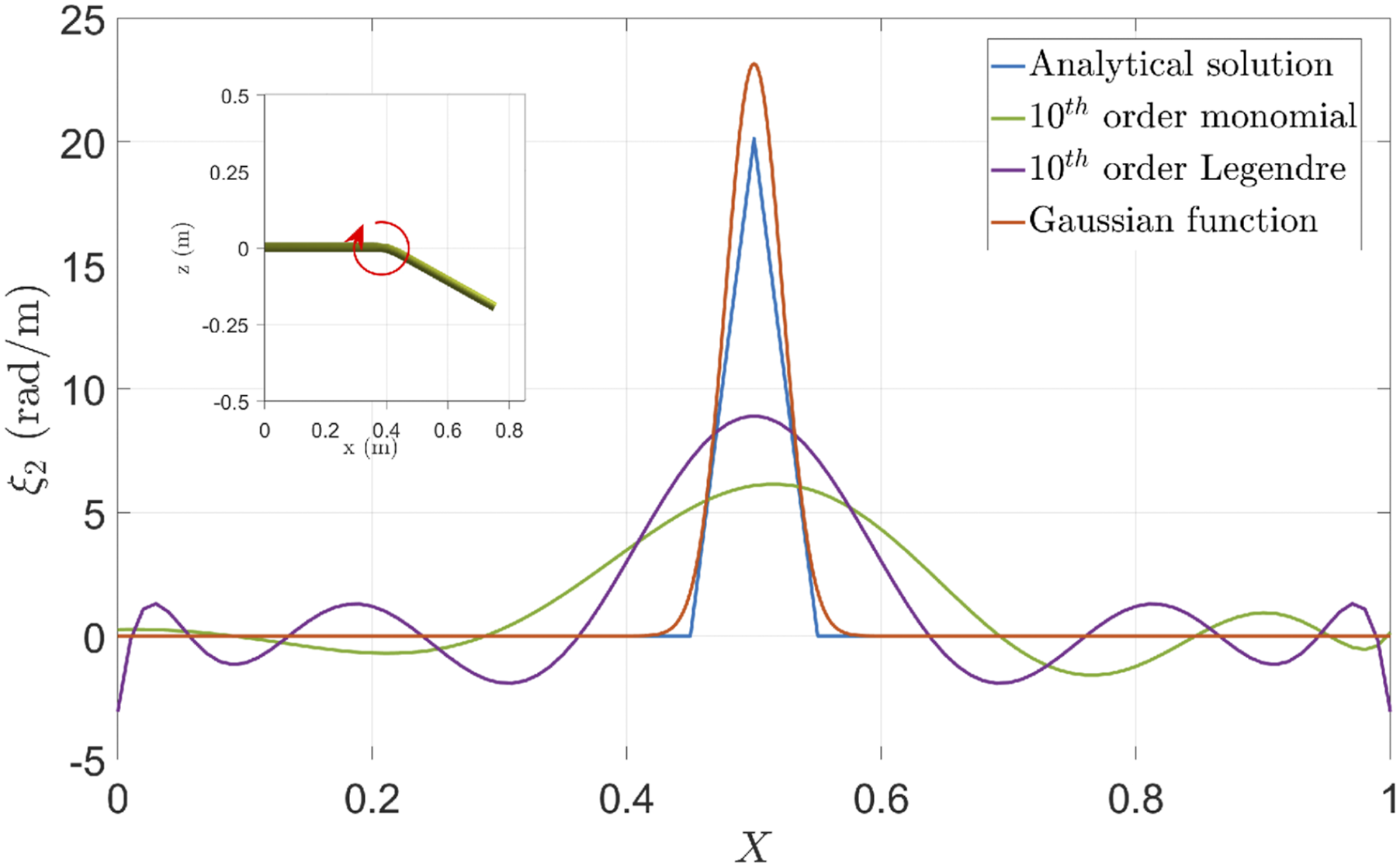
We simulate the case where an internal actuation force, Comparison of static equilibrium solutions when the internal moment M2(X) is applied at the midpoint of the beam. The deformed shape of the body, corresponding to the analytical solution, is shown in the inset.
We now proceed with the dynamic simulation. The internal actuation moment is applied at X = (t/t f ) with a constant peak magnitude of 0.5Nm (Figure 11(a)). The value of t f is chosen as 2 s. Figure 11(a) and (b) show the dynamic strain distribution and the deformed shape of the beam. The dynamic simulation does not capture the transient response (strains) that lie outside of the finite function space of the proposed Gaussian basis function. To underscore this fact, we employed a Cubic FEM basis with 10 elements and compared the solution with that of the dependent basis. Noticeable differences exist in the solutions, especially in the part outside the Gaussian basis function. To enhance the representation of the system dynamics, additional basis functions could be integrated with the Gaussian basis. A detailed discussion of such a scenario is presented in Section 5.4. To gain a more comprehensive understanding of dynamic simulations presented in this article, we recommend the reader refer to the supplementary video. The simulation with dependent bases took 3 min and 10 s to complete using the ode15s integrator of MATLAB. The specifications of the PC which we used for the computations in this paper are as follows: Intel(R) Core(TM) i7-1065G7 CPU @ 1.30 GHz 1.50 GHz, 16.0 GB RAM. The MATLAB version we used for these analyses is R2020a.
4.2. Basis dependent on q
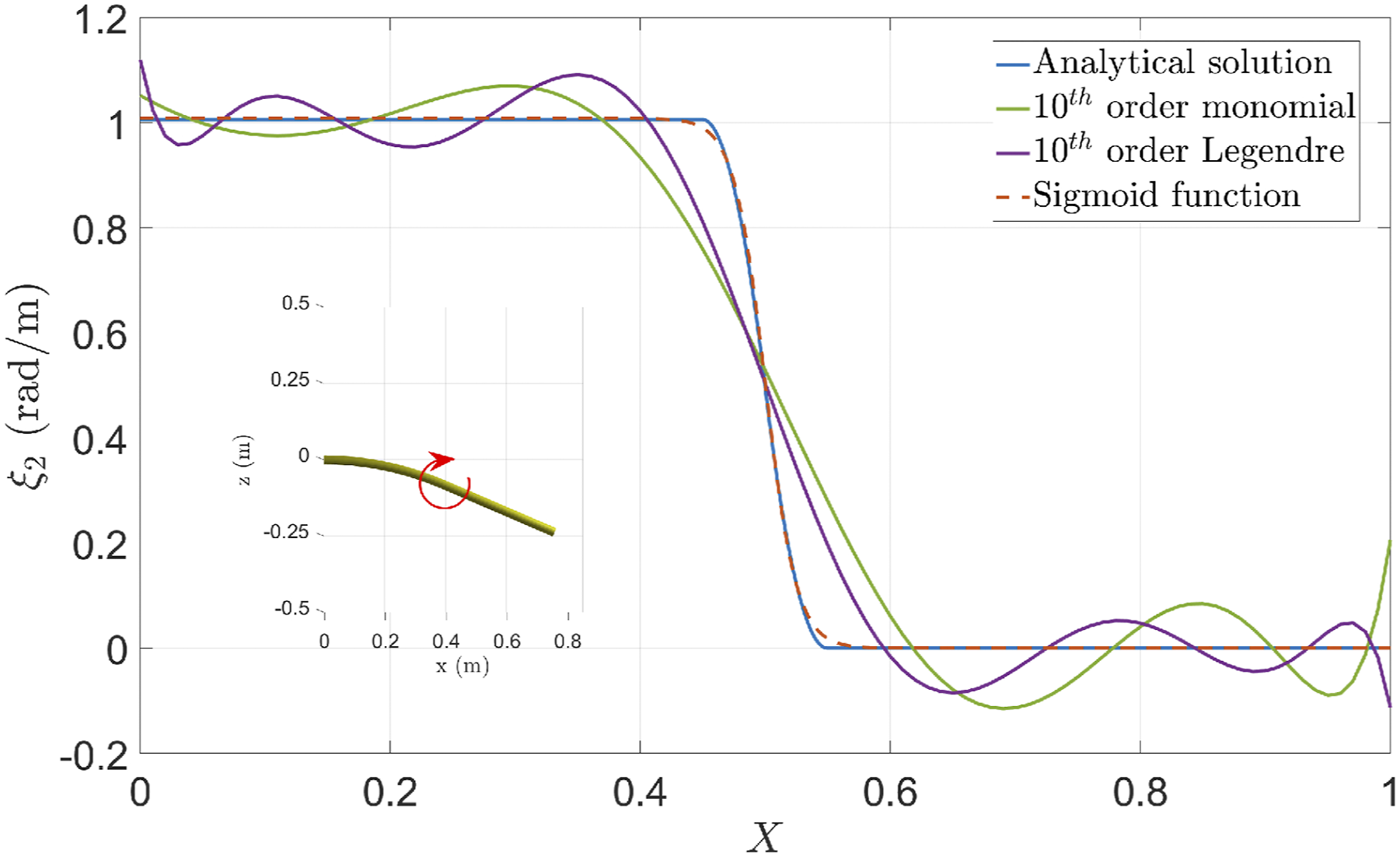
In our second example, we simulate the case where an external moment Comparison of static equilibrium solutions when the external moment M2(X) is applied at the midpoint of the beam. The deformed shape of the body, corresponding to the analytical solution, is shown as an inset.
For the dynamics simulation, we linearly (in time) varied the location of the external moment from L/4 to 3 L/4. The magnitude of Dynamic analysis using dependent bases: (a) Internal actuation moments and their corresponding dynamic strain distribution that is modeled using a time-dependent Gaussian basis function (solid line) and using FEM Cubic basis function (dashed line). (b) Superimposed snapshots of corresponding deformed shapes (dependent base). (c) External moments and their corresponding dynamic strain distributions that are modeled as Sigmoid functions. (d) Superimposed snapshots of corresponding deformed shapes.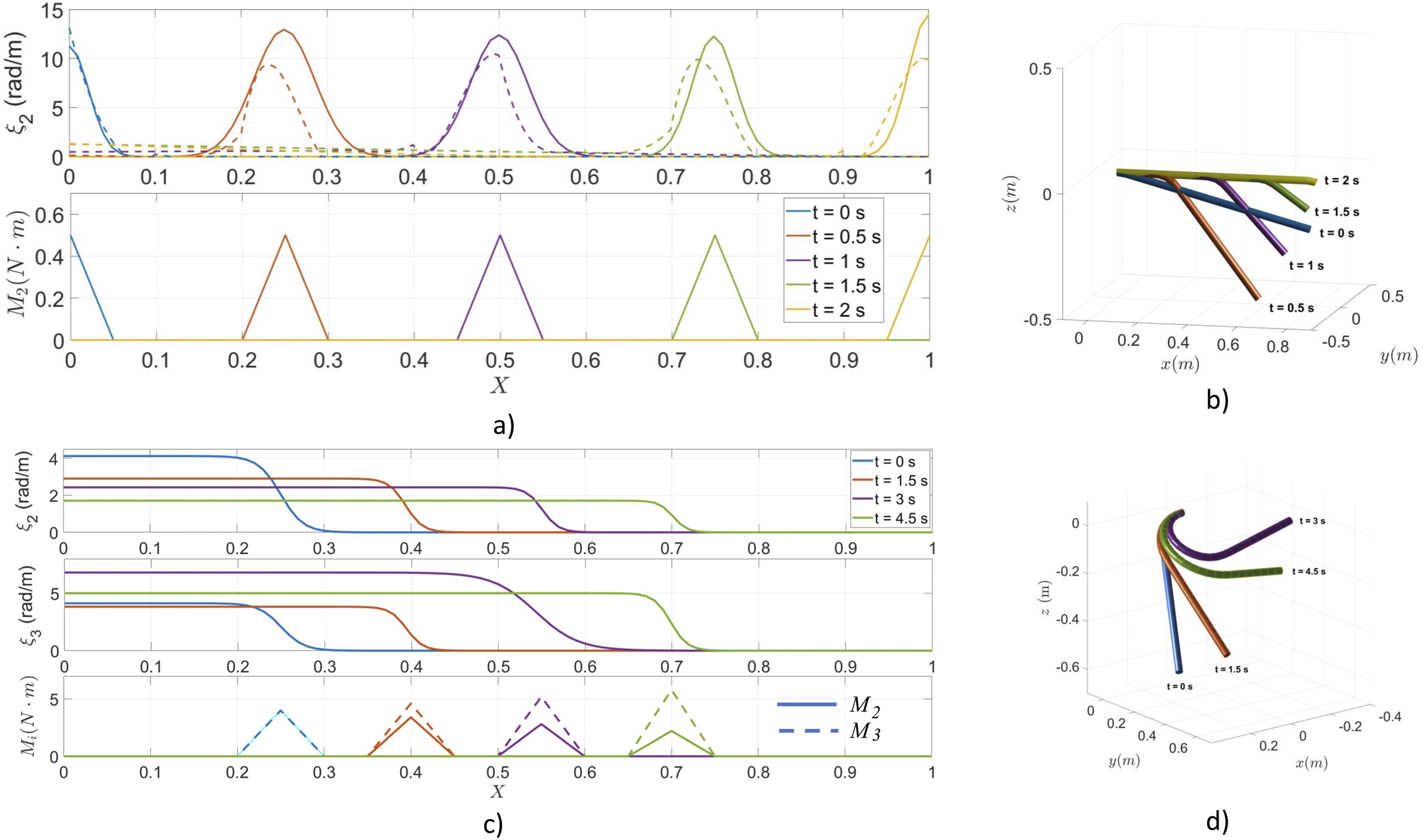
5. Applications
In this section, we explore the applications of the GVS model and the bases introduced in the previous sections. We consider four real-world scenarios for dynamic analysis. The first three scenarios focus on independent bases, while the last one combines both dependent and independent bases. The readers may refer to the supplementary video for the dynamic simulation results presented in this section.
5.1. Dynamics of a cable-driven soft manipulator
Tendon or cable-driven actuation is one of the most common actuation methods used in soft robotics. Pulling the cables that are embedded in the soft robot allows the introduction of actuation forces and moments that deform the robot. By tuning the actuator paths, the manipulators can achieve complex deformed shapes (Renda et al., 2020). Here we showcase a soft manipulator with four independent actuators as shown in Figure 12(a). We define the manipulator as a 30 cm cylindrical beam of 3 cm diameter, with a Young’s modulus of 1 MPa, a density of 1000 kg/m3 and a material damping coefficient of 104 Pa.s. We subject the manipulator to gravitational load in the negative global Z direction. To define the actuator paths, we divide the manipulator into two sections of 15 cm each. The local y and z coordinates of the actuators are detailed in Table 3. The basis for the actuation is calculated using equation (35), using the actuators’ coordinates that are detailed in the Table. (a) Initial configuration and actuator paths, (b) Actuation profile for each of the four actuators, and (c) Snapshots of the cable-driven manipulator at different times. The red dots represent the trace of the manipulator’s tip. Cable coordinates for the cable-driven manipulator.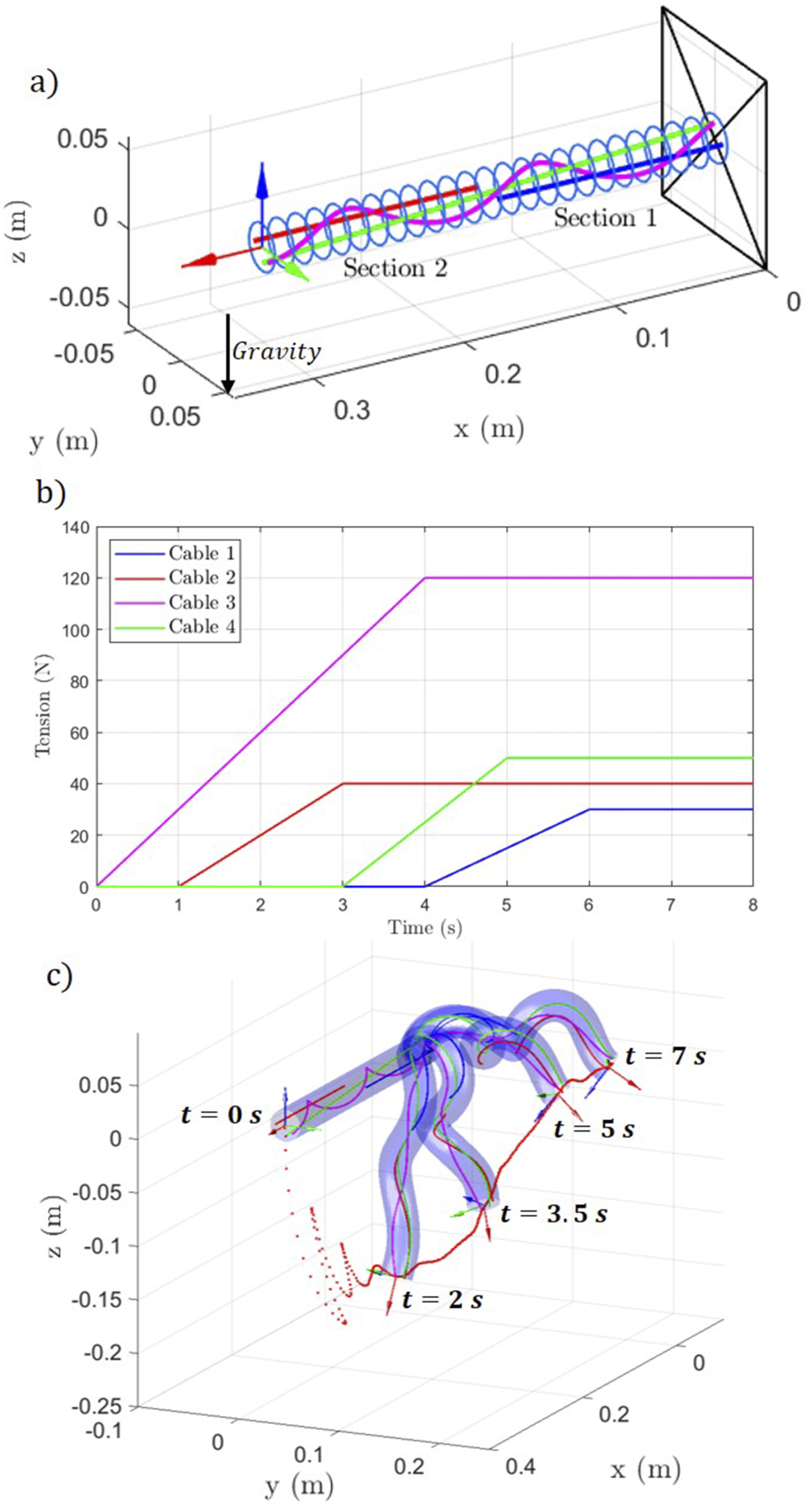

Discontinuity in the actuator path along the robot’s length introduces a discontinuity in the strain field. To capture this strain discontinuity, we divide the robot’s domain into two sections. Note that this approach is theoretically and computationally identical to employing discontinuous strain bases that take the value of zero on selected parts of the robot’s domain. We used a fourth-order Legendre polynomial basis for discretizing the torsional and bending (about y and z axes) strains. This results in 15 DoF for each section of the manipulator (a total of 30 DoF). We actuated the manipulator according to the cable tension profile shown in Figure 12(b) and computed the dynamic response of the system for the first 8 s. The resulting dynamic configurations of the manipulator at different time instants are shown in Figure 12(c). The complex transient behavior of the manipulator due to the combined effect of gravity, actuation forces, and material elasticity can be appreciated from the Figure.
To compare the computational performance, we simulate the same scenario again using a two-element quadratic FEM basis for each section of the manipulator, making the total DoF equal for both cases. For the spatial integration of each section of the manipulator, a five-point Gauss quadrature scheme was used for the global basis, while for the local basis, we used three Gauss quadrature points per element. The simulation time for the analysis using the global Legendre basis is 14.8 s, while the analysis using the local FEM took 18.2 s.
5.2. Locomotion and docking of an underwater soft robot
Biological propellers present in prokaryotic bacteria (Rossi et al., 2017) have recently inspired researchers to develop macro-scale underwater propulsion systems. Such propulsion systems, capable of providing noiseless locomotion, were used to develop underwater mobile robots that are deployable in various underwater applications. The appendage, referred to as the flagellum, is imitated by a silicone-based slender body. The flagellum is rotated about a skewed axis with respect to its body axis. The interaction (buoyancy, drag, lift, and water displacement) with water results in an emergent helical shape that produces the propulsion thrust. Experimental validations and dynamic simulations of a four-flagella robot were presented in Armanini et al. (2022a). The authors used a PCS model for the analysis.
We model the mobile robot as an assembly of rigid and soft links as described in Figure 13(a). We simulate a scenario where the robot swims towards a fixed rod and docks itself by gripping onto it, extending our previous work (Mathew et al., 2022b) for two different base choices. The models for fluid interaction are described in Armanini et al. (2022a), while the contact model extends our previous model by introducing a damping factor. Figure 13(b) is a cross-section of the rod and a flagellum at a given y-coordinate. The contact force is defined as (a) Schematic diagram of the mobile underwater robot. The robot’s shell, represented in blue, is modeled as a rigid body with a free joint. Shafts, represented as black cylinders, are rigid bodies with revolute joints. The green hooks are rigid bodies with fixed joints that orient the flagella’s rotation axis. The flagellate arms in red are modeled as inextensible Kirchhoff rods (angular strains only). The top two flagella have thread-like soft actuators, represented by the purple lines. (b) Schematics of the implemented contact model. The red dashed lines represent a cross-sectional cut at a given y-coordinate.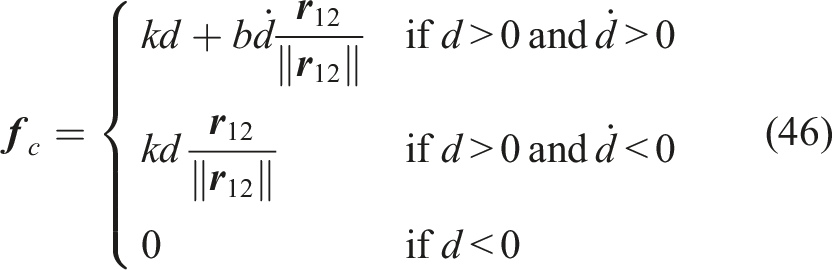
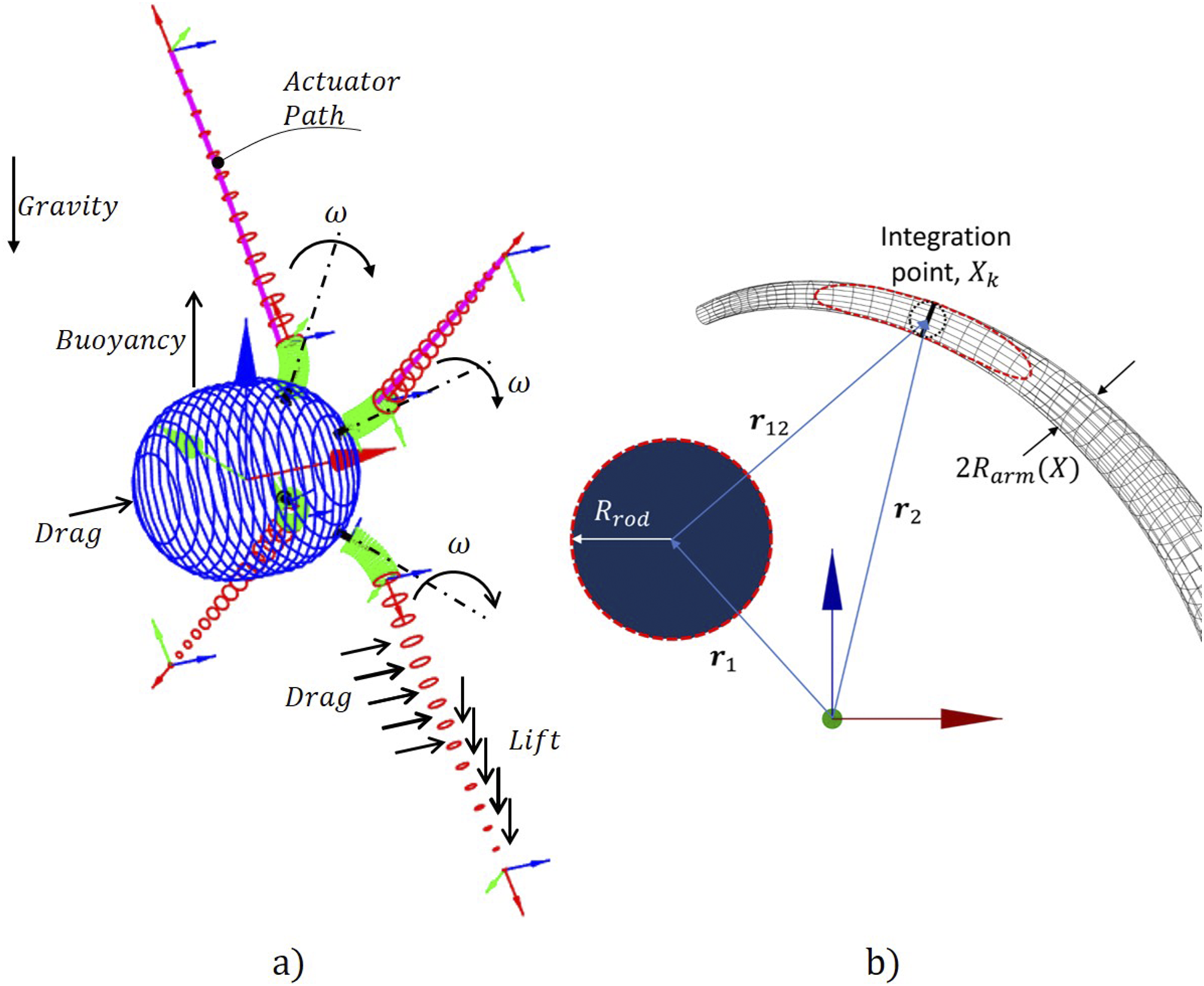
For the dynamic simulation, we use the local FEM linear bases with 3 elements to model the torsional, y-bending, and z-bending strains of each flagellum. This results in a 12-DoF description of the allowed strain fields for each arm. Along with the remaining joints and constraints, the total DoF of the assembly is 58. We rotate the flagella at a constant rate ω = 2π rad/s in pairs in opposite directions to cancel out any resulting moments on the body, preventing unwanted rotation. We rotate the top pair for the first 3 s. Then, for the next 3 s, we rotate the bottom pair. Finally, we rotate all 4 flagella simultaneously for an additional 3 s. Afterward, we allow the robot to slowly approach the rod by stopping the rotation of all flagella for the next 5 s. Figure 14(a) shows the snapshots of the robot locomotion at different times. Snapshots of the underwater mobile robot simulation at different times for both (a) Locomotion and (b) Docking scenarios. The dashed red lines represent the trace of the flagellar arm’s tips over the preceding 2 s.
At t = 14 s, once the robot is in close proximity to the docking rod, we linearly ramped the cable tension to 7.5 N in 2.5 s. The distributed actuation force on the flagella together with the contact model enables the grip between the docking rod and the flagella. Due to this, the robot’s shell is pulled towards the docking rod, resulting in a rigid body contact between them at approximately t = 19.5 s. The snapshots of the gripping scenario are presented in Figure 14(b). To compare the performance of the local basis, we redid the simulation using the Legendre polynomials basis with an equivalent DoF (3 rd order) for each arm. For the integration of the soft links we used two Gauss quadrature points per element for the local FEM basis, while we used a five-point Gauss quadrature scheme for the global Legendre basis. The local FEM basis simulation took 52.47 min (9.75 min for the locomotion and 42.72 min for the docking phase), while the global basis one took 1 h and 53.05 min (12.68 min for the locomotion and 1 h and 40.37 min for the docking phase) to simulate. The increased computational time for the docking phase is attributable to the abrupt nature of contact events, significantly stiffening the problems and stressing the explicit time-integration scheme employed.
5.3. Wind loading on a suspended cable-driven parallel robot
Recently, 3D printing-based construction has gained attention as a method to print entire buildings or construction components. Due to its low cost and design flexibility, the suspended Cable-Driven Parallel Robot (CDPR) is considered a promising technology for this application (Izard et al., 2017; Tho and Thinh, 2021). Suspended CDPR uses steel wire ropes with high torsional and elongation stiffness relative to their bending stiffness as cables. The inertial and elastic properties of the wire ropes may lead to vibration and sagging, which is difficult to capture using existing models.
To tackle this, we recently developed a model of a four-cable CDPR for the first time using the GVS approach (Mathew et al., 2023) (Figure 15). The CDPR is modeled as a hybrid robot of revolute joints, rigid links (end-effector), and soft links. Three closed-loop joints are introduced to model it as a parallel system. In this work, we study the dynamics of this system when an external force, reminiscent of a wind load, is applied to the end-effector. We approximate the wind load as a periodic unidirectional point force, Schematic diagram of the studied suspended CDPR. Three closed-loop revolute joints (CLJ) are represented by dashed lines. The black circles on the end-effector (EE) represent a 2 DoF universal joint which is elaborated in the inset. The geometric and material parameters of the system are provided in Mathew et al. (2023).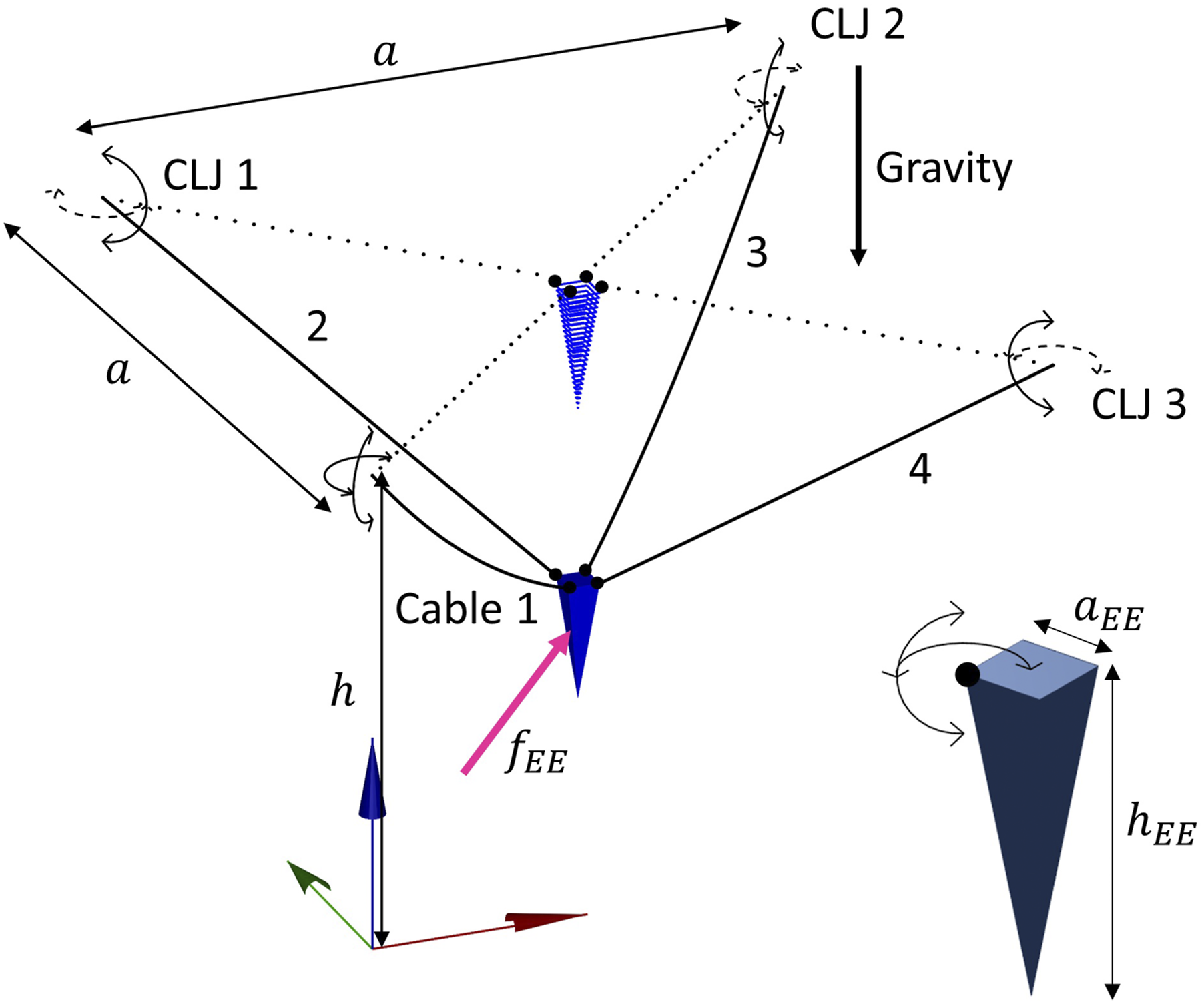
The result of the dynamic simulation is shown in Figure 16. The end-effector tip follows a trajectory in the plane containing the applied load. We can also observe that the cables undergo sagging and exhibit complex vibrations that are captured by the model. The recorded simulation time for 5 s of dynamic analysis of the CDPR was 26.80 min. To compare the simulation speed, we model the bending strains with a global base of equivalent DoF. We used a fourth-order Legendre polynomial basis (5 DoF each) to model the bending strains. The dynamic simulation results were identical, while for the same problem, the simulation took 28.15 min to complete. For the spatial integration of the cables, a five-point Gauss quadrature scheme was used for the global basis, while for the computation using the local basis, we used three Gauss quadrature points per element. Snapshots of the four-cable CDPR at different times. An external load is applied end-effector in the form 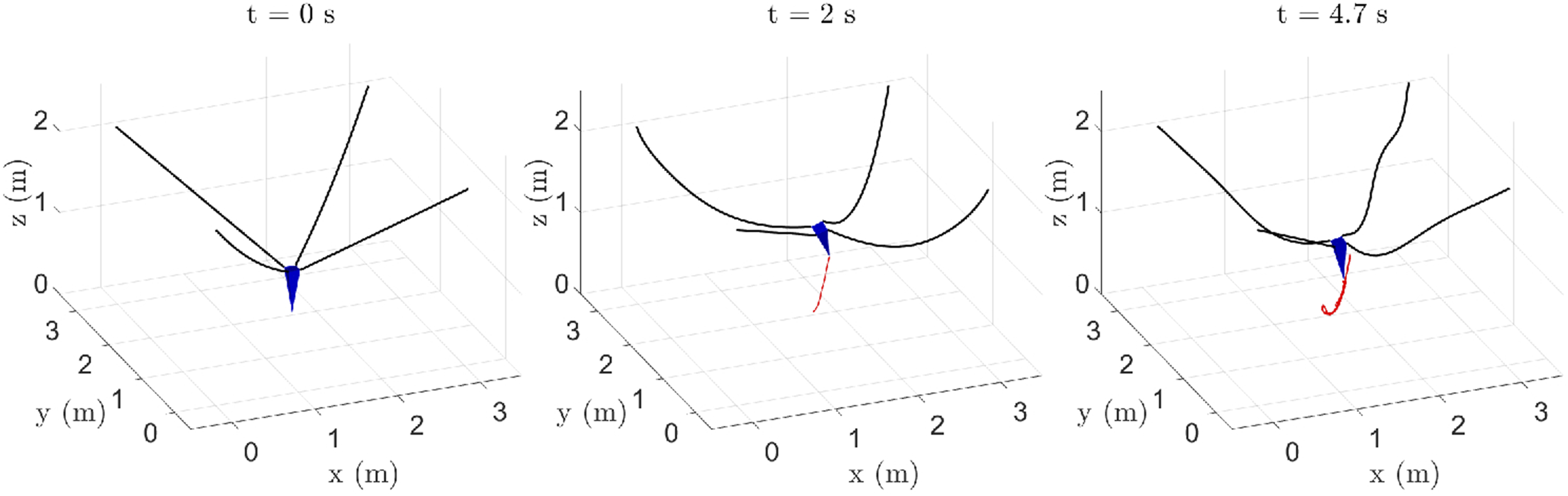
5.4. Dynamics of an octopus arm
Maneuvers of octopus arms aroused great interest among biologists and engineers a few decades ago. Specifically, the actuation of their arms has recently been studied in different works (Wang et al., 2022; Yekutieli et al., 2005. In Wang et al. (2022), Wang et al. used a non-linear model for the curvature given by κ = kϵ/(1 + (ϵ(s − μ)))2. They modeled k as a fixed gain (k = 1.65), μ is the center of the bend, and ϵ is the “extent” of the bend. They compute the actuation moments based on the stiffening wave hypothesis Gutfreund et al. (1998), which alters the stretch and bending stiffness of the arm. The reduced model effectively approximates the bending observed in a real octopus arm. Inspired by this, we study the system dynamics of an octopus arm using a dependent base with our approach.
We model the strain as a combination of the dependent basis function used in Wang et al. (2022) and a second-order monomial basis to capture any additional vibrations of the arm.

In the simulation, we reproduce the curvature shown in Wang et al. (2022), which is based on recorded data of a real arm octopus. Assuming that the moment has the form Schematics of the octopus arm. The arm is subjected to internal actuation forces and external loads.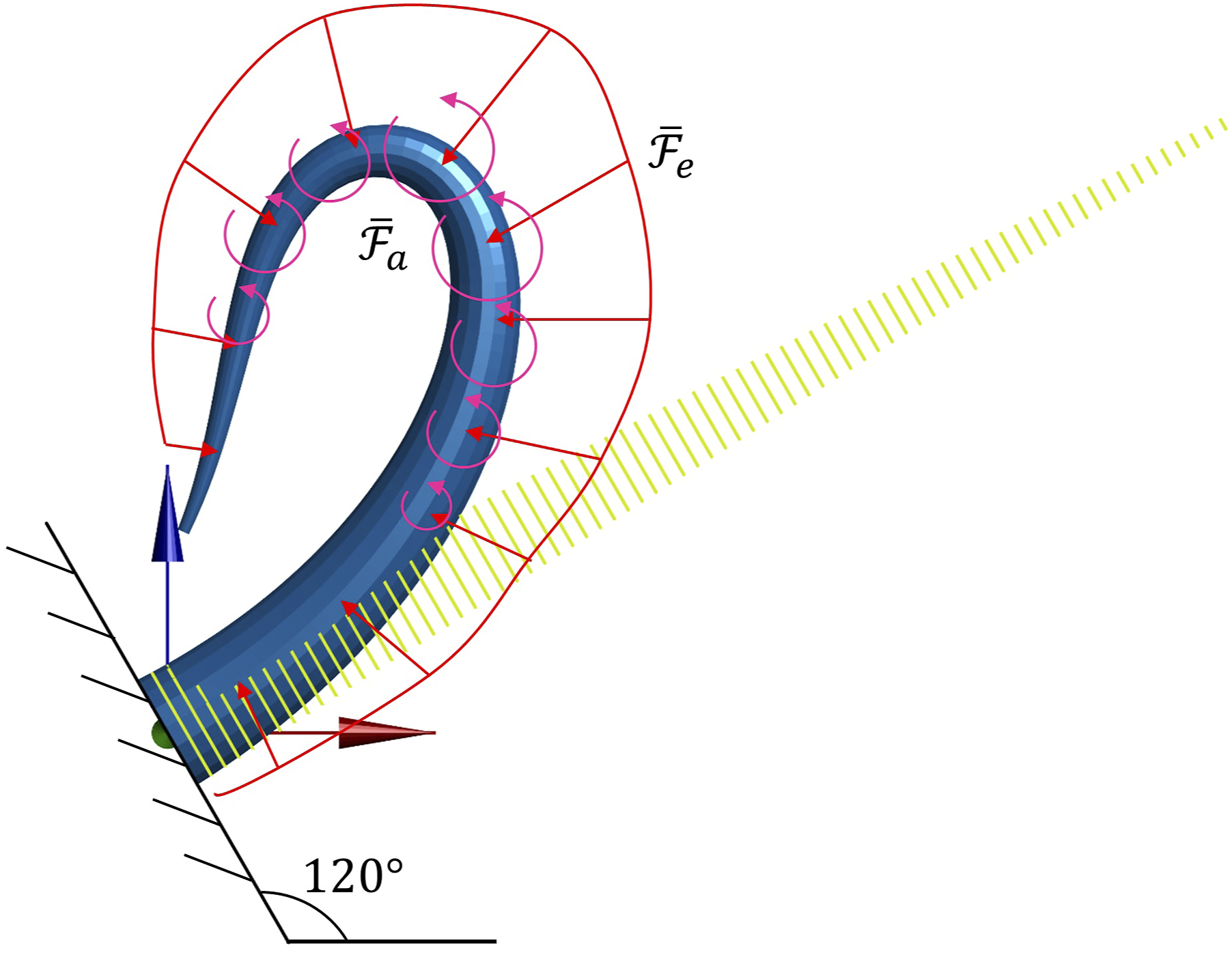
Snapshots of the arm shape and their corresponding strain profile are shown in Figure 18. It is observed that the results appear realistic and allow us to represent the bending propagation of an octopus arm. Also, it is important to highlight that our approach is able to capture the vibration of the system. The vibration is more noticeable in the part of the arm close to the tip because the cross-section is smaller (see the three first snapshots of the strain where the value of the strain close to X = 1 varies from zero to a negative value and after to a positive value in a very short period of time). Moreover, the proposed bases (6 DoF) is compared with FEM Cubic 10 elements (31 DoF). The figure illustrates a very high similarity between the two cases. Notably, the dependent bases exhibit significantly fewer degrees of freedom, suggesting the potential utility of dependent bases in certain scenarios. The simulation time for the dependent bases was 18.91 s, while the FEM case took 174.72 s to complete, both using the ode45 integrator of MATLAB. Snapshots of the octopus arm simulation using the proposed dependent bases. The shape of the arm and the strain through the tentacle is represented in the upper and lower part of the figure, respectively. The Snapshots depict the simulation where the bend propagation of the octopus arm travels from the half of the arm to the tip in 2 s. In the simulation, only bending in Y using the combined dependent basis (47) is used to describe the bending propagation of the octopus arm. The proposed bases (black line) is compared with FEM Cubic 10 elements (blue line). The red rectangles point out the effect of adding a second-order monomial basis to capture the vibration of the octopus arm.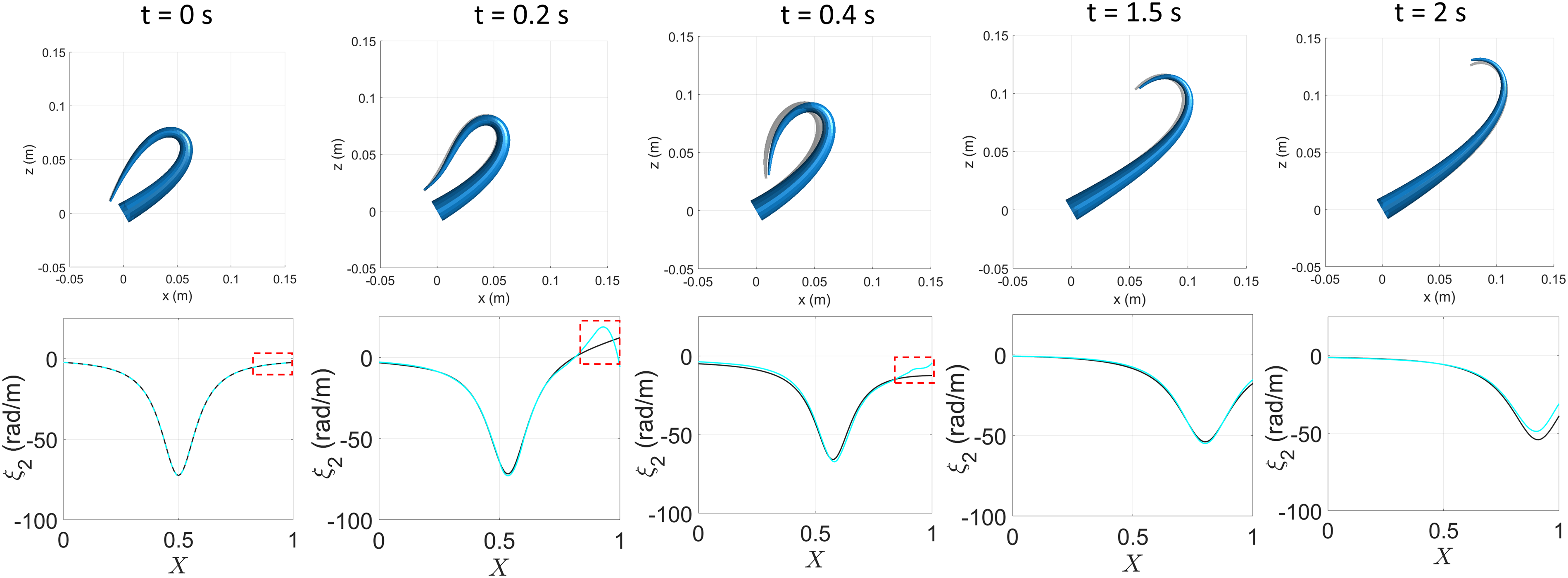
6. Discussions and conclusions
In this paper, we presented the complete formulation of the GVS model. We described a recursive computation of forward kinematics, velocities, and accelerations. With this, we emphasized that the GVS approach models the rigid joints and soft links under the same framework. We introduced “dependent” strain bases, the most general form of strain parameterization, where the strain basis is a non-linear function of generalized coordinates and time. Independent strain bases (not functions of
We compute the components of the generalized dynamics and statics equations using a two-level nested quadrature scheme. The equivalence of rigid joints and soft links, recursive computation of kinematics and their derivatives, and the nested quadrature integration scheme call for a simple algorithm for dynamic and static analyses. The paper includes a three-part Appendix that runs in tandem with the presented model, serving as a guide for readers to develop their own program for specific robotic applications using the GVS model.
Computational speed and position mismatch of different bases solutions for the applications in Section 5.
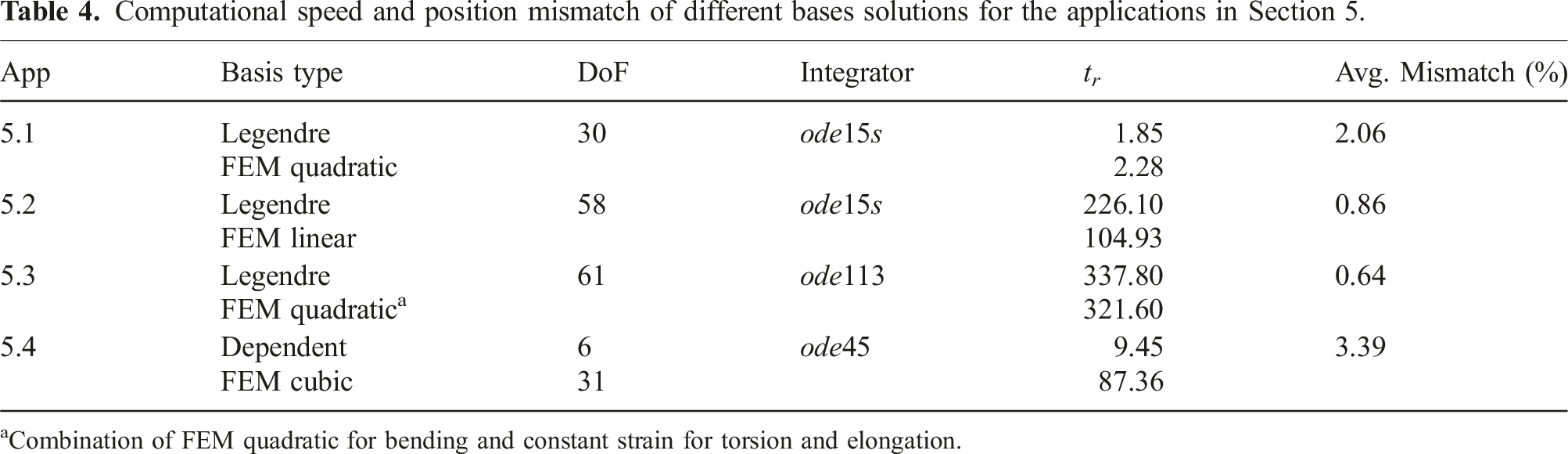
aCombination of FEM quadratic for bending and constant strain for torsion and elongation.
The first three applications presented in Section 5 compare global and local independent bases. In comparing models, we utilized an equal number of DoFs to maintain a consistent baseline for assessing the computational speed. It was observed that, within the specific cases studied, global and local bases with the same DoFs captured similar body position as shown in Figure 19, with minimal mismatch (quantified at less than a 5% difference as reported in Table 4). As for the fourth application, the dynamics of the dependent basis case presented in Section 5.4 using 6 DoFs is compared with that of a 10 element, cubic FEM basis of 31 DoFs. The mismatch is quantified with a maximum of 6.59% and an average of 3.39%, even though one fifth of the DoFs of the local basis case were used for the dependent basis case. The global Legendre basis performs better (23% faster) for the analysis of cable-driven soft manipulators (Section 5.1). In this case, the external force (gravity) and internal actuation loads are of a distributed nature. Global bases, where the basis function spans the entire length, are ideal for capturing such cases. The second example of locomotion and docking of the underwater robot (Section 5.2) is where the true potential of the local basis is revealed. Due to the local contact events and boundary loads, the local FEM basis performs exceptionally better (215% faster) in this case. In the third application of suspended CDPR (Section 5.3), the steel wire ropes are subjected to significant boundary loads. The two different bases considered for this application are: (1) a hybrid global-local basis, which employs a FEM-like basis for bending strains and a global constant strain basis for torsion and elongation, and (2) a Legendre polynomial basis with the same DoFs The hybrid basis performs marginally better in this case: 5% faster. This example also highlights the ability of the model to combine both global and local bases. There are a few limitations for FEM-like bases that warrant consideration: (i) To model different orders of strain for multiple modes of strain, a different number of elements for each strain mode may be needed, increasing the computational cost. (ii) As noted earlier, the minimum DoF for linear, quadratic, or cubic basis is 2, 3, and 4, respectively. (iii) The strain distribution is prone to C1 discontinuity at element boundaries. Comparative analysis of different bases solution for the applications discussed in Section 5. (a) Tip trajectory from the solutions of global and local bases for the cable-driven manipulator (Section 5.1). The mismatch between them, normalized by the manipulator’s length (30 cm), is shown as inset. (b) The trajectory of the shell’s center of the underwater soft robot (Section 5.2) from global and local bases solutions. The mismatch between them, normalized by the shell length (20 cm), is shown as inset. (c) The end-effector tip trajectory of global and hybrid bases solutions for the cable-driven parallel robot (Section 5.3). The mismatch shown in the inset is normalized using cable length (2.47 m). d) Tip trajectory of the Octopus Arm (Section 5.4) of the dependent and local bases solutions. The mismatch between both tip trajectories, normalized by the arm length (20 cm), is shown as inset. The circles indicate the beginning of the simulations (t = 0), while the squares indicate the end.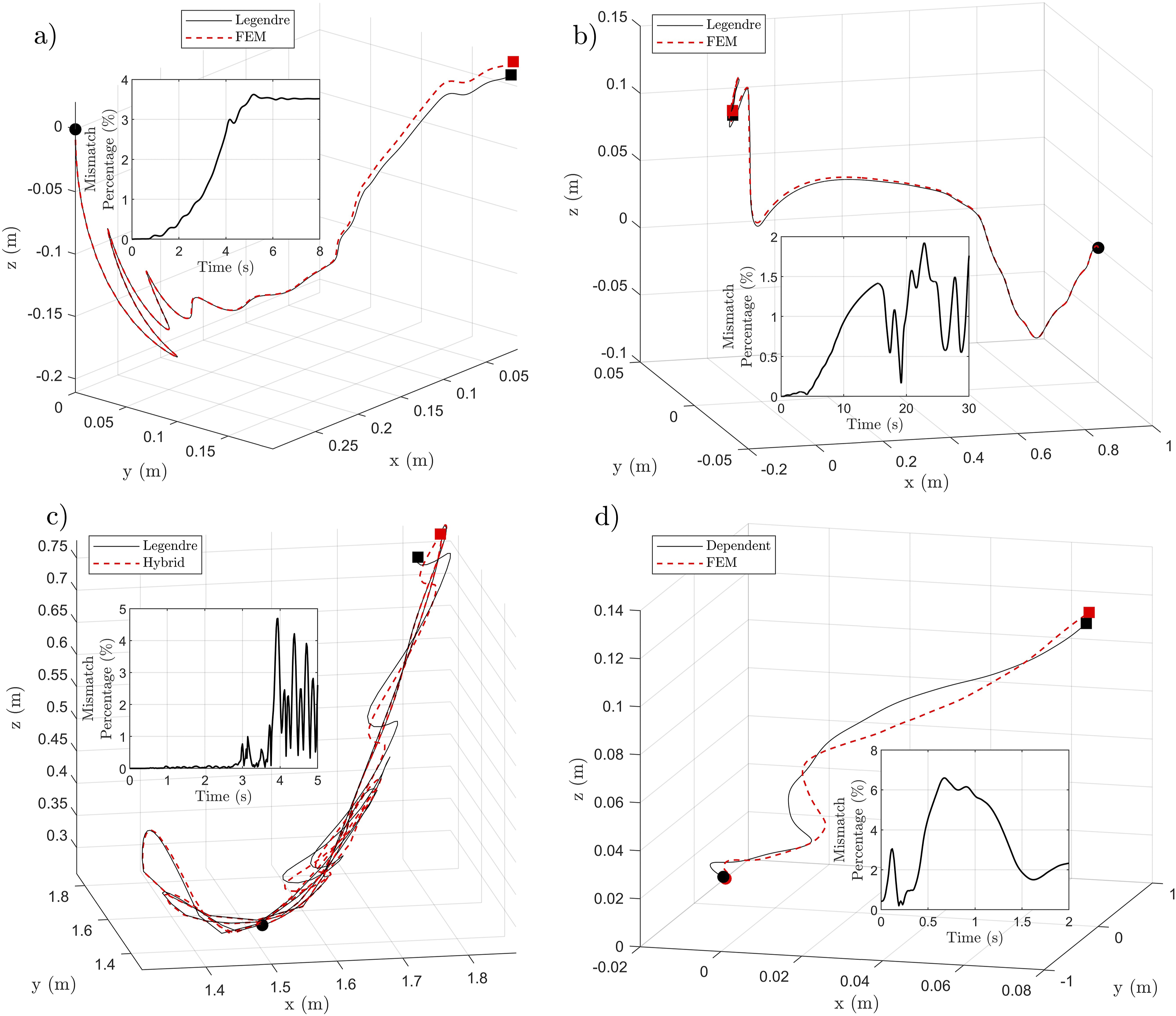
Dependent bases open a new spectrum of bases tuned for order reduction for specific problems. They are ideal for cases when we expect the strain to follow a specific shape. This is emphasized by the illustrative examples in Section 4. Figures 9 and 10 highlight that the dependent basis effectively models the strain profile with very few DoF compared to independent bases. In dynamic simulations, where the system vibration is relevant, combining dependent bases with independent bases is ideal, as demonstrated in Section 5.4. While combining different bases, one must ensure they are not linearly dependent. Consider this case where the bending strain,
The SoRoSim toolbox was introduced to provide a GUI-based black-box experience for users from different backgrounds. We updated the toolbox with all the basis functions presented in this work. We used the new version of the SoRoSim toolbox to perform all simulations presented in this paper. A generic pseudo-code for creating and simulating a robot in SoRoSim is provided in Appendix D. In addition to static and dynamic simulations, the toolbox can be combined with custom-made codes or MATLAB packages to optimize, control, or estimate robotic systems. The new version of the toolbox is available at MATHWORKS and GitHub (Ben Hmida and Mathew, 2023). The executable scripts for the four examples mentioned in Section 5 are available via the GitHub link. New users can find introductory tutorials (MATLAB live scripts) and examples within the SoRoSim source code. The SoRoSim user manual file, along with the YouTube links provided on the website, can assist new users in utilizing SoRoSim. We hope to see the Geometric Variable Strain approach being implemented and the SoRoSim toolbox being used in separate studies.
Supplemental Material
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the US Office of Naval Research Global under Grant N62909-21-1-2033 and in part by the Khalifa University of Science and Technology under Grants RIG-2023-048 and RC1-2018-KUCARS, as well as the French ANR COSSEROOTS (ANR-20-CE33-0001).
Supplemental Material
Supplemental material for this article is available online.
Note
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.