
Abstract
Robotic mapping provides spatial information for autonomous agents. Depending on the tasks they seek to enable, the maps created range from simple 2D representations of the environment geometry to complex, multilayered semantic maps. This survey article is about maps of dynamics (MoDs), which store semantic information about typical motion patterns in a given environment. Some MoDs use trajectories as input, and some can be built from short, disconnected observations of motion. Robots can use MoDs, for example, for global motion planning, improved localization, or human motion prediction. Accounting for the increasing importance of maps of dynamics, we present a comprehensive survey that organizes the knowledge accumulated in the field and identifies promising directions for future work. Specifically, we introduce field-specific vocabulary, summarize existing work according to a novel taxonomy, and describe possible applications and open research problems. We conclude that the field is mature enough, and we expect that maps of dynamics will be increasingly used to improve robot performance in real-world use cases. At the same time, the field is still in a phase of rapid development where novel contributions could significantly impact this research area.
Keywords
1. Introduction
The overwhelming majority of real-world environments are inherently dynamic, which means we can either directly observe the motion of discrete objects or continuous media therein or the results of such motions. Dynamics can take different forms: it can be people walking, flowing air, or changes in the position of furniture. Such manifestations of real-world environments’ dynamic nature significantly affect autonomous systems’ performance. Thus, it is necessary to enable robots to perceive and anticipate the environment’s dynamics to account for them in the planning and execution stages.
Over the years, multiple ways to include information about dynamics in robot reasoning were developed. These methods generally fall under one of the following three approaches. (Figure 1 illustrates the different types of changes in the discussion). Different types of changes (dynamics) that are relevant w.r.t. robot maps. The robot’s present field of view is shown with a transparent blue field. Green arrows denote dynamic objects (the walking person) that change while the robot is observing them. The green solid line denotes the observed track of the walking person, followed by a predicted path, marked with a dashed green line. Items marked in green denote semi-static objects, or configurations of objects, that were not in the robot’s map previously (a new box, the door that has been opened). Items marked in red denote semi-static objects that have disappeared since the robot’s previous observation (a box that has been removed, the space where the door was when it was closed). Finally, the vector field (black arrows) denotes an example of a map of dynamics (MoD). Please note that the MoD is populated also in areas that the robot cannot currently see.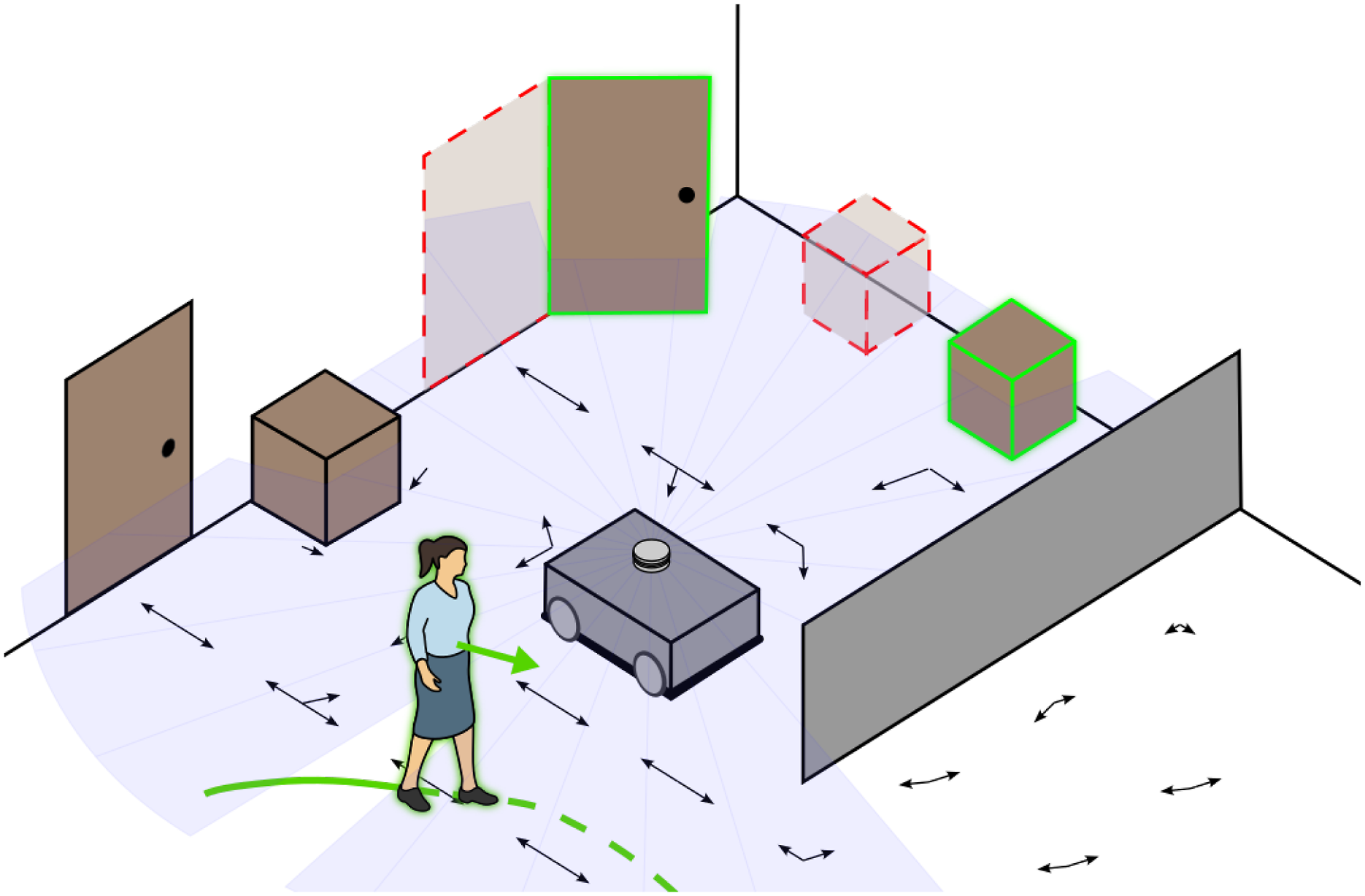
The first is dynamic map maintenance. This approach covers methods that enable robots to perceive the changes in the environment directly to later build a local short-lived up-to-date map or rapidly update and maintain a flexible, global representation of semi-static objects within the environment.
The second one consists of methods focusing on tracking and predicting moving objects’ trajectories. It provides information about the past and future tracks of currently moving objects.
Finally, the third one is map of dynamics. These are spatial or spatio-temporal representations of patterns of dynamics within the environment. MoDs aim at retaining information about the patterns of changes or motion relying on past observations.
Each of the approaches focuses on a different way to perceive and represent dynamics (change retention, trajectory forecasting, or motion repeatability). Moreover, MoDs are the only one among these three approaches not to be restricted by the robot’s perceptual range. The methods focusing on dynamic map maintenance provide information only about the last valid change in the environment. Thus, they are not able to model the environment beyond their observation range. The motion prediction algorithms provide information about the future positions of uncontrolled agents (i.e., people) well outside of the robot’s sensor range, but they still require the initially observed track of a person. Thus, their impact on the robot’s deliberations is spatially limited. In contrast, an MoD enables the robot to anticipate the possible dynamics outside of its perceptual range and in an arbitrary future, enabling the robot to plan beyond the currently observed state of the environment.
Forecasting dynamics patterns can be beneficial in many shared environments. Yet the impact of this information is probably the most visible in large-scale meandering environments, where multiple obstacles limit the robot’s perception capabilities, and the extent of the environment requires the robot to anticipate long-range motions of other uncontrolled agents. In Figure 2, we can see an example of such an environment: an Orkla
1
warehouse in Örebro Sweden.
2
The map represents the shape of the environment, overlaid with an example of an MoD – Spatio-Temporal Flow Map (STeFMap). MoD of Orkla Food’s warehouse with visible motion patterns. We can observe a heterogeneous nature of patterns of dynamics. While most areas follow right-hand traffic, some areas follow more local environment-specific traffic rules.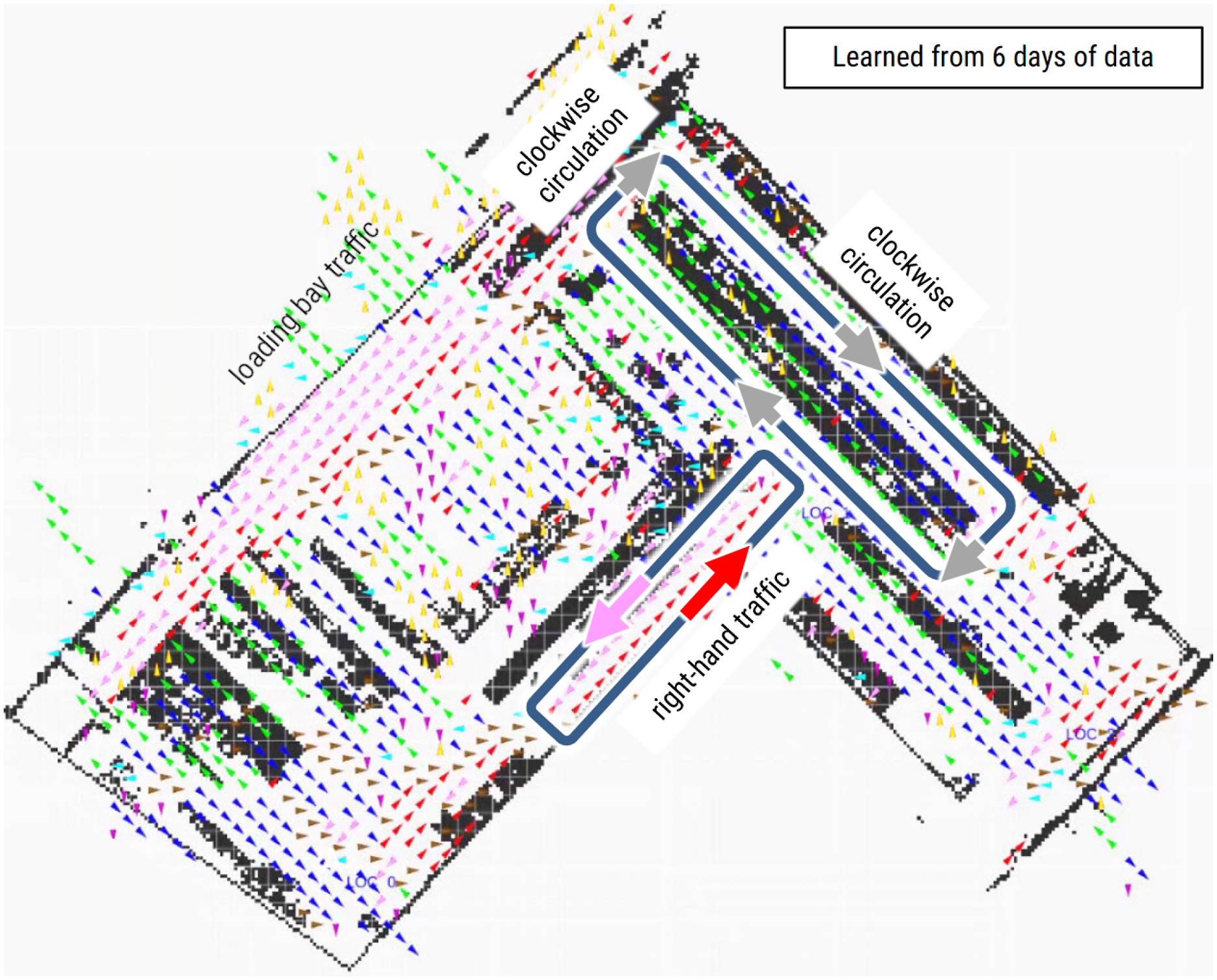
In this particular example, the robot while operating autonomously has to safely navigate through a network of busy narrow passages between the shelves. Because of the obstacles, the robot can rarely see beyond the currently travelled passage. Furthermore, the high intensity of motion and multiple exit-entry points limit the applicability of motion prediction algorithms because the agents, that in the future might affect the robot’s behaviour, are well outside its perceptual range.
In this particular example, in the MoD we have highlighted two distinct motion patterns: clockwise circulation and right-hand traffic. The right-hand traffic rule is fairly intuitive and can be easily hard-coded into the motion planner of the robot. That said, the clockwise circulation is a unique feature of this part of the environment: without the MoD, the planner would provide solutions that are short but that might violate the unwritten traffic rule. When deploying a robot in such an environment, where the high pace of product transportation is crucial, a violation of such locally accepted unwritten rules can lead to unnecessary disruptions, thus lowering the acceptance of the robot or even leading to accidents. In such a case, the MoDs enable a robot to plan compliant motions, mitigating the need for overtaking, passing, or excessive yielding to other agents within the environment.
Considering the impact of dynamics on a robot’s performance, it is crucial to provide the community with a thorough overview of the existing contributions, discuss the applicability of existing methods, and point further development directions. This need is especially evident in emerging fields, which are mature enough to have substantial and consistent contributions but are still undergoing rapid development. Out of the three approaches listed previously, MoDs is the youngest. Although MoDs are already a well-established field, they have not yet received a comprehensive survey. Thus, the ambition of this paper is to provide one. However, we do not want to limit ourselves to a structured annotated bibliography but instead address the four fundamental needs of the field:
To fulfil the aforementioned four needs, we have structured the remainder of the paper around the following five objectives:
The objectives also play the role of the reader’s guide. Newcomers to the field are encouraged to read sections related to objectives O1, O2, O3, and O4. That said, for first-time readers, it is not necessary to read in detail content related to O3. Readers familiar with the field and looking for methods suitable for their current problem should look into content related to objectives O3 and O4. Finally, the experts interested in further development of the field are invited to read sections addressing objectives O4 and O5.
We also want to highlight the relationship between this paper and the earlier book by Kucner et al. (2020). Both publications have some similarities and overlaps, yet their scope is significantly different. The book (Kucner et al., 2020) is designed as introductory material covering basic concepts of MoDs and their applications through the perspective of authors’ own contributions Conditional Transition Map (CT-Map) (Kucner et al., 2013), and Circular- Linear Flow Field Map (CLiFF-Map) (Kucner et al., 2017). In contrast, this publication focuses on providing a complete and systematic overview of the field spanning beyond the authors’ own works.
2. Scope
The problem of spatial models of dynamics has already been studied across different fields, that is, meteorology and oceanography (Ardhuin et al., 2007), Computational Fluid Dynamics (CFD) (Versteeg and Malalasekera, 2007) or crowd analysis (Zhan et al., 2008). The importance of contributions made in them cannot be overstated, and their impact on robotics is clearly visible. However, these domains have already a large number of domain-relevant survey papers and handbooks (selection of the key ones in the most relevant fields can be found in Section 7), thus addressing them in this work will be redundant. Instead, we have decided to focus on the area of map of dynamics for mobile robots, which according to the authors’ best knowledge has not yet received an adequate survey and is in urgent need of one. In consequence, at the centre of our focus, there will be representations relevant to ground robots, primarily addressing the problem of modelling dynamics of discrete macroscopic objects.
Furthermore, taking into account that the field of MoDs is undergoing rapid development, we also provide a summary of the areas of applications in the context of mobile robotics.
3. Background
In the previous sections, we relied on an intuitive understanding of such fundamental terms as dynamics or maps. However, both terms are widely used across different fields, and their definitions vary from field to field. For instance, in the field of classical mechanics, dynamics concern the study of forces and torques and their effect on motion. A dynamical system in mathematics refers to a system in which a function describes the time dependence of a point in a geometrical space. In computer science, a dynamic data structure refers to an organization or collection of data in memory that has the flexibility to grow or shrink in size.
In the context of mobile robotics the term dynamics is much less ambiguous and is usually used to describe external, uncontrolled moving entities. That said, this term is not often used in relation to environmental features. Thus, to apply this term in the context of MoDs, there is a need to redefine it. The first attempt to define dynamics as an environmental feature was proposed by Hähnel et al. (2003). In their work, the authors state that an environment is dynamic if it changes or if moving objects are present therein. This indirect definition of dynamics is formulated such that it primarily focuses on macroscopic objects. Meanwhile, contemporary robotics finds its application in a multitude of environments where not only macroscopic discrete objects are dynamic. In fields like aerial and marine robotics, the dynamics also include the flow of water and air, respectively. Thus, the definition by Hähnel et al. (2003) does not cover such types. To mitigate this limitation, we propose the following definition of dynamics in the context of robotics:
Dynamics are any directly or indirectly perceivable motions.
Such a formulation of dynamics captures both motion of discrete objects and continuous media (they are both perceivable with adequate sensors, that is, anemometers, speedometers, radars) This definition further includes semi-static objects. For such objects (i.e. chairs, cars), the motion is not perceivable directly (the motion of an actual object has not been perceived), but the result (indirect observation) can be. Another key term in this work is a map, which will be understood as defined in (IEEE, 2015):
Map (robot map) – represents the robot’s knowledge about its workspace and surrounding environment as well as objects contained therein.
Finally, the third key term is a map of dynamics. MoDs are the subset of the robotic maps. They represent a particular aspect of the robot’s knowledge about the surrounding environment. However, as pointed out in the previous section, there are multiple ways to represent dynamics spatially. Thus, it is necessary to provide a more specific definition, which differentiates MoDs from the results of motion prediction algorithms. The critical feature of MoD, which sets them apart from other representations, is reliance on repeating spatial and temporal patterns of dynamics. Thus, we propose the following definition:
A map of dynamics is a queryable model of spatial or spatio-temporal patterns of dynamics.
As we have already pointed out, spatial models of dynamics patterns are not limited to robotics, but over the years, multiple fields have investigated this problem. Probably the most fundamental one is CFD, which is dedicated to modelling continuous media flow. The methods developed within this field have found application in meteorology and oceanography (Blevins, 1984). CFD has also found application in robotic olfaction (Wiedemann, 2020) and Unmanned Aerial Vehicle (UAV) (Sreelakshmi and Jagadeeswar, 2018).
4. Taxonomy
The taxonomy used in this paper extends and modifies the classification proposed by Kucner et al. (2020). In contrast to the original one-dimensional classification, which only focuses on the type of data represented in the map, the proposed one is two-dimensional and accounts also for the type of representation.
4.1. Taxonomy of dynamics
Dynamics, as defined in Section 3, covers a broad and versatile range of phenomena, in which the common denominator is a motion of physical objects. Thus, before addressing the problem of the map taxonomy, we will start by discussing the taxonomy of dynamic phenomena.
In cases where dynamics are caused by relatively few objects in an environment whose length scales is comparable with the distances between the objects (i.e. people at a shopping mall, cars passing through a single intersection), we will be talking about sparse dynamics. In contrast, in cases when we are coping with a large number of objects in an environment whose length scale is substantially greater than the distances between the objects (i.e. dense crowd at the airport, airflow), we will be talking about dense dynamics.
Both of the classes can be split further. The dense dynamics borrows its two sub-categories, laminar and turbulent, from CFD. Laminar dense dynamics are when the dynamic objects follow smooth paths in layers with little or no interference between each other. Turbulent dense dynamics are when the dynamic objects tend to change their direction and speed abruptly and their trajectories intersect.
In the case of sparse dynamics, the split is based on the observability of the object’s motion. The first subclass called active is constituted by objects that can be observed while moving, and they do not remain in a single state for extended periods. The second one called semi-static consists of objects whose motion is usually not observed, and they tend to remain in few configurations within the robot’s environment for extended periods. However, their position changes over the life-time of the used map.
It is important to emphasize that the presented classification of dynamics is context-dependent, that is depending on the circumstances the same instance of a physical object can belong to different classes. For instance, a car when perceived in the context of a parking lot will most likely fall into the category of sparse semi-static dynamic objects. However, when on the highway it will rather belong to a sparse active class or dense laminar.
The relation between classes and subclasses is shown in the top part of the Figure 3. Classification based on dynamics type. The top part of the diagram presents the typos of the dynamics based on thier types, while the botom shows what types of reprsentations are suitable for them.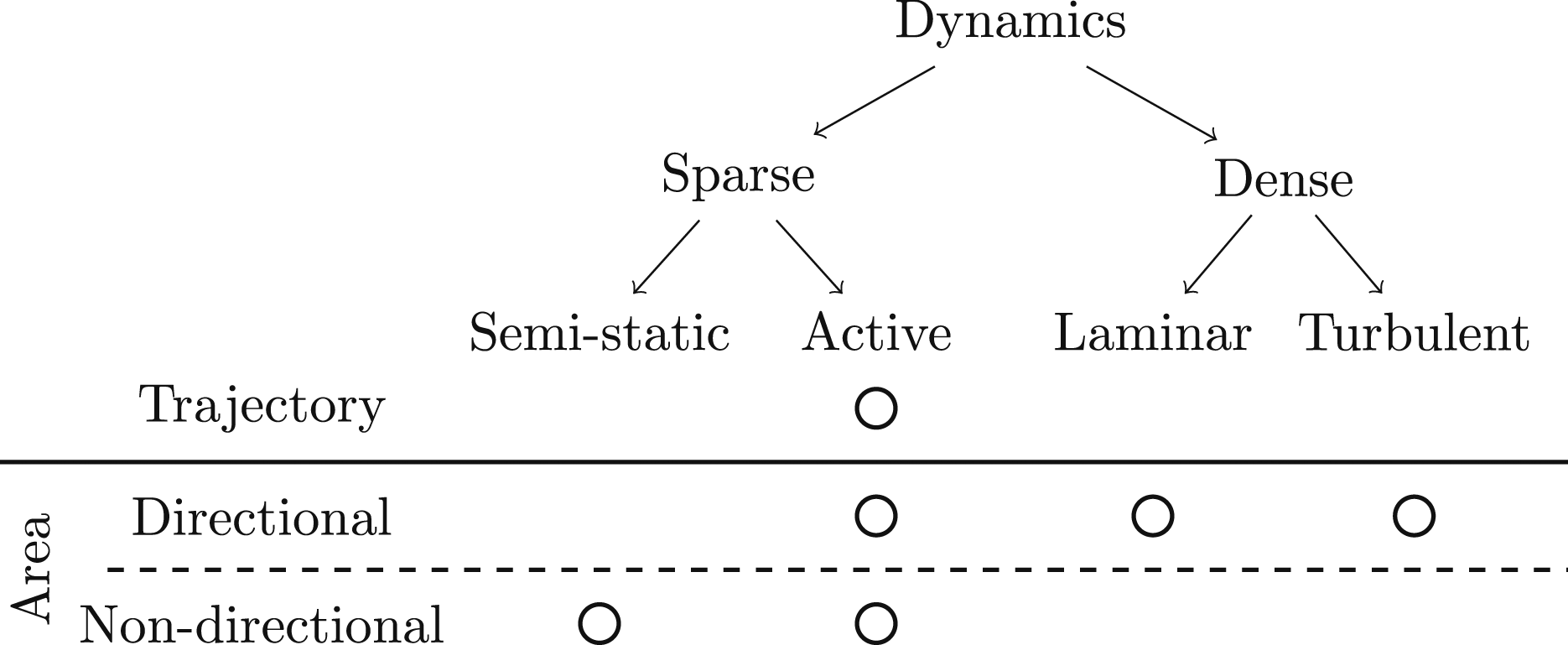
4.2. Type of data
The dynamics can be perceived through multiple means directly (i.e. Doppler radars, anemometers) or indirectly (i.e. image sequences, laser scans), which in combination with the existing processing methods give numerous types of data representing different aspects of dynamics. In Figure 3, we present what types of information can be extracted from the observation of different types of dynamics. We primarily split the representations into trajectory-based (arbitrarily described curve within the environment followed by objects) or area-based (an area or volume within which the objects tend to follow common motion patterns.). This split stems from the fact that for some types of dynamics, it is possible to observe it only in one particular way or the problem at hand requires a particular type of data.
Area-based representations can be directional or non-direction, describing respectively either the translational nature of dynamics (i.e. velocity, heading) or the in-place nature of dynamics (i.e. intensity, state change probability). Both groups of area-based representations can be either independent or dependent. Independent representations assume that the dynamics in the given location is not affected by its neighbourhood. In contrast, dependent representations retain information about spatial interactions between the model parts.
It is important to emphasize that not all types of dynamics will be able to produce all three types of data. The trajectory data can be only efficiently obtained for sparse active objects whose motion is observed by the robot. In the case of dense dynamics, where the motion of objects is perceived en masse, obtaining individual trajectories is either infeasible or not desired. Furthermore, considering that semi-static objects are rarely (if at all) observed in motion between their locations, building a trajectory-based model for them is impossible.
In the case of directional data, they can be obtained for dense dynamics as well as for sparse active objects. In the case of semi-static objects, once again the directional information is not available, because the motion is not directly observable. Finally, non-directional data, in different forms, are available for all categories of dynamic phenomena.
4.3. Type of representation
The second dimension of the proposed taxonomy focuses on the types of representations. We have identified two large classes of representations. First are generalizing models: these representations, based on specific observations, infer a general model of dynamics. In most of the cases, they will substantially overlap with generative models as we know them from machine learning.
We further split the generalizing models based on their relationship with time. We have identified three groups: • Time Agnostic – MoDs that assume the motion patterns do not change over time; • Event-based – MoDs that retrieve the current spatial model of dynamics based on the most recent observations; • Temporal – MoDs that assume that motion patterns are time-dependent and their changes can be predicted.
On the other end of the spectrum, we have specific models, which focus on storing complete or partial sets of past observations. These representations resemble databases, where records are stored in an easy-to-query way.
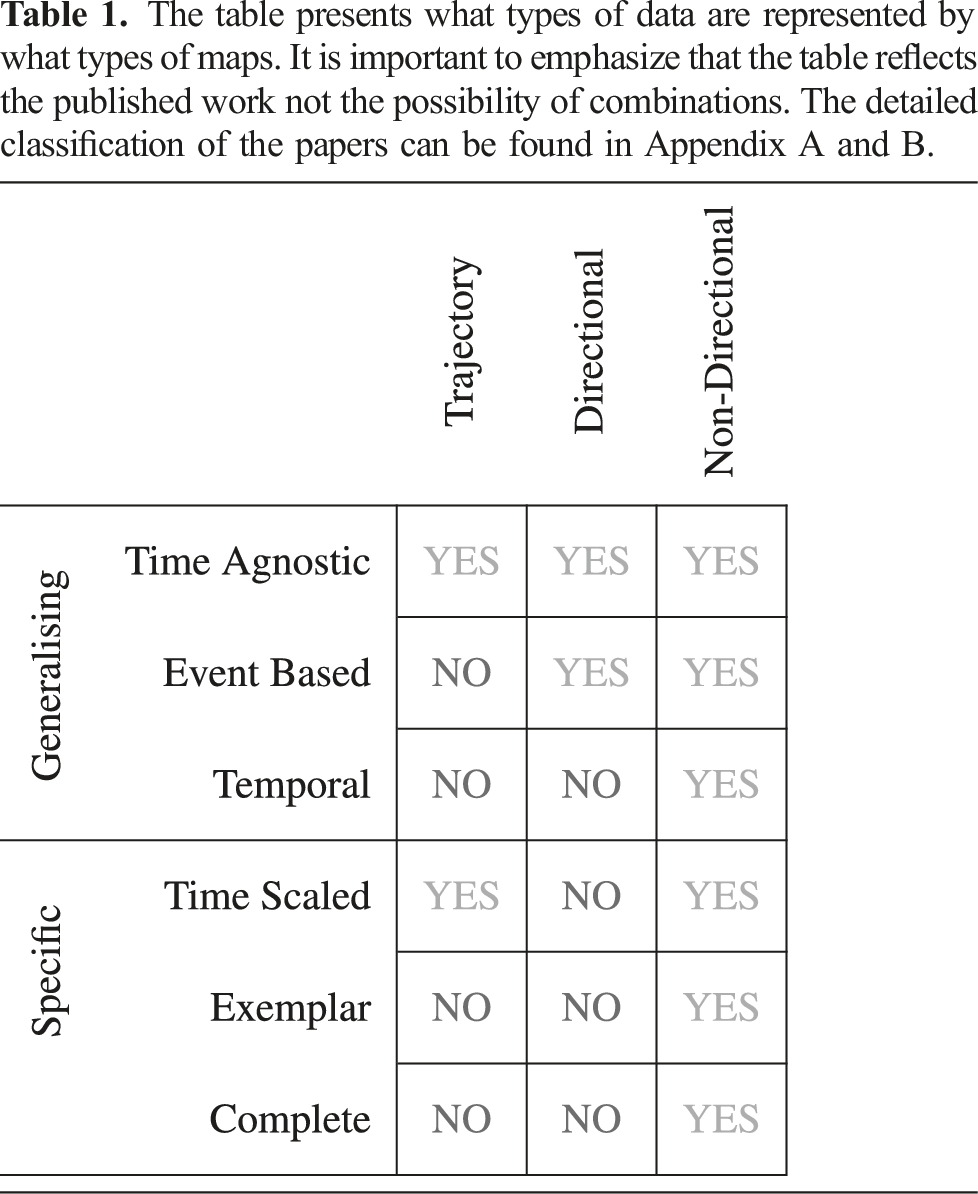
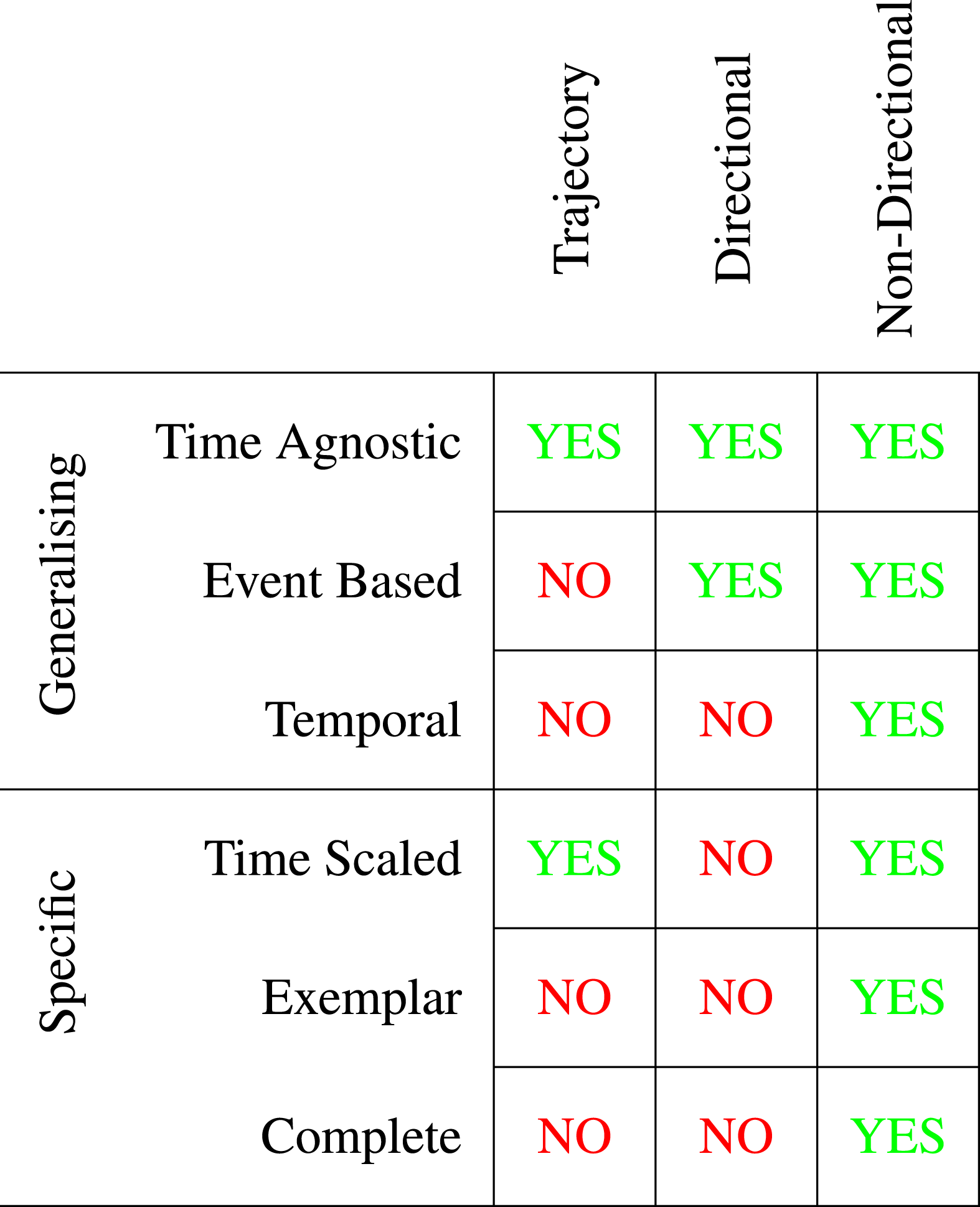
Specific models are split into three categories based on how they select the information they store: • Time Scaled – store a limited amount of past observations representing the most recent changes in the environment, following given timescales; • Exemplar – store a limited number of environment configurations capturing those corresponding to the most relevant observations; • Complete – store a complete history of environment configurations. • The Table 1 presents how the existing representations splits according to the type of data and type of the represeantion. It shows that not all posible combinations have been explored, and thus brings a question if they are possible. The Table 1 presents how the existing representations splits according to the type of data and type of the represeantion. It shows that not all posible combinations have been explored, and thus brings a question if they are possible.
5. Survey
5.1. Introduction
This section is organized according to the taxonomy presented in Section 4. The text is split into subsections according to the three types of data (see Figure 3): trajectory, area-directional, and area-non-directional. Later on, each subsection will be further split along the second dimension discussed in the taxonomy – the type of representation.
5.2. Trajectory
Trajectory maps are based on the assumption that there is a finite set of paths that objects can follow in a given environment. Thus, the focus is put on identifying said paths and describing them and their possible realizations by autonomous agents in compact ways.
Trajectory maps were not originally developed within the robotic community, but in the computer vision community, where they have been developed for more than 25 years (Johnson and Hogg, 1996). However, it is important to mention that the robotic community has recognized the benefits of using such maps almost immediately (Appenzeller et al., 1997; Freitas et al., 2004; Kruse et al., 1997).
Furthermore, the problem of trajectory maps was also approached, almost simultaneously, by other communities, that is, data mining (Chen et al., 2011, 2012; Gaffney and Smyth, 1999; Li et al., 2010; Nanni and Pedreschi, 2006; Pelekis et al., 2009, 2017; Tang et al., 2019, 2020), intelligent transportation systems (Atev et al. 2010; Choong et al. 2016, 2017; Li et al., 2006; Portugal et al., 2020; Song et al., 2017; Wang et al., 2019, 2020; Won et al., 2009), air traffic (Enriquez and Kurcz, 2012), and maritime traffic (Dutt et al., 2018; Kontopoulos et al., 2021; Liu et al., 2014a; Li et al., 2017). The detailed discussion regarding relevant publications coming from these fields is presented in Section 7.
Within robotics, trajectory maps have found two key applications. The first one is their use for improving the navigation of robots in shared spaces (Bennewitz, Burgard and Cielniak, 2003; Bennewitz, Burgard and Thrun, 2003; Bennewitz et al., 2002, 2002b, 2005; Freitas et al., 2004; Fulgenzi et al., 2008, 2009; Sasaki et al., 2010; Sehestedt et al., 2010; Tanzmeister et al., 2014; Thompson et al., 2009). The second one is for improved motion prediction (Bowu et al., 2012; Sung et al., 2012; Vasquez and Fraichard, 2004; Vasquez et al., 2006, 2009; Zhi et al., 2020). A detailed discussion covering the applications of trajectory maps is presented in Section 6.
5.3. Area - directional
As we have already pointed out, area-oriented MoDs focus on capturing motion patterns in the neighbourhood of a given point. Thus, they usually neglect the global aspects of motion (in opposition to trajectory maps), but they still focus on the directional nature of motion such as velocity or direction of the transition.
Directional MoDs primarily fall into the category of generalized models. The key contributions in this class build upon the concept of the random field. That is, they can be understood as functions that map the continuous or discrete 2D space to a set of random variables, out of which at least one denotes direction.
To further organize the contributions in this class, we will split the existing methods further into occupancy-bound and non-occupancy-bound. This division is coming from the fact that occupancy-bound representations model the evolution of occupancy, which is a proxy for real-world dynamics. In contrast, the non-occupancy-bound methods utilize more direct measures of dynamics.
The idea of building a model of directional dynamics based on occupancy changes was first proposed in 2013 by Kucner et al. (2013). In this work, the authors introduced CT-Map. The key idea behind CT-Map is that the occupancy representing the moving object cannot disappear or be created but it has to shift among adjacent cells of the map. The authors utilize this assumption to build a conditional representation (see Figure 4). In this representation, each cell is associated with a set of conditional probabilities describing the probability of exiting into one of eight neighbours, given the occupancy entry direction. Example of one cell of CT-Map where the probabilites of exits are conditioned on entry from the left (Kucner et al., 2013).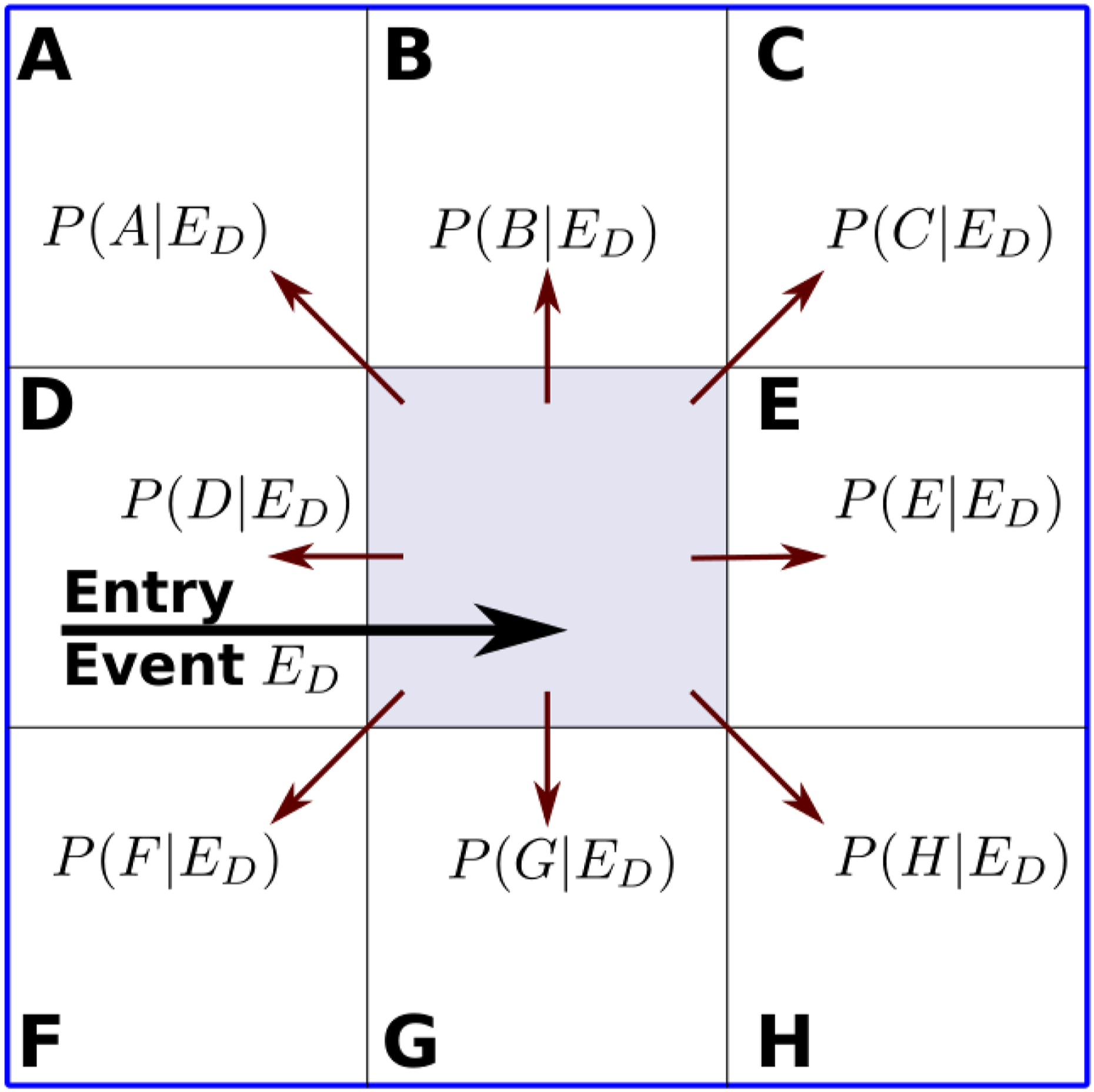
Similarly, the concept of dependency of occupancy changes using Input-Output Hidden Markov Model (IOHMM) has been explored by Wang et al. (2014). In this approach, the authors build a network of connected Markov chains, where each Markov chain describes the probability of state change for each cell on the map considering the cell’s neighbours. In Figure 5, we can see an example of IOHMM for two adjacent cells. The probability of state change is denoted as Example of IOHMM for two adjacent cells, showing how the chaing in their states impact eachother (Wang et al., 2014).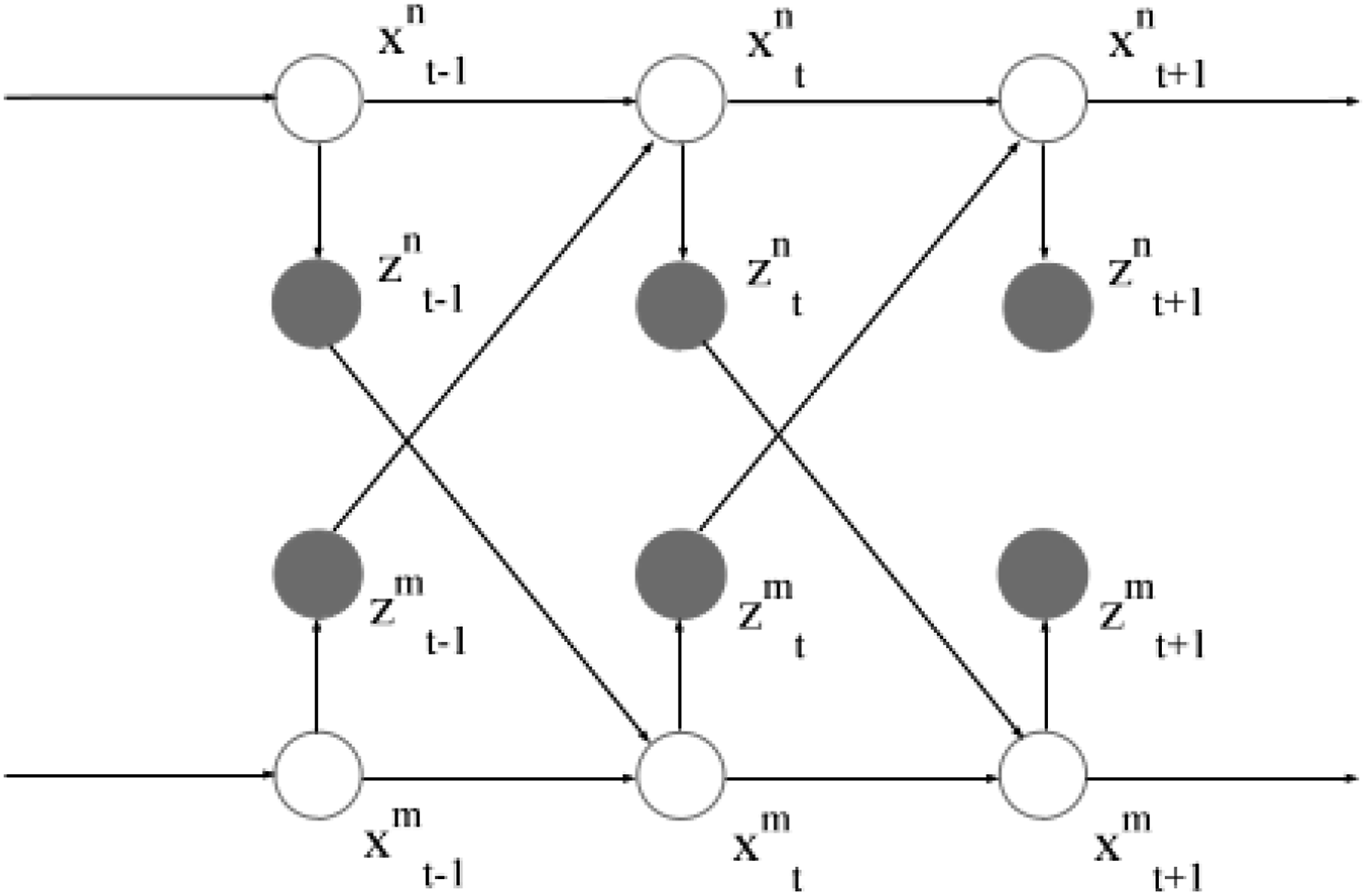

One year later, (Wang et al., 2015) proposed an extension to IOHMM that accounts not only for the changes in the occupancy of adjacent cells but also includes the information about the origin of the trajectories. The extension was handled by adding another level of input to the IOHMM. This additional level handled long-term information about the points of origin of different trajectories in the environment. This modified representation, called Multi-scale Conditional Transition Map, is a hybrid between Occupancy Grid Map (OGM) bound and non-OGM bound representations. This approach was further expanded in work by Wang et al. (2016), where on top of the information about the direction, the authors added also semantic information classifying the types of the motion patterns (i.e. open space with no dominant, directions, pathways).
The first approach, where the dynamics is not modelled as a shift of occupancy was proposed by O’Callaghan et al. (2011). In their paper, the authors present the idea of building navigational maps (see Figure 6). A navigational map is a layered representation, where each layer models a potential field capturing the generalized motion patterns followed by people towards a goal in the environment from an arbitrary point in the environment, executed by observed agents. The representation provides an invaluable source of information about typical social patterns followed by agents in the environment and in consequence qualitatively improves the resulting trajectories. That means the navigational map enables the robot to follow socially acceptable patterns in the environment (i.e. follow road crossings). The representation proposed by O’Callaghan et al. (2011) falls into the category of time-agnostic generalizing models. In later years, the idea of building directional maps was further explored by Jumel et al. (2017), Kucner et al. (2017), and Senanayake and Ramos (2018), although in contrast to the earlier work by O’Callaghan et al. (2011), these authors capture the multimodality not in separate layers of the map but by employing multimodal probabilistic models. Example of the navigational map built based on observed trajectories of humans crossings the road (O’Callaghan et al., 2011).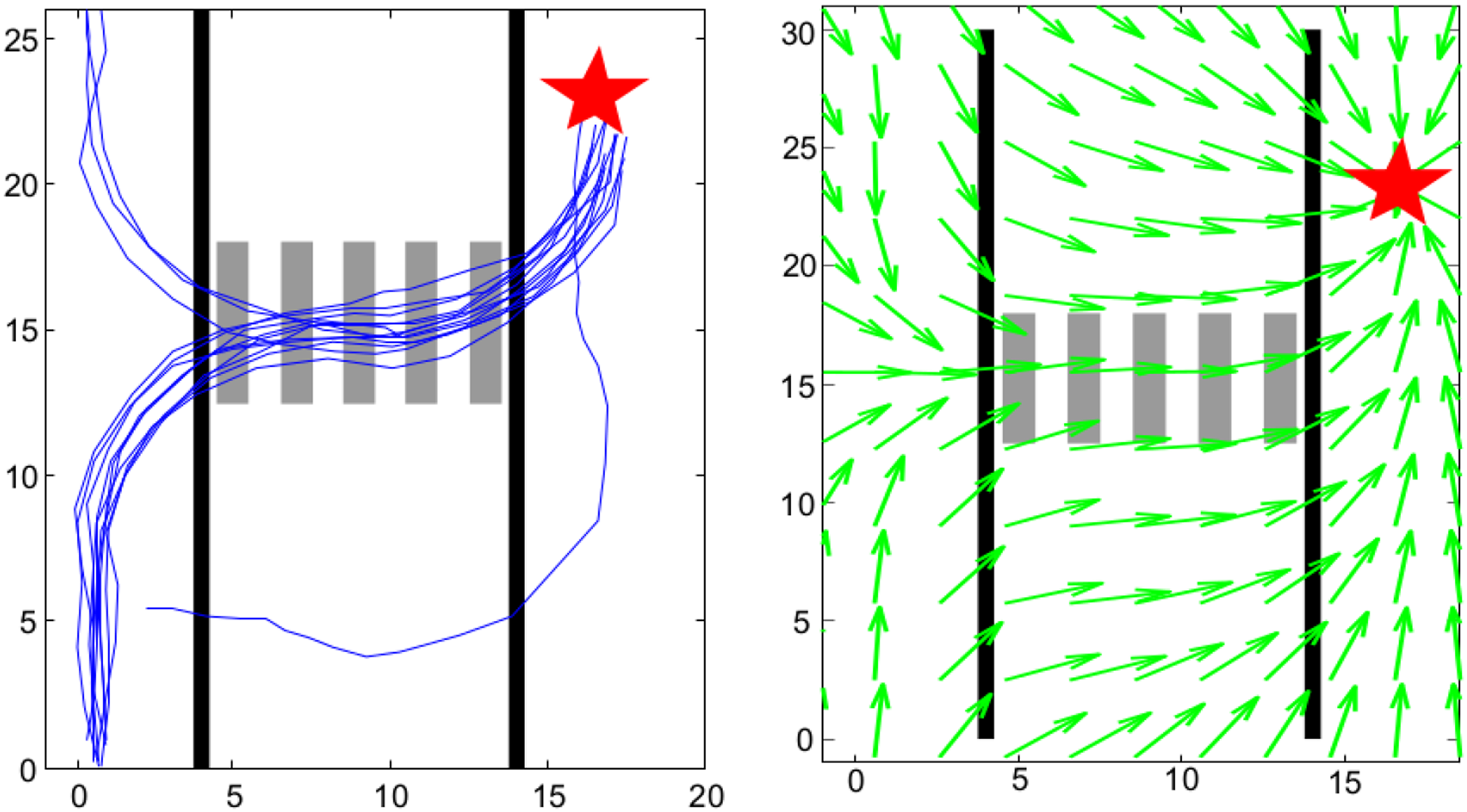
Another approach for modelling dynamics using augmented dictionary learning was proposed by Chen et al. (2016). The idea here is to use augmented semi-nonnegative sparse coding for solving a constrained dictionary learning problem. The key idea is to use grid-based representation to capture the multimodal nature of the motion of discrete objects. That said, in contrast to the later representations it is not well suited for representing the uncertainty or variability of the encoded motion patterns.
In their work, Kucner et al. (2017) introduce CLiFF-Map, which associates to an arbitrary grid of discrete locations a set of Semi-Wrapped Gaussian Mixture Model (SWGMM) denoting the distribution of velocities in the vicinity of the given location. The idea behind SWGMM is that it is possible to project a linear variable on a unit circle by reducing it by modulo 2π

This allows accumulating probabilities over all overlapping points x = θ, θ ± 2π, θ ± 4π… and therefore to define a many-to-one mapping g(θ) in terms of the density of X (denoted by f(x))

This mapping allows for the transformation of the wrapped random variable into a linear one. Through this operation, it is possible to jointly represent the speed and direction of motion.
A similar approach, called Directional grid map (DGM) is proposed by Senanayake et al. (2020) and Senanayake and Ramos (2018). However, in contrast to the work of Kucner et al. (2017), the authors use a von Mises distribution to model the direction of motion, and to each mode of this distribution the authors associate a β-distribution to model the speed. The authors claim that this approach allows for a better model of each component individually. That said, building such a model assumes that the direction of motion within a mode does not affect the speed.
All the methods discussed so far in this section belong to the time-agnostic class; meaning, they assume that speed does not change over time. Such an assumption, although convenient, does not hold true in all real-world scenarios (see Figure 7). Fluctuation of human motion patterns in ATC-data set (Sasaki et al., 2010) Ground truth for the intervals (left to right) 09:00 to 13:00, 13:00 to 17:00 and 17:00 to 21:00 (Molina et al., 2018).
One of the early approaches to address this problem was proposed by Jumel et al. (2017). Similarly to the previously mentioned works, also in this paper authors focus on modelling the flow of people, but they relax the assumption of the stationary nature of the process and incorporate a continuous learning module. In consequence, the map is continuously updated in such a way as to best reflect the current flow of people through the environment.
To mitigate this limitation, Molina et al. (2018) introduce STeFMap. STeFMap uses a discrete representation of motion direction (the authors propose to use eight bins covering an π/4 opening angle each). Each of the discrete directions in each cell is associated a Frequency Map Enhancement (FreMEn) component, which models the probability fluctuation of the direction over time (see Figure 7). Vintr et al. (2019a) proposed to capture the temporal domain by combining FreMEn with continuous space model and analysed the impact of modelling the directions over time by comparing their approach with STeFMap, CLiFF-Map, and DGM.
FreMEn was introduced by Krajnik et al. (2014) and built upon the assumption that the real-world dynamics is governed by cyclo-stationary process (Gardner et al., 2006). That is, its statistical properties vary over time but they tend to repeat over fixed periods of time. FreMEn builds on this observation and through the use of the Fourier transform proposes a method to identify the dominant periodicities governing the cycle of the process and utilize them to predict future probabilities of environment states and changes.
5.4. Area – non-directional
5.4.1. Introduction
In contrast to trajectory and directional MoDs, non-directional MoDs focus on building models describing not the motion itself but rather the results of it. This includes characteristics such as crowd density (Vintr et al., 2019b), probability of a given area being occupied (Krajník et al., 2015), and average time to the state change (Rosen et al., 2016).
As shown in Figure 3, non-directional maps focus on the subgroups of sparse dynamics. In the case of semi-static objects, the focus is put on retaining information about the possible observed configurations of the environment. In this way, they are similar to dynamic maps, whose main objective is to quickly adapt to the observed changes in the environment. That said, non-directional MoDs do not strive for the most up-to-date map but rather retaining the knowledge about the past to enable future and current state estimation.
Furthermore, non-directional MoDs for active objects attempt to retain statistics describing the possibility of interaction with it (Bore et al., 2019).
Furthermore, in contrast to directional maps, the non-directional ones do not attempt to model the motion itself. Both directional and non-directional maps of the same environment play a complementary role and provide information about different aspects of the dynamics.
Finally, we would like to emphasize that most specific models in the literature belong to the area-non-directional group. Thus, we are discussing them jointly in this section.
5.4.2. Specific models
The common denominator of specific models is that data are stored and presented as is without an attempt to provide any kind of generalizing model. That said, data are not always stored in full, but they undergo a process of selection and grouping.
5.4.2.1. Complete
The key example of storing a complete history of observations is the work by Mitsou and Tzafestas (2007). The proposed representation hinges on the idea that storing the complete history of observations will improve the robot’s perception, especially the differentiation between static, semi-static, and active objects. The improvement comes from the fact that complete observations allow for building a time series enabling accurate classification of the object’s dynamics.
The idea of storing a complete history of past states of the environment has a substantial drawback: in contrast to previously mentioned methods, space complexity does not depend on the size of the environment but on the duration of the robot’s mission. That means it will require an ever-increasing amount of storage space. Furthermore, querying such a large data set will become inefficient with time, thus affecting the robot’s performance.
5.4.2.2. Time scaled
Time-scaled MoDs retain information about the most recent environmental observations given the timescale. They are at the border between maps of dynamics and dynamic maps. The dynamic map aspect is that time-scaled maps are designed to be rapidly updated, yet robust to changes caused by semi-static and active objects. The fact that they can distinguish between different classes of moving objects allows us to use them to anticipate the future state of the environment and filter out the information about active objects, yet retaining the information about the possible existence of semi-static objects.
One of the earliest approaches leveraging this idea is Temporal Occupancy Grid (TOG) proposed by Arbuckle et al. (2002). TOG extends the idea of Occupancy Grid (OG) as proposed by Moravec and Elfes (1985). The key idea behind TOG is that objects moving at different speeds can be observed in a cell during different timescales. That can be directly converted into a probability of a cell being occupied over different time intervals – timescales at a given point in time. The authors suggest three timescales of 1, 15, and 60 s. Each timescale corresponds to a different speed of a moving object. That means that fast-moving objects will have a high probability of occupancy on the 1 s timescale but substantially lower on the 15 s and 60 s timescales. This allows classifying the space according to the type of activity taking place in a given area as well as recognizing static parts of the environment (ones with a high probability of occupancy on all timescales).
5.4.2.3. Exemplar
The complete and time-scaled MoDs share the problem that the data is indiscriminately retained either in full or within a predefined timescale. That means all events (or lack thereof) have equal importance. However, informed selection of particular events will result in a limited memory use yet an expressive set of informative past environment configurations.
The earliest implementation of this idea is presented by Avots et al. (2002). In this work, the authors conduct simultaneous localization and state estimation of a set of binary random variables representing the state of the environment (i.e. doors). The work by Avots et al. (2002) stands on the verge between a dynamic map and a map of dynamics. Although the outcome of the algorithm is the estimated state of the environment, it also provides information about the transition model between the states for the random variable as well as it utilizes the information about the previous observation for improved state prediction. The authors propose a solution for this problem using a Rao-Blackwalised particle filter.
The work by Avots et al. (2002) focuses on modelling the state of the doors in the environment, although it does not cover the problem of their identification. The solution for door identification is proposed by Anguelov et al. (2004). In their work, the authors provide a very limited model of the environment dynamics (the opening angle of the doors), although, in contrast to a dynamic map, they explicitly identify and represent semi-static parts of the environment. Door identification is done by building an association between surface segments of a particular shape and colour with observed motion. The derived model therefore can predict if a given part of the environment is a door even if it was not being observed open.
The works by Anguelov et al. (2004) and Avots et al. (2002) have focused on explicitly modelling the dynamics of the door in an indoor environment. Although the problem of door modelling is without a doubt important, there is a multitude of semi-static objects in the environment that should be accounted for in robots’ operation (i.e. trash cans, chairs, and advertisement stands). A more general solution to this problem is proposed by Burgard et al. (2007) and Stachniss and Burgard (2005). In these papers, the authors suggest that, instead of using an explicit model of doors, the robot should use a catalogue of sub-maps retaining information about semi-static configurations of map regions. The work further focuses on improved localization by using the sub-maps (see Figure 8). Example of three catalogues of sub-maps representing a semi-static environment (Burgard et al., 2007).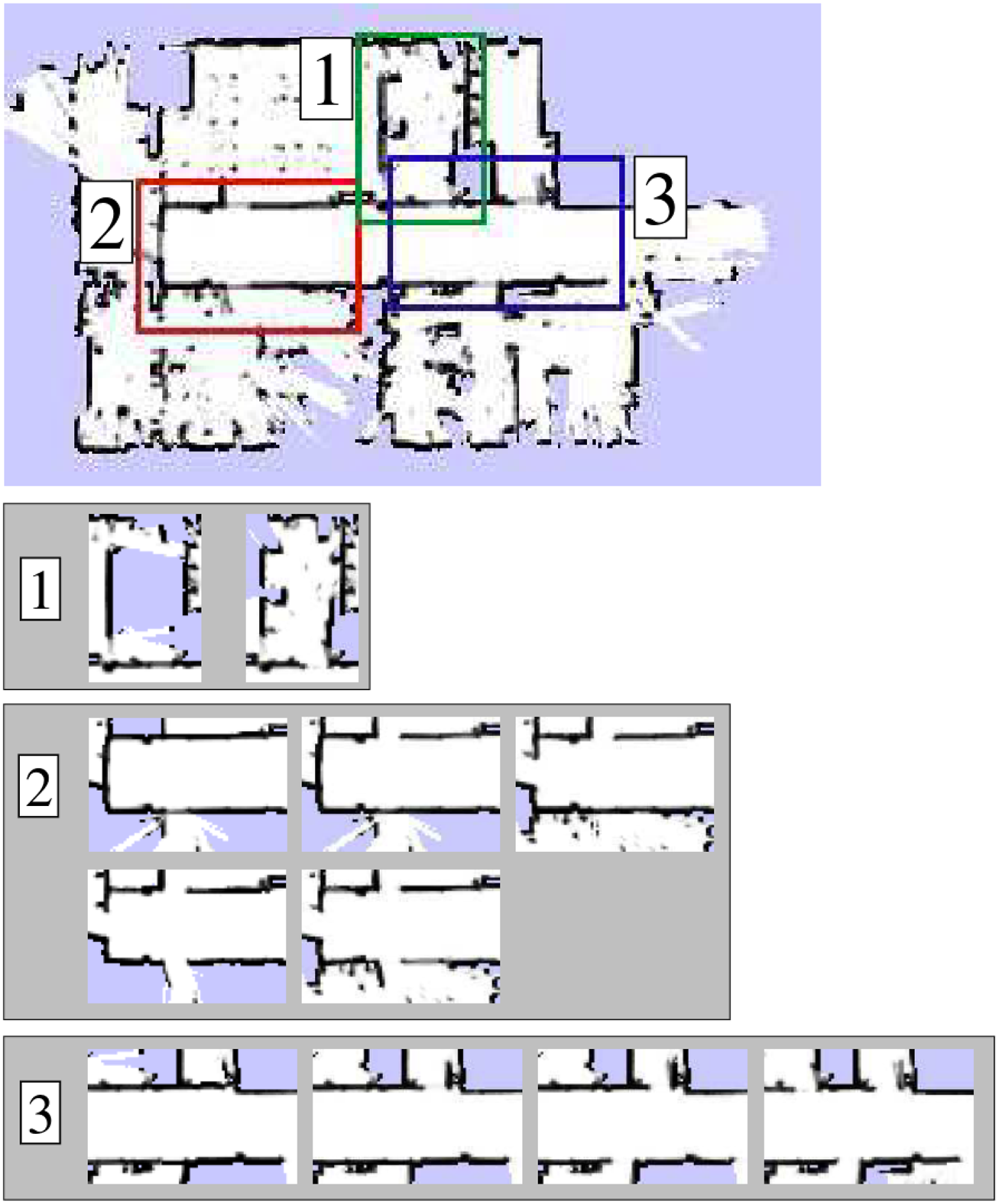
5.5. Generalizing
In the previous section, we discussed papers that are modelling dynamics by storing a complete or partial history of observations. Such methods subscribe to an observation that past states of the environment tend to repeat. Providing robots with past observations can help them improving localization and planning. That said, storing past observations has substantial limitations. In the works by Arbuckle et al. (2002) and Mitsou and Tzafestas (2007), the memory complexity is proportional to the time the robot operates. That means the algorithms are not directly applicable in the case of long-time operating robots.
One of the ways to mitigate the memory complexity problem is to identify and retain a subset of typical observations as proposed by Avots et al. (2002), Anguelov et al. (2004), Stachniss and Burgard (2005) and Burgard et al. (2007). However, such methods can only represent a limited set of possible configurations of the environment and do not provide any prediction capabilities.
One of the ways to mitigate these limitations is not to store the observations but rather to develop models that are capturing the regularities in the said observations. The models of the regularities allow for predicting the future states of the environment.
5.5.1. Event-based
One of the earliest approaches to address this problem was proposed in works coming from the University of Freiburg (Meyer-Delius et al., 2011, 2012; Tipaldi et al., 2011, 2012, 2013). These papers are built around the problem of localization in an environment with multiple semi-static objects (i.e. parking lots). All the presented papers build upon Hidden Markov Models (HMMs) and how to utilize them for improved localization. The authors propose to use a state transition probability to model how the occupancy state changes over time. They assume that changes in the environment are due to a stationary process, which does not depend on the absolute value of time. The state transition probability is estimated using Expectation-Maximization (EM). If a particular cell is not observed, the state transition probability can be used to predict the cell state. If no observations are made for a long period, a cell converges to a stationary distribution.
A similar approach was proposed by Saarinen et al. (2012). In this work, the authors utilize a Markov Chain to model the probability of state change. The key difference between these two approaches is that the work by Meyer-Delius et al. (2011) focuses on the prediction of the future state of the cell, while the work by Saarinen et al. (2012) is primarily focused on identifying the type of dynamics of a given cell.
Another Markov-based approach is proposed by Dadhich et al. (2015). In contrast to the previous works, Dadhich et al. (2015) explicitly focus on modelling the duration of the state with Explicit-state-Duration Hidden Markov Model (EDHMM). Compared to previously mentioned methods, an EDHMM map does not only consider what was the previous state of the cell but also how long the state has lasted.
The HMM based methods discussed so far focused on the probability of transition between occupied-free and vice versa. In contrast, Rapp et al. (2016) have developed a HMM that explicitly models the cell as dynamic or static, as well as the possible levels of uncertainty.
Another approach to model the changes in the occupancy between adjacent cells with the use of HMM was presented by Li et al. (2018). However, in contrast to previously presented methods, the work of Li et al. (2018) does not treat cells in separation from their neighbours but utilizes Markov Random Field (MRF). The MRF models the interaction between the adjacent cells, in a similar way as IOHMM (Wang et al., 2015).
The key difference is that Li et al. (2018) do not model the direction of the motion explicitly. The works presented so far in this section focused on modelling the dynamics in the metric space. However, this is not the only way to tackle this problem. In their work, Nardi and Stachniss (2020) present an approach where dynamics is represented through topological representation (Figure 9). Example of different configurations of environments and corresponding traversability graph (Nardi and Stachniss, 2020).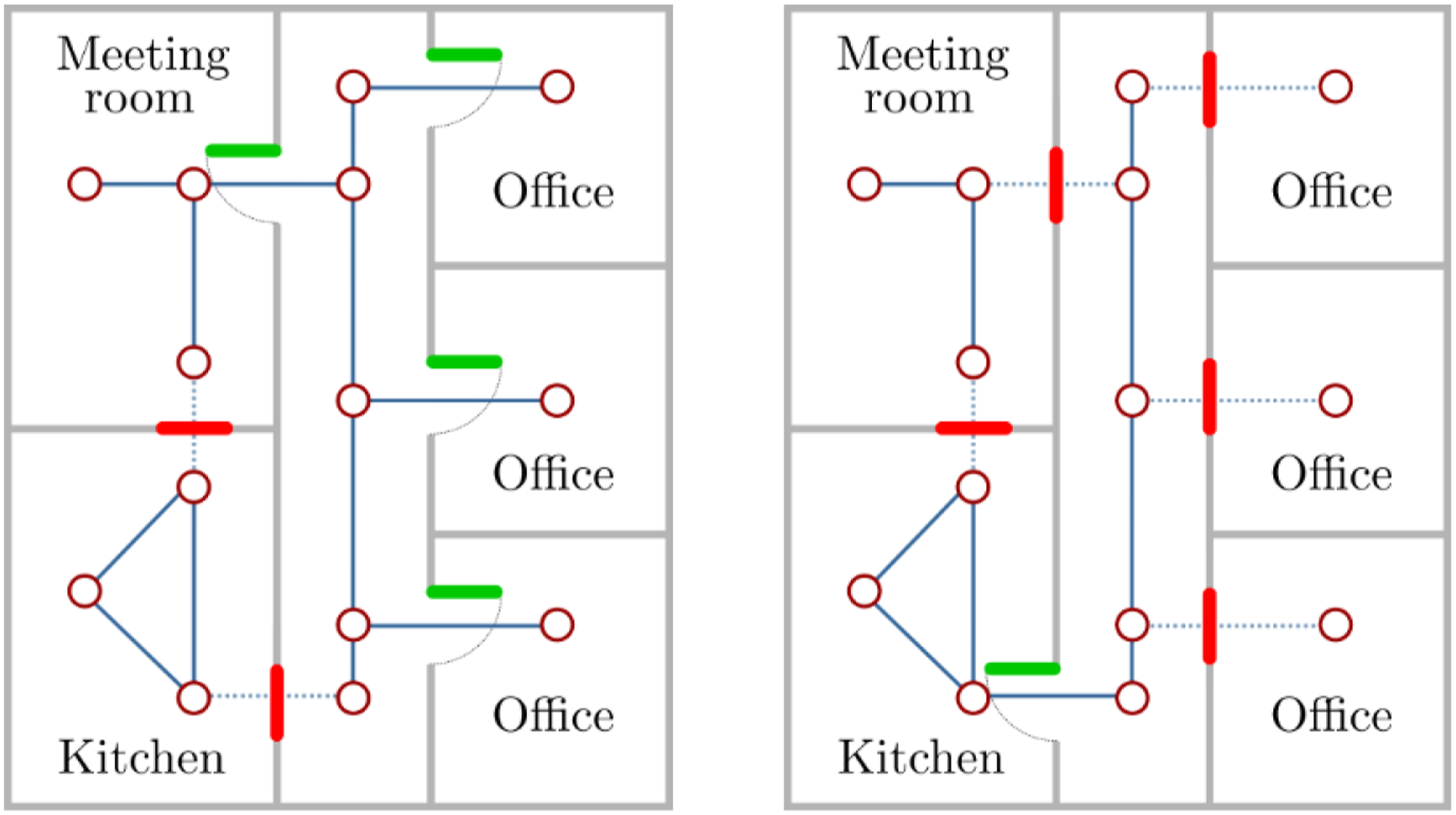
The works discussed so far in this section focus on modelling dynamics as a function of space. However, this is not the only way to model spatial patterns of dynamics: another line of research was developed, where instead of storing a history of past states of the environment, the model focuses on capturing the possible positions of typical entities in the environment and modelling the distribution over their possible locations.
One of the earliest contributions in this area is the work by Biswas et al. (2002). Here the authors focus on enabling robots to build representation for all semi-static objects within the environment with Robot Object Mapping Algorithm (ROMA). The key idea of ROMA is that semi-static objects will tend to reappear in the environment during the robot’s operation. Thus, it is possible to build a refined model of each object and identify it in subsequent observations. In the initial step, Biswas et al. (2002) identify map patches corresponding to moving objects by using a simple map difference algorithm. Then they use EM algorithm to build associations between the obtained snapshots and after that build a detailed model of a semi-static object. Although the presented work does not model the dynamics explicitly, it provides an important step in the process of building object maps. Later in the same year, the work of Biswas et al. (2002) was extended by Anguelov et al. (2002). In contrast to the previous work, Anguelov et al. (2002) introduce a hierarchical approach to object modelling.
After over a decade, Biswas and Veloso (2015) have revisited the idea of mapping movable objects within the environment. However, in this paper, the authors focus not only on identifying instances of this same object but also on tracking its historical observations of it. A more recent publication (Gomez et al., 2020) presents a graph-based method for storing information about the position of semi-static objects. Gomez et al. (2020) propose to build a tree in which leaves retain the information about the possible position of a semi-static object in a given configuration.
5.5.2. Temporal
The key limitation of the previously described methods is their Markovian nature. That means they only focus on the most recent state of the past and are not well suited for capturing complex temporal patterns. A solution for that limitation - FreMEn - was proposed in a series of papers by Krajnik et al. (2014, 2016, 2017). FreMEn builds on the idea that some mid- to long-term processes that cause the environment changes are periodic, and therefore can be represented in a frequency domain. To achieve this, FreMEn uses a Fourier transform tool that decomposes functions depending on space or time into functions depending on spatial or temporal frequency. FreMEn computes the dominant frequencies describing the state changes of a binary random variable and further uses it as a tool to estimate the probability of state changes in the future. FreMEn is thus capable to account for long-lasting or low-frequency state changes of occupancy or door state.
However, the work presented by Krajnik et al. (2014) is suffering from two limitations: FreMEn is designed to model only binary random variables and assume spatial independence of components. These limitations are addressed by work presented in Krajnik et al. (2019) and Vintr et al. (2019a, 2019b). In these papers, the authors propose a multidimensional warped representation, capturing spatio-temporal relations between the observations. Furthermore, the proposed method is flexible enough to arbitrarily increase its complexity to adequately represent all the periodicities present in the data.
6. Applications of MoDs
The table presents what types of data are represented by what types of maps. It is important to emphasize that the table reflects the published work not the possibility of combinations. The detailed classification of the papers can be found in Appendix A and B.
The recognized five fields are: 1. Motion prediction – where information about trajectories supports the quality of motion prediction by including information about past trajectories. 2. Localization – where the information about the possible environment configurations supports the improved pose estimation in presence of semi-static objects. 3. Motion planning – where information about dynamics allows the robot to follow socially acceptable trajectories. 4. Robot olfaction – where information about the airflow contributes to improved estimation of the shape of the gas plume. 5. Task planning – where information about the dynamics allows to anticipate potential interruptions and account for them.
Level of application of different types of MoDs.
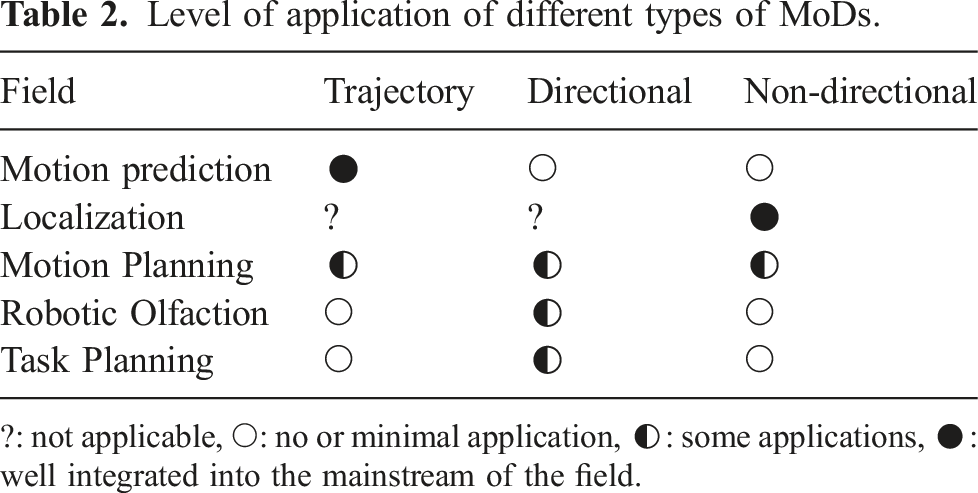
?: not applicable, ○: no or minimal application, ◐: some applications, ●: well integrated into the mainstream of the field.
In the three remaining fields (motion planning, robotic olfaction, and task planning), information about dynamics has not yet received widespread attention but the existing contributions are very promising.
6.1. Motion prediction
The core idea behind the motion prediction is that the uncontrolled agents are not following random paths but rather adhere to some kind of rules regulating their motions. Said rules can either be directly encoded based on expert knowledge, as proposed by Helbing and Molnar (1995), or learned from observations, that is, using MoDs.
6.1.1. Trajectory maps
In the domain of human motion prediction, the key focus was on exploiting trajectory clustering methods. In Han et al. (2019), the authors propose a pedestrian motion model that uses an iterative clustering algorithm with (i) Dirichlet Process Gaussian Processes to cluster trajectories into continuous motion patterns, and (ii) hypothesis testing to identify discrete transitions in the data, called transition points. Further, Carvalho et al. (2019) employ a map of the space shared by humans and robots and translate the motion of groups of human paths into vector fields on that map. Their method relies on extracting dynamics from the paths and they compare the performance of their method with the Gaussian Mixture Model (see Figure 10). Moreover, Sung et al. (2012) propose a trajectory clustering algorithm for extracting motion patterns from trajectory data and its effectiveness was demonstrated over the more common clustering approach of using k-means. The latter algorithm involves the following four steps: (i) line simplification, (ii) k lines projection, (iii) Interval clustering, and (iv) calculation of representatives. Choi and Hebert (2006) propose to learn object movement in an open environment. The proposed approach exploits the similarities of short-term movement behaviours by modelling a trajectory as a concatenation of short segments. These short segments are assumed to be noisy realizations of latent segments. The transitions between the underlying latent segments are assumed to follow a Markov model. Example of use path homology clusters, representing typical motion patterns for improved long-term motion prediction (Carvalho et al., 2019).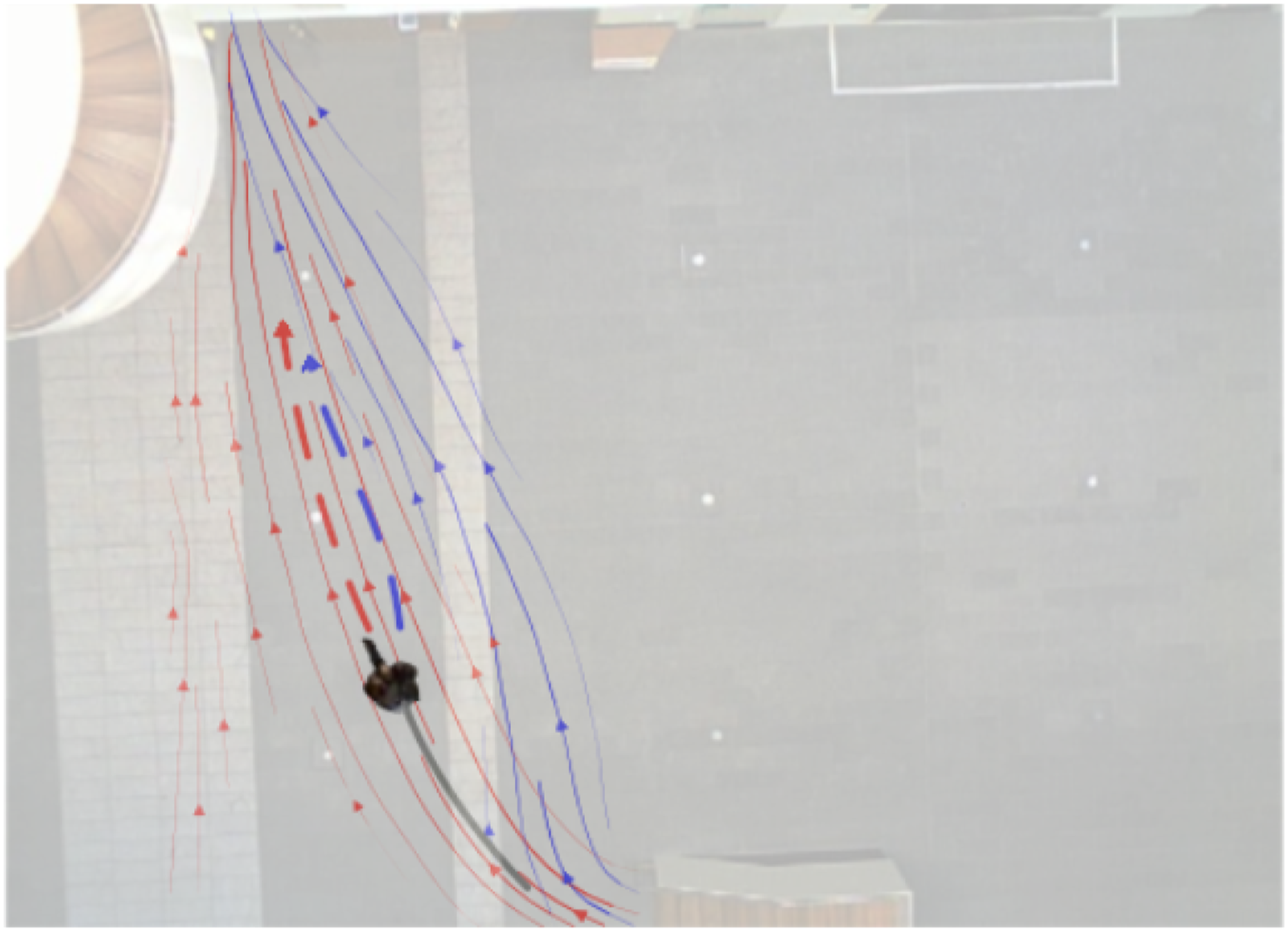
Another way to anticipate human behaviour within the environment is to predict the behaviour of a crowd as a whole instead of focusing on individual agents. This concept is summarized in the work by Ijaz et al. (2015), where the authors assess the key works in hybrid techniques for crowd modelling and simulation. In Nascimento et al. (2011), instead, the authors propose a new approach for modelling trajectories, based on a mixture of parametric motion vector fields that depend on a small number of parameters. Switching among these fields follows a probabilistic mechanism, characterized by a field of stochastic matrices.
6.1.2. Directional maps
The idea of utilization of directional maps for motion prediction has received attention only in recent years. In Habibi et al. (2018), the authors propose a context-based approach for pedestrian motion prediction in crowded, urban intersections. They incorporated semantic features from the environment (relative distance to curbside and status of pedestrian traffic lights) in the GP formulation for more accurate predictions of pedestrian trajectories over the same timescale. Apart from well-established motion prediction algorithms, also other approaches have been developed over time. One such approach utilizing the flow field is the work by Senanayake et al. (2020). In this work, the authors estimate the distribution of future agent states using a flow map. Another work utilizing information about the flow of people is the work by Kiss et al. (2021). However, in this case, the underlying representation is unimodal and the aim is to predict not the position of individual agents but local crowd density and its average direction. This still, of course, falls within the scope of MoDs. In fact, Kiss et al. (2021) is of particular interest as it is based on deep learning, in contrast to most other present MoD representations. Spatial relationships between features are captured by Convolutional Neural Network (CNN) blocks, and temporal relationships are captured by Recurrent Neural Network (RNN) blocks. The output of the model is a sequence of predictions of people densities (for a given map resolution) at future time steps.
For readers interested in a complete overview of the field of motion prediction we advise reading the work of Rudenko et al. (2020).
6.2. Localization
One of the oldest domains where the importance of a spatial representation of dynamics was recognized is localization. Already, Leonard et al. (1990) pointed out that the quality of the map can be affected by spurious information, which in the long run will substantially affect the quality of localization. The first approach was to differentiate measurements coming from moving objects from measurements of static objects and build the map using only the latter (i.e. Hähnel et al. (2003)).
The development of such a paradigm resulted in a substantial improvement in the quality of map building and also improved the robustness of localization algorithms. However, approaches removing measurements of semi-static and active objects are only successful in environments where there are enough permanent landmarks. In environments with a small number of static objects but with multiple semi-static objects whose presence significantly changes the environments’ configuration, they tend to fail. One type of such environment is a parking lot. In their work, Tipaldi et al. (2012) presented how the information about the possible locations of semi-static objects can improve the quality of localization in such a challenging environment. In recent years this idea was further expanded by Adkins et al. (2022), but in contrast to previously mentioned work by Tipaldi et al. (2012), the authors introduce the concept of probabilistic object maps, which includes dynamics model per object class; thus enabling improved localization quality (see Figure 11). Example of improved localization performance on a parking lot with presence of semi-static objects with known patterns of dynamics (Adkins et al., 2022).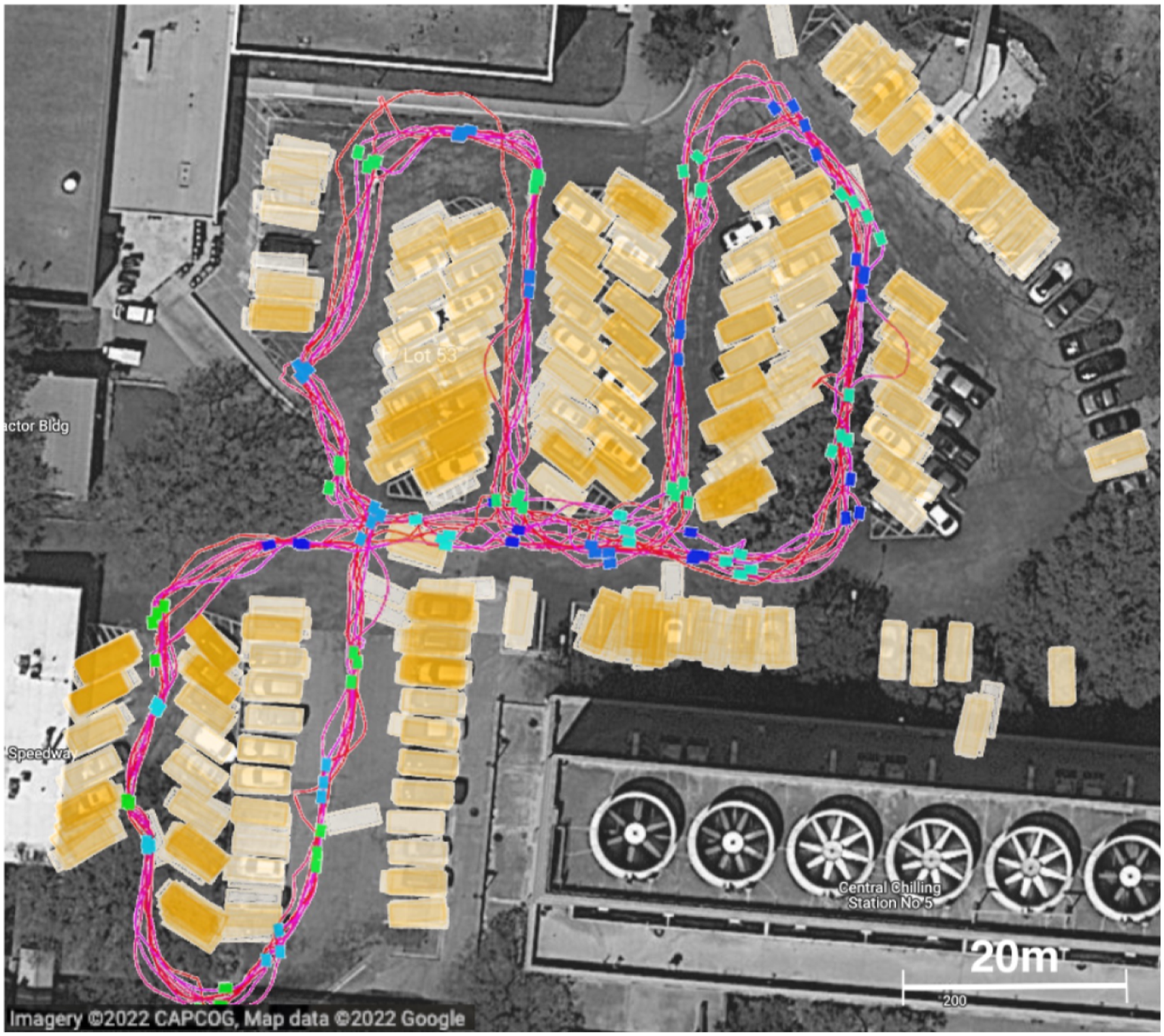
One of the fundamental ideas in improving localization in a dynamic environment is to retain information about the past semi-stable configurations of the environment. Arbuckle et al. (2002) introduced a method to represent dynamics through multi-timescale maps. The core idea is to build an occupancy map for a given timescale. In consequence, the obtained representation reflects the stability of map features. Similarly, Biber and Duckett (2005) explicitly represent dynamics through multi-timescale maps. In this time-scaled representation, the authors show that retention of a subset of past observations results in improved localization. A similar approach to reusing information about the environment’s past configurations was presented by Mitsou and Tzafestas (2007). In recent years, we can observe a further development of similar methods; for example Zhao et al. (2021). In this work, the authors approach the problem of localization similarly to Biber and Duckett (2005), but with a focus on decreasing the computational complexity.
In contrast to previously mentioned approaches that treat the whole environment as dynamic, there is a family of methods that identifies parts of the environment as semi-static and model their state change. Avots et al. (2002) present an approach where the localization quality is improved by estimating the posterior of the binary random variable describing the current state of the doors (open or closed). Burgard et al. (2007) likewise, learn and maintain discrete configurations and use it for improved localization. On the other hand, Burgard et al. (2007) do not store indiscriminately past observations but rather focuses on retaining permanent patch maps, which represent reoccurring semi-static configurations of the environment. Nielsen and Hendeby (2022) propose a feature-based multi-hypothesis map representation to be used for scenarios where identifiable landmarks change between discrete configurations (e.g. landmarks that can change location or open/closed doors).
Another idea for improving localization in dynamic environments is to retain two maps, one containing the static objects and the other dynamics. An example of such representation was proposed by Wolf and Sukhatme, (2005).
The idea of building models describing the possible discrete states of semi-static objects substantially improved the quality of localization. However, the ideas presented by Avots et al. (2002) and Burgard et al. (2007) are very limiting and focus only on such objects that are bound to a particular location and be in one of few states. In contrast, Gomez et al. (2020) propose a representation, where the semi-static objects can move to arbitrary locations according to a continuous probability distribution.
Another approach to store information about the changes in the environment for improved localization is proposed by Meyer-Delius et al. (2011). In this work, the authors propose to expand OGM to store the probability of measurement caused by semi-static objects. This approach allows estimating the observation likelihood while accounting for the changes in the environment.
Although the specific complete maps can provide substantial improvement in the quality of localization, they either suffer from large memory consumption or can store only a limited amount of possible space configurations. To address this problem in the context of localization, Tipaldi et al. (2011) have presented a way to estimate the current state of the environment while simultaneously improving the quality of localization. The key idea is that the map retains not only information about the permanently free or occupied cells but also which cells are likely to be occupied. This additional information allows the localization system to not only assess the pose estimate concerning the static map but also estimate its likelihood concerning the possible configurations. This, in consequence, leads to the refinement of pose estimates, especially in environments with a large number of semi-static obstacles.
6.3. Motion planning
In our work, we are considering the problem of motion planning as an extension of the classical piano movers’ problem (Schwartz and Sharir, 1983), which includes not only the basic formulation (Latombe, 2012), but also includes the uncertainties, differential constraints, modelling errors, and optimality (LaValle, 2006). It is important to emphasize that contrary to LaValle (2006), we consider determining how to move respecting the mechanical and kinodynamic limitations of the robot as part of the motion planning problem.
The problem of MoDs-aware motion planning can be categorized according to one of two distinct taxonomies. The first one is the object-based taxonomy, the second one is the model-based taxonomy.
The object-based taxonomy distinguishes the methods per the dynamic aspect of the environment: discrete objects versus continuous media. This categorization is motivated by the fact that motion planning in continuous media is oriented towards energy efficiency, while motion planning around discrete objects is focused on safety.
The model-based taxonomy distinguishes the methods per the type of information provided to the planner: generalizing models, and non-statistical models. Considering that in different circumstances dynamics of continuous media and discrete objects can use this same representation, in this section we will follow this latter classification.
6.3.1. Motion planning on generalizing models
These types of motion planners account for dynamics in the context of probability distributions.
One of the earliest works where motion planning on generalizing models was by Kruse et al. (1997). In this work, the authors introduce the concept of stochastic trajectories, which allow the system to anticipate the future position of active objects. That allows the motion planning system to avoid possible collisions. Similarly, Bennewitz et al. (2005) propose the use of HMMs to learn trajectories of human motions. The learned patterns are used to predict the movement of detected persons. The probability of a location being occupied by a detected person is used in the A* algorithm for planning robot paths. A similar approach is proposed by Fulgenzi et al. (2008). Here, the moving obstacles are modelled using Gaussian Processes and sampling is biased using the probability of collision of a particular path with the obstacles. The CLiFF-RRT* algorithm by Palmieri et al. (2017), is a modified RRT* algorithm that uses CLiFF-maps in addition to occupancy grids (see Figure 12). In particular, the cost function used is a modified upstream criterion similar to the one used by Ko et al. (2014). A similar approach is proposed by Swaminathan et al. (2018). However in contrast to Palmieri et al. (2017), in this work, the authors do not utilize a deterministic motion planner to bias the sampling, but they directly apply RRT*. Impact of maps of dynamics in a complex dynamic environment. Here, we can see that the global plan is following the path of least disturbance even before starting the robot’s mission (Palmieri et al., 2017).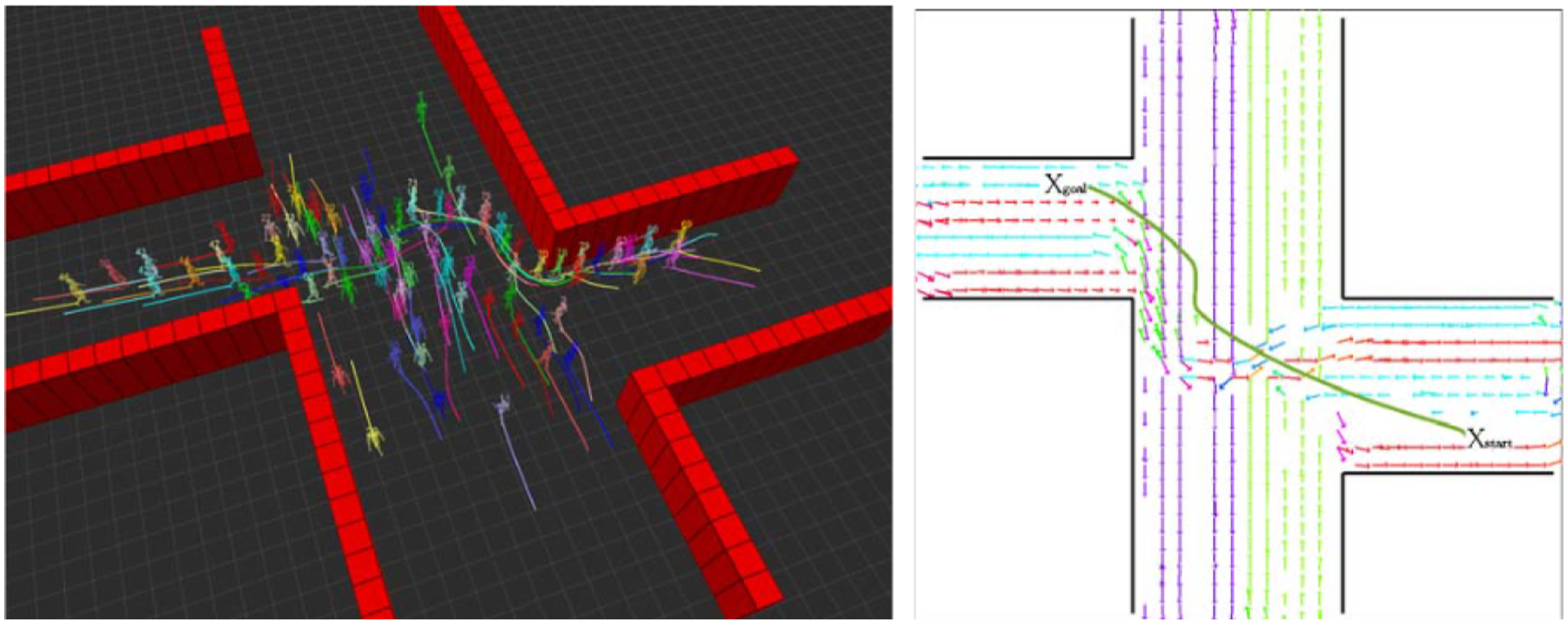
6.3.2. Motion planning on vector fields
In the previous section, we have introduced methods that utilize generalizing models, which provide information about the dynamics primarily through probabilistic models. However, this is not the only way information about dynamics has been included in motion planning. There is a long history of dynamic-aware motion planners who instead of utilizing probabilistic models, utilize vector fields. Such approaches, although not directly utilizing MoDs, provide important insights into how to incorporate information about dynamics into the planning process.
This category primarily includes navigation of aerial or surface vehicles (Al-Sabban et al., 2013; Chakrabarty and Langelaan, 2013; Ko et al., 2014; Lolla et al., 2012; McGee et al., 2005). The common denominator of these works is their focus on building optimal trajectories in vector fields, representing the flow of continuous media. That said, the criterium of optimality change depending on the context.
McGee et al. (2005) discuss the problem of finding an optimal time path in the presence of constant wind. In this work, the authors assume a known constant wind velocity vector, that can be directly included in the optimization process.
Petres et al. (2007) on the other hand consider the problem of motion planning under directional constraints caused by smooth fields of force like underwater currents. In this work, the authors utilize an anisotropic Fast Marching algorithm (Philippsen and Siegwart, 2005).
Lolla et al. (2012) present a solution for solving the motion planning problem for a swarm of autonomous vessels in the varying flow field. In this particular work, path optimality is defined as the shortest time path. The authors propose the use of the level set method, to combine the time-dependent flow advection with the nominal vehicle motion and then obtain the optimal path by solving the particle tracking equation back in time.
The problem of wind flow-aware motion planning is at the centre of focus of researchers addressing the problem of autonomous aircrafts both powered and unpowered.
The problem of motion planning in varying complex wind fields was also addressed by Chakrabarty and Langelaan (2013). In this work, the authors are purely focused on soaring aircraft, where the source of propulsion is coming from the wind field itself. A similar problem was addressed by Al-Sabban et al. (2013).
Furthermore, Ko et al. (2014) introduce an upstream criterion that in combination with RRT* algorithm enables the planner to build flow-compliant trajectories. The motivation for this is that adhering to the directions of the vector field lowers the control effort.
Another approach to the problem of planning in vector fields is presented by Kularatne et al. (2016). In contrast to the previously mentioned works here the authors use a graph-search-based optimization technique to plan energy-efficient paths.
Recently three comparison papers have been published in this field. In their work, Swaminathan et al. (2022) and Vintr et al. (2020), analyse the impact of MoDs on motion planning. The core idea behind this work is to measure if the information stored in MoDs, when used during global motion planning will positively impact the robot’s performance. In Vintr et al. (2020), the authors measure the relative ability to predict a number of encounters with humans for a given moment in time. The results show that the MoDs can lower this number.
Two years later, Vintr et al. (2022) proposed a new revised version of the previous paper with an improved quality criterion, called the service disturbance function, which is a generalized version of the previously introduced expected encounter criterion.
Another approach to the problem of MoDs impact on motion planning presented (Swaminathan et al., 2022). In this work, the authors focused on the time the robot wastes while yielding to people. The conclusion was similar to the previous one, that time wasted by the robot decreases when the global motion planner has access to information stored in MoDs.
6.4. Robotic olfaction
Robotic olfaction addresses the issues related to the application of machine olfaction for (i) gas source localization including plume tracking, and (ii) gas distribution mapping covering also gas tomography, with the use of actuated platforms. Because of their volatile nature, gases are affected by the environment’s dynamics, especially airflow. That said, the use of MoDs is very limited within the field. The information regarding the airflow is primarily included either implicitly (the gas concentration measurements carry information regarding the airflow) or only locally (the wind measurements are obtained in the same location as the in-situ gas concentration measurements). That said, there is also a small subset of methods that included information regarding the wind field. However, such methods very often operate under the assumption that the wind field is constant.
Despite this, within the Mobile Robot Olfaction (MRO) community exists a well-recognized need for adequate Air Flow Models (AFMs). In their work, Bennetts et al. (2017) point out that the core of AFM research focuses on the development of macro- (distances up to 5000 km) and mesoscale (distances up to 2000 km) models. Such models, although impactful do not apply to typical robotic missions, which usually tend to take place in areas below 2 km distance (micro-scale). The key difference between the macro-, meso-, and micro-scale environments is the impact of the turbulence on the airflow, which is substantially higher in the later type.
That said, we can expect the increased impact of airflow models on the field of robotic olfaction, following the well-established trend of use of macro- and mesoscale models for air pollution modelling (Arain et al., 2007; Mathur and Peters, 1990). We believe that the adoption of such approaches will find its place in the field of robotic olfaction thanks to the recent advancements in data-driven turbulence modelling (Zhang and Duraisamy, 2015).
However, despite this need, the use of global airflow models is virtually non-existent in the field of robotic olfaction. Instead, different groups of methods are either developed under strong assumptions regarding the wind conditions or incorporate the wind measurements locally.
In their survey, Jing et al. (2021) propose to split gas source localization methods into four groups: (i) reactive, (ii) heuristic search, (iii) probabilistic inference, (iv) learning. They also present a detailed analysis of each of the groups.
The picture presented by Jing et al. (2021) shows that the information about the airflow has only limited application for solving the problem of gas source localization. It is caused by the fact that the core of the methods is still relying on bioinspired algorithms, which assume a constant wind field (Hernandez et al., 2012). That said, in recent years, we can observe the development of frameworks that can accommodate information about airflow (Wiedemann, 2020).
6.5. Task planning
So far we have focused on the problem of motion planning, which is limited to finding a path or trajectory to move from one location to another while considering the kinodynamic constraints of the robot platform and the geometric ones of the environment. For synthesizing complex robot behaviours, that is, not only computing a path that connects two locations but rather combining several types of macro-actions (e.g. navigating to a place, re-charging battery, picking of a package), there is still a need to address the problem of high-level planning, which is ‘the task of finding a sequence of actions to accomplish a goal’ (Russell and Norvig, 2020).
Considering that the real world is constantly undergoing dynamic changes, the robots must plan their actions accordingly. The importance of this problem is shown through the fact that their book (Ghallab et al., 2016) dedicates three separate chapters to the problem of planning with temporal, nondeterministic, and probabilistic models. Each of the chapters approaches the problem of planning in a dynamically changing uncertain world differently. The importance of information about environmental uncertainty and dynamics for successful planning opens a new research direction for the mapping community. Although there is still very little work addressing the use of MoDs in the context of planning. The existing contribution can be divided into two classes: (i) planning for MoDs and (ii) planning with MoDs.
6.5.1. Planning for maps of dynamics
As we have already pointed out, problems related to map building are intensively explored for over 30 years. However, in most of the cases, the works are relying on the static world assumption (Lluvia et al., 2021). Solving the map-building problem implies the robot does not have to revisit explored parts of the environment and the time when the data was collected does not affect its quality. In the rare cases when the exploration algorithms are not developed under the static world assumption, the key focus is to mitigate the impact of measurements associated with moving objects on the final map (Lluvia et al., 2021).
In recent years, we can observe the development of algorithms that explicitly address the problem of acquiring data for MoDs. The common denominator of these algorithms is the fact that, when planning for the next measurement position, they not only consider the spatial dimension but also the temporal aspect of the data. In contrast to the more popular exploration algorithms, algorithms tailored for MoDs have to account for two additional challenges. First, the bigger search space, which is not only bound to the spatial dimensions, but also includes a temporal dimension, and as such follows different rules.
Second, the proposed methods have to incorporate the solution for the balance between exploration and exploitation. Depending on the assumption regarding the nature of the underlying random process governing the dynamics in the environment (stationary, non-stationary, cyclo-stationary) only in the case of a stationary random process it is possible to completely build an MoD in time equal to the mapping of a static environment. In the case of a cyclo-stationary random process, the time necessary to acquire enough data is proportional to the period of the longest cycle, while in the case of a non-stationary process there is no way to predict the necessary time. Considering that it is desired to shorten the time necessary for the deployment, the robotic system will not have enough time to collect a sufficient amount of data. Thus, the exploration algorithms have to follow a policy where they can mix exploration and exploitation.
The initial body of work addressing the problem of data collection for MoDs is connected to the work of Krajnik et al. (2017). The key publications are Santos et al., 2015, 2017) and Kulich et al. (2016). All the listed publications attempt to address the problem of efficient data acquisition while streaking the balance between exploration and exploitation.
In more recent years, another work tackling the problem of spatio-temporal exploration was published by Molina et al. (2021). In this paper, the authors explore the problem of gathering observations for time-dependent flow map STeFMap (Molina et al., 2018).
6.5.2. Planning with maps of dynamics
In the previous section, we have discussed the algorithms that are developed to gather information necessary to successfully build MoDs. In this section, we discuss the algorithms that utilize the information about dynamics to improve the quality of generated plans. The information about dynamics can benefit the quality of the developed trajectories (Section 6.3) as well as solutions for task planning problems.
The common denominator of the discussed method is the concept that in changing the environment the plan can be only as good as the predictions regarding the future state of the environment.
The first group consists of methods which attempt to model the traversability information. In contrast to methods discussed in Section 6.3, these methods focus on modelling whether a given asset is reachable at the desired point in time (Haigh and Veloso, 1998; Nardi and Stachniss, 2020; Pulido et al., 2015). In most cases, it is a graph-based representation where the edges model doorways or other passages that can be obstructed by obstacles.
The second group focuses on human-aware planning. The problem of human-aware planning is to generate such a sequence of actions for a robot, taking into account the state of the environment and the goals of the robot, together with a set of forecasted possible plans of the human, such that the robot will not interfere with humans actions (Cirillo et al., 2009).
In their seminal work, Alami et al. (2006) propose an architecture for Human Aware Task Planner (HATP), which is decoupled from Human Aware Navigation Planner (HANP). The HATP has very limited access to the spatial representation of the environment, so it uses the location labels and their predicted state. In the cases when the planning problem requires more information about the shape of the environment and the usual activities (i.e. Tipaldi and Arras (2011)), the environment is modelled as an annotated topological graph representing semantically meaningful locations and connections between them, while the information about dynamics is stored as a schedule of each non-controllable agent in the environment. The use of this rudimentary representation builds on the assumption that the lower-level functionalities will handle the execution of the plan and tackle the possible problems caused by the environment’s dynamics.
That said, the algorithms solving the problem of high-level planning cannot always outsource the problems related to dynamics to the lower levels, as exemplified by the Multi Robot Task Allocation (MRTA) problem. In MRTA, the decision of which task should be executed by which agent can directly be affected by the dynamics in the environment. In their initial study, Surma et al. (2021) explore the idea that in the context of real-world robotic application, the dynamics and uncertainty about the environment cannot be solely handled by the low-level planning but should also be accounted for on the higher levels. In their work, they show that including information about the crowd density in densely populated environments can improve the solution for the MRTA problem.
7. Other fields
As we have pointed out in Section 1, the problem of building spatial and spatio-temporal models of dynamics is not only limited to robotics. Thus, one of our objectives is to indicate to the reader other relevant fields, where similar problems are being tackled and which contributions are relevant to robotic applications. In this section, we have focused on fields that in our opinion contain contributions with the potential to transfer to robotics.
7.1. Computational fluid dynamics
CFD is a branch of fluid mechanics that uses numerical analysis to analyse and solve problems that involve fluid flows. In their book, Wendt (2008) provide an intuitive definition of CFD as: ‘ […]the art of replacing the governing partial differential equations of fluid flow with numbers, and advancing these numbers in space and/or time to obtain a final numerical description of the complete flow field of interest’. Over the years CFD has provided solutions for many problems across different fields. Primarily providing tools to model and assess the impact of continuous media on moving bodies. However, the information about the flow carries much more information that can be utilized in different contexts. Considering the scope of this paper, we will focus on the utilization of CFD as MoDs in the context of aerial robots and robotic olfaction.
7.1.1. Impact on UAV
The impact of CFD in robotics is especially visible in the context of UAV design. That said, this is not the only area where CFD can benefit UAVs. Considering that UAVs are smaller, lighter, and slower than manned vehicles, they are more prone to the wind’s impact. In consequence, even though modern drones can fairly well handle themselves, it is not guaranteed that, in presence of wind, planned paths are energy efficient, shortest, or even safe (Akhtar et al., 2012). Thus, the information about the wind behaviour within the environment can substantially contribute to path quality.
The notion of the way wind impacts UAVs is not novel, and over time, methods have been developed addressing the problem of motion planning in wind fields (see Section 6.3.2). Yet these methods focus on fairly simple wind fields, not applicable in complex urban environments. Recently, Gianfelice et al. (2022) proposed a solution for predicting urban wind flow with CFD for complex urban environments. This recent advancement opens an interesting research direction, enabling dynamics-aware improved motion planning for UAVs.
7.1.2. Impact on MRO
As we have already pointed out in Section 6.4, the phenomenon of gas dispersion is heavily dependent on airflow. Modern algorithms tackling the problems related to gas source localization and gas mapping utilize this notion for improved performance. That said, the wind information is usually used locally and directly incorporated into the gas dispersion models. It is caused by the fact that, on the micro-scale, the impact of turbulences outweighs the impact of the laminar flow. Currently, existing solutions for the CFD are not well suited for modelling turbulent flow. Yet, the recent development in terms of modelling the local characteristics of turbulent airflow (Bennetts et al., 2017; Monroy et al., 2017b) in connection with the development of realistic gas dispersion simulators (Monroy et al., 2017a) outlines a research direction where CFD have the potential to substantially impact the field.
7.2. Computer vision
The research directions related to changes and dynamics have received and are still receiving a substantial amount of attention within the computer vision (CV) community. The research topics include, but are not limited to surveillance and anomaly detection (Acevedo-Rodríguez et al., 2011; Anjum and Cavallaro, 2008; Choong et al., 2014; KamaliArdakani et al., 2017; Liu et al., 2014b; Owens and Hunter, 2000; Piciarelli and Foresti, 2006; Piotto et al., 2009; Piciarelli et al., 2005; Rodríguez-Serrano and Singh, 2012; Santhosh et al., 2019; Siang and Wang Khor, 2012; Sun et al., 2017; Shu-Yun and Huang, 2010; Weiming et al., 2004, 2006; Zhouyu et al., 2005), activity recognition (Anjum and Cavallaro, 2007; Atev et al., 2006; Khan et al., 2016; Morris and Trivedi, 2011; Nawaz et al., 2014; Zhang et al., 2009), crowd analysis (Cheriyadat and Radke, 2008; Khan et al., 2016; Sharma and Guha, 2016; Zhou et al., 2011), and appearance change (Lowry et al., 2016).
Not all these research directions play an equally important role in the context of MoDs; thus, in the following, we will focus on the three fields presenting the highest intersection with MoDs, namely (i) anomaly detection, (ii) crowd monitoring, and (iii) trajectory clustering. It is important to emphasize that the cut between fields is very often arbitrary and contributions exist at the intersection of fields.
7.2.1. Anomaly detection
The core idea of anomaly detection in the context of computer vision is to develop models of normal data and then use them to identify observations that do not comply with said models (Yang et al., 2022). Most relevant applications of anomaly detection to MoDs are the detection of anomalous behaviour in the motion of people or vehicles, which have found successful applications in traffic and pedestrian surveillance. In these applications, a common approach is to build a model using high-level features (i.e. trajectories) and later use it to differentiate between typical behaviours and anomalies; a framework with many commonalities to MoDs like trajectory maps.
We suggest to readers interested in these problems should familiarize themselves with the survey by Ahmed et al. (2019).
7.2.2. Crowd analysis
Modelling the typical behaviour of active objects is also actively developed by researchers in the crowd analysis community. The readers especially interested in the topic should familiarize themselves with a survey paper by Bendali-Braham et al. (2021). As defined in the survey, methods for Crowd Scene Analysis are of utmost importance for the MoD community, in particular with regards to motion tracking and prediction.
Because of the nature of the problem, that is, identifying the current dominant motion patterns, motion tracking, and prediction algorithms are not well suited for building long-lasting maps of motion patterns. Instead, they focus on the extraction of instantaneous ones.
Ali and Shah (2008) present the application of floor fields for tracking. In this work, the authors propose the generation of three independent floor fields capturing the behaviour patterns caused by different aspects of the environment: a Static Floor Field describing the constant motion patterns in the environment caused by the attraction of some points in the environment; a Boundary Floor Field captures the impact of obstacles on the dynamic objects; and a Dynamic Floor Field captures the behaviour of a crowd around the tracked entity. They show that the combination of these three different floor fields improved the prediction capabilities of the tracking algorithm.
Another example is the work of Wu et al. (2017), where authors discuss the idea of extracting global motion patterns through curl and divergence and use them to classify the motion patterns and assign to them meaningful labels.
7.2.3. Trajectory clustering
The problem of understanding human behaviour has been addressed for many years in different contexts. The unprecedented acceleration in this field is a combination of granting general public access to Global Positioning System (GPS), mass reliance on handheld navigation devices, and intensive location data acquisition (Wang et al., 2021). That said, the resulting methodologies are not always directly applicable in the robotic context. The main limiting factor is the amount, type, and quality of the data required for these methods to work. In robotics, observations are often sparse, partial, noisy, and very local. To transfer the wealth of research conducted on trajectory clustering to robotic mapping, research on ways to cope with these limitations is paramount.
To the readers interested in the problem of trajectories clustering in the context of CV, we suggest familiarizing themselves with a recent survey by Ahmed et al. (2019). We suggest to focus especially on the taxonomy introduced by the authors, who split the existing body of work into partitional, hierarchical, density-based, model-based, and shrinkage-based.
7.2.4. Non-rigid structure from motion
Non-Rigid Structure from Motion (NRSfM) is another domain of CV that can provide methodologies applicable in the domain of MoDs. The key focus of NRSfM is recovering 3D non-rigid shape models from 2D image sequences recorded with a single camera.
Although some prominent solutions in the field (i.e. Bregler et al., 2000; Dai et al., 2012) are addressing the problem through factorization, they are not directly applicable. It is worth focusing our attention on works by Akhter et al. (2008) and Newcombe et al. (2015). The work by Newcombe et al. (2015) provides a method to estimate a 6D motion field, which is used to warp the estimated geometry into the live frame. The method introduces a volumetric warp field which represents a scene motion by 6D per-point transformation. The generalization of this method might lead to the development of efficient 3D MoD. Furthermore, Akhter et al. (2008) present another interesting approach to tackle the NRSfM problem. The authors posit that representing non-rigid structure as a combination of basis shapes is one of two ways of looking at the space-time structure induced by points seen across frames. Instead of a shape space representation, they propose looking across time, representing the time-varying structure of a non-rigid object as a linear combination of a set of basis trajectories. Here, we also expect that the generalization of the said method will lead to the development of efficient 3D MoDs.
7.3. Appearance change
As we have already pointed out a thorough overview of the methods coping with place recognition under appearance change can be found in a survey by Lowry et al. (2016), followed by a more recent survey by Zhang et al. (2021), that approaches the problem from the deep learning perspective. However, there are a few publications that are especially important in the context of the robotic application. Several works used past observations to build non-directional MoDs that can forecast the appearance of the environment. Dayoub and Duckett (2008) proposed map adaptation based on short- and long-term memory concepts, which modelled the persistence of the image features that constituted the maps used for vision-based localization. A similar effort was presented by Rosen et al. (2016), where the past observations were used to forecast map features’ persistence. Krajník et al. (2014) argue that the appearance of map features is affected by seasonal cycles and used the FreMEn concept to forecast the features’ visibility. The FreMEn MoDs was integrated into a vision-based navigation system that achieved autonomous operation despite drastic appearance changes (Halodová et al., 2019). The authors of Song et al. (2019) build feature-based MoDs using general time series analysis and demonstrated that this approach outperforms (Krajník et al., 2014).
8. Open research directions
In recent years, the field of MoDs is experiencing rapid development, as we have highlighted in Section 5. Furthermore, several fields are conducting intensive research on problems related to MoDs. That said, not all the problems are fully addressed and are still waiting for adequate development. In principle, the open research problems related to MoDs can be split into two groups: representation development and application development. In this section, we will follow this division to summarize the existing research problems.
8.1. Model development
8.1.1. Adoption
In Section 7, we have presented a bird’s eye view on the selection of fields addressing similar problems to MoD. These works, although interesting and important, are not investigated in the context of their applicability to the problems relevant for the MoD. Thus, one of the principal questions for the field should be:
8.1.2. Stationarity assumption
The key representations in the field assume that the random process governing dynamics is stationary or cyclo-stationary. That means the pattern of motion does not change over time or changes in a regular harmonic way. These are very limiting assumptions that do not reflect the reality of dynamics. Dynamics tend to change over time often in rapid ways. In consequence, the existing representations are not capable to adequately reflect the current patterns of dynamics. Thus, another unexplored research problem can be formulated:
8.1.3. Large data requirement
The currently existing MoDs require a substantial amount of observations to build reliable models, thus limiting the flexibility of the representation. This problem opens two possible research questions:
8.1.4. Dimensionality problem
The currently existing MoDs are primarily focusing on 2D representations, which limits their applicability. That said, the shift to 3D representations is not trivial and requires substantial research, which will tackle the increased memory complexity. Thus, opening a new research area:
8.2. Application
The problem of application of MoDs is much more area specific. Thus, it is much more challenging to formulate a concise list of open research questions. In Table 2, we have summarized the state of utilization of MoDs in five key application areas. Moreover, we have identified two critical development directions across the aforementioned application areas.
8.2.1. MoD-informed planning
As we have already pointed out, the problem of dynamic-aware planning is a well-established research problem approached from different directions. However, it is essential to emphasize that there is still a lack of methods utilizing the broader information provided by MoDs. In recent years, there has been some ongoing work in direction of dynamics-aware motion planning. Yet, dynamics-aware task planning is under-explored.
8.2.2. MoD-informed prediction
Similarly to planning, also dynamics-aware prediction has been addressed in some works. However, the potential benefits of MoDs are yet to be exploited. MoD-informed prediction is a broad topic that, among the others, includes long-term motion prediction and future motion pattern estimation. These two examples address many problems, such as human motion prediction, local airflow forecasting and global traffic prediction. That makes it applicable directly in the context of robotics and beyond.
9. Conclusions
In this paper, we have presented the current landscape of the field of MoDs. We have proposed a taxonomy as well as provided a survey of the field and concluded with a summary of the open research directions.
The general conclusion of the work is that even though the field is relatively young (the majority of the contributions were developed in the second decade of the XXI century), the existing contributions established a firm foundation for further development.
Nevertheless, there are still several open research directions that can stimulate the development of the field for the foreseeable future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The contribution of T. Krajník was funded by the Czech Ministry of Education by OP VVV funded project CZ.02.1.01/0.0/0.0/16 019/0000765 ‘Research Center for Informatics’. The contribution of M. Magnusson, A. J. Lilienthal, S. Mghames, L. Palmieri, M. Hanheide, N. Bellotto was funded by the European Union’s Horizon 2020 research and innovation programme under grant agreement No 101017274 (DARKO). The contribution of F. Verdoja was funded by Business Finland, decision 9249/31/2021.
Notes
Appendix A. Publications
A classification of papers discussed in the survey. The following abbreviations are used in the table (Generalizing) Time Agnostic ((G)TA), (Generalizing) Event Based ((G)EB), (Generalizing) Temporal ((G)T), (Specific) Time Scaled ((S)TS), (Specific) Exemplar ((S)E), (Specific) Complete ((S)C), Trajectory (T), Non-Directional (ND), Directional (D).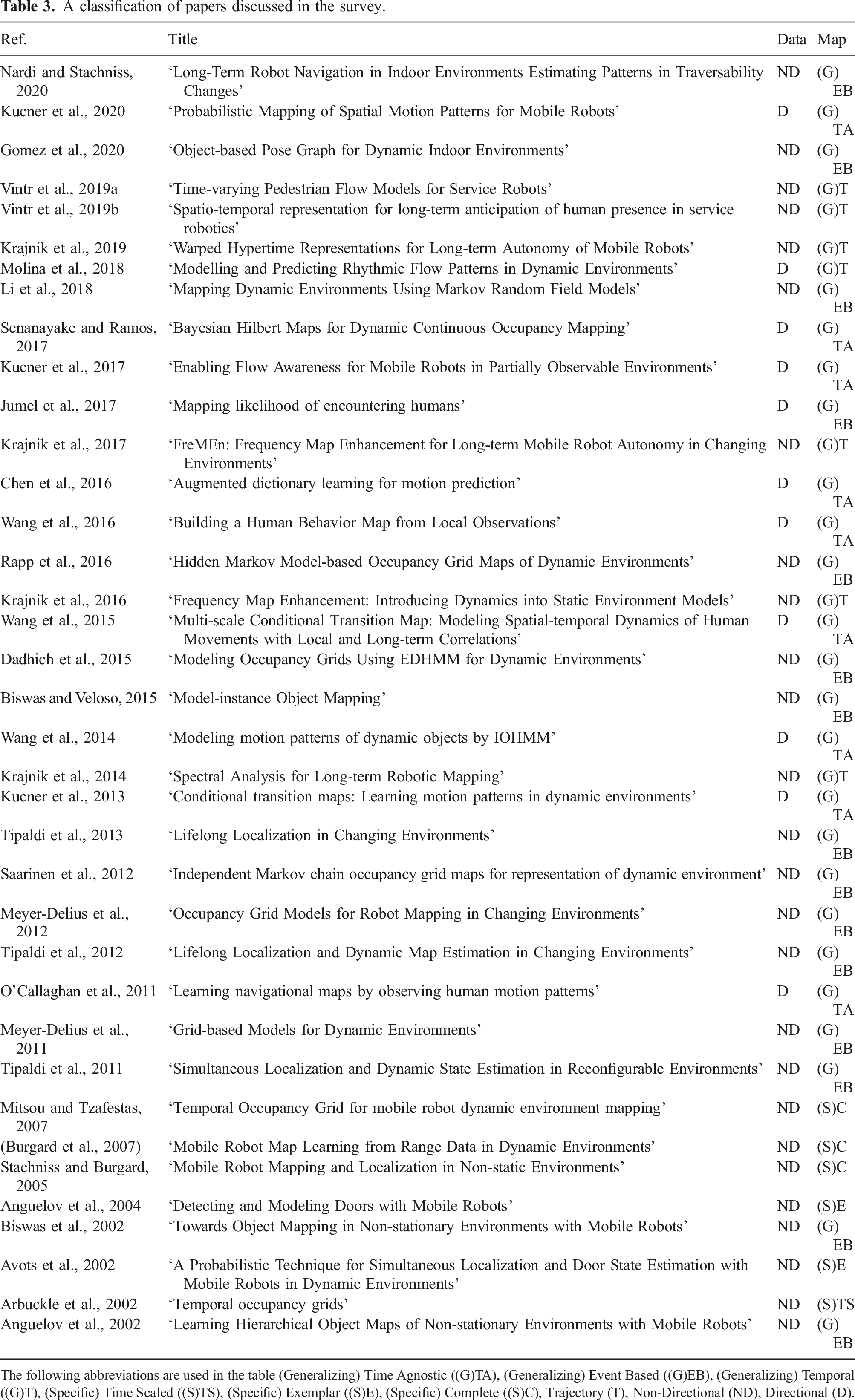
Ref.
Title
Data
Map
Nardi and Stachniss, 2020
‘Long-Term Robot Navigation in Indoor Environments Estimating Patterns in Traversability Changes’
ND
(G)EB
Kucner et al., 2020
‘Probabilistic Mapping of Spatial Motion Patterns for Mobile Robots’
D
(G)TA
Gomez et al., 2020
‘Object-based Pose Graph for Dynamic Indoor Environments’
ND
(G)EB
Vintr et al., 2019a
‘Time-varying Pedestrian Flow Models for Service Robots’
ND
(G)T
Vintr et al., 2019b
‘Spatio-temporal representation for long-term anticipation of human presence in service robotics’
ND
(G)T
Krajnik et al., 2019
‘Warped Hypertime Representations for Long-term Autonomy of Mobile Robots’
ND
(G)T
Molina et al., 2018
‘Modelling and Predicting Rhythmic Flow Patterns in Dynamic Environments’
D
(G)T
Li et al., 2018
‘Mapping Dynamic Environments Using Markov Random Field Models’
ND
(G)EB
Senanayake and Ramos, 2017
‘Bayesian Hilbert Maps for Dynamic Continuous Occupancy Mapping’
D
(G)TA
Kucner et al., 2017
‘Enabling Flow Awareness for Mobile Robots in Partially Observable Environments’
D
(G)TA
Jumel et al., 2017
‘Mapping likelihood of encountering humans’
D
(G)EB
Krajnik et al., 2017
‘FreMEn: Frequency Map Enhancement for Long-term Mobile Robot Autonomy in Changing Environments’
ND
(G)T
Chen et al., 2016
‘Augmented dictionary learning for motion prediction’
D
(G)TA
Wang et al., 2016
‘Building a Human Behavior Map from Local Observations’
D
(G)TA
Rapp et al., 2016
‘Hidden Markov Model-based Occupancy Grid Maps of Dynamic Environments’
ND
(G)EB
Krajnik et al., 2016
‘Frequency Map Enhancement: Introducing Dynamics into Static Environment Models’
ND
(G)T
Wang et al., 2015
‘Multi-scale Conditional Transition Map: Modeling Spatial-temporal Dynamics of Human Movements with Local and Long-term Correlations’
D
(G)TA
Dadhich et al., 2015
‘Modeling Occupancy Grids Using EDHMM for Dynamic Environments’
ND
(G)EB
Biswas and Veloso, 2015
‘Model-instance Object Mapping’
ND
(G)EB
Wang et al., 2014
‘Modeling motion patterns of dynamic objects by IOHMM’
D
(G)TA
Krajnik et al., 2014
‘Spectral Analysis for Long-term Robotic Mapping’
ND
(G)T
Kucner et al., 2013
‘Conditional transition maps: Learning motion patterns in dynamic environments’
D
(G)TA
Tipaldi et al., 2013
‘Lifelong Localization in Changing Environments’
ND
(G)EB
Saarinen et al., 2012
‘Independent Markov chain occupancy grid maps for representation of dynamic environment’
ND
(G)EB
Meyer-Delius et al., 2012
‘Occupancy Grid Models for Robot Mapping in Changing Environments’
ND
(G)EB
Tipaldi et al., 2012
‘Lifelong Localization and Dynamic Map Estimation in Changing Environments’
ND
(G)EB
O’Callaghan et al., 2011
‘Learning navigational maps by observing human motion patterns’
D
(G)TA
Meyer-Delius et al., 2011
‘Grid-based Models for Dynamic Environments’
ND
(G)EB
Tipaldi et al., 2011
‘Simultaneous Localization and Dynamic State Estimation in Reconfigurable Environments’
ND
(G)EB
Mitsou and Tzafestas, 2007
‘Temporal Occupancy Grid for mobile robot dynamic environment mapping’
ND
(S)C
(Burgard et al., 2007)
‘Mobile Robot Map Learning from Range Data in Dynamic Environments’
ND
(S)C
Stachniss and Burgard, 2005
‘Mobile Robot Mapping and Localization in Non-static Environments’
ND
(S)C
Anguelov et al., 2004
‘Detecting and Modeling Doors with Mobile Robots’
ND
(S)E
Biswas et al., 2002
‘Towards Object Mapping in Non-stationary Environments with Mobile Robots’
ND
(G)EB
Avots et al., 2002
‘A Probabilistic Technique for Simultaneous Localization and Door State Estimation with Mobile Robots in Dynamic Environments’
ND
(S)E
Arbuckle et al., 2002
‘Temporal occupancy grids’
ND
(S)TS
Anguelov et al., 2002
‘Learning Hierarchical Object Maps of Non-stationary Environments with Mobile Robots’
ND
(G)EB
Appendix B. Application
An overview of applications of MoDs. The following abbreviations are used in the table Motion Prediction (MPred), Localization (Loc), Motion Planning (MPlan), Olfaction (O), Task Planning (TP).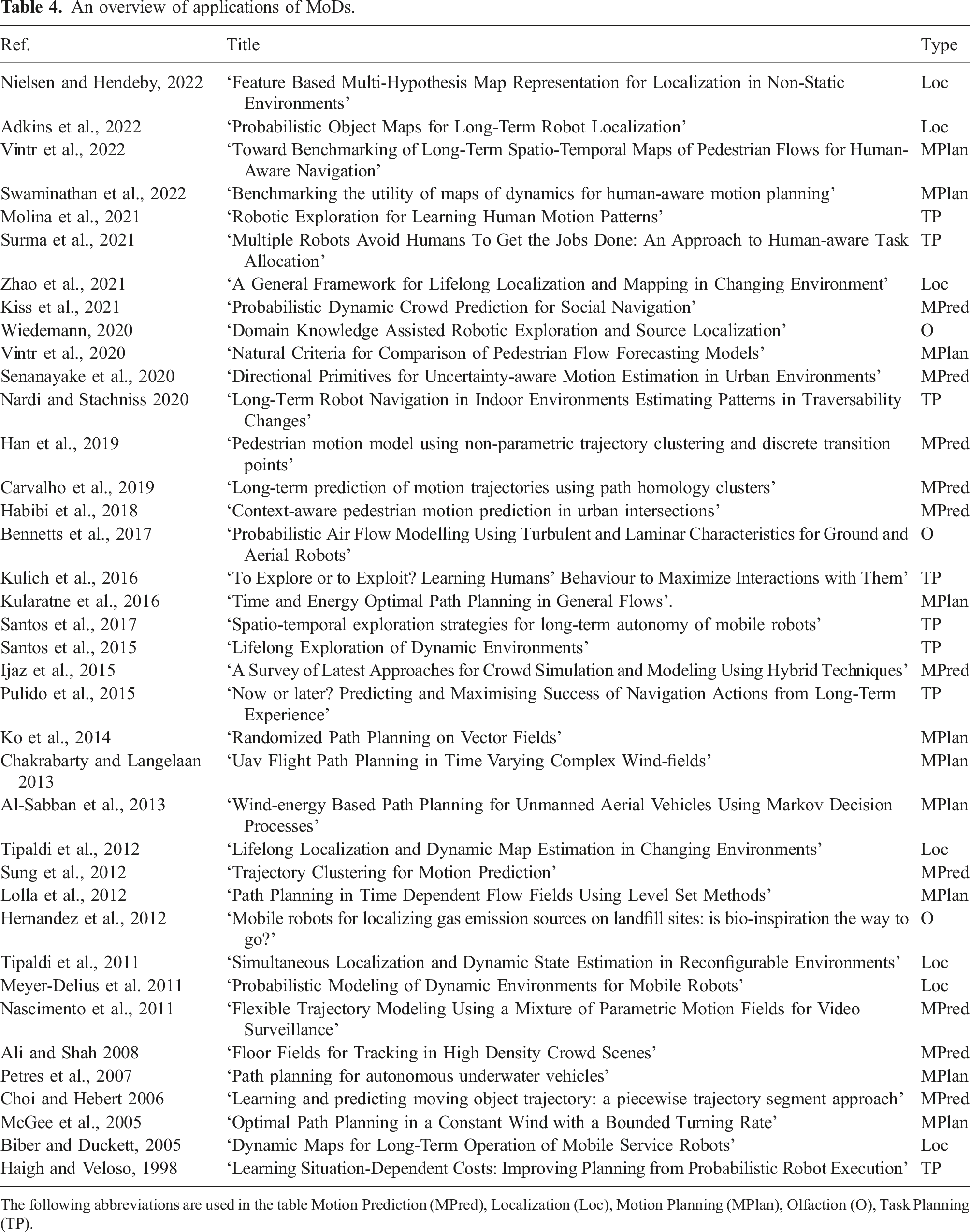
Ref.
Title
Type
Nielsen and Hendeby, 2022
‘Feature Based Multi-Hypothesis Map Representation for Localization in Non-Static Environments’
Loc
Adkins et al., 2022
‘Probabilistic Object Maps for Long-Term Robot Localization’
Loc
Vintr et al., 2022
‘Toward Benchmarking of Long-Term Spatio-Temporal Maps of Pedestrian Flows for Human-Aware Navigation’
MPlan
Swaminathan et al., 2022
‘Benchmarking the utility of maps of dynamics for human-aware motion planning’
MPlan
Molina et al., 2021
‘Robotic Exploration for Learning Human Motion Patterns’
TP
Surma et al., 2021
‘Multiple Robots Avoid Humans To Get the Jobs Done: An Approach to Human-aware Task Allocation’
TP
Zhao et al., 2021
‘A General Framework for Lifelong Localization and Mapping in Changing Environment’
Loc
Kiss et al., 2021
‘Probabilistic Dynamic Crowd Prediction for Social Navigation’
MPred
Wiedemann, 2020
‘Domain Knowledge Assisted Robotic Exploration and Source Localization’
O
Vintr et al., 2020
‘Natural Criteria for Comparison of Pedestrian Flow Forecasting Models’
MPlan
Senanayake et al., 2020
‘Directional Primitives for Uncertainty-aware Motion Estimation in Urban Environments’
MPred
Nardi and Stachniss 2020
‘Long-Term Robot Navigation in Indoor Environments Estimating Patterns in Traversability Changes’
TP
Han et al., 2019
‘Pedestrian motion model using non-parametric trajectory clustering and discrete transition points’
MPred
Carvalho et al., 2019
‘Long-term prediction of motion trajectories using path homology clusters’
MPred
Habibi et al., 2018
‘Context-aware pedestrian motion prediction in urban intersections’
MPred
Bennetts et al., 2017
‘Probabilistic Air Flow Modelling Using Turbulent and Laminar Characteristics for Ground and Aerial Robots’
O
Kulich et al., 2016
‘To Explore or to Exploit? Learning Humans’ Behaviour to Maximize Interactions with Them’
TP
Kularatne et al., 2016
‘Time and Energy Optimal Path Planning in General Flows’.
MPlan
Santos et al., 2017
‘Spatio-temporal exploration strategies for long-term autonomy of mobile robots’
TP
Santos et al., 2015
‘Lifelong Exploration of Dynamic Environments’
TP
Ijaz et al., 2015
‘A Survey of Latest Approaches for Crowd Simulation and Modeling Using Hybrid Techniques’
MPred
Pulido et al., 2015
‘Now or later? Predicting and Maximising Success of Navigation Actions from Long-Term Experience’
TP
Ko et al., 2014
‘Randomized Path Planning on Vector Fields’
MPlan
Chakrabarty and Langelaan 2013
‘Uav Flight Path Planning in Time Varying Complex Wind-fields’
MPlan
Al-Sabban et al., 2013
‘Wind-energy Based Path Planning for Unmanned Aerial Vehicles Using Markov Decision Processes’
MPlan
Tipaldi et al., 2012
‘Lifelong Localization and Dynamic Map Estimation in Changing Environments’
Loc
Sung et al., 2012
‘Trajectory Clustering for Motion Prediction’
MPred
Lolla et al., 2012
‘Path Planning in Time Dependent Flow Fields Using Level Set Methods’
MPlan
Hernandez et al., 2012
‘Mobile robots for localizing gas emission sources on landfill sites: is bio-inspiration the way to go?’
O
Tipaldi et al., 2011
‘Simultaneous Localization and Dynamic State Estimation in Reconfigurable Environments’
Loc
Meyer-Delius et al. 2011
‘Probabilistic Modeling of Dynamic Environments for Mobile Robots’
Loc
Nascimento et al., 2011
‘Flexible Trajectory Modeling Using a Mixture of Parametric Motion Fields for Video Surveillance’
MPred
Ali and Shah 2008
‘Floor Fields for Tracking in High Density Crowd Scenes’
MPred
Petres et al., 2007
‘Path planning for autonomous underwater vehicles’
MPlan
Choi and Hebert 2006
‘Learning and predicting moving object trajectory: a piecewise trajectory segment approach’
MPred
McGee et al., 2005
‘Optimal Path Planning in a Constant Wind with a Bounded Turning Rate’
MPlan
Biber and Duckett, 2005
‘Dynamic Maps for Long-Term Operation of Mobile Service Robots’
Loc
Haigh and Veloso, 1998
‘Learning Situation-Dependent Costs: Improving Planning from Probabilistic Robot Execution’
TP