
Abstract
Magnetically actuated mobile microrobots can access distant, enclosed, and small spaces, such as inside microfluidic channels and the human body, making them appealing for minimally invasive tasks. Despite their simplicity when scaling down, creating collective microrobots that can work closely and cooperatively, as well as reconfigure their formations for different tasks, would significantly enhance their capabilities such as manipulation of objects. However, a challenge of realizing such cooperative magnetic microrobots is to program and reconfigure their formations and collective motions with under-actuated control signals. This article presents a method of controlling 2D static and time-varying formations among collective self-repelling ferromagnetic microrobots (100
1. Introduction
Untethered mobile miniature robots without on-board actuators and power sources could be actuated by external stimuli, such as light (Palagi et al., 2016; Sridhar et al., 2018), acoustics (Ahmed et al., 2017), and electrostatic and magnetic fields (Liu et al., 2017; Palagi and Fischer, 2018). In particular, mobile microrobots actuated and controlled by external magnetic fields can access distant, enclosed, and small spaces, such as inside microfluidic channels and the human body, making them appealing for minimally invasive applications, such as biomedicine (Ceylan et al., 2017; Erkoc et al., 2019; Nelson et al., 2010; Sitti, 2017, 2018; Sitti et al., 2015; Yasa et al., 2018). While single magnetic miniature robots have already shown promising functionalities (Alapan et al., 2018; Hu et al., 2018; Li et al., 2017; Martel, 2017; Park et al., 2017; Singh et al., 2017; Yan et al., 2017), their simplicity increases considerably when scaling down to submillimeter- or micro-scale, limiting their capabilities. Despite the simplicity of individual magnetic microrobots, a collective of these microrobots that can work closely and cooperatively would significantly enhance their functionalities. Such collective microrobots could together exert higher forces and have more advanced functionalities by cooperatively transporting multiple objects using different formations compared with individual microrobots, providing high throughput and fast parallel distributed operation. Moreover, when equipped with advanced programmability of formations and collective motions, these collective magnetic microrobots could also have unprecedented applications in programmable self-assembly (Whitesides and Grzybowski, 2002), swarm systems (Rubenstein et al., 2014; Yang et al., 2018), and modular robotics (Daudelin et al., 2018).
However, enabling a large number of magnetic microrobots to work cooperatively is challenging because magnetic microrobots are easy to cluster due to magnetic interactions and their individual motions are highly coupled. Many methods have been proposed aiming at controlling magnetic microrobots to work closely and cooperatively in large numbers (Chowdhury et al., 2015), e.g., as microrobotic swarms, with programmable and reconfigurable functions.
One strategy in existing works is to individually address and control multiple microrobots by planning their heterogeneous dynamics or kinematics in 2D and 3D environments with global actuation signals (Diller et al., 2012, 2013a; Frutiger et al., 2010), where a small number of magnetic microrobots (up to three) have been controlled independently. Another strategy is to sequentially and spatially select specified microrobots to move, while anchoring other robots by auxiliary forces such as electrostatic forces (Pawashe et al., 2009) or friction induced by magnetic gradient pulling forces (Rahmer et al., 2017). The design and control of these microrobots are limited to individuals or small robot teams due to the disability of these methods for the design and parallel control of large numbers of microrobots. Other methods use local magnetic forces created by miniature coils (Chowdhury et al., 2016; Pelrine et al., 2012) to trap multiple millimeter-sized magnetic robots. It is difficult to scale down the robot size due to the coil resolution and close operation of multiple robots is also difficult because of magnetic interactions.
Instead of individually addressing and controlling microrobots in a team, other works have proposed to simultaneously assemble ferromagnetic microrobots (Diller et al., 2011; Han et al., 2017; Miyashita et al., 2013; Torres and Popa, 2015; Wang et al., 2017) into programmed formations or structures. The realized formation can be reconfigured using a proper disassembly method but the formation is relatively simple. Moreover, other works actuate paramagnetic microrobots such as helix swarms (Servant et al., 2015; Wu et al., 2018), magneto-bacteria clusters (De Lanauze et al., 2014; Felfoul et al., 2016), and paramagnetic microparticles or nanoparticles in formations of asters (Snezhko and Aranson, 2011) and ribbons (Yu et al., 2018a, b). These assembled structures rely on a rotating or vibrating external magnetic field and usually work as a soft body with limited morphologies.
Although these existing methods all represent advancements towards programmable and reconfigurable cooperative magnetic microrobot swarms, it is still a challenge to produce versatile desired formations among a large number of magnetic microrobots, owing to the lack of systematic methodology for actuation and control.
On the other hand, it is also challenging to enable complex collective motions and reconfigurable cooperative functions into these magnetic microrobots. Although cooperative manipulation using collective magnetic matter has been shown before in micro-scale systems in experiments (Snezhko and Aranson, 2011; Torres and Popa, 2015; Wang et al., 2018a, b; Xie et al., 2019) and simulations (Becker et al., 2013; Shahrokhi et al., 2018), they cannot complete versatile manipulation tasks on demand owing to the limited reconfigurability. For example, dynamically assembled magnetic asters have been shown to trap objects at a liquid–liquid interface (Snezhko and Aranson, 2011). In the approach of Torres and Popa (2015), submillimeter-scale ferromagnetic microrobots in a disk-shaped formation have been controlled by non-uniform external magnetic gradient forces to collectively transport objects on 2D solid substrates (up to 14 robots). Magneto-bacteria clusters have been used to assemble 2D structures via a pushing-type manipulation strategy by Martel and Mohammadi (2010). Ferromagnetic microparticles in chains, ribbons, and “vortex”-like patterns controlled by rotating or vibrating magnetic fields have been shown to collectively push objects on 2D solid substrates (Xie et al., 2019).
In this article, to overcome these challenges, we report a method of controlling desired 2D static and time-varying formations among self-repelling collective ferromagnetic microrobots at the air–water interface. These microrobots are from 100 µm to 350 µm in diameter and up to about 260 in number, referred as microrobots as is the convention (Diller et al., 2013b). The method is potentially also applicable on 2D solid surfaces (see Appendix B for preliminary results) or with other type of physical constraints, but we focus on the air–water interface in this work as a proof of concept.
In this work, for the static formations, our method is to program the system equilibrium of collective self-repelling magnetic microrobots by patterning desired magnetic potential energy maps. The external magnetic potential energy maps are created by designing external ferromagnet arrays with a model-based design method. A theoretical analysis of functional basis is presented to explain the programmability of the external magnetic potential energy distribution function. With such a method, versatile complex static formations are created among collective magnetic microrobots experimentally. Scaling analysis of the static formations as a function of robot sizes, magnetic properties, shapes, and their population size, has been provided.
For time-varying formations, external magnetic potential energy distribution is programmed both spatially and temporally, allowing bio-inspired collective motions and reconfiguring collective formations among collective magnetic microrobots. Although the individual magnetic moment and position of each ferromagnet in an external magnet array cannot vary on-site, we show that the magnetic potential energy landscape can indeed be varied spatially and temporally by controlling the rigid-body motions of external magnet arrays. Here, we demonstrate the collective mobility of these magnetic microrobots by controlling them to exhibit bio-inspired collective behaviors such as aggregation, directional motion with arbitrary swarm headings, and rotational swarming motion.
Finally, the functions of the produced microrobotic swarm are demonstrated by controlling them to navigate through cluttered environments and complete reconfigurable cooperative manipulation tasks, such as cooperative “pushing,”“caging,” and “grasping,” demonstrating efficient cooperation with fast parallel distributed operation. The ability of reconfiguring formations with different morphologies and stiffness further enhances the functionality of these collective magnetic microrobots for diverse tasks, compared with existing work.
A preliminary version of this work has been presented as a conference paper (Dong and Sitti, 2019), where the concept of programming static collective formations and cooperative functions into microrobotic swarms has been introduced. This work expands on the conference paper with the general theory and design rules for programming external magnetic fields and collective static formations. At the same time, this work also presents the methodology of programming time-varying formations demonstrating reconfiguring collective formations and controlling bio-inspired collective motions among collective magnetic microrobots. Moreover, more details are also added including the analysis on floating conditions, modeling of interaction between collective magnetic microrobots and the manipulated objects, experimental procedures, and the preliminary result of collective formations on solid surfaces.
The article is organized as follows. Section 2 introduces the concept of controlling static collective formation, bio-inspired collective motions and reconfigurable cooperative functions. Section 3 presents the dynamic model of collective magnetic robots at the air–water interface, the theory and methodology of programming static formations and controlling time-varying formations. Section 4 shows the experimental characterization, setup, and results of collective static formations. Section 5 gives the experimental results of bio-inspired collective motions. Section 6 presents the experimental results of reconfiguring collective formations and reconfigurable cooperative manipulation of objects. The article is concluded in Section 7.
2. Concept and system
2.1. Programmable collective formation
The key concepts of programming collective formations include two parts. First, to avoid magnetic robots clustering when close to each other, their motions must be constrained such that their inter-modular reaction is always repulsive. Second, the equilibrium positions of these microrobots must be programmable and reconfigurable. Here, we propose to create collective self-repelling magnetic microrobots and program their equilibrium positions by designing an external magnetic potential energy distribution (Figure 1). The air–water interface is employed as a physical constraint in this work as a proof of concept, although the method is potentially also applicable on 2D solid surfaces, which are discussed briefly in the discussion section. The air–water interface allows surface tension to constrain the orientations of magnetic microrobots vertically and balance forces in the
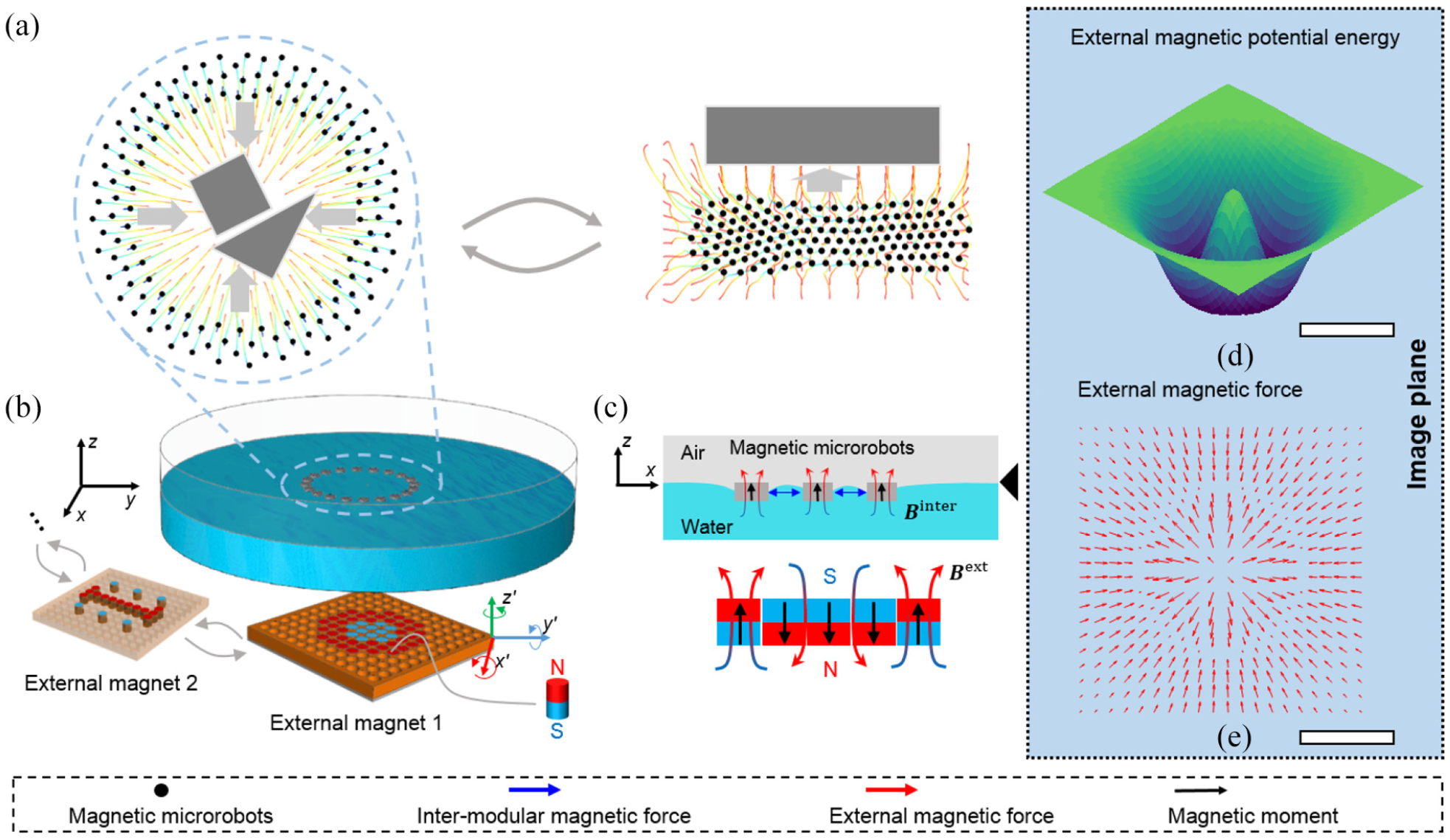
Concept of the designed programmable and reconfigurable collective system. (a) Concept of programmable and reconfigurable formation of collective magnetic microrobots. Black dots and colored lines represent magnetic microrobots and their trajectories, respectively. Objects in different shapes are being manipulated by magnetic microrobots working cooperatively. (b) Overview of the designed programmable collective system. Programmed external magnets induce various pattern formations of ferromagnetic microrobots at the air–water interface. The external magnet can translate and rotate in 3D space for producing time-varying formations and collective motions. (c) Side view of the designed programmable collective system. Ferromagnetic microrobots with vertical magnetic moments repel each other due to inter-modular repulsive magnetic forces. The external magnet creates spatially variant magnetic fields
For multiple magnetic microrobots exposed to an external magnetic field

At an equilibrium state, magnetic microrobots transform to a static pattern to minimize the total magnetic potential energy
At the submillimeter scale, independently controlling individual agents is difficult owing to the severe under-actuation of external magnetic fields. Instead of independently addressing each microrobot to a specific position, we propose to concurrently control the overall formation of the magnetic microrobots by programming
2.2. Bio-inspired collective behavior and cooperative functions
If we can program a set of collective formations sequentially, one can imagine a swarm of microrobots constantly change their formations depending on the tasks and work cooperatively similar to small animal collectives such as ants and other animals (Mlot et al., 2011; Sumpter, 2010).
Here we can further spatially and temporally vary an external magnetic potential energy landscape
Compared with other existing microrobotic systems using self-assembled magnetic matter, our proposed collective microrobotic system has two advantages. First, the collective microrobots can reconfigure their static collective formations, i.e., changing shapes, on demand, to work as a cooperative microrobotic swarm capable of reconfigurable cooperative manipulation. Second, the collective magnetic robots in a static formation show soft-body-like behaviors owing to the inter-modular repulsion allowing intrinsic compliance within the group for morphological adaptability when collectively navigating through a cluttered environment and cooperatively manipulating objects.
3. Theory and methodology
This section presents the theory of programming static and time-varying formations.
3.1. Dynamics of collective magnetic microrobots
As shown in Figure 2, assuming the forces in the vertical direction are always balanced, the motion of each magnetic microrobot on the image plane
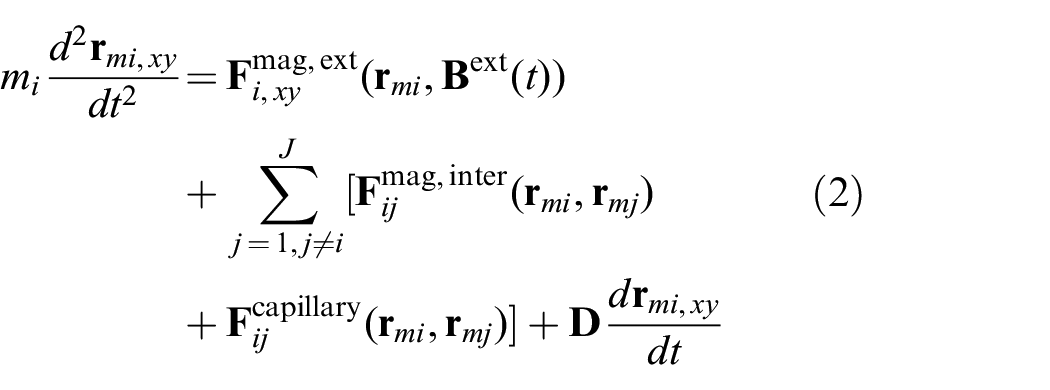
where
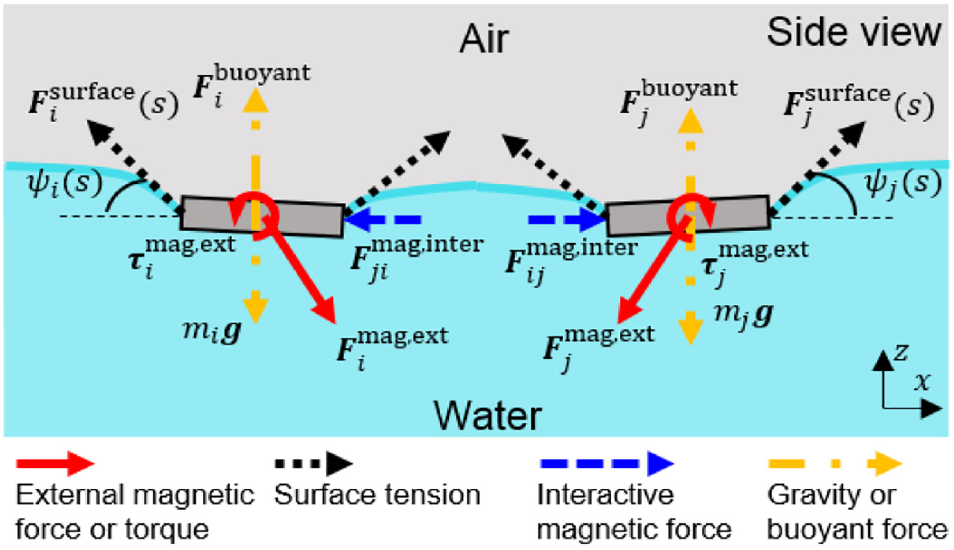
Schematics of pairwise interactions between magnetic microrobots. Side view of a pair of magnetic microrobots at the air–water interface. Here
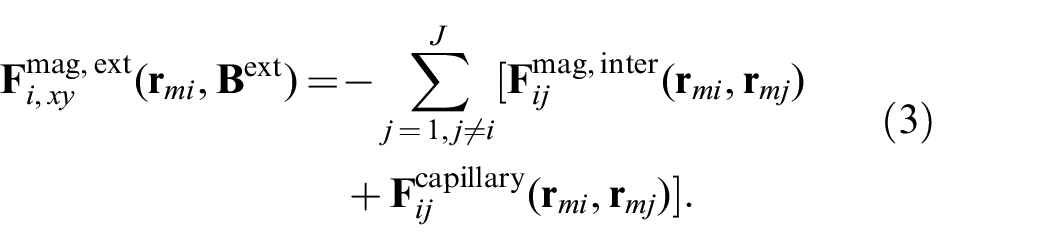
At an equilibrium state, the horizontal force balancing condition for the
3.2. Static formation as system equilibrium
At a static state, the overall formation depends on the system equilibrium under a spatially distributed external magnetic field. The system equilibrium can be derived from the total potential energy, which is given by
where
It should be noted that magnetic robots tend to be as far away from each other to minimize the first term in (4). However, because of the existence of the second term, the system equilibrium is given by minimizing the total potential energy according to


where Equation (6) means
3.3. Programming static formations
To understand the programmability of
At a point

where

where
By concatenating the equations in (7) at the

where
The external magnetic potential energy distribution that we can create can be clarified by a linear basis analysis of the matrix
On the other hand, the desired external magnetic potential energy distribution on the image plane needs to be encoded according to a desired formation. An external magnetic potential energy distribution on the image plane can be expanded using Taylor expansion, given by
where
3.4. Design external magnets
External magnets can be implemented with electromagnets or ferromagnets. Compared with electromagnets (Kummer et al., 2010), ferromagnets can produce a more complex magnetic potential energy distribution within a similar range owing to a higher energy density, which allows more degrees of freedom for programming complex static formations. Existing work on programming ferromagnets have been mainly focusing on producing uniform magnetic fields using optimized Halbach arrays (Choi and Yoo, 2008; Cooley et al., 2018). Here we present a method of programming ferromagnets for a desired non-uniform distribution of magnetic fields and magnetic potential energy. As formulated in (7), both the 3D magnetic moments
The desired magnetic potential energy distribution is matched by programming the positions

where
The desired magnetic potential energy distribution is encoded from the desired formation pattern, where the desired pattern is coded as low energy and other parts as high energy (zero by default). The value of low energy is given by a negative nominal value
The potential positions of modular or bulk-shaped magnets are sampled in a predefined 3D volume, which is under the image plane and has similar sizes with the formation pattern for
The magnetic moment at each potential position is iteratively optimized by choosing the number of modular or bulk-shaped magnets
A finite element model (Multiphysics 5.3a and Livelink for MATLAB, COMSOL Inc.) of ferromagnets is used for computing the matrix
The formations of magnetic microrobots are simulated based on the obtained magnetic potential energy distribution in (d) and the predictive dynamic model given by (2).
The assembly of external magnet arrays are assisted by laser-cut wood fixture jigs and adhesive tapes (Figure 3(c)).
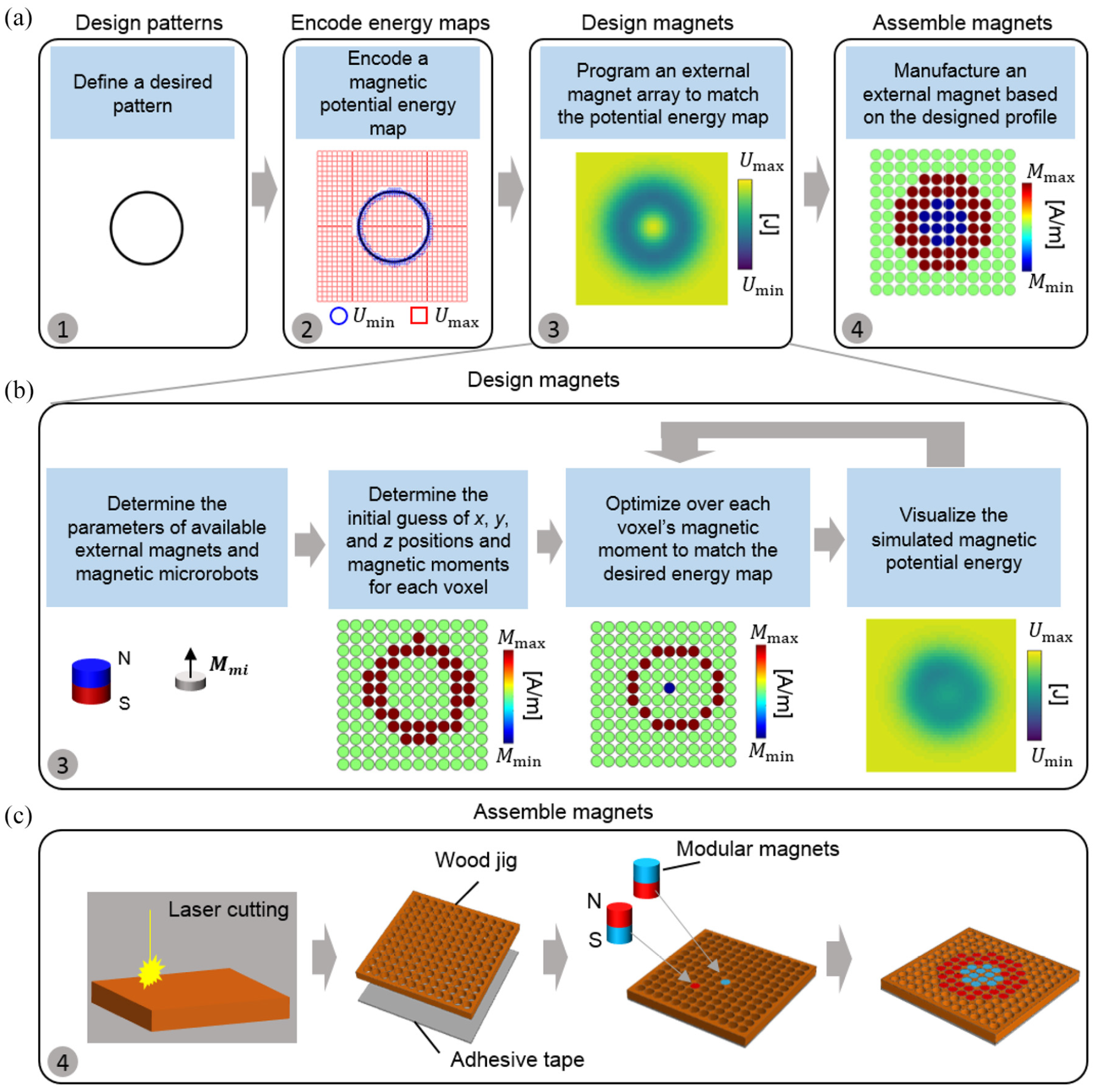
Programming external magnetic potential energy maps using ferromagnets. (a) Overall workflow of programming a desired external magnetic potential energy map given a user-defined pattern. (b) Workflow of designing an external magnet array for a desired external magnetic potential energy map. (c) Assembly process of an external magnet array with assistance of laser-cut wood fixtures and adhesive tapes. In the color bars:
The design method used here is an iterative optimization approach based on predictive models, as it is difficult to solve a high-dimensional integer optimization problem of matching a desired magnetic potential energy distribution using modular magnets with discrete magnetization profiles. In contrast, with external magnets with continuous magnetization profiles, the optimization problem can be solved using a quadratic programming algorithm (Boyd and Vandenberghe, 2004).
3.5. Programming time-varying formations
Collective motion can be further controlled with a spatially and temporally varying external magnetic potential energy distribution
With a single external magnet array, the total external magnetic potential energy at the position
where
3.5.1. Collective aggregation
Magnetic microrobots can aggregate into a compact formation, by decreasing the size and increasing the strength of the external magnetic potential energy well. With ferromagnets as external magnetic sources, aggregation can be realized by decreasing the distance
3.5.2. Collective translation and rotation
Magnetic microrobots can translate and turn in a desired trajectory while still maintaining their formation shape, by translating the potential energy distribution in the
3.5.3. Generalized time-varying formations
With multiple predesigned external magnet arrays, a more complex spatially and temporally varying external magnetic potential energy distribution can be produced by coordinating their rigid body motions, as given by
where
4. Collective static formations
This section presents the experimental setup, experimental results of creating collective static formations, and the analysis of scaling effect, pairwise interactions and floating conditions.
4.1. Microrobots characterization
The magnetic microrobots were made of microparticles of neodymium–iron–boron (NdFeB) alloy (MQP-15-7, Magnequench, Inc.; average diameter 5
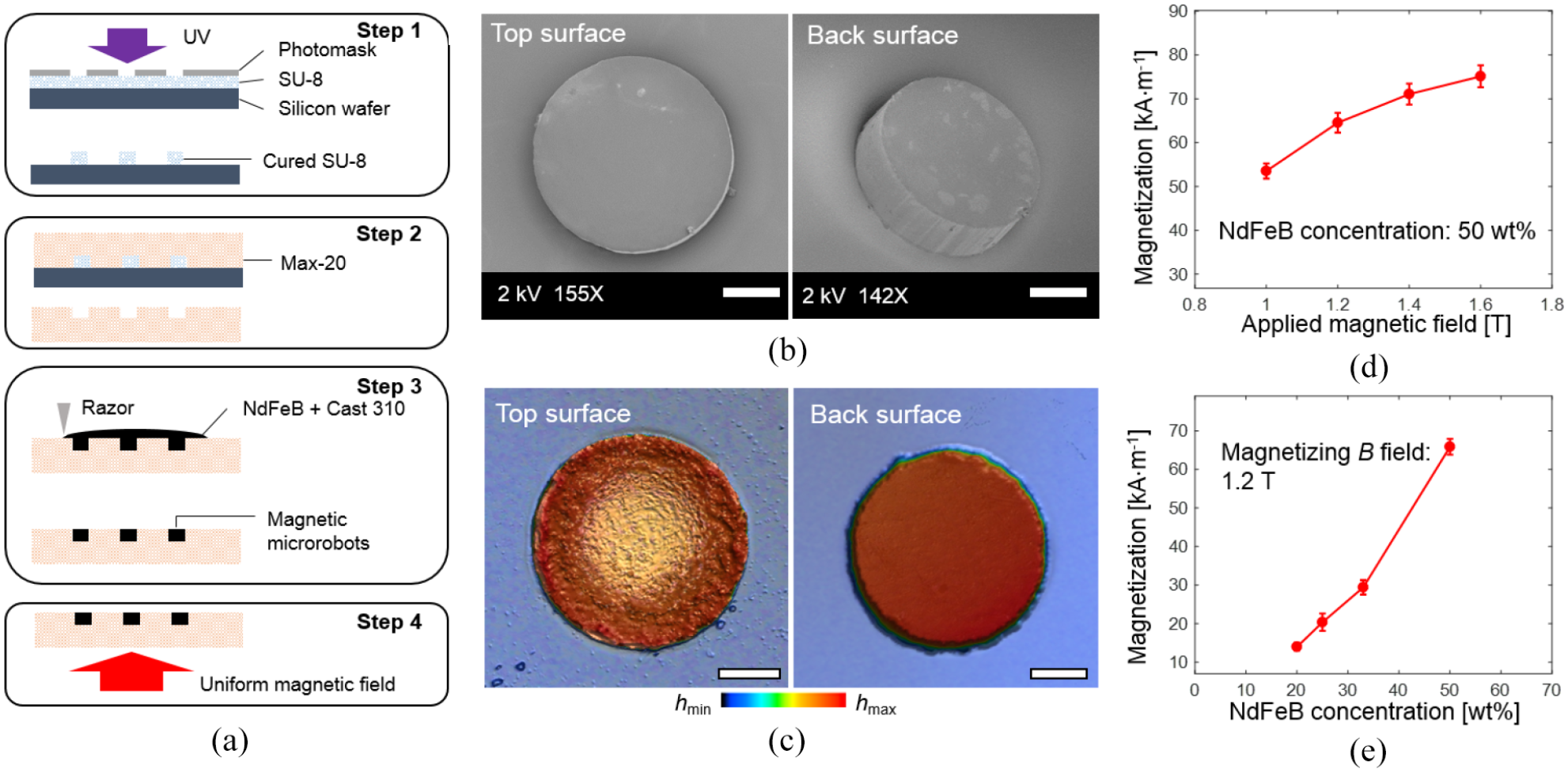
Manufacture and characterization of ferromagnetic microrobots. (a) Manufacture process of magnetic microrobots using a molding method. (b) Images of top and back surfaces of a magnetic module in a disk shape (diameter ~350
The magnetic microrobots in disk shapes in all the demonstrations had an average diameter of 350.5
4.2. Experimental setup
Discrete ferromagnets were assembled into wood jigs to fix their positions and orientations according to the designed profile. The wood jigs were cut by a laser cutting machine (ProtoLaser 3D, LPKF Laser & Electronics AG) with an accuracy of
As shown in Figure 5(a), the prototyped system comprised a Petri dish container in two different sizes (inner diameters 137 and 89 mm; height 18 and 14 mm, respectively) filled with deionized water. We used deionized water to avoid dusts, although in general other clean water could also work for our purposes. An artificial arena was added inside the bigger Petri dish. The containers were supported by customized sample holders (Figure 5(b)). Magnetic microrobots were manually placed at the air–water interface by tweezers with the back surface touching water. This procedure was assisted by an external ferromagnet under the container. The distance from the air–water interface to the bottom of the container was adjusted by adding or retrieving water. In all the experiments of static formations as well as the navigation and manipulation experiments, the external magnet arrays were manipulated manually. In the experiments of rotational swarming, fast flocking, gathering, the external magnet arrays were remotely manipulated using a customized
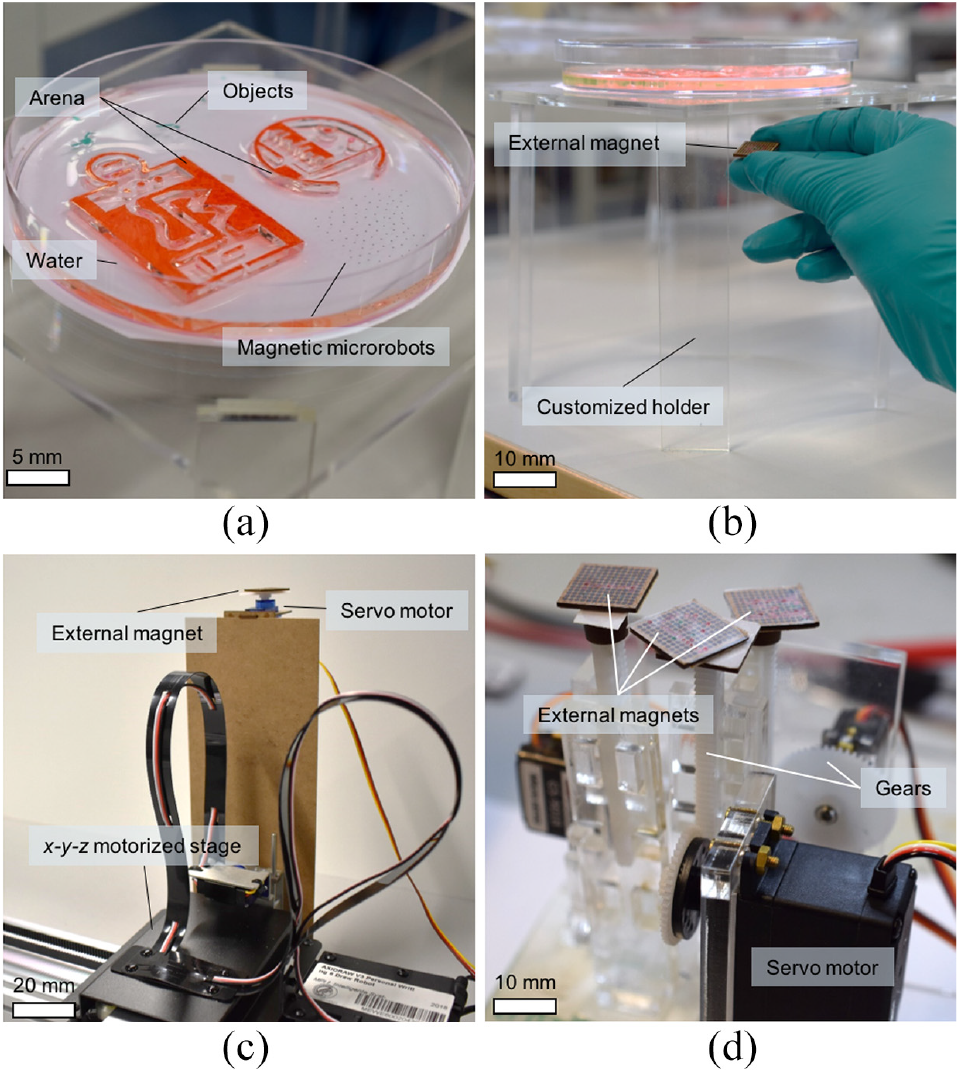
Experimental setup. (a) Top-view photo of the experimental setup. (b) Side-view photo of the experimental setup. (c) Motorized stage (
4.3. Versatile static formations
The versatility of formations arises from the excessive programmability of external magnetic potential energy maps. In Figure 6, we demonstrated creating a variety of desired complex static formations among 146 magnetic microrobots at the air–water interface, including letters “M,”“P,”“I,”“A,”“B,”“C,” and a “wrench”-shaped pattern (Figure 6(a) and Extension 1). To create the desired external magnetic potential energy maps, we programmed arrays of cubic or cylindrical modular ferromagnets as external magnets (Figure 6(b)). Predictive models of magnetic potential energy maps and collective formations given by (9) and (2) were also used to guide the design of external magnets (Figure 6(c) and (d)). Here, NdFeB ferromagnets were chosen for building the external magnets because their small sizes (down to
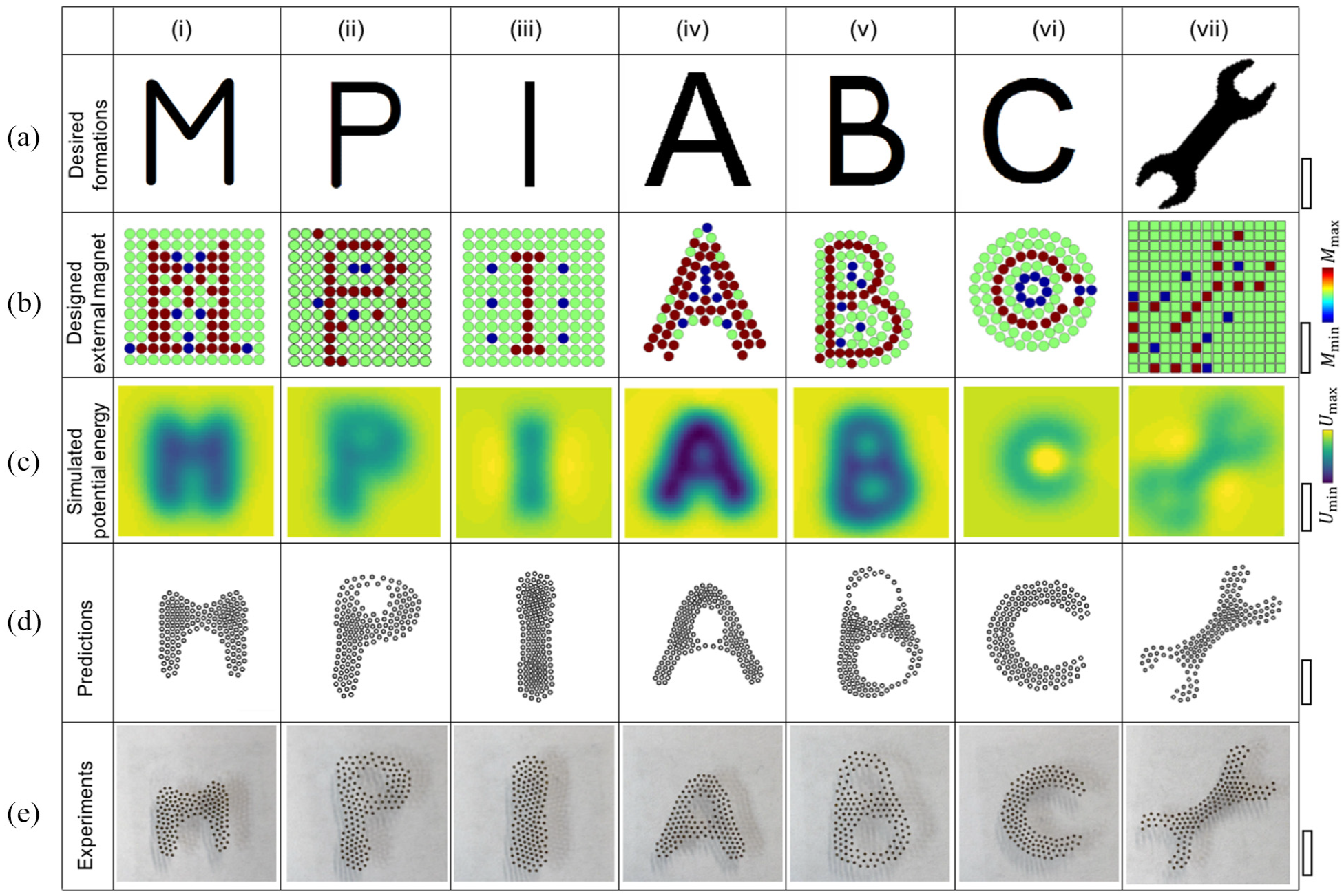
Experimentally realized static formations of collective magnetic microrobots, demonstrating the programming method. (a) Desired formation patterns. (b) Magnetization profiles of designed external magnets. The circular and square-shaped elements represent cylindrical and cubic magnets, respectively. The color represents the magnetization magnitude and direction. In the color bar:
The proposed method allows both homogeneous and heterogeneous magnetic microrobots of various sizes and populations to form desired 2D patterns. First, to create a full formation pattern, the population size of magnetic microrobots must be large enough to cover the region of interest (encoded by the desired pattern) in the potential energy map (Figure 7(a)). Next, formations can be created with homogeneous magnetic microrobots of various magnetic moments, sizes, and shapes. Exposed to the same external magnetic field, the formation packing density (number of microrobots per unit area) is higher with magnetic microrobots of smaller magnetic moments (Figure 7(b)) owing to weaker inter-modular repulsion. Formation pattern is independent of the sizes and shapes of magnetic microrobots but centrosymmetric shapes (Figure 7(c)) and smaller sizes (Figure 7(d)) are preferred for smoother contours of formations. Moreover, heterogeneous magnetic microrobots with different magnetic moments, shapes, and other domain properties can also produce a desired formation (Figure 7(e)). Finally, the formation stiffness is also programmable, allowing advanced manipulation capability as microrobot collectives. The stiffness of a formation depends on the inter-modular distance and determines the compliance of collective magnetic microrobots when moving together and interacting with other objects. Compared with existing methods of creating self-assembled magnetic structures, our method allows collective magnetic microrobots to have programmable and considerably more versatile formations simply by designing different external magnets.
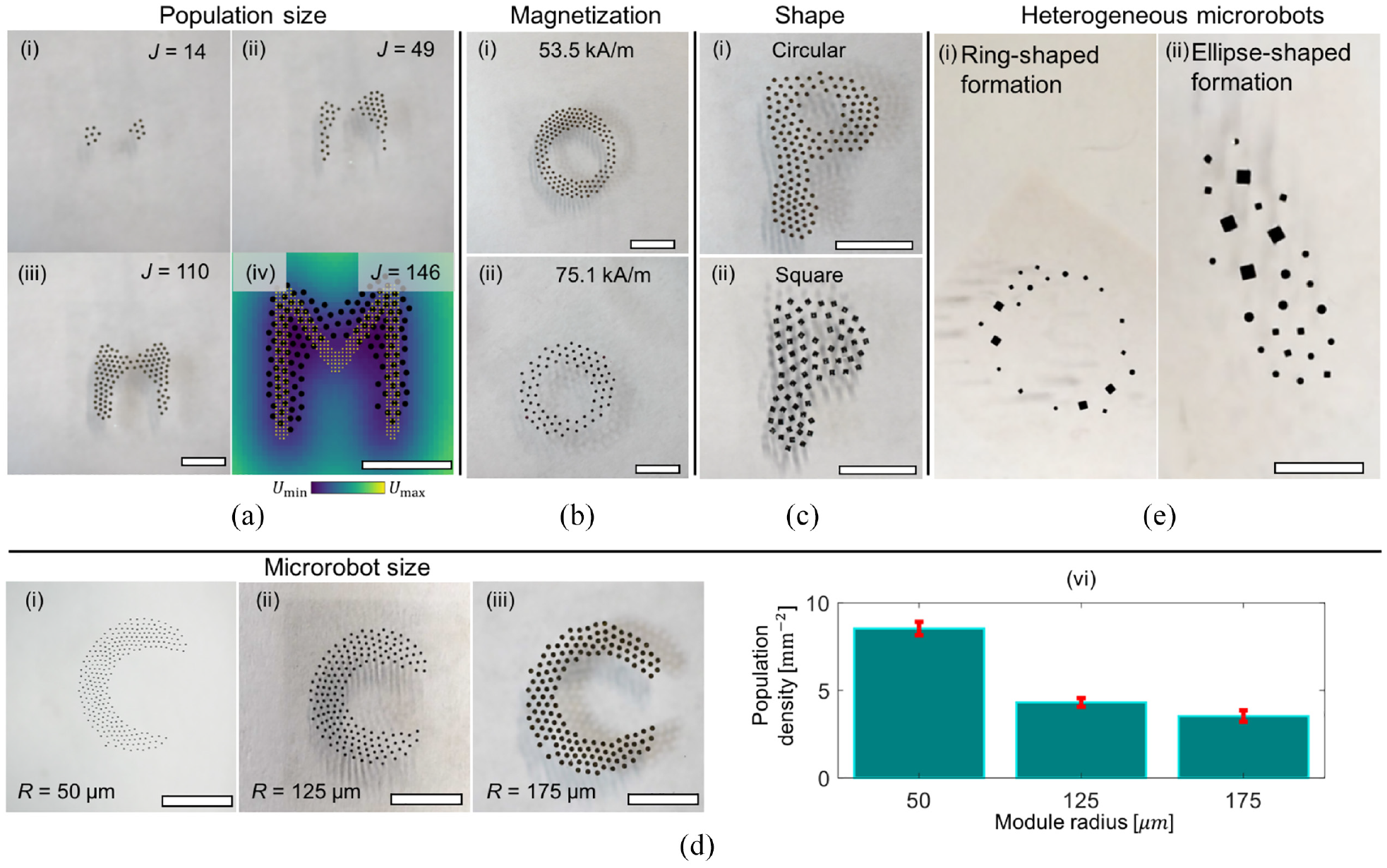
Scaling analysis on static formations of collective magnetic microrobots. (a) Varying the population size (the number of magnetic microrobots
4.4. Pairwise interaction
The pairwise equilibrium distances for magnetic microrobots of different diameters were studied to understand the un-clustering conditions. Assuming the body axes and magnetic moments of microrobots are in vertical directions, pairwise capillary force exerted on a pair of magnetic microrobots in the lateral directions are modeled as follows

where

where


Assuming
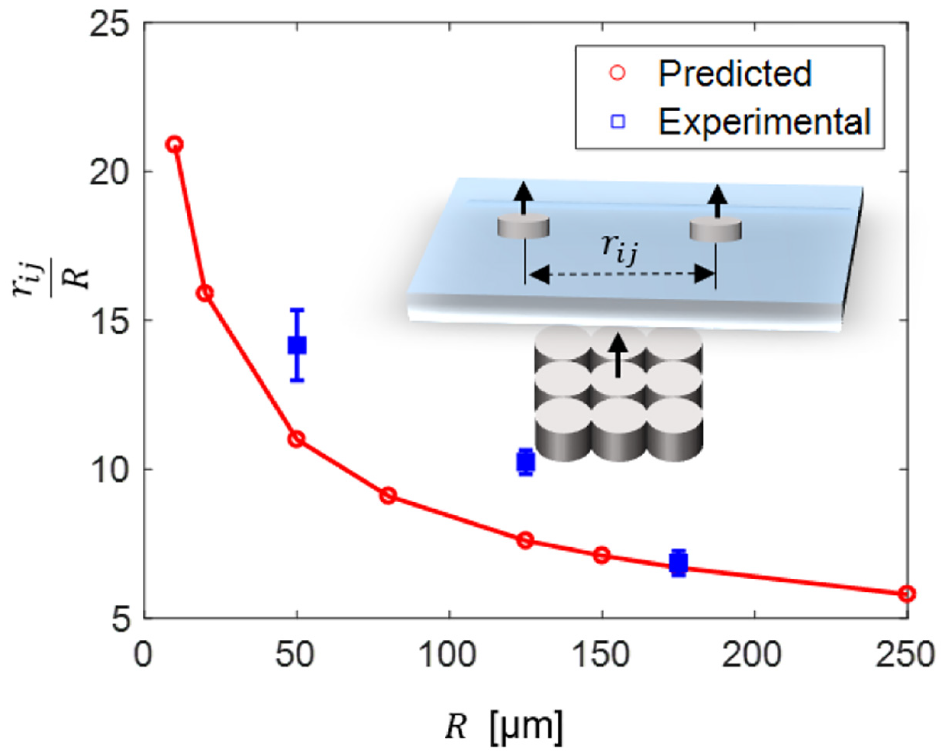
Analysis of pairwise interactions between magnetic microrobots. Predicted and experimental pairwise equilibrium distances for magnetic microrobots in different diameters. Error bars indicate the standard deviation from
4.5. Floating condition
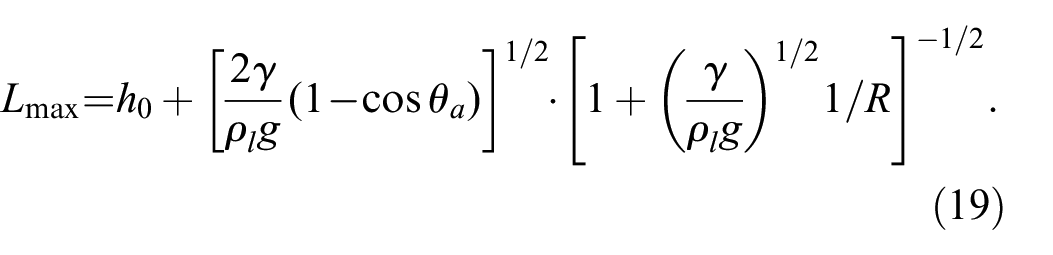
The maximal balancing force for the microrobot from surface tension is derived by adapting a model from Extrand and Moon (2008) assuming the body axis aligns vertically. We also assume the distribution of contact angles along the boundary is uniform (monopole) for ease of scaling analysis, although high-order terms can be added to compensate for the multipole effects in surface tension. The maximal lift force from the air–water interface is given by

where
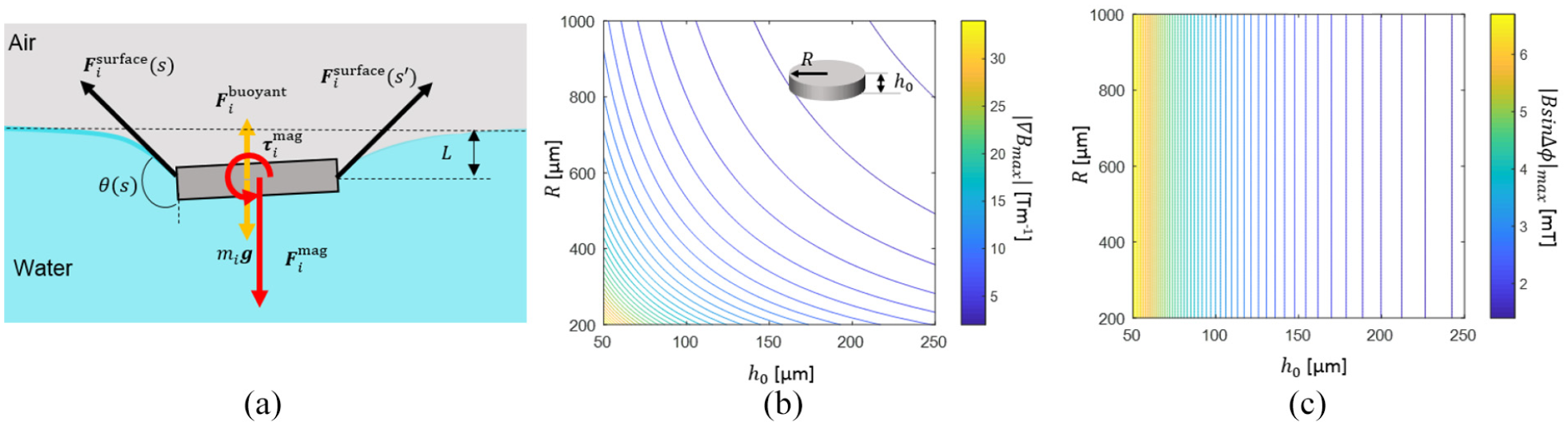
Critical floating condition of a magnetic microrobot at the air–water interface as a function of its size. (a) Schematics of a disk-shaped magnetic microrobot floating at the air–water interface. (b) Simulated maximally allowable applied spatial gradient of external magnetic fields for a single disk-shaped magnetic microrobot floating at the air–water interface. (c) Simulated maximally allowable applied magnetic field for a single disk-shape microrobot floating at the air–water interface. Parameters other than the dimensions of magnetic microrobots are same to that of the microrobots in Figure 6(e) in the main text.
Hence, we have the condition of floating for a magnetic microrobot, given by

where the variables
The maximal balance torque from surface tension is given by

which is further is given by

assuming the contact angles along the contact line can be simplified as

where

where
5. Bio-inspired collective motion
This section presents versatile collective motions of magnetic microrobots and their soft-body-like collective navigation through cluttered environments, demonstrating the collective mobility of magnetic microrobots enabled by the proposed method.
5.1. Collective behavior
Inspired by the motions from small-scale animal collectives (Sumpter, 2010), in Figure 10 we demonstrated controlling the external magnetic energy distribution to create a microrobotic swarm capable of complex collective behavior. First, like the aggregation behavior of ants (Mlot et al., 2011), magnetic microrobots aggregated into a compact formation as shown in Figure 10(a), by decreasing the size and increasing the strength of the external magnetic potential energy well when moving the external magnet in the
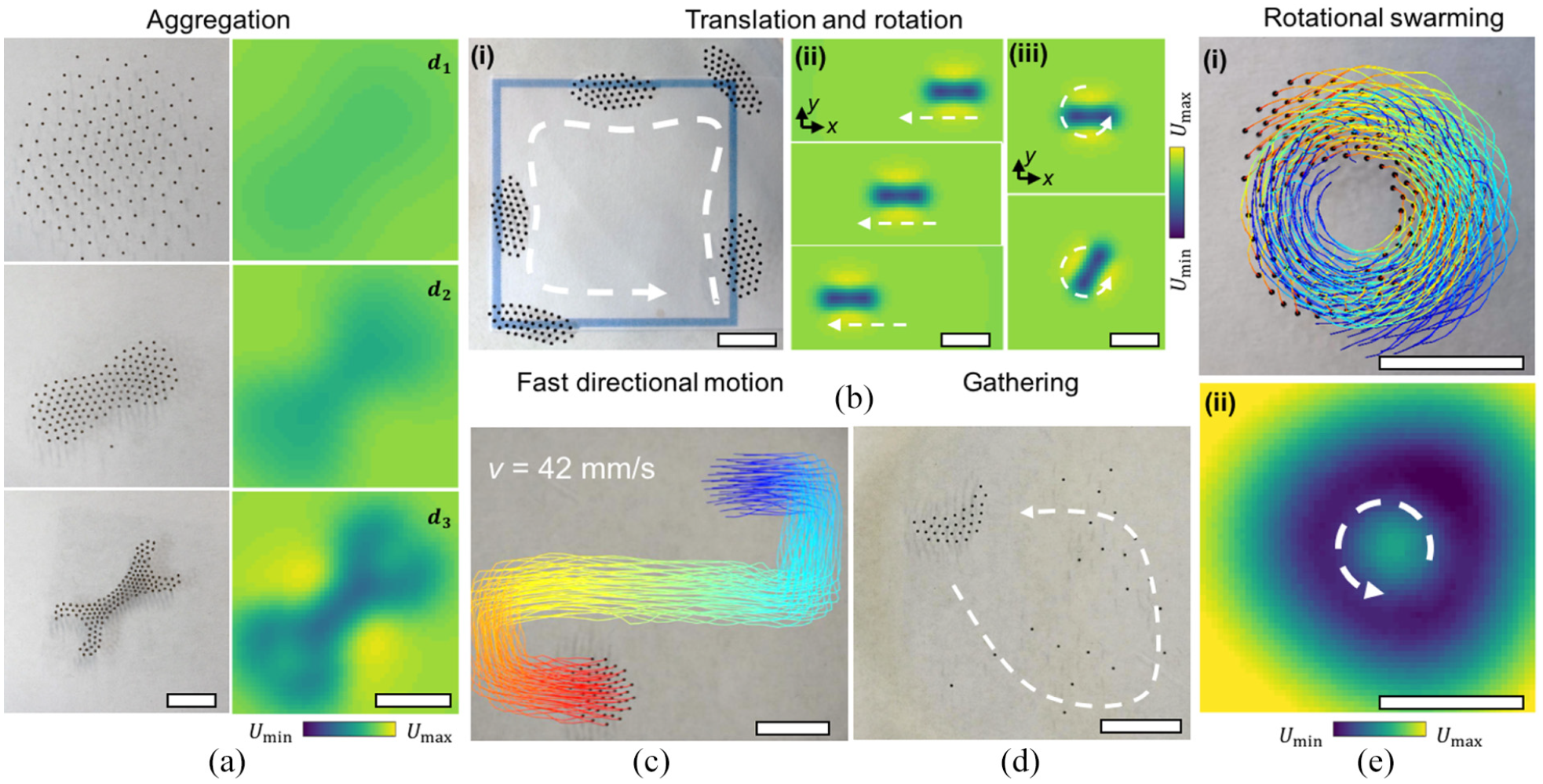
Controlling collective motions of magnetic microrobots demonstrating collective mobility. (a) Left: video (Extension 1) snapshots show the aggregation of 146 disk-shaped magnetic microrobots. Right: the simulated external magnetic potential energy (using the magnetic dipole model) on the image plane. The distances from the top surface of the external magnet to the image plane are
Fast directional collective motion of these microrobots in a designed formation was realized by controlling the motion of an external magnet in a planned trajectory (Figure 10(c) and Extension 2). During the collective movement, magnetic microrobots also experienced fluid drag forces by which their formations were also distorted. Such damping effect limits the maximal navigation speed of collective magnetic microrobots while they still maintain the desired formation. The maximal speed generally depends on the strength of external magnetic potential energy distribution and has been experimentally found to be around 42 mm·s−1 for a disk-shaped formation. Automated gathering of free microrobots out of the formation was also realized by controlling the external magnetic potential energy well to follow a planned path (Figure 10(d) and Extension 2).
In addition, like the milling behavior of fish schools (Herbert-Read et al. (2011)), these magnetic microrobots also exhibited collective rotational behavior (Figure 10(e) and Extension 2) by creating a rotational external magnetic force distribution when spinning a designed external magnet about its
5.2 Soft-body-like adaptive navigation
Small animals can take advantage of their formation as a group for different tasks such as foraging, migrating, and escaping from danger (Sumpter, 2010; Tan and Zheng, 2013). For example, an army of fire ants (Mlot et al., 2011) can survive from a water flood by collectively floating at the air–water interface in a disk-shaped formation. In addition, soft organisms (Brackenbury, 1997) can navigate through cluttered environments exploiting their morphological adaptation and compliance when physically interacting with the environment.
Inspired by these behaviors, we created a microrobotic swarm capable of transforming into a formation and collectively navigating through confined spaces taking advantage of their actively designed formation and intrinsic compliance. The collective magnetic microrobots were capable of navigating through complex cluttered environments by adapting the formation morphology during the interaction with the environmental boundaries (Figure11(a) and Extension 3). First, the designed formation, such as an ellipse-shaped formation, provided a level of adaptation in morphology to the environmental boundaries by minimizing the contact area with channel walls. Moreover, the compliance from inter-modular repulsion further enhanced the adaptability and flexibility of negotiating through narrow channels and holes and over posts (Figure 11(b)–(d)). For example, by pushing the boundaries and each other, magnetic microrobots could pass through narrow holes as shown in Figure 11(d). Finally, the redundancy in the collective microrobots also provides robustness for fault tolerance, similar to their counterparts in nature. For example, during the navigation, these magnetic microrobots still maintained their formation even when they lost some agents (Extension 3). Therefore, compared with a large monolithic robot, the designed microrobotic swarm have more flexibility of accessing confined space by adapting to the morphological constraints in the environments, and are more robust against agent failure.
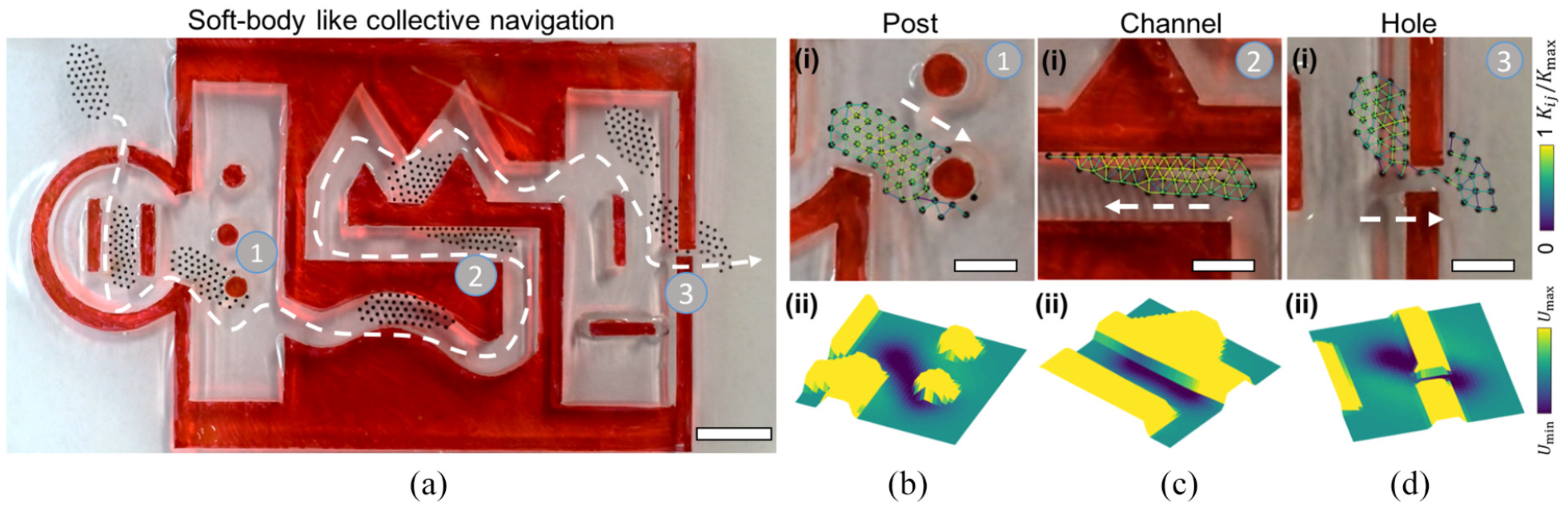
Collective navigation of a microrobotic swarm through cluttered environments with morphological adaptation. (a) Video (Extension 3) snapshots show 49 magnetic microrobots navigate in an ellipse-shaped formation in a cluttered environment. Locations marked with labels “1,”“2,” and “3,” are enlarged in (b)–(d). The dashed white arrows indicate the moving directions. (b)–(d) (i) Adaptation to environmental constraints from the inter-modular compliance of the microrobotic swarm while navigating around posts and through channels and holes and (ii) the modeled total potential energy maps from both external magnetic fields and environmental constraints (environmental boundary energy was modeled with artificial potential field from Khatib (1986)). Colored segments connecting magnetic microrobots in (i) in (b)–(d) indicate normalized inter-modular stiffness (
6. Reconfigurable cooperative manipulation
This section presents the experimental results of reconfigurable cooperative manipulations, demonstrating example applications of the proposed design and control methods for collective magnetic microrobots.
6.1. Reconfiguring collective formations
Figure 12 shows several representative examples of reconfiguring formations of collective magnetic microrobots. First, rotating an external magnet about its
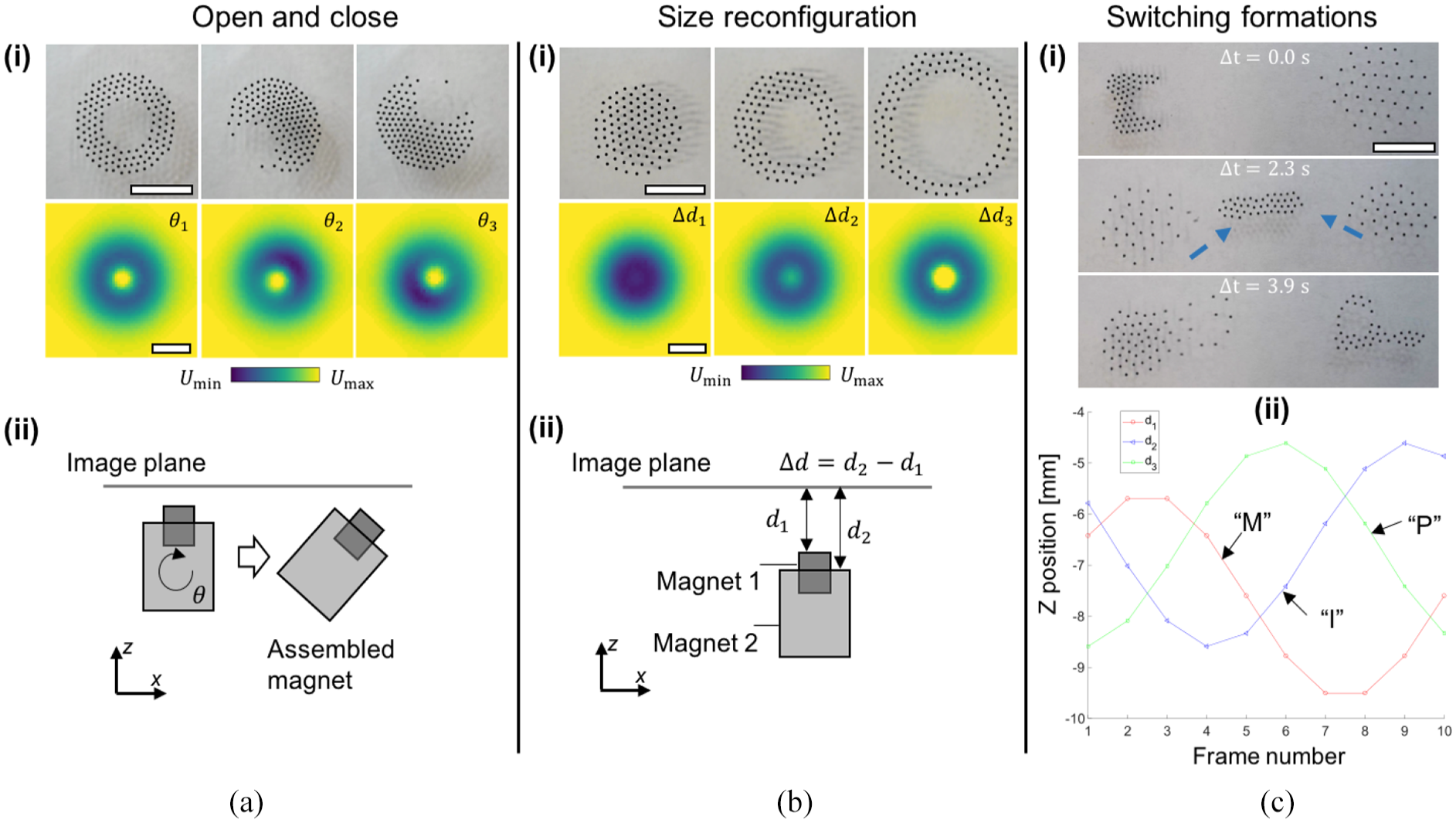
Reconfiguring formation of collective magnetic microrobots demonstrating reconfigurability. (a) Open and close of a ring-shaped formation as a “gripper.” (i) Top: video (Extension 4) snapshots of reconfiguration between ring-shaped and “C”-shaped formations (101 magnetic microrobots) by rotating the external magnet about a direction vector
6.2. Reconfigurable cooperative manipulation
Compared with single robots, swarms of microrobots working together can exert higher force for manipulating large objects. The collective formation also allows more efficient manipulation of objects, such as transporting single large objects or multiple objects simultaneously. For example, by using caging-type manipulation (Rodriguez et al., 2012), microrobots can transport many objects at the same time. Although cooperative manipulation using collective magnetic matter has been shown before in micro-scale systems in experiments (Snezhko and Aranson, 2011; Torres and Popa, 2015; Wang et al., 2018a,b; Xie et al., 2019) and simulations (Becker et al., 2013; Shahrokhi et al., 2018), they cannot complete versatile manipulation tasks owing to the limited reconfigurability. In contrast, animal collectives can reconfigure their formations depending on the tasks, such as foraging and transportation (Berman et al., 2011), where the reconfiguration of formations allows diverse functions within the same group.
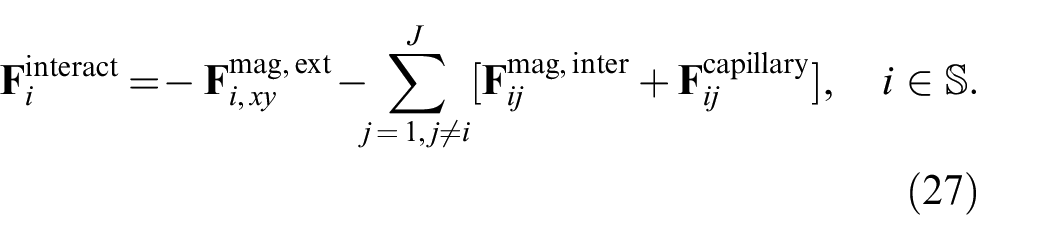
Inspired by such behaviors, in Figure 13, we demonstrated cooperatively manipulating and transporting single and multiple objects in different shapes via “pushing,”“grasping,” and “caging” (Extension 5) manipulation strategies using the same collective magnetic microrobots. The applied 2D manipulation forces and torques from collective magnetic microrobots depend on the formation and the object being manipulated, which are modeled by


where
When microrobots and objects are moving at a constant speed, the manipulation forces on the object are given by
By reconfiguring specific formations on demand, the collective magnetic microrobots can exert distributed forces and torques on the manipulated objects, thus allowing them to complete different tasks for an optimal performance.
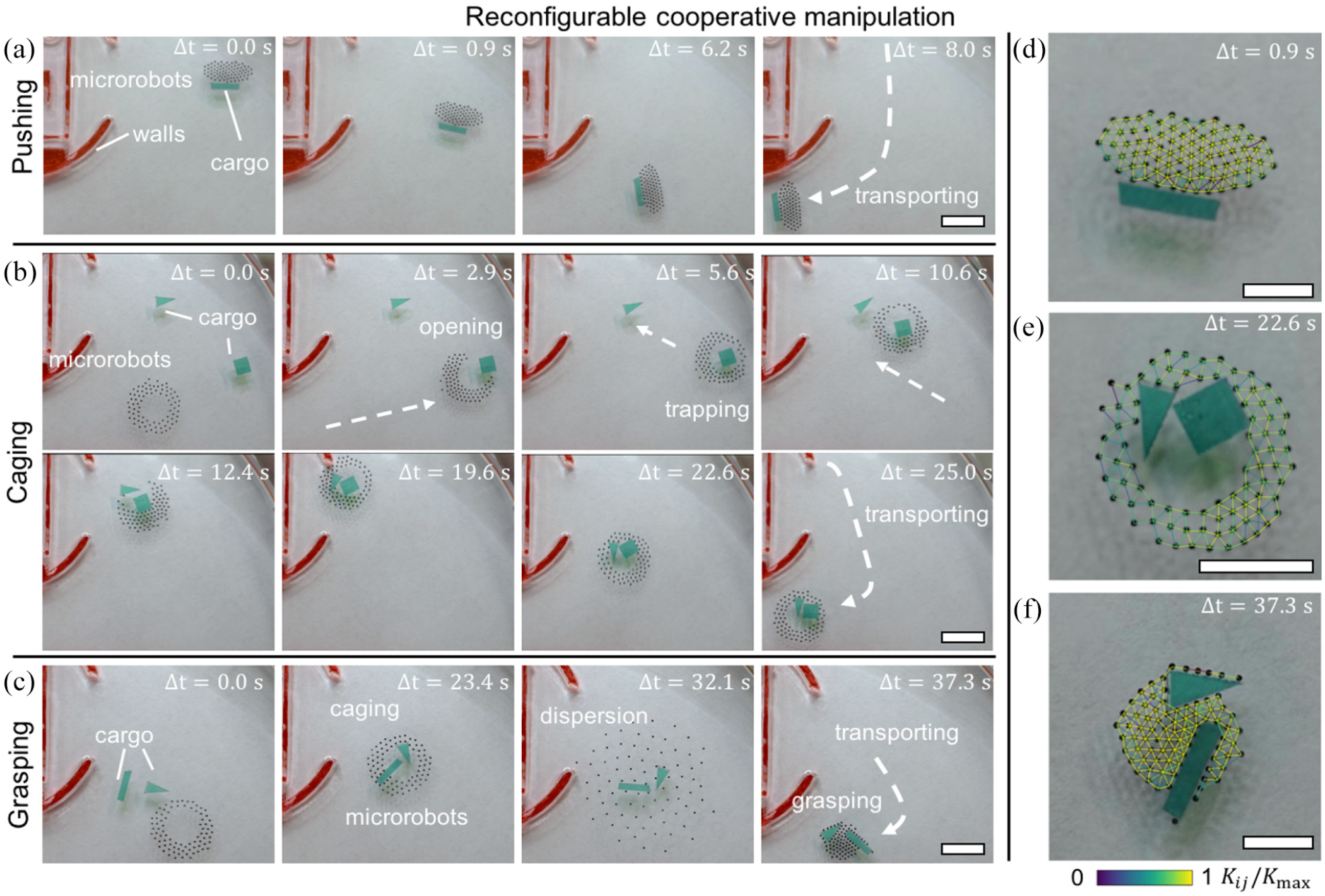
Demonstrations of reconfigurable cooperative manipulation functions of a magnetic microrobotic swarm. (a) Video (Extension 5) snapshots show collective transportation of an object in a long rectangular shape by 82 magnetic microrobots pushing in an ellipse-shaped formation. (b) Video (Extension 5) snapshots show collective transportation of multiple objects by 82 magnetic microrobots caging in a ring-shaped formation. (c) Video (Extension 5) snapshots show reliable grasping and transportation of multiple objects by 82 magnetic microrobots in a disk-shaped formation. (d)–(f) The inter-modular stiffness of 82 magnetic microrobots while transporting objects using “pushing” (d), “caging” (e), and “grasping” (f). Colored segments connecting magnetic microrobots in (d)–(f) indicate normalized inter-modular stiffness (six-nearest-neighbor connections are selected within a
As shown in Figure 13(a), with an ellipse-shaped formation, the magnetic microrobots could uniformly and cooperatively push a long rectangular object and transport it to a desired location. The inter-modular stiffness of the formation was kept relatively high allowing the collective microrobots maintaining the formation while transporting objects (Figure 13(d)). After that, the same collective magnetic microrobots further transformed into a circular and more compliant formation, and adjusted the opening and closing states of the formation to trap and transport multiple objects gently and simultaneously (Figure 13(b) and (e)). Sequentially transforming into circular and disk-shaped formations was then employed for demonstrating tight grasping of multiple objects with force closures (Figure 13(c)). In this task, caging was first used to surround the targeted objects so that magnetic microrobots could disperse uniformly around the target objects. Then, a disk-shaped formation was engaged to aggregate magnetic microrobots so that they could grasp objects in diverse shapes compactly and reliably as shown in Figure 13(f). The grasping forces applied on the objects at static states are difficult to be experimentally measured but can be estimated using (27), as shown in Figure 14. The maximal applied grasping force applied by a microrobot in contact was estimated to be about 0.2
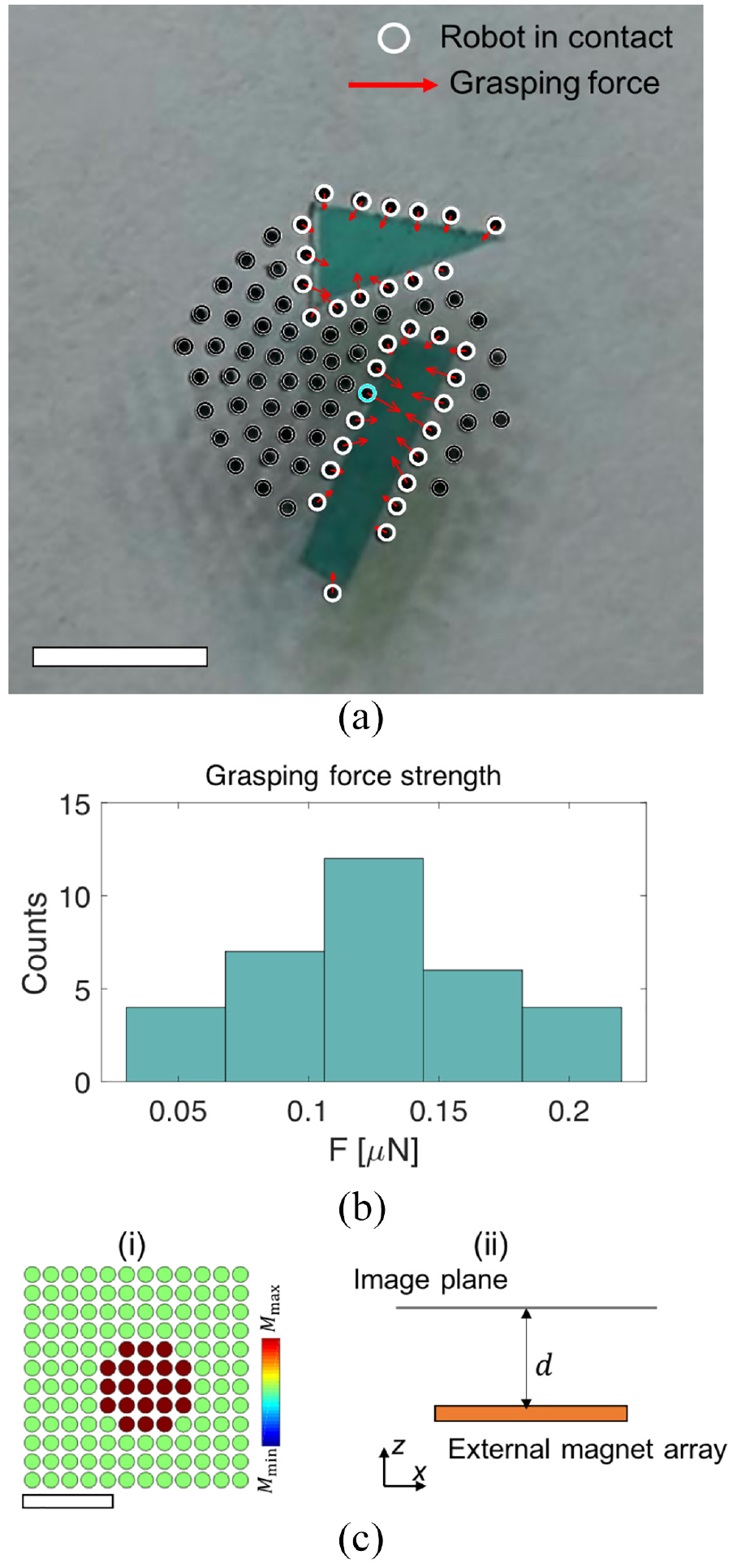
Analysis of the grasping forces by a magnetic microrobotic swarm. (a) Estimated grasping forces applied on the manipulated objects at a static state. Microrobots (33 out of 82) in contact with objects are marked as white circles whereas other microrobots are marked as black circles. The red arrows represent the estimated grasping forces. The microrobot exerting the maximal force (~0.2
The cooperative manipulation by collective magnetic microrobots in different formations allow higher forces and torques and more efficiency compared with single robots. Moreover, the ability of reconfiguring formations with different morphologies and stiffness further enhanced the functionality of these collective magnetic microrobots for diverse tasks.
7. Conclusion and discussion
In summary, this article has presented a generic methodology to program 2D collective static and time-varying formations of collective magnetic microrobots, as well as control their cooperative behaviors. This work demonstrated such a concept on submillimeter ferromagnetic microrobots at the air–water interface by programming external ferromagnet arrays. Despite the simplicity of the demonstrated system, remarkable programmability and reconfigurability have been shown using the proposed methodology. In our demonstrations, although the individual magnetic moment and position of each ferromagnet in an external magnet array cannot vary on-site, we showed that the magnetic potential energy landscape can indeed be varied spatially and temporally by controlling the rigid-body motions of external magnet arrays. Moreover, for formation on 2D solid surfaces, a large uniform magnetic field can be applied to align magnetic microrobots in addition to that produced by the designed external magnets, as the formation only depends on the spatial gradient of external magnetic field (see Appendix B for preliminary results).
Potential limitation of the proposed method is the relatively short actuation range (<10 mm). The proposed system can be potentially used for bio-medical applications where a short actuation range is allowed. To increase the actuation range, stronger external magnets, for example, using superconducting materials (Cao et al., 2018) with efficient cooling in the extreme case, must be used for applications requiring a larger actuation range (>10 mm).
In addition to robotic applications, the proposed method and system can be potentially used for manufacturing, such as efficient 2D contactless material assembly (Tasoglu et al., 2014). Furthermore, the physical modular interaction in the collective system allows emulating animal-like behaviors, which may be helpful for researchers to use it as a platform to study swarm systems and animal behaviors (Sumpter, 2010) at small scales.
As future research directions, collective formations at the air–water interface and on 2D solid surfaces for specific applications will be explored. In addition, 3D formation is extremely challenging but may also open up new opportunities for wider applications. There are two critical challenges preventing creating 3D formations among collective magnetic microrobots. First, it is impossible to control ferromagnetic robots in 3D in an open-loop stable manner, according to the Earnshaw’s theorem. Instead, feedback control of collective magnetic microrobots in 3D are required to stabilize their 3D positions. Second, it is challenging to create self-repelling effects among magnetic microrobots in three dimensions, as the omnidirectional magnetic repulsion in 2D cases is no longer applicable in 3D cases. One possible direction is to explore other types of physical constraints to enable omnirepulsion of individual magnetic microrobots in 3D, such as using electrostatic double-layer forces, while controlling time-varying 3D potential energy landscapes with feedback control.
Footnotes
Appendix A. Index to multimedia extensions
Archives of IJRR multimedia extensions published prior to 2014 can be found at http://www.ijrr.org, after 2014 all videos are available on the IJRR YouTube channel at http://www.youtube.com/user/ijrrmultimedia
Collective formation. The variables
Bio-inspired collective motion.
Soft-body-like collective navigation.
Reconfiguration of formation.
Reconfigurable cooperative manipulation.
Appendix B. Preliminary results of formations on solid surfaces
Programmable formation of collective magnetic microrobots is potentially achievable on 2D solid surfaces. Compared with the air–water interface, solid substrates can still balance the magnetic pulling force in the
In Figure 16(a) and (b) we compare the simulated external magnetic force distributions when applying and not applying a large DC magnetic field, respectively. The simulated magnetic force distributions on the 2D substrate assume that the external DC magnetic field is dominant over inter-modular magnetic fields so that the magnetic moments of microrobots align vertically with a small deviation. The simulation result shows that with an added high DC magnetic field along the negative
For a proof of concept, we experimentally created a ring-shaped formation (Figure 16(c)) on a 2D substrate (Teflon) using a designed external magnet. An extra external DC magnetic field about −10 mT, across an area of
Appendix C. Assembled external magnets
The assembled external magnets used in the experiments are shown in Figure 17.
Acknowledgements
We thank W. Wang for helping characterize the contact angles of magnetic microrobots and A. C. Karacakol for helping characterize the magnetization of magnetic microrobots.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Max Planck Society. M.S. is also partially supported by the NSF, National Robotics Initiative program (grant number NRI-1317477).