
Abstract
The complex paddy field environments of Southern China characterized by fragmented plots and heavy, moist, and soft soils pose a severe challenge to the adaptability of agricultural machinery, representing a key bottleneck to enhancing the quality and efficiency of regional rice production. This study systematically reviews the current state of agricultural machinery in these paddy fields, with a focus on comparing the performance of wheeled and tracked chassis during key operations like tillage, transplanting, and harvesting. A significant performance trade-off is identified: tracked machinery exhibits superior trafficability and stability on soft, wet surfaces, whereas wheeled equipment offers advantages in maneuverability and cost-effectiveness. However, current equipment faces three core challenges: functional specialization, potential for crop root damage during operation, and a decoupling of machinery and agronomy. Prospectively, the development of intelligent paddy field equipment should focus on three key directions: the platformization and universalization of chassis design, minimizing disturbance to the crop's entire life cycle, and deepening the systemic integration of machinery and agronomy. Such advancements will promote the coordinated development of agricultural equipment and the paddy field ecosystem, ensuring the sustainability of regional food production.
Keywords
Introduction
China features a vast geographical expanse, diverse climatic zones, and highly heterogeneous soil types. According to the Chinese Soil Taxonomy and the international FAO World Reference Base for Soil Resources (WRB),1,2 a total of 12 soil orders, 25 suborders, 46 great soil groups, 79 subgroups, 177 soil families, and 437 soil series have been identified. The predominant soil types in southern China include Ultisols (red soils), Alfisols (yellow soils), Plinthosols (lateritic red soils), and Acrisols (ferralitic red soils). 3 These soils are generally acidic, have heavy textures, and contain low levels of organic matter.4,5 However, long-term cultivation and management have led to the development of fertile paddy soils. 6 Figure 1 illustrates the topographical characteristics of the study area, where panels (a), (b), and (c) depict the basin, plain, and hilly regions, respectively, paddy fields in southern China are primarily distributed across the middle and lower reaches of the Yangtze River Plain, the Pearl River Basin, the Jiangnan Hills, the Sichuan Basin, and the Yunnan–Guangxi Hills. 7 These areas span major rice-producing provinces such as Hunan, Jiangxi, Guangdong, Guangxi, Fujian, Chongqing, Guizhou, and Sichuan. 8 Moreover, the total area of paddy cultivation has continued to increase since 2000. 9 These regions are predominantly characterized by a humid subtropical or monsoonal climate. 10 Annual precipitation ranges from 1000 to 2000 mm, and accumulated temperature is relatively high. These climatic conditions are suitable for intensive rice cropping systems involving single, double, or even triple harvests per year. 11 Therefore, the paddy fields in southern China represent the most productive rice-growing areas in the country. They are also among the regions with the highest agricultural production intensity. Most paddy fields in southern China are classified as paddy soils, which are characterized by high clay content, elevated moisture levels, low permeability, and limited soil bearing capacity. 12 These fields are often located in transitional zones between hills and mountains or in alluvial plains, featuring fragmented topography, 13 complex irrigation and drainage systems, humid and rainy climates, highly variable field conditions, and small, irregularly shaped plots.

Through long-term rice cultivation practices, paddy fields have become the most representative farming system in East Asia, gradually evolving into an integrated agricultural production system centered on the close coupling of water management, soil properties, and rice growth.15,16 Archaeological evidence indicates that rice cultivation remains have been discovered at ancient cultural sites in China, such as Hemudu and Pengtoushan, dating back approximately 7000 years. This suggests that the region is among the earliest in the world to have developed paddy rice agriculture. 17 Traditional paddy cultivation in China relied heavily on manual labor and animal power for an extended period. The primary tools included wooden hoes, stone spades, and cattle-drawn plows and harrows. Key agricultural tasks such as transplanting and harvesting were carried out manually, supporting basic subsistence farming activities. Starting from the Spring and Autumn period, iron tools gradually replaced stone and wooden implements, and cattle-based tillage systems became widespread, significantly improving cultivation efficiency. Since the beginning of the twentieth century, with the acceleration of agricultural modernization, the level of mechanization in paddy fields has steadily improved, gradually replacing traditional labor- and animal-based farming practices. 18 Early mechanization in southern paddy fields primarily involved lightweight agricultural machinery such as human-drawn iron plows, walking tractors, and small-scale threshers. Although these machines partially improved operational efficiency, their performance was constrained by uneven terrain, heavy clay soils, and low soil bearing capacity. In practical use, these machines frequently encountered problems such as becoming stuck, slipping, and compacting the plow layer, which severely affected operational continuity and field structure. 19 Since the 1970s, influenced by technological developments in countries such as Japan and South Korea, tracked rice transplanters, half-feed harvesters, and small rotary tillers have been gradually adopted in the hilly regions of southern China. 20 These machines are characterized by low ground pressure, enhanced maneuverability, and compact dimensions, which have enabled them to gradually meet the operational requirements of fragmented, small-scale, and high-moisture paddy fields in southern China.
Mechanization is a critical means of improving agricultural productivity, and for paddy field operations, the advancement of mechanization is essential for ensuring increased rice yields. Moreover, the optimization of agricultural machinery has a direct and significant impact on paddy soil quality. Studies have shown that improvements in soil environmental quality can effectively promote increases in rice yield. Conversely, degradation of soil environmental quality leads to inhibited growth and development of rice plants, which subsequently results in yield reduction. To address the long-standing challenge of mechanization difficulties in southern China, the government has introduced a series of policies in recent years aimed at promoting adaptive innovation in agricultural machinery and restructuring of agricultural machinery systems. For example, the “14th Five-Year Plan for Agricultural Mechanization” explicitly proposes promoting the development and pilot deployment of “site- and machinery-adapted” agricultural machinery; while the “Action Plan for Agricultural machinery Promotion in Hilly Areas (2021–2025)” specifically emphasizes breakthroughs in mechanization for hilly terrains, degraded fields, and fragmented plots. Meanwhile, the government has increased financial and technological investments in areas such as agricultural machinery purchase subsidies, promotion of green and low-carbon agricultural machinery, and the development of intelligent integrated operation systems, facilitating the accelerated implementation of technological pathways including tracked machinery, wheeled-tracked hybrid systems, lightweight designs, and intelligent control systems. The purpose of this paper is to provide a comprehensive review of existing literature on technologies related to tracked and wheeled machinery operations in southern paddy fields, focusing on improving soil environmental quality and enhancing agricultural machinery adaptability. This paper is organized based on the following aspects. First, Section 2 presents the differences, characteristics, and current development status of wheeled and tracked systems. It also discusses the negative impacts of agricultural machinery on soil. In Section 3, a comparative analysis of machinery used in different operational stages is provided, highlighting their respective advantages and disadvantages. This section also summarizes advanced technologies and strategies for improving equipment versatility and mitigating soil degradation. Section 4 reviews the current research progress on novel wheel–track hybrid locomotion systems, which show great potential for future application in agricultural machinery. Finally, Section 5 offers recommendations for the future development of mechanized operations in paddy fields.
Paddy field mechanization: Impacts of wheeled and tracked systems
Wet soil challenges to machinery mobility
Southern paddy fields are primarily characterized by paddy soil as the dominant soil type, which is formed under prolonged conditions of artificial flooding and cultivation. The hydro-physical properties directly determine whether machinery can operate efficiently. These properties constitute a key limiting factor for mechanization in southern paddy fields. In the southern region, high annual precipitation, elevated evaporation rates, and a humid climate cause paddy fields to be maintained under continuous flooding or inundation management. Furthermore, drainage systems predominantly exist as field dikes and channels, resulting in fields often remaining in saturated or semi-saturated moisture conditions during the operational window.21,22 As shown in Figure 2, under these conditions, the surface layer of paddy soil exhibits a high water retention capacity, with moisture content reaching 40%–60%. The subsoil, specifically the plow pan formed by repeated tillage, further restricts water infiltration.23–26 To accurately predict machinery mobility in such complex environments, the theoretical framework of soil-machine interaction has evolved significantly. While traditional empirical models, such as the Bekker pressure-sinkage theory, provide a foundational understanding, they often fail to capture the complex rheological behavior of saturated paddy soils which exhibit both viscosity and plasticity. 27 Recent studies have increasingly shifted towards computational numerical simulations to address this limitation. For instance, the Discrete Element Method (DEM) coupled with Computational Fluid Dynamics has been extensively applied to model the dynamic interaction between track lugs and mud fluids.28–30 Furthermore, Smoothed Particle Hydrodynamics methods have shown superior accuracy in simulating large-deformation mud splashing and deep sinkage phenomena compared to Finite Element Methods (FEM). 31 These advanced simulation tools enable more precise optimization of chassis tractive performance by visualizing the microscopic force chains within the soil matrix, marking a paradigm shift from empirical estimation to digital-twin-based design.

Under wet conditions, two main operational challenges exist: first, wheeled machinery is prone to slip or bogging in saturated fields, which not only increases tractive resistance but also leads to higher fuel consumption. After rainfall, the field surface rewets quickly. As a result, it takes longer for the soil to return to workable conditions. This shortens the operational window. The soil bearing capacity of paddy soil is influenced by moisture content, soil compaction, and soil structure.32–34 When soil moisture exceeds 50%, the bearing capacity drops below 20 kPa. Conventional wheeled machinery exerts 30–50 kPa of pressure. This far exceeds the soil's limit and causes machinery bogging and operational failure. In contrast, tracked machinery increases the ground contact area, 35 thereby controlling the ground contact pressure between 10 and 20 kPa, making it more suitable for the soft soils of southern paddy fields. However, its terrain trafficability remains influenced by field surface conditions, such as thick mud and uneven plow pan, which can still cause tracked machinery to experience track slip or mud adhesion phenomena,36,37 thereby increasing equipment wear.
Paddy soil has fine texture and saturated porosity. During field operations, it significantly reduces the coefficient of friction between agricultural implements and the ground. The static coefficient of friction between wheeled machinery and soil can drop from 0.6 to below 0.3 during operation. This effect is especially pronounced in high-traction stages such as rotary tillage, transplanting, and harvesting, where slip ratio increases significantly Tracked systems increase ground contact area, reducing ground contact pressure. This enhances traction and reduces slip. 36 In contrast, wheeled vehicles have smaller contact areas. They are more prone to slipping, especially on soft or sloped terrain. 38
In addition, the adhesive layer effect between the tire or track and the water-saturated mud increases mud adhesion. This accelerates wear and reduces transmission efficiency. As shown in Figure 3, the paddy soil in southern regions has poor deformation recovery after compression. Compressed zones are prone to forming soil indentations, wheel track marks, and compacted areas.39,40 The spatial distribution of soil microbes and crop roots significantly affects water and nutrient uptake, ultimately impacting crop yield.41–43 The dynamic load from tracked machinery can penetrate to a depth of at least 30 cm. 44 Compaction reduces the living space of soil biota.45–47 It hinders crop growth and suppresses both root and shoot development.48,49 These effects eventually lead to reductions in both yield and quality.50,51 Even under well-drained conditions, it may take several days or more for the soil to return to a workable state. This further shortens the available time for agricultural machinery operations. 52

Effects of compaction on soil and soil biota.
Current status of typical wheeled and tracked machinery operations
Based on the working types of running mechanisms of typical agricultural implements used in paddy fields, they can be classified into two categories.
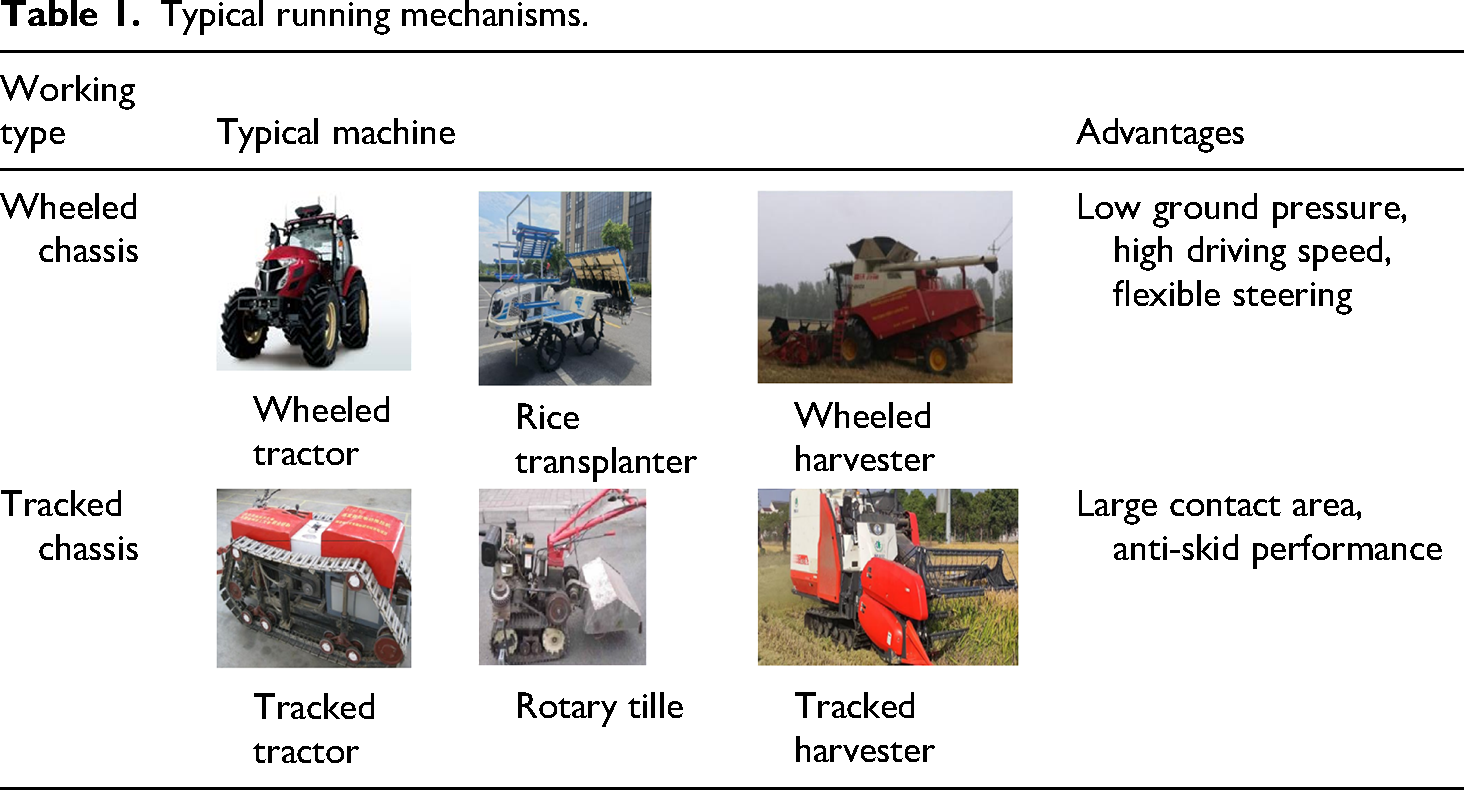
The first type of chassis is the wheeled machinery. Wheeled machinery are suitable for hard terrains due to low ground contact pressure, high travel speed, and flexible steering. The second type is the tracked machinery. Tracked machinery increase the contact area between the agricultural machinery and the ground, making them suitable for soft soils. They provide better adhesion and traction, effectively preventing slip. Additionally, the tracked structure better distributes the agricultural machinery weight. The two typical types of running mechanisms are shown in Table 1.
Typical running mechanisms.
Different typical terrains can be traversed by using corresponding adaptive mechanisms. This can improve work efficiency. As shown in Figure 4, on hard and dry terrain, the wheeled chassis can quickly complete tasks due to its low ground contact pressure and high travel speed, thus improving work efficiency. In contrast, in muddy and slippery paddy field environments, the tracked chassis exhibits better stability and trafficability, owing to its larger ground contact area and superior adhesion, ensuring operational stability and continuity. Therefore, selecting the appropriate type of running mechanism based on the working terrain is key to improving the operational efficiency of agricultural machinery in paddy fields.
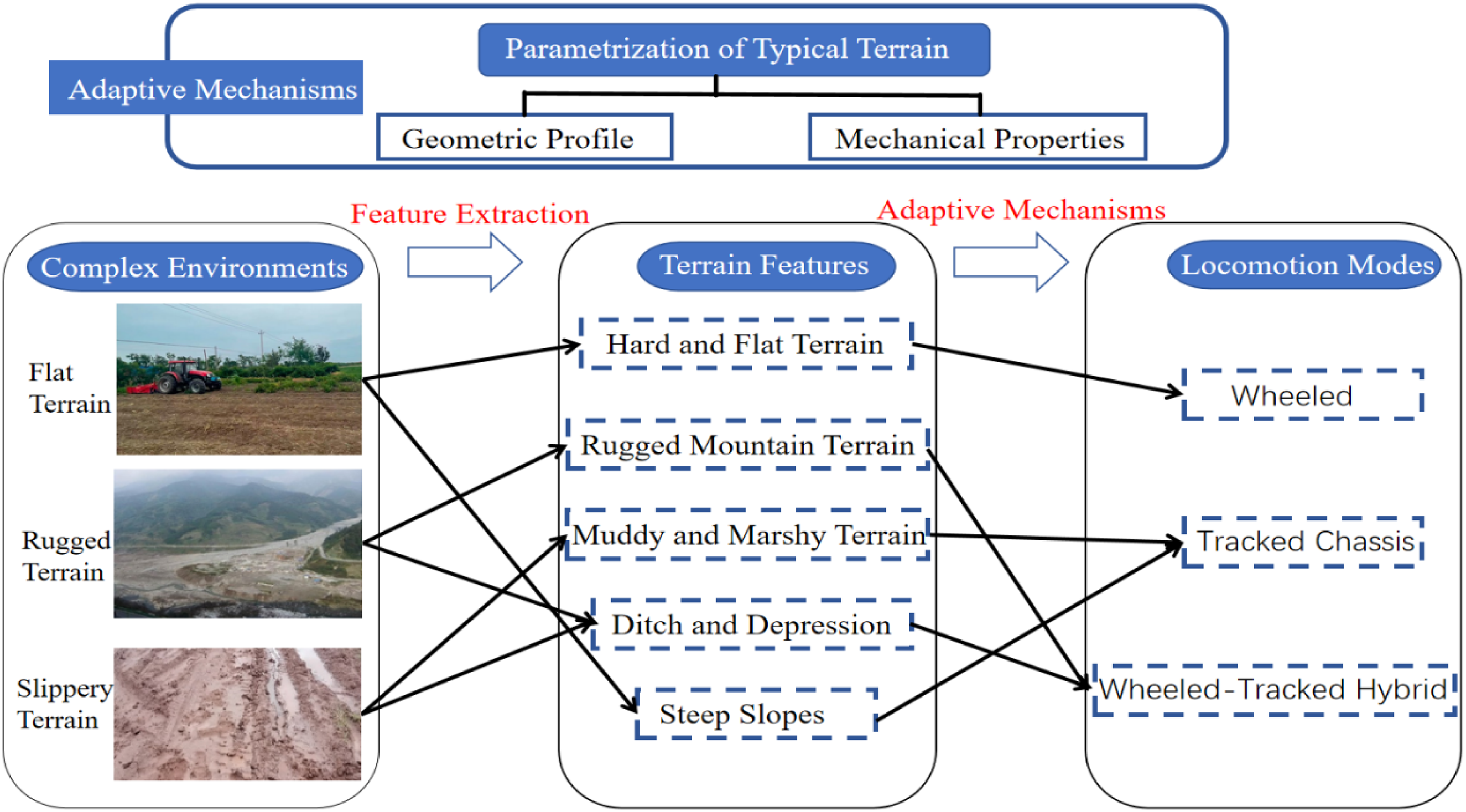
Adaptive mechanisms for typical terrains.
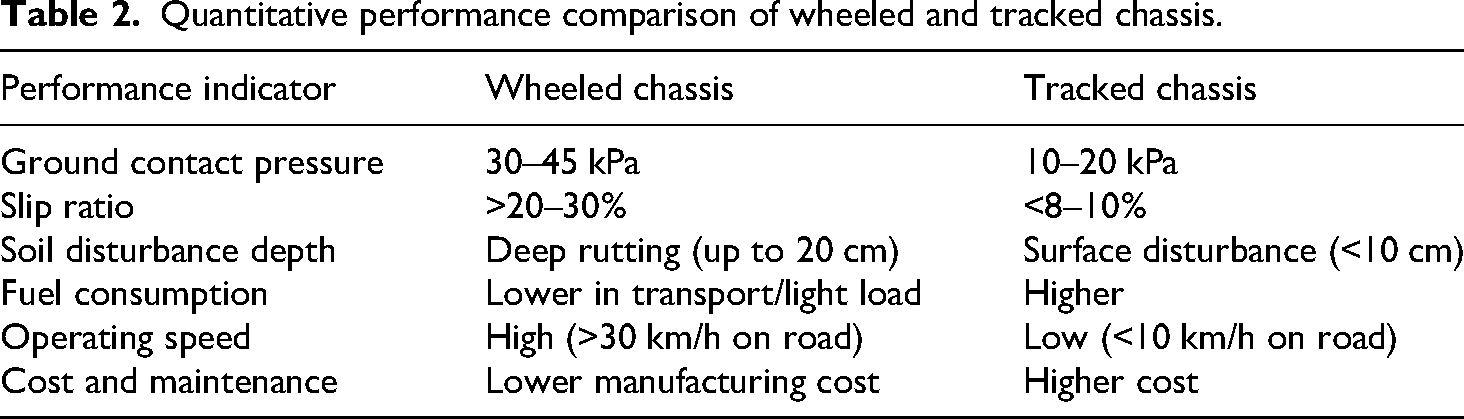
To provide a more rigorous analysis of the operational trade-offs between these two dominant chassis types, Table 2 presents a quantitative comparison of key performance indicators based on recent empirical studies.25,28 As the data indicates, a significant performance dichotomy exists: while wheeled chassis offer superior mobility (operating speeds > 30 km/h) and cost-effectiveness for road transport, their high ground contact pressure (30–45 kPa) significantly exceeds the bearing capacity of saturated paddy soil (< 20 kPa), leading to deep rutting and potential plow pan damage. In contrast, tracked systems reduce ground pressure by approximately 35–62% and maintain a slip ratio below 10% in muddy conditions, thereby ensuring operational continuity at the expense of higher fuel consumption and maintenance complexity during non-field transport.
Quantitative performance comparison of wheeled and tracked chassis.
Wheeled mobile mechanism
Wheeled locomotion systems are among the most widely adopted and thoroughly studied locomotion types. A relatively mature theoretical framework has been established in terms of structural design, dynamic modeling, and adaptive control. Based on wheel structural configurations, wheeled mechanisms can be classified into five primary types: rigid wheels, elastic wheels, omnidirectional wheels, planetary wheels, and variable-diameter wheels. As shown in the Table 3, rigid wheels refer to wheels that make rigid contact with the ground during motion on hard surfaces. Since such contact is generally not allowed in daily ground conditions, rigid wheels are mostly suitable for soft terrain, such as lunar regolith or deserts on Earth. Therefore, they are commonly used in planetary exploration robots. Elastic wheels consist of an elastic layer made by wrapping elastic materials (e.g. rubber) around a rigid hub, often filled with compressed air. The wheel and hub are connected via a spoke structure or in some cases are solid (non-pneumatic). Elastic wheels are typically used in agricultural machinery and passenger vehicles. Omnidirectional locomotion mechanisms enable full-motion mobility with three degrees of freedom on a plane, offering high maneuverability and simple control. However, due to the large number of motors, complex structure, high cost, and heavy weight, they are mainly applied in space-constrained environments requiring high-precision positioning. Planetary wheels can switch between planar movement and obstacle-climbing modes without auxiliary mechanisms. They offer high efficiency, stability, and operational simplicity when traversing uneven terrain. Variable-diameter wheels are defined by their ability to actively change their radius through special mechanisms or structural transformations. This makes them suitable for navigating complex and dynamic terrain where high terrain adaptability is required.
Typical running mechanisms.

Wheeled agricultural machinery utilizes tire-based running devices as its core mobility system. 56 Agricultural tires are classified as a type of elastic wheel. This type of machinery is suitable for operation in farmlands with high soil firmness and relatively flat terrain, such as plains, gentle slopes, and hardened large-scale cultivation areas. It uses wide tires or low-pressure tire designs. These significantly reduce the load impact on farmland soil. The machinery is suitable for dry or mildly moist hard surfaces. In soft and muddy areas such as southern paddy fields, high-tread slip-resistant tires need to be replaced to improve traction.
As shown in Table 4, according to the national standard classification of agricultural tire tread types, common tread patterns are divided into five categories: 57 R-1/R-1 W (agricultural) tires, R-2 (paddy field) tires, R-3 (turf) tires, R-4 (industrial) tires, and multi-purpose tires. The five types of tires differ mainly in their tread patterns, which correspond to different application environments. For example, R-1/R-1 W tires perform reliably on soft and uneven terrain. R-2 tires are specifically designed for extremely wet conditions. R-3 tires are suitable for soft surfaces such as turf, grassland, or forage crop fields. R-4 tires perform well on hard surfaces such as asphalt and concrete. Multi-purpose tires demonstrate broad adaptability across various operational environments. In typical southern paddy fields—such as muddy fields, deepwater paddies, and plots lacking timely drainage—wheeled machinery often suffers from severe sinking due to excessive ground contact pressure. When the soil moisture content exceeds 50%, the sinking depth may reach up to 20 cm. The increased slip ratio significantly reduces traction efficiency and frequently interrupts operations. 58 Limited trafficability, caused by the structural limitations of the tires, makes it difficult to cross ridges or navigate water channels. Repeated rolling leads to soil compaction, which impairs aeration and drainage, 59 ultimately hindering the development of crop root systems in subsequent growth stages. 60
Common agricultural tire tread patterns.

By modifying the shape, area, and depth of the tire tread pattern, operational stability can be enhanced, slippage reduced, and service life extended. 63 Zeng et al. 64 found that the contact imprint shape of patterned tires was nearly identical to that of smooth-tread tires. However, the presence of tread blocks significantly increased the contact pressure and introduced greater non-uniformity in its distribution. The difference between symmetric and asymmetric tread designs had minimal effect on the contact pressure values. Amirul Hakim et al. 65 found through finite element analysis that a larger contact area allows forces to be distributed more effectively within the tire structure. This improves contact performance and overall stability. High-intensity contact stress may indicate more effective engagement, while widely distributed stress contributes to enhanced driving stability. Li S et al. 66 fabricated three types of tread blocks using high-abrasion and flexure-resistant rubber materials. These blocks were embedded into soil and subjected to pure sliding tests. Numerical simulations using the Coupled Eulerian Lagrangian method were conducted to validate the experimental results. The herringbone tread structure was found to provide greater traction during operation due to its larger contact area and significant depth. Under equal vertical penetration, it exhibited the highest stress and generated the largest horizontal force during pure sliding. Phromjan J et al. 67 proposed the use of non-pneumatic tires (NPT) in agricultural machinery to reduce soil compaction, based on a combination of empirical models and the FEM. However, experimental results showed that both original and spoke-reduced NPT increased soil sink age and bulk density compared to pneumatic tires.
Tracked locomotion mechanism
Tracked agricultural machinery is characterized by the use of a tracked locomotion mechanism as its core component. 68 Its key feature lies in increasing the contact area with the ground, thereby reducing ground contact pressure and enhancing trafficability on soft soils or complex terrains. 69 In muddy, uneven, or slippery environments—such as paddy fields—wheeled machinery is prone to bogging, while tracked machinery demonstrates superior adaptability.
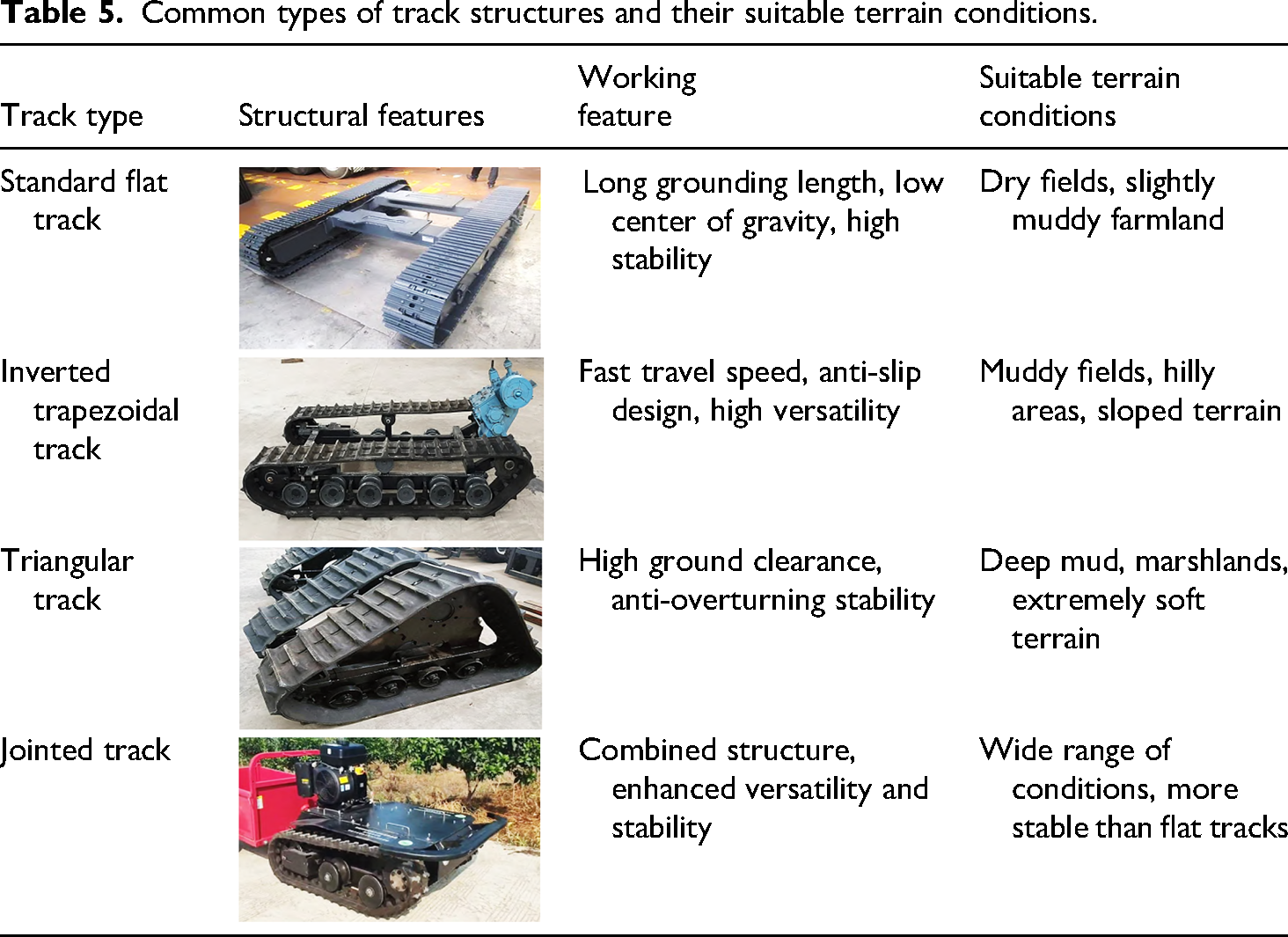
Moreover, tracked machinery typically provides greater traction than wheeled machinery of equivalent power. This makes it more advantageous in operations requiring high tractive force, while also offering enhanced trafficability and operational stability. Compared with conventional wheeled agricultural machinery, Tracked designs offer better protection of soil structure and reduce compaction damage. They are also better suited for field operations such as tillage, seeding, harvesting, and transportation under complex terrain conditions. As shown in Table 5, common types of tracks can be classified into four categories based on their application and versatility: standard flat tracks, inverted trapezoidal tracks, triangular tracks, and jointed tracks. The four types of track structures are applied in distinct terrain conditions. For example, standard flat tracks offer a long ground contact length and low center of gravity, providing good stability. They are suitable for dry fields or slightly muddy conditions. Inverted trapezoidal tracks are characterized by higher travel speeds and strong versatility. They are designed to prevent slippage in muddy fields, hilly areas, or sloped terrains. Triangular tracks provide greater ground clearance and enhanced stability, which helps prevent overturning. They are suitable for extremely soft environments such as deep mud and marshlands. Hybrid tracks offer better versatility than inverted trapezoidal tracks and greater stability than standard flat tracks, making them applicable across a wider range of operational scenarios.
Common types of track structures and their suitable terrain conditions.
In further classification, track systems can be divided into two major categories based on their material properties: metal track systems and rubber track systems. Metal track systems are primarily composed of steel components. 70 They are characterized by high rigidity, high strength, and a superior load-bearing capacity. Their traction performance can exceed that of conventional rubber track systems by more than 1.5 times. However, metal track systems exhibit greater soil disturbance in soft soil conditions. Therefore, they are more suitable for hard terrains such as gravel and mountainous areas. Rubber track systems are composed of rubber combined with metal or fiber composite materials. 71 They exhibit lower ground contact pressure, which helps reduce soil compaction effects. Additionally, they generate less vibration and have a lighter weight. Furthermore, rubber track systems exhibit lower rolling resistance compared to metal track systems. Their superior maneuverability makes them ideal for sensitive terrains such as paddy fields, snowy areas, and orchards, where surface protection is critical.
Modifying track area, material, and height enhances operational stability, traction performance, and soil protection while mitigating slipping and degradation in tracked chassis. Zabavnikov N.A. et al. 72 found that the geometric shape of the contact surface between tracked vehicles and soil significantly affects traction force. Traction can be maximized by optimizing the geometric profile of the contact surface. Marsili A. et al. 70 found that the soil compaction effect of metal track tractors is less severe than that of rubber track tractors. The pressure distribution along the track length is a key factor influencing soil compaction. Due to its structural characteristics, rubber tracks generate greater settlement at the support wheel positions, resulting in localized pressure concentration. In contrast, metal tracks exhibit a more uniform pressure distribution. Li, Junzheng et al. 73 observed that under varying soil moisture conditions in paddy soils, the thrust exhibited a regular wave-like increase with rising soil moisture at different track shoe heights. The rolling resistance showed similar trends with changes in track shoe height across different moisture levels. Higher track shoes provided better traction performance under varying moisture conditions. To improve the trajectory tracking accuracy and stability of tracked chassis in complex and slip-prone farmland environments, Lu, E et al. 74 proposed a comprehensive control strategy combining Adaptive Back stepping Control and a Soft-Switching Sliding Mode Observer. To reduce the risk of soil compaction caused by steering in paddy fields, Tang, Z et al. 75 developed a reversible steering transmission for tracked combine harvesters. This transmission enables three steering modes: straight driving, single-side braking, and in-place turning with zero soil accumulation.
Although tracked agricultural machinery offers advantages in certain aspects, it also presents several limitations. For example, its manufacturing cost is generally higher than that of wheeled machinery, and maintenance procedures are relatively more complex. In addition, track wear becomes significant when operating on hard surfaces. Therefore, in practical applications, various factors must be comprehensively considered based on the specific operational environment and task requirements to select appropriate agricultural machinery.
Comparison of wheeled and tracked machinery across different operational stages
As shown in Figure 5, the operation process in southern paddy fields is mainly divided into four core stages: land preparation (a), seedling cultivation and transplanting (b), field management (c), and harvesting with threshing (d).76–79 These key stages directly affect the yield and quality of rice in the following season. To improve production efficiency and reduce soil degradation, extensive efforts have been devoted to optimizing various agricultural implements.

Operation process of southern paddy fields.
Due to variations in operational scenarios, load intensity, and field surface conditions, the performance requirements for agricultural machinery differ significantly, leading to distinct market preferences for wheeled and tracked chassis. In the general Chinese agricultural tractor market, wheeled chassis currently hold a dominant share of approximately 80–90% of the total stock, due to their cost-effectiveness and superior road versatility. However, a dramatic shift occurs within the specific context of southern paddy fields due to the imperative of preventing bogging. Notably, in the harvesting sector, tracked combine harvesters have achieved a market share exceeding 70%, becoming the standard configuration for wet-season operations, while in the transplanting sector, tracked versions are rapidly emerging with a compound annual growth rate of approximately 13% to address deep-mud challenges.
Land preparation
Land preparation is the primary operation stage in paddy field production, typically involving plowing, rotary tillage, stubble removal, and leveling. 78 Mechanical land preparation is performed in shallowly flooded paddy fields using rotary tillers. The rapidly rotating blades pulverize soil, rice stubble, and weeds, creating a fine mud layer. 80 This process simultaneously achieves soil fragmentation, stubble burial, slurry formation, fertilizer incorporation, and surface leveling. An ideal seedbed characterized by a loose and level surface with a soft muddy layer underneath is thus prepared for subsequent rice transplanting or direct seeding. 81 This stage is typically conducted in late winter to early spring or immediately after the previous crop harvest. High soil moisture content and increased operational resistance characterize this phase. It poses one of the greatest challenges to machinery traction capacity and trafficability.
Performance and limitations of wheeled machinery in land preparation
Wheeled tractors are still the primary equipment for small- and medium-scale farming units in southern regions. This is attributed to their simple structure, flexible steering, and strong road adaptability. However, their adaptability in wet or soft paddy fields is relatively poor. Field studies have shown that the ground contact pressure of wheeled tractors often ranges from 30 to 45 kPa, which significantly exceeds the bearing capacity of paddy soil. 82 When operating under high soil moisture conditions, soil compaction is more likely to occur.83,84 This often results in sinking, causing issues such as plow bouncing and shallow harrowing. Yixin, S. et al. 85 found that appropriately increasing the wheel diameter can enhance chassis trafficability. This improvement reduces wheel sinking in soft soil conditions.
In addition, excessive slip often occurs at the drive wheels of wheeled machinery, 86 which significantly reduces traction efficiency. When operating on high-moisture soils, the slip ratio of wheeled tillage equipment often exceeds 25%. 87 This leads to insufficient traction and increased operational energy consumption. Uneven tillage depth and intensified soil disturbance also occur, which degrade the structure of the cultivated layer. 88
Adaptive advantages and research progress of tracked machinery
In contrast, tracked tillage equipment demonstrates significant advantages under complex field conditions due to its low ground contact pressure, large contact area, and high traction stability. 89 The unit ground contact pressure of tracked rotary tillers on fields with 60% moisture content is reduced. Consequently, the probability of bogging decreases, and the standard deviation of tillage depth is lowered. 90 This indicates that its operational stability in soft and poorly drained fields is significantly superior to that of wheeled machinery. Another advantage of tracked agricultural machinery lies in its tillage depth uniformity and surface leveling control. Tracked machinery demonstrates superior tillage depth consistency compared to wheeled machinery during paddy field rotary tillage operations. Additionally, wheel track marks are shallower, and the field surface recovery period is shorter,91,92 facilitating subsequent transplanting stages.
However, tracked agricultural machinery also presents certain limitations, including heavy weight, operational complexity, and higher fuel consumption. The unit fuel consumption of tracked tractors exceeds that of wheeled tractors, 93 mainly due to track drive resistance and hydraulic system losses. To enhance the mobility of tracked machinery, Hyung-Woo K. et al. 94 employed tracks with variable grouser heights to improve traction on extremely soft and cohesive soils. Additionally, air cushion systems were integrated to partially support vehicle weight, further reducing ground contact pressure. Altab H. et al. 95 found that air cushion systems can support up to 20% of the vehicle's total weight.
Rice transplanting
Rice transplanting is one of the most critical stages in paddy production. It directly influences seedling distribution, survival rate, and yield potential. Mechanized rice transplanting has become a key method in modern paddy farming. Compared to traditional manual transplanting, it offers higher efficiency, 96 and can achieve favorable yields under optimal conditions. In southern China, moist harrowing is commonly used to level the paddy field surface. 97 Additionally, the short crop rotation cycles of double-cropping and triple-cropping rice systems result in a narrow transplanting window. 79 Therefore, mechanized rice transplanting must meet multiple performance criteria, including operational speed, stability, terrain adaptability, and field surface protection. 98
Environmental characteristics of rice transplanting in southern paddy fields
Rice transplanting is typically carried out within 3–5 days after land preparation. During this period, the surface of the paddy field exhibits high moisture content, and the topsoil remains in a puddled or semi-puddled state. 99 In southern rice-growing regions, the topsoil of transplanting fields exhibits high subsidence potential and low shear strength. Wheel pressure from agricultural machinery often leads to soil compaction, deviation bands, and seedling strip tearing. 100 Moreover, due to the prevalence of narrow and small field layouts, the machinery must possess adequate turning radius and field-crossing capability.
Meanwhile, frequent alternation of rainy periods causes rapid rewetting of fields, resulting in fluctuating soil bearing capacity of the soil surface. This significantly narrows the operational window for transplanting. 101 This imposes strict requirements on rice transplanters to perform high-precision, high-speed, and high-quality operations within a limited timeframe.
Adaptability and limitations of wheeled rice transplanters
Wheeled rice transplanters were widely adopted during the early stages of rice mechanization due to their high travel speed, flexible maneuverability, and small turning radius. 95 A typical four-row wheeled high-speed rice transplanter achieves a field capacity of 0.11–0.12 ha/h on well-leveled fields. Its field efficiency ranges from 64% to 70%, making it suitable for fields with firm tillage layers and good drainage. 102
However, the maneuverability and stability of wheeled rice transplanters are limited in uneven or confined areas. Turning angle restrictions reduce turning efficiency at headlands and limit operational flexibility in tight spaces. 103 In high-moisture or heavy, sticky paddy fields, tires often sink or slip. This results in seedling row drift, hole misalignment, and inconsistent planting depth. Liu, H. et al. 104 developed an agricultural electric vehicle with autonomous ultra-tight turning capability. The vehicle features a dual-axle rotary chassis and four-wheel independent drive under coordinated DYC–MPC control. Precise torque distribution enables a minimum turning radius of 1.51 m. The rear wheels strictly follow the front-wheel trajectory to significantly reduce crop damage. At a steering angle of 5°, the trajectory tracking error remains below 0.55%, ensuring limited seedling damage and maintaining driving stability.
Advantages and research progress of tracked rice transplanters
As a critical component of mechanized rice cultivation, tracked rice transplanters offer significant advantages in improving operational efficiency, reducing labor intensity, and adapting to complex paddy field conditions. Recent research has primarily focused on enhancing operational performance, achieving automation, and optimizing the design of key components. Compared with wheeled rice transplanters, tracked transplanters offer stronger adaptability to soil conditions. The track design increases ground contact area and reduces ground contact pressure, enabling stable operation in soft paddy fields, sloped terrains, or uneven surfaces. It effectively prevents bogging and slippage issues.105,106 In addition, tracked rice transplanters typically offer higher operational efficiency and more uniform transplanting quality, which contributes to increased rice yield. Mechanized transplanting can also significantly reduce labor demand, helping to alleviate the problem of rural labor shortages. 107 Jinbo R. et al. 108 investigated the interaction between tracks and paddy soil. They used modeling and simulation to optimize the number and design of track shoes. These optimizations aimed to increase mud ejection efficiency and reduce energy consumption.
Harvesting
Rice harvesting is a critical late-stage operation in the paddy field workflow. It typically occurs after the plants reach physiological maturity. The harvesting period often coincides with the transition between the rainy season and the typhoon season. 109 This timing brings challenges such as frequent rainfall, rapid rewetting of fields, and a narrow operational window.
At this time, the field's soil bearing capacity decreases, and the mud layer becomes thick. Harvesting machinery is prone to bogging down or slipping. This situation places very high demands on the chassis structure and terrain adaptability. This makes the chassis structure and terrain adaptability of rice harvesting machinery critical factors influencing operational efficiency and the successful completion of harvests. The performance differences between wheeled and tracked harvesters during this stage are significant. Consequently, they have become a key focus in research on machinery adaptation to specific field conditions.
Harvesting operational conditions and technical bottlenecks
In the southern rice production regions, the common practice of implementing double or triple cropping systems results in the rice harvesting periods frequently overlapping with the high rainfall phases of the late season, which consequently causes paddy fields to often be in conditions of extremely high moisture and low soil bearing capacity during the harvest phase. 110 During this phase, the typical field conditions are characterized by high saturation in the plow layer, significant slurry thickness, and rapid and persistent re-wetting of the fields, which severely restrict the mobility and operational stability of traditional agricultural machinery. During this phase, typical field conditions include high saturation levels in the plow layer, substantial slurry thickness, and rapid and persistent re-wetting of the fields. These conditions severely restrict the mobility and operational stability of traditional agricultural machinery. In southern rice fields during the autumn harvest phase, the average surface water content often exceeds 65%, and the mud layer thickness can reach 8–12 cm, leading to a significant increase in the incidence of wheel-based machinery getting bogged down. 111
Rice harvesting requires high operational continuity and strict timeliness. On the one hand, the optimal harvesting window for mature rice is extremely short; delays beyond this period often result in grain shattering losses and increased lodging.112–114 On the other hand, frequent rainfall interruptions shorten the operational window, 115 forcing agricultural machinery to ensure high efficiency and timeliness. At this stage, the machinery not only needs to have excellent traction performance and low-pressure passing ability, but also must take into account the operating stability under high load, adaptability to complex terrain and low operating energy consumption. It is precisely because of these multiple and complex requirements that the choice of wheel-track structure becomes one of the key factors affecting harvesting efficiency and operational reliability.
Adaptability and limitations of wheeled harvesters
Wheeled harvesters are widely used in harvesting single-season rice and dryland rice in central my country, southern China and some hilly areas in the south because of their high transfer efficiency, fast driving speed and low purchase cost. Its typical form is a front-wheel drive full-feed wheeled combine harvester, which is capable of high-speed operation and the function of harvesting both rice and wheat.116,117
In high-moisture paddy fields, the risk of wheel-type machinery getting stuck is two to three times higher than that of tracked machinery. This significantly reduces operational continuity and efficiency. Additionally, repeated multi-wheel rolling causes secondary compaction of the tillage layer. This decreases surface permeability, negatively affecting subsequent tillage and reseeding of crops. In recent years, some wheel-type harvesting agricultural machinery has adopted wider tires and low-pressure inflation systems to reduce ground contact pressure. However, their effectiveness remains limited in waterlogged fields after continuous rainy periods. They still struggle to match the adaptability of tracked machinery. Therefore, during the rice harvesting stage in southern China, wheel-type harvesters are more suitable for “hard-field plus short-cycle” dry operations. They are less appropriate for wet, high-load working conditions. Chen, D 118 designed the bionic walking wheel by analyzing the foot structure and movement patterns of wading birds living in swamps and mudflats. The environmental conditions of these birds’ habitats are analogous to the muddy soil in paddy fields. As shown in Figure 6, the wheel features double-row legs arranged in a staggered configuration. This design emulates the walking posture of wading birds by alternating movements of the two legs and coordinating them to enhance operational stability.

Bionic structural design of the toe of a walking wheel.
Based on terramechanics principles, a novel rigid wheel with an arcuate edge profile was designed by Zhe wu et al., 119 demonstrating enhanced driving performance through reduced wheel sink age and optimized soil reaction forces. Drawing inspiration from the surface contour of dairy cattle hooves (Figure 7), a bionic wheel prototype for paddy fields was developed by Xue et al. 120 using the bovine hoof as the biomimetic reference model. This biomimetic design reduced soil adhesion by 18.2% compared to conventional trapezoidal wheels in paddy-field tests.

Rigid wheel with arcuate edge profile.
Adaptive capabilities and evolution pathways of tracked chassis harvesters
Rice (Oryza sativa), as a staple crop in China, is predominantly harvested by tracked chassis harvesters across the majority of paddy fields. 121 The superior terrain adaptability of tracked chassis harvesters is principally attributed to their specialized chassis — the track-type chassis system. Compared with wheeled harvesters, this chassis design provides an enlarged ground contact area, significantly reducing soil pressure distribution by 35–62% according to empirical data. 122 Consequently, tracked chassis harvesters achieve stable operation on waterlogged soils, muddy terrains, and slopes up to 15°, with slip ratios maintained below 8% under these critical conditions. 123
The terrain adaptability advantages of tracked chassis harvesters remain critical for operations under complex field conditions. However, significant mud accumulation on track plates during rainy seasons substantially degrades harvesting efficiency. To address this, a bionic track cleat design inspired by ostrich foot morphology (Figure 8) was developed by Lu et al., 124 incorporating non-smooth surface structures biomimicking the cuticle of dung beetles. The engineered protuberant tread pattern demonstrated superior anti-adhesion and detachment capabilities in waterlogged soils, reducing mud adherence by 41%. Novel track materials and structural designs have been proposed to enhance traction in muddy soils. A steel track system locally manufactured by Shalabey et al. replaced conventional rubber tracks, exhibiting superior performance on compacted soils and undulated terrain. This approach effectively addressed suboptimal maneuverability and limited service life of rubber-based systems. 125

Biomimetic cleat morphology and surface texture inspired by ostrich claws and dung beetle cuticles.
When operating on steep slopes, a multibody dynamics model for tracked chassis combine harvesters was established by Chai et al. 126 using a bidirectional DEM-FMBD coupled simulation approach (Figure 9). This methodology validated various ridge-crossing modes with optimized attitude configurations, significantly reducing dynamic stress to enhance chassis reliability. An attitude-adjustable track-type chassis was developed by Hu et al. 127 for combine harvesters, incorporating a self-leveling system based on four-point linkage mechanisms. This adaptive configuration significantly enhanced vehicular operational performance.
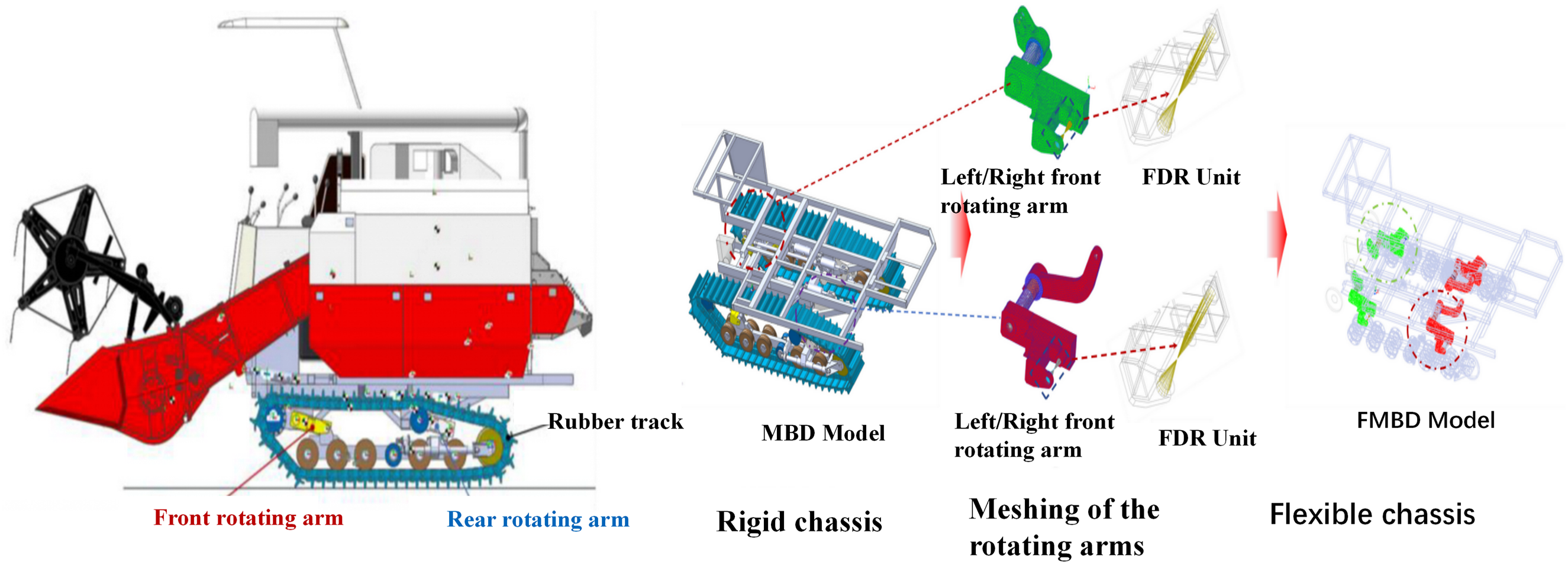
Schematic of MBD model and FMBD attitude-adjustment mechanism for chassis.
Structural innovation and adaptability analysis of reconfigurable wheel-track chassis
Current situation: Dominance of single-mode platforms
Currently, agricultural mechanization relies predominantly on two distinct platforms: wheeled and tracked chassis. As discussed in Section 2, wheeled tractors are the standard for road transport and dry-field operations due to their high speed and fuel efficiency. Conversely, tracked systems have become the standard solution for harvesting and tillage in soft, wet paddy fields due to their superior flotation and traction capabilities. These two systems have matured independently, each optimizing for a specific, static set of terrain conditions. In recent years, increasing research attention has been directed toward wheeled-tracked hybrid tractors, aiming to address the operational limitations of conventional wheeled and tracked tractors under varying farmland conditions. Studies have shown that although wheeled tractors offer higher travel speeds and favorable road adaptability, they tend to experience severe sinking, high slip ratios, and frequent operational interruptions in high-moisture environments such as rotten fields and deepwater paddy fields typical of southern regions. Moreover, their operation often causes significant disturbance to soil structure. In contrast, tracked tractors offer excellent trafficability and low ground contact pressure, which effectively reduces soil compaction. However, their low transport efficiency, complex mechanical structure, and high maintenance costs limit their widespread application in multi-terrain operations.
Problem: The “adaptability paradox” in complex ecosystems
However, a critical operational bottleneck arises in the complex paddy field ecosystems of Southern China. These regions are characterized by a mosaic of environments: hard concrete roads for transport, dry soil for tillage, and deep mud for harvesting. As shown in Table 6 a single-mode chassis faces an “adaptability paradox”:(1) Wheeled tractors perform well on roads but suffer from severe sinking and high slip ratios (>20%) in wet fields, causing soil compaction.(2) Tracked tractors excel in mud but cause significant damage to road surfaces, consume more fuel during transport, and lack the agility for rapid cross-regional transfer. This dichotomy means that using either platform alone results in suboptimal performance during the full crop cycle.
The “adaptability paradox” in complex ecosystems.

Solution: The reconfigurable wheel-track chassis
To address these limitations, the wheeled-tracked integrated tractor has emerged as a promising solution that combines the advantages of both systems. As a result, it has become an increasingly prominent focus of current research in the field of agricultural machinery. The system supports flexible switching between wheeled and tracked modes. Mode selection is based on real-time terrain and task conditions. This improves adaptability across varying field environments. It also enhances operational efficiency while reducing soil damage. Therefore, it is well-suited for agricultural needs in hilly and paddy regions of southern China. Current research focuses on combining the advantages of tires and rubber tracks. Efforts have been made to develop interchangeable chassis systems using both components. This approach aims to enhance overall vehicle mobility and adaptability. 128 The wheeled-tracked hybrid locomotion system can switch between wheeled and tracked modes. It combines the advantages of both systems. Based on structural configuration, it can be roughly divided into two types: the wheeled-tracked series type and the wheeled-tracked integrated type.
Wheel-track tandem structure
Yoon-Gu Kim et al.129,130 designed an innovative wheeled-tracked reconfigurable robot. This robot integrates conventional wheels with a foldable track system. By adjusting the deployed or folded state of the tracks, the robot can quickly switch between wheeled and tracked modes. This allows it to adapt to different terrains and effectively overcome obstacles. Li, Z. et al. 131 from the Shenyang Institute of Automation designed and developed an adaptive mobile robot, NEZA-I, which combines wheeled and tracked mechanisms. Its structural configuration is shown in Figure 10. The robot can dynamically switch between wheeled (a) and tracked (b, c) modes. This switching is based on the constraint force provided by the ground. In basic prototype experiments, NEZA-I demonstrated strong terrain adaptability. It was able to navigate flexibly in unstructured environments and exhibited excellent obstacle-crossing performance. Experimental results showed that the robot could respond to terrain changes in real time across various test scenarios. No significant delay was observed. The effectiveness and feasibility of the MGCR model and its mechanism parameter analysis method were also validated.
Three motion modes of NEZA-I. 131
Unified wheel-track compound structure
The wheel-track tandem structure typically combines independent wheels with tracks to minimize mutual interference. This type of system offers high reliability. However, its structure is relatively complex and heavy. Consequently, the overall operational efficiency is reduced. To address this, researchers proposed a novel hybrid robot structure. It aims to simplify the system architecture while improving operational efficiency. The design allows the wheeled mechanism to switch directly between wheeled and tracked modes via a specific conversion mechanism. This enables more flexible terrain adaptability.
In recent years, a reconfigurable wheeled-tracked adaptive deformable wheel has attracted widespread attention online. This technology was jointly developed by the National Robotics Engineering Center at Carnegie Mellon University and the Defense Advanced Research Projects Agency. It is known as the Reconfigurable Wheel-Track (RWT) system. Its structure is illustrated in Figure 11. The deformable wheel has been integrated into the Hummer off-road vehicle platform. It enables rapid transformation from a circular wheel to a triangular track wheel during vehicle operation. This capability significantly enhances tactical mobility and terrain adaptability.

RWT.
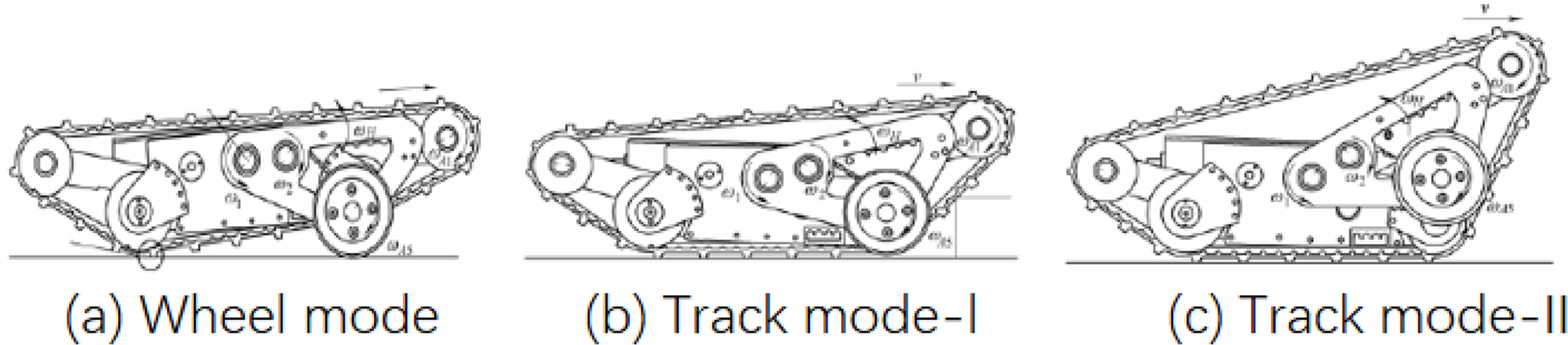
According to relevant test videos, the system can complete the wheel-track mode transition in approximately two seconds. It demonstrates excellent dynamic response performance. Wang et al. 132 designed a reconfigurable wheeled-tracked mobile system based on the principle of equivalent reconstruction, as shown in Figure 12. The system can dynamically switch between wheeled (a), half-tracked (b), and fully tracked (c) modes depending on different terrain conditions. The mode-switching functionality has been successfully demonstrated.

Mode transition of the locomotion system. 132
Structural innovation alone is insufficient for reliable operation; it must be coupled with intelligent decision-making and control strategies. Recent research has focused on three critical aspects: terrain perception, autonomous mode switching, and dynamic stability control. Firstly, to address the “when to switch” problem, Deep Reinforcement Learning (DRL) has demonstrated significant potential. For instance, recent studies133,134 successfully applied DRL with automatic curriculum learning to enable reconfigurable robots to autonomously learn optimal morphological adaptations for complex obstacles, significantly reducing deployment time. Secondly, regarding energy efficiency, optimization algorithms are being integrated into the switching logic. Empirical research on wheel-track reconfigurable robots indicates that dynamic mode selection based on real-time energy consumption models can improve field endurance by over 15% compared to static configurations. Finally, to ensure stability during the transition phase on slippery paddy soils, Adaptive Sliding Mode Predictive Control (ASMPC) 135 has been proposed. This approach combines the robustness of sliding mode control with the foresight of Model Predictive Control (MPC), effectively compensating for the non-linear slip disturbances typical of saturated soils. Recent advancements in path planning have transitioned from static geometric coverage to kinematic-aware dynamic planning, explicitly addressing the unique slip characteristics of paddy soils. Unlike dry-field operations, the high moisture content in paddy fields introduces significant non-linear slip, rendering traditional geometric algorithms insufficient. Furthermore, the integration of artificial intelligence (AI) into agricultural machinery represents a pivotal field combining agricultural automation with AI technologies.136–138 By optimizing path planning algorithms, this domain aims to enhance agricultural production efficiency and reduce energy consumption, while minimizing the impact on the farmland environment. 139
Problems and prospect
The expanding mechanization demands in southern paddy fields have progressively positioned wheeled and crawler-type agricultural machinery as core productivity enhancers within rice production systems. However, empirical validation of performance benchmarks has revealed persistent structural and systemic deficiencies in contemporary wheeled/tracked chassis machinery for southern paddy fields, particularly regarding terrain adaptability to undulated topographies, dynamic field conditions, and crop phenology requirements. Two critical constraints warrant priority attention: (1) preserving crop integrity during operations, (2) generalizing chassis structural designs, and (3) advancing agro-mechatronic integration for machinery-agronomy synergy.
Indirect impacts of mechanical operations on rice growth dynamics
Mechanization delivers substantial efficiency gains but inevitably perturbs rice agroecosystems, manifesting as: soil compaction and plow pan formation impeding root elongation and nutrient uptake140–144; seedling damage from wheeled machinery via high ground pressure-induced rutting, causing tilting, root fragmentation, and clustered mortality 145 ; tracked chassis-induced shallow disturbance gradients across 92–95% contact areas during post-transplanting operations5,146,147; and row tearing with spacing heterogeneity from frequent maneuvering in fragmented plots, compromising canopy ventilation and subsequent mechanization.
The future advancement of mechanized rice production necessitates enhanced emphasis on harmonious integration between agricultural machinery and agroecosystems. In machinery design domains, soil compaction and rutting risks can be mitigated through strategic mass reduction, ground-contact mechanism optimization (e.g. deformable tracks or low-pressure tires), and integrated pressure-regulation systems.148–152 Integrating sensor technology and intelligent control.153–162 Concurrently, sensor-based intelligence enables precision path planning with <15 cm deviation163–172 and dynamic power output modulation at >92% accuracy,173–177 collectively minimizing root-zone disturbances.148–150,178–183 Furthermore, novel machinery platforms with minimized turning radii or zero-radius steering capabilities should be developed to resolve seedling damage during fragmented-field maneuvering while enhancing operational stability.
Structural incompatibility of chassis systems constraining multi-functional equipment coordination
Contemporary wheeled/tracked chassis machinery for southern paddy fields predominantly adopts task-specific designs with rigid structural configurations and limited functional versatility. These machines are optimized for single operations such as transplanting or tillage. They lack modular scalability and cannot interoperate with other equipment. This limits their use in multi-stage farming. While enabling high operational efficiency in targeted tasks, such task-centric platforms exhibit critical limitations under intensive rice cultivation regimes featuring frequent seasonal transitions and condensed agronomic schedules. This leads to systemic inefficiencies: weak agricultural machinery coordination, suboptimal agricultural machinery utilization, and compromised cost-effectiveness.
Exemplified by crawler-type rice transplanters, while demonstrating superior terrain adaptability and consistent transplanting quality, their chassis systems exhibit critical incompatibility with auxiliary modules such as topdressing, spraying, and inter-row cultivation devices. Empirical studies confirm that the average annual utilization per transplanter remains below 20 operational days—prolonged idleness due to functional constraints results in substantial resource waste and suboptimal investment efficiency. Similarly, wheeled harvesters face functional rigidity post-harvest seasons, incapable of adapting to light-duty tasks like field transport or secondary tillage. This systemic inefficiency stems from a fundamental dichotomy: prevailing agricultural machinery designs adhere to a task-centric paradigm rather than adopting a platform-agnostic philosophy as their developmental archetype. 184 Moreover, technical exclusivity among manufacturers exacerbates modular incompatibility, compelling farmers to procure redundant agricultural machinery sets that elevate system configuration thresholds. By contrast, mature multi-purpose machinery systems have been commercialized in advanced agricultural economies. Japanese manufacturers, exemplified by Kubota and Komatsu, deploy wheel-track hybrid platforms featuring rapid-agricultural machinery-swapping mechanisms. Similarly, Italian OEMs adopt standardized ISO compliant hitches achieving >93% attachment compatibility across seeding, tillage, and fertilization operations. In China, research on universal chassis platforms remains in a nascent phase. Prototype modular tracked chassis field systems have been developed by academic institutions, yet demonstrate limited adoption. These limitations are primarily constrained by three techno-economic barriers: interface standardization deficits, suboptimal modular integration, and marginal cost-effectiveness. To standardize chassis designs, multiple innovations are required. These include improvements in structure, interface protocols, and operational compatibility.
The future development of agricultural machinery for paddy fields in southern China should follow the direction of “modularized operational units + universal chassis + open control systems”.68,185,186 This approach aims to promote the construction of an agricultural machinery system with multi-task adaptability, cross-season reusability, and regional compatibility, thereby enhancing the overall utilization efficiency of agricultural machinery and supporting sustainable agricultural operations.
Suboptimal machinery-agronomy coupling and inadequate operational adaptability
The actual performance of agricultural machinery depends heavily on its compatibility with agronomic parameters and operational protocols. However, current mechanized systems for southern paddy fields still lag behind in the coordinated design of machinery and agronomy. This systemic decoupling originates from bidirectional deficiencies: agronomic practices were predominantly designed based on manual operations, neglecting critical machinery parameters including wheel track widths, row spacing configurations, agricultural machinery dimensions, and turning radii 171 ; while agricultural machinery R&D prioritized mechanical performance optimization over systematic simulation and validation of crop-specific adaptations such as transplanting density, tillage depth precision, and ridge width compatibility. 187 This discordance compromises field performance despite agricultural machinery versatility, manifesting as operational instability, imprecise positioning, and agronomic management deficiencies. For instance: conventional transplanters with rigid configurations lack adaptive control capabilities for varietal-specific requirements in insertion depth, spacing patterns, and seedling orientation188–190; similarly, harvesters inflict significant ratoon stubble damage during regenerative rice operations. 191 Such limitations persist even in advanced intelligent machinery, underscoring the absence of agronomy-driven mechanical adaptation frameworks.
Conclusions
This systematic review delineates the inherent performance trade-offs between wheeled and tracked machinery in southern paddy systems. While wheeled configurations offer maneuverability for dry operations, tracked systems excel in traction on hydromorphic terrains. To transition “from compaction to coexistence”—a state where machinery operates in harmony with the fragile paddy ecosystem rather than degrading it—future engineering must transcend simple structural choices. Coexistence means: (1) Soil coexistence: The ground contact pressure must be lower than the soil's bearing capacity; (2) Crop coexistence: The rate of operational damage (e.g. seedlings being buried or crushed) must be controlled below the agronomic threshold. The path to coexistence lies in: (1) Modular Platformization: Developing universal chassis architectures that reduce equipment redundancy and soil traffic; (2) Intelligent Adaptability: Utilizing sensor-fusion and AI capabilities to dynamically adjust ground pressure and navigation paths, thereby minimizing root-zone disturbance; and (3) Agronomic Integration: Designing machinery parameters (e.g. track width, turning radius) that strictly adhere to agronomic requirements. Only by integrating these advanced chassis engineering strategies can we ensure sustainable food production in complex paddy field ecosystems.
Footnotes
Author Note
To ensure a comprehensive and systematic review of chassis technology in paddy field environments. Search Strategy and Data Sources: We performed a systematic search across primary databases: Web of Science, covering the time span from January 1996 to December 2025. To capture locally relevant technological advancements in China (a major region for paddy mechanization), the CNKI database was also consulted. Search Queries: The search strings combined keywords related to the environment, machinery type, and mechanism using Boolean operators: (“Paddy field” or “Wetland” or “Soft soil”) and (“Agricultural machinery” or “Tractor” or “Chassis” or “Robot”) and (“Wheel” or “Track” or “Reconfigurable” or “Amphibious”). Titles and abstracts were screened to exclude studies focusing solely on dry-land agriculture, engine performance only, or purely agronomic planting techniques without mechanical analysis. Articles were selected based on their contribution to chassis structural design, soil-machine interaction mechanics, and control strategies. Ultimately, Total Number 193 highly relevant papers were selected for detailed analysis and data extraction.
Ethical statement
This study does not involve human or animal subjects.
Author contribution
Zhong Tang: conceptualization, methodology, and funding acquisition. Peichen Chu: writing–original draft and data curation. Zhao Ding: visualization and investigation. Meng Fang: supervision and writing–review and editing.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China, Central Zhejiang Science and Technology Innovation Corridor Joint Fund of Zhejiang Provincial Natural Science Foundation of China, and Jiangsu Province Postgraduate Research and Innovation Project (Grant Numbers 52275253, LJHSZ26E050001, and KYCX24_3997).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data and the related conclusions presented in this article were all derived from the Web of Science database and “CNKI” (China National Knowledge Infrastructure).