
Abstract
Existing studies on the symmetric spherical pendulum are limited to small- and moderate-amplitude vibrations. This study was conducted to obtain accurate solutions for analysis of the large-amplitude vibration of a symmetric magnetic spherical pendulum using the continuous piecewise linearization method (CPLM). The stability conditions and bifurcation of the pendulum were derived based on the critical points, while the CPLM was used to estimate the frequency response and vibration histories to less than 0.1% and 1.0% relative error respectively when compared to numerical solutions. The CPLM was found to be significantly more accurate than the Laplace transform homotopy perturbation method and predicted the large-amplitude bi-stable vibrations accurately. The stability analysis that was conducted enabled the characterization of all bounded symmetric vibrations based on the relationship between the cyclotron frequency and azimuthal velocity, whereas the bifurcation analysis confirmed that the symmetric vibrations can undergo pitchfork bifurcation that results in transition from single-well to double-well (or bi-stable) vibrations and vice versa. Finally, a parametric analysis was conducted to study the effect of the cyclotron frequency and uniform azimuthal velocity on the frequency–amplitude response and vibration histories The parametric analysis showed that the frequency–amplitude response has a strong dependence on the cyclotron frequency and azimuthal velocity for all amplitudes. On the other hand, the oscillation profile only depends on the cyclotron frequency and azimuthal velocity for some amplitudes. The results of this study can be applied in the design of energy harvesters and elliptic tanks for liquid transport.
Keywords
Introduction
Background
Pendulum systems are one of the most investigated vibration systems. They can be used for pedagogical purposes,1–5 understanding nonlinear phenomena,6–8 analyzing the vibration of actual mechanical systems,9–11 and energy harvesting applications.12,13 The vibration of a spherical pendulum is a classical mechanics problem.14,15 Its motion is characterized by simultaneous planar oscillations in the vertical plane and rotational motion in the horizontal plane while moving in a gravitational field.
In recent times, the vibration of the spherical pendulum in both gravitational and electromagnetic fields have been of interest due to energy harvesting potential.12,13 The resulting vibration model derived by considering both gravitational and electromagnetic fields is somewhat complicated and difficult to solve. The reason is because the vibration model is characterized by trigonometric nonlinearities which are not directly solvable by asymptotic or series-based approximate analytical methods. The latter methods require that the trigonometric nonlinearities are expanded in Taylor's series and approximated by a few terms of the series (see, e.g. Moatimid and Amer 16 ). Since Taylor's series has a slow convergence, using a few terms in the series introduces significant truncation errors which become obvious under conditions of strong nonlinearity or large-amplitude vibration. This makes the accurate prediction of the large-amplitude vibration response challenging. There is therefore a need to derive approximate analytical solutions that are capable of estimating the large-amplitude vibration response of the spherical pendulum accurately. This article is aimed at deriving an accurate periodic solution for the large-amplitude vibration analysis of a magnetic spherical pendulum. We also determine the conditions for stable vibrations and examined the bi-stable vibrations. The results of the present study can be used in the design of energy harvesters and elliptic tanks for liquid transport.
Literature survey
Predicting the vibration response and stability of the spherical pendulum has been subject of many investigations. Landau and Lifshitz 15 formulated the complete vibration model of the spherical pendulum in polar coordinates and derived the first integral of the planar motion. They concluded that the exact periodic solution can be expressed in terms of the incomplete elliptic integral of the second kind but did not solve for it. Olsson 17 investigated the precession of a spherical pendulum restricted to small-amplitude vibrations. Based on results of perturbation analysis, he concluded that the precession rate of the elliptical orbit of the spherical pendulum is proportion to the area of the orbit. Olsson 18 conducted a follow-up study on the precession of the spherical pendulum undergoing small-amplitude vibrations. The vibration model was derived in both polar and Cartesian coordinates. It was shown that the theoretical solution for the precession orbit of the small-amplitude vibration agreed with the measurements of a simple laboratory experiment. Miles19,20 investigated the stability and weakly nonlinear vibration of a forced damped spherical pendulum. The studies showed that the resonant response of the spherical pendulum could produce stable non-planar vibrations when the planar motion is unstable. Also, the pendulum could produce periodic doubling and chaotic response under certain parametric conditions. Miles and Zou 21 studied the detuning of a weakly nonlinear spherical pendulum subject to parametric excitations. They examined the bifurcation of the spherical pendulum and discovered the existence of saddle node, hopf, subcritical pitchfork, and supercritical pitchfork bifurcations.
The common feature of the older studies is that they involve a spherical pendulum moving in a gravitational field only. Recent attention has now shifted to the motion of a spherical pendulum in both gravitational and electromagnetic fields due to the potential for energy harvesting.12,13 To this end, the magnetic spherical pendulum has become a system of interest. Cushman and Bates 22 derived a 2-DOF vibration model for a magnetic spherical pendulum with electrically charged mass moving in both magnetic and gravitational fields. They showed that the magnetic spherical pendulum can be used to study the Lagrange top with reduced symmetry about the body axis. However, they did not investigate the vibration response of the magnetic spherical pendulum. Porta and Montiel 23 obtained analytical solutions for the free vibration of the magnetic spherical pendulum by first transforming the vibration models from polar coordinates to Cartesian coordinates and then considering only linear to weakly nonlinear conditions. Moatimid and Amer 16 applied the Laplace transform homotopy perturbation method (LTHPM) to derive approximate analytical solutions for a freely vibrating magnetic spherical pendulum with uniform horizontal velocity. They derived a 1-DOF model for the planar motions of the pendulum which they simplified further by using truncated Taylor series approximations for the trigonometric functions. They validated their approximate LTHPM solution using numerical results for small- and moderate-amplitude vibrations. They also performed a linear analysis to examine the stability of the equilibrium points. An obvious gap in the previous studies on the magnetic spherical pendulum is that they did not investigate the large-amplitude vibrations or the bi-stable vibrations of the magnetic spherical pendulum. In the present study, we attempt to close this gap and examine the conditions for the existence of symmetric vibrations through a comprehensive qualitative analysis of the magnetic spherical pendulum.
There are no exact solutions in terms of elementary functions to the nonlinear vibration models of pendulum systems. Consequently, approximate solutions are normally applied to solve nonlinear pendulum models. Currently, there are many approximate analytical methods for solving nonlinear vibration models, e.g. modified Lindstedt Poincare method,
24
harmonic balance method,
25
Newton harmonic balance method,
26
homotopy analysis method,
27
homotopy perturbation method,
28
variational iteration method,
29
Adomian decomposition method,
30
cubication method,
31
quintication method,
32
energy balance method,
33
amplitude frequency formulation,
34
Mickens’ iteration method,
35
global residue harmonic balance method,
36
and method of multiple scales.
37
Big-Alabo and Ossia
38
reviewed many of these methods and highlighted a range of limitations, which include that most approximate methods:
require complex algebra for more accurate higher-order approximations,24,25,27–29,30,36 produce significant errors for large-amplitude or strong nonlinear conditions,24,25,28 only work with polynomial functions in the restoring force (Cheung et al., 1991; Nayfeh and Mook, 1995; Liao, 2004; He, 1999a; Adomian, 1988; Lu, 2022),24,25,27,28,30,36 and are not capable of capturing essential anharmonic profile that characterizes the vibration histories of strong nonlinear vibrations.33,34
An approximate method for the solution of nonlinear conservative oscillators that has proven to overcome the above challenges and combines accuracy with simplicity is the continuous piecewise linearization method (CPLM).38,39 A major advantage of the CPLM is that the solution remains simple irrespective of the complexity of the restoring force. Additionally, the CPLM does not require higher-order terms, accepts arbitrary initial conditions, and works with polynomial and non-polynomial functions in the restoring force. The CPLM has been applied to solve pendulum systems undergoing strong nonlinear vibrations,
40
slider-crank mechanism with complex non-polynomial restoring force,
41
and ship roll motion with strong asymmetric nonlinearity.
42
Given the above advantages of the CPLM, it was applied in the present study to investigate the frequency–amplitude response and the vibration histories of the symmetric magnetic spherical pendulum.
The literature survey shows that previous studies on the vibration of the magnetic spherical pendulum12,16,21,22 are limited to small- to moderate-amplitude vibrations and have not investigated its bi-stable vibration response. Therefore, this study focuses on the stability, bifurcation, and large-amplitude vibration of a freely vibrating symmetric magnetic spherical pendulum using the CPLM. The conditions for stability were explored more comprehensively compared to the study conducted by Moatimid and Amer, 16 and a bifurcation analysis was conducted based on the critical points. In particular, the conditions for double-well or bi-stable vibrations, not considered in other studies, were established, and an accurate periodic solution for the bi-stable vibration histories was obtained.
Scope and contribution of study
The scope of the present study is limited to the theoretical analysis of the stability, bifurcation, and large-amplitude vibration analysis of a magnetic spherical pendulum constrained to a uniform azimuthal velocity. The stability and bifurcation of the pendulum were examined through qualitative analysis of the critical points. The equation to determine the bifurcation points was derived based on the parameters of the pendulum, and all bounded symmetric vibrations were characterized. The latter showed the conditions under which bi-stable symmetric vibrations can occur. For the periodic solution, the CPLM algorithm was applied to derive accurate solutions for the frequency response and vibration histories of the large-amplitude vibration under uni- and bi-stable conditions. The CPLM was shown to be more accurate than published approximate results. Finally, parametric analysis was conducted to examine the effect of the azimuthal velocity and cyclotron frequency on the vibration response of the pendulum.
Formulation of vibration model
The magnetic spherical pendulum consists of an electrically charged bob of mass, m, carrying a positive charge, e, and suspended from a fixed point by a weightless inextensible string of length, l. The motion of the bob is influenced by a constant gravitational field, g, and a constant magnetic field, B. The magnetic field is induced by a magnetic monopole at the equilibrium point of the bob. A diagrammatic representation of the physical model of the magnetic spherical pendulum is shown in Figure 1(a). During motion the string of the pendulum forms an angle

(a) Physical model of the magnetic spherical pendulum. (b). Travel path of the planar motion of the pendulum from its equilibrium position.
The pendulum possesses kinetic and potential energies due to the gravitational and magnetic fields. First, we consider the kinetic and potential energies due to the gravitational field. Given that the motion of the pendulum is in 3-D, its position at any instance can be defined by the position vector:












Now, the equations of motion of the freely vibrating undamped spherical magnetic pendulum can be derived from the Euler–Lagrangian equation given as:

For the




Equation (17) is the model for the planar symmetric vibration of the unforced undamped magnetic spherical pendulum, and it can be written as:


Integrating equation (17) and applying the initial conditions,



Mapping of initial and parametric conditions for
Qualitative analysis of the vibration response
Potential function
The potential function is an analytical expression for the potential energy (energy possessed by a body due to its state or position) of a system. The potential function represents the energy stored in the system when it is displaced from its equilibrium position. Understanding the potential function is essential for analyzing the behavior of oscillating systems as it provides insight into the stability of the system and the energy changes within the system as it oscillates. The potential function,


Potential function and phase plots for

Potential function and phase plots for

Potential function and phase plots for
Stability analysis
Two system parameters, the azimuthal velocity and the cyclotron frequency, were varied to investigate the system's qualitative response. If the system returns to the equilibrium position with time, the system is said to possess a stable equilibrium. On the other hand, if the system deviates from its equilibrium position or produces an unbounded response after a small displacement, it is said to possess unstable equilibrium. The stable and unstable points can be obtained from the potential function. These points occur when the potential gradient is zero and are known as critical points (

A vibrating system is stable at minimum potential energy and unstable at maximum potential energy. This implies that we can find the stable and unstable points of the critical points by taking the second derivative of the potential function. Therefore, the conditions for stable and unstable points are, respectively,


The stability of the pendulum based on the critical points has been illustrated graphically in Figure 6. The plots show the stable points in blue color and the unstable points in red color. The two points, X (

3-D stability plots showing stable points (left) and unstable points (right).
Characterization of the vibration of the magnetic spherical pendulum.

Bifurcation analysis
Bifurcation analysis involves systematically varying parameters in a dynamical system to explore how its response or trajectories change qualitatively. It offers insight into the stability, patterns, and responses of the dynamical system to varying conditions. The numerical values of a set of system parameters that produces a qualitative change in the system's response is known as the bifurcation point. In the present study, a bifurcation analysis was conducted by considering the qualitative change in the stability conditions of the system. The two system parameters, i.e., 


Bifurcation plots showing the effect of the uniform azimuthal velocity on the stability of the spherical magnetic pendulum.
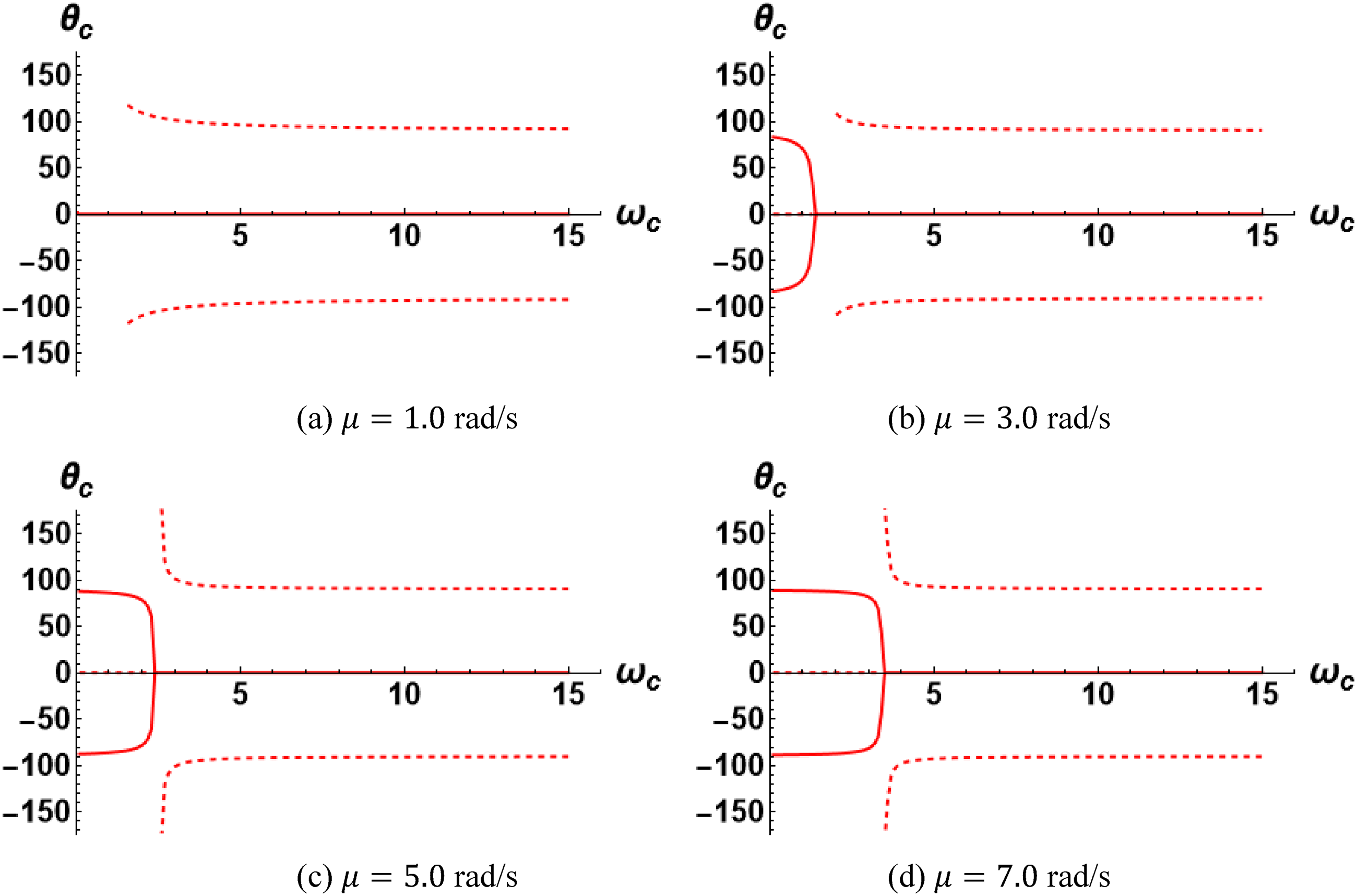
Bifurcation plots showing the effect of the cyclotron frequency on the stability of the magnetic spherical pendulum.

Bifurcation points of the magnetic spherical pendulum.
Periodic solution
Continuous piecewise linearization method
The CPLM is based on piecewise discretization of the force-displacement or compliance response of a vibrating system. Each discretization of the nonlinear compliance response is approximated using a linear compliance from which a linearized version of the equation of motion is obtained. The solution of the linearized equation of motion provides an approximate solution for the nonlinear equation of motion over the range of discretization. Hence, the CPLM was formulated such that it updates the solution of the linearized equation as we move from one discretization to the next. This way, an approximate solution for any nonlinear conservative system can be obtained in an unconditionally stable scheme. 38 Apparently, an extension of the CPLM to solve nonlinear vibration models of non-conservative systems requires numerical solution to the nonlinear algebraic equation resulting from determining the time. 44 Hence, it is most effective for conservative systems where the CPLM uses only closed-form solutions.
For conservative systems with symmetric vibrations, the range of discretization is a quarter cycle (i.e.
In order to accelerate the convergence and reduce the computational time, unequal divisions can be applied to discretize the solution domain so that the regions of the compliance response that are characterized by strong nonlinear response can use small step sizes, while the regions with weak to moderate nonlinearity can use large step sizes (see Figure 10). One such technique that utilizes the concept of unequal divisions has been proposed by Big-Alabo and Ezekwem,
45
who applied the CPLM to investigate the nonlinear transient response of the temperature of a combustible iron particle. The discretization technique is such that the step size reduces with successive discretization as we move away from the origin to the limit of the solution domain. This is because the nonlinearity becomes stronger as we approach the limit of the solution domain. Based on this technique, the step size for the 


Discretization of nonlinear compliance of a symmetric conservative oscillator (a) equal (constant) step size (b) unequal step size.
According to the CPLM algorithm, the linearized force within each discretization of the compliance response could be expressed as
38
:


Positive linearized stiffness,
The solution of equation (30) if 

Essentially, the CPLM uses the discretization and linearization of the nonlinear compliance response to derive corresponding time solutions for points on the exact velocity-displacement or phase relationship. Therefore, the CPLM generates the solution (
On the other hand, the initial conditions for the half cycle that moves from 
The solution of equation (30) if 




Application of CPLM to the magnetic spherical pendulum
During implementation of the CPLM, we need to know the conservative restoring force and the solution domain. The conservative restoring force can be obtained from the equation of motion (see equation (19)), and the solution domain for the magnetic spherical pendulum is that of a symmetric oscillator. The solution domain is used for discretization while the restoring force is used to determine the main CPLM parameters. For the magnetic spherical pendulum, the main CPLM parameters are:


The magnetic spherical pendulum has the following initial conditions:
Convergence and accuracy of the CPLM
In studying the vibration of the magnetic spherical pendulum, we consider the following response categories: small-amplitude (
The convergence test was conducted using equal and unequal discretization for large-amplitude (

Comparison of convergence of equal and unequal discretization: (a) large-amplitude vibration (
Convergence test for equal and unequal discretization.

The accuracy test was conducted to determine the error of the CPLM solution in predicting the displacement and velocity histories using the number of discretization obtained from the convergence test. Also, the CPLM solution was compared with the solution of the second-order LTHPM derived by Moatimid and Amer.
16
The second-order LTHPM solution was derived for the initial conditions:

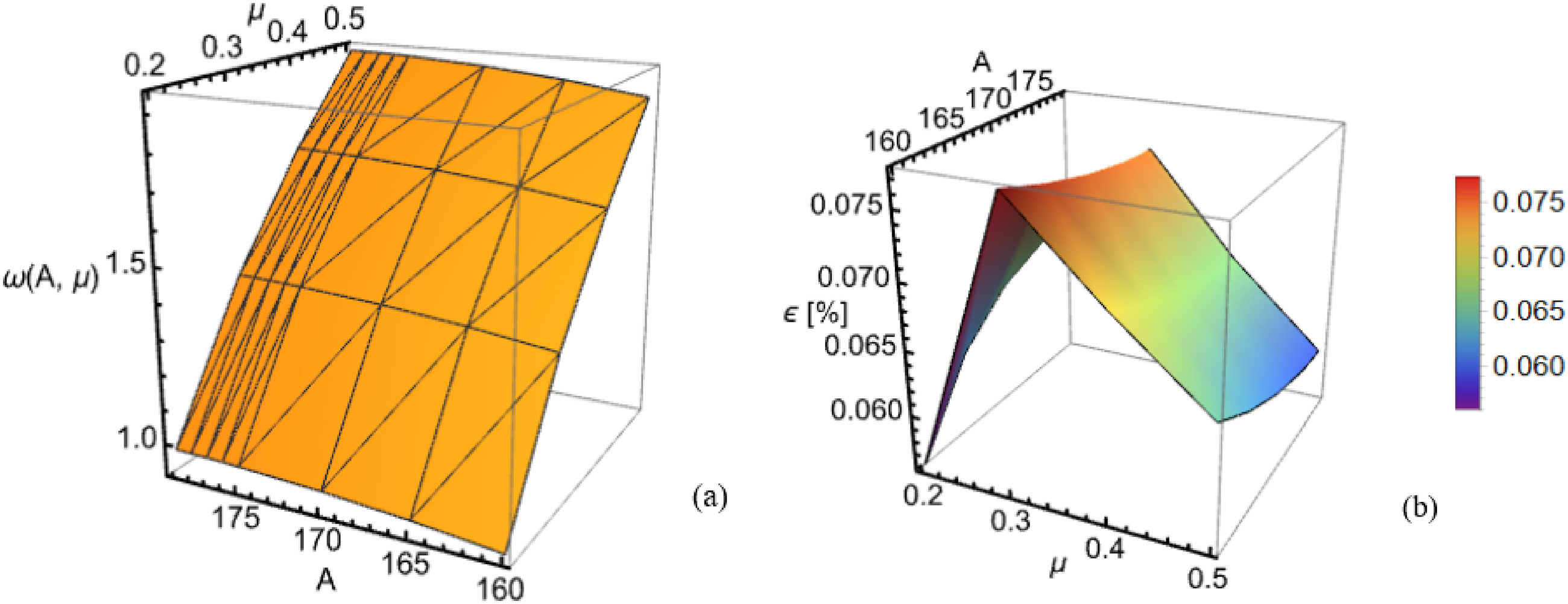
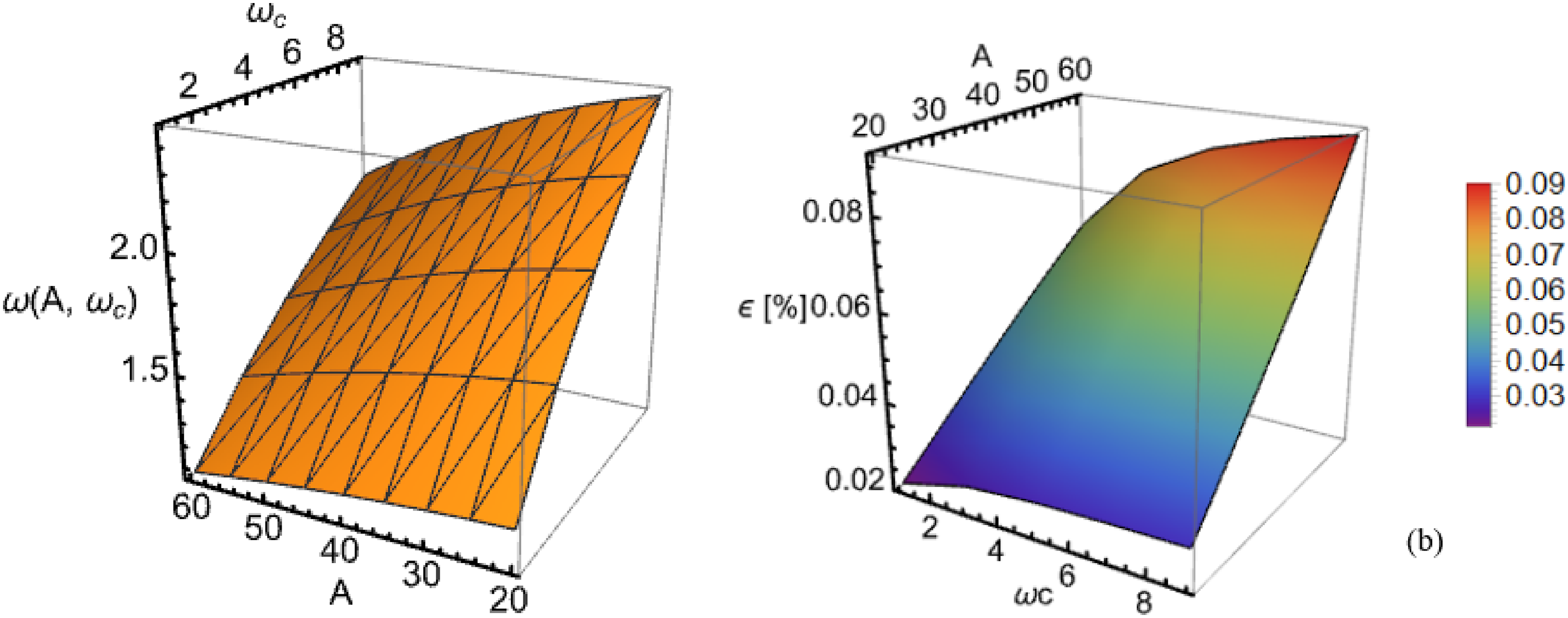
Comparison of CPLM (

Comparison of CPLM (

Comparison of CPLM (
Frequency–amplitude response and vibration histories
The periodic response, in terms of the frequency–amplitude response and vibration histories, of the magnetic spherical pendulum was investigated to ascertain the effects of the cyclotron frequency and uniform azimuthal velocity. The results of the investigation are plotted in Figures 15 to 30 for small-amplitude, moderate-amplitude, large-amplitude, and very large-amplitude vibrations. The plots were generate for

(a) Effect of uniform azimuthal velocity on the frequency–amplitude response for small-amplitude vibrations:

Effect of uniform azimuthal velocity (

(a) Effect of

Effect of uniform azimuthal velocity (

(a) Effect of

Effect of uniform azimuthal velocity (
(a) Effect of

Effect of uniform azimuthal velocity (

(a) Effect of

(a) Effect of
(a) Effect of

(a) Effect of
(a) Effect of
(a) Effect of

(a) Effect of
(a) Effect of
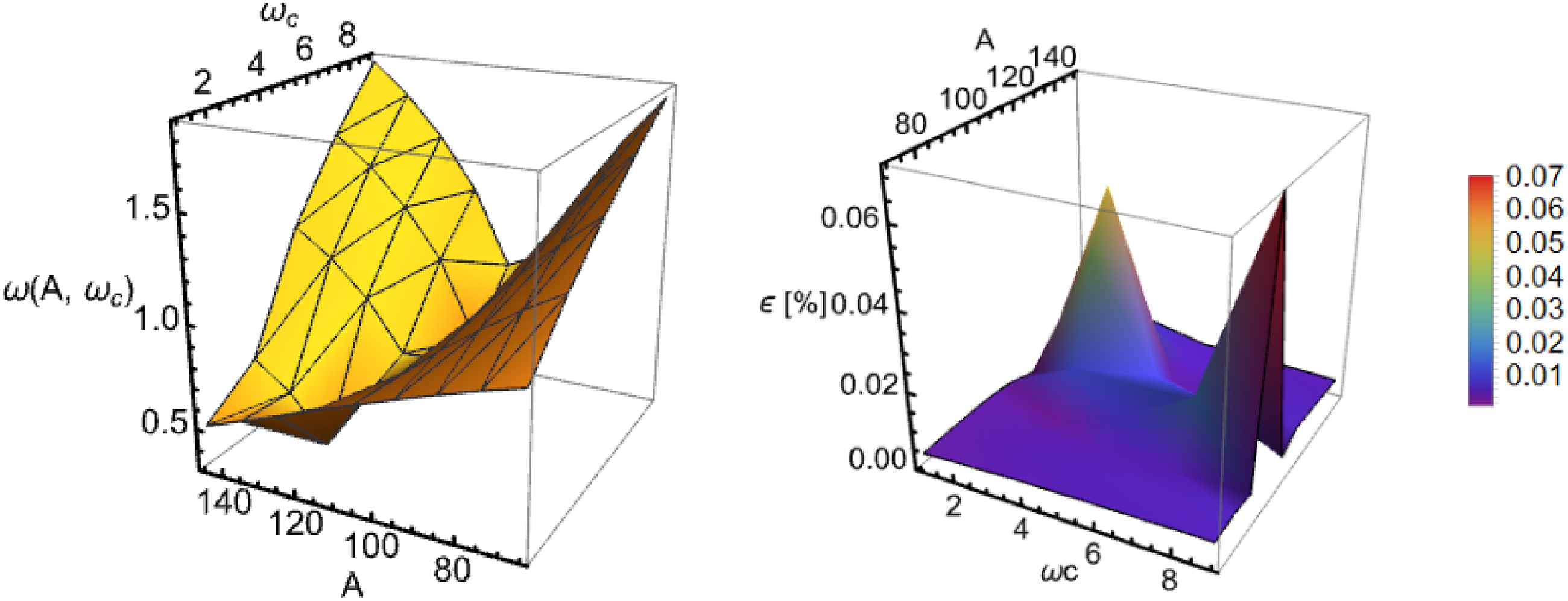
For the small-amplitude vibration, an increase in the cyclotron frequency or azimuthal velocity results in a stronger nonlinear stiffness with increased nonlinear frequency. However, the amplitude has no significant effect on the nonlinear frequency. During moderate-amplitude vibration, the nonlinear frequency increases with the cyclotron frequency or azimuthal velocity and decreases with increase in the amplitude. For the large-amplitude vibration, the nonlinear frequency increases with the cyclotron frequency or azimuthal velocity, but it decreases with an increase in the amplitude up to a point beyond which the nonlinear frequency increases with amplitude. This qualitative change in the frequency–amplitude response is indicative of the existence of bifurcation due to variation in the amplitude. For the very large-amplitude vibration, the nonlinear frequency increases with the cyclotron frequency or azimuthal velocity. Again, the nonlinear frequency increases slightly with amplitude for changing azimuthal velocity (see Figure 21). In the case of very large-amplitude vibrations with changing cyclotron frequency (see Figure 29), the nonlinear frequency decreases slightly with the increase in amplitude up to certain value of the cyclotron frequency beyond which it increases slightly with increase in amplitude. This behavior is indicative of the existence of a bifurcation due to changes in the cyclotron frequency. Bifurcation driven by the cyclotron frequency was illustrated in Figures 8 and 9 and has been discussed in section “Convergence and accuracy of the CPLM.”
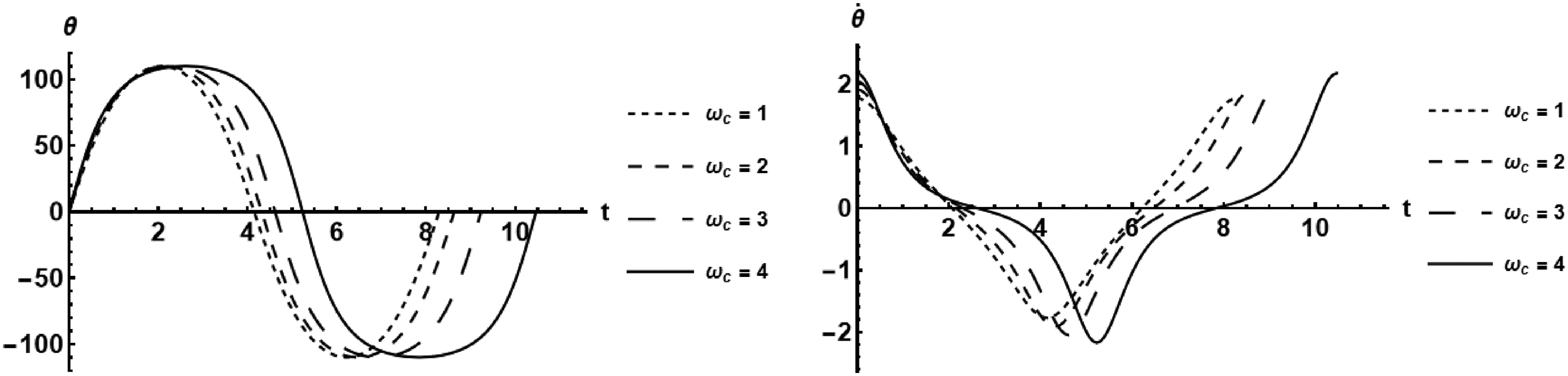
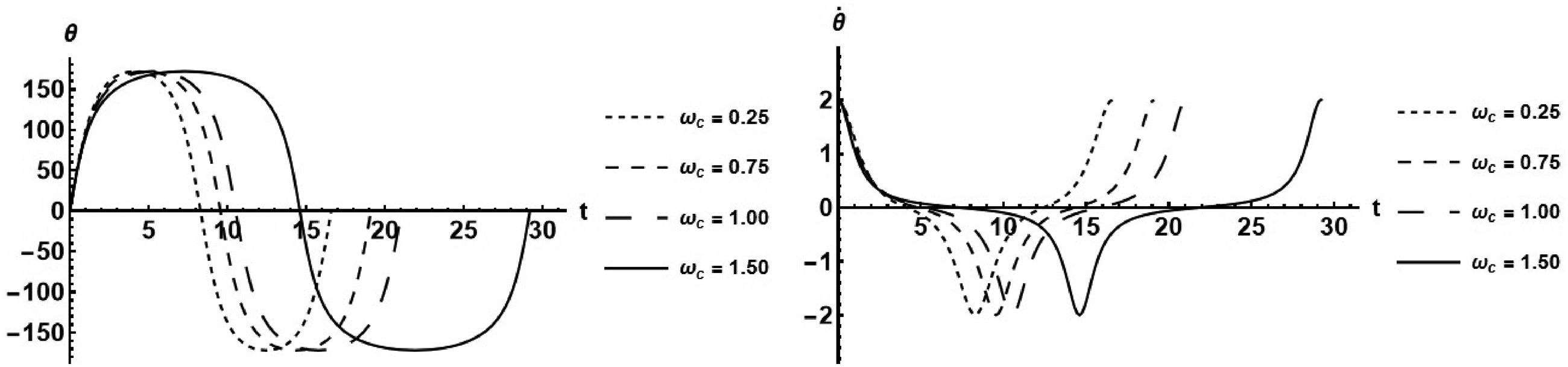
The plots of the vibration histories (see Figures 16, 18, 20, 22, 24, 26, 28, and 30) show the effects of the azimuthal velocity and cyclotron frequency on the displacement and velocity profiles of the magnetic spherical pendulum for small-amplitude, moderate-amplitude, large-amplitude, and very large-amplitude vibrations. In all cases, except for the large-amplitude vibration, the azimuthal velocity and cyclotron frequency showed no significant effect on the displacement and velocity profiles. The effects of varying the azimuthal velocity and cyclotron frequency only show up on the response period (or frequency). However, for the large-amplitude vibration, it was observed that an increase in either of the azimuthal velocity or cyclotron frequency leads to stronger anharmonic profile, thereby confirming a stronger nonlinear response. We can then conclude that the azimuthal velocity and cyclotron frequency can be used as tuning parameters to effectively adjust the nonlinear response of the magnetic spherical pendulum.
Conclusion
The oscillation of a spherical pendulum is both gravitational and electromagnetic field is of interest because of its potential for energy harvesting. Previous studies on the symmetric magnetic spherical pendulum have been limited to small- and moderate-amplitude vibrations or weakly nonlinear conditions. In this article, we derived accurate periodic solutions to investigate the large-amplitude vibrations of a symmetric magnetic spherical pendulum. The vibration model was derived as a single degree-of-freedom symmetric oscillator in terms of the planar motion, and it reveals that the symmetric vibration of the magnetic spherical pendulum depends on the uniform azimuthal velocity and the cyclotron frequency, the latter representing the effect of the magnetic field on the charged pendulum mass. The restoring force of the magnetic spherical pendulum is a trigonometric function of sine and cosine terms which makes its dynamics complex and difficult to solve accurately with approximate analytical techniques; especially during large-amplitude vibrations when the pendulum possess very strong nonlinearity. In this study, the CPLM was applied to obtain accurate solutions for the large-amplitude vibrations of the magnetic spherical pendulum. Using an improved discretization technique that accelerates the convergence of the CPLM, it was observed that frequency solutions with less than 0.1% relative error and vibration histories with less than 1.0% relative error can be achieved with a few discretization of the solution domain. For the magnetic spherical pendulum,
Stability analysis of the magnetic spherical pendulum revealed the existence of single-well and double-well oscillations. The center of vibration for all symmetric single-well oscillations is at the origin or equilibrium point of the pendulum, while the double-well oscillations have their centers at two points equidistant from the origin. For the single-well oscillations, the stability analysis showed the existence of vibrations constrained by a limiting amplitude that is less than the kinematic constraint imposed by the pendulum. On the other hand, the bifurcation analysis showed that the pendulum exhibits a pitchfork bifurcation from single- to double-well oscillations and vice versa. The type of symmetric vibration experienced by the pendulum depends on the relative magnitudes of the uniform azimuthal velocity and cyclotron frequency. Therefore, the conditions for the different types of symmetric vibration were obtained and summarized in Table 1. Furthermore, an equation to determine the bifurcation points was derived and plotted to characterize the regions for double-well and single-well oscillations.
Finally, a parametric analysis was conducted to study the effect of the cyclotron frequency and uniform azimuthal velocity on the frequency–amplitude response and vibration histories. The results of the parametric studies (Figures 15 to 30) revealed the following:
The frequency increases with the cyclotron frequency and uniform azimuthal velocity for small-amplitude, moderate-amplitude, large-amplitude, and very large-amplitude vibrations. The frequency shows no significant change with amplitude during small-amplitude vibrations, whereas it decreases as amplitude increases during moderate-amplitude vibrations. For large-amplitude vibrations, the frequency decrease with increasing amplitude until it gets to an amplitude beyond which the frequency increases with amplitude. This implies a bifurcation due to change in amplitude. For the very large-amplitude vibration, the frequency increases only slightly with the increase in amplitude. The oscillation profiles showed no observable change with increase in cyclotron frequency or uniform azimuthal velocity during small-amplitude, moderate-amplitude, and very large-amplitude vibrations. However, a stronger anharmonic profile was observed in the velocity-history of the large-amplitude vibrations when the cyclotron frequency or uniform azimuthal velocity was increased.
The results of the present study can be applied in the design of energy harvesting systems and elliptic tanks for liquid transport. The present study was limited to symmetric vibrations of the magnetic spherical pendulum. However, the pendulum can also undergo asymmetric vibrations when the azimuthal velocity is not constant. This can be the subject of future investigations to deepen understanding of the dynamics of the magnetic spherical pendulum. Furthermore, experimental investigations can be conducted to provide validation for the theoretical analysis and deepen understanding of the system's energy harvesting potential.
Footnotes
Author contribution
Dr A. Big-Alabo: conceptualization, methodology, solution, analysis of results, supervision, and writing and proofreading. Mr M.T. Chuku: methodology, solution, simulation, analysis of results, and proofreading.
Data availability
All necessary data for this study has been included in the manuscript.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.