
Abstract
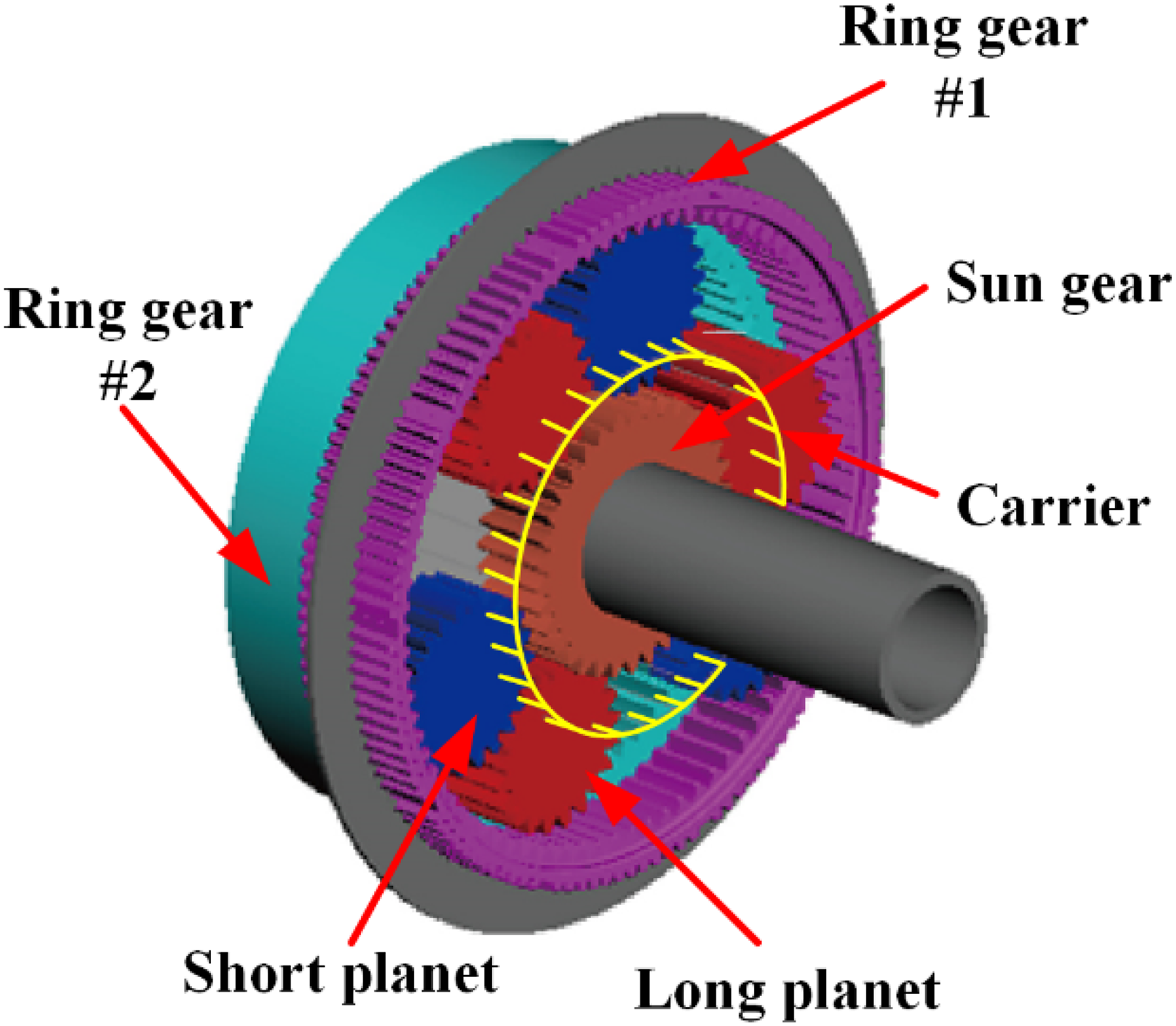
Double-row planetary gear set (PGS) is a common form of the PGS, which is relatively more complex than the regular PGSs. It consists of one sun gear, several long planets, several short planets, two ring gears, and one carrier. Due to the significantly wider tooth width of the long planet compared to the sun gear, the axial meshing position between the sun gear and the long planet can be adjusted. The vibrations of PGS should vary with different axial meshing positions. If the axial position of the sun gear is optimized, the vibrations of PGS can be reduced. This work establishes a dynamic model of a double-row PGS. The dynamic model considers the mesh forces of the gear pairs and the supporting forces of the bearing. The effect of the sun gear axial position on the sun gear and ring gear #2 vibrations are investigated. Finally, the recommended axial position for the sun gear is provided.
Introduction
Planetary gear set (PGS) is widely used in various transmission mechanisms. Due to different requirements, the PSG is usually designed in various structural forms. Double-row PGS (double-ring Ravigneaux PSG) is a common form that is relatively more complex than the regular PGS. 1 It utilizes a long planet to transmit power. The sun gear tooth width and the long planet tooth width have a significant difference. The excessive vibration may cause some fails in the double-row PGS, which will affect its reliability and operational stability. 2 The axial position of the sun gear has a significant effect on the vibrations of the double-row PGS. Thus, it is essential to establish the double-row PGS dynamic model and investigate the effect of the sun gear axial position on the vibrations of the double-row PGS.
The study methods for the double-row PGSs are similar to those for the PSGs. Many works3–15 have been conducted in the PGS dynamic modeling methods. Liu et al.16,17 established a dynamic model for a double PGS and investigated its vibrations. In their work, the planetary bearings were completely modeled. Li et al. 18 investigated the effect of the planetary bearing ring wear on the double PGS vibrations. The ring wear was the time-varying; and it was regarded as bearing clearance. Shen et al. 19 proposed a dynamic model for the PGS with the gear wear. They considered the effect of the gear wear on the meshing stiffness and the meshing deformation by regarding the gear wear as the gear backlash. Xiang et al. 20 investigated the vibrations of a multistage planetary gear system with the gear tooth spalling. The effect of the gear tooth spalling on the time-varying meshing stiffness was considered. Ryali and Talbot 21 proposed an improved dynamic load distribution model of a PGS, which was not needed to calculate the mesh stiffness and transmission error. Chen et al. 22 studied the effect of the sun gear tooth crack on the vibrations of the PGS with the bearing clearance. Lai et al. 23 established a dynamic model for the PGS with a floating ring gear. The rotational DOF was free in their work. Zhang et al. 24 established a dynamic model for the PGS with the journal bearing and studied the effect of the journal bearing error on the PGS load-sharing characteristics. The flexibility of the ring gear was considered by using the Euler Bernoulli beam element. Pfeiffer 25 studied the dynamics of a Ravigneaux PSG. Liu et al. 26 proposed a PGS dynamic model considering the flexible ring and carrier. Moreover, the electric motor torque fluctuation is considered in their work. Mo et al. 27 established a dynamic model for a PGS with the flexible support and floating sun gear. Based on the dynamic model, they studied the PGS vibrations and load-sharing characteristics. Yang et al. 28 analyzed the effects of the cyclic load and random wind load on the vibrations of the PGS in the wind turbines. However, they only considered the torsional vibrations of the PGS. Westphal et al. 29 investigated the effects of the axis misalignments on the PGS vibrations based on an experimental method. Wang et al. 30 studied the vibrations of a PGS with thin-walled ring gear considering the ring gear flexibility. In their work, the planetary bearing was regarded as a spring-damping system and the bearing nonlinear characteristics were ignored. Zhang et al. 31 established a rigid-flexible coupling dynamics model for the planetary gearbox and analyzed the fault mechanism for the PGS under speed-varying conditions. The planetary bearing nonlinear characteristics were also ignored. Dai et al. 32 investigated the mesh phasing modulation of PGS caused by position errors. The simulation results were compared with the experimental results to validate the correctness of the proposed model. It should be noted that although the research subjects in references [2,15,24] are double-ring Ravigneaux PSG, they did not study the effect of sun gear axial position on it's vibrations.
Based on the above literature review, it can be observed that most previous works focused on the conventional PGSs, which consist of one sun gear, several planets, one ring gear, and one carrier. Few works have been conducted on the vibrations of the double-row PGSs, which consists of one sun gear, several long planets, several short planets, two ring gears, and one carrier. Furthermore, due to the significantly wider tooth width of the long planet compared to the sun gear, the axial meshing position between the sun gear and the long planet can be adjusted. The vibrations of the PGS vary with different axial meshing positions. The excessive vibration can affect the normal operation of the double-row PGS; and it can also impact the operation of other parts connected to the double-row PGS. 33 By optimizing the axial position of the sun gear, the vibrations of the PGS can be reduced. Therefore, this work establishes a dynamic model for the double-row PGS and studies the effect of the sun gear axial position on the vibrations of PGS. The effect of the sun gear axial position on the vibrations of the double-row PGS under two typical operating conditions are investigated. Moreover, a vibration suppression method is proposed to guide the double-row PGS actual operation.
Problem description
Figure 1 shows the schematic diagram of the studied double-row PGS in this work. The double-row PGS consists of one sun gear, one carrier, one short planet, one long planet, and two ring gears. The rotational degree of freedom (DOF) of the sun gear is constrained and ring gear #1 is floating. The ring gear #2 is the input component and the carrier is the output component. The tooth width of the long planet is larger than the one of the sun gear. Generally, the symmetry plane of the sun gear and the planet in the direction of tooth width coincides. However, the meshing force between the long planet and ring gear, as well as that between the long planet and short planet, may not be equal. When the symmetry plane of the sun gear and the planet in the direction of tooth width coincide, the meshing forces will generate an overturning moment, which affects the stability and vibrations of the double-row PGS. On the other hand, an appropriate axial position of the sun gear can enhance the stability and reduce vibrations of the double-row PGS.

Schematic diagram of the double-row PGS. (a) Front view and (b) A–A section view. PGS: planetary gear set.
It is assumed that the sun gear is rotationally fixed and can only be moved axially by the amount Az. Then the double-row PGS has two drive transfer paths. The first drive transfer path is ring gear #2–long planet–carrier or in the opposite direction. When ring gear #2 is the input element, carrier is the output element, sun gear is fixed, and ring gear #1 is the free element, then the DOF of such a system is

The gear ratio is

The second drive transfer path is ring gear #1–short planet–long planet–carrier or in the opposite direction. When ring gear #1 is the input element, carrier is the output element, sun gear is fixed, and ring gear #2 is free element, then the DOF of such a system is

The gear ratio is

It should be noted that the first drive transfer path is ring gear #2–long planet–carrier is the studied case in this work.
Double-row PGS modeling
Double-row PGS dynamic modeling
The double-row PGS dynamic model is shown in Figure 2, which is established in SIMPACK software. The double-row PGS consists of a sun gear, three short planets, three long planets, and two ring gears. The ring gear #2 is connecting with the input shaft. The input torque is applied to the ring gear #2. The carrier is connected to the output shaft and the output torque is applied to the carrier. The rotational motion of the carrier is free. The rotational motion of the sun gear is constrained, but the sun gear is floating in z direction. Moreover, the ring gear #1 is floating (the rotational motion is free). The gear meshing pair is modeled by the #225: the gear Pair force element, the relevant method is given in the Double-row PGS dynamic modeling section. By varying the axial coordinates of the sun gear joint, the effect of the sun gear axial position on the double-row PGS vibrations can be studied. It should be noted that the planets are supported by the cylindrical roller bearings (CRBs) and the other components are supported by the deep groove ball bearings (DGBs). In this work, Az is adapted to describe the sun gear position, as shown in Figure 1.
A double-row PGS dynamic model. PGS: planetary gear set.
Gear meshing force calculation method
The gear tooth geometry is shown in Figure 3. Based on the Weber–Banaschek formula, the mesh stiffness is calculated by the following equation
34







Gear tooth geometry parameters in Weber–Banaschek formula.
Then, the meshing force can be given by

Bearing supporting force
The bearing contact force of the DGB is calculated by


As shown in Figure 4, the contact deformation between the ball and bearing ring δj is


Schematic of the bearing deformation.
The bearing supporting force is calculated by

The bearing contact force of the CRB is


Results and discussions
In this work, the effect of the sun gear axial position on the double-row PGS vibrations under two operating conditions is investigated. The operating conditions are presented in Table 1. The gear structural parameters of the double-row PGS are given in Table 2; and the bearing structural parameters are given in Table 3.
The operating condition parameters.

Structural parameters of the double-row planetary gear set.

Bearing structural parameters.

CRB: cylindrical roller bearing; DGB: deep groove ball bearing.
Time-varying mesh stiffness analysis
The time-varying mesh stiffnesses of the double-row PSG are given in Figure 5. The rotational speed of ring #2 is 78.32 rad/s, the rotational speed of long planet is 138.29 rad/s, and the rotational speed of carrier is 54.33 rad/s. The meshing period of sun gear-long planet mesh pair is 0.00356 s; the meshing period of long–short planets mesh pair is 0.003402 s; and the meshing period of long planet–ring gear mesh pair is 0.003401 s. The time-varying mesh stiffness of the sun gear-long planet mesh pair maximum (MAX) value is 1.355 × 109 N/m; and its minimum (MIN) value is 7.318 × 108 N/m. The time-varying mesh stiffness of long-short planets mesh pair MAX value is 1.528 × 109 N/m and its MIN value is 8.658 × 108 N/m. The time-varying mesh stiffness of short planet–ring gear mesh pair MAX value is 1.995 × 109 N/m and its MIN value is 1.144 × 108 N/m.

Time-varying mesh stiffness of the (a) sun gear-long planet mesh pair, (b) long–short planets mesh pair, and (c) long planet-ring gear mesh pair.
Time-domain vibrations of the double-row PGS
Figure 6 shows the ring gear #2 angular accelerations, ring gear #2 accelerations in x direction, and sun gear accelerations in z direction under operating condition 1. The root mean square (RMS) value of ring gear #2 angular accelerations is 1508.33 rad/s2 and its peak-to-peak (PTP) value is 1.278 × 104 rad/s2. The RMS value of ring gear #2 accelerations in x direction is 258.462 m/s2 and its PTP value is 2.213 × 103 m/s2. The RMS value of sun gear accelerations in z direction is 151.59 m/s2 and its PTP value is 1226.09 m/s2.

Time-domain vibrations of the double-row PGS under operating condition 1. (a) The ring gear #2 angular accelerations, (b) ring gear #2 accelerations in x direction, (c) sun gear accelerations in z direction, and (d) ring gear #2 accelerations spectrum in x direction. PGS: planetary gear set.
Figure 7 shows the ring gear #2 angular accelerations, ring gear #2 accelerations in x direction, and sun gear accelerations in z direction under operating condition 2. The RMS value of ring gear #2 angular accelerations is 1.217 × 103 rad/s2 and its PTP value is 8.854 × 103 rad/s2. The RMS value of ring gear #2 accelerations in x direction is 117.647 m/s2 and its PTP value is 1.413 × 103 m/s2. The RMS value of sun gear accelerations in z direction is 116.43 m/s2 and its PTP value is 841.46 m/s2.

Time-domain vibrations of the double-row PGS under operating condition 2. (a) The ring gear #2 angular accelerations, (b) ring gear #2 accelerations in x direction, (c) sun gear accelerations in z direction, and (d) ring gear #2 accelerations spectrum in x direction. PGS: planetary gear set.
Effect of the sun gear axial position on its own vibrations
The effect of the sun gear axial position on its own vibrations under operating condition 1 is plotted in Figure 8. Figure 8(a) shows the effect of the sun gear axial position on the RMS values of its own vibrations. The RMS value of the sun gear vibrations in z direction generally decreases with the increment of the Az. Moreover, the RMS value decreases dramatically when Az = 6 mm. Figure 8(b) shows the effect of the sun gear axial position on the PTP values of its own vibrations. The PTP value of the sun gear vibrations in z direction generally decreases with the increment of the Az. Moreover, the PTP value also decreases dramatically when Az = 6 mm. It can be found that the change pattern of the PTP value with Az is consistent with the one of the RMS value with Az.

Effect of the sun gear axial position on its own vibration in z direction under operating condition 1.
Furthermore, when Az is <6 mm, the sun gear axial position has a significant effect on the sun gear vibrations. As Az increases, the RMS and PTP values of sun gear vibrations decrease dramatically. However, when Az is larger than 6 mm, the sun gear axial position has a minor effect on the sun gear vibrations.
The effect of the sun gear axial position on its own vibrations under operating condition 2 is plotted in Figure 9. Figure 9(a) shows the effect of the sun gear axial position on the RMS values of its own vibrations. The RMS value of the sun gear vibrations in z direction decreases with the increment of the Az. Figure 9(b) shows the effect of the sun gear axial position on the PTP values of its own vibrations. The PTP value of the sun gear vibrations in y direction generally decreases with the increment of the Az. The PTP value of the sun gear vibrations in x direction generally decreases with the increment of the Az. Similar to the results under operating condition 1, the PTP value also decreases dramatically when Az = 6 mm.

Effect of the sun gear axial position on its own vibration in z direction under operating condition 2.
Furthermore, the sun gear axial position has a relatively significant effect on the sun gear vibrations when Az is <6 mm, which is similar to the results under operating condition 1. The difference is that the axil position still has a relatively significant effect on the sun gear RMS value when Az is larger than 6 mm.
Effect of the sun gear axial position on the ring gear #2 vibrations
The effect of the sun gear axial position on the ring gear #2 vibrations under the operating condition 1 is plotted in Figure 10. Figure 10(a) shows the effect of the sun gear axial position on the RMS values of the ring gear #2 angular accelerations. The RMS value decreases with the increment of Az when Az is <18 mm; and the RMS value increases with the increment of Az when Az is larger than 18 mm. Moreover, the sun gear position has a relatively significant effect on the angular accelerations RMS value of the ring gear #2 when Az is <18 mm. Figure 10(b) shows the effect of the sun gear axial position on the PTP values of the ring gear #2 angular accelerations. The PTP value generally decreases with the increment of Az when Az is <18 mm; and the PTP value generally increases with the increment of Az when Az is larger than 18 mm. Figure 10(c) shows the effect of the sun gear axial position on the RMS values of the ring gear #2 accelerations in x directions. The RMS value generally decreases with the increment of Az. The sun gear position has a relatively significant effect on the acceleration RMS value of the ring gear #2 in y direction when Az is <18 mm; and the RMS value decreases significantly when Az is <18 mm. Figure 10(d) shows the effect of the sun gear axial position on the PTP values of the ring gear #2 accelerations in x directions. The PTP value generally decreases with the increment of Az; and it only has an increment when Az = 18 mm.
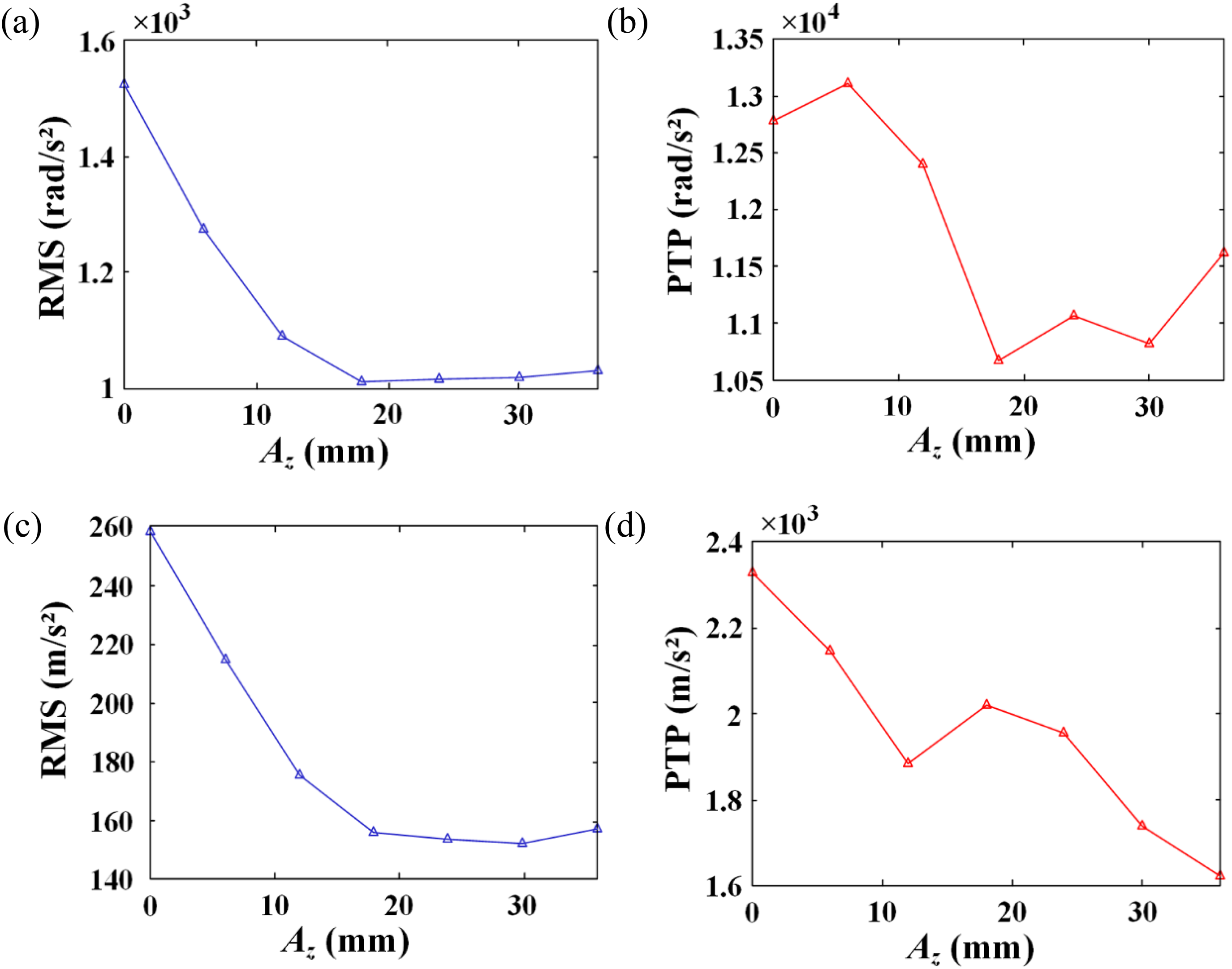
Effect of the sun gear axial position on the ring gear #2 vibrations under operating condition 1. (a) The RMS values of the ring gear angular acceleration, (b) PTP values of the ring gear angular acceleration, (c) RMS values of the ring gear acceleration in x direction, and (d) PTP values of the ring gear acceleration in x direction. PTP: peak-to-peak; RMS: root mean square.
The effect of the sun gear axial position on the ring gear #2 vibrations under the operating condition 2 is plotted in Figure 11. Figure 11(a) shows the effect of the sun gear axial position on the RMS values of the ring gear #2 angular accelerations. The sun gear axial position has a minor effect on the RMS value of the ring gear #2 angular accelerations when Az is larger than 12 mm. The RMS value of the ring gear #2 angular accelerations has a significant increment when Az = 6 mm. Figure 11(b) shows the effect of the sun gear axial position on the PTP values of the ring gear #2 angular accelerations. The sun gear axial position generally has a minor effect on the PTP value of the ring gear #2 angular accelerations. Overall, the PTP value of the ring gear #2 angular accelerations is relatively small when Az is <18 mm. Figure 11(c) shows the effect of the sun gear axial position on the RMS values of the ring gear #2 accelerations in x direction. Similar to the results of angular accelerations, the sun gear axial position has a minor effect on the RMS values of the ring gear #2 accelerations in x directions when Az is larger than 12 mm; and the RMS values of the ring gear #2 accelerations in x directions has a significant increment when Az = 6 mm. Figure 11(d) shows the effect of the sun gear axial position on the PTP values of the ring gear #2 accelerations in x direction. The sun gear axial position generally has a minor effect on the PTP value of the ring gear #2 accelerations in x direction.

Effect of the sun gear axial position on ring gear #2 vibrations under operating condition 2. (a) The RMS values of the ring gear angular acceleration, (b) PTP values of the ring gear angular acceleration, (c) RMS values of the ring gear acceleration in x direction, and (d) PTP values of the ring gear acceleration in x direction. PTP: peak-to-peak; RMS: root mean square.
Compare with Figures 8 to 11, it can be found that the vibrations of the ring gear and the sun gear are relatively small when Az is in the range of 12 to 18 mm. When Az is in the range of 12 to 18 mm, the RMS values of the ring gear and sun gear vibrations are minimal; and their PTP values are not large. At this time, the vibrations of the double-row PGS are relatively small under both operating conditions. Thus, in practical situations, it is advisable to control the sun gear axial position within this range.
Conclusions
This work establishes a dynamic model of a double-row PGS in the SIMPACK software. The dynamic model considers the mesh forces of the gear pairs and the supporting forces of the bearing. The main conclusions are given as follows:
The RMS and PTP values of the sun gear vibrations in y direction generally decrease with the increment of Az. The RMS and PTP values of the ring gear #2 vibrations decrease with the increment of Az when Az is <18 mm; and the RMS value increases with the increment of Az when Az is larger than 18 mm. When Az is in the range of 12 to 18 mm, the RMS values of the ring gear and the sun gear vibrations are minimal; and their PTP values are not large. In this range, the double-row PSG has less vibration, which can significantly improve the reliability and operational stability of the double-row PSG. Thus, in practical situations, it is advisable to control the sun gear axial position within this range.
The assembly associated with the double-row PGS will also have vibrations; and the coupling effect is very complex. However, the study of the coupling mechanism is very important, which can be helpful for vibration control in the system level. Further studies can be conducted in this area.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.