
Abstract
The development of tunneling equipment still lags behind, limiting rapid and accurate tunneling and restricting efficient production in coal mines. Thus, improving the reliability and design of roadheaders becomes essential. As the shovel plate is an essential part of a roadheader, improving its parameters can increase the roadheader performance. The parameter optimization of roadheader shovel plate is multi-objective optimization. Because of conventional multiobjective optimization requires strong prior knowledge, often provides low-quality results, and presents vulnerability to initialization and other shortcomings when used in practice. We propose an improved particle swarm optimization (PSO) algorithm that takes the minimum Euclidean distance from a base value as the evaluation criterion for global and individual extreme values. The improved algorithm enables multiobjective parallel optimization by providing a non-inferior solution set. Then, the optimal solution is searched in this set using grey decision to obtain the optimal solution. To validate the proposed method, the multiobjective optimization problem of the shovel-plate parameters is formulated for its solution. Before optimization shovel-plate most important parameters l is the width of the shovel plate
Keywords
Introduction
Coal accounts for more than 25% of the global primary energy consumption. 1 For example, according to the statistics of the National Energy Administration in 2018, the raw coal output in China was 3.55 billion tons, 2 and 90% was mined by well workers, requiring extensive tunneling. In mining, tunneling and transportation are major determinants of coal production, and the performance of tunneling machines directly affects roadway tunneling. The equipment for underground mining is being continuously improved, and the mining imbalance caused by low tunneling efficiency has become the main problem in large coal mines. 3 The development of tunneling equipment still lags behind, limiting rapid and accurate tunneling and restricting efficient production in coal mines. Thus, improving the reliability and design of roadheaders becomes essential.
Many scholars have studied roadheaders. Shaffer and Stentz 4 established a mathematical relation between the working parameters of a roadheader and the roadway section size. Li et al. 5 studied the cutting load of a roadheader. Li 6 and Guo et al. 7 investigated the structure, load, and motion parameters of the roadheader cutting head. Keles 8 studied the driving machinery for constructing a coal mine in Turkey considering the instantaneous cutting rate and specific energy consumption. Bilgin et al. 9 studied geological and geotechnical factors affecting the performance of a roadheader in an inclined tunnel. Most studies have been focused on the load and specific energy consumption of the cutting head of roadheaders. On the other hand, the shovel plate is another main working component of a roadheader, and its working efficiency and life directly affect the roadheader working performance. Thus, improving the shovel plate can increase the roadheader performance. 10 Nevertheless, scarce studies are available on shovel-plate improvement.
Determining the best roadheader shovel-plate parameters is a multiobjective optimization problem. As such problems are common in engineering practice, their solution is of great scientific and practical significance. Conventional multiobjective optimization methods include constraint methods, weighted combination methods, and goal programming. 11 These methods transform multiple objective functions into a single objective by linear aggregation, and the resulting single-objective function is optimized. Nevertheless, these methods require prior knowledge and are problem-specific, often failing to achieve satisfactory results.12,13 Alternatively, particle swarm optimization (PSO) is an easy-tom-implement intuitive algorithm, and it has been successfully applied to various optimization problems.14,15 However, PSO can only find one optimal solution for an optimization problem, failing to handle multiobjective optimization. 16 To address this limitation, improved PSO algorithms have been devised.17–19 Moore and Venayagamoorthy 20 proposed a quantum PSO for combinational logic circuits. Mikki and Kishk 21 proposed a quantum PSO algorithm for optimizing electromagnetism problems. Leu and Yeh 22 proposed two grey automation strategies for PSO. Cheng et al. 23 proposed structural reliability optimization based on chaos PSO to optimize the design of frame structures. Zhang et al. 24 proposed a PSO algorithm based on the mixture of priority and simulated annealing sampling to handle the problem of hybrid assembly lines. Wei et al. 25 improved PSO based on a globally optimal leading-particle-selection strategy with individual disturbance for rolling schedule optimization of a five-stand tandem cold mill. Table 1 summarizes various PSO methods and their characteristic. References 17∼25 all change the search strategy or particle activity to change the PSO, but this paper changes the evaluation criteria.
Various PSO methods and their characteristic.

We propose it innovatively that an improved PSO algorithm based on the minimum Euclidean distance from a base value. The proposed algorithm provides the non-inferior solution set for multiobjective parallel optimization, and the optimal solution is searched in the set through grey decision. Multi-objective optimization is realized by combining two steps. It is only necessary to obtain the non-inferior solution by using improved PSO algorithm, rather than the current pursuit of obtaining the optimal solution by using PSO algorithm. In order to verify the validity of the above two-step optimization method (obtaining non-inferior and then grey decision), we apply this method to the multiobjective optimization of roadheader shovel-plate parameters, aiming to improve the load capacity and reduce the propulsive resistance. We analyze the roadheader performance before and after optimization, demonstrating the effectiveness and feasibility of the proposed method for multiobjective optimization. After multiobjective optimization combining the improved PSO algorithm and grey decision, the mass of the shovel plate decreases by 14.3%, while the propulsive resistance decreases by 6.62%, and the load capacity increases by 3.68%.
Multiobjective optimization model of roadheader shovel-plate parameters
Roadheader structure and operation
A roadheader consists of cutting, transportation, and displacement components as well as a fuselage, shovel plate, rear support, and other components, as shown in Figure 1. The cutting head rotates to cut through coal and rock, and the extracted material falls in front of the shovel plate driven by the displacement component. The shovel plate collects the coal and rock pile and moves the material to a transport component located inside the fuselage. The transportation component moves the collected material to the back of the fuselage.

Roadheader structure. 1) cutting head, 2) transportation component, 3) fuselage, 4) shovel plate, 5) displacement component, 6) rear support.
The shovel plate is an essential working part of the roadheader and considerably affects the roadheader performance, which can be increased by optimizing the shovel-plate parameters. 16 The cylinder lifts and lowers the shovel plate to adjust the angle of material loading and support the fuselage. Thus, the shovel-plate parameters should be properly designed to increase the roadheader performance.
Multiobjective optimization model
Considering the amount of material that can enter the chute of the first transport plane and the diagram of the shovel plate shown in Figure 2 and which the accumulation of coal and rock on the shovel surface. The load capacity can be obtained as follows:
Schematic diagram of shovel plate showing.
Consider the shovel plate pushing material, the compression, fracture, and shear resistance of coal and rock, and the migration resistance along the shovel surface. The schematic diagram for calculating the propulsive resistance is shown in Figure 3. Using material mechanics, ground mechanics, and related principles, the calculation of the propulsive resistance can be expressed as

Schematic diagram for propulsive resistance calculation.
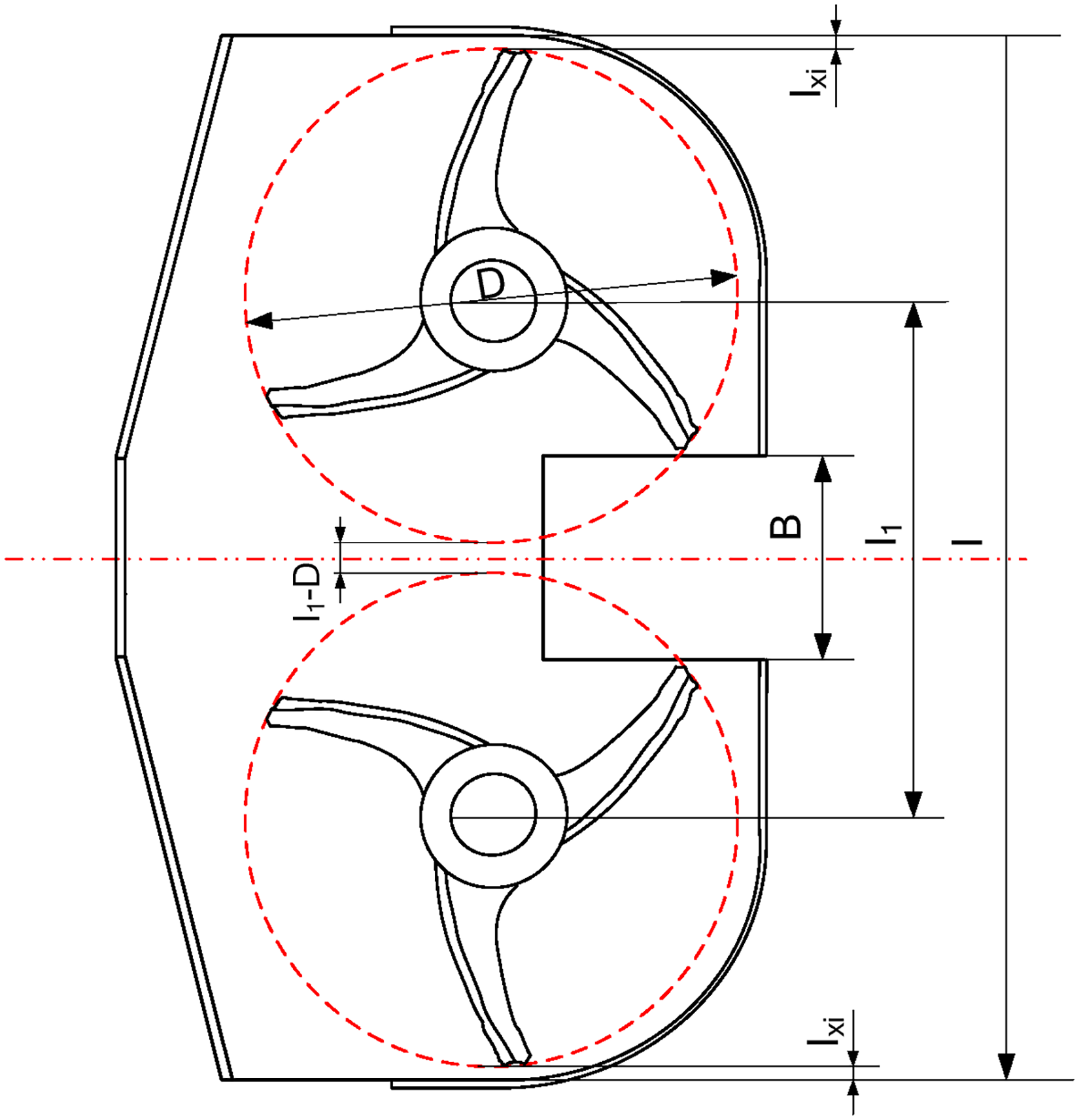
Considering the working characteristics and conditions and the structural characteristics of the shovel plate and the requirements of displacement are shown in Figure 4, shovel-plate structure, and drive motor installation size, the constraints of the shovel-plate parameters can be expressed as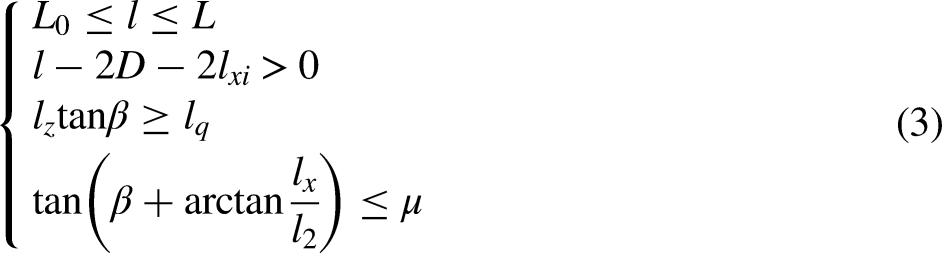

Schematic diagram of shovel plate requirements of displacement.
Under the constraints above, we aim to increase the load capacity and reduce the propulsive resistance to optimize the roadheader shovel-plate parameters. In this study, we considered the EBZ230 roadheader, whose basic parameters are B = 0.62 m, D = 1.52 m, and n = 33 r/min. Refer to literature
26
to determine the values of other parameters in Equations (1)∼(3). And then the loading capacity is minimized. The resulting multiobjective optimization model is given by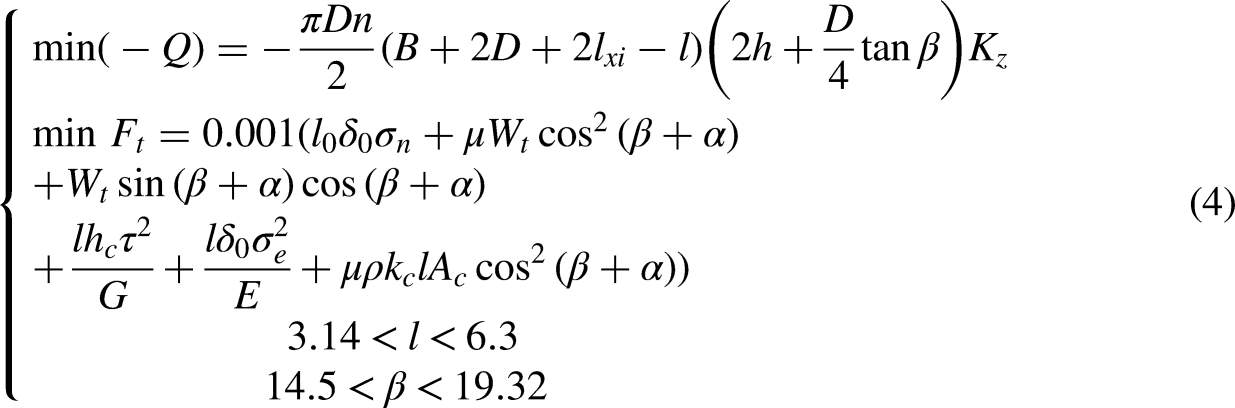
Multiobjective optimization based on improved PSO and grey decision
Improved PSO algorithm with minimum Euclidean distance from base value
We propose an improved PSO algorithm for multiobjective optimization problems. For the optimization degree of the objective function and the original value of each objective function, which can be obtained from the parameter values before optimization, the minimum Euclidean distance between the population and base value is the evaluation criterion of global and individual extrema. The improved PSO allows to perform simultaneous optimization for multiple objective functions by providing a non-inferior solution set.
The improved PSO algorithm proceeds as follows, is shown in Figure 5:
Initialize the particle swarm. Given population size N, randomly generate position X of the initial particle, its velocity V, accelerated factors Formulate the objective functions for minimization. Transform the objective function for maximization into a minimization function by adding a negative sign. Keep the objective function for minimization unchanged. Calculate fitness value. Substitute position X of the particle into each objective function Iterative optimization.
While For i = 1–N: For j = 1–n: Substitute particle swarm position X into each objective function and calculate the value of each objective function. End for. Compose the values of the objective function into a sequence of objective vectors. The corresponding particles form a vector series of non-inferior solutions, that is, a two-dimensional array with dimension of the population size multiplied by the number of iterations and listed as the number of objective function variables. End for. Calculate the corresponding particle of Update particle swarm position X and velocity V using the corresponding formulas.
End while. Stored the non-inferior solution of each generation.
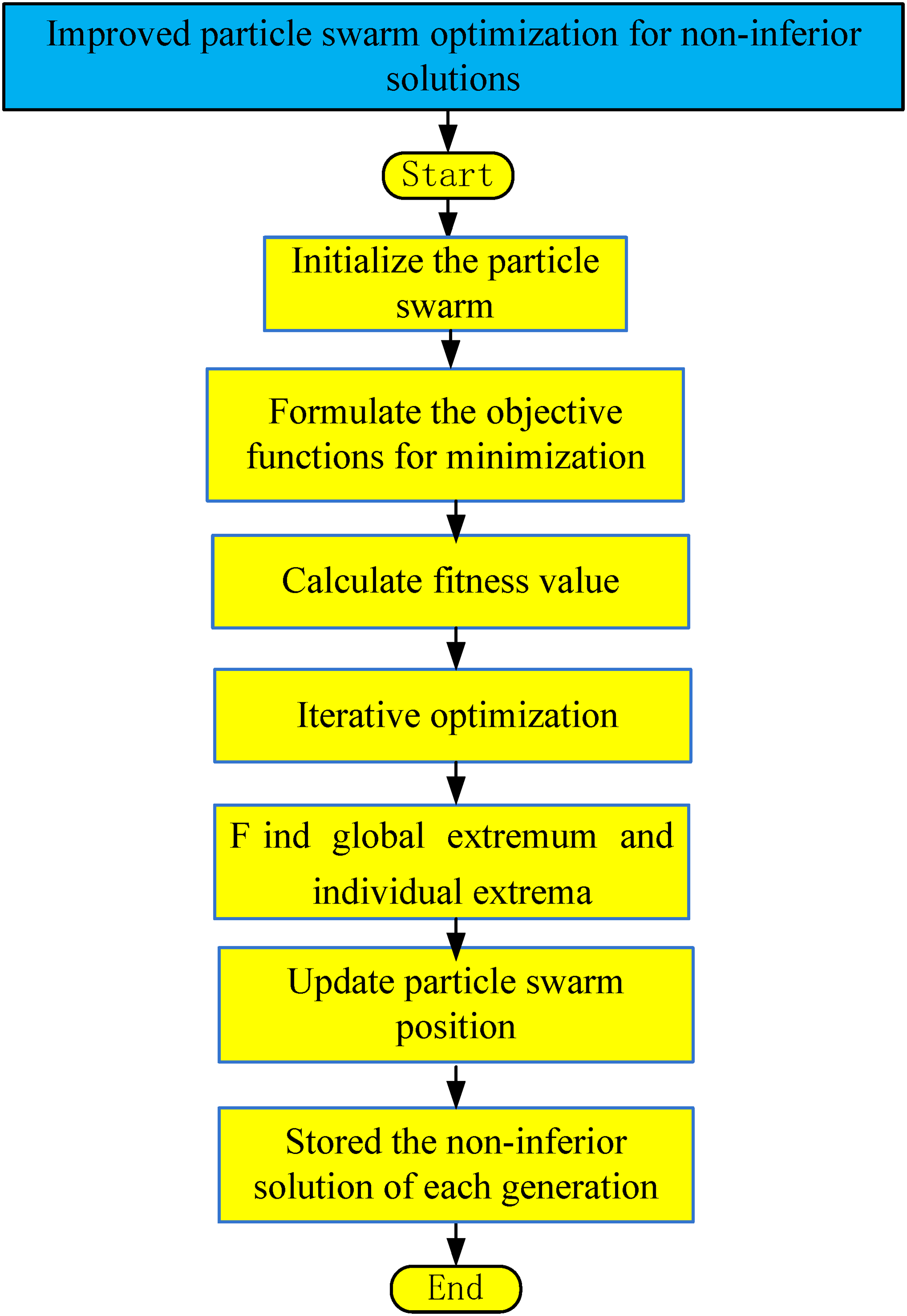
The improved PSO algorithm proceeds.
Grey decision
Grey decision requires few samples, provides inexpensive computations and is easily implemented, being widely used in many fields such as natural sciences, social sciences, and economics. 27 The grey correlation degree between various factors can be used to determine an index weight, and the weighted grey relational degree can be considered as an evaluation criterion, establishing a multiobjective decision-making model. 28
Grey decision proceeds as follows:
Decision matrix and its initialization. Let the scheme set be Label matrix A Calculation of scheme correlation degree. The correlation coefficient between Determine weight of factor index. The most important factors affecting the scheme are selected as parent indices. Their index values are denoted as Calculate the correlation coefficients between Compute the average across columns of matrix Y, Grey weights Calculate the degree of weighted grey correlation between scheme Make the decision. Weighted grey relational degree
The non-inferior solution set for evaluation is obtained from the improved PSO. Then, grey decision is applied to the set for determining the optimal solution.





Optimization and results
We applied the proposed multiobjective optimization method combining the improved PSO and grey decision to optimize roadheader shovel-plate parameters following the procedure shown in Figure 6.

Multiobjective optimization combining PSO and grey decision.
Optimization proceeds as follows:
Set basic parameters of improved PSO algorithm. In this study, we set accelerated factor Apply improved PSO algorithm and store non-inferior solution set. In this study, we executed improved PSO, obtaining 2000 non-inferior solutions. The accumulation regularity of several non-inferior solutions obtained through optimization is shown in Figure 7.

Accumulation regularity of non-inferior solutions throughout optimization.
Figure 7 shows that the trend of non-inferior solutions. The length of the shovel plate gradually decreases from a large value until convergence, and its inclination angle changes in an approximate range of 16°–18°. Consistent with the optimization objectives, the load capacity converges after gradually increasing, and the propulsive resistance gradually decreases until convergence to a small value. The distribution of non-inferior solutions agrees with the overall optimization goal of improving the load capacity and reducing the propulsive resistance. The optimization trends are reasonable, indicating the effectiveness of the improved PSO algorithm.
Apply grey decision to find the optimal solution. The load capacity is a benefit indicator, while the propulsive resistance is a cost index. In this study, we used a MathWorks MATLAB program to simultaneously process the 2000 non-inferior solutions obtained by the improved PSO algorithm. First, a decision matrix was formed and initialized. Then, we calculated the scheme correlation degree, the weights of the factor indicators, and the weighted grey correlation degree obtaining the optimal solution.
To reflect the difference before and after grey decision, Table 2 lists the optimal parameters for 20 out of the 2000 non-inferior solutions.
Parameters obtained from 20 non-inferior solutions.

Table 2 shows that the non-inferior solution satisfies the optimization degree condition, but the optimization degree of each objective function is inconsistent, and the number of non-inferior solutions simultaneously satisfying both objectives is low.
To reflect the difference before and after optimization, Table 3 lists the optimal and initial parameter values.
Roadheader shovel-plate parameters before and after optimization.

Table 3 shows that grey decision allows to determine the optimal solution in the non-inferior solution set. The two objective functions are optimized simultaneously, and in the sense of the grey correlation degree, both objective functions are optimal. After multiobjective optimization combining the improved PSO algorithm and grey decision, the mass of the shovel plate decreases by 14.3%, while the propulsive resistance decreases by 6.62%, and the load capacity increases by 3.68%.
In order to analyze the mechanical properties of shovel-plate, in the environment of ANSYS-Workbench, when the propulsive resistance is at its maximum, the process of propulsiving coal rock with the shovel plate before and after optimization was simulated. The shovel plate stress nephogram before and after optimization is shown in Figure 8.

Roadheader shovel plate stress nephogram before and after optimization. (a) before optimization (b) after optimization.
Figure 8 shows that the stress nephogram before and after optimization, the maximum stress at the front of the shovel plate before optimization is 103.04 MPa, after optimization is 85.69 MPa, after optimization the maximum stress of the shovel plate decreases by 16.8%.
The EBZ230 roadheader shovel plate has been mass produced before optimization, but optimization can further improve its load capacity, reduce its propulsive resistance and reduce its maximum stress.
Conclusion
We propose a multiobjective optimization method combining improved PSO and grey decision. Considering the multiobjective optimization of roadheader shovel-plate parameters as a representative example, we apply the proposed method, achieving a proper optimization effect. We can draw the following conclusions from this study:
An improved PSO algorithm based on the minimum Euclidean distance between a base value and the global extremum and individual extrema is proposed. The improved PSO algorithm performs parallel multiobjective optimization and provides a non-inferior solution set, obtaining 2000 non-inferior solutions. Then, grey decision is applied to find the optimal among the non-inferior solutions, obtaining the optimal parameters for the EBZ230 roadheader shovel plate, being l = 3.144 m and β = 16.88°. A comparative analysis before and after optimization reveals that the mass of the shovel plate decreases by 14.3%, its propulsive resistance decreases by 6.62%, its load capacity increases by 3.68%, and its maximum stress decreases by 16.8%. Therefore, both optimization goals, namely, increasing the load capacity and reducing the propulsive resistance, are achieved. The optimization results confirm the feasibility of multiobjective optimization combining improved PSO and grey decision. This method can be applied to multi-objective optimization of other devices. In this paper, the conventional parameters of PSO are used, the influence of PSO parameters on optimization results is not been studied. And the amount of data involved in grey decision making affects to the results, the specific impact is not been studied.
The name of parameters, symbols, and abbreviations
Q is the load capacity in cubic meters per minute (m3/min),
D is the outer diameter of the star wheel in meters (m),
n is the star wheel speed in revolutions per minute (r/min),
B is conveyor trough width in meters (m),
β is the inclination angle of the shovel plate in degrees (°),
Footnotes
Availability of data and material
All data generated or analyzed during this study are included in this published article.
Author contribution
Qiang Li wrote the manuscript and contributed significantly to the conception of the study, analysis and multiobjective optimization; Mengdi Gao revised the manuscript; Zhilin Ma helped perform the analysis of data.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the Innovative Research Team in Suzhou University(2018kytd01), Scientific Research Project of Anhui Universities (KJ2021A1106, 2022AH051378), Cooperative education project of the Ministry of Education (220604583025757), Natural Science Foundation of Anhui Province (2008085QE265, 2008085ME150), Online and offline hybrid course (szxy2022hhkc01), the Scientific Research Platform Open Project of Suzhou University (2022ykf30).
Natural Science Foundation of Anhui Province, Suzhou Science and Technology Project, Scientific Research Project of Anhui Universities, Scientific Research Platform Open Project of Suzhou University, (grant number 2008085QE265, 2019019, KJ2021A1106, KJ2021A1115, 2020ykf11, 2020ykf12).
Author biographies
Qiang Li was born in Yingshan, Hubei Province, China in 1987. He is a lecturer at Suzhou University and PhD candidate at the China University of Mining and Technology. His main research interest is rapid tunneling technology of tunnels and roadways.
Mengdi Gao was born in 1991.She received a PhD degree inmechanical and electronic engineering from the Hefei University of Technology, Hefei, China, in 2017. She is currently the Head of the 3D Printing Laboratory, School of Mechanical and Electrical Engineering, Suzhou University. She has published more than twenty academic papers, including in the Journal of Dynamic Systems, Measurement, and Control (ASME), IJAMT, and Energy Conversion and Management. Her current research interests include green design and manufacturing and 3D printing technology. Her current research interests also include manufacturing process condition monitoring, and low-carbon energy-saving optimization theory, multi-objective optimization and methods for stamping forming. She has been invited to be a reviewer for several SCI/EI journals.
Zhilin Ma was born in Bozhou City, Anhui Province, China in1991. He received a B.S. degree in mechanical design manufacture and automation from Central South University Of Forestry and Technology, Changsha in 2016, and he received a M.S. degree in mechanical design and theory from Hefei University Of Technology, Hefei in 2019.Since 2019, he has been an Assistant at the College of Mechanical and Electronic Engineering, Suzhou University. His research interests include multi-objective optimization, motor driving, vibration and noise, and sustainable manufacturing.