
Abstract
The battle against air pollution in China persists, and haze remains over cities. Whether industrial robots, as the core technology of intelligent manufacturing, can improve city air quality in the process of production has not been determined. Using the International Federation of Robotics data and Chinese city air pollution data (2013–2018), this study finds that industrial robots significantly reduce city air pollution levels (PM2.5, PM10, and SO2), which remains robust after addressing endogeneity. The mechanism of action lies in the synergistic benefits of industrial robots in reducing city air pollution levels by effectively improving energy use efficiency and promoting green technological innovation. Heterogeneity analysis suggests that industrial robots, as the incarnation of green technology, can be an effective alternative tool to green policies, such as low-carbon piloting, resource planning, and environmental regulation. This study empirically confirms that industrial robots are environment-friendly technologies that can provide new policy ideas to promote air pollution prevention and control in the industrialization process.
Keywords
Introduction
The haze that hangs over cities not only has a huge impact on production and life but also poses a serious threat to human health, exacerbates climate change, and damages the ecological environment. China attaches great importance to air pollution control, and according to the Three-Year Plan on Defending the Blue Sky released by the State Council in 2018, it was planned that by 2020 the total national SO2 emissions would be reduced by more than 15% compared to 2015, the average PM2.5 concentration in cities exceeding the standard would be reduced by more than 18%, and the percentage of heavily and severely polluted days would be reduced by more than 25%. In fact, these three indicators decreased by 82.9%, 28.8%, and 62.5%, respectively, in 2020, exceeding the planned targets, and PM10 concentration also decreased by 39.8%. Despite these reductions, most air pollutant concentrations in Chinese cities remain above the levels set by the Air Quality Guidelines (AQG) (Figure 1), which can drive the formation of heavily polluted weather under unfavorable meteorological conditions. Thus, it is necessary to continue to focus on energy and industrial restructuring and the promotion of green and high-quality development in order to eliminate heavy pollution.

Dynamic changes of concentrations of three air pollutants in China (2013–2021).
Industrial robots refer to multi-joint manipulators or high degree-of-freedom robots employed in industrial activities, such as serial manipulators widely used in the industrial assembly, 1 high-speed parallel robots widely used in industrial production lines such as food and pharmaceuticals, 2 and collaborative robots that maximize the collaborative advantages between humans and robots. 3 As a key device for intelligent manufacturing, industrial robots are expected to aid the environmental improvement of industrial systems in cities, and the combined and coordinated development of industrial economy and environmental governance. According to the International Federation of Robotics (IFR), robots are predicted to contribute to achieving 13 sustainable development goals (out of the 17 set by the United Nations), including clean energy and climate action that are related to environmental governance. 1
IFR stated that the development of robot density in China has been the most dynamic worldwide, especially after 2013. In 2013, there was a historical inflection point of negative labor supply growth in China and subsequent explosive growth in robot applications, with a steep increase in robot installations, surpassing Japan as the world's largest consumer of industrial robots and accounting for more than one-fifth of global sales (Figure 2). As of 2021, China has been the world's top industrial robotics market for eight consecutive years. 2 Meanwhile, Chinese robot manufacturers reached a turning point in 2013. According to Cheng et al., 4 the number of registered companies producing or researching robots in China doubled annually from 2013 to 2015.

Annual robot sales in China and the world.
Robotics development in China is also reflected at the policy level. As early as 2012, in the 12th Five-Year Plan, China included industrial robots as intelligent devices in its roadmap for the development of the intelligent manufacturing equipment industry. In 2013, China released its first policy document titled “Industrial Robotics” (Guidance on Promoting the Development of Industrial Robotics Industry), which elevated the development of the robotics industry to a national strategic level. Since then, industrial robotics development has been incorporated into the 13th and 14th Five-Year Plans, leading to China's digital development and intelligent upgrading. Whether in terms of practical applications or policy guidance, China's focus and determination on industrial robotics development and technological innovation are evident.
Notably, the role of industrial robots in overcoming air pollution, as a representative frontier technology in the booming city industrial system, has not been fully justified. Therefore, we examine the impact of industrial robots on cities' air pollution levels and explore the mechanisms and regional heterogeneity of their impact to explore city-level drivers of pollution reduction beyond pollution abatement policies. The contribution of this paper is in demonstrating the beneficial role of industrial robots in air pollution prevention and control at a Chinese city level, providing new ideas for the further promotion of the blue sky defense, and providing policymakers with suggestions that are in line with the trend of intelligence and the requirements of pollution reduction.
The innovations include a mechanism analysis from the perspective of automation and technology, which corroborates that industrial robots are the embodiment of green technology and can achieve synergistic benefits in reducing cities' air pollution levels by improving energy use efficiency and promoting green technology innovation. Another is a sample classification and heterogeneity analysis based on the relevance and policy value of cities' characteristics, taking into account the coupling and coordination of industrial robots with other environmental protection measures, which shows that industrial robots can be an effective alternative tool for green policies such as low-carbon piloting, resource planning, and environmental regulation.
Literature review
Since the introduction of the environmental Kuznets curve (EKC), there has been a proliferation of studies on how economic activities affect environmental pollution. Existing studies have analyzed the impact on environmental pollution and air quality in terms of economic growth, 5 population density,6,7 green policies, 8 urbanization,9,10 and industrial agglomeration.11,12 Among them, studies on the correlation between industrial development and environmental pollution have attracted significant attention owing to the high pollution and high-emission nature of industrial activities. Panayotou found that by decomposing the EKC, poor countries with low industrialization emit less pollution and that there is a J-shaped curve relationship between SO2 and industrial share when industrialization is in the range of 20%–40%, that is, SO2 pollution emissions increase significantly with industrialization in this range. 13 Li et al. found an inverted S-shaped curve relationship between industrialization and air pollution levels in China, which shows that increased industrialization in the low-level range exacerbates air pollution; however, when industrialization reaches a certain level, its continued increase can improve air quality, but continued industrialization at high levels leads to a serious rebound in air pollution. 14 The improvement in air quality under moderate industrialization may be attributed to technological progress and environmental regulation; however, this level of technology or regulation is not sufficient to cope with the pollution generated by high industrialization. This indicates that there are environmental governance bottlenecks in highly industrialized countries or regions, and new solutions to mitigate pollution rebound and breakthrough governance bottlenecks should be sought urgently.
Technological innovation is an important intermediary between industrial activities and environmental pollution, 5 can improve energy utilization by mitigating resource mismatch on the input side, and can improve productivity by optimizing production methods and upgrading manufacturing equipment on the output side, thus promoting the optimization and upgrading of industrial structure and the transformation of economic development.15–17 Many studies have provided new solutions from the perspective of integrating informatization and industrialization. As a combination of informatization, industrialization, and urbanization, smart cities have been proven by many studies to reduce environmental pollution, including SO2, PM2.5, and PM10.17–19 For example, through a study based on Chinese city panel data from 2004 to 2018, Cui and Cao found that smart city construction significantly reduced PM2.5 concentrations in local and surrounding non-pilot cities, and its effect on local pollution control was achieved by promoting city innovation, industrial optimization, and upgrading, driving technological progress, and increasing total factor productivity. 17 Information and communication technology (ICT), a key integrating technology in smart city construction, can significantly improve air quality in eastern China through information infrastructure improvement and energy efficiency improvement effects but is weak in central, western, and northeastern regions. 20
Admittedly, new technological innovations such as ICT are considered by many studies to be important ways to improve air quality and control environmental pollution. However, there is little literature on a systematic analysis of the impact of automation technologies on air quality. Theoretically, there are at least two mechanisms by which industrial robots impact air pollution: energy use efficiency and green technology innovation. The positive effects of energy use efficiency and green technology innovation on air pollution management have been confirmed by copious literature.21–29
In contrast, the literature on the impact of industrial robots on both is incomplete and relatively scarce. The existing literature analyzes the impact of industrial automation on energy efficiency, mainly at the national, industrial, or firm level, and lacks empirical evidence at the city level. For example, based on cross-sectional panel data from the Chinese industry, Liu et al. showed that industrial robots can improve energy efficiency by increasing output and reducing energy consumption and that this effect is more pronounced in energy-intensive industries such as paper and steel. 30 Based on a cross-country panel of manufacturing firms, Wang et al. showed that industrial robots can improve energy efficiency through technological effects and that this positive effect is amplified in the era of Industry 4.0, but this is only evident for non-renewable energy sources. 31 Based on a panel of industrial firms in China, Huang et al. showed that industrial robots can improve energy efficiency by increasing production rather than reducing energy consumption while emphasizing that this effect is insignificant for clean energy. 32
Moreover, the literature on the effects of industrial robots on green technology innovation is scarcer. Liu et al. confirmed that industrial robots promote technological innovation using cross-sectional panel data from the Chinese manufacturing industry, 33 and Yang et al. confirmed that intelligent manufacturing promotes green technology innovation using provincial panel data from the Chinese manufacturing industry. 34 In addition, based on cross-country panel data of the manufacturing industry, to the best of our knowledge, only Lee et al. provided empirical evidence that industrial robot applications significantly promote green technology innovation. 35
Among the existing empirical studies, the study by Luan et al. 36 is the closest to this study. They studied the impact of industrial robot stockpiles on air quality and climate change based on cross-country panel data from 1993 to 2019 and found that PM2.5 concentrations and other pollutant emissions increased with increasing industrial robot stockpiles, and the indirect promoting effect of energy consumption on PM2.5 emission accounted for up to 76.9%. This conclusion is opposite to the environmental management effect of technological innovation. Is an industrial robot, as a representative technology of automation, the driver of air degradation or the embodiment of green technology? The jury is still out.
In this paper, we provide conclusive and direct empirical evidence using data on robots and air pollution in Chinese cities. Additionally, based on the mechanistic routes shown in Figure 3, we explore the mechanisms underlying the effect of the application of industrial robots on cities' air pollution levels from two perspectives: energy use efficiency and green technology innovation.

Mechanistic routes of industrial robotic application to affect air pollution.
Data and methodology
Data
The data in this study came from IFR's industrial robot dataset, the industrial enterprise module of China's Second National Economic Census (2008), China Stock Market and Accounting Research Database, China Meteorological Data Service Centre, Chinese Research Data Services, and government work reports from various prefecture-level cities. It should be noted that the IFR dataset contains information on robot installations and stocks in productive and non-productive industries in 50 countries since 1993 and is able to cover 90% of the global industrial intelligent robot market installations. From this, we selected industrial robot inventory data for each industry in China from 2013 to 2018 and matched it with industrial enterprise data from the second national economic census to calculate the per capita robot inventory for each city.
Regarding the data selection period, we considered the following: first, as mentioned in the introduction, 2013 was considered the first year of widespread application and vigorous development of industrial robots in China. Second, in 2013, China implemented the Ambient Air Quality Standards to carry out air quality index (AQI) monitoring, which comprehensively covers the six air pollutant indicators of SO2, NOx, PM10, PM2.5, O3, and CO, and has been gradually extended to cover the entire country in subsequent years. Therefore, we selected 2013 as the starting year for the sample data. Third, after 2018, China started to fully implement the Three-Year Plan on Defending the Blue Sky, and a large number of actions were deployed nationwide for air pollution control, which may interfere with the results of this study. Therefore, we do not consider data after 2018.
Model
To examine the impact of industrial robots on cities' air pollution, the following econometric model was constructed:

Variables
City air pollution indicators (PM2.5, PM10, SO2), the dependent variables. In existing studies on city pollution, the following two types of indicators were mainly used as proxy variables for city pollution levels. The first is the pollutant emission indicators of industrial enterprises,16,18,37 because outdoor pollution mainly comes from industrial production processes; however, the enterprise pollution emission statistics are manipulable, and SO2 and fumes in industrial pollutant emissions are not sufficient to represent the air pollution level of the entire city. 19 The second type is the city six pollutants concentration index (AQI), 38 as such satellite monitoring data can more objectively reflect the actual level of city air pollution. Moreover, it is the same caliber as the AQG from the World Health Organization (WHO), which is more helpful in controlling the pollution governance process, where SO2 and PM2.5 concentrations are more commonly used as metrics.7,12,14 In addition, PM10, one of the causes of hazy weather, has a much higher annual average level in Chinese cities than the safety value set by WHO. Therefore, we selected PM2.5, PM10, and SO2 concentrations as representative indicators and constructed a logarithmic treatment to comprehensively measure the air pollution levels in cities and ensure the reliability of the empirical results.
Per capita robot inventory at the city level (Robot), the independent variable. As the robot data provided by the IFR are based on the industry level, to calculate the robot coverage situation in each city, we drew on the idea of Bartik
39
and the common practice in the existing literature40,41 to match the IFR dataset with industrial enterprise data from the Second National Economic Census (2008); thus, the per capita robot inventory was estimated for each city. The specific estimation method is as follows:

Level of output per capita (PGDP)
According to the EKC hypothesis, the output per capita and environmental pollution are closely related.
Industrial structure (IND)
It is obvious that the share of the secondary industry reflects the air pollution level to some extent, 5 but the boom of the tertiary industry also brings difficult air pollution problems, such as the transportation industry. 37 Therefore, we used the sum of the shares of the secondary and tertiary sectors to construct the city industrial structure variable.
Government scale (GOV)
Local governments are an important repository for implementing environmental protection policies. Bao and Liu argued that local government investment in air pollution control has increased, resulting in improving air quality. 42 We used the ratio of government expenditure to GDP to measure the size of local governments.
Internet development status (Internet), taken as a logarithm. The application of Internet technology can effectively achieve environmental regulation, and the integrated development of the Internet and pollution control is an effective way for cities to achieve green transformation in the information era. 43 We used the logarithm of the number of international Internet users to measure the status of Internet development in cities.
The sunshine duration (Sunshine) and precipitation (Rainfall), taken as logarithms. Referring to Li et al. 44 and Borck and Schrauth, 6 we included two control variables, sunshine duration, and precipitation, considering the effects of geographical conditions and meteorological variables. Statistical information on the main variables is presented in Table 1.
Statistical information on the variables.

Results
Baseline regression results
The baseline regression results in Table 2 show the effects of industrial robot applications on the concentrations of the three air pollutants. Overall, we found that the estimated coefficients of robot inventory per capita for all three air pollutant concentrations are negative at the 1% significance level after controlling for the city- and year-fixed effects. This suggests that industrial robot applications can significantly reduce the overall city air pollution levels while controlling for other variables. Specifically, an increase of one robot inventory per 1000 people reduced PM2.5, PM10, and SO2 concentrations in city air by 2.8%, 1.97%, and 2.68%, respectively. This suggests that fine PM (PM2.5) and exhaust gases (SO2) are more affected by industrial robotics than respirable particles (PM10), which may be related to the pollutant sources—PM2.5 and SO2 mainly originate from industrial production, daily power generation, and vehicle exhaust emissions; therefore, the emission intensity is more impacted by industrial robotics, while PM above 2.5 µm in PM10 mainly comes from direct emissions from pollution sources, such as wind-induced dust, chimneys, and vehicles. This type of PM outside the industrial system weakens the pollution reduction effect of the industrial robots. In contrast to existing studies, this study provides empirical evidence that industrial robots affect city-level air pollution levels in China.
Baseline regression results.
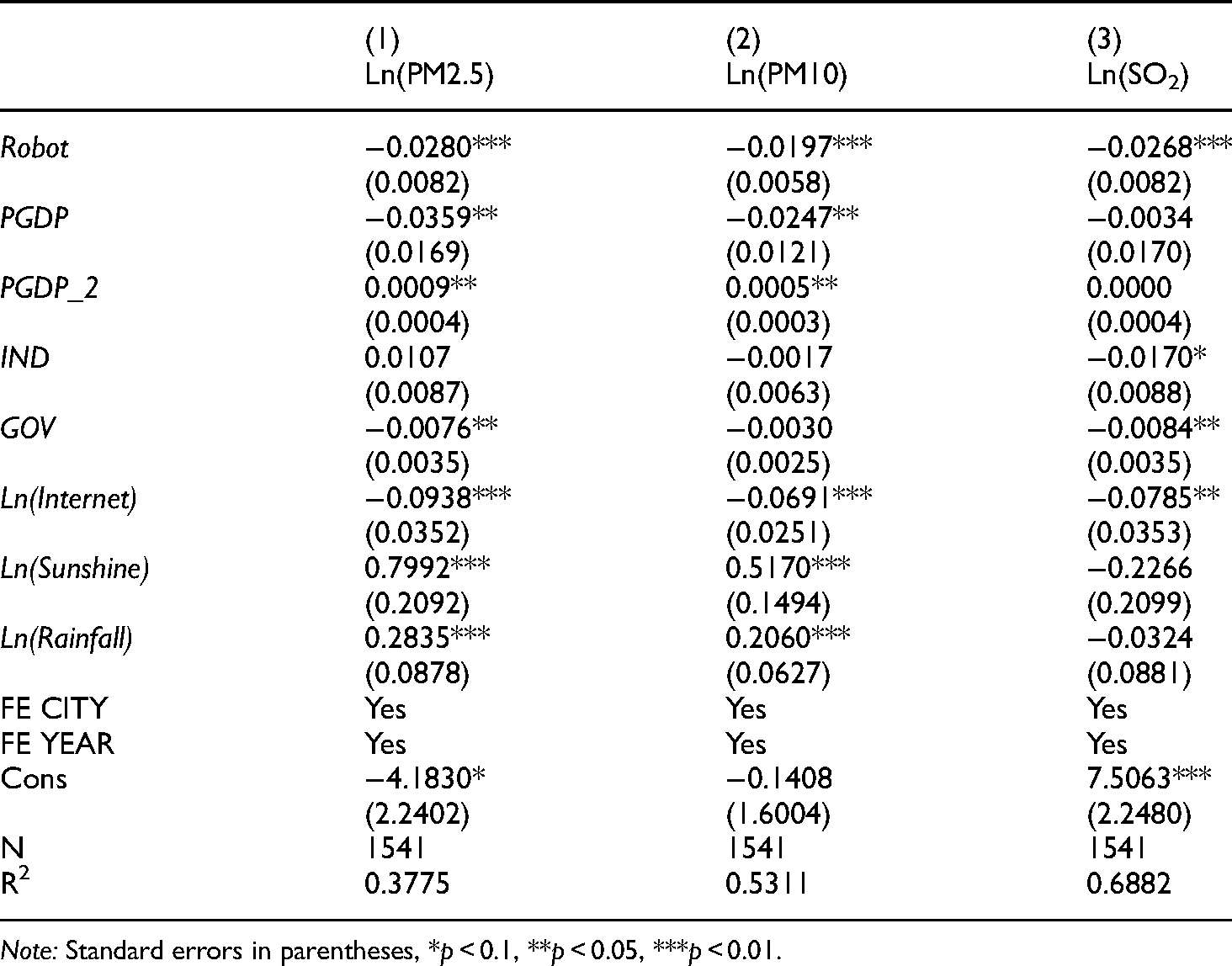
Note: Standard errors in parentheses, *p < 0.1, **p < 0.05, ***p < 0.01.
Noteworthy, the estimated results of the control variables are consistent with theoretical expectations or existing research findings. The significant reductions in PM concentrations were 3.59% (PM2.5) and 2.47% (PM10) for every 10,000 Yuan increase in per capita output, indicating that China is at the right side of the “inflection point” of the EKC model, that is, the stage where per capita output is negatively correlated with environmental pollution. This indicates that China's green transformation has begun to bear fruit in recent years. For every 1% positive change in industrial structure, SO2 concentration was significantly reduced by 1.7% in the cities. This is consistent with Stern's conclusion that industrial structure is the main factor influencing SO2 emissions. 45 Moreover, a possible explanation for the increase in the share of secondary and tertiary industries leading to a decrease in SO2 pollutant emissions is that industrial restructuring brings about environmental spillover effects that alter the impact of economic development on air pollution. 46 Each 1% increase in government size significantly reduced PM2.5 and SO2 by 0.76% and 0. 84%, respectively, which is consistent with Halkos and Paizanos, who concluded that government spending is significantly and negatively associated with SO2 emissions per capita. 47
For every 1% increase in the number of international Internet users, the PM2.5, PM10, and SO2 concentrations were significantly reduced by 0.0938%, 0.0691%, and 0.0785%, respectively. This indicates that Internet development helps reduce cities' air pollutant concentrations, and Internet application is an effective measure for optimizing cities' air quality. This is in line with Yang et al.'s finding that with the widespread use of the Internet; its impact on air pollution breaks through the tipping point and exhibits an environment-friendly nature. 43
Robustness tests
Instrumental variable estimation
We calculated the robot penetration in China by the major import source countries of robots (America, Japan, Germany, Sweden, and Korea) as an instrumental variable, drawing on Acemoglu and Restrepo. 40 Table 3 shows the results of the instrumental variables estimation. The estimated coefficient from the first stage shows that the coefficient of the instrumental variable is positive (0.1862) and significant at the 1% level, which is consistent with theoretical expectations. The weak instrumental variable test reveals that the F-statistic is 27, which exceeds the critical value of 10, and excludes the possibility that the selected instrumental variable is a weak instrumental variable, meaning that the instrumental variable selected in this study has excellent explanatory power for the original independent variable. As shown by the second-stage estimation, the estimated coefficients of robot inventory per capita are all significantly negative, further confirming that industrial robot applications can reduce cities' air pollution.
Instrumental variable estimation results.

The control variables are the same as in the baseline regression.
Standard errors in parentheses, *p < 0.1, **p < 0.05, ***p < 0.01.
Plausibly exogenous test of the instrumental variable
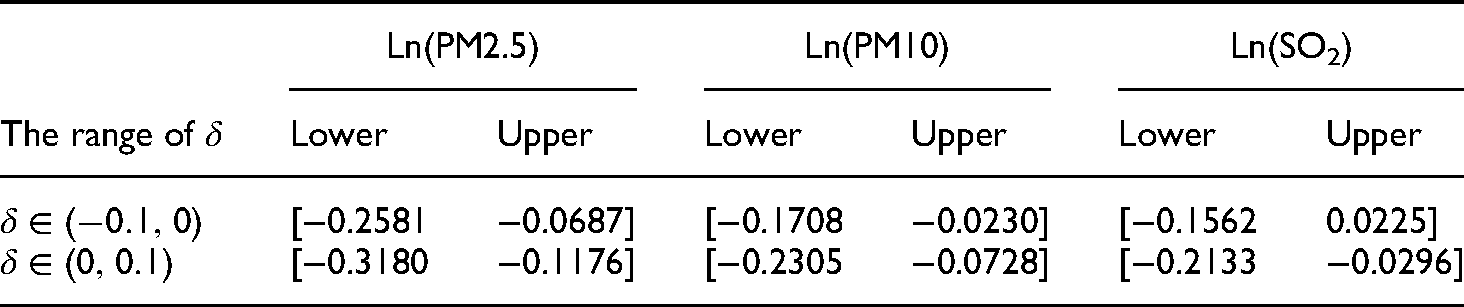
Considering that the instrumental variable used is more likely to be only plausibly exogenous rather than strict, the test was based on the Union of Confidence Intervals (UCI) proposed by Conley et al. 48 The results in Table 4 show that the estimated coefficients of “Robot” are relatively stable and remain robustly negative at high significance levels, even when the range of δ values is changed under the assumption that strict exogeneity of the instrumental variable is violated. Thus, the approximate exogeneity of “Robots of the import source countries” has little effect on the estimation results and is a reasonable instrumental variable.
The robust confidence intervals of “Robot” based on Conley et al. (2012).
Control of shocks from parallel policies
Considering the impact of pollutant control policies in recent years, the parallel policies of the Action Plan for Prevention and Control of Air Pollution (APPCAP), 3 the pollutant emissions trading pilot (PET), 4 and the comprehensive demonstration work on fiscal policies for energy conservation and emission reduction (FP) were controlled here. The results in the first three columns of Table 5 demonstrate that the pollution reduction effect of industrial robots still has significant importance and is even further amplified after controlling for three major parallel policy shocks. This indicates that industrial robot applications are well coupled with pollutant emission reduction policies and consistent with the policy trend of air pollution prevention and control governance. Moreover, APPCAP and PET have a significant and strong reduction effect on PM concentrations, confirming the effectiveness of China's major pollution reduction policies to improve air quality.
Robustness tests.
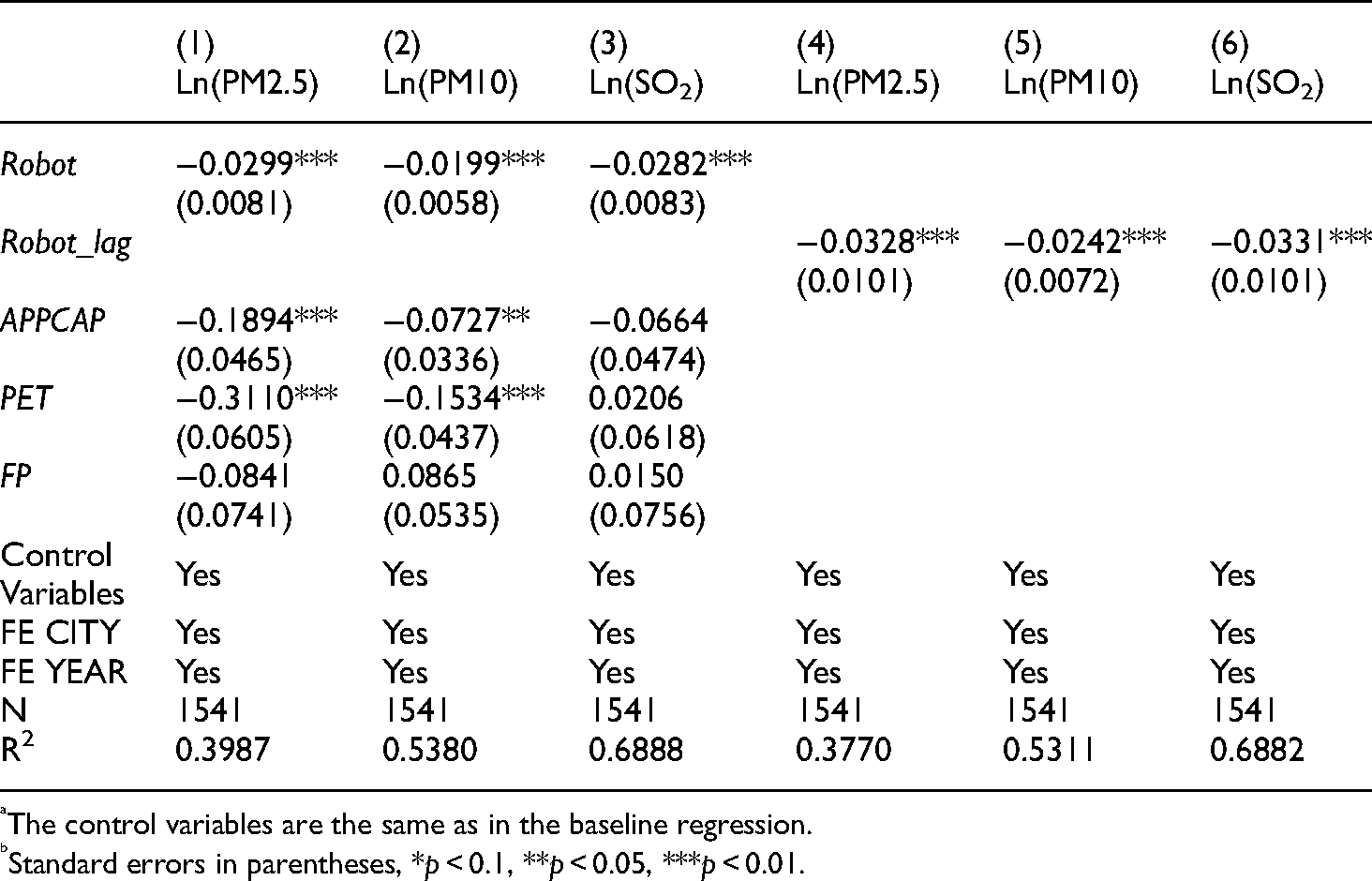
The control variables are the same as in the baseline regression.
Standard errors in parentheses, *p < 0.1, **p < 0.05, ***p < 0.01.
Adoption of the lagged one-period term of the independent variable
To avoid the potential risk of endogeneity caused by the correlation between the current period independent variable and the current period residual term, the lagged one-period term of the per capita robot inventory was used to replace its current period term. The estimation results in columns (4)–(6) of Table 5 show that there is still a significant negative correlation between the per capita robot inventory and the concentrations of the three air pollutants, with this negative effect somewhat larger than that of the baseline model, further confirming the core findings of this paper.
Mechanism exploration
Industrial robots, as the representative technology for automation, inherently possess the characteristics of efficiency and technology. Therefore, we selected two proxy variables, energy use efficiency, and green technology innovation to identify mechanisms for industrial robot application to reduce cities' air pollutant concentrations. The estimated results of the mechanism analysis are reported in Table 6.
Mechanism exploration.
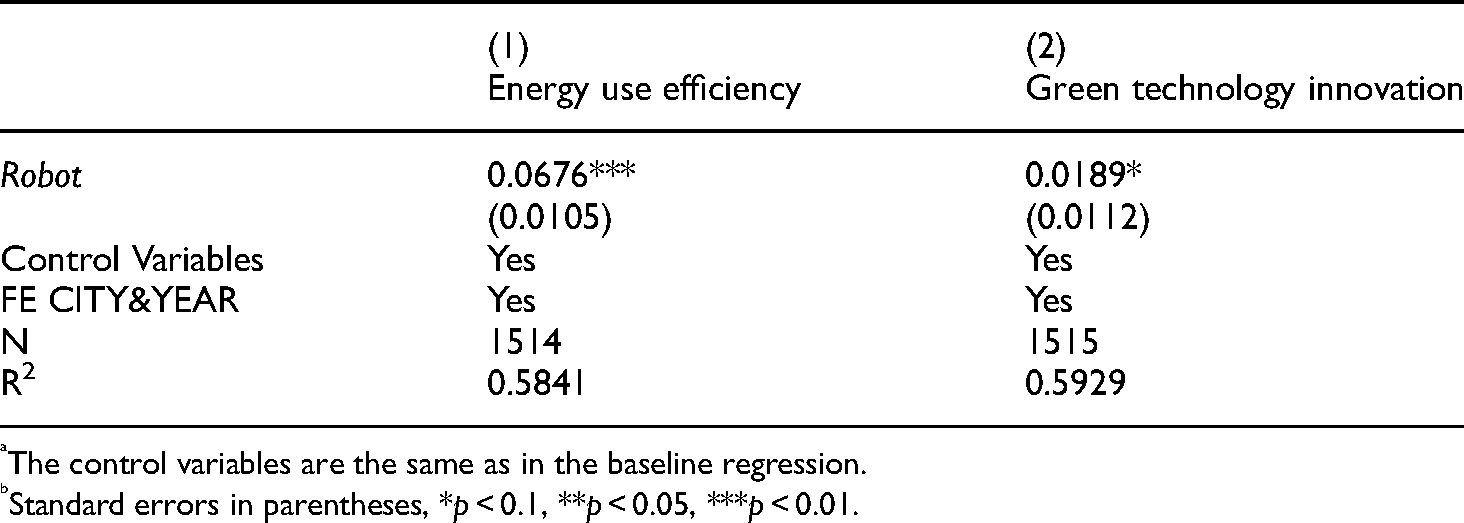
The control variables are the same as in the baseline regression.
Standard errors in parentheses, *p < 0.1, **p < 0.05, ***p < 0.01.
Energy use efficiency
Patterson defined the ratio of useful output to energy input in production as energy efficiency. 52 With reference to this, we used the logarithmic form of the ratio of gross product to electricity consumption to measure the energy use efficiency of cities, that is, Ln(GDP/Electricity), and used this as the dependent variable to test the effect of per capita robot inventory on energy use efficiency, as shown in column (1) of Table 6. An increase in one robot inventory per 1000 people results in a significant increase of 6.76% in energy use efficiency, thus confirming the consistent finding from the existing literature at the city level.30–32 This suggests that the increase in city output from industrial robot applications far outweighs their energy consumption and can improve energy use efficiency, leading to a synergistic effect of reducing air pollution.21,22
Green technology innovation
Although the academic community has not yet reached a consensus on the definition of green technology, it cannot be denied that green technology has the property of promoting green development and building an ecological civilization, and green technology innovation has environmental benefits. 28 With advances in information technology, the utilization, and reliability of patent statistics as proxy indicators of innovation activity have increased. 53 In view of this, we used the logarithmic form of the number of green invention patents filed by cities in the current period to measure the level of green technology innovation in cities and used this as the dependent variable to test the impact of the robot inventory per capita on green technology innovation, as shown in column (2) of Table 6. An increase of one robot inventory per 1000 people will significantly increase the level of green technology innovation by 1.89%, which is consistent with Lee et al.'s finding. 35 This shows that industrial robot is not only a representative technology for automation but also the embodiment of green technology, which can effectively improve the level of green technology innovation and thus systematically reduce air pollutant emissions. 29
Heterogeneity analysis
Theoretically, the impact of robots' intervention in cities' industrial systems on local air pollution levels will vary across cities due to differences in industrial development, natural endowments, and government management. Therefore, a heterogeneity analysis was conducted here for cities with different characteristics to confirm which characteristics are beneficial for the air pollution reduction effect of industrial robots. The estimated results are shown in Table 7.
Heterogeneity analysis.

The control variables are the same as in the baseline regression and have been controlled as well.
Standard errors in parentheses, #p < 0.12, *p < 0.1, **p < 0.05, ***p < 0.01.
Low-carbon pilot
We divided the sample into low-carbon pilot cities and non-low-carbon pilot cities based on whether the cities were included in the low-carbon city pilot list. The subsample estimation results show that industrial robots exhibit significant air pollution reduction effects only in the non-low-carbon pilot cities, which are even more pronounced than in the full sample cities, and it appears as if the low-carbon pilot cities in the full sample offset the pollution reduction effects of industrial robot applications.
Resource endowment type
We divided the sample into resource-based cities and non-resource-based cities based on whether the cities were included in the National Sustainable Development Plan for Resource-based Cities (2013–2020). The subsample estimation results show that industrial robots exhibit a significant air pollution reduction effect only in non-resource-based cities, which appear to be using technology to compensate for their lack of resources.
Environmental regulation intensity
Generally, the multidimensional nature of environmental regulation makes it difficult to quantify, and academics have not yet reached a consensus on measuring the level of environmental regulation. However, as environmental regulation has currently been implemented in China mainly through the issuance of relevant policy documents, local government work reports tend to reflect the willingness, direction, and strength of local environmental governance to a certain extent. Therefore, we referred to Chen et al. to measure the intensity of city environmental regulation in terms of the proportion of relevant environmental vocabulary to the total vocabulary of local government work reports and used a machine learning approach to judge the sample into cities with strong environmental regulations and cities with weak environmental regulations. 54 The subsample estimation results show that industrial robots exhibit a significant and comprehensive air pollution reduction in cities with weak environmental regulations, whereas they only significantly reduce SO2 concentrations in cities with strong environmental regulations.
Discussion
Addressing climate change and combating air pollution are coupled and coordinated
Pollution abatement and carbon reduction are often considered to have co-benefits due to the large overlap between the sources of air pollutants and carbon dioxide.26,55 Our findings validate this view, suggesting that low-carbon pilot policies can achieve synergistic management of climate change and air pollution. Since low-carbon pilot cities improved air quality while exploring carbon reduction pathways, 56 the reduction effect of air pollutant concentrations by industrial robots is not significant. In other words, in non-low-carbon pilot cities, industrial robotics can exert pollution reduction effects comparable to those of low-carbon pilot policies.
Resource-based cities rely on inherent resources, while non-resource-based cities rely on technological advances
Resource-based cities are cities with mining and processing of local natural resources as the leading industry, and as important strategic guarantee bases for energy resources, their sustainable development is crucial for promoting new industrialization and urbanization processes and ecological civilization construction. In 2013, the State Council issued the National Sustainable Development Plan for Resource-based Cities (2013–2020), which planned resource-based cities, including 126 prefecture-level administrative regions (prefecture-level cities, regions, autonomous regions, leagues, etc.).
The heterogeneity analysis shows that the intensity of response to introducing industrial robotics in resource-based cities differs from that in non-resource-based cities under the influence of resource endowment and governmental planned development. Specifically, resource-based cities lack the incentive to pursue technological development because of the relatively low energy use costs associated with abundant natural resources. In contrast, non-resource-based cities rely more on technology due to energy cost pressures, and robots are more deeply integrated into the industrial systems of such cities, thus significantly reducing pollution.
Industrial robot applications can replace environmental regulations for air pollution control
Environmental regulation in China is mainly conducted through the issuance of policy documents to regulate the polluting behavior of enterprises. However, “imperative” environmental regulation may lead to the curtailment of productive investments and innovation expenditures by enterprises, 57 or it may force firms to upgrade their production technology in order to seek development. 58
The findings from the heterogeneity analysis in this paper similarly suggest that the intensity of environmental regulation affects the pollution reduction effect of industrial robotics applications in cities' industrial systems. Specifically, in cities with strong environmental regulation, firms' pollution emission behavior is well controlled, and thus the environmental gain of introducing industrial robotics is not significant. In contrast, in cities with weak environmental regulation, industrial robotics can be used as an alternative tool to environmental policies to effectively reduce air pollutant concentrations and help restore unpolluted skies.
The above discussion reveals an interesting phenomenon: in cities where green policies such as low-carbon pilots, resource planning, and environmental regulation are not or partially covered, the pollution reduction effect of industrial robot applications is undoubtedly evident and even magnified in most cases. Therefore, it is reasonable to assume that cities with imperfect green policies can use technology applications such as industrial robots to achieve air pollution control under the pressure of pollution reduction requirements.
Conclusions and policy implications
China's average air pollution levels are still higher than international safety values; haze remains above cities, and air pollution prevention and control should be continuously promoted. In the process of integration into the city industrial system, industrial robots may be able to bring synergistic benefits in controlling pollution. However, there is a lack of research on the effects of industrial robots on city air pollution levels. This study examines the relationship between the two and argues for the mechanism of action of industrial robots. First, we constructed a per capita robot inventory indicator at the city level in China using the IFR dataset and the National Economic Census China (2008) industrial enterprise panel data, and then analyzed its effects and mechanisms on city air pollutant concentrations. The study finds that, first, industrial robots are a booster army in the Blue Sky Defense War, and industrial robot applications significantly reduce city air pollutant concentrations. The conclusions still hold after controlling for various factors that may affect city pollutant concentrations and a series of robustness tests. Second, industrial robots are the embodiment of green technology, and a mechanism analysis shows that industrial robots can achieve synergistic benefits in reducing cities' air pollution by improving energy use efficiency and promoting green technology innovation. Third, city heterogeneity exists in the pollution reduction effect of industrial robots, and the heterogeneity analysis shows that industrial robots reduce air pollution more prominently in non-low-carbon pilot cities, non-resource-based cities, and cities with weak environmental regulations, suggesting that industrial robots can be used as an alternative to green policies to reduce cities' air pollution.
Based on the Chinese city level, this study examines the importance of industrial robots for controlling air pollution, thereby enriching research related to industrial robots and air pollution. The findings of this study echo the national sustainable development goals of promoting new industrialization and urbanization and establishing an environment-friendly society at the policy level. This study presents several policy implications as follows.
First, policy support is critical. The implementation of extremely effective pollution reduction policies should first be ensured, and then the broader coverage of these policies should be actively and consistently promoted. Comprehensive policy support, coupled with the introduction of industrial robotics, is the two-pronged approach that can help a city's industrial system adapt more quickly to national trends in air pollution prevention and control.
Second, enhancement of the scale of application and the degree of intervention of industrial robots in the city industrial system, strengthening the introduction of fully automated production lines and the operation of closed production workshops to achieve full collection and treatment of pollutants after discharge, and ultimately, reducing the emission of air pollutants and secondary pollution from the source of industrial activities.
Third, encouraging enterprises to target the introduction of industrial robots with different degrees of automation, such as human–robot collaboration robots that are easy to operate and configure to help more enterprises unlock automation applications and make full use of the energy efficiency improvement effect of automated production, while driving the synergistic development of independent R&D and green technology innovation of industrial robots in China.
Finally, optimize the development path of industrial transformation and upgrading by focusing on intelligent technology application and green process transformation, especially in resource-based cities with huge space for technology introduction, cities lacking policy pilots, and cities with weak environmental regulations, and make full use of the high marginal pollution reduction effect of industrial robots in such cities to maximize the pollution reduction value of industrial robot applications.
The primary limitation of this study is that it mainly analyzed the impact of industrial robots on three major haze-causing substances (PM2.5, PM10, and SO2) and did not investigate the impact on other air pollutants (CO, O3, and NOx). Therefore, a more comprehensive examination of the impact of industrial robots on air pollution can be considered in future studies.
Footnotes
Availability of data and material
City-level data on robot inventory for this paper is not publicly available but can be collected from the publicly available industrial robot dataset of the International Federation of Robotics. Besides, raw data for the other variables at the city level are obtained from the China Stock Market and Accounting Research Database (CSMAR), the China Meteorological Data Service Centre, Chinese Research Data Services (CNRDS), and government work reports for each prefecture-level city. All of the above data sources have been explicitly identified in the main text.
Authors’ contribution
Lingzheng Yu: Conceptualization, Writing – review & editing. Chenyu Zeng: Writing – original draft. Xiahai Wei: Methodology, Formal analysis.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The paper is supported by the National Social Science Fund of China (No: 22BJL075).