
Abstract
In order to solve the problem of poor robustness of the traditional method of calculating torque in the mechanical model of 7-DOF picking manipulator, this paper proposes a control strategy of calculating torque plus fuzzy compensation by using adaptive fuzzy logic system to compensate the uncertain part of the mechanical model of 7-DOF picking manipulator. By using Lagrange method, the dynamic model of 7-DOF manipulator is established, and the relationship between joint motion and applied torque (force) is obtained. Using ADAMS and MATLAB to establish a co-simulation platform, the manipulator and trajectory tracking control system are simulated. The results show that the trajectory tracking error of each joint in the algorithm is obviously reduced and the convergence trend is obvious. The average trajectory tracking accuracy of joint 1 to joint 7 was improved by 70.22%, 94.78%, 0.62%, 74.23%, 89.78%, 86.45%, and 67.15%, respectively. In this control scheme, the control force (moment) of each joint changes regularly, and the output force (moment) does not appear chattering and mutation when the disturbance signal is added. The research results can provide support for the further study of picking manipulator trajectory tracking control system.
Introduction
Picking robot has been gradually applied in the field of agricultural engineering, it is mainly used for picking tomatoes, cucumbers, oranges, apples, cherries, and so on.1–6 Picking manipulator is a 7-DOF manipulator composed of two moving joints and five rotating joints,7–10 it is a multivariable system with highly nonlinear, strong coupling, and time-varying pose.
When the external environment complies with constraints, it is difficult to obtain an accurate dynamic model of the manipulator. Therefore, the use of model-based control algorithms will cause problems such as poor robustness of the control system. The current trajectory tracking control methods mainly include calculation torque method, fuzzy control, neural network control, and fuzzy neural network control methods.11–14 The calculated moment method is mainly used when the model is relatively fixed, Fuzzy logic systems have the ability to approximate arbitrary nonlinear functions with arbitrary accuracy. 15 In recent years, adaptive fuzzy control has been increasingly used in manipulator control and has achieved a series of results.16–18 Hsu et al. 19 combined fuzzy control and supervisory control to ensure the stability of the closed-loop system. Labiod 20 use fuzzy logic compensation system to adaptively compensate the inaccurate and external interference manipulator dynamic model, and use the two-degree-of-freedom or five-degree-of-freedom manipulator for simulation verification, the results show that the control strategy has good stability and robustness, and has good trajectory tracking position error convergence.21–24 The above adaptive fuzzy logic system has many membership functions, which leads to many fuzzy rules and large amount of calculation, therefore affects the real-time performance of control, and is usually suitable for manipulator systems with fewer degrees of freedom. Aiming at the uncertainty of the dynamic model parameters of the redundant picking manipulator and external interference.
This paper adopts a control strategy combining calculation torque and fuzzy compensation, established a joint simulation platform through ADAMS and MATLAB. This method doesn’t need to test the acceleration of the manipulator joints, and the uncertain part of each joint is approximated by a separate fuzzy logic system. The total number of fuzzy rules used is small, and it is more suitable for Redundant manipulator system control. The simulation test of the manipulator trajectory tracking control system is carried out, and the results show that the trajectory tracking error of each joint in the algorithm is significantly reduced, the control accuracy is greatly improved. The research results can provide support for the in-depth study of picking manipulator trajectory tracking control system.
Dynamic model and controller design
Dynamic modeling
Using the Lagrange method and considering the additional disturbance, the dynamic model of the picking manipulator is established as 25

In the formula, D(q) is the 7 × 7 dimensional symmetric positive definite inertia matrix of the manipulator;
Taking into account that the manipulator is affected by uncertain factors such as external environmental interference during the work process, the dynamic model is not accurate, and the calculated torque method is used to control the output as:

In the formula, D0, C0, and G0 are the estimated values of D, C, and G; e = [e1, e2, … , e7]T is the error vector; e = q − qd; Kv and Kp are the velocity and position feedback gain vectors; qd is the desired joint position vector.
From equations (1) and (2), we can get

And ΔC = C0 − C, ΔG = G0 − G, it can be seen from equation (3) that the inaccuracy of the dynamic model of the manipulator will cause the system to produce an uncertain part
Calculating torque-fuzzy compensation controller design
Fuzzy logic system based on fuzzy basis function
The fuzzy logic system realizes the conversion of fuzzy language rules into precise mathematical formulas. Assume that the fuzzy system is a mapping from the input domain U∈Rn to the output domain V∈Rn, and the form of fuzzy rules is:
R
(l): If x1 is
Among them, x = [x1, x2, … , xn]T∈ U, y = [y1, y2, … , yl]T∈ V are the input and output variables of the fuzzy system, respectively,
If single value fuzzer, product inference engine and center average anti-fuzzer are used to design fuzzy logic system, the output of fuzzy logic system is

Among them,

The universal approximation theorem provides a theoretical basis for fuzzy systems to be used in all nonlinear modeling problems.
Controller design
Design an adaptive fuzzy logic system f to approximate the uncertain part


Among them,

In the formula, τ1 is the calculated torque controller; τ2 is the adaptive fuzzy compensation controller. According to formula (4), it is defined as

Among them,

Among them,

Define the Lyapunov function as

Among them, γ > 0, and

Among them, Q ≥ 0, take the adaptive law as

The stability analysis is as follows:
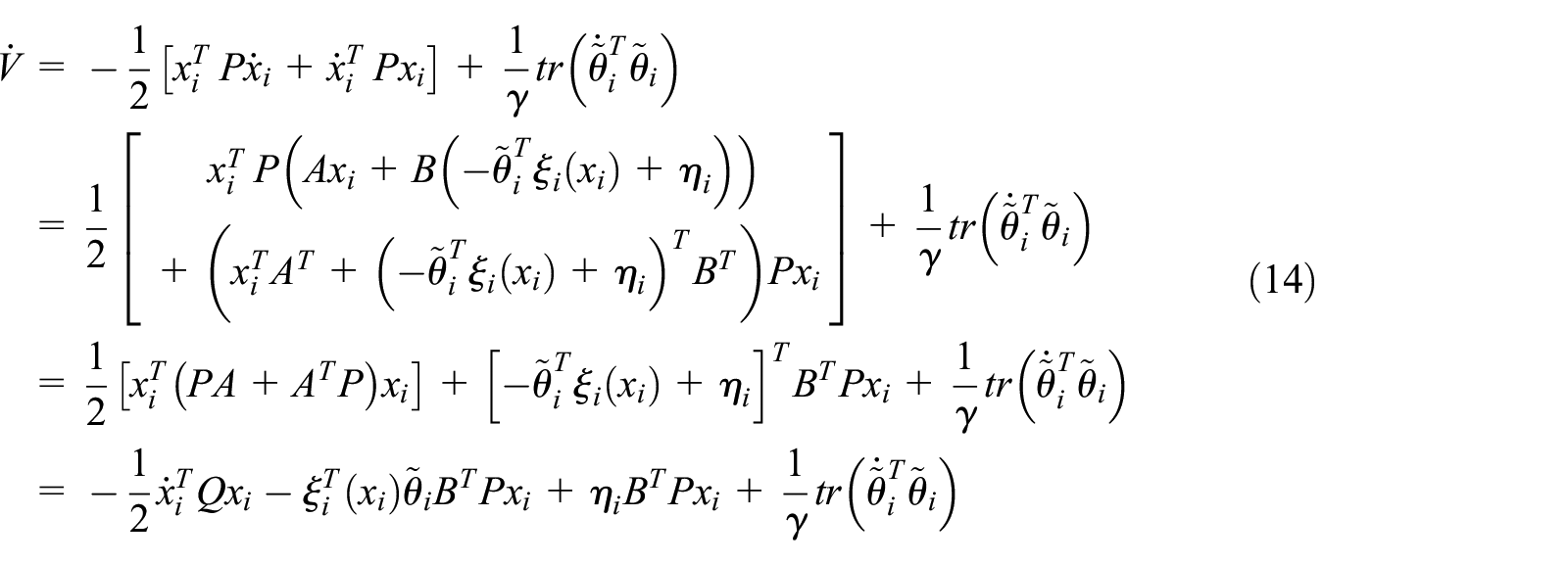
Due to the existence of equation (15):

Then

Since

When

Control principle of compute torque with fuzzy Compensation.
Simulation and analysis of trajectory tracking control
Virtual prototype of picking manipulator
The structure diagram of picking manipulator is shown in Figure 2, the structural parameters are shown in Table 1.
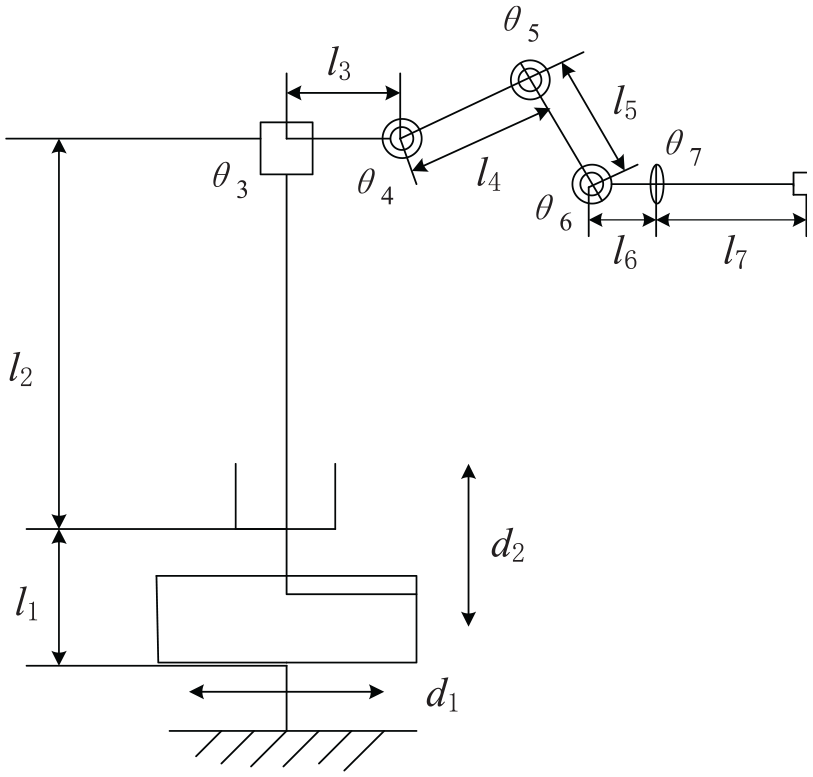
Structure diagram of picking manipulator.
Structure parameters of manipulator.

In order to realize the effective combination of mechanical system analysis and control design simulation, the electromechanical joint simulation of Adams and MATLAB is adopted to form a closed data cycle between Adams and MATLAB. The joint simulation system platform is shown in Figure 3.

Co-simulation control system via ADAMS and MATLAB.
Dof 7_input is the system function name of joint variable input, Dof 7_control is the system function name of control module. Adams sub is virtual prototype module imported from ADAMS to Matlab. J1, J2, J3, J4, J5, J6, and J7 are the trajectory tracking error scopes of the seven joints. T1, T2, T3, T4, T5, T6, T7 and E1, E2, E3, E4, E5, E6, E7 are the velocity (angular velocity) and displacement (angle) scope of the seven joints. S-Function1 and S-Function2 represent two system functions for Simulink module in MATLAB.
Co-simulation based on ADAMS and MATLAB
ADAMS is an excellent virtual prototype simulation software, which can easily build a simulation platform with MATLAB. The data cycle between ADAMS and MATLAB can be formed by co-simulation, as shown in Figure 4.
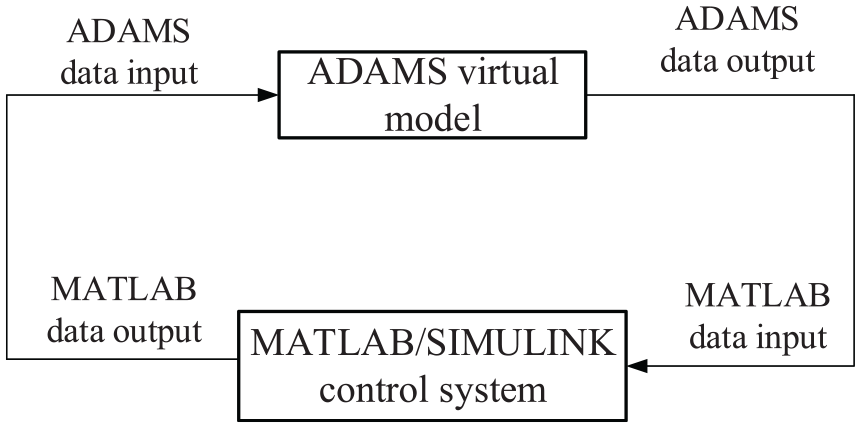
The data cycle diagram between ADAMS and MATLAB.
The co-simulation can be divided into the following steps:
In ADAMS, the input and output of the virtual prototype model of the 7-DOF manipulator are treated as the state variables of the system, and the input variables are associated with the single component force (torque) of each joint.
The ADAMS/controls module is loaded, and the input (output) signals of the virtual prototype of the manipulator are defined. The control software type is set to Matlab, and the analysis type is set to Fortran;
The interface information is imported into the workspace of MATLAB, and the Adams_sub module of manipulator virtual prototype is established;
Taking the Adams_sub module as the controlled object, the trajectory tracking control system is established in Simulink, so as to complete the connection between the Adams_sub module and other modules.
Simulation results and analysis
In order to verify the manipulator trajectory tracking effect of the adaptive fuzzy compensation control, it is compared with the traditional calculation torque method control. In the two algorithms, set the desired manipulator joint space trajectory, joint initial position, and initial velocity as:



In order to achieve universal approximation, this paper defines the membership functions of joint deviation and deviation rate as Gaussian membership functions. The membership function

Membership function

Among them, l is the number of fuzzy rules l = [12, 3, 4, 5], j = 1, 2, … , 5. Assuming that the physical parameters of the manipulator are uncertain, set the mass and moment of inertia of each member of the manipulator as estimated values, and the disturbance signal is introduced as

In order to avoid unreasonable torque output of joint drive motor caused by unsatisfactory control parameters, engineering tuning method is adopted and step disturbance is added to the system. Based on Ziegler Nichols method, the parameters of PID controller for each joint of manipulator are adjusted. First, let the differential coefficient and integral coefficient Kd = Kt = 0, increase the proportional coefficient Kp until the system starts to vibrate, then multiply the Kp value by 0.6 to get the final Kp value. Add step disturbance to the system, change the parameters of the regulator, observe the step response curve of the regulator output, and repeat the test until the control quality is satisfactory, the control parameters are determined as follows: Feedback gain Kp = 93eye(7), and Kv = 64eye(7), γ = 1000, Q = 100eye(2). In the experiment, set the trajectory of manipulator end as straight line, arc, and curve. Due to the similar test results, this paper only analyzes the results of the manipulator end moving from the initial position [0, 0.455, 0.931] to the end position [0, 0.305, 0.781]. Figure 5 shows the output tracking errors of each manipulator joints in two algorithms, and Figure 6 shows the output control force (torque) of each manipulator joints in two algorithms.

The output tracking errors of each manipulator joints in two algorithms: (a) Joint 1, (b) Joint 2, (c) Joint 3, (d) Joint 4, (e) Joint 5, (f) Joint 6, and (g) Joint 7.

The Output control force (torque) of each manipulator joints in two algorithms: (a) Joint 1, (b) Joint 2, (c) Joint 3, (d) Joint 4, (e) Joint 5, (f) Joint 6, and (g) Joint 7.
It can be seen from Figure 5 that the average tracking errors of joints 1–7 by using the calculation torque algorithm are 2.238 × 10−3 m, 0.0242 m, 0.0132, 0.0526, 0.113, 0.1075, and 0.0388 rad respectively, and the average error of seven joints using the calculation torque fuzzy compensation control algorithm is 6.65 × 10−4 m, 1.278 × 10−3 m, 0.0131, 0.0135, 0.0116, 0.0146, and 0.0127 rad. The average trajectory tracking accuracy was improved by 70.22%, 94.78%, 0.62%, 74.23%, 89.78%, 86.45%, and 67.15%, respectively. The maximum tracking error of mobile joint 2 and revolving joint 5 reached 0.026 m and 0.1507 rad, respectively. However, after introducing fuzzy compensation control algorithm at the same time point, the maximum error of joint 2 and joint 5 is only 0.00012 m and 0.006 rad, respectively. In the calculation torque method, except for the moving joints 1 and 2, the trajectory tracking errors of the other five joints have great changes, and the control stability is poor. In the application of calculation torque adaptive fuzzy compensation method, all joints achieve the desired motion trajectory within 2–3 s, and the tracking error of each joint changes smoothly, which can eliminate the influence of mechanical model inaccuracy and disturbance, and the expected trajectory of each link of picking manipulator is effectively controlled.
It can be seen from Figure 6 that the fuzzy compensation torque changes smoothly without sudden change. When the initial position error is large, the initial output force (torque) of joint 1 to joint 7 is 258.63, 453.127 N, 54.39, 98.33, 19.45, 12.73, and 0.11 N·m respectively. The Starting force (torque) of moving joints 1 and 2 and rotating joints 3 and 4 is relatively large, this is mainly due to the fact that the four joints are located at the end of the frame and bear a large body weight and inertial force. The closer the joint to the end effector, the smaller the output torque, which provides data support for the selection of drive motors for each joint. During the entire control process, the force (torque) changes regularly without abnormal chattering, which ensures the stability of the system.
Conclusion
For the 7-DOF picking manipulator, a calculation torque fuzzy compensation controller is designed. Its implementation does not depend on the precise mathematical model of the controlled object. The parameters of the fuzzy logic system can be adjusted adaptively, it has strong robustness to external disturbance signals. This control algorithm is used for the trajectory tracking control of the picking manipulator. Compared with the calculation torque control algorithm, the tracking error is significantly reduced, the control accuracy can be increased by 94.72%, and all joints reach the desired motion transition within 2–3 s and the motion is stable.
In the control algorithm based on adaptive fuzzy compensation, the control output torque of each joint changes smoothly, and the total control force (torque) of each joint of the manipulator changes regularly without abnormal chattering. The closer the hand is to the joint, the smaller the control torque.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.