
Abstract
This paper investigates the attitude tracking control of USVs under conditions of input saturation, external environmental disturbances, and liquid sloshing in fuel tanks. Firstly, the USV is coupled with the moving pulsing ball model (MPBM), and the coupled model is used to address the aforementioned three issues. For external environmental disturbances, a nonlinear disturbance observer is employed to estimate the disturbance values; The forces and torques generated by liquid sloshing are estimated using an radial basis function neural network (RBFNN); The input saturation problem is resolved by using a first-order filter to generate the controller. Finally, the coupled USV-MPBM system is theoretically and practically verified using Lyapunov theory and simulation data. The results show that the system can achieve good attitude control under the proposed controller, and the liquid sloshing is also effectively suppressed.
Introduction
During the transportation of liquid materials, there will inevitably be a phenomenon of sloshing. This is reasonable whether explained from the physical properties of the liquid, such as density and viscosity, or analyzed from the shape, size, and internal structure of the storage tank. Once there is a large-scale and uncontrollable sloshing phenomenon, it will produce undesirable results, including transportation safety and the stability of the system. Therefore, it is necessary to study how to mitigate and suppress sloshing during the transportation of liquids.
In response to the issue of liquid sloshing in storage tanks, researchers have conducted extensive studies and tests, among which the MPBM method is widely applied.1–3 MPBM is an equivalent model that can regard the liquid in any shaped storage tank as a ball with constant mass and variable radius, thereby accurately describing the phenomenon of liquid sloshing during the operation of USVs. 4 Up to now, MPBM has been widely used in spacecraft and has been effectively verified in the application of spacecraft, contributing to the research of spacecraft.4–6
During common liquid transportation processes, USVs inevitably face various impacts, including the sloshing of liquids within storage pipes.7,8 Therefore, the sloshing of liquids cannot be overlooked during the operation of USVs. The common impacts include the following aspects: During the sloshing process, a large amount of impact loads are generated. Not only will the motion attitude of the USV change, but the impact force of the load can also damage the structure of the storage tank9,10; Additionally, if the USV interacts with the sloshing liquid in the storage compartment during operation, it will generate uncontrollable torques, which can greatly affect the stability of the USV system and potentially cause the vessel to capsize and become submerged. 11
During the navigation of the USV, another important aspect is the saturation of the controller. Input saturation has a very significant impact on the performance of USVs, and system stability may be compromised as a result. There are various controllers designed for systems with input saturation, and some common ones currently include: designing a compensation mechanism based on internal auxiliary support that relies on anti-saturation control technology 12 ; designing an event-triggering mechanism that uses a smooth hyperbolic tangent function to approximate the saturation function13–15; using self-organizing neural networks to reduce the impact of input saturation,16–18 etc. After taking certain measures against input saturation, the robustness of the system is improved, 19 the amplitude of the control input is reduced, the control rate is optimized, 20 the computational complexity is decreased, and both the flexibility and stability of the system are enhanced. 21
In recent years, there has been a significant amount of research on fuzzy adaptive fault-tolerant control, such as in references.22–25 These four articles collectively focus on the fuzzy adaptive fault-tolerant control of MIMO nonlinear systems, aiming to address issues such as actuator and sensor faults, external disturbances, and uncertainties in system dynamics. They all employ adaptive control strategies based on fuzzy logic to enhance the robustness of the systems and verify the effectiveness and stability of the proposed control methods through theoretical analysis and simulation experiments. Different approaches were also used to solve actuator problems, all of which are worth emulating in this article.
So far, most of the research articles on liquid sloshing have focused on spacecraft, with few addressing how to consider suppressing sloshing during the operation of unmanned surface vehicles (USVs). Therefore, this article, drawing on the methods of suppressing sloshing in spacecraft, studies the trajectory tracking control problem of USVs in the presence of liquid sloshing, input saturation, and external disturbances. For a USV system that has both input saturation and liquid sloshing, which needs to consider both aspects simultaneously. The designed controllers and control methods must be comprehensive, effectively addressing the issue of input saturation to prevent the USV control system from exceeding maximum value limits, and also suppressing the sloshing liquid in the storage tank to meet the challenges brought by liquid sloshing, ensuring the entire USV system can operate stably. Considering that the operating environment of USVs is also the ocean, and encountering liquid sloshing inside the cabin during operation is inevitable, it is theoretically feasible to apply MPBM to simulate the liquid sloshing of USVs. Combining USVs with MPBM can help readers better understand and predict the changes in the posture and structure of USVs under liquid sloshing, which is very important for the stability analysis of USVs.
Contribution
In this paper, the attitude control problem of a USV that is simultaneously confronted with input saturation and liquid sloshing is investigated. Initially, the MPBM was employed to equivalently substitute the USV’s liquid storage compartment, resulting in a coupled model of the USV and MPBM. For this coupled model, the designed controller that not only achieved the USV’s attitude control but also effectively mitigated the sloshing within the storage compartment. The main innovative aspects of this paper are as follows:
This study comprehensively investigates the trajectory control problem of USVs, specifically addressing the issue of USV trajectory control in the presence of both liquid sloshing and input saturation. This not only provides a new theoretical foundation for the stability control of USVs but also paves the way for future research and applications.
In this study, the coupling of the USV with the MPBM is employed. By establishing a coupling model between the two, the trajectory control problem of the USV is effectively resolved. This approach not only deepens our understanding of how to deal with the suppression of liquid sloshing but also significantly enhances the applicability and effectiveness of the solution.
This paper systematically investigates the trajectory control problem of USVs under key factors such as external environmental disturbances, liquid sloshing, and input saturation. The simulation results verify the effectiveness of the proposed control method, which can provide theoretical support and practical basis for the stable operation of USVs in complex marine environments to a certain extent.
Preliminary knowledge
Notes
∥·∥ represents the 2-norm; |·| represents the absolute value;
Assumptions
Lemmas

where
Kinematics and dynamics equations of USV
The dynamic equations of the USV coupled with the MPBM
As shown in Figure 1, the USV is coupled with the MPBM, resulting in the following models:

where



where
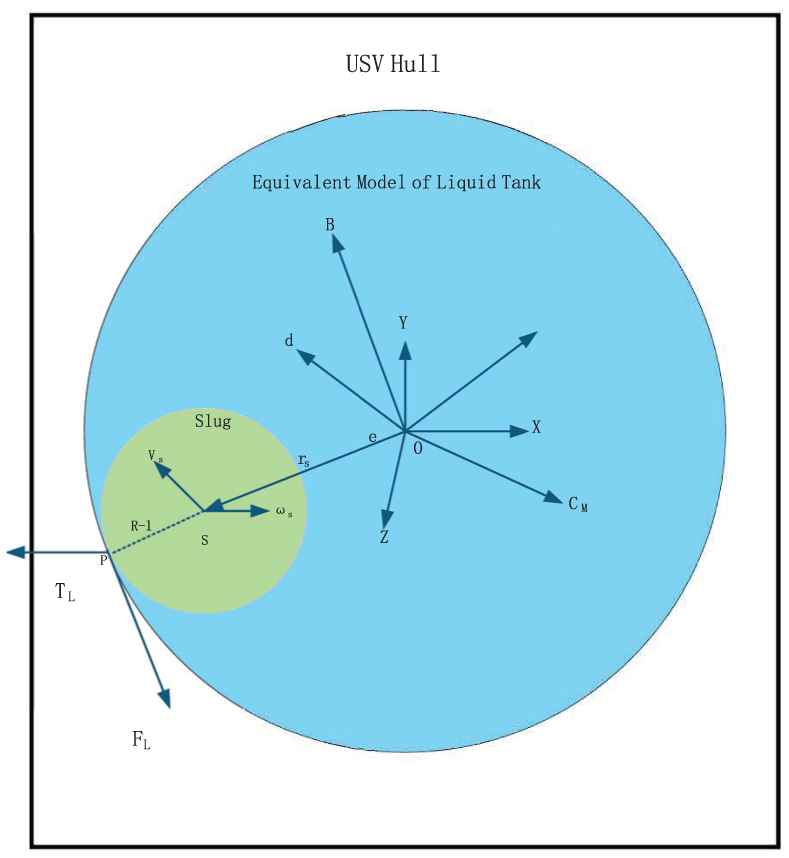
Schematic diagram of MPBM coupled with USV.
However, in practical applications, since
The kinematic equations of the USV represented by quaternions
To facilitate the design of the controller, the kinematic equation of the USV is represented using the following quaternions:

where
Define the attitude tracking target equation as follows:
where
Then, based on equations (6) and (7), the following error equation can be defined:
where

The design of the controller
In order to address the issue of liquid sloshing suppression, the following virtual angular velocity is defined:
where in this context,
Let

Introduce the following auxiliary system for the aforementioned system:

where
The first Lyapunov function is defined as follows:
Differentiate
where
Here, the ideal angular velocity is designed as:

Therefore, from equations (9), (12), and (13), the following can be obtained:

It is observed that if
For

where

Here,

where
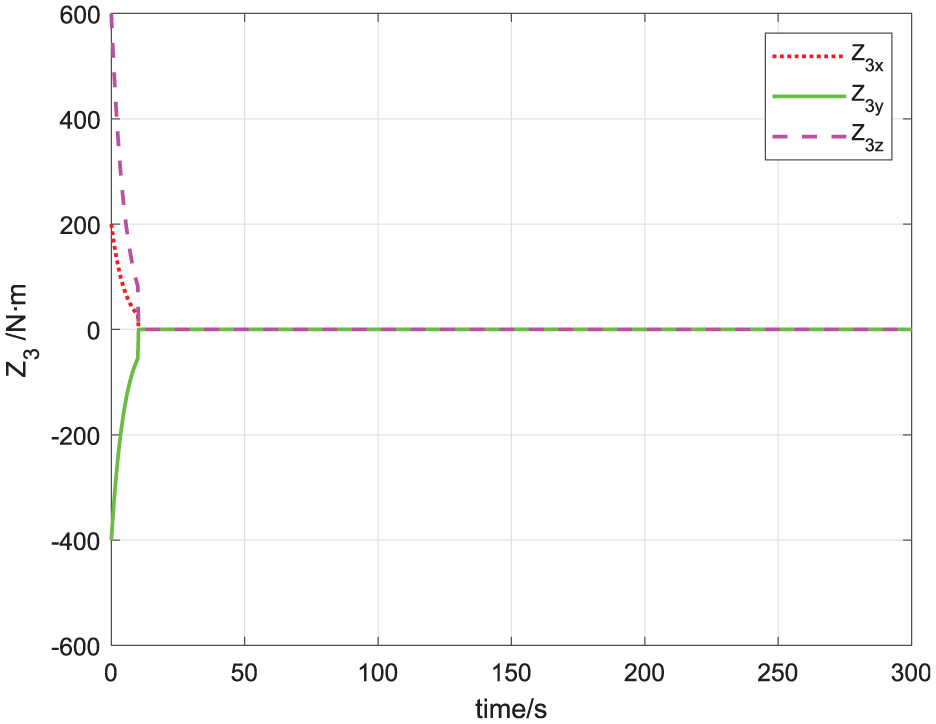
For the external environmental disturbance

where
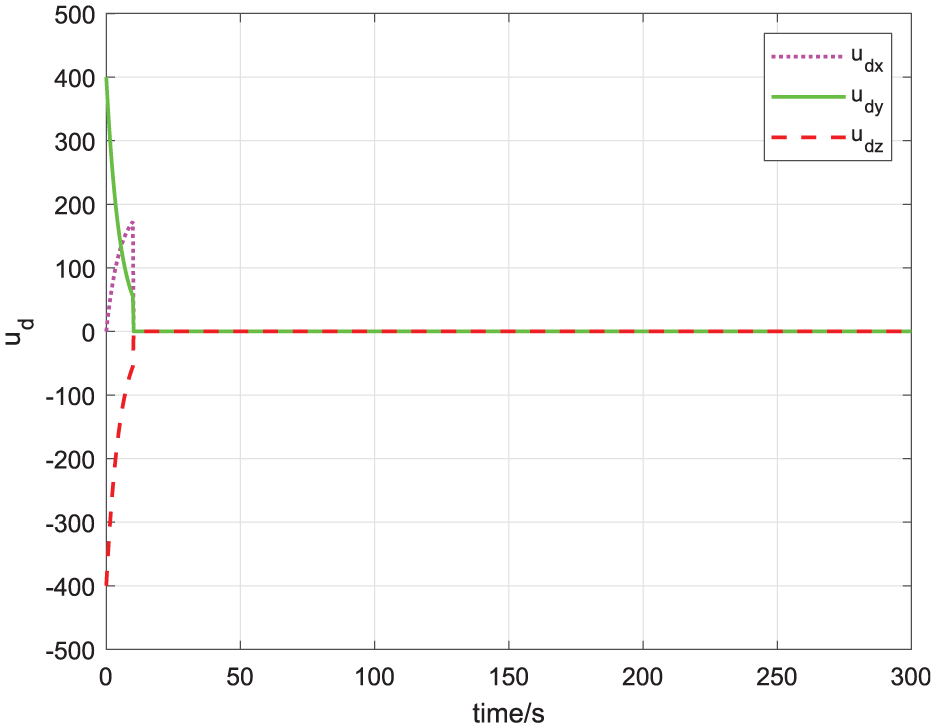
Based on the expressions of equations (17) and (19), the ideal control input can be designed:
At this point, based on the design mentioned above, it can be obtained that:
where
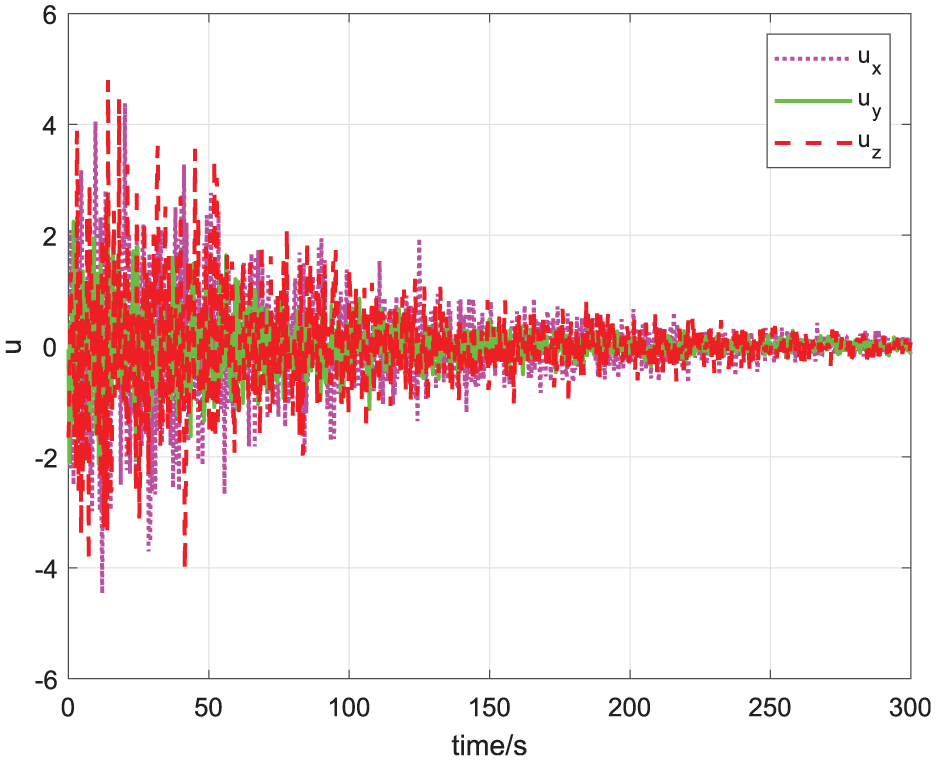
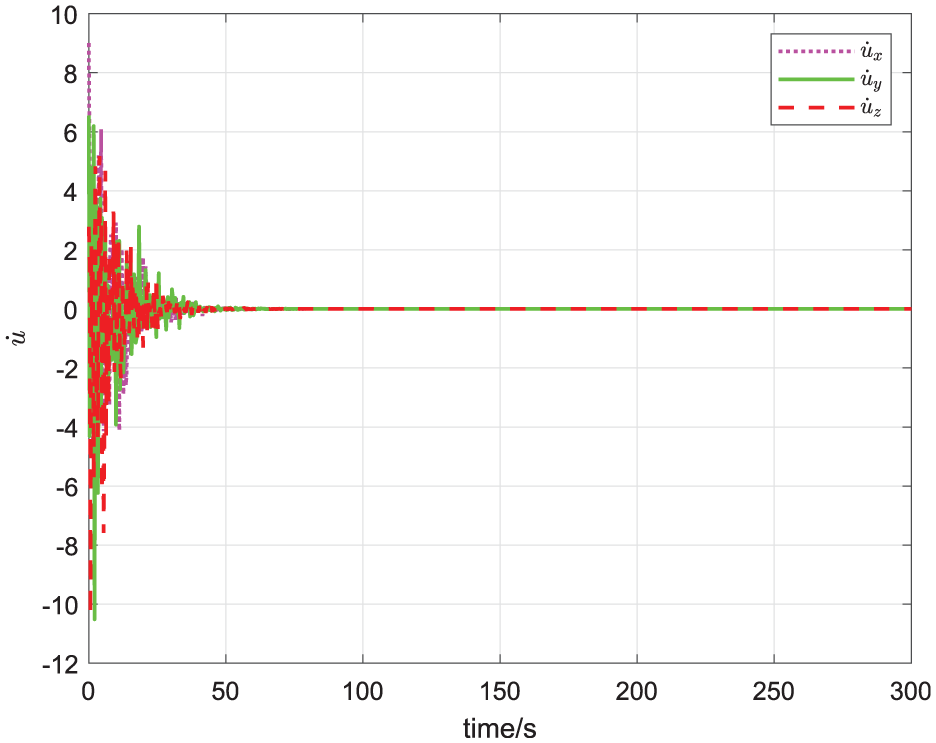
To obtain the actual control input, the following first-order filter is proposed:

where

According to the designed first-order filter
The differential equation (22) is solved to obtain:

The observation is made on
Thus, it can be constrained.
The virtual control input is introduced above; Below, the design proceeds as follows. Based on the expression for
where
Let

Then we can obtain:

Introduce a new filter:

where, the parameter
Let
If


where

Stability analysis
(a) The variables
(b)
(c) For any
(d) When
Opt for the secondary stability function as follows:

then, it can be obtained:
According to assumptions and lemmas, it follows that:
So it can be obtained:

where
Next, multiplying both sides of equation (36) by

So, based on the result from equation (37), it can be concluded that as
(b) Secondly, the parameters
Select the second Lyapunov function as:
Similar to the proof of
By analysis, it can be obtained:

From equation (37), it follows that :

where
From equations (40) and (41), it ultimately follows that:

where
Then, multiplying both sides of equation (42) by

So, based on the result from equation (43), it can be concluded that as
(c) Besides, it will be proved that for any
The range of

thus,

where
Therefore, it can be concluded that when
(d) Finally, it will be proved that when
If the result obtained from equation (43) is less than or equal to

By solving equation (46) and taking the limit as

Therefore, when
When

Therefore, when
Simulation verification
First, the parameters for the liquid-filled USV as follows:
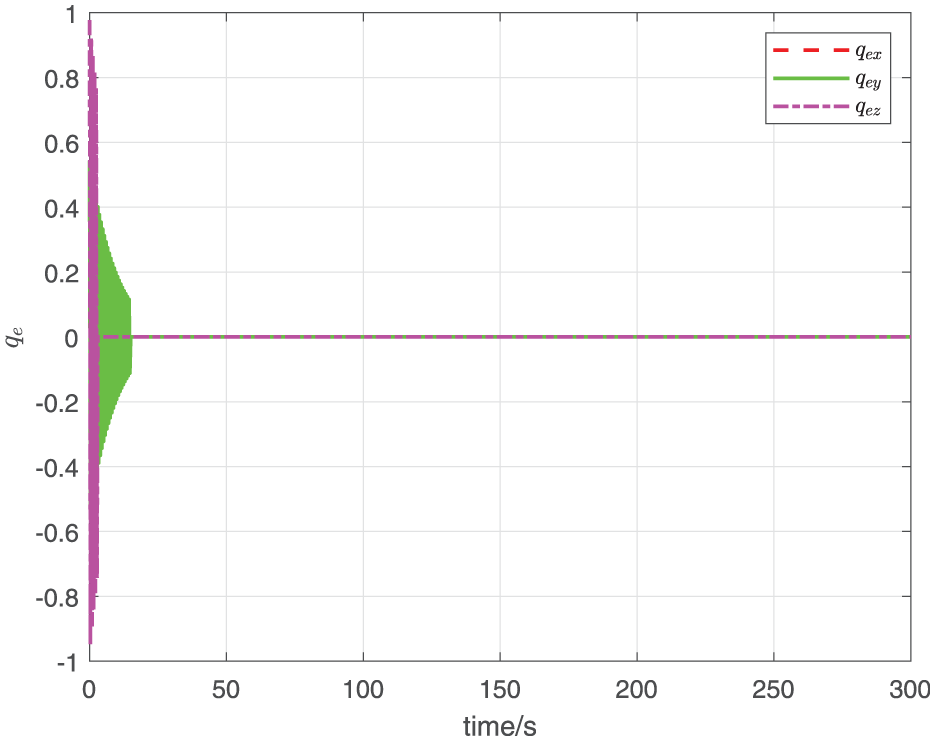
Figures 2 and 3 are images depicting the attitude tracking error
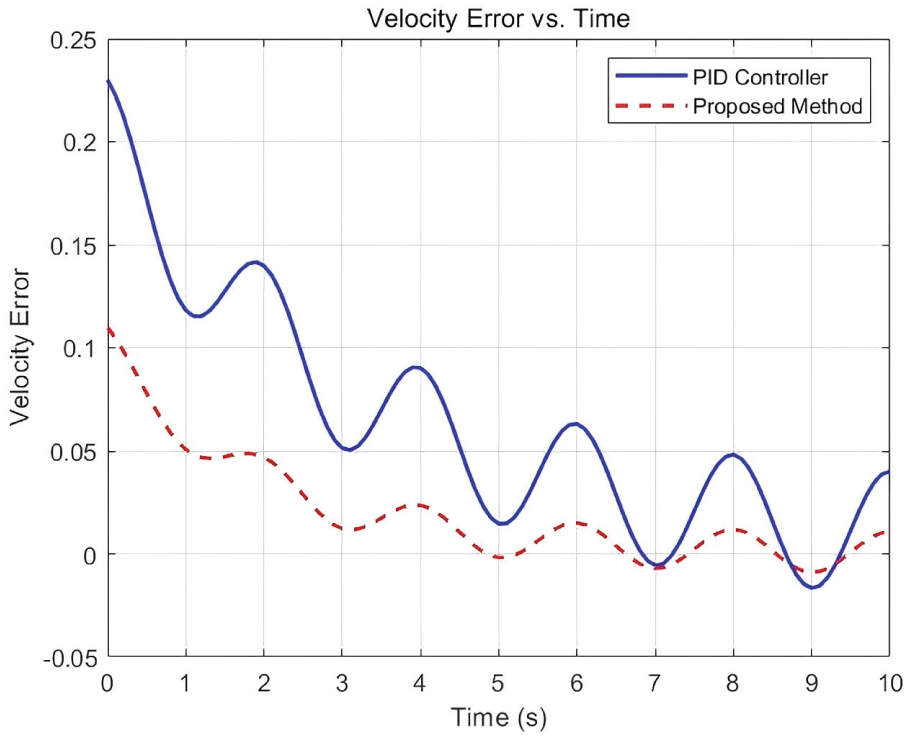
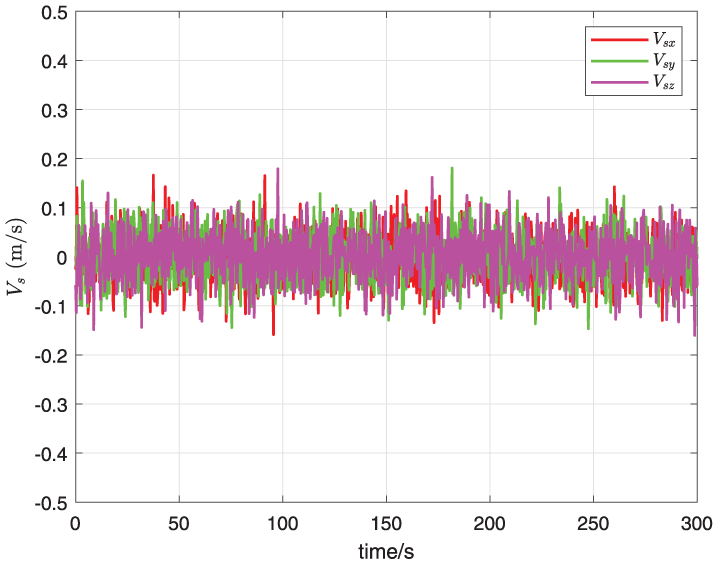
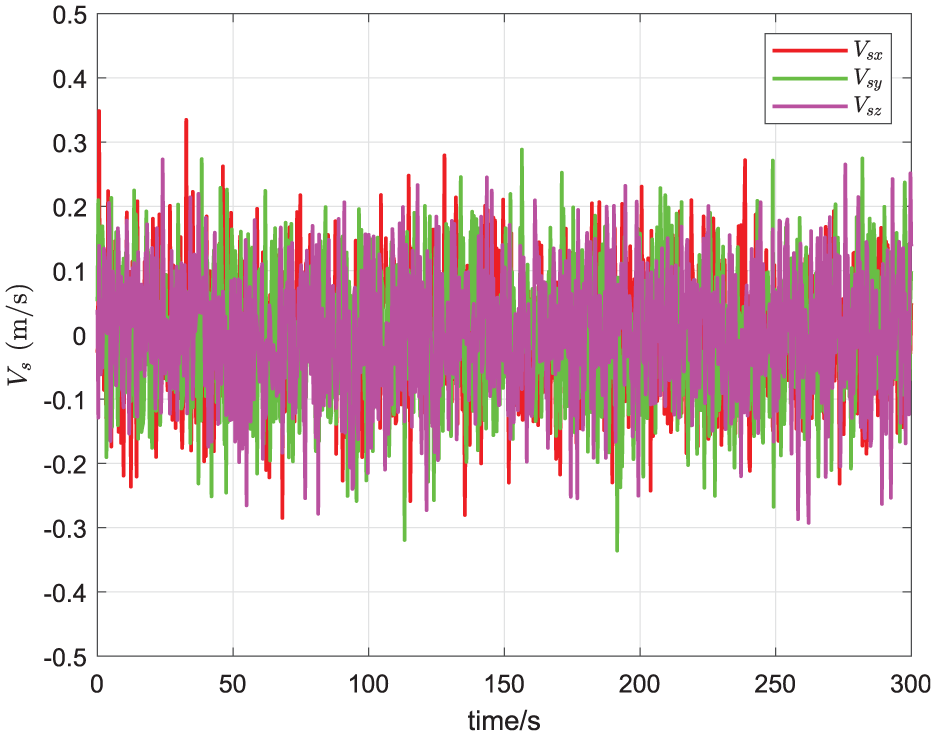
The law of change of velocity error
The law of change of velocity error
The law of change of
The law of change of
The law of change of
The law of change of
The law of change of
The law of change of
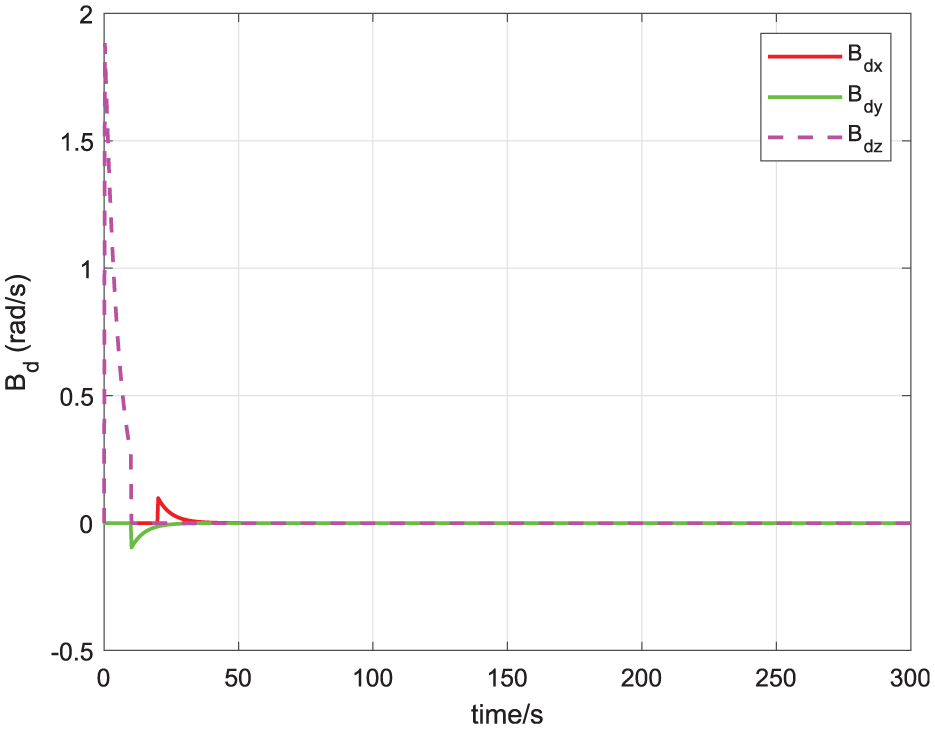
The law of change of
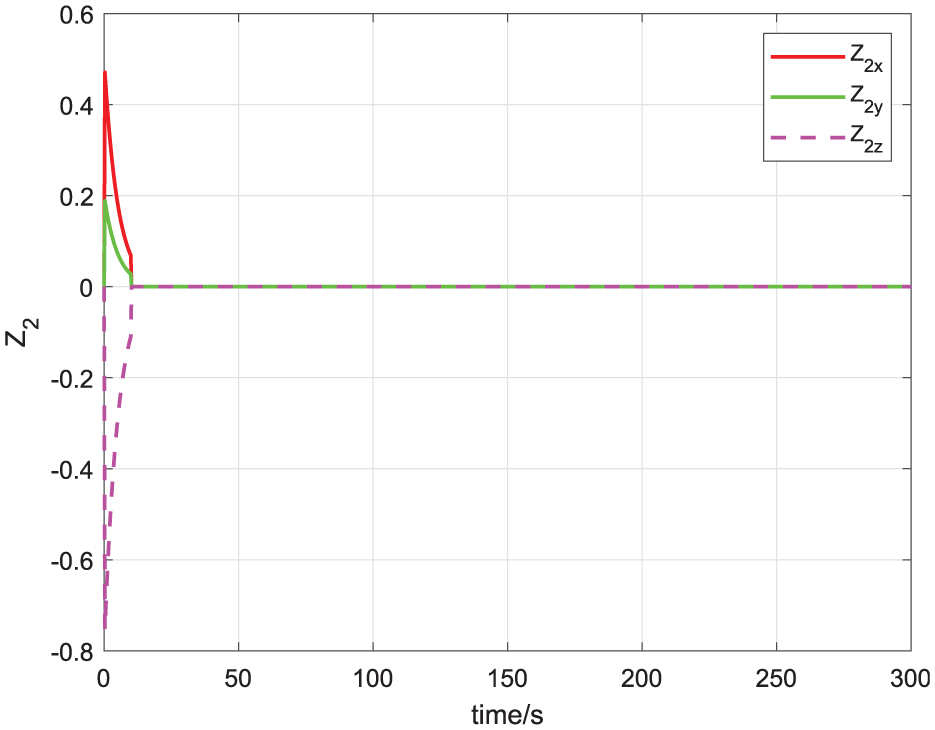
The law of change of
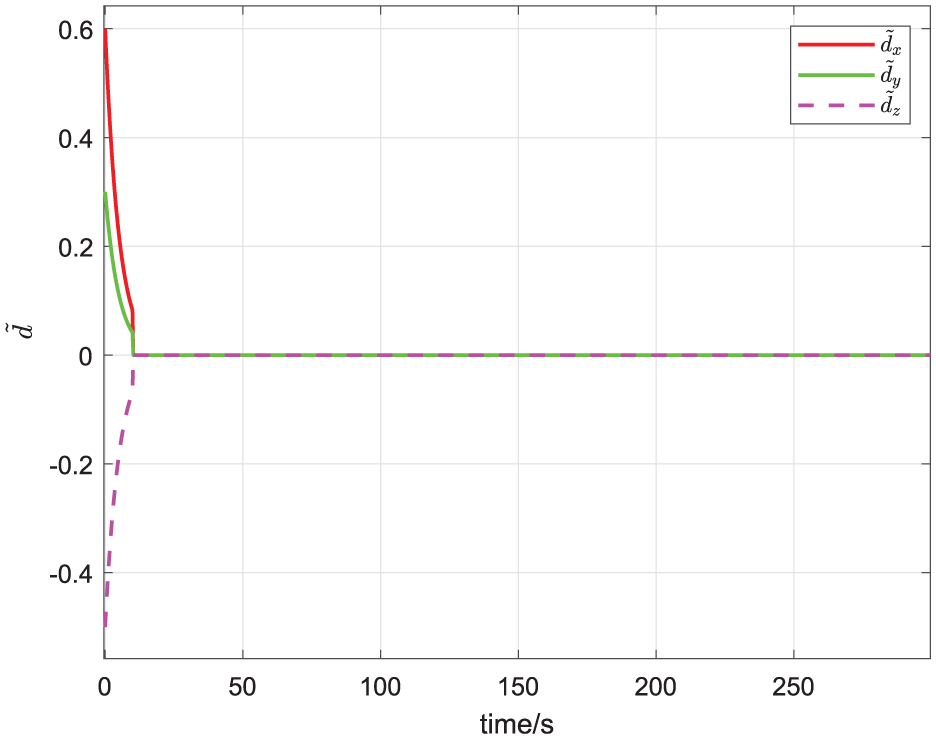
The law of change of
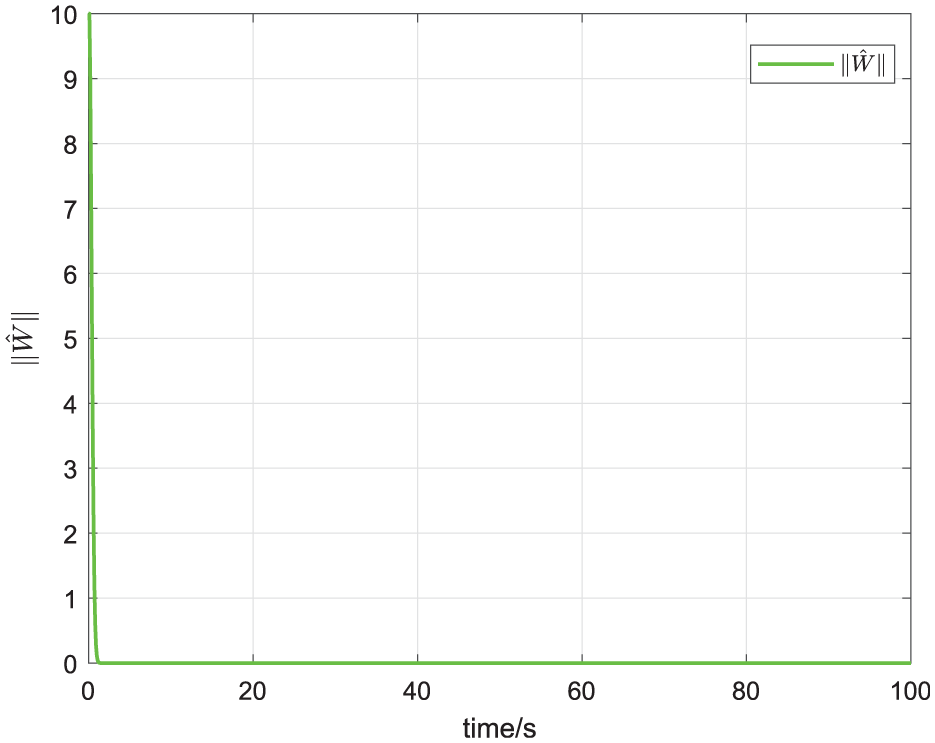
The law of change of
The law of change of
The law of change of
The law of change of
The law of change of
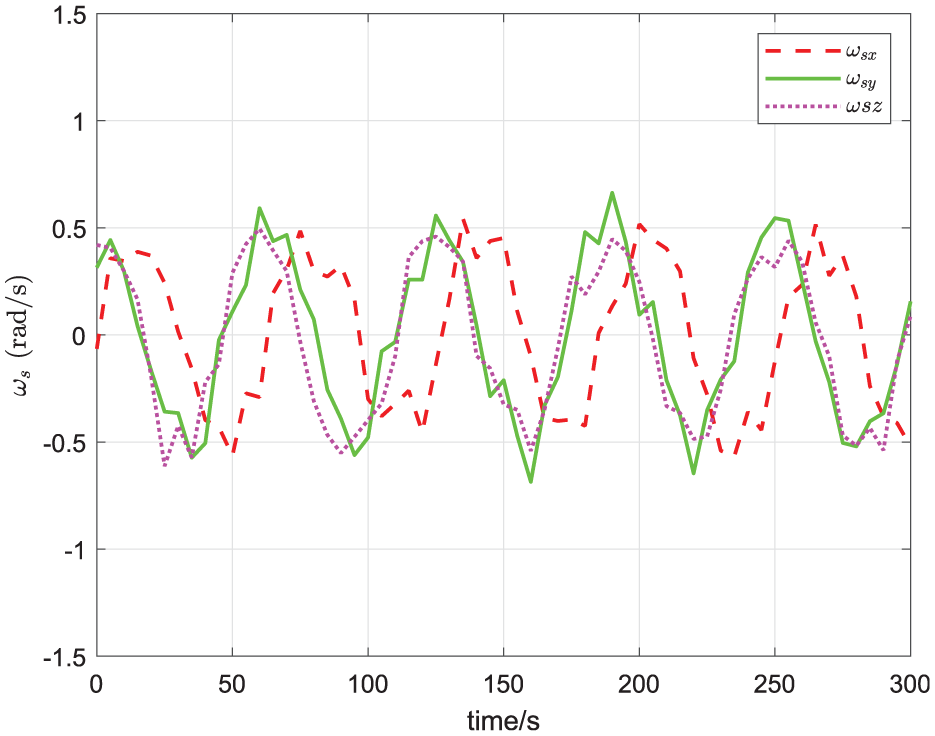
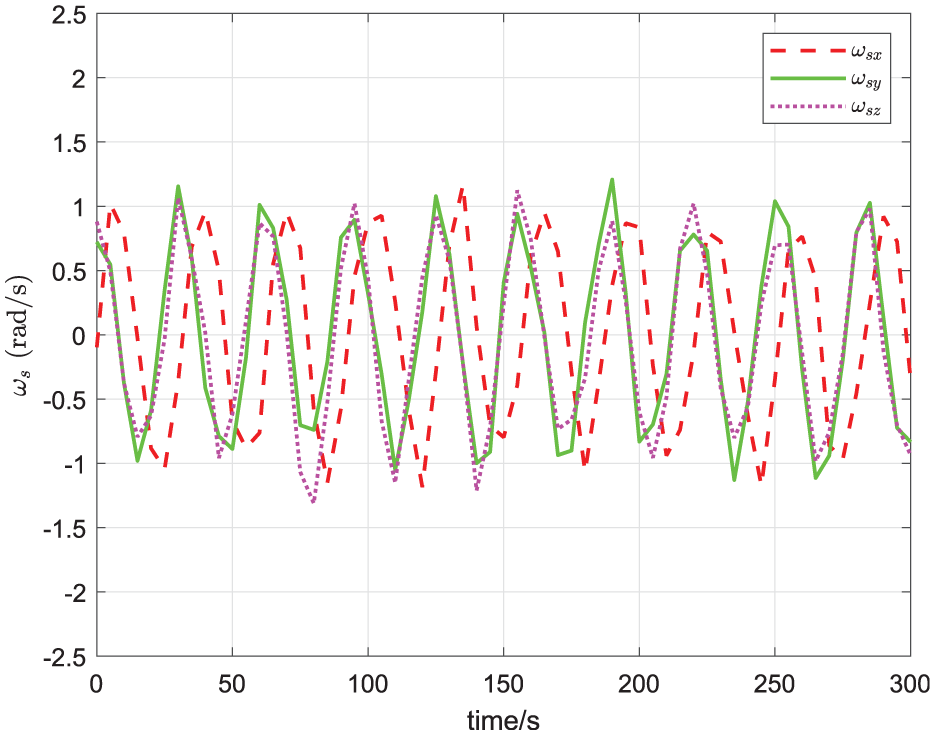
Figure 10 is the simulation image of the ideal angular velocity. When comparing Figure 10 with Figure 4, it is evident that the custom-designed filter is capable of confining the actual angular velocity to a specific range. In Figure 11, a simulation of the internal state error variables, and it can be seen that the error
Conclusion
This paper investigates the attitude control problem of USVs under conditions of external disturbances, input saturation, and liquid sloshing in fuel tanks. It also addresses the suppression of forces and torques generated by liquid sloshing, and finally verifies the results under Lyapunov theory. We found that the coupled model significantly improves the attitude control accuracy of USVs in complex environments; the nonlinear disturbance observer can accurately estimate external disturbances, enhancing the system’s robustness; the RBFNN effectively suppresses liquid sloshing; and the first-order filter successfully resolves the input saturation problem, improving the system’s anti-saturation capability. We are also aware that there will be many challenges in practical applications. We plan to delve into these challenges and propose corresponding solutions. Specifically, we will consider the following aspects in our subsequent research: computational demands, sensor noise, hardware limitations. In the future, we briefly outlined the potential directions for future research, which aims to reinforce the contributions of the current study and lay the foundation for its subsequent development. The future research directions include: more complex liquid sloshing models; robust control strategies under multiple disturbances; integration with other control issues. These directions will deepen the understanding of the liquid sloshing control problem in USVs and provide valuable references for follow-up research. Another, investigating the recovery capability under potential failure scenarios will be an extension of our future work. This includes developing a fault detection and diagnosis system that can monitor the status of sensors and actuators in real time and promptly issue alerts when failures occur; and researching and designing fault-tolerant control strategies to ensure the system can still operate stably and complete tasks in the event of sensor degradation or actuator failure. Explicitly stated is that future research will consider testing on actual USV hardware. Cooperation with laboratories that have USV hardware will be sought, or relevant hardware resources will be applied for if possible. The algorithm will be further optimized in future research to ensure its real-time performance and reliability on actual hardware.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for their constructive comments.
Ethical considerations
This study is basic research related to the field of control. The research process does not involve human participants, experimental animals, or biological samples, nor does it use any private data, proprietary data, or unpublished materials protected by copyright. The research content and experimental protocol strictly adhere to academic ethical standards and relevant publication guidelines, and there are no ethical controversies.
Consent to participate
This study is basic research in the field of control and has obtained informed consent from the team members involved. The entire study was conducted in accordance with academic ethical standards and relevant publication guidelines.
Consent for publication
All members of the research team and relevant participants were fully informed and agreed to participate in this study. The research process strictly adhered to academic ethical standards, with no instances of improper participation.
Author contributions
All authors of this study have substantially participated in the design, implementation, data analysis, or writing of the paper. All authors have read and approved the final version of the paper and bear corresponding responsibility for the research findings.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
All data used in this study were independently collected by the authors. The data processing and analysis were carried out in strict accordance with relevant academic standards, and all raw data and analytical methods can be obtained from the corresponding author upon reasonable request.