
Abstract
This article provides a nonlinear controller for waveriders with input saturation to improve transient performances. First, the exact linearization is applied to change an affine nonlinear model to a linear time-invariant model for waveriders. Then, the linear and nonlinear feedback control law is applied for the obtained linearized model for waveriders, and system stability of the presented control law is proved accordingly. Furthermore, the system robustness and improving transient performances are discussed for waveriders. Finally, an example is given for a longitudinal model of the waverider, and the results demonstrate that the closed-loop systems can track the anticipated commands, while guaranteeing the expected integrated performances for waveriders.
Introduction
The control design in the nonlinear system for waveriders provides a very challenging work associated with the integrated performance, including input saturation, strong coupling, and considerable uncertainty. 1 The nonlinear inversion is a useful tool in the flight control design depending on converting an affine nonlinear system into a linear time-invariant system for waveriders. 2 Accordingly, some linear time-invariant system control methods are feasible for the nonlinear model of waveriders by combining the state feedback control with the selected linear control law. As such, the nonlinear inversion becomes one of the fruitful methods in the flight control design of waveriders. 3
There were many research studies done on the nonlinear inversion adopting the feedback linearization method to enhance decoupling control capacity and system robustness for waveriders. In particular, a reference command tracking controller was proposed in the study of Gao and Wang 4 for an air-breathing waverider with parametric uncertainties, and the feedback linearization method based on the H-infinity method was used to address input constraints and to achieve desired tracking performance. Alternatively, a robust control problem was presented in the study of Chen et al. 5 for a control-oriented uncertainty model derived from the feedback linearization approach, and this designed controller was integrated with a high-order sliding mode observer to track the responses of the vehicle to a step change in velocity and altitude with partial state measurements. Unfortunately, it is difficult for the nonlinear inversion-based flight control of waveriders to simultaneously guarantee strong robustness as well as satisfactory transient performance.
On the contrary, there are some novel control strategies presented to improve transient performances of the closed system, such as the improved PD-type iterative learning control technique, 6 robust adaptive control technique, 7 –10 composite nonlinear feedback control technique, 11 integral sliding mode control technique, 12 –16 and variant-factor technique. 17 However, these control schemes are difficult to directly employ for the nonlinear model of waveriders which have complex flight properties, including strong coupling dynamics, unstable mode, and strong uncertainties. Meanwhile, the input saturation problem in the control design of waveriders should be considered carefully to ensure flight stability. This motivates us to put forward a new tracking controller for waveriders integrating the feedback linearization method and nonlinear control scheme to ameliorate the transient performance. In fact, this adaptive inversion controller can not only guarantee strong robustness and decoupling control ability, but also improve the transient performance for waveriders.
The outline of this article is given as follows. The second section deals with establishing the nonlinear model of waveriders with input saturation. The third section relates to the adaptive control law design for waveriders using the feedback linearization theory and nonlinear output feedback control to make better the transient performance. The fourth section involves the flight performance analysis with special regard to system robustness and tracking response features for waveriders. The fifth section provides an illustrative example of this proposed controller for a nonlinear longitudinal model of the waverider, and the integrated results are compared with those using the dynamic inversion control. Some concluding remarks are provided in the sixth section.
Modeling for waveriders
The model dynamics of the waverider is more complicated in contrast to that of the conventional vehicle, and this is because the structural dynamics affects the aerodynamic properties, whereas the propulsive efficiency is limited by the flight states. In turn, the thrust has a significant impact on the pressure distribution and structural vibration in the forward fuselage, as a result of the strong coupling relations among aerodynamics, propulsion, structure, and control. 18
Based on the flight dynamics principle, the longitudinal model of a waverider along the speed coordinate system XV, YV, ZV is identified by 19

where V is the flight speed; γ represents the flight path angle; q denotes the change rate with respect to the pitch angle; α indicates the angle of attack; and h is the flight altitude. In addition, m, g, and Iy denote the vehicle mass, gravitational constant, and moment of inertia, respectively. For equation (1), the lift L, drag D, pitch moment My, and thrust T determine the flight dynamics of the waverider, and they are calculated by

where δe and β are the elevon deflection angle and propulsive coefficient, respectively; S and

where ξ and ϖ denote the damping and frequency of the propulsive system, whereas βc is the control input regarding the thrust. For simplicity, air density ρ and gravitational constant g are applied as a function of flight height

When ignoring the influence of the lift and drag with respect to the elevon deflection in the control design, the corresponding aerodynamic coefficients are expressed by 21

where

where the flight state vector X is selected as
For the nonlinear model of the waverider, we first use the feedback linearization method to build an equivalent model. Considering the nonlinear model in equation (6), we assume that f, H, gδ, and gβ are smooth. Correspondingly, the Lie derivative of the function H along f is adopted by 22

The equivalent model corresponding to the nonlinear model (equations (1) to (4)) is gotten by 23


where

According to equation (10), we find that the resulting model has full vector relative degree
Nonlinear control for waveriders
After the above transformation, let

Furthermore, we consider the input saturation regarding the vehicle model, so the control design goal is to develop a nonlinear control law so that the outputs

where
Beyond this, we define a reference generator for the equivalent model 26

where
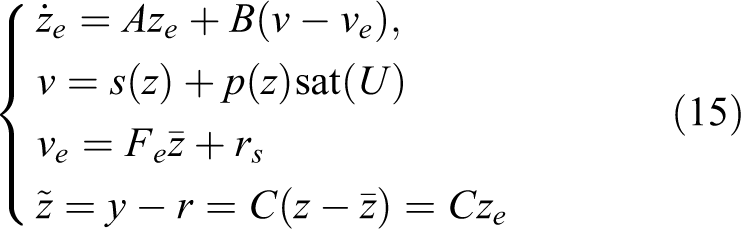
This error equation is used in the design of the nonlinear control law. Furthermore, a nominal point

the following condition holds

where
Theorem 1
Suppose that
The relative degree of the nonlinear model is
Then, the nonlinear control law is designed as

where

for
Thus, the control law comprising equations (18) and (19) will drive system output y to track arbitrary reference r from an initial state asymptotically without steady-state error, provided that the following properties are satisfied.
1. There exist a set of scalars,

2.

where
3. Let

Proof
Consider

When

Note that

for

for

for

When

for
For the results as

for

where

Based on equations (28) and (32), we obtain the following result

where

Moreover, substituting equations (33) and (34) into equation (15), we have

We choose a Lyapunov function below

Then, the derivative of Γ can be computed with equations (19) and (34) as follows

where
Performance analysis for adaptive inversion control
From the evaluating viewpoint of the control demands, first the consumed energy for the tracking response is required to be taken into account for the waverider. According to the total energy principle, if the aerodynamic drag force is neglected, the expected minimum energy in the control process is expressed by 28

In fact, the control energy is far more than that in equation (38) due to the presence of the aerodynamic drag and uncertain disturbance. Accordingly, the energy change rate is given as

where

where ts denotes flight duration time. Based on equations (39) and (40), the control performances among the distinct control laws can be compared from the viewpoint of the consumed energy. Such performance index is very important for the waverider because the carried fuel is strictly limited. Besides the direct energy calculation, the control performances are also compared for the different control laws in terms of the quadratic cost function

where QX and QU are the according weighting factors. From equation (41), we know such performance index reflects the coordinating relations between the flight states and control inputs, further determining the control energy feature. In addition, the overshoot percentages of the altitude and velocity can be calculated by

where
In general, the nonlinear adaptive control can improve dynamic performance, enhance system robustness, and implement tracking response. Thus, the following section will provide an illustrative example to test the advantages of the proposed controller for the waverider.
Illustrative example
This article uses the waverider model proposed by Bolender and Doma 29 to validate the feasibility of the presented control law, and a free body diagram is provided in Figure 1. Correspondingly, the flight control law is employed for the nonlinear model of the waverider to show the improved transient performance in comparison to that with the control law designed with the traditional control method.

Free body diagram of waveriders.
By using the least-squares fitting methods for these aerodynamic coefficients obtained from the work of Bu and Wang,
30
the resulting aerodynamic expressions with regard to

Next, we choose WV and Wh as the identity matrices, respectively. Afterward, the nonlinear gain functions in equation (18), which can decrease the chattering and improve the transient performance, are selected as

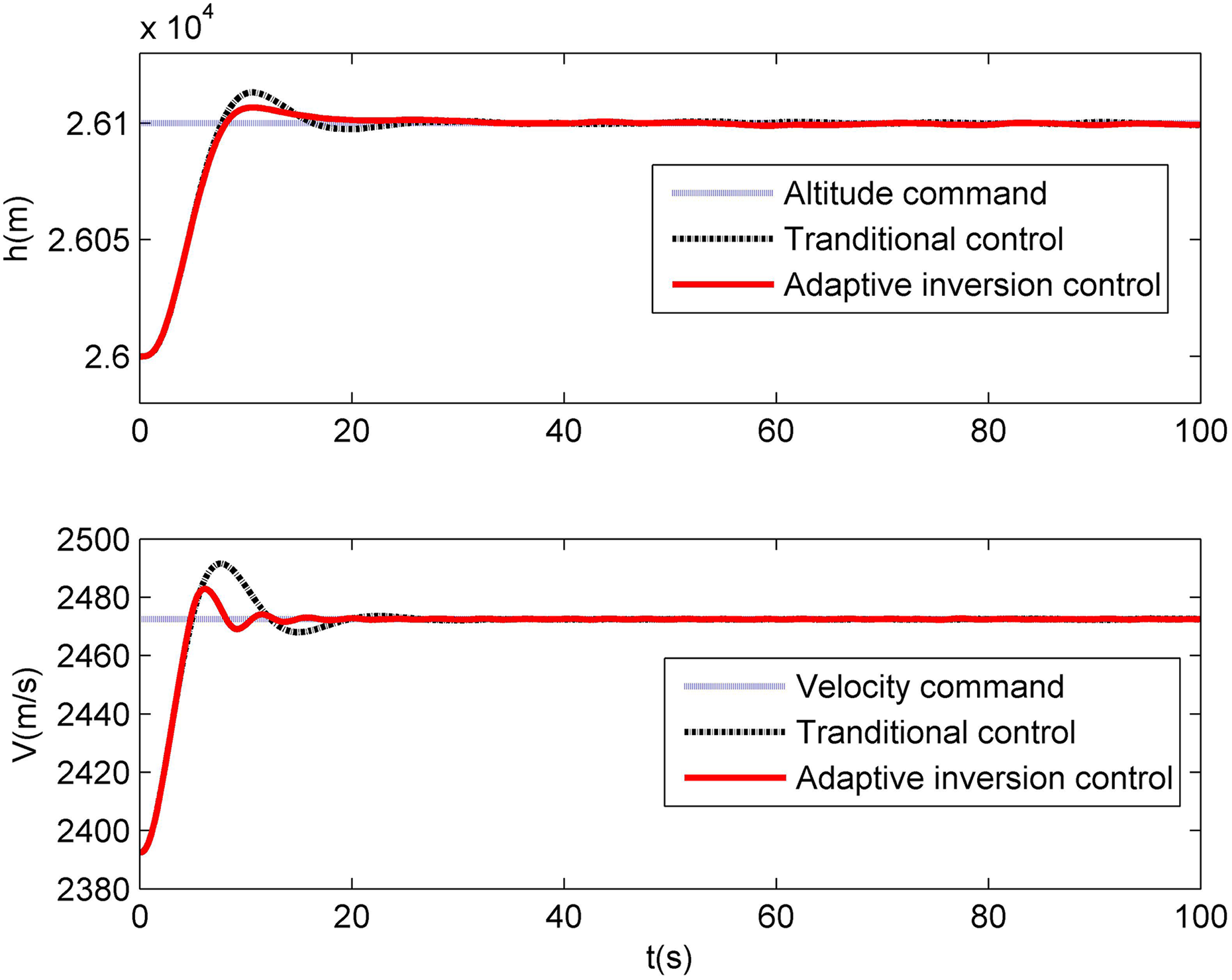
In the simulation, passing through 100 s the response curves are acquired corresponding to

Contrast curves between adaptive inversion control and traditional control.

Angle of attack and control inputs between adaptive inversion control and traditional control.
Figure 2 demonstrates that the velocity and altitude outputs can follow the command signals rapidly. Also, Figure 3 shows the change curves of the angle of attack and control inputs gently return to the anticipated balance values depending on the control action. Moreover, the error change curves regarding the consumed energy and quadratic cost index in equations (40) and (41) are provided in Figure 4.
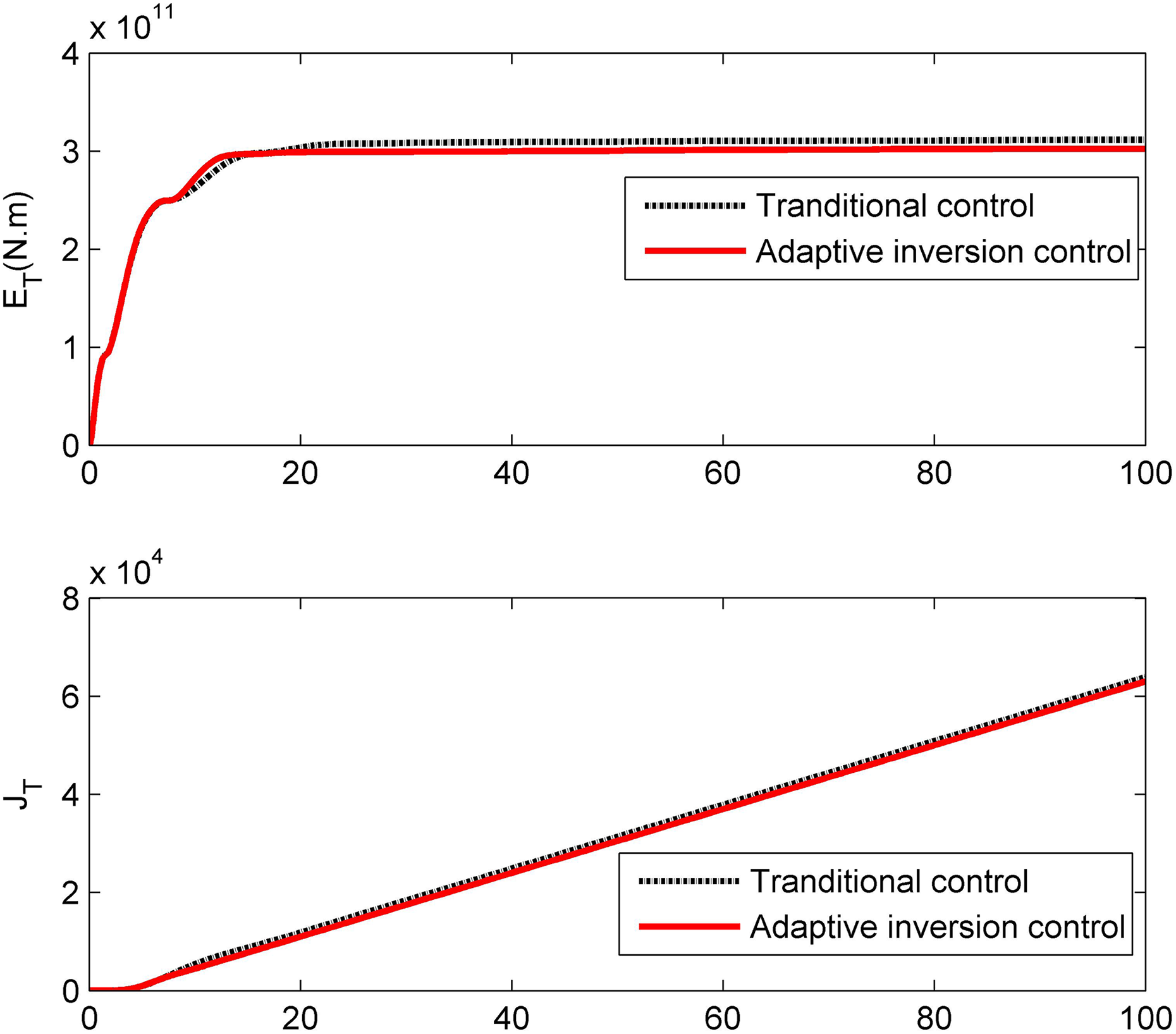
Control consumed energy and quadratic cost index.
Figure 4 demonstrates that the control energy using the proposed control law is less than that using the traditional control law, and simultaneously the performance index of this controller is better than that using the traditional control law. Such results display the adaptive inversion control can guarantee the optimal control consequence in comparison to the control law designed based on the traditional control law. Furthermore, the dynamic performance indices with regard to the overshoot and setting time in equation (42) are given in Table 1.
Dynamic performance indices in the track process.

According to Table 1, we know that the dynamic performance indices using the flight control law with the adaptive inversion control are better than those using the traditional control law. For example, setting time decreases dramatically due to the existence of the nonlinear part. Besides that, we further take into account the model uncertainties, given by

where
Track response curves for uncertain model.

Angle of attack and control inputs for uncertain model.
From Figures 5 and 6, we observe that the response results are satisfactory even in case of the large uncertainties, and the velocity and altitude tracking errors keep small as the response process enters to the steady state. In addition, the angle of attack and control inputs appear to jigger due to the uncertain effects, surrounding with the respected steady values. Alternatively, the undesired chattering in Figure 6, which is induced by the model uncertainties and sat function, will be ameliorated using the nonlinear gain functions, and this indicates that the control action can not only maintain system stability, but also guarantee strong robustness.
Conclusion
This article proposes a nonlinear adaptive control law for the waverider, and the results indicate that the proposed control law improves the transient performance. More importantly, strong robustness of the closed-loop system is guaranteed for the waverider even while considering the large uncertain disturbances as well as the input saturation. Nevertheless, it should be noted that, in this article, we have assumed that all flight states can be measured to feedback, thus the future work is to research the state observers for this presented control law such that these flight states can be estimated as a result of satisfying the requirements in the real application.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by Fundamental Research Funds for the Central Universities under Grant numbers NZ2018008 and NS2017060, and the open funding project of State Key Laboratory of Virtual Reality Technology and Systems under Grant number VRLAB2018C04.