This article presents an event driven mechanism in order to develop an altitude and attitude tracking controller for quadrotor type unmanned aerial vehicles (QUAV) with model uncertainties, disturbances and actuator saturation. A compensation system is introduced and implemented in order to overcome the input constraints and simplify the controller design process. Then, a nonsingular terminal sliding surface is defined to achieve finite time reaching to the desired trajectories in presence of unknown disturbances and uncertainties and motor angular speed limit. Additionally in order to avoid frequent periodic control signal transmission, event based triggering mechanism is implemented for the designed Terminal Sliding Mode Control (TSMC) law. The Lyapunov technique ensures tracking of the desired dynamics in finite time in case of event based TSMC implementation. It has been demonstrated that a positive lower constraint exists for the inter-sample time in order to prevent Zeno behavior. The efficiency of the control scheme is investigated using numerical simulations for quadrotor system. Simulation results show that the suggested control scheme ensure finite time trajectory tracking performance with less control update thus minimizing resource usage.
Research on QUAV systems has advanced significantly over the past few decades, driven by factors such as technological progress, the miniaturization of open-source autopilots, and improved ease of use. Due to their appealing features, which include vertical take off and landing, maneuvers like hovering, ease of operation, minimal maintenance cost and affordability, QUAVs are becoming more and more common among small aircraft types. Thus, it has gained widespread popularity and has found broad applications across the industrial, military, and civilian sectors, including precision agriculture, monitoring and surveillance, fire support, wireless communication networks, and rescue operations,1–3 among others. However, designing an effective controller for trajectory tracking and stabilization of quav is challenging due to its nonlinear dynamics and strong coupling in translational and rotational motion. Additionally, under-actuation and maximum limit on motor speed and thrust can further degrade system performance. These challenges become even more complex when system uncertainties and external disturbances are considered.
For precise trajectory tracking control of quav, a variety of control methods have been reported in the literature, including adaptive neural networks, robust control using sliding mode, fuzzy and backstepping control using reinforcement learning in Ref. [4]–[7]. However, only the asymptotic stabilization of the closed-loop system is considered in the aforementioned works. In many practical scenarios, processes with asymptotic convergence can lead to unsuccessful task completion and are susceptible to disturbances. Additionally, stability and tracking performance is challenging in presence of payload variations, model uncertainties, and disturbances such as wind and input constraint. The sliding mode control (SMC) technique becomes popular as it offers many features like stability against nonlinearity and parameter perturbations, resilience to external disturbances considering environmental wind and actuator saturation, finite time reachability to the desired path, and easy applicability. In Ref. [8]–[13], and in numerous other works, the SMC technique has been investigated recently in quad-rotor UAV control, addressing its underactuated features, parametric uncertainties, and external disturbances.
In nonlinear complex systems such as quav, actuator input saturation can cause oscillatory transient behavior which sometimes lead to instability. To mitigate this issue, a compensating feedback mechanism is employed to ensure system’s desired performance against input saturation. Shao et al.14 proposed adaptive sliding mode control strategy for quadcoptor stabilization in presence of input constraint. Though classical SMC guarantee finite time stabilization but it fails to ensure convergence within a predefined time. In order to improve the convergence characteristic and attain finite-time convergence, nonlinear-sliding function based terminal sliding mode control (TSMC) approach were suggested in Ref. [15]–[19]. TSMC based flight controller is presented in Hou et al.20 for quad-rotor with a complete rotor failure. Mofid et al.21 an adaptive backstepping global SMC is offered for finite-time trajectory tracking of quav with motor speed limit. Some other works on this issue are reported in Ref. [22]–[24].
It should be mentioned that the works mentioned above are mostly focused on the traditional time-triggered mechanism, where control command determination and transmission are driven by time intervals. This can lead to inefficient use of computation and communication resources or channels due to redundant sampled data. In contrast, the event-triggered mechanism updates controller information regularly only in response to a predetermined event, making it an effective technique for reducing transmission channel bandwidth (see Ref. [25]–[29]). A novel approach called event-triggered sliding mode control (ETSMC) has recently attracted more attention by integrating SMC with event-triggering strategies.27 A number of intriguing results about various ETSMC strategies have been reported; for instance, Ref. [28], [30], [31], and [32]. Compared to the case of ETSMC with linear sliding surfaces, the design of ET-based TSMC is more difficult due to the intricacy of the terminal sliding function. Designing an ET-based TSMC approach for a complex nonlinear QUAV system with uncertainties, disturbances and input saturation is the goal of this study. It is evident that the suggested control scheme outperforms the traditional approach. The event-triggering condition, which ensures TSMC stability, finite time convergence, and robustness for the quav type nonlinear system, is developed using Lyapunov theory. Note that, in contrast to the related works in Ref. [6], [12], [18], and [19], here event triggered implementation of nonlinear terminal SMC strategy is considered for QUAV system with actuator limit.
An event-trigger mechanism is shown to be stable when a non-zero lower bound constraint on inter-event time is established. If not, this mechanism leads to infinite number triggering in a finite amount of time referred as Zeno phenomenon under which implementation of control command becomes practically infeasible. Thus, the main objective is to develop a triggering mechanism that guarantees the stability of the ET implementation of derived control law. The triggering sequence generated by the proposed triggering rule is thus has to be globally Zeno-free (see Ref. [27], [33], and [34] for more information). Because of the intrinsic complexity of the QUAV system considering model uncertainty, matched disturbance like wind and input constraint, event-based systems become a novel area of research.
In response to the aforementioned discussion, we develop a finite time trajectory following protocol with optimal resource usage for nonlinear coupled under-actuated system of quav with model uncertainties, disturbances and input constraint. The following are the primary contributions.
An event-triggered nonsingular TSMC technique is formulated for nonlinear QUAV systems with input constraints and disturbances. The proposed strategy combines the advantages of TSMC and event-triggered techniques. Finite time trajectory following is guaranteed.
A comparison of controller performance between the time-triggered implementation of the adaptive SMC scheme proposed in Mofid et al.36 and the ET-based implementation of the designed TSMC law is presented. It is evident that the ET based implementation of the proposed control scheme outperforms the traditional periodic implementation of the control law presented in Mofid et al.36, both in terms of tracking accuracy and resource usage.
Lyapunov theory is used to develop the event-triggering condition, which guarantees TSMC stability, finite time convergence, and robustness for the considered QUAV nonlinear system with actuator saturation. Unlike the asymptotic tracking of ET based control implementation in Ref. [30], [32], and [35], finite time convergence of tracking errors is ensured here.
For controller admissibility, the time difference between any two successive triggering instants is shown to be lower bounded by a finite positive number.
This article is divided into the following sections: Section “Problem formulation” presents formulation of the problem statement with quad-rotor dynamical state-space model considering input saturation. Section “TSMC based tracking controller” proposes the TSMC approach for finite time altitude and attitude tracking and stability against input constrained and external disturbances. Section “Event triggered implementation of TSMC” presents an event trigger strategy for implementation of TSMC law. Section “Simulation results” discusses the results of the simulation. In Section “Conclusions,” conclusions are presented to summarize the findings.
Problem formulation
The present work considers implementation and design of finite time robust tracking of altitude and attitude of QUAV in presence of actuator saturation with optimal resource usage. The formulation considers only four degrees of freedom tracking for under actuated system of QUAV with modeling uncertainties and actuator saturation. Thus, the primary objective of this work is to provide an aperiodic finite time robust-accurate controller, for a QUAV, that can drive required degrees of freedom quickly to reach their reference value in presence of uncertainties and actuator limit.
Actuator saturation model
In the trajectory tracking control of quad-rotor UAVs, input saturation plays a critical role in maintaining stability, safety, and performance, particularly due to the physical limits of the UAV’s actuators, such as rotor speed and thrust. To prevent input commands from exceeding operational limit, a saturation function must be applied. Implementing these constraints ensure that the control system does not command infeasible inputs that could destabilize the quav dynamics, especially during aggressive maneuvers or in the presence of external disturbances like wind.
The quad-rotor system has six degrees of freedom (DOF), consisting of three position variables and three attitude angles that need to be controlled. However, only four independent motor controls are available, making the system underactuated. The positions are primarily controlled by a single input, such as thrust, while the attitude control requires three distinct torque inputs. As a result, input saturation has a significant impact on the quav’s attitude angles. The control input, denoted as for , is constrained within a specific range and is subject to saturation, meaning it cannot exceed a maximum value of . This saturation effect is mathematically represented by the following equation:
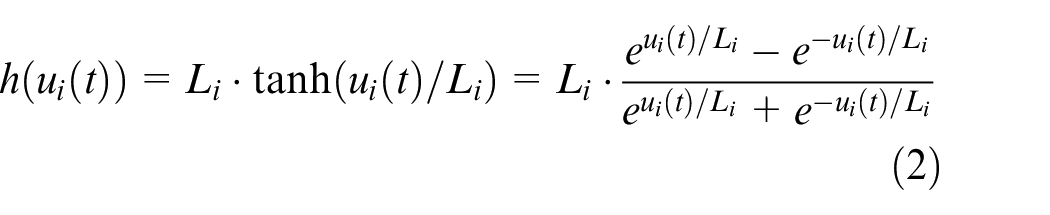
Here, represents the known upper bound of the saturated control input . The nonlinear function is approximated by a smooth function defined as
The hyperbolic tangent function, , is a smooth version of its saturated counterpart, facilitating smoother engine operation. The approximation error is defined as which is bounded as
According to the mean-value theorem, can be expressed as [see Guo et al.37]:
The nonlinear function denotes the degree of saturation of the actuator. If , the actuator is not operating in saturation. While is bounded between and , it varies with time. Saturation indicates the value of is close to zero. Also to note that is lower bounded that is, as in Guo et al.37
Remark 1.In a quad-rotor system, actuator saturation can affect all inputs simultaneously, either to the same extent or to varying degrees. By selecting an appropriate values for , it is possible to impose saturation on a specific rotor as desired.
UAV nonlinear model with actuator saturation
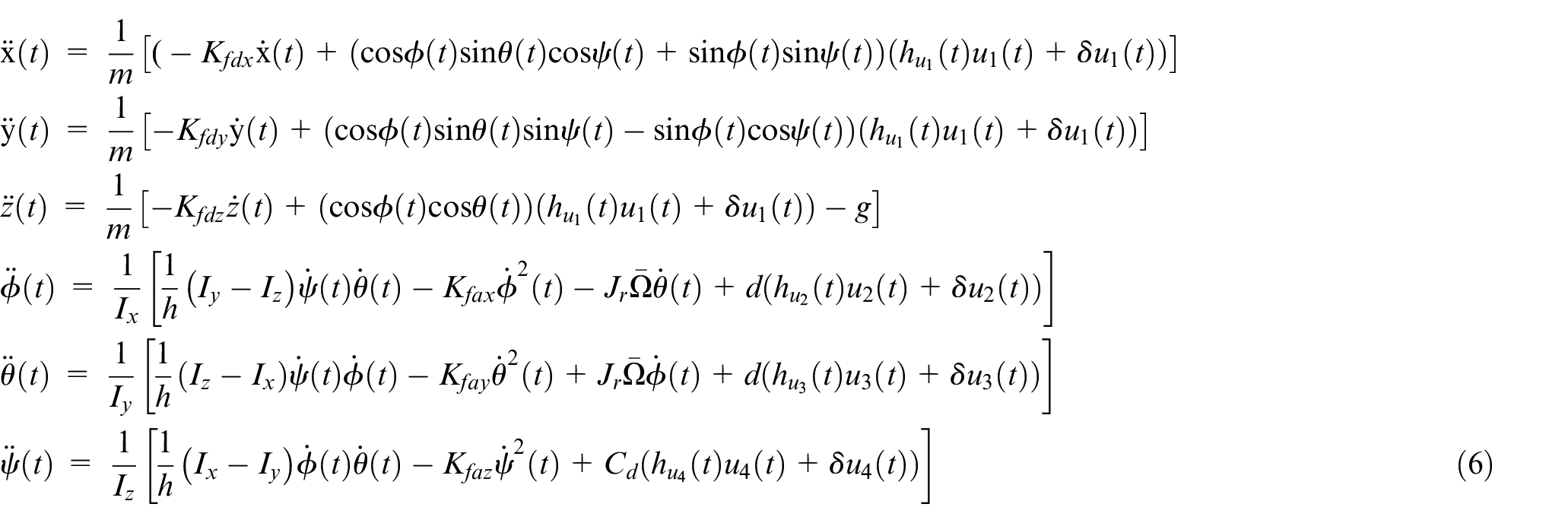
Based on the state-space model given in Mofid et al.36, the degrees of freedom dynamical equation of a QUAV with actuator saturation is stated as:
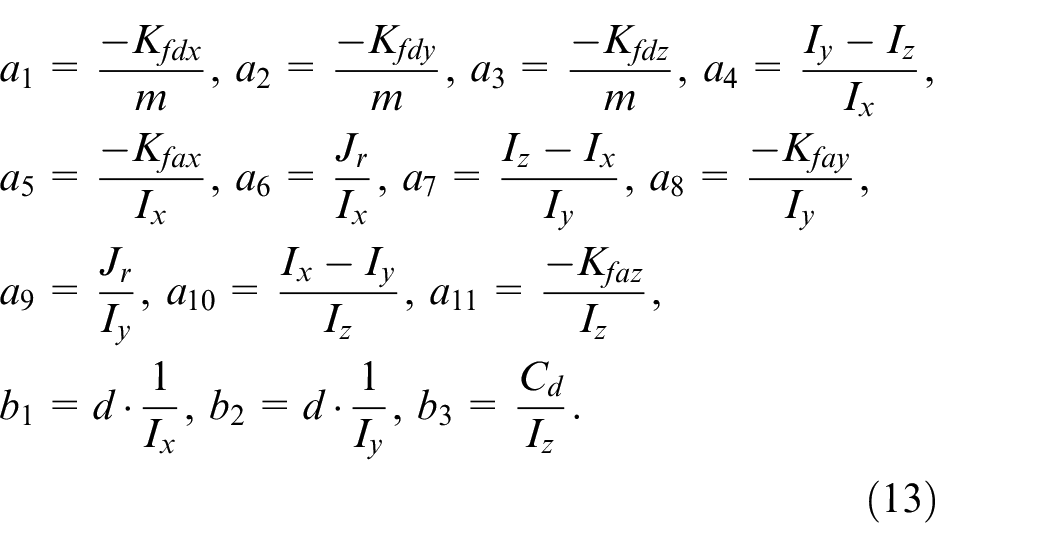
where and specify aerodynamic friction factors; and are drag constants; is the drag factor; The distance is the rotating axis of the propellers from the center of the quad-rotor. The inertia moments with respect to the , and axes are denoted by , and . is the motor inertia. Moreover,
where and represent the angular velocities with the subsequent laws.36
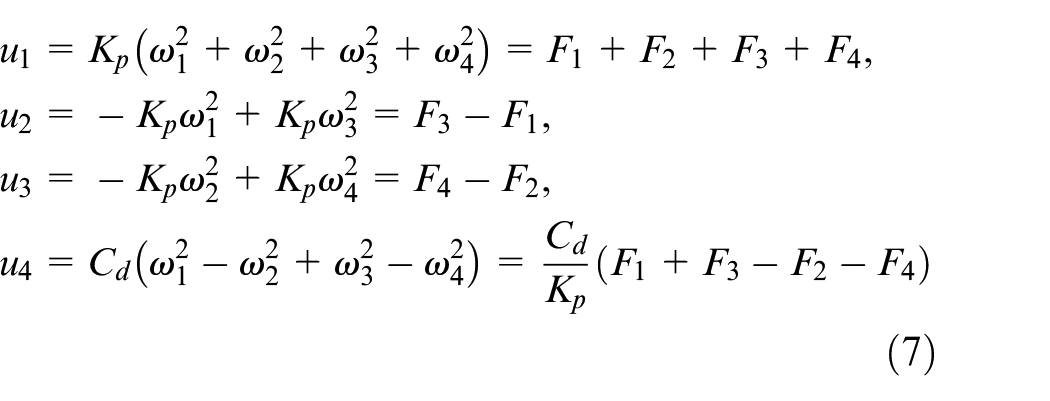
The variables , and are control inputs of the system which correspond to the angular velocities of four propellers as
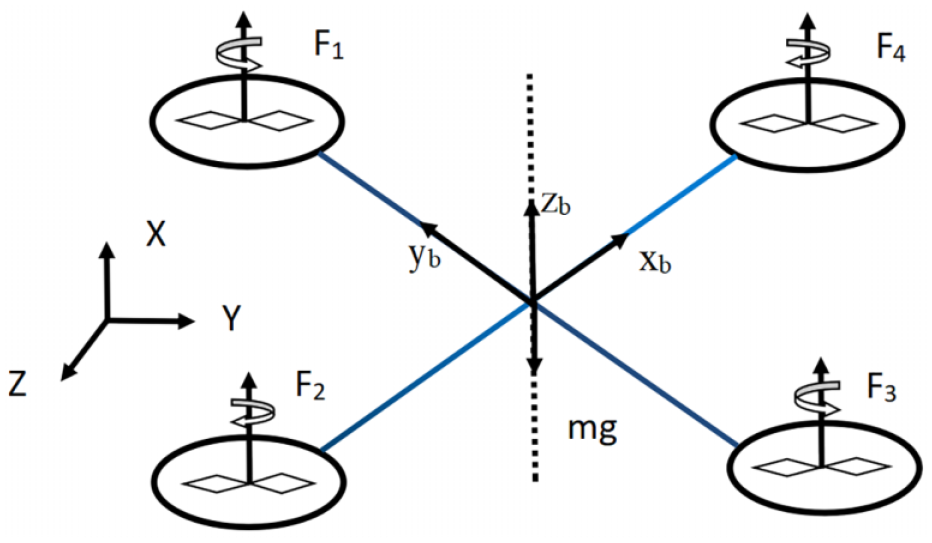
The input is known as thrust, and is known as torque are generated by the combination of lift forces produced by four motors as depicted in Figure 1.
Schematic Diagram of Quad-rotor.
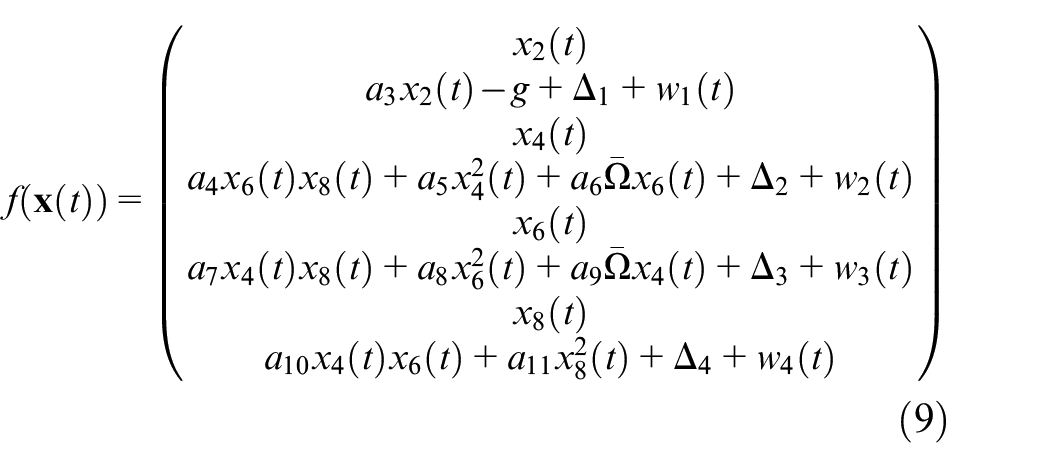
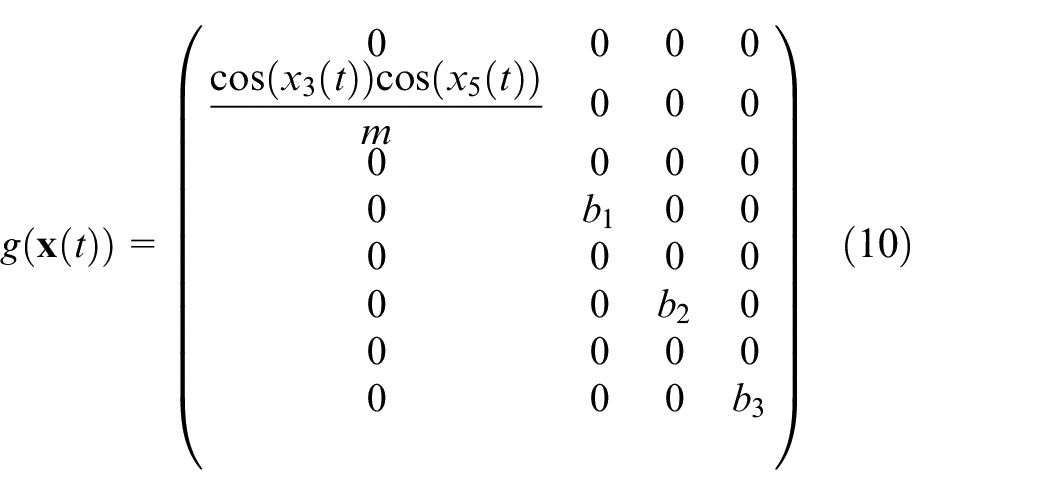
A quad-rotor, which has dof, is an example of an under-actuated system. This under-actuation places a restriction on the number of configurations of the system that can be directly controlled. In particular, because there are insufficient control actions in its configuration space, the system is unable to follow unconstrained flight in entire vector space. In this work, only four states thus considered for tracking the desired trajectories. Considering state vector accordingly as , the state space dynamical model in (6) is reformulated as:
where
and is the system uncertainty vector comes from the inaccurate knowledge of mass and moment of inertia of the motors and quad-rotor. The external disturbance vector includes sudden wind gust and the effect for input approximation error on the dynamics in (6). Note that, approximation error is bounded i.e., . Given:
Assumption 1.Consider that external disturbance vector and model uncertainty vector satisfy the following condition:
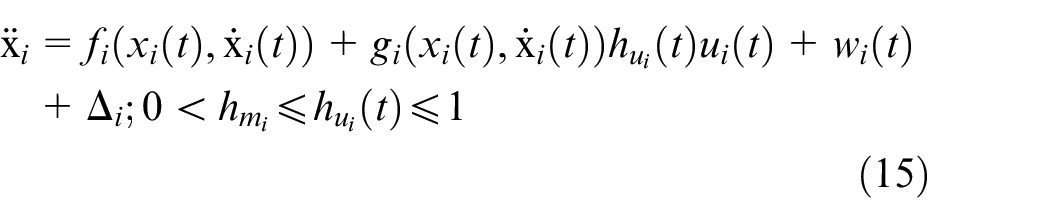
With the defined parameters in (13), the state space model for these four states can be restated in general form as
representing second order dynamics for each of the four states.
TSMC based tracking controller
Designing sliding surface for the quad rotor system requires tracking error to define first. Let are the components of the desired vector. Tracking errors of the system are then defined as follows:
To ensure finite-time reachability to the desired trajectory of the QUAV, the following nonsingular terminal sliding surface (NTSS) is defined as (suggested in Ref. [15]–[17]):
where is design constants, and are positive odd integers such that . Calculating the time-derivative of along the system dynamics, we obtain:
Considering the lower bound on motor angular speed , the upper bound of control is obtained as
Finite time reaching to the sliding surface is ensured by the control where is the switching control brings resilience to the uncertainties and disturbances. Using Assumption 1, the total control is defined as
where are the design parameters.
Theorem 3.1.If the NTSS manifold is selected as in equation (17) and the control law is constructed as in (22), the trajectory following errors defined in (16) for the QUAV system in (15) converge to zero in finite time.
Proof. Consider the positive definite Lyapunov candidate function . Calculating the derivative of the function, the following is obtained: . Using equation (18), we obtain
Using control (22) in expression in (19), we obtain
Since the range of the fraction is , hence, (according to Feng et al.16] and Zhao et al.17)
Thus,
Thus,
The condition in (26) ensures that the system dynamics reaches in finite-time for some . If then the manifold is reached in finite-time (see Feng et al.16), leading to sliding motion in finite amount of time.
Reaching sliding surface , the reduced order system dynamics obtained from eqn. (17)
The tracking error is the terminal attractor of the system (27).
Given and when , the error dynamics will reach equilibrium in a finite amount of time specified by Feng et al.16):
The finite time required to travel from to . Hence, the equilibrium is reached in finite time. □
Event triggered implementation of TSMC
This section focuses on ETC based implementation of TSMC law derived in (22) and corresponding stability conditions. Control rule must satisfy the following main criteria: (1) Ensuring finite time stability of the system. (2) Adhere to the Zeno-free operation of triggering sequence.
For derivation of ETC, we consider the state model with actuator saturation in (15) represented for each of the states. Defining the vector for each of the states as , where is the tracking error and is the desired trajectory, dynamics for is then expressed as
The control law derived in (22) can be thought of as a function of , , where . A parameter called Event Trigger Error (ETE) is defined below to develop the triggering condition.
where . The variable is different from error . The purpose of defining the in terms of and is to design the triggering condition based on stability analysis using Lyapunov method. Equation (29) can also be written as perturbed dynamics using the ETE as
The next section presents a new method for designing Event Triggered TSMC for nonlinear dynamical system described above with input motor saturation and external disturbances. For the function over the set
a Lipschitz constant, is defined. Thus, following bound can be written
Inspired by Mustafa et al.35 and Li and Zhai30, following theorem and corresponding proof is proceeded.
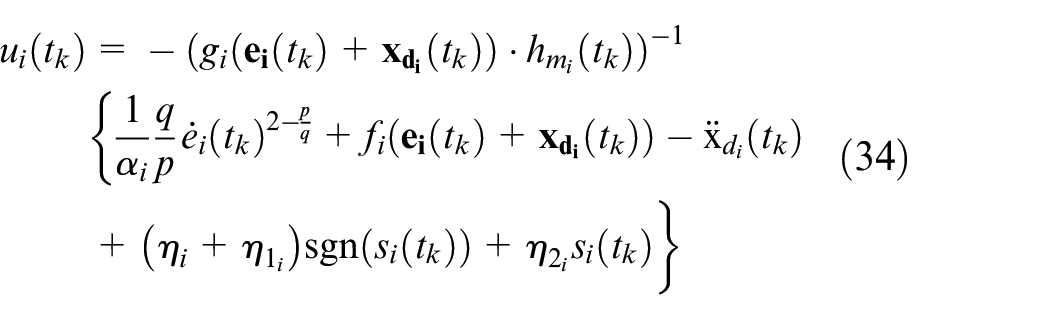
Theorem 4.1.An ET-based fast non-singular TSMC control law is designed for the QUAV system (15) as follows:
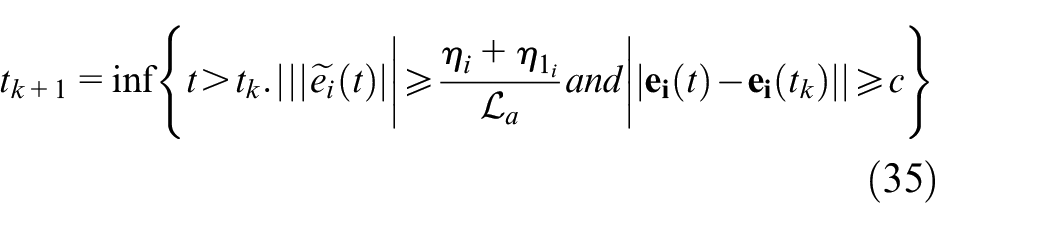
where denotes a triggering instant. An event is triggered and the control input is updated if the following conditions are met:
where is defined in (30)
for all in the interval
where . Consequently,
The sequential occurrence of these events drives to zero in the presence of disturbances, thereby demonstrating the system’s finite-time stability.
Proof. Considering for the system described in equation (15). The derivative of the function can be written as: ; which is further elaborated using (19), (31), and definition of in (24) as
Using the fact , and in (22) and the Lyapunove bound obtained in (25), the above equation can be expressed as:
According to (33)
By utilizing ETC in (34), above equation is evaluated as:
The above equation can be rewritten as
Note that, until the sliding variable reaches manifold , its remains unchanged. Consequently, is established. Thus, using the triangular inequality, the above equation is restated as
Now, if , are Lipschitz for a defined set, then,
The above equation can be written in terms of event triggered error (as defined in (30)) as
Using (44), the second term in inequality (37) can be written as
where . Thus inequality in (37) can be written as
Using the triggering condition in 1, the above inequality becomes,
The above inequality can further be written as
This ensures finite time convergence of system trajectory defined by (15) to the sliding surface in case of ETC implementation of NTSS. The updating of control signal requires meeting of threshold criteria item 1 and item 2 in Theorem 4.1. Thus,
This concludes Theorem 4.1’s proof. □
The inter-execution time for updating the control rule in an event-triggered system is known as admissibility, and it is required to be lower limited by a finite value to avoid Zeno behaviour.
Theorem 4.2.Event-driven control for the system in (15) is updated when the conditions in (theorem 4.1) are met. For the system’s admissibility, the inter-event time is lower bounded by a positive constant
Proof. A stable execution of ETC law is ensured by avoiding Zeno phenomenon. Using the triangular inequality, (31) can be written as:
For be a Lipschitz constant defined on compact set according to (32), above inequality becomes
As and are assumed to be bounded according to (32), the above inequality is further be written as:
According to the ETE definition in (30), the rate of change of it is
Thus, the lower bound on triggering interval is obtained according to Mustafa et al.35 as
The value of depends on and . □
Simulation results
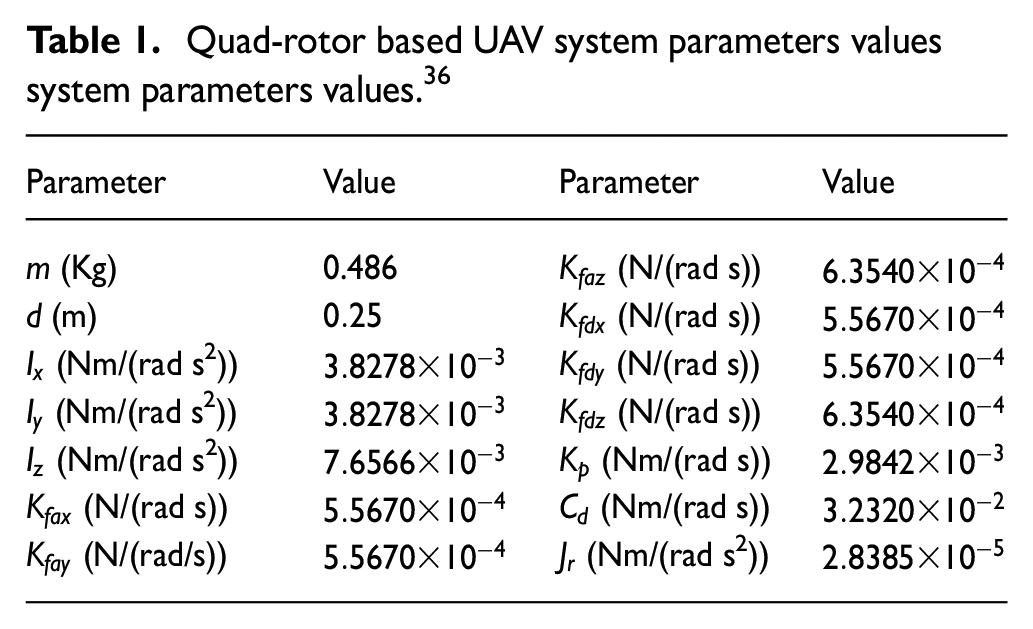
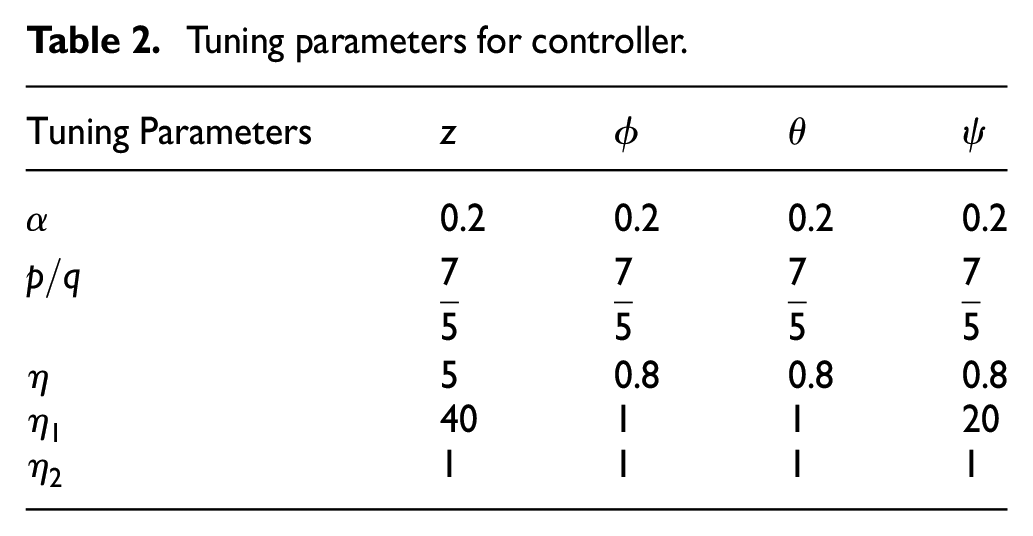
The suggested ET based TSMC for height and attitude tracking problem in presence of actuator input saturation for QUAV is validated in this section. A MATLAB simulation is used to confirm the suggested TSMC’s robustness and efficacy. The values of the system and design parameters are listed in Tables 1 and 2 below. The initial position and orientation of the QUAV are considered as . The target values are assumed to be , , , , same as Mofid et al.36 The results have been obtained for time-varying external disturbances same as considered in Mofid et al.36, , , . The uncertainty and external disturbance bound considered for simulation is specified by in Table 2. Simulation results are generated under actuator input saturation, with control bounds specified as: , and according to the equation (1). The Lipschitz constant in (45) is found to be . The sampling period considered is and the simulation time is . The design parameters of the TSMC is given in Table 2.
Quad-rotor based UAV system parameters values system parameters values.36
Parameter
Value
Parameter
Value
(Kg)
0.486
(N/(rad s))
(m)
(N/(rad s))
(Nm/(rad s2))
(N/(rad s))
(Nm/(rad s2))
(N/(rad s))
(Nm/(rad s2))
(Nm/(rad s))
(N/(rad s))
(Nm/(rad s))
(N/(rad/s))
(Nm/(rad s2))
Tuning parameters for controller.
0.2
0.2
0.2
0.2
5
0.8
0.8
0.8
40
1
1
20
1
1
1
1
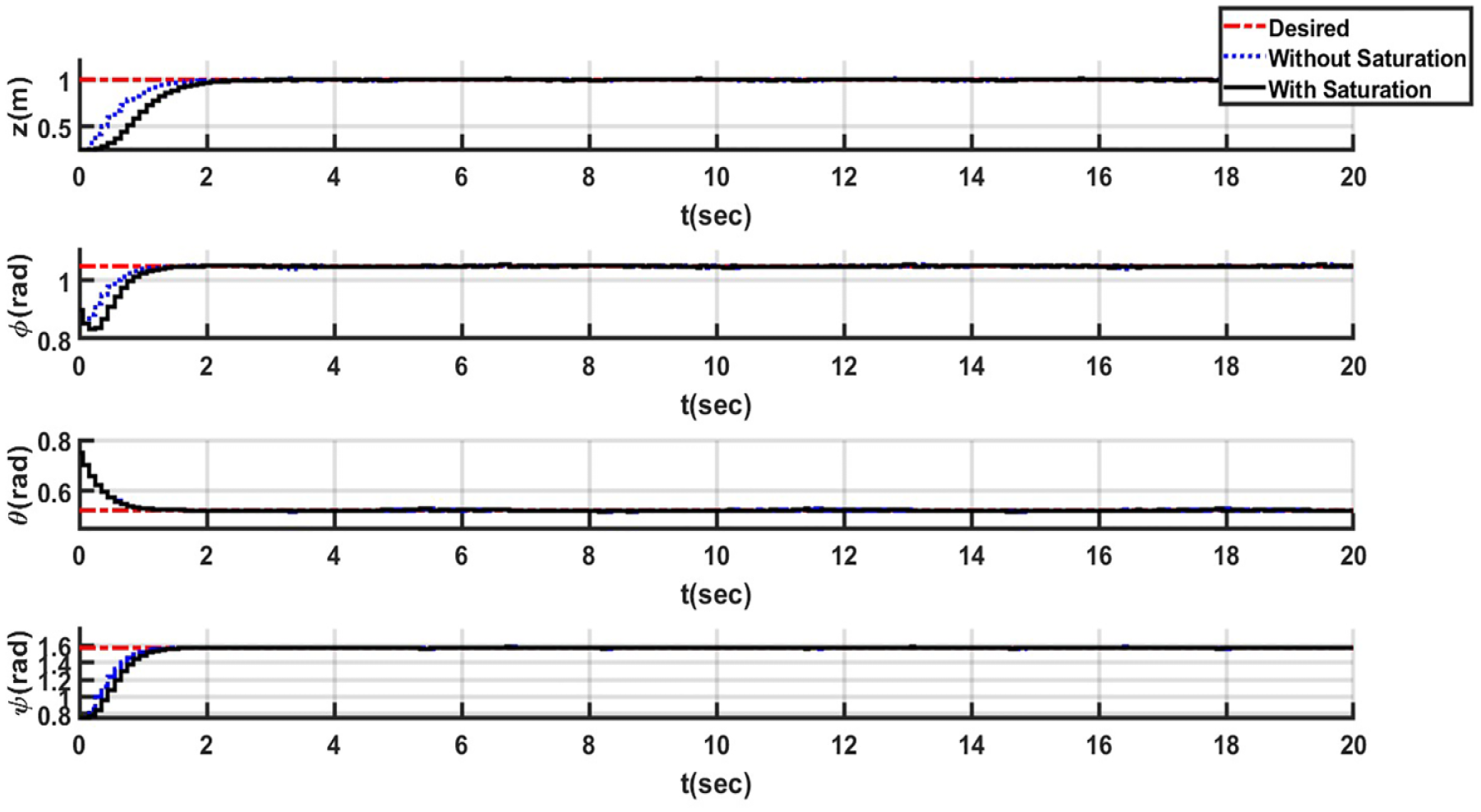
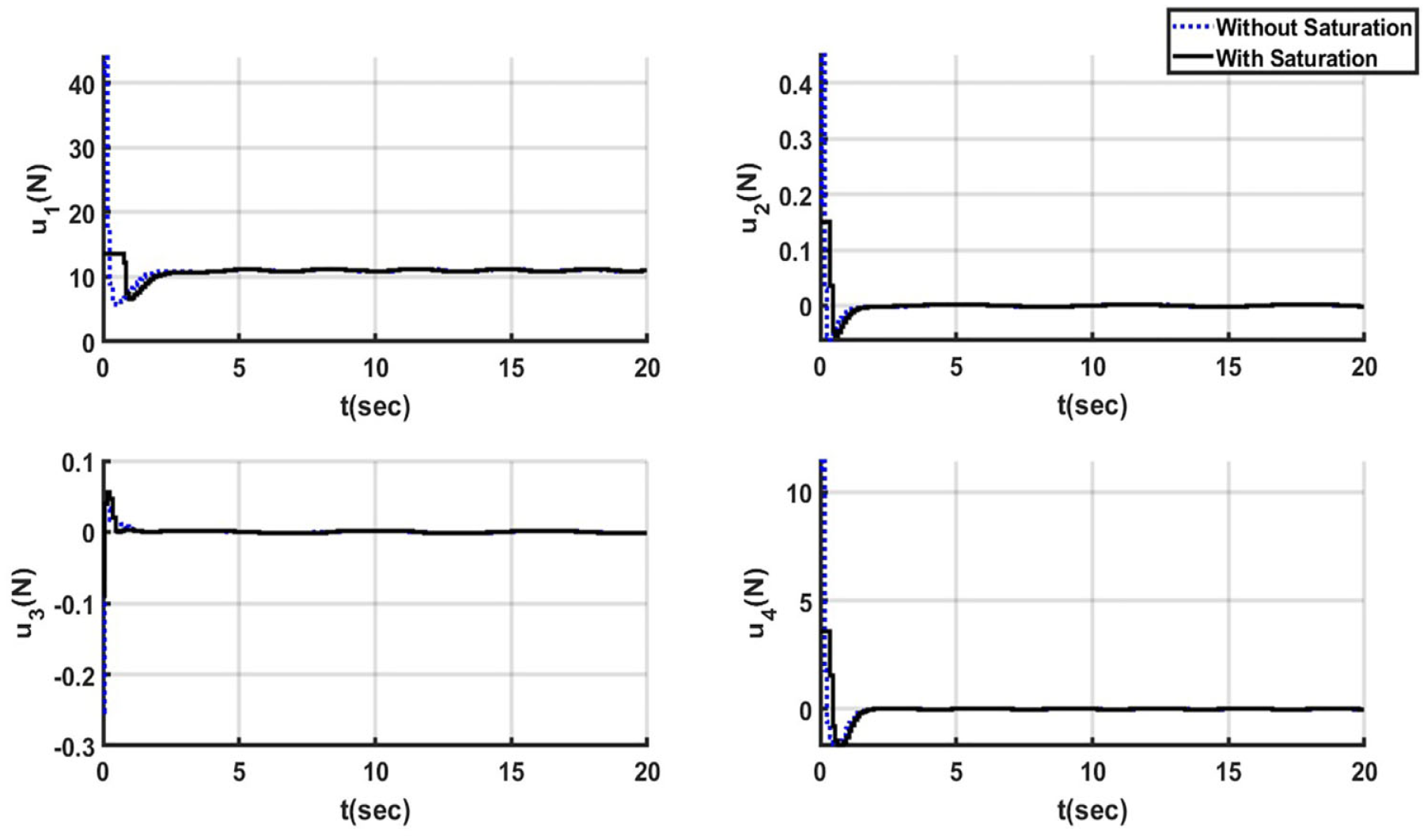
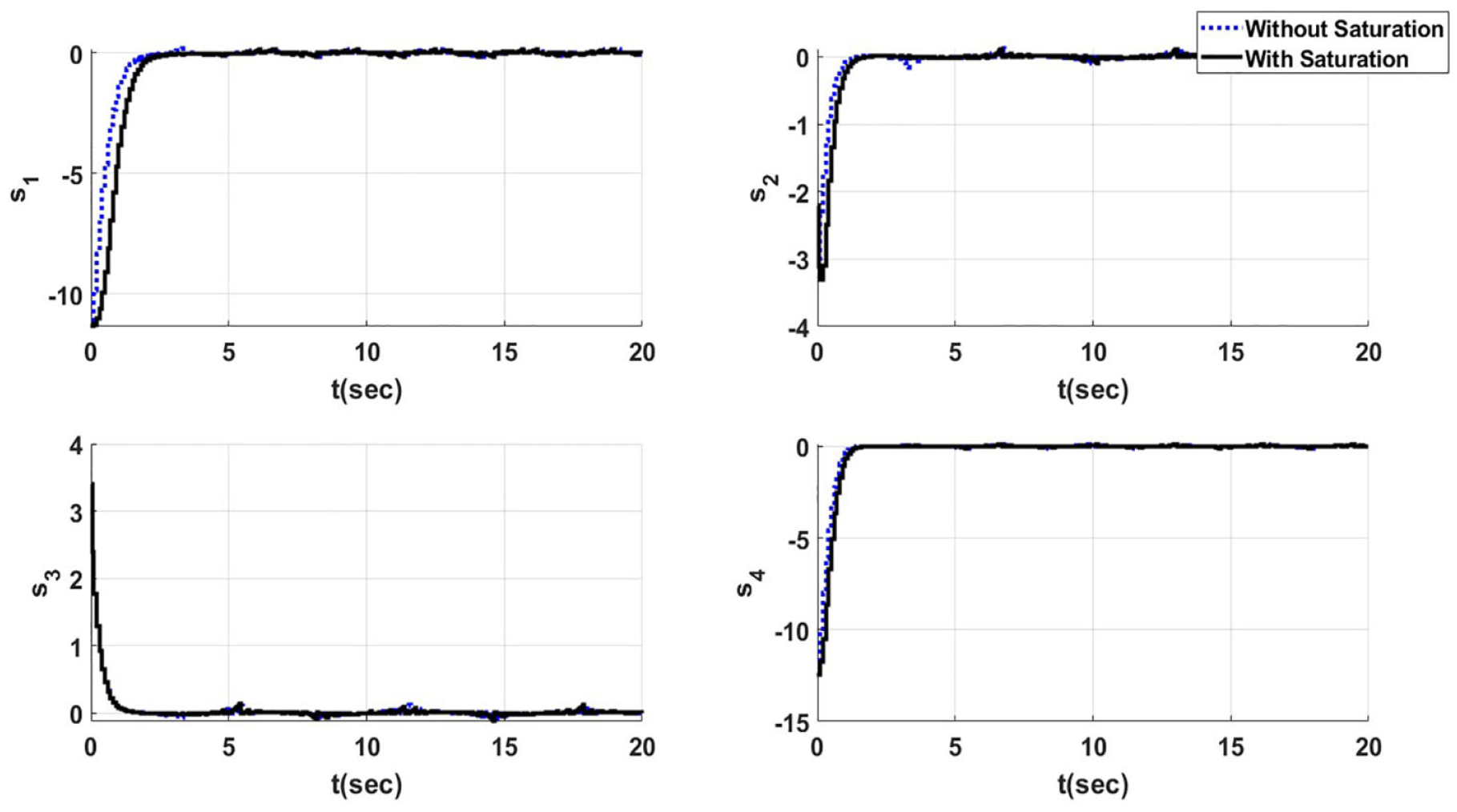
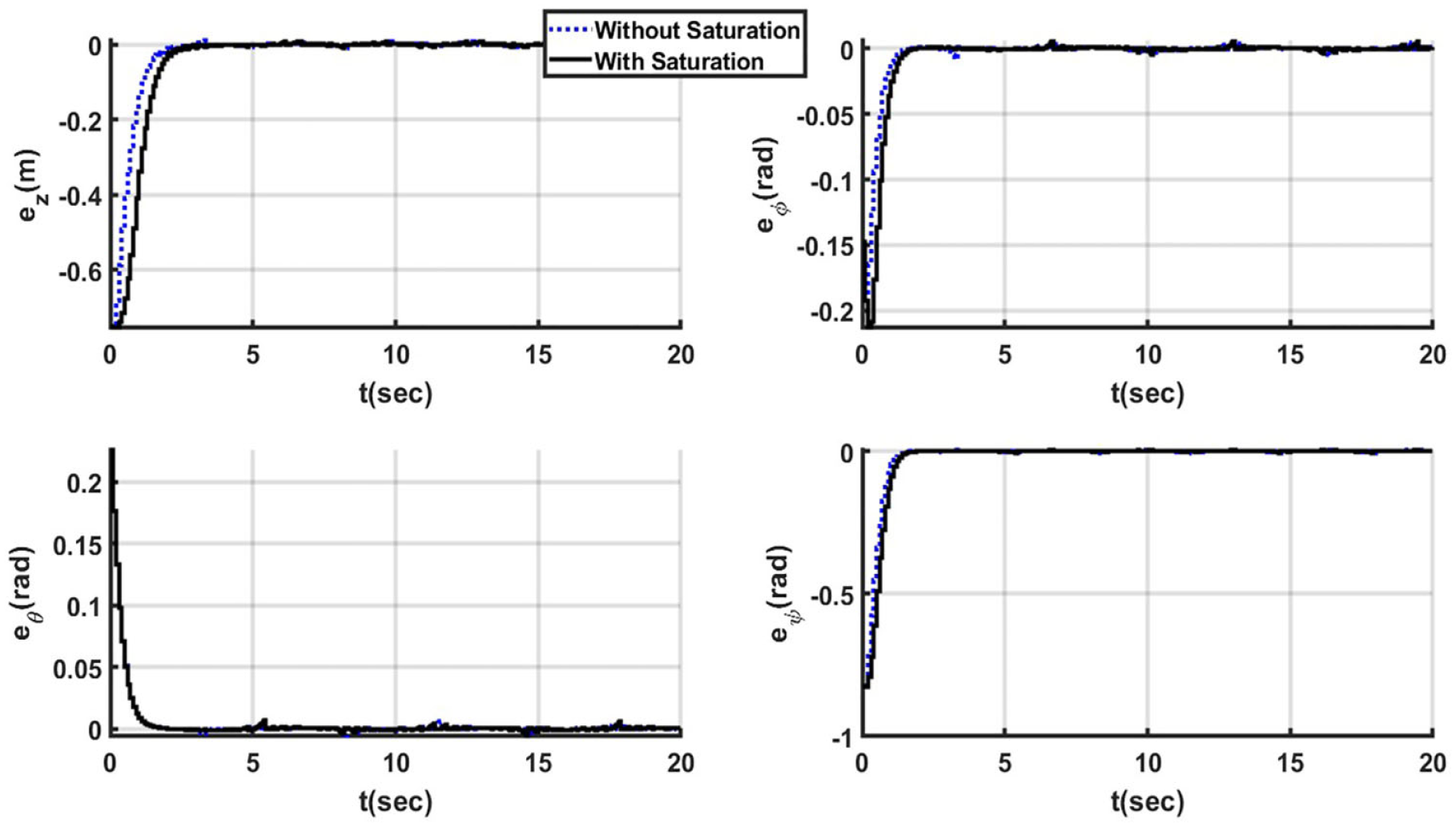
The system’s states trajectories with bounded external disturbances under input saturation are shown in Figure 2. It is evident that, the tracking goal is met when ET based TSMC in (34) is applied to the QUAV system in (15) with input saturation. System’s tracking performance along with the control requirements are compared for with and without actuator motor saturation in Figures 2–5. Actuator saturation considered for all the input channels is %. Figure 3 shows that under constrained input and external disturbances, there is no chattering in the ET based TSMC signals. The sliding surfaces’ time trajectories are displayed in Figure 4, which illustrates finite-time convergence. Figure 5 depicts how the error signals for converge to zero in a finite amount of time according to the expression in (28). This certainly meet the terminal property of the ET-based TSMC law.
State trajectories tracking in presence of bounded disturbances.
Control signals for trajectory tracking.
Sliding variables for trajectory tracking.
Error signals for trajectory tracking.
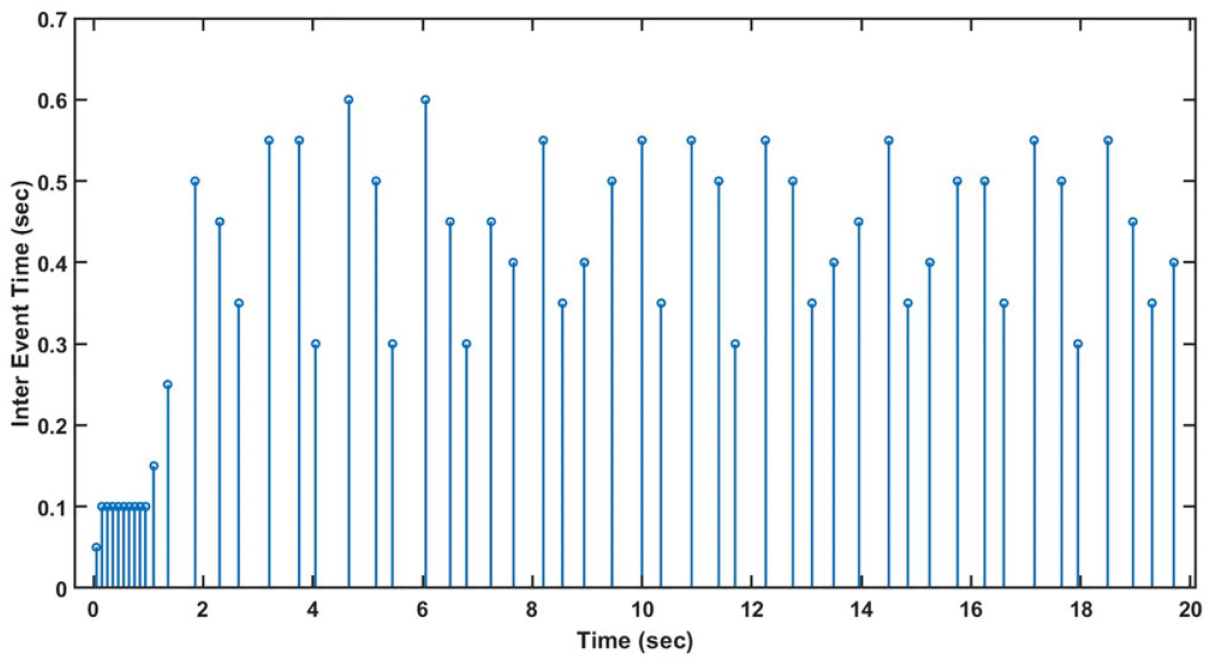
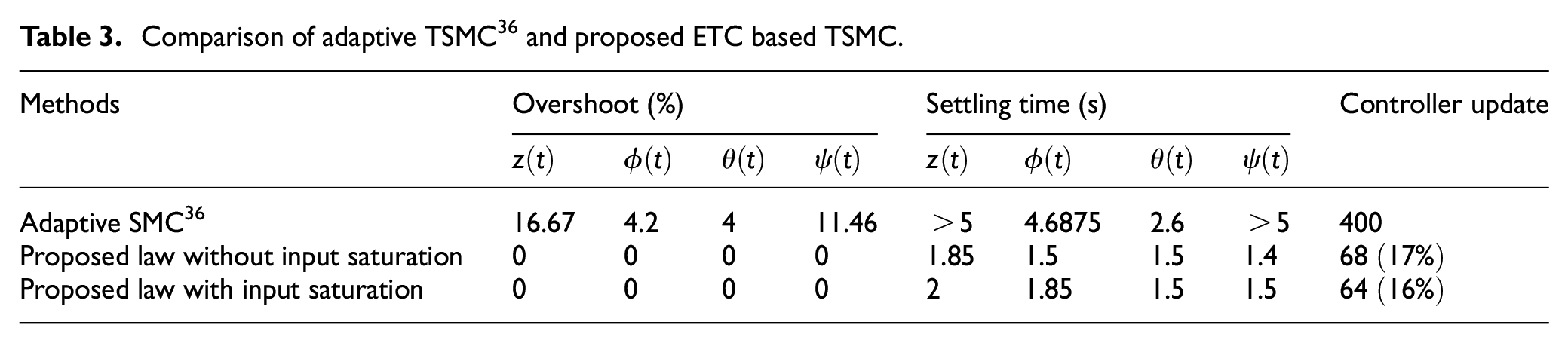
Figure 6 shows the inter-event time. Initially for tracking, control needs to be applied periodically unless trajectory reaches desired value. As the desired value is reached the inter event time is increased. The control retains its previous value in ETC unless an event is occurred, the state trajectory will start to deviate from desired one. Thus, control needs to be updated after a certain time aperiodically. This is evident in Figure 6. The proposed event-triggered terminal sliding mode control algorithm excludes Zeno behavior from the altitude and attitude tracking system. Furthermore, the event-triggered control algorithm updated times, compared updates required by the conventional time-triggered TSM control algorithm. Thus, the improvement in control signal calculations and updates is % from the conventional case without ETC. Therefore, in addition to ensure tracking performance, the proposed ET based TSMC significantly minimizes the quantity of data computations and transmissions. Table 3 presents a performance comparison of the ET-based implementation of the designed TSMC law against the time-triggered implementation of the adaptive SMC scheme proposed in Mofid et al.36 It is clear that the suggested method of implementing control scheme outperforms the traditional approach in terms of tracking performance and resource usage. In Mofid et al.36, linear sliding surface is considered therefore, asymptotic convergence of error dynamics is only guaranteed. Unlike Mofid et al.36, a terminal sliding surface in equation (17) is considered in our work which guarantee finite time convergence of error dynamics.
Inter event time in sec.
Comparison of adaptive TSMC36 and proposed ETC based TSMC.
This paper addresses an event based finite-time trajectory tracking problem for the QUAV system, considering model uncertainties, external disturbances, and actuator saturation. In order to ensure finite-time tracking in presence of bounded external disturbances and uncertianties, the Terminal-SMC approach is first applied to the QUAV model with actuator saturation. The implementation of an event-driven TSMC is then recommended in order to lessen the need for control command computation and communication. It is established that the devised ET based TSM control algorithm ensures finite time altitude and attitude tracking of quad rotor uav system under external disturbances and motor thrust and torque limit. Additionally, there is a significant reduction in data transmission and controller updating times, which reduces system resource usage.
Furthermore, investigating static and dynamic event-triggered based predefined-time trajectory tracking control for QUAV systems with actuator saturation presents a valuable scope for future research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Ethical considerations
Not applicable
Consent to participate
Not applicable
Consent for publication
Not applicable
ORCID iD
Arnab Basu
Data availability statement
Data sharing is not applicable to this article since no datasets were generated or analyzed in the course of this study.
References
1.
JasimANFouratiLCAlbahriOS.Evaluation of unmanned aerial vehicles for precision agriculture based on integrated fuzzy decision-making approach. IEEE Access2023; 11: 75037–75062.
2.
NairVGD’SouzaJMGuruprasadKR.Optimizing multi-agent search with non-uniform sensor effectiveness in distributed quadcopter systems. IEEE Access2024; 12: 85531–85550.
3.
WangYYanMFengG, et al. Autonomous on-demand deployment for UAV-assisted wireless networks. IEEE Trans Wireless Commun2023; 22(12): 9488–9501. DOI: 10.1109/TWC.2023.3271411.
4.
MadeboMMAbdissaCMLemmaLN, et al. Robust tracking control for quadrotor UAV with external disturbances and uncertainties using neural network-based MRAC. IEEE Access2024; 12: 36183–36201.
5.
WenGYuDZhaoY.Optimized fuzzy attitude control of quadrotor UAV using adaptive reinforcement learning strategy. IEEE Trans Aerosp Electron Syst2024; 60(5): 6075–6083.
6.
LiYCaiBSongX, et al. Modeling of maglev yaw system of wind turbines and its robust trajectory tracking control in the levitating and landing process based on NDOB. Asian J Cont2018; 21(2): 770–782.
7.
WenGHaoWFengW, et al. Optimized backstepping tracking control using reinforcement learning for quadrotor UAV system. IEEE Trans Syst Man Cybern Syst2022; 52(8): 5004–5015. DOI: 10.1109/TSMC.2021.3112688.
8.
FangQMaoPShenL, et al. A global fast terminal sliding mode control for trajectory tracking of unmanned aerial manipulation. Measur Cont2023; 56(3–4): 763–776.
9.
HuMAhnHYouK.Finite-time rapid global sliding-mode control for quadrotor trajectory tracking. IEEE Access2023; 11: 22364–22375. DOI: 10.1109/ACCESS.2023.3252539.
10.
LianSZhaoSWangY, et al. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode. IEEE Trans Ind Electron2022; 69(2): 1597–1607. DOI: 10.1109/TIE.2021.3057015.
11.
MofidOMobayenSWongW-K.Adaptive terminal sliding mode control for attitude and position tracking control of quadrotor UAVs in the existence of external disturbance. IEEE Access2021; 9: 3428–3440.
12.
MobayenSEl-SousyFFMAlattasKA, et al. Adaptive fast-reaching nonsingular terminal sliding mode tracking control for quadrotor UAVs subject to model uncertainties and external disturbances. Ain Shams Eng J2023; 14(8): 102059.
13.
YangYYanY.Attitude regulation for unmanned quadrotors using adaptive fuzzy gain-scheduling sliding mode control. Aerosp Sci Technol2016; 54: 208–217.
14.
ShaoXSunGYaoW, et al. Adaptive sliding mode control for quadrotor UAVs with input saturation. IEEE/ASME Trans Mech2022; 27(3): 1498–1509.
15.
YuXFengYManZ.Terminal sliding mode control—an overview. IEEE Open J Ind Electron Soc2021; 2: 36–52.
16.
FengYYuXManZ.Non-singular terminal sliding mode control of rigid manipulators. Automatica2002; 38(12): 2159–2167.
17.
ZhaoKXuGWuQ, et al. Robust model-free nonsingular terminal sliding mode control for PMSM demagnetization fault. IEEE Access2019; 7: 15737–15748.
ZhangJZhuDJianW, et al. Fractional order complementary non-singular terminal sliding mode control of PMSM based on neural network. Int J Automot Technol2024; 25: 213–224.
20.
HouZLuPTuZ.Nonsingular terminal sliding mode control for a quadrotor UAV with a total rotor failure. Aerosp Sci Technol2020; 98: 105716.
21.
MofidOMobayenS.Adaptive finite-time backstepping global sliding mode tracker of quad-rotor UAVs under model uncertainty, wind perturbation, and input saturation. IEEE Trans Aerosp Electron Syst2022; 58(1): 140–151.
22.
ZhaoSZhengJYiF, et al. Exponential predefined time trajectory tracking control for fixed-wing UAV with input saturation. IEEE Trans Aerosp Electron Syst2024; 60(5): 6406–6419.
23.
LiuKWangRWangX, et al. Anti-saturation adaptive finite-time neural network-based fault-tolerant tracking control for a quadrotor UAV with external disturbances. Aerosp Sci Technol2021; 115: 106790.
24.
JiangTLinDSongT.Finite-time backstepping control for quadrotors with disturbances and input constraints. IEEE Access. 2018; 6: 62037–62049.
25.
ZhuHLuJLouJ.Event-triggered impulsive control for nonlinear systems: the control packet loss case. IEEE Trans Circuits Syst II: Express Briefs2022; 69(7): 3204–3208. DOI: 10.1109/TCSII.2022.3140346.
26.
QiaoYGuoD.Event-triggered robust optimized scheme with impulse control for DFIG-based wind turbine. J Electr Eng Technol2023; 18: 3695–3708. DOI: 10.1007/s42835-023-01462-7.
27.
SaeediMZareiJSaifM, et al. Resilient event-triggered terminal sliding mode control design for a robot manipulator. IEEE Trans Autom Sci Eng2023. https://doi.org/10.1109/TASE.2023.3297119
28.
WangYDuanGLiP.Event-triggered adaptive sliding mode control of uncertain nonlinear systems based on fully actuated system approach. IEEE Trans Circuits Syst II: Express Briefs2024; 71(5): 2749–2753. DOI: 10.1109/TCSII.2024.3353316.
29.
XuL-XWangY-LWangF, et al. Event-triggered active disturbance rejection trajectory tracking control for a quadrotor unmanned aerial vehicle. Appl Math Comput2023; 449: 127967. DOI: 10.1016/j.amc.2023.127967.
30.
LiZZhaiJ.Event-triggered-based sliding mode asymptotic tracking control of robotic manipulators. IEEE Trans Circuits Syst II: Express Briefs2023; 5: 1. DOI: 10.1109/TCSII.2023.3319645.
31.
ChenPYuLZhangD.Event-triggered sliding mode control of power systems with communication delay and sensor faults. IEEE Trans Circuits Syst I Reg Pap2021; 68(2): 797–807.
32.
MustafaADharNKVermaNK.Event-triggered sliding mode control for trajectory tracking of nonlinear systems. IEEE/CAA J Autom Sin2020; 7(1): 307–314. DOI: 10.1109/JAS.2019.1911654.
33.
TabuadaP.Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans Autom Control2007; 52(9): 1680–1685.
34.
BeheraAKBandyopadhyayBCucuzzellaM, et al. A survey on event-triggered sliding mode control. IEEE J Emerg Sel Top Ind Electron2021; 2(3): 206–217. DOI: 10.1109/JESTIE.2021.3087938.
35.
LinXLiuJYuY, et al. Event-triggered reinforcement learning control for the quadrotor UAV with actuator saturation. Neurocomputing2020; 415: 135–145. DOI: 10.1016/j.neucom.2020.07.042.
36.
MofidOMobayenSWongWK.Adaptive terminal sliding mode control for attitude and position tracking control of quadrotor UAVs in the existence of external disturbance. IEEE Access2021; 9: 3428–3440. DOI: 10.1109/ACCESS.2020.3047659.
37.
GuoXGWangJLLiaoF, et al. CNN-based distributed adaptive control for vehicle-following platoon with input saturation. IEEE Trans Intell Transp Syst2018; 19(10): 3121–3132.