
Abstract
To achieve the goal of maximum power output of direct drive permanent magnet synchronous generator (PMSG), this study designs a position sensorless control strategy for wind power generation system based on composite control strategy. Firstly, a model reference adaptive state observer (MRAS) is constructed to accurately estimate the angular velocity of the wind power generation system, achieving sensorless control. In order to reduce the error of delay in velocity estimation, the MRAS with Smith predictor strategy is proposed to improve the accuracy of sensorless control. Furthermore, in order to enhance the dynamic response speed and anti-disturbance ability of PMSG, this study specially designed an improved active disturbance rejection control (IADRC) strategy for the speed loop. The controller, with its excellent wind speed tracking performance, ensures that the system can achieve maximum power output under various wind speed conditions, and an IADRC strategy of a current loop is also designed. Through simulation verification, the control strategy proposed in this study not only achieves precise tracking of rotational speed, but also demonstrates significant advantages in dynamic performance, providing strong support for the maximum power tracking operation of permanent magnet synchronous wind power generation systems.
Keywords
Introduction
With the intensification of the energy crisis, the reserves of traditional fossil fuels have significantly diminished, and pollution has become severe. More and more researchers are shifting their focus to the development of clean energy. Wind power generation has become a global energy strategy priority due to its environmental benefits and large storage capacity, and permanent magnet synchronous wind power generation systems have gained popularity.1–3 Currently, the maximum power point tracking technology for direct-drive permanent magnet synchronous generators (PMSG) has become a research hotspot, and numerous intelligent control algorithms such as PI control, sliding mode control, model predictive control, and active disturbance rejection control (ADRC) have been widely applied in PMSG systems.4–7 However, in practical application scenarios, wind turbines are prone to speed sensor failures when operating in harsh weather conditions such as rain, snow, and storms. In view of this, it is particularly necessary to conduct in-depth research on the position-sensorless control technology of wind power generation systems, which is of great significance for ensuring the stable operation of wind power generation systems and improving their overall performance.
In, 8 a principle architecture for a finite speed set model reference adaptive system (FSS-MRAS) is proposed and compared with traditional MRAS to verify the effectiveness of the proposed control strategy. In, 9 a model reference adaptive system (MRAS) for real-time estimation of PMSG rotor position angle is proposed, achieving position-free estimation. In, 10 a model reference adaptive system (SM-MRAS) speed observer incorporating improved sliding mode control is proposed, which can effectively enhance the speed observation accuracy of permanent magnet synchronous wind power generation systems. In, 11 a sensorless control scheme for permanent magnet synchronous motors is designed based on the principle of error compensation. By introducing an error compensation mechanism, the position observation deviation is corrected in real time, effectively improving the accuracy of position estimation. In, 12 a fuzzy MRAS control framework for sensorless systems of permanent magnet synchronous motors is constructed. This method replaces traditional PI controllers with fuzzy logic, achieving collaborative optimization of online parameter self-tuning and speed estimation.
It can be observed that wind power generation systems and permanent magnet synchronous motor control systems based on model reference adaptation exhibit favorable speed estimation accuracy. However, the aforementioned improvement schemes are relatively complex. Therefore, this paper incorporates a Smith predictor into the traditional model reference adaptive strategy to further enhance speed observation accuracy while simplifying model complexity.
To further improve the anti-disturbance capability and speed control accuracy of the system, researchers are currently focusing on the coordinated control of current loop and speed loop control strategies. In particular, the active disturbance rejection control (ADRC) technology, with its significant advantages of not requiring precise mathematical models and unified compensation for internal and external disturbances, has gradually become an important research direction for improving system speed regulation and disturbance rejection performance. As a new robust control framework evolved from traditional PID control theory, ADRC can be traced back to 1995 13 and is further refined in 2009. 14 The core innovations of this method lie in two aspects: first, it models the internal and external disturbances of the system as extended state variables and implements dynamic compensation through feedback mechanisms; second, it exhibits significant advantages in addressing system dynamic uncertainty, external disturbances, and nonlinear characteristics. In sharp contrast to traditional control methods, the ADRC design process does not rely on the precise mathematical model of the controlled object, effectively breaking through the strict requirements of traditional control algorithms for modeling accuracy and providing a more universal solution for the control of complex systems. The ADRC strategy can estimate disturbances including coupling in real-time through the observer and compensate for them, with fast tracking and good response, and strong adaptability to parameter changes. Even if coupling is ignored in modeling, it can still achieve precise control, ensuring system stability and small output errors. 15 In, 15 the linear active disturbance rejection control (LADRC) method based on nonlinear ADRC is proposed, which features a concise model, meets high-precision control requirements, and offers excellent response speed and system robustness. It has thus gained increasing acceptance among researchers.
In, 16 a model-compensated ADRC strategy for wind power generation systems is proposed, which further enhances the dynamic and anti-disturbance performance compared with the traditional ADRC strategy. In, 17 a composite ADRC strategy applied to wind power generation control systems is proposed, where the speed loop employs a model-based ADRC strategy and the current loop adopts a model predictive control (MPC) strategy. By compensating in real time for disturbance effects caused by parameter variations, system stability is effectively maintained. In, 18 a composite control strategy is proposed in which the speed loop uses an active disturbance rejection strategy and the current loop adopts an ADRC strategy combined with a quasi-resonant controller, effectively improving dynamic performance and suppressing harmonics. In, 19 a maximum power point tracking strategy based on MPC is proposed, which utilizes an extended state observer (ESO) to attenuate disturbances and uncertainties, further enhancing the dynamic performance of wind power control systems. In, 20 a control method for permanent magnet synchronous wind power generation systems based on output estimation is proposed, which can effectively improve system dynamic performance. The above-mentioned references have improved the dynamic performance of the system through the ADRC strategy. References16,20 only design the ADRC strategy for the speed loop; in addition, the control strategies for the current loop and position loop are not designed, which cannot meet the position sensorless control scheme. To further improve the dynamic performance of the system, it is necessary to redesign the ADRC strategy for the speed loop and, at the same time, design the control strategies for the current loop and position loop. References17–19 design composite control strategies, but their control systems are relatively complex.
Based on the above research findings, it can be observed that the ADRC strategy has been applied to permanent magnet synchronous wind power generation systems to a certain extent, but there is still room for optimization in the control performance. This paper improves the ADRC by introducing a proportional factor into the original linear ESO, thereby optimizing the speed loop and current loop control strategies.
To improve the dynamic performance of wind power generation systems, this paper proposes a composite control strategy for implementing sensorless control in such systems. Firstly, a MRAS is constructed to accurately estimate the system angular velocity. To address the MRAS estimation error caused by time delay, a Smith predictor is introduced to optimize the MRAS sensorless estimation strategy and enhance control accuracy. Furthermore, to enhance the dynamic response and disturbance rejection capability of the PMSG, a dual improved active disturbance rejection control (IADRC) is designed for speed loop and current loop, which enables more accurate rotational speed estimation.
Wind power generation system model
Wind turbine model
The mechanical power Pie captured by the wind turbine from the wind is18–20:

where ρ is the air density, measured in kg·m−3;
The expression for mechanical torque Tm is:


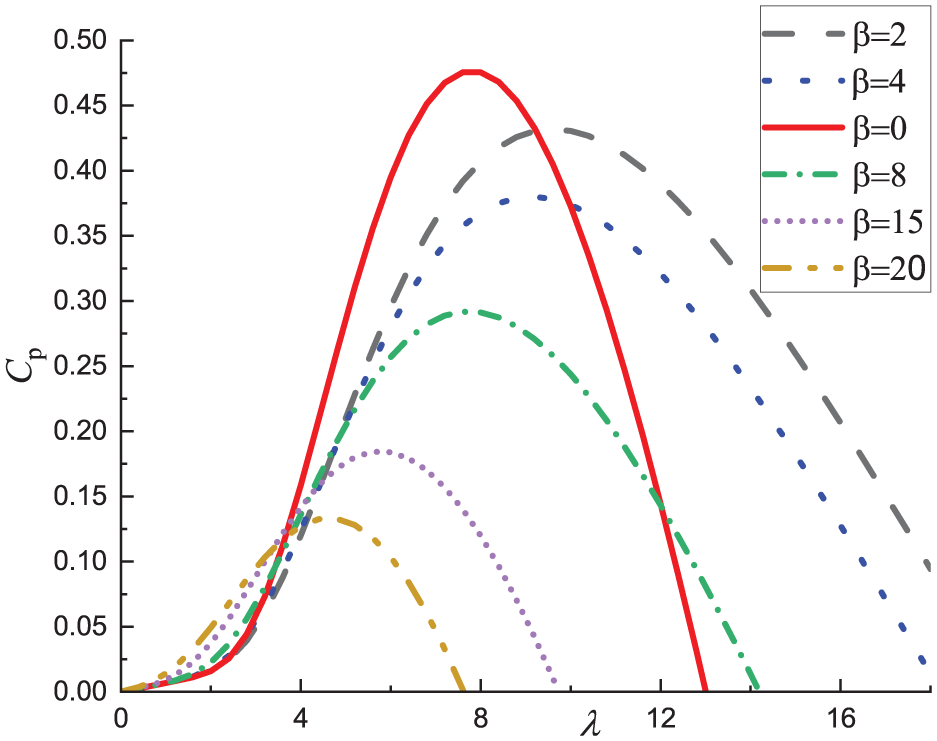
where
From equations (1)–(3), it can be inferred that Cp reaches its maximum value of 0.475 when specific condition (
PMSG model
The mechanical dynamic process of the PMSG is represented as:

where
The current equation of the PMSG is a differential equation with variable coefficients, which is difficult to solve directly. Therefore, this paper adopts the two-phase rotating d-q axis coordinate system for simplified solution. In this coordinate system, the d-axis is in the same direction as the rotor flux axis, and the q-axis is 90° ahead of the d-axis in the counterclockwise direction. In the d-q rotating coordinate system, the torque equation of the permanent magnet synchronous wind turbine with

where p is the number of motor poles,
Composite control strategies
Design of IADRC of speed loop
In order to suppress system disturbance and accelerate the dynamic response of the system, the speed loop is controlled by a first-order ADRC, whose equation can be expressed as:

where

where

The linear expansion state observer (ESO) model of the PMSG is designed as follows:

where
To further enhance the system’s dynamic performance, this paper incorporates a proportional element in estimating the total disturbance of the system, thereby improving the observation accuracy.
Therefore, the improved ESO model designed is:

where k12 is the scaling factor.
In order to reduce estimation disturbance and estimate and compensate for the moment of inertia in real-time, the formula can be expressed as follows 21 :
where
Design of IADRC of current loop
The ESO of the d-axis current can be designed based on 18 :

where
The d-axis current control law can be designed as follows:

where
The improved ESO model by adding a proportional element can be designed as:

where kv1 is the scaling factor.
The design process of the q-axis current is the same as that of the d-axis, so it will not be repeated here.
Establishment of MRAS based on Smith predictor
The current equation of PMSG explicitly includes the key parameter of electrical angular velocity
The PMSG model in a rotating coordinate system can be represented as:
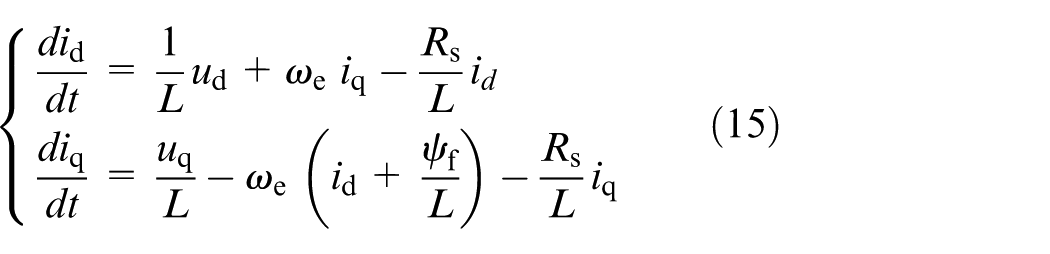
where
Equation (15) can be further expressed as:

The adaptive law for speed estimation of PMSG at this time is:

In the traditional MRAS, PI feedback control is commonly used to adjust adjustable parameters, but this can lead to system phase lag. To improve the system’s control performance, this paper proposes a MRAS based on the Smith predictor. The Smith predictor can counteract the delay of the controlled object through model transformation, allowing the system to process in a conventional manner and thereby improving response speed and input signal tracking capability.
The differential equation of the velocity loop can be derived from equation (4), which can be expression as:

Let

Finally sorted out:

If we only focus on the transmission relationship from

In this design, there is a certain delay τ in the signal transmission and speed observation process. For linear time-invariant systems, the actual frequency-domain model for speed estimation considering time delay is:

where GSV2(s) represents the transfer function of the control object including the delay element; GSV1(s) represents the transfer function of the controlled object without considering the influence of time delay;
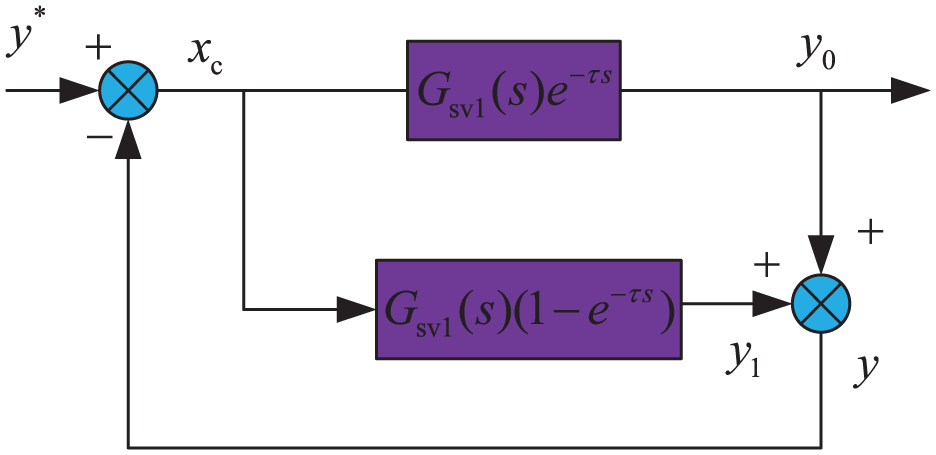
Structure diagram of Smith predictor.
To counteract the impact of latency, object
It can be seen that the transfer function between the control outputs xc and y0 does not include a delay component. When the delay constant is sufficiently small, equation (23) can be rewritten as:
Equation (24) indicates that the equivalent process variable y is composed of two parts: the actual output y0 of the system plus its time constant and the derivative of the output

Through frequency domain transformation, it can obtain:

Figure 3 is the composite control block diagram of position sensorless strategy for wind power generation system. Firstly, the rotational speed is estimated using the MRAS with a Smith predictor, and based on this, the IADRC strategies for both the speed loop and current loop controllers are designed to form the overall control strategy. When adjusting the IADRC control parameters, this paper follows the sequence of first tuning the IADRC of current loop, then the IADRC of speed loop.
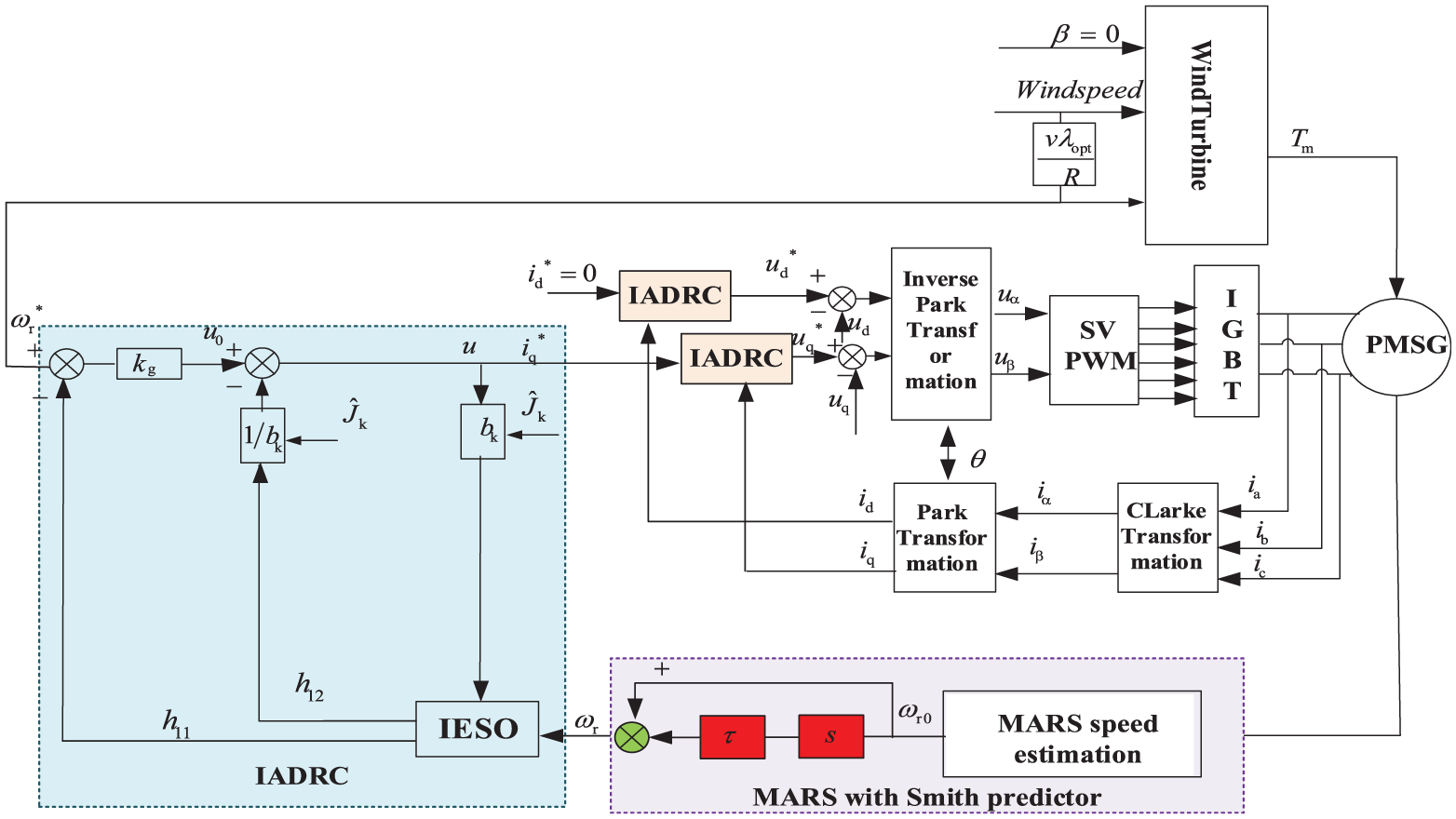
The composite control block diagram of position sensorless strategy for wind power generation system.
First, fix the speed loop (using a PI strategy temporarily) and focus on tuning the IADRC of current loop. Once the optimal control effect is achieved for the IADRC parameters of current loop, proceed to tune the IADRC parameters of speed loop.
Taking the d-axis current loop tuning as an example, the IADRC tuning process is as follows:
Tuning steps: First, initially determine the value of
Simulation results and analysis
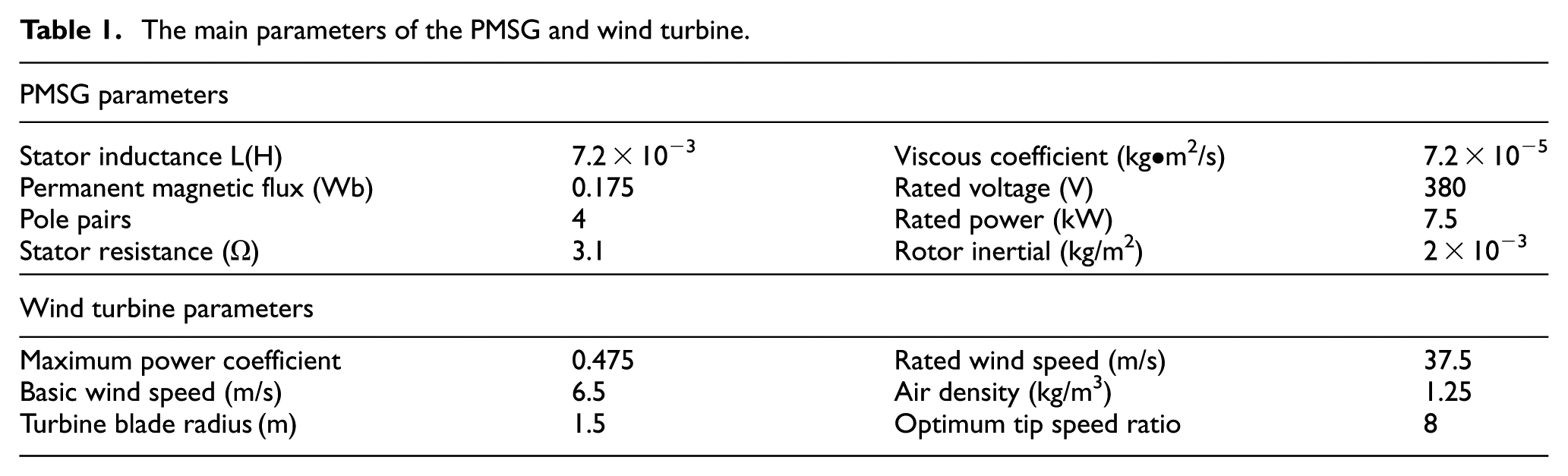
To verify the effectiveness and reliability of the proposed composite control strategy, a composite control strategy model is built in the MATLAB/Simulink environment as shown in Figure 3. Simulations are conducted to evaluate the control performance of the proposed composite controller and the traditional controller under constant wind, gradual wind, random wind, and gust wind. Comparisons are made between the PI control strategy, the ADRC strategy, and the proposed composite strategy in this paper. Specifically, the PI control strategy adopts the traditional MRAS strategy for position estimation, the PI controller scheme for speed and current loops, the ADRC strategy adopts the traditional MRAS strategy for position estimation, and the ADRC strategy for speed and current loops. The proposed composite control strategy adopts the output estimated MRAS strategy for position estimation, and the IADRC strategy for speed and current loops. Finally, a comparison is made through simulation, and the results are discussed and analyzed. Table 1 shows the simulation parameters of the PMSG and wind turbines.
The main parameters of the PMSG and wind turbine.
Comparison of speed tracking for different wind speed control strategies
For the convenience of comparison, this paper compares the proposed composite strategy with the PI controller scheme and the ADRC strategy. The simulation diagrams of the comparison are shown in Figures 4 to 10. According to the equation
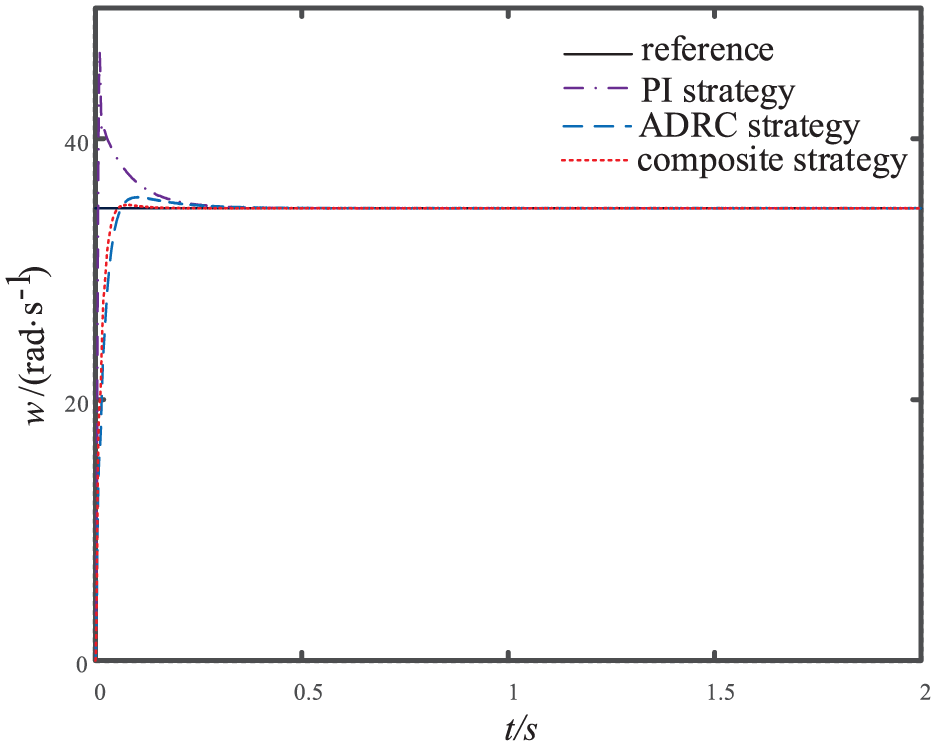
Speed tracking curves of three control strategies under constant wind conditions.
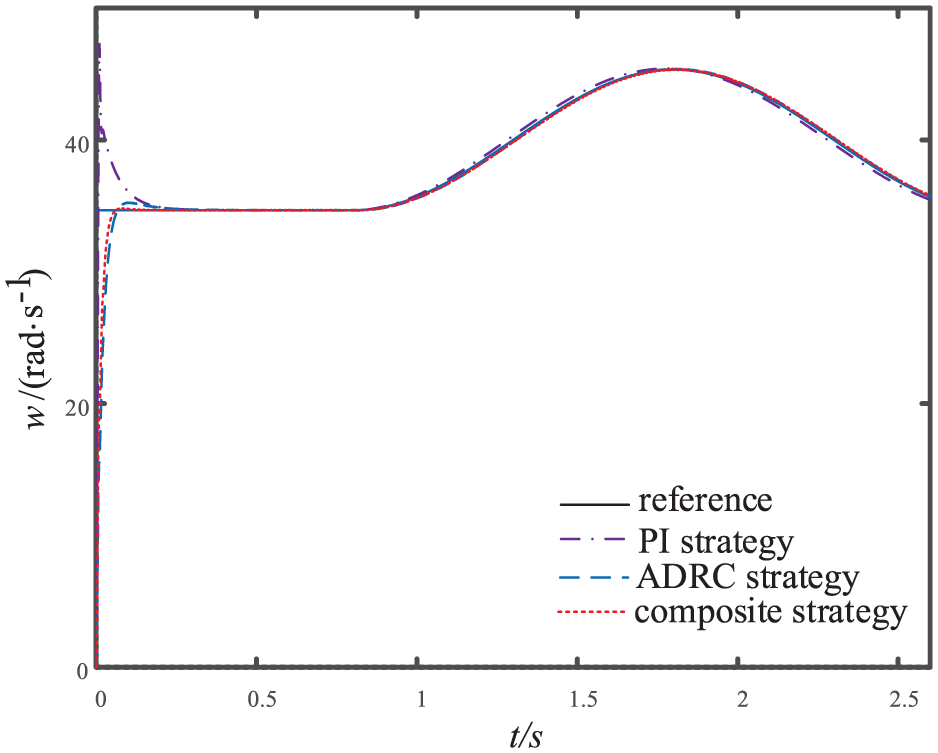
Speed tracking curves of three control strategies under gradual wind conditions.
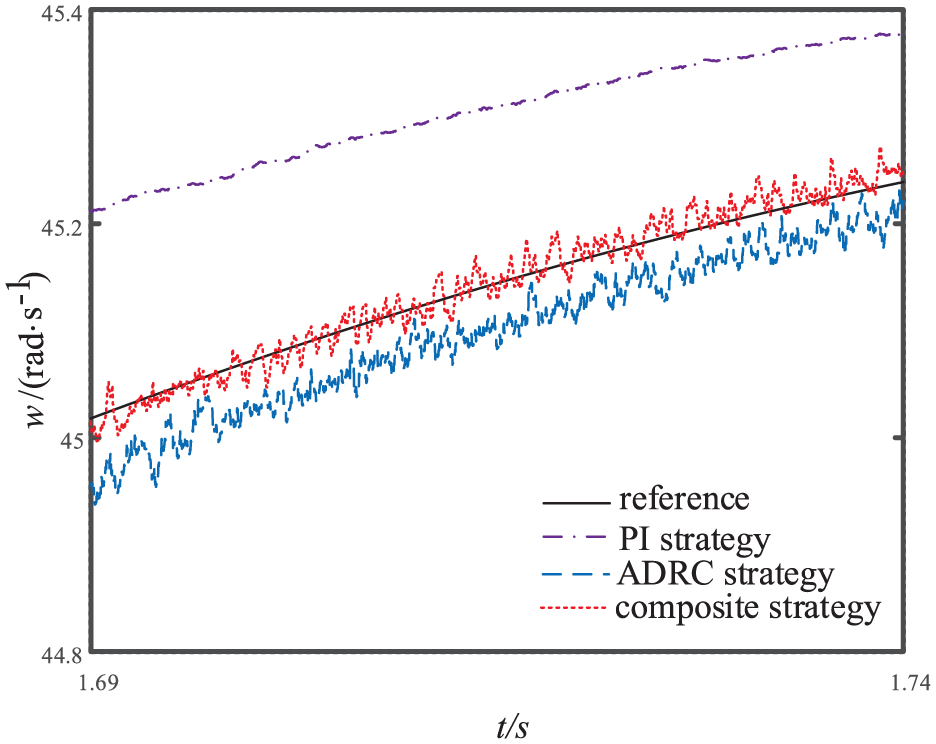
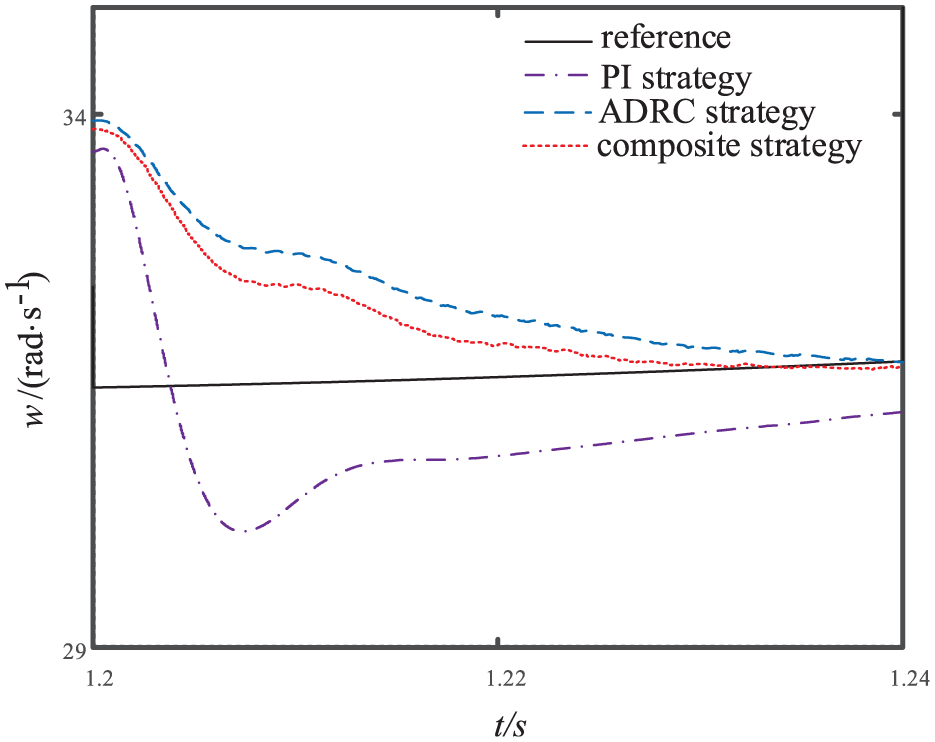
Enlarged view of speed tracking curves for three control strategies under gradually changing wind conditions.
Speed tracking curves of three control strategies under random wind conditions.
Enlarged plot of speed tracking curves for three control strategies under random wind conditions.
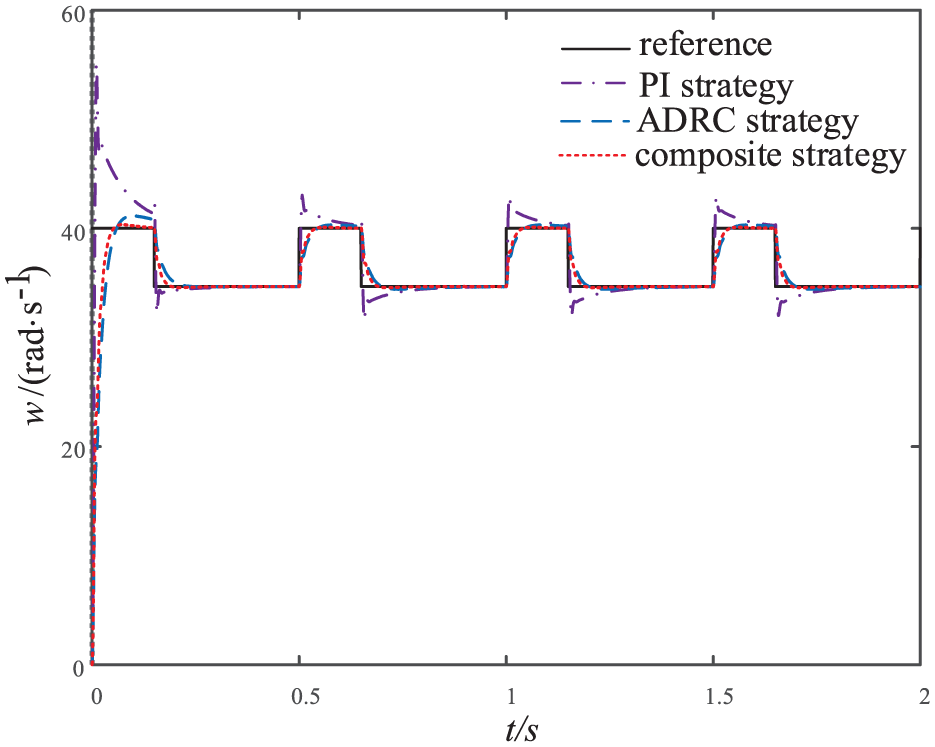
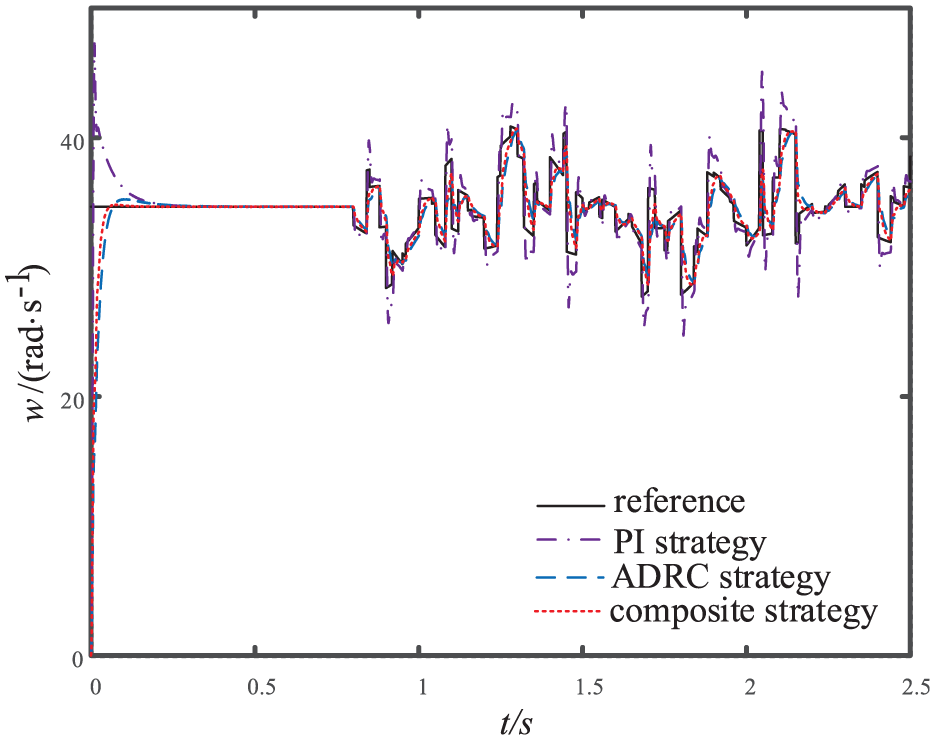
Speed tracking curves of three control strategies under gust wind conditions.
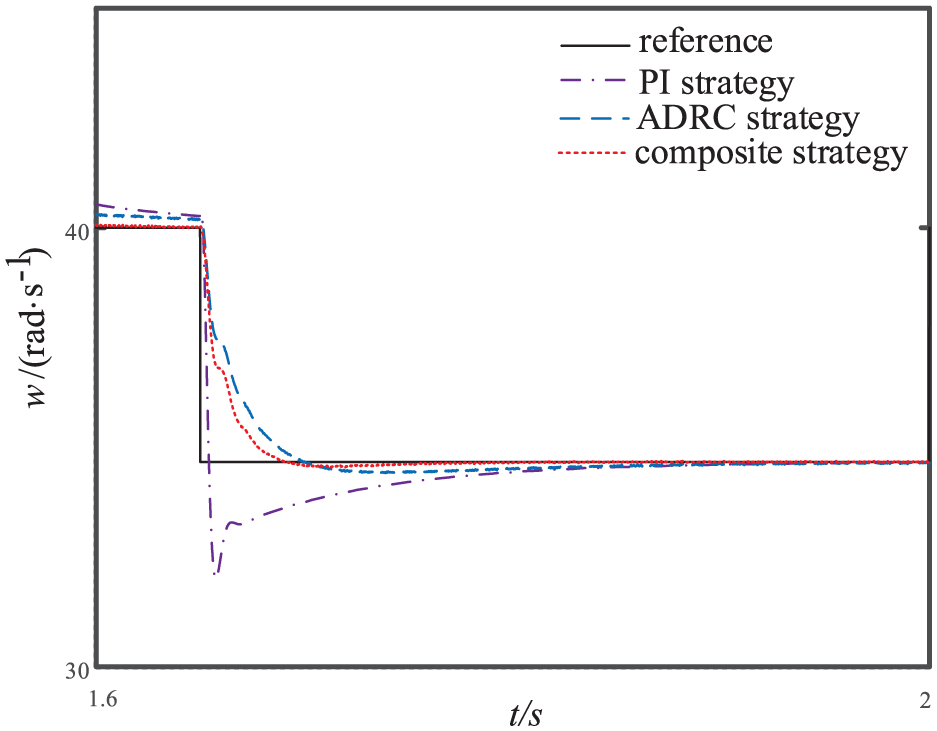
Enlarged view of three control strategies under gust wind conditions.
Simulation result analysis
In order to verify the correctness of the position sensorless control strategy of the wind power generation system with the composite control strategy designed in this paper, Figures 4 to 10 show the comparison of speed tracking curves under four different wind conditions. From Figure 4, it can be observed that when the wind speed remains constant, the composite control strategy can better estimate the speed compared to the traditional control strategy and ADRC strategy. From Figures 5 and 6, it can be observed that compared with the traditional control strategy and ADRC strategy, the composite control strategy can quickly estimate the speed during the gradual wind changes and has better dynamic performance. Among them, the ADRC strategy has slightly worse performance than the composite control strategy, while the PI control strategy has the worst performance. From Figures 7 and 8, it can be observed that compared to the traditional control strategy and ADRC strategy, the composite control strategy can quickly estimate the speed during the random wind and has better dynamic performance. Among them, the ADRC strategy has slightly worse performance than the composite control strategy, while the PI control strategy has the worst performance. From Figures 9 and 10, it can be observed that under the gust wind, the composite control strategy performs the best, followed by ADRC, while the PI strategy performs the worst.
Conclusion
This paper proposes a composite control method for achieving sensorless control of wind power generation systems. Firstly, the position loop optimizes the sensorless estimation strategy of MRAS by using a Smith predictor, thereby improving control accuracy. A dual IADRC with the speed loop and current loop are designed to more accurately estimate the rotational speed. By comparing the simulation results, it can be concluded that the proposed composite control strategy has better position estimation accuracy and superior dynamic performance. This paper primarily relies on simulation verification and lacks experimental validation. Future work will further test the effectiveness of the proposed control strategy through experiments. In the later stage, we will further research the tracking performance of ADRC in wind power generation systems.
Footnotes
Ethical considerations
Ethical approval is not applicable to this study as it did not involve human or animal subjects.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
The authors confirm contribution as follows: study conception and design: Jian Sun, Yueping Mo; data collection: Jian Sun; analysis and interpretation of results: Jian Sun, Yueping Mo; draft manuscript: Jian Sun.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by fund from Phase achievements of the “Mechatronics Technology Professional Cluster” under the Second Batch of High-Level Professional Clusters in Jiangsu Higher Vocational Education; Jianghai Polytechnic college’s “Qinglan Project Mid-Career Academic Leaders Training Program (2024).”
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.