
Abstract
This article proposes an active disturbance rejection controller design scheme to stabilize the unstable limit cycle of a compass-like biped robot. The idea of transverse coordinate transformation is applied to form the control system based on angular momentum. With the linearization approximation, the limit cycle stabilization problem is simplified into the stabilization of an linear time-invariant system, which is known as transverse coordinate control. In order to solve the problem of poor adaptability caused by linearization approximation, we design an active disturbance rejection controller in the form of a serial system. With the active disturbance rejection controller, the system error can be estimated by extended state observer and compensated by nonlinear state error feedback, and the unstable limit cycle can be stabilized. The numerical simulations show that the control law enhances the performance of transverse coordinate control.
Introduction
Compared with wheeled robots, biped robots have born adaptation for complex environment. The development of biped robot starts from full-actuated biped robot, which is well developed up to now. However, a big challenge still remains within the development of full-actuated robots, which is that the efficiency is low and they would consume excessive energy compared with human beings. Taking the famous full-actuated robot ASIMO 1 as an example, the energy consumption is nearly 20 times of a normal human. 2 Moreover, QRIO 3 and HUBO 4 are also troubled by the same problem. As a consequence, the efficiency problem restricts the application of full-actuated robots.
To solve the efficiency issue for biped robot walking, much improvement has been designed by researchers since McGeer 5 who raised the concept of passive walking. He discovered that a biped machine could walk downhill with no torque input, and its walking style was similar to a normal human’s. Inspired by the idea of passive walking, researchers focused on designing prototypes and walking gaits to achieve efficient walking. To be specific, various other methods have been proposed to regulate full-actuated robots’ walking gaits, 6 –10 while several passivity-based control methods have been designed to stabilize the unstable walking gaits. 11,12 However, since the full-actuated biped robots mentioned above are equipped with flat feet and foot rotation is forbidden, the application of robot dynamics is limited and the efficiency is still not high enough. To improve the walking efficiency, underactuated walking robots and corresponding control methods have been proposed. Grizzle et al. 13 developed the Poincaré map for systems with impulse effects, with which the stability of the walking gait for robots with point feet could be checked. Westervelt et al. 14 proposed the method of hybrid zero dynamic to generate efficient walking gaits, which was a commonly used method since it was adjustable for different underactuated robots. Hu et al. 15 designed a control scheme with time scaling control method and the control symmetries method to make robots with point feet to walk on different slopes. To stabilize the unstable limit cycles of underactuated walking robots, event-based control and transverse linearization were proposed. 16 –19 The method of transverse coordinate control was proposed to improve underactuated robots’ stability firstly by Yan et al. 20 In summary, through 20 years of development, theoretically, underactuated robots’ efficiency is more advanced than full-actuated robots and underactuated robots have attracted most of attention among current researchers.
Although underactuated robots have the advantage of high efficiency, underactuation makes them harder to control. The control strategies mentioned above achieve stabilization of underactuated robots, but the ability to reject external disturbances is still poor. Taking the work of Yan et al. 20 as an example, which is also the control method to be improved in our study. It could be seen in their research that they combined transverse coordinate transformation with linearization approximation. However, the linearization approximation method causes inevitable errors in the system and hence only takes effect when the states are so close to the limit cycle. Although the transverse coordinate controller could successfully improve robots stability, it could only function well in limited circumstances. Therefore, there is an urgent need for an effective tool to further enhance the ability of rejecting disturbance.
This article proposes to solve transverse coordinate controller’s drawback of the limitation by introducing active disturbance rejection controller (ADRC) into the design of underactuated robots. ADRC is a control method to measure and compensate the system disturbance to improve the robustness of the system, which was firstly proposed by Han. 21,22 Typical ADRC includes extended state observer (ESO), transient process, and nonlinear state error feedback (NLSEF). Specifically, ESO is used to estimate the state of the system and the disturbance inside and outside. Transient process is designed to soften the target curve when it changes drastically. NLSEF aims at fast following and shock restraining, which has better performance in terms of rejecting disturbance compared with linear feedback. Based on the combination of these three tools, ADRC could have good robustness and hence could be widely applied in many fields including robot control field. There have been some achievements about the control of single robot joint or leg. 23 –25 For the walking control of biped robot, Arcos-Legarda et al. 26 and Martínez-Fonseca et al. 27 have proposed an ADRC design method to stabilize the walking gait. In their work, external perturbations and model uncertainties are lumped as total disturbance and estimated by an extended observer. Furthermore, the system could be stabilized by the feedback controller. Based on their design method, this article proposes an ADRC design scheme by combining the idea of transverse coordinate control, in which the system to be controlled is based on the angular momentum of the biped rather than the angles of the joints.
In terms of the specific work of this article, we select compass-like biped robot as the research object. The reason we choose it is that it is simple and tractable, which enables us to systematically investigate the dynamic behavior control. We shall now sequentially state the process of our research. Firstly, we propose the dynamic model of the compass-like biped robot. Secondly, we search the limit cycle of this biped robot in an event-based control way. Through theoretical analysis and simulation, it is proved that the limit cycle is unstable. Thirdly, to stabilize the unstable limit circle, we plan to design an ADRC controller for the robot. For the purpose of applying the ADRC controller on this robot, we transform the robot system into a serial system of angular momentum with the method of transverse coordinate transformation. Specifically, in terms of how we design ADRC, ESO is used to track the state variables and to estimate the value of the system error, which will be compensated by the feedback controller. With the help of transient process, the tracking transient will be smooth even in the case where the tracking error is huge after collisions in the walking gaits. The NLSEF is designed after we have got the estimation of state variables and the transient process. Therefore, the final value which will be inputted into the robot walking model can be compensated with the estimated system error, which combines the model error and the external disturbance. Finally, it is verified that the characteristic root of Poincaré map of the system controller by ADRC is within the unit circle, which is to say that ADRC controller has the ability to stabilize the unstable limit cycle. By comparing with the method of transverse coordinate control in simulation, ADRC has superiority in robustness and convergence speed.
The key technical contributions made in this study can be summarized as follows. Firstly, we propose ADRC into the field of biped robot walking control based on the method of transverse coordinate control. This article focuses on the controller design problem of biped robot walking. Since the biped walking system does not directly meet the form requirements of ADRC, the main contribution of this article is to propose a transformation approach with which ADRC could be applied to biped walking control. To be specific, the transformation approach is transverse coordinate transformation, and it transforms the dynamic system with angles as state variables into a system with angular momentums as state variables, with which the problem is transformed to an angular momentum system stabilization problem with disturbance. We design an ADRC controller in the form of a serial system to stabilize the unstable limit cycle and to improve the performance of transverse coordinate control. Secondly, the proposed control scheme in this article can be applied to all biped walking stabilization problem with underactuation degree one, which is of great significance.
The remainder of this article is organized as follows. The dynamic model of the biped robot is given in the section “Dynamic model of robot.” The section “Limit cycle of walking gait” presents a limit cycle and analyzes the stability of it. In the section “Design of ADRC,” an ADRC controller is designed to stabilize the limit cycle. The numerical results are shown in the section “Simulation.” Finally, the last section concludes this article.
Dynamic model of robot
The biped model we discussed in this article is the compass-like biped robot.
As shown in Figure 1,

Compass-like biped robot model.
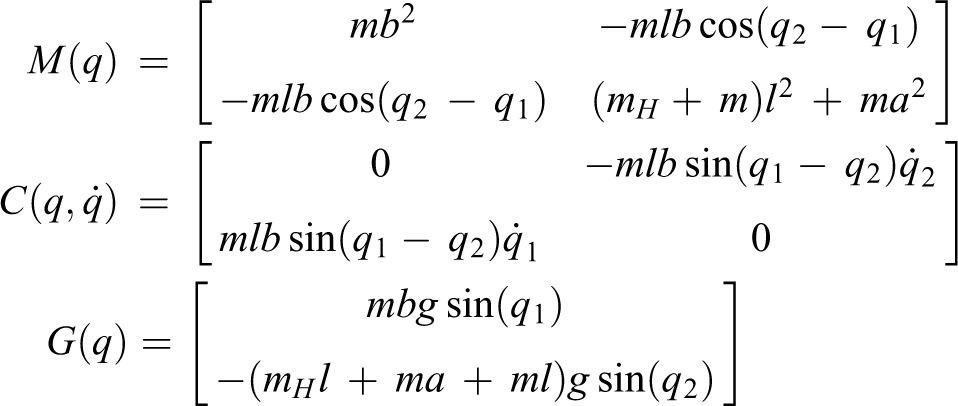
The model is designed in the form of Lagrange equation of motion 28 as follows

where
The collision model of the swing foot touching the ground is

where

and

where F is the force at the toe of the swing leg. The matrix

Limit cycle of walking gait
With the dynamic model in the last section, we search the limit cycle in an event-based control way that in each step of walking, the value of control which is inputted to the hip joint is constant and is changed at the beginning of each step, that is,
Taking the case of

The unstable limit cycle when

The Jacobian matrix is
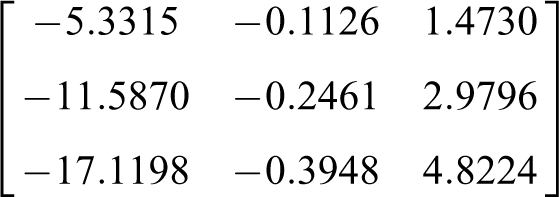
and the eigenvalues are

The phenomenon that the unstable limit cycle converges to a two-step limit cycle with open-loop control.
In the next section, we will design a controller to keep the robot walking in the unstable limit cycle.
Design of ADRC
In this section, we first propose the form of transverse coordinate transformation of the compass-like biped robot. Furthermore, we analyze the structure of the transformed system. Finally, ESO, NLSEF, and transient process are designed, respectively.
The form of transverse coordinate transformation
In the swing phase, the angular momentum about the stance point is
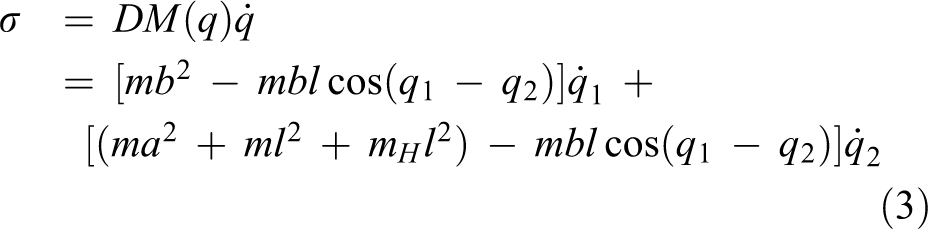
where

Let τ be a virtual time of the target limit cycle,

where
Analysis of system structure
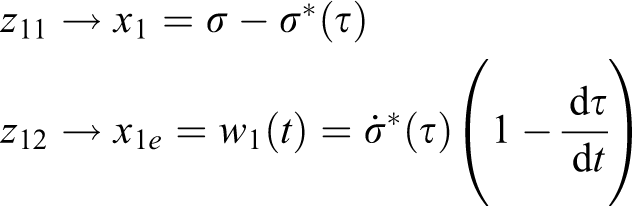
After the introduction of the transverse coordinate transformation, we construct a transformed system in the moving Poincaré section as
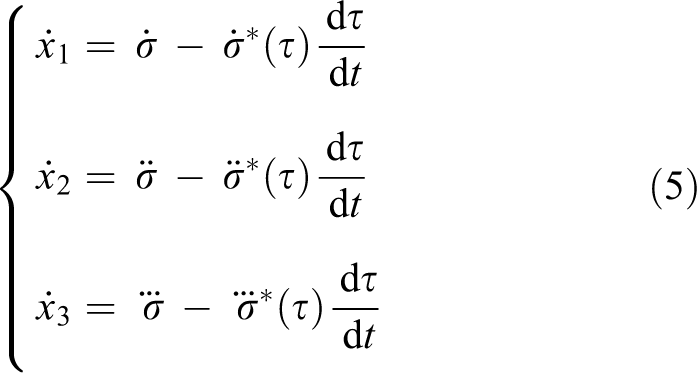
Since the reference point is chosen from the Poincaré section, it is necessary to point out that the values of

When the states of the biped are in the limit cycle,
For the dynamic of the state x1

we design

If the nonlinear term

The system (8) becomes a linear system

For such a system, it is easy to design the controller u10 to make the error system converge to the fixed point
As x2 is designed as the virtual input of system (7), the control target of x2 is

For the dynamic of the state x2

we design

If the nonlinear term

The system (11) becomes a linear system

As x3 is designed as the virtual input of system (10), the control target of x3 is

For the dynamic of the state x3

we design

If the nonlinear term

The system (14) becomes a linear system which can be controlled easily

It has been illustrated in this subsection that the control structure of the system is a serial structure of three feedback controllers. Each controller needs to get the precise estimate of the nonlinear terms
Design of ESO and NLSEF
In this subsection, we design ESO to estimate the values of
For the system (8), suppose we can obtain the value of x1 accurately. We extend the nonlinear term

The ESO of the new system is designed as
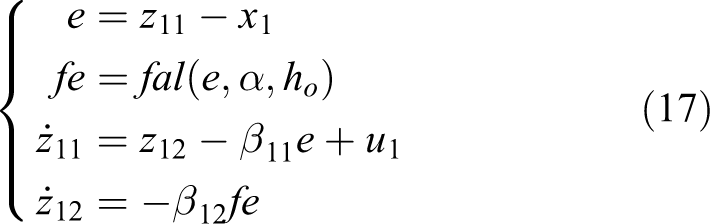
where
and ho, α, β11, and β12 are parameters related to the performance of the ESO.
30
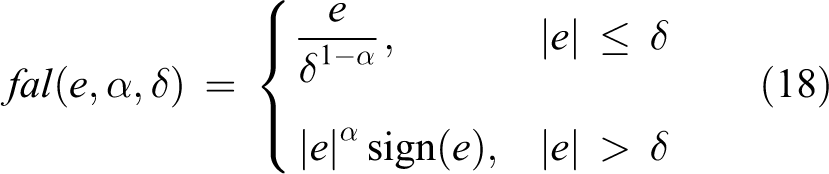
The nonlinear function
The state observer can estimate the states of the system (16) accurately if appropriate parameters β11 and β12 are chosen. The details are shown as
With the value of z12, the disturbance of the system (7) can be compensated and the NLSEF can be designed as

where v1 is the control target of x1 and
For the system (11), the control target of x2 is u1 in equation (19). Suppose we can obtain the value of x2 accurately and use the ESO to estimate the value of
We expand the nonlinear term

The ESO of the new system is designed as

where the function of

With the value of

For the system (14), the control target of x3 is u2 in equation (22). Suppose we can obtain the value of x3 accurately and use the ESO to estimate the value of

The ESO of the new system is designed as

where the function of

With the value of

Design of transient process
However, the design of ADRC that merely containing ESO and NLSEF will lead to great fluctuation, recovering, and excessively large output of the controller. Since there is a collision when the swing foot touches down, the biped walking system is a hybrid system which further causes the states variables of the ESO to be impacted. Therefore, we introduce the transient process to solve this problem.
The transient process is designed as

where v is the target value of x1. Parameter r is used to adjust the speed of transition
31
and ht is used to adjust the linear part of
The transient process can achieve the smooth transition and avoid the excessively large input value for the reason that it can change the reference value from fixed value to a dynamic process.
Summary
In summary, the structure of the serial system which constitutes ESO, transient process, and NLSEF is described in Figure 4, and the three-loop serial system with ADRC is demonstrated below

The structural diagram of serial system ADRC. ADRC: active disturbance rejection controller.

So far we have designed the feedback controller u3. The value of

Then, the input of the hip can be calculated as

where
Simulation
The specific parameters of the ADRC controller we designed are shown in Table 1. In terms of the parameters selection criteria, we will next give some experience. For the parameters ho, hu, and ht, they set a small neighborhood around zero in function
The parameters of the designed ADRC controller.

ADRC: active disturbance rejection controller; ESO: extended state observer; NLSEF: nonlinear state error feedback.
To verify the effectiveness of the controller, we adopt the same stability analysis method as the “Limit cycle of walking gait” section. The Jacobian matrix of Poincaré return map with the ADRC controller is calculated below. By taking the same fixed point as equation (2), the Jacobian matrix is

The eigenvalues are
Starting from the states that diverge from the limit cycle, the walking gait converges to the limit cycle with the controller ADRC as shown in Figure 5.

The ADRC controller can stabilize the unstable limit cycle in Figure 3. Starting from the states that diverge from the limit cycle, the walking gait converges to the target limit cycle. ADRC: active disturbance rejection controller.
To further illustrate the controller’s performance, the states of the ESO are shown in Figure 6. The tracking errors

The states of ESO z11, z21, and z31 can track the state variables x1, x2, and x3 fast and accurately. ESO: extended state observer.
The states z12, z22, and z32, which are used to track the nonlinear terms

The nonlinear terms

With the ADRC controller, the states x1, x2, and x3 converge to the targets v1, u1, and u2, respectively. ADRC: active disturbance rejection controller.
Next, to illustrate the advancement of the controller in biped walking, we compare the converge speed of ADRC and the transverse coordinate control. We define

With the same initial state and the different control methods, the state error
Conclusion
In this article, we propose an ADRC design scheme for compass-like robot walking. Firstly, we introduce the dynamic model of the biped robot to be controlled. Secondly, we find that the limit circle of the biped robot is unstable by searching it in an event-based control way. Thirdly, to stabilize this unstable limit circle, we design an ADRC controller which constitutes ESO, NLSEF, and transient process. Finally, the validity of the control strategy is illustrated by a series of numerical simulations.
For the future work, we will try to explore the theory in two aspects. Firstly, we will apply the control method to more robot models with more degrees of freedom, and then try to apply it in the three-dimensional field. Secondly, we will design a prototype of the compasses biped robot studied in this article and verify the theory through experiments.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.