
Abstract
In order to obtain the best power in the wind energy conversion system (WECS) of the direct-driven surface-mounted permanent magnet synchronous generator (SPMSG), active disturbance rejection control (ADRC) is introduced to track the motor speed in real time. The control algorithm provides a new design concept and an inherent robust controller component that requires very little system information. Aiming at the problem of system parameter mutation caused by internal factors and external environment changes, an adaptive controller with multi parameter identification is designed, and the disturbance caused by parameter changes is compensated in real time. The model predictive current control (MPC) technology for the sudden change of external environment is designed to accelerate the response speed of the current loop, so as to weaken the estimation of the current disturbance by the active disturbance rejection controller, and make the speed estimation more accurate. Simulation results show that the proposed control strategy is effective and satisfactory.
Keywords
Introduction
With the increasingly prominent problems of environmental pollution and energy crisis, the new energy industry has developed rapidly. In recent years, wind power generation as a new energy development technology has received more and more attention. At present, the research of wind power generation mainly focuses on variable pitch control technology and maximum wind power control scheme. Wind turbine with variable speed is the most widely used power generation equipment in the wind power industry. To get the maximum output power, the speed of variable-speed wind turbine also need to be adjusted in real time with the change of external wind speed. In fact, controlling a variable-speed wind turbine below its rated wind speed can be equivalent to controlling the generator’s speed. 1
This paper mainly discusses the maximum tracking scheme of direct-drive wind power generation system under rated wind speed. According to the best tip speed ratio, the generator speed can be adjusted in real time to keep the wind speed at the optimum blade and ensure that the output power of the generation system is always at its maximum. However, due to the randomness of wind speed and direction, the nonlinearity of generators and wind turbines, the time-varying of the internal parameters of the system, and the influence of sudden changes in the external environment, the wind power generation system has actually become a large and complex nonlinear system with disturbance, multi variable and strong coupling. Therefore, it is very challenging to study the control strategy of wind power generation system. Nowadays, with the development of intelligent control technology, more and more researchers have applied it to wind power generation system. 2
The wind power industry is rapidly developing and increasingly put into use, which puts forward higher requirements for power quality, cost, efficiency, safety and reliability. In recent years, more and more attention has been paid to the study of wind turbine control methods, including classical control methods (typical methods in practice) and advanced control methods. In Du et al., 3 a controller to adjust the speed of wind power generation system is designed by combining fuzzy neural network with particle swarm optimization algorithm. For uncertain parameters, the system stability is guaranteed and the expected performance level is achieved. A novel side panel control bottom on permanent magnet synchronous motor (PMSM) direct torque control and grid-connected variable speed motor is proposed. 4 Simulation results show that this method can provide an optimal control scheme for wind energy control system based on permanent magnet synchronous generator. In Huang et al., 5 the nonlinear time-varying evolutionary particle swarm optimization algorithm as the training stage of radial basis function neural network (RBFNN) is adopted to optimize the timing prediction parameters of various electrical models.
Active disturbance rejection control (ADRC) is a new robust control design idea based on the traditional PID control algorithm, which was first proposed in 1995 6 and elaborated in 2009. 7 It has also shown encouraging strength in managing dynamic uncertainties, disturbances and nonlinearities. In this proposal, the external disturbance and internal dynamic uncertainties are regarded as the new states of the system and the dynamic compensation is realized by the feedback controller. In addition, the design of ADRC controller does not require a detailed mathematical model, which is necessary for most classical and modern design methods. In Gao et al., 8 a linear active disturbance. It inherits the essence of the traditional nonlinear self-disturbance and has more advantages. Nowadays, it has been widely used in various fields of society.9–12
But LADRC also has some limitations, especially in the case of rapid parameter change or large external random disturbance, it cannot accurately estimate the unknown disturbance. Therefore, the control performance of ADRC may be reduced.13,14 In this case, LADRC should seek some help.
Such challenges can be mitigated by making full use of the model information in the design of ADRC. 15 The model information obtained via physical laws and system identification, can relieve the load of extended state observer (ESO) and improve the control performance of the whole system. Based on this principle, we design an adaptive controller with multi-parameter identification, which can solve the problem of system parameter mutation caused by internal factors and external environment changes, and compensate the disturbance caused by parameter changes in real time.
In the current control scheme, MPC is an optimal control method. It uses the dynamic model of the object to predict the future behavior of the object, and determine the future control behavior according to the optimization of the running cost function at each sampling time. Compared with traditional current PI, model predictive current control has faster dynamic response speed and higher steady-state accuracy.16,17 Due to the advantages of current predictive control, the control of PMSM based on current predictive control is gradually increasing. The time delay compensation scheme of current predictive control is proposed in literature, 18 which can reduce the oscillation of the current prediction control, improve the current control accuracy and reduce the harmonic content. In Wang et al., 19 according to the frequency spectrum of load current, the loss function of the algorithm is modified to the discrete transfer function to realize the suppression of current harmonics. We can find out the current predictive control algorithm is not only helpful to improve the response speed of the current, but also to reduce the current harmonics and improve the current control accuracy.20–24 In this paper, the current predictive control is used to replace the traditional PI control, so as to accelerate the response speed of the current and weaken the estimation of the current disturbance by the active disturbance rejection controller, make the speed estimation more accurate. Therefore, this paper designs the current predictive control strategy to meet the situation of sudden change of external environment.
Finally, the simulation experiment is given. The simulation results show that the compound controller designed in this paper improves the system control performance to a certain extent.
Wind energy conversion system modeling
Wind turbine system
The wind impeller absorbs the mechanical energy converted from wind energy which is stated in Betz’s Theory 25 :

The mechanical torque

where ρ is the air density (typically 1.25 kg/m3), R is the blade radius (m),
The tip-speed ratio

where ω is the angular velocity of the wind turbine (rad·s−1),

where

Figure 1 shows characteristic curve of wind energy utilization coefficient. As shown in Figure 1, for a specific angle pitch, it always exits a maximum power utilization factor, where the tip speed ratio is called the optimal tip speed ratio. The decrease of the pitch angle leads to the increase of the maximum value of power utilization factors. When
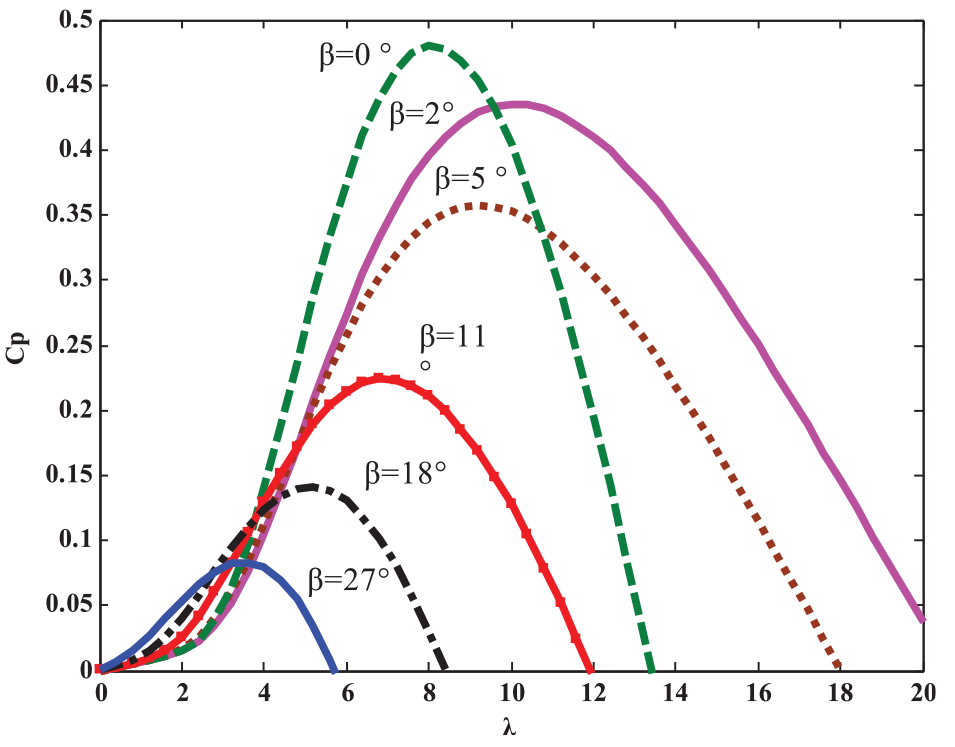
Characteristic curve of wind energy utilization coefficient.
SPMSG modeling
According to the basic principle of the vector control technology of magnetic field orientation, the dynamic equations of a three-phase SPMSG are shown in the rotating d-q reference frame as 26 :

where
The electromagnetic torque in the d-q reference frame is given as 27 :

where
Under generator operation, the mechanical equation is represented as 28 :

where
Control scheme
Design of SPMSG’s ESO
The speed loop of SPMSG system could be generalized as follows2,29:

Where
Let

The parameter

Equation (12) can be expressed as following state space model:
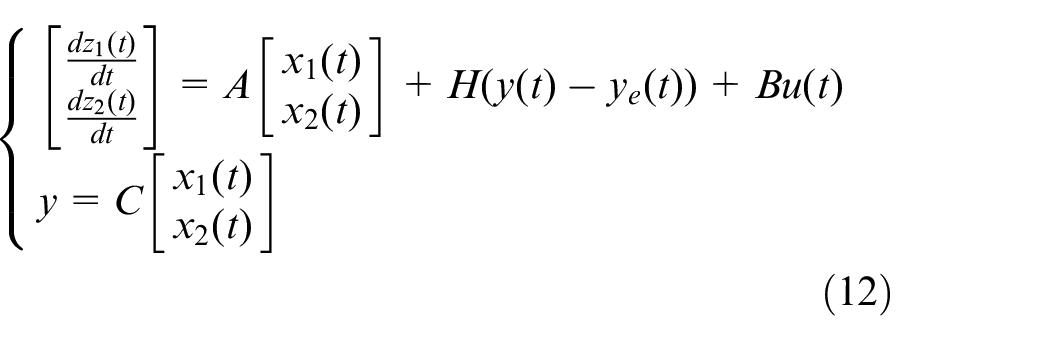
where the state matrix
So, characteristic equation of equation (12) can be expressed as follow:
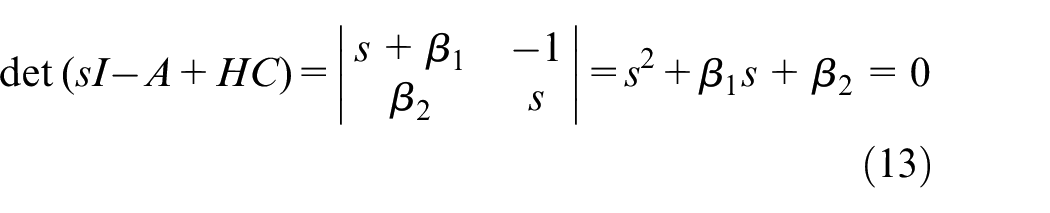
where I means unit matrix.
The ideal characteristic equation of ESO can be selected as
30

where
So, the model of SPMSG’s ESO could be expressed as follow:

Design of ADRC for SPMSG’s speed loop
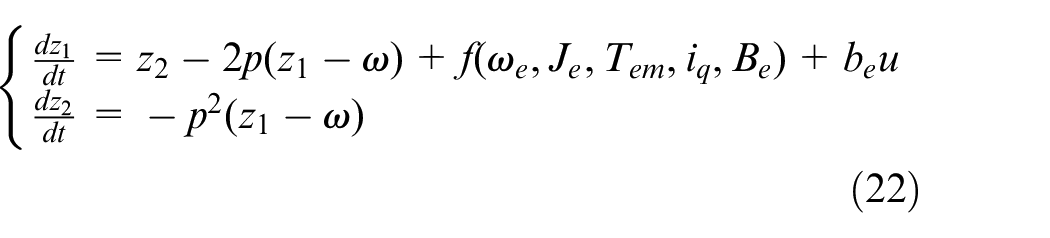
According to equation (8), the speed output of SPMSG can be simplified and expressed as a first-order nonlinear system:

Because the permanent magnet synchronous wind turbine system is a nonlinear, strong coupling, multi variable system, and it is vulnerable to the external environment interference and its own parameter perturbation in the operation process, the ADRC is designed to estimate the interference. Consider

where

Therefore, the ADRC of SPMSG can be expressed as:

The corresponding linear control law can be designed as 31 :

where,
Design of model-compensation ADRC for SPMSG’s speed loop
Because the external environment suddenly changes, the WECS will undergo a sudden change, which will cause a change of the torque
In this paper, a model synthesis compensation strategy is proposed for the disturbance caused by the estimation of torque, moment of inertia
According to equation (18) can be given as follows:
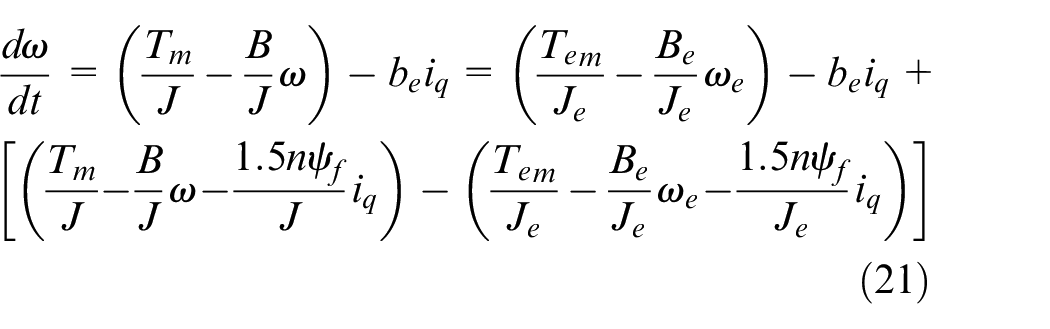
where
According to equations (19) and (20), the model-compensation ADRC, can be designed as:
The control law can be designed as:

Where
Consider
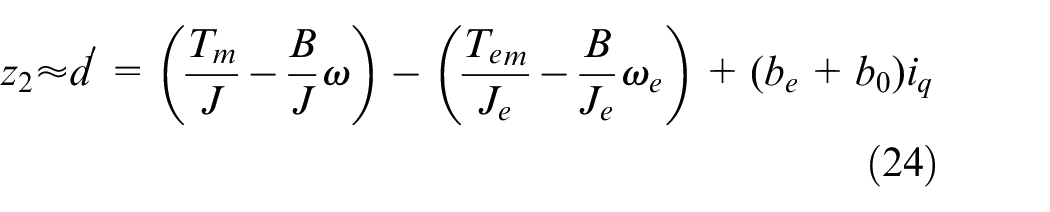
where
The parameter

Where
According to the equation (24), if
Design of Inertia Identification, Torque and viscous friction coefficient Observation
Considering the change of system inertia caused by environment change in wind power system, equation (26) shows the estimation equation of inertia 15 :
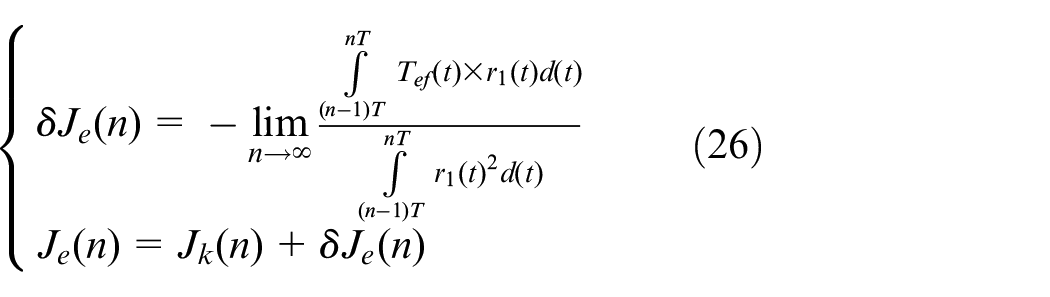
Where
Figure 2 shows the diagram of inertia and torque estimation, where
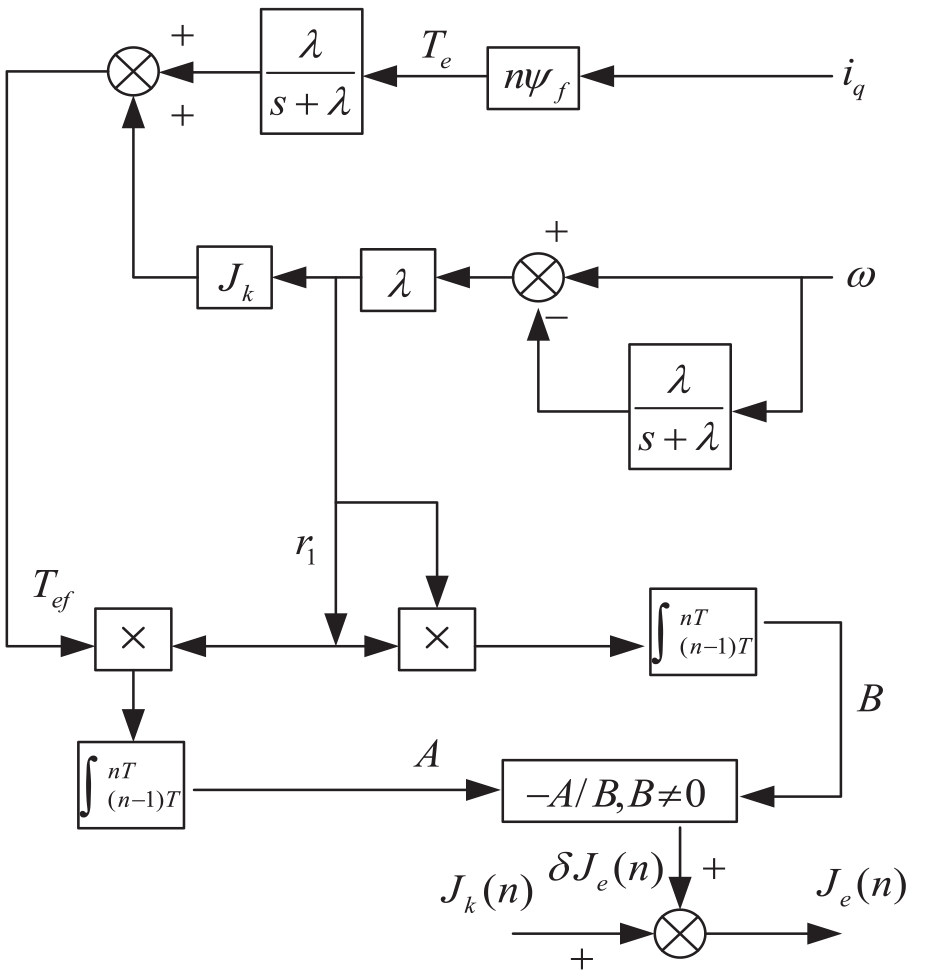
Inertia and torque estimation for SPMSG.
According to the equation (16), when inertia and torque are known, viscous friction coefficient
Where
Design of SPMSG’s model predictive current control
First, literature16–24 all show that current predictive control has higher system bandwidth than PI. Therefore, this paper designs current predictive control strategy instead of PI control. Then, the current predictive control strategy is designed in this paper for the sudden change of external environment, such as the sudden change of wind speed and moment of inertia, which is different from the application of PMSM.
As the current is the state variable, the state equation of SPMSG can be obtained according to equation (6) as shown:

where
In this paper, control period, current sampling period and inverter switching period of the servo system are all T, so after discretization, the state equation of SPMSG is shown in equation (29).
In this paper, SPMSG current at next moment can follow the current command value without delay. At the same time, we design the loss function to measure the control performance of the algorithm. The loss function of current predictive control is designed:

In order to make the selection of reference voltage output of
According to equation (29), the reference output voltage

Considering the direct cause of current delay is that the reference output voltage
The calculation equation of
In the wind power generation system, the change of inertia or the sudden change of wind speed will affect the speed prediction in the current prediction process, according to equation (16), the prediction of rotor mechanical speed
where
The calculation equation of

Where
Through equation (32), the calculation of
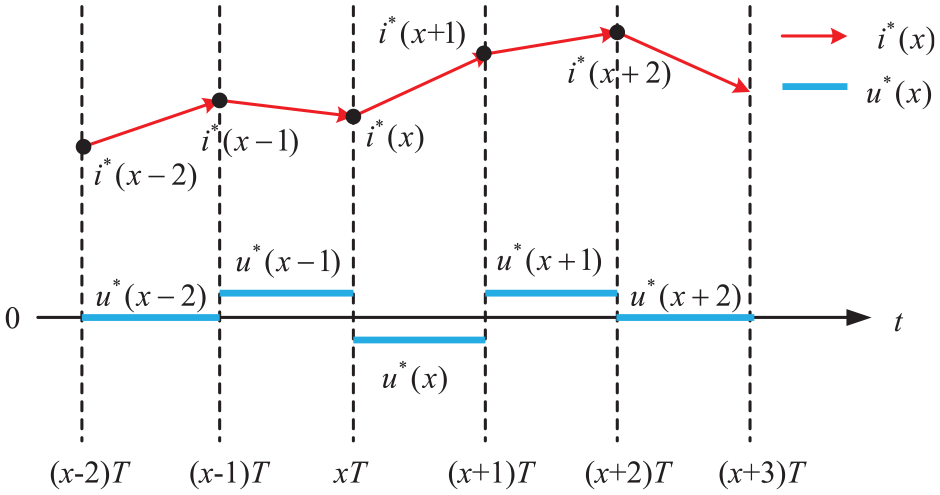
Time delay compensation of model predictive current control.
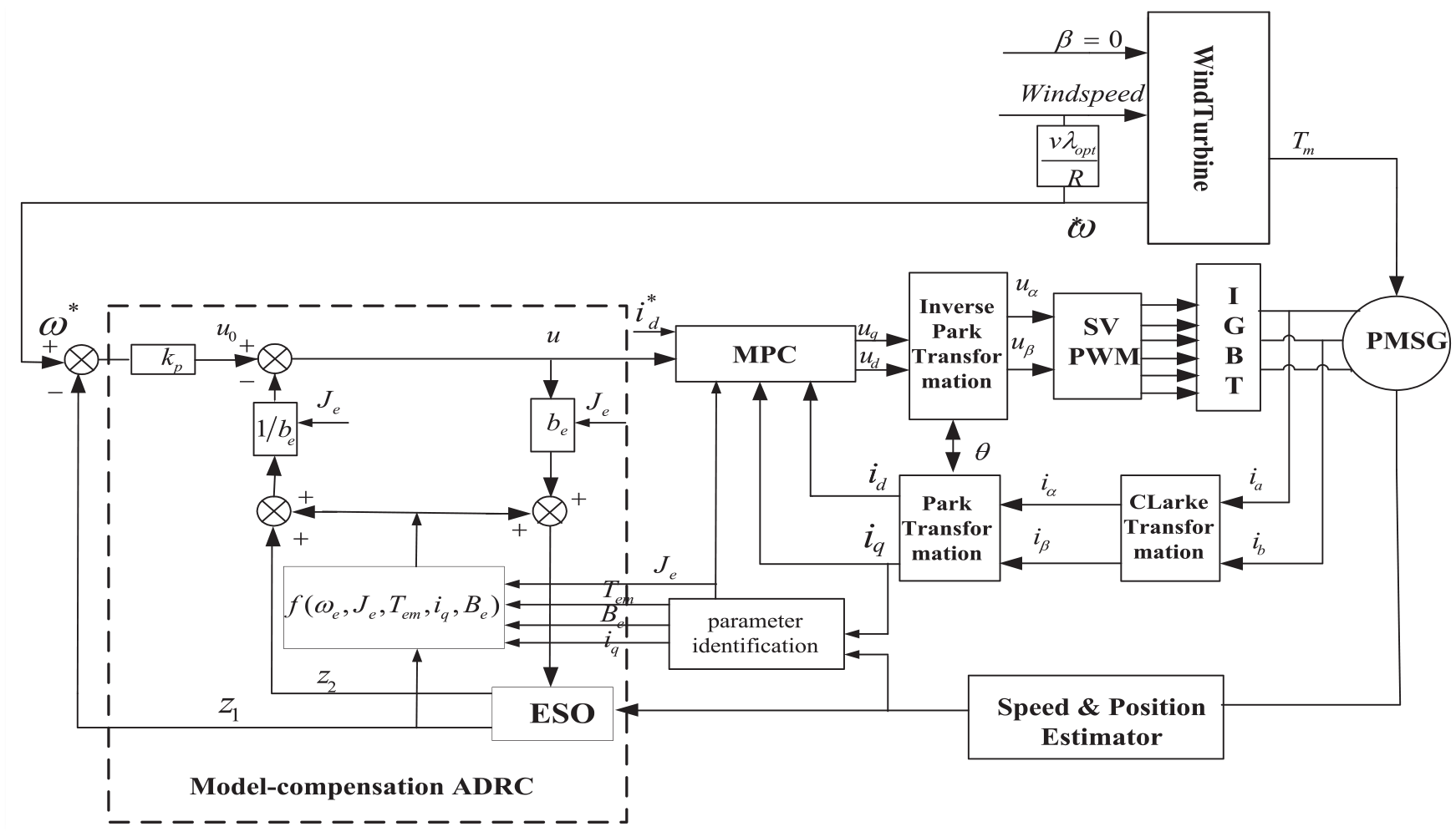
The scheme of SPMSG based on model compensation ADRC+MPC.
Simulation results and analysis
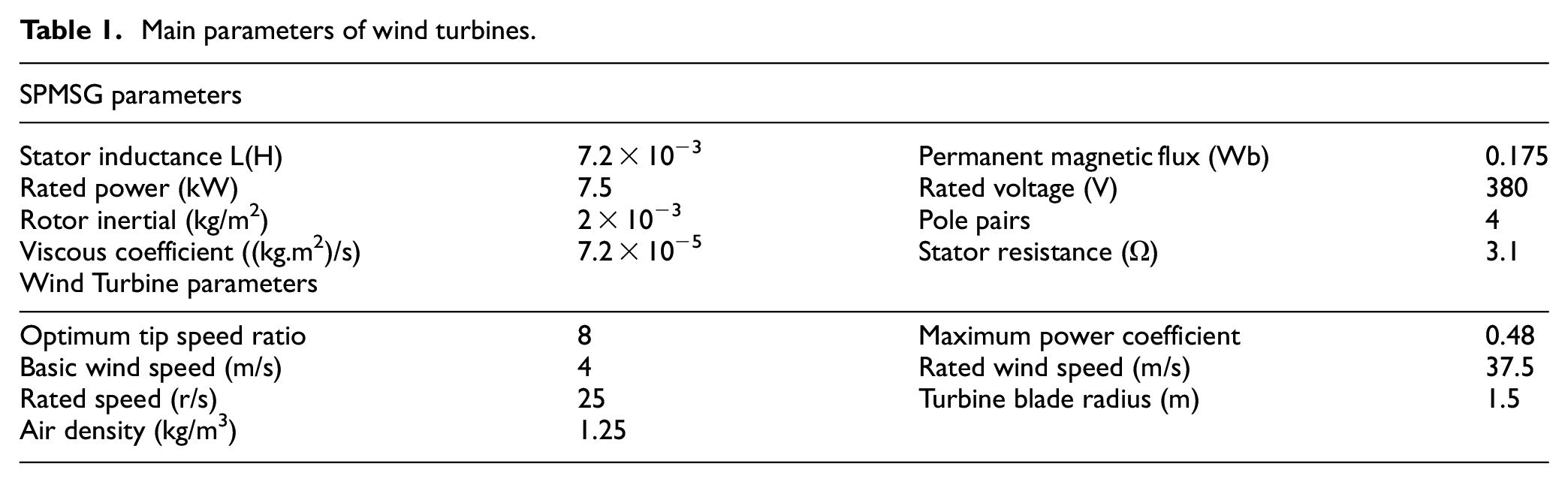
In this paper, based on MATLAB Simulink simulation software, the model of the designed composite controller is analyzed, and the simulation verification is given. In order to more truly simulate the specific characteristics of wind speed in practical application, the actual operating conditions of wind power generation system under gust, gradual wind, random wind and natural wind are mainly studied. The control performance of the composite controller under the four wind speeds is studied, and compared with the traditional ADRC, model compensated ADRC as well as model compensated ADRC+MPC. Table 1 shows wind turbine’s parameters used in this paper.
Main parameters of wind turbines.
In this paper, basic wind speed is 4 m/s, the gradual, random, gust, and natural wind speeds are used to simulate wind speeds. The natural wind is combination of gradual wind, base wind and random wind and gust wind.33–36 the wind speed chart is shown in Figure 5.
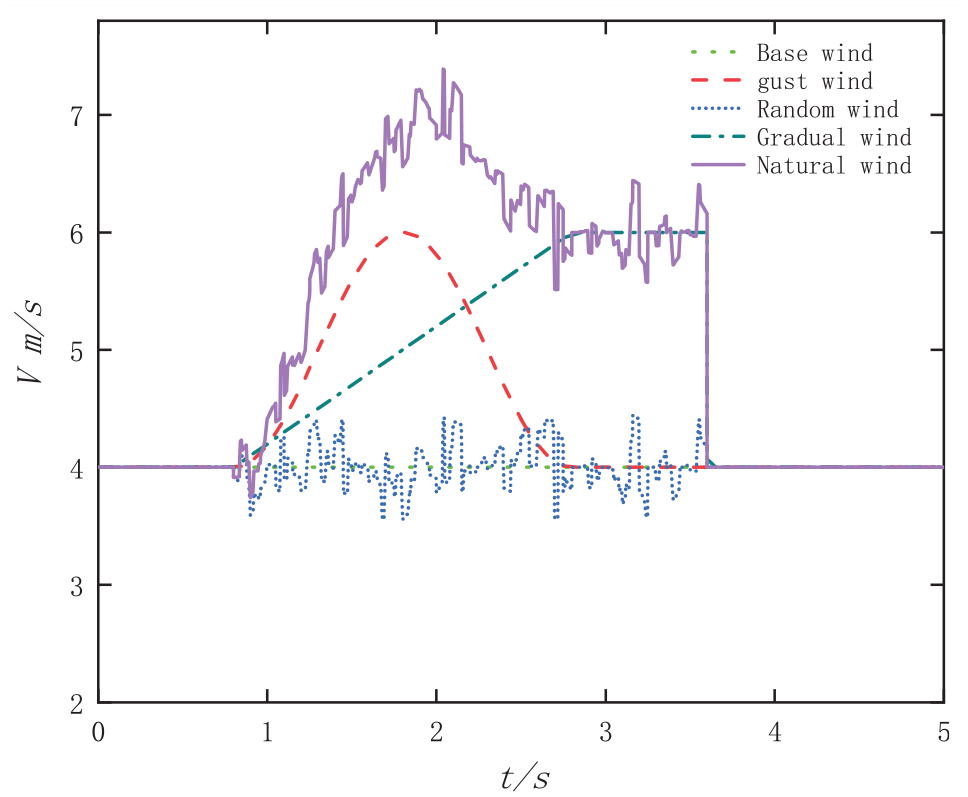
Wind speed charts.
The wind simulations
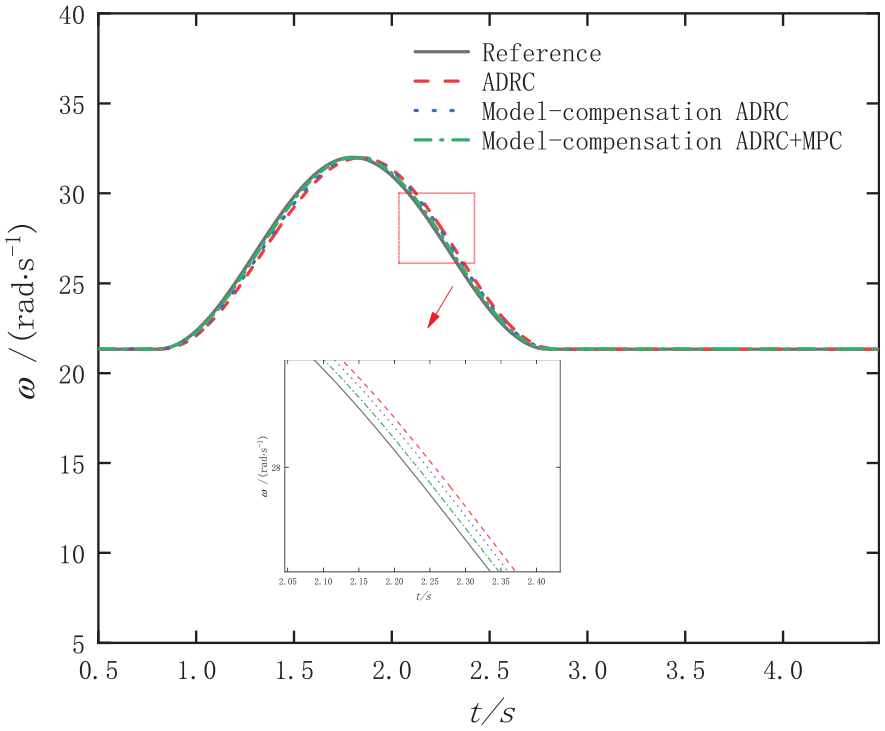
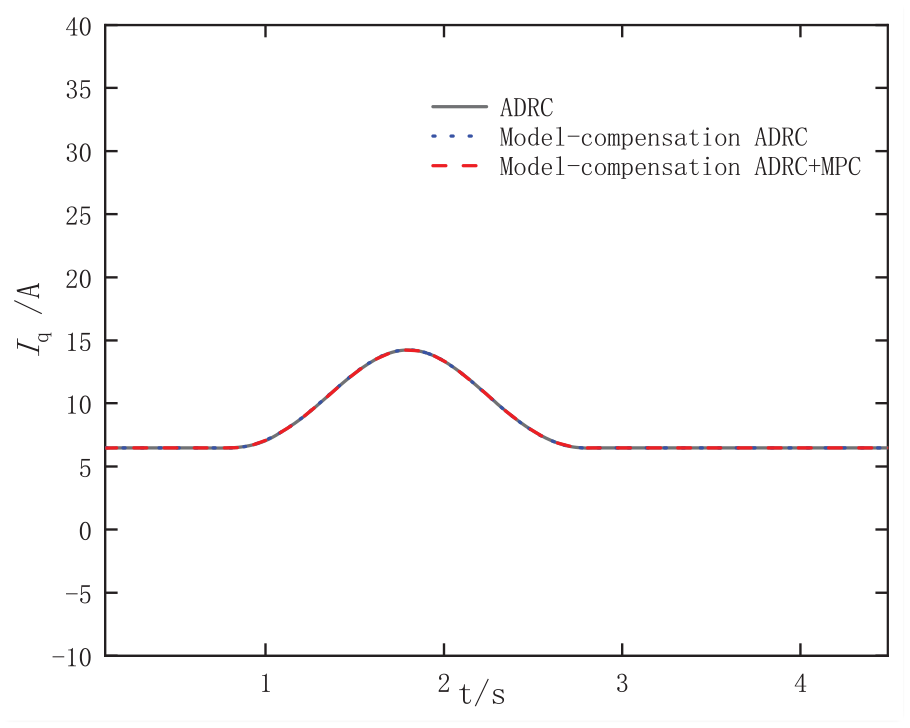
Case 1: Simulation of the gradual wind
The gradual wind shows characteristics of slow changes in wind speed.
Figure 6 shows the speed tracking effect of the three control strategies at this wind speed. Figure 7 shows the output response comparison curves of the three control strategies under the gradual condition.
The gradual wind tracking performance.
The gradual wind controller output response comparison.
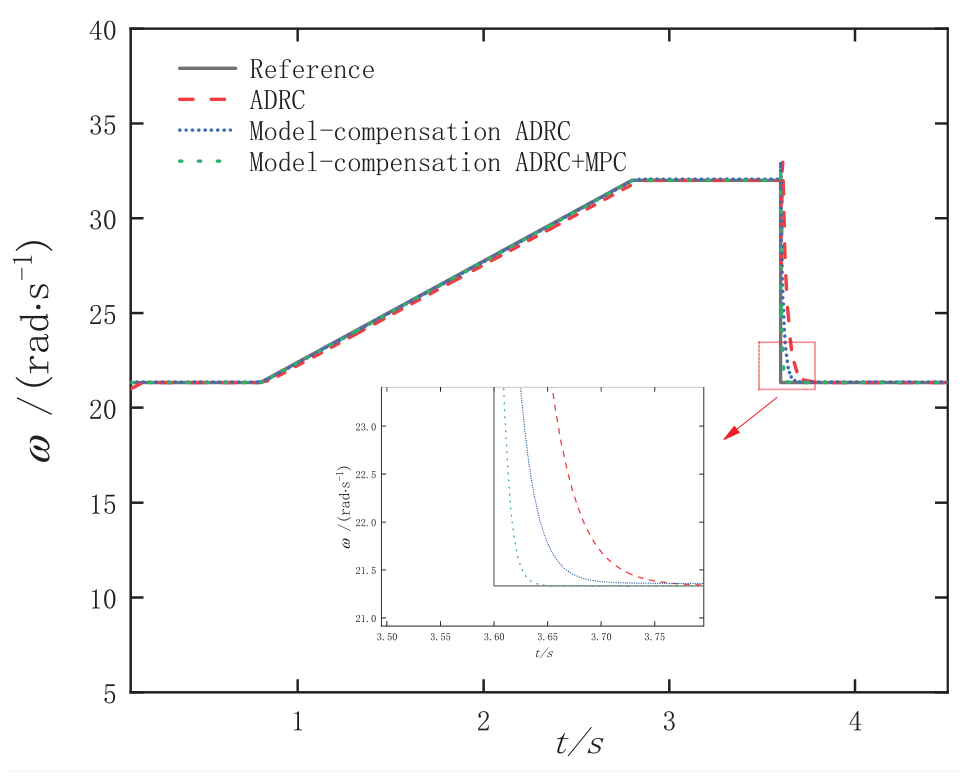
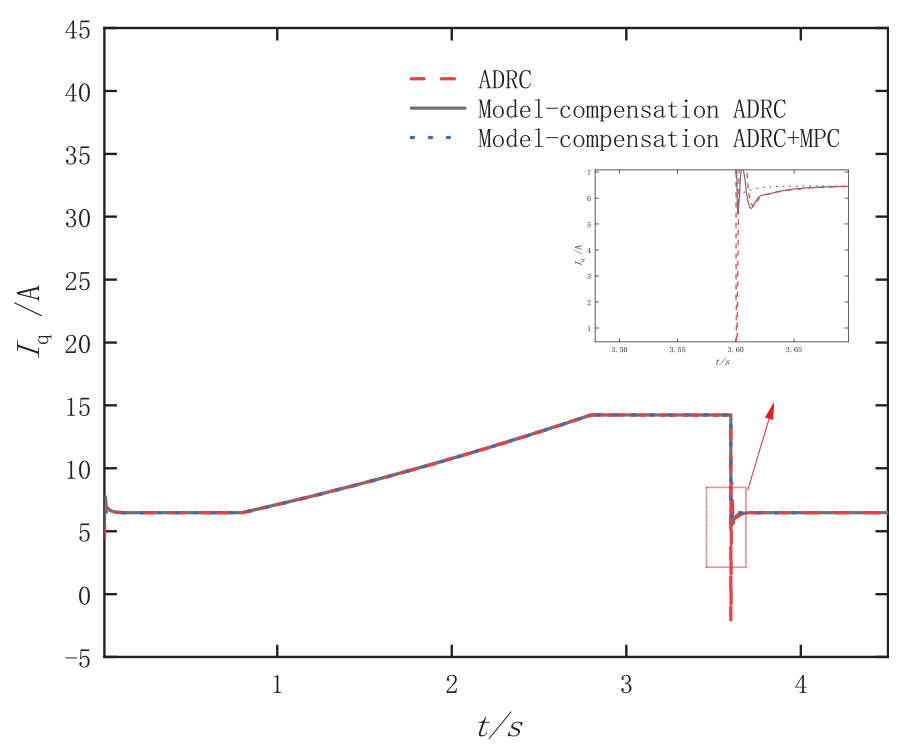
Case 2: Simulation of the gust wind
The gust wind is characterized by sudden changes in wind speed. So gust wind can be expressed by cosine function.
Figure 8 shows the speed tracking effect of three control strategies under this wind speed. Figure 9 shows the output response comparison curve of three control methods in this speed.
The gust wind tracking performance.
The gust wind controller output response comparison.
Case 3: Simulation of the random wind
The random noise wind speed can simulate the randomness of wind without rules.
Figure 10 shows the speed tracking effect of three control methods under random wind speed. Figure 11 shows the output response comparison curve of three control methods in this speed.
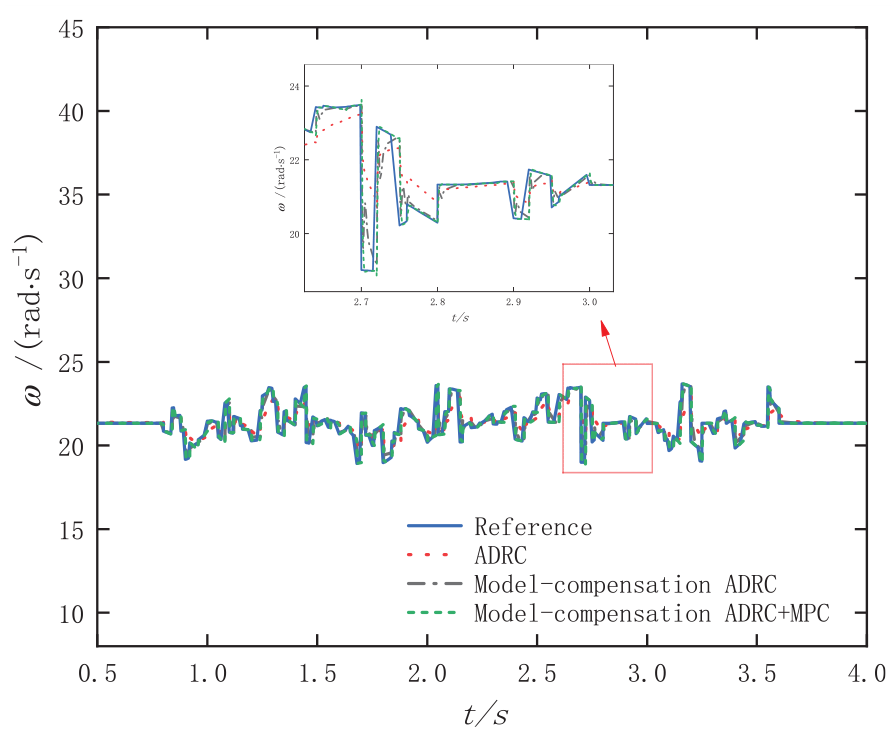
The random wind tracking performance.
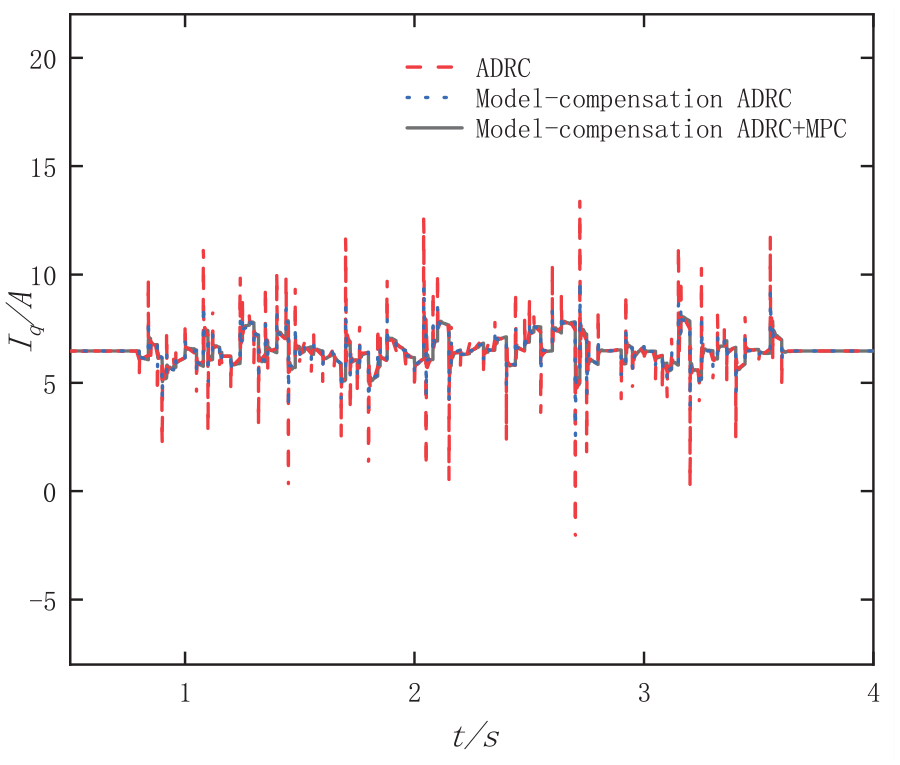
The random wind controller output response comparison.
Case 4: Simulation of the natural wind
The natural wind contains above four kinds of wind, which has strong variability and randomness.
Figure 12 shows the speed tracking effect of the three control methods under this wind speed. Figure 13 shows the output response comparison curves of the three control strategies at this speed.
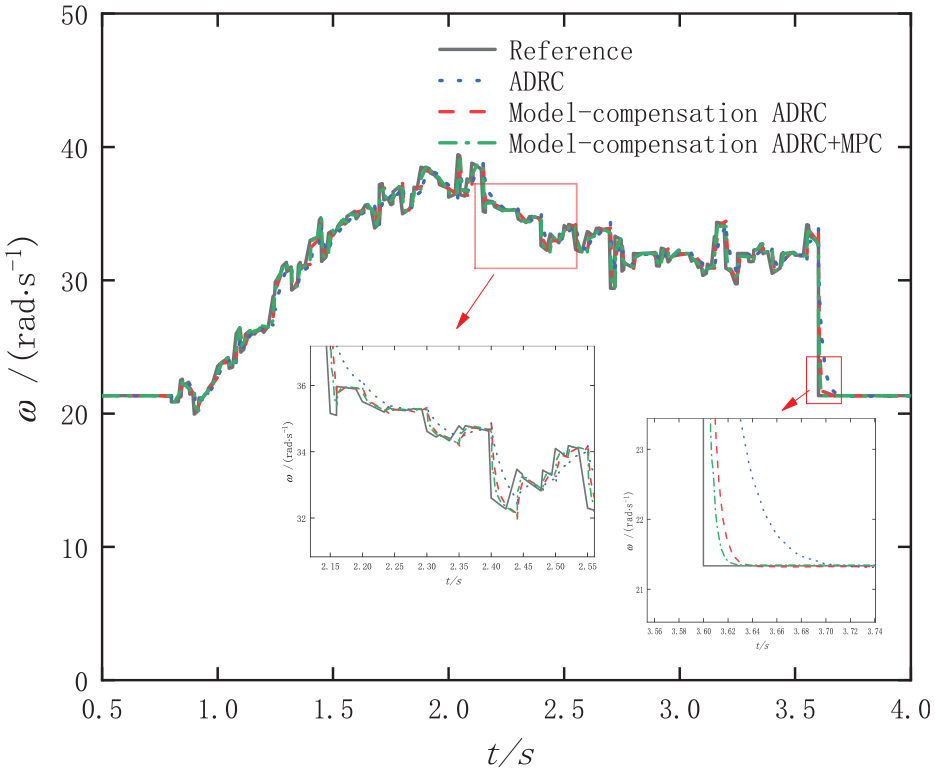
The natural wind tracking performance.
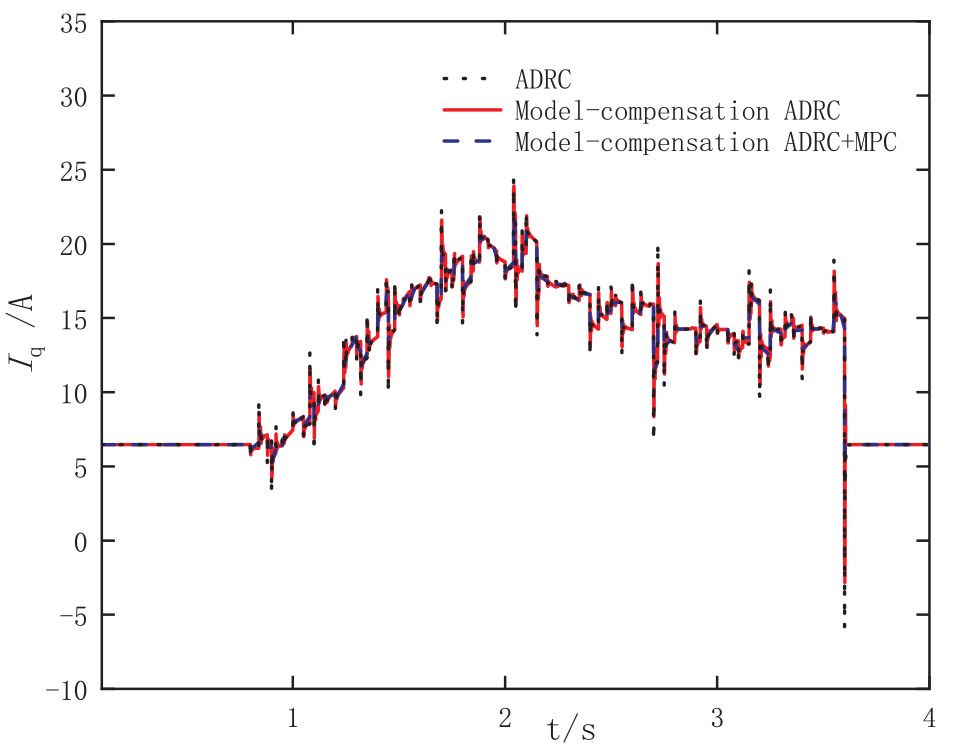
The natural wind controller output response comparison.
In this paper, we use integral of absolute error (IAE) performance index to estimate the control performance of tracking performance are list in Table 2. It can be seen that the IAE of the model-compensation ADRC+MPC scheme are much smaller than that under the traditional ADRC scheme and model-compensation ADRC scheme.
The absolute error (IAE) interval index of different control methods in natural wind field.

Simulation analysis
It can be seen from Figures 6 and 8 that when the wind is gradual or gust wind, the wind changes steadily, the disturbance is not large and the system effect is no big gap. Figures 6 and 8 show that the control effect of the compound control strategy is better than that of ADRC and Model-compensation ADRC. Figure 7 shows that under the condition of gradual wind speed, the model-compensation ADRC+MPC control strategy can track the actual wind speed quickly and accurately, and the control quantity
Figures 10 and 12 show the tracking effect when the wind speed changes greatly. It can be seen from the figure that when the environment changes severely, the composite controller adopts the inertia identification adaptive controller for speed compensation, and adopts the model predictive current control to speed up the current loop tracking speed and reduce the delay, which can quickly track the wind speed, and the control effect is excellent. Figures 11 and 13 show that the control quantity
The above simulation results show that the compound control algorithm designed in this paper can speed up the response speed of the current loop and reduce the delay of the current loop, at the same time, adding an active disturbance rejection control algorithm to the speed loop has stronger anti-disturbance ability and better robustness. It has better control effect in wind power generation control system.
Conclusion
In this paper, ADRC technology, inertia identification technology and model predictive current control technology are combined, and the maximum power tracking control of the change of the torque and the moment of inertia for direct-drive permanent magnet synchronous wind turbine system is realized by designing a composite controller. In the paper, the composite controllers are designed separately. ADRC estimates disturbance of the whole system in real time and gives the estimated value of disturbance. The observer is used to calculate the real-time torque and moment of inertia, and model-compensation ADRC is designed to compensate ADRC. The model predictive current control technology for the sudden change of external environment is designed to speed up the response speed of the current loop, and eliminate the delay of the current loop system. Finally, a simulation analysis is given in this paper, and the simulation results verify the effectiveness of the designed composite controller. The control strategy used in this paper improves the performance of the control system, but compared with PI, it also increases the complexity of the control system. In practical application, it can be selected according to the system memory and system control accuracy.
Footnotes
CRediT authorship contribution statement
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Faculty Startup Fund for Scientific Research by Nanjing University of Aeronautics and Astronautics (Grant No. 3002-YAH19113).