
Abstract
This paper proposes an adaptive finite-time sliding-mode control approach based on neural networks to address the coupled motion of ships with liquid tank dynamics. Firstly, a brief analysis of ship sloshing dynamics is conducted to derive the impact of sloshing forces on the governing equations of ship dynamics. Secondly, to achieve effective tracking control, a dynamic positioning model of the ship is established using the Froude-Kryloff assumption, simplifying the handling of complex terms. Next, based on analysis of ship mechanics, the control equations for liquid-carrying ships are derived. Then, a finite-time hierarchical sliding-mode controller is designed to stabilize the system within a global finite time using nonlinear sliding surfaces. Subsequently, to address the unknown upper bounds of the nonlinear sloshing forces and second-order wave forces, an RBF neural network along with an adaptive control method is employed. In addition, the global finite-time stability of the system is proven using Lyapunov stability theory and homogeneity. The significance of these findings lies in their potential to enhance operational stability and safety in maritime applications, providing valuable insights for both research and practical implementation. Finally, numerical simulations are conducted to confirm the effectiveness of the proposed control approach, demonstrating its potential to significantly improve operational stability in various maritime operations.
Keywords
Introduction
With the rapid development of artificial intelligence and unmanned technologies, the application of unmanned ships is becoming increasingly widespread. There is a growing body of research on ships, for example, Long et al. conducted a series of control studies on surface boats.1,2 The maritime conveyance of substantial volumes of fluids, including petroleum, liquefied natural gas, and liquid hydrogen, is gaining increased attention.
When large unmanned liquid carriers transport liquids in their own tanks, due to the significant volume of liquids, the ship will swing violently when it encounters adverse sea conditions, and the wide range of swinging of the ship will cause the liquid tank to swing strongly, thus generating a strong and repeated swinging force acting on the bulkhead, which seriously affects the ship’s motion. When the frequency of the ship’s hull movement approaches the natural frequency of the liquid cargo hold, it may induce resonance between them, causing the vessel to sway further and potentially leading to capsizing, which could result in serious safety hazards.3,4 Therefore, research on the control of liquid-carrying ships is of great significance to the marine transport industry. In order to efficiently achieve liquid transport as well as the stability of unmanned liquid-carrying ship navigation, it needs to rely on efficient and accurate ship six-degree-of-freedom trajectory tracking control. The impact of liquid tanks on liquid-carrying ships can be summarized as follows: liquids will sway back and forth in the tanks when the ship is in motion, thus changing the position of the ship’s center of gravity all the time; the liquids are powerful to the walls of the tanks and the transported liquids may be very viscous, such as petroleum. 5 Thus, achieving six-degree-of-freedom tracking control for large unmanned liquid-carrying vessels presents significant challenges.
Based on the existing literature, it can be roughly classified that the research on the coupled motion of ships and liquid tanks falls into two categories: numerical analysis of the coupled motion of ships and the design of motion controllers for liquid-carrying ships or liquid tanks. Currently, there is limited research in the control of liquid-carrying ships, leaving substantial room for further progress in this area. Using the inverse model of a tracked object, Noda et al. 6 proposed a 2-DOF system with a feed-forward controller, in which the sloshing control of the tracked object is conducted by a feedback controller designed by the hybrid shape method. Hu et al. 7 proposed a rolling motion control algorithm combining MPC and a gyro stabilizer and designed a combined controller. Qi et al. 8 proposed a new constrained attitude tracking control and active wobble suppression scheme that uses the forces and torques generated by liquid wobble as nonlinear functions of the spacecraft state, and suppresses liquid wobble by limiting the angular velocity and controlling the torque and its rate of change. Kurode et al. 9 designed a nonlinear sliding mode observer to estimate the tilt angle and loss rate of liquid sloshing in a flowing vessel for a high gain approach to a simplified subsystem. Song et al. 10 investigated liquid-filled spacecraft with significant liquid sloshing by designing a predefined-time attitude controller with moment constraints, followed by the development of a new control algorithm that combines sliding mode control with predefined-time stabilization. Deng and Yue 11 designed a hybrid controller that integrates sliding mode control with an adaptive algorithm for spacecraft with partially filled liquid propellant tanks to achieve attitude tracking. Most of the previous work on liquid-carrying control has focused on applying controllers to liquid tanks or on attitude trajectory tracking done by spacecraft or robots, highlighting the considerable innovative interest in studying trajectory tracking control for automated liquid-carrying ships.
In this paper, an innovative set of six-degree-of-freedom power-positioned motion control equations for liquid-carrying ships is proposed, based on an in-depth mechanical analysis of ship-liquid coupled motion. In the numerical analysis of the coupled motion of the ship and liquid tank sloshing, the radial force in the first-order wave force, as a function of the wave frequency, when converted from the frequency domain to the time domain by Fourier transform, produces a convolutional integral term that is computationally complex and requires high accuracy, which makes the numerical computation face great challenges. Additionally, computing the forces generated by the liquid chamber wakes is also highly complex, further increasing the analytical challenges. 12 In order to solve these computational challenges, this study adopts the Froude-Kryloff hypothesis, which successfully circumvents the complex convolutional integral treatment and directly derives the analytical expression for the first-order radiative force under regular waves. 13 As noted in Fossen TI and Fjellstad 14 , the nonlinear positioning power ship model without liquid tanks is obtained, and the swaying force is reasonably added to the right end of the ship’s equation of motion according to the analysis of the coupled equation mechanics thus obtaining the final motion control equation. Secondly, the forces generated by liquid sloshing in the equations are approximated using a neural network, 15 and an adaptive law is designed for the network weights with the second-order wave forces with an unknown upper bound. 16 Subsequently, a finite-time hierarchical sliding mode controller is designed using a nonlinear sliding mode surface, which not only ensures that the state of the system can converge to 0 in finite time with systematic error and avoids the singularity phenomenon by adding an integral term in the sliding mode surface. The introduction of a convergence law containing a nonlinear term allows the system to reach the sliding mode surface in finite time, and the global finite time convergence of the system is proved by the homogeneity theory 17 and the finite-time Lyapunov stability theory, which enables the system to achieve global finite time stability.
In this paper, an adaptive finite-time sliding-mode control method is proposed based on the derivation of the coupled motion control equations for liquid-carrying ships, enabling efficient control of these vessels. The main contributions of this study can be summarized as follows:
(1) The research involves an in-depth mechanical analysis of liquid-carrying ships, leading to the development of control equations that facilitate the precise positioning of these vessels.
(2) To address the unknown elements within the control equations, this study employs adaptive techniques and utilizes Radial Basis Function (RBF) neural networks to approximate the nonlinear swaying forces associated with liquid motion.
(3) A cutting-edge nonlinear sliding mode control law has been crafted for liquid-carrying ships to regulate their six-degree-of-freedom motion, ensuring they can swiftly and reliably achieve the intended attitude and trajectory within a finite time frame.
(4) Last but not least, simulations validate the control equations, refines neural networks, and ensures the robustness of ship control strategies.
This paper is organized as follows: The problem statement section presents the mechanical analysis of the ship and derives the control equations for the coupled motion of a liquid-carrying vessel. The controller design section details the main results, including the establishment of a single-degree-of-freedom tracking objective, the design of a term-specific adaptive law, and the development of an adaptive nonlinear sliding mode controller for trajectory tracking. The stability analysis section performs stability analysis using Lyapunov stability theory and homogeneity theory. The simulation section presents the simulation results and conducts correlation analyses. The conclusion section summarizes the conclusions drawn from this study.
Problem statement
To validate the plausibility of the subsequent mechanistic interpretations and the resulting equations, two fundamental assumptions are posited as follows.
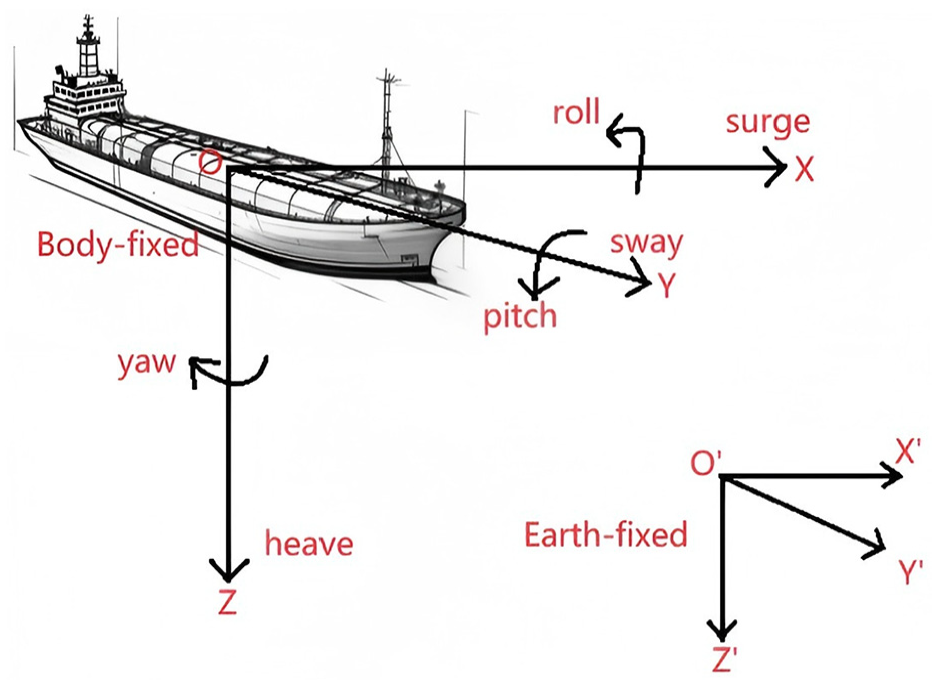
To begin with, envision a ship that lacks liquid tanks. From Newton’s Second Law of Motion, the ship’s six-degree-of-freedom equation of motion can be expressed as

where

where
6DOF motion for liquid-carrying ship.
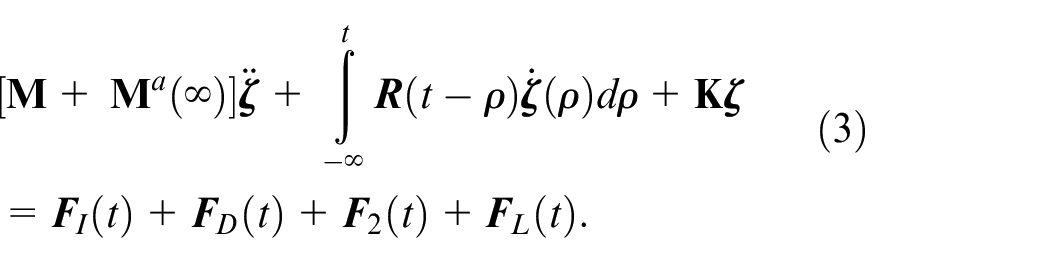
According to (1), (2) and the above analysis, the time-domain equations of motion for the ship without liquid tanks can be obtained as follows:
Considering the effects of liquid tanks on ship movements, liquid chamber actions may exhibit some of the following phenomena:
The liquid in the compartment possesses its own mass and, being a fluid, necessitates the introduction of both a mass matrix for the liquid and an additional mass matrix;
Liquid-carrying ships in motion within tanks will experience shaking due to the presence of a free liquid surface. Consequently, the position of the ship’s center of gravity will shift back and forth, leading to changes in the ship’s restoring force. However, when the liquid tanks sway violently, it becomes challenging to determine a correction for the ship’s restoring force coefficient;
Liquid exerts hydrostatic, hydrodynamic, and viscous forces on the bulkheads of the liquid tank.
Incorporating the effects of liquid tank sloshing into the ship’s equation of motion involves adding the force of the liquid tank, denoted as

where
The equation of motion for the ship coupled to the liquid-tank sloshing in the time domain can be obtained by simply adding the liquid-tank force to the right end of equation (3). 5 It can be written as
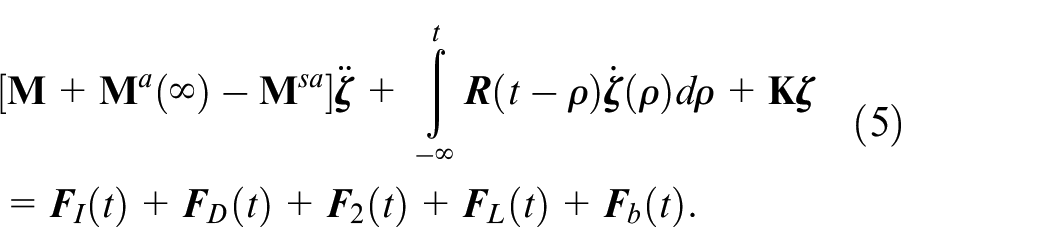
To further explain the plausibility of the control equation model derived below, the Assumption 3 can be given.
The convolution term in equation (5) poses a challenge in determining whether it is bounded or not. Several external forces also complicate the determination process. Equation (5) represents the motion of the ship with the ship itself as the center, which does not allow for the determination of the ship’s position. To realize control over the ship’s motion, a six-degree-of-freedom power-positioned ship motion model must be introduced as follows:

Using the same method as used to obtain the coupled ship-tank motion in equation (5), and adding the tank forces to the dynamics of equation (6), the final six-degree-of-freedom model of a positioned ship in a wave with control inputs can be obtained as
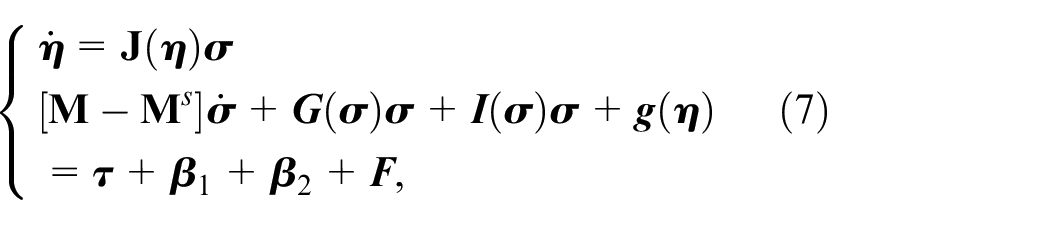
where
Obviously, the combined force
Based on the discussion above, the following two remarks are presented:
Controller design
Figure 2 presents a simple structural block diagram of the control system discussed in this paper. Here,
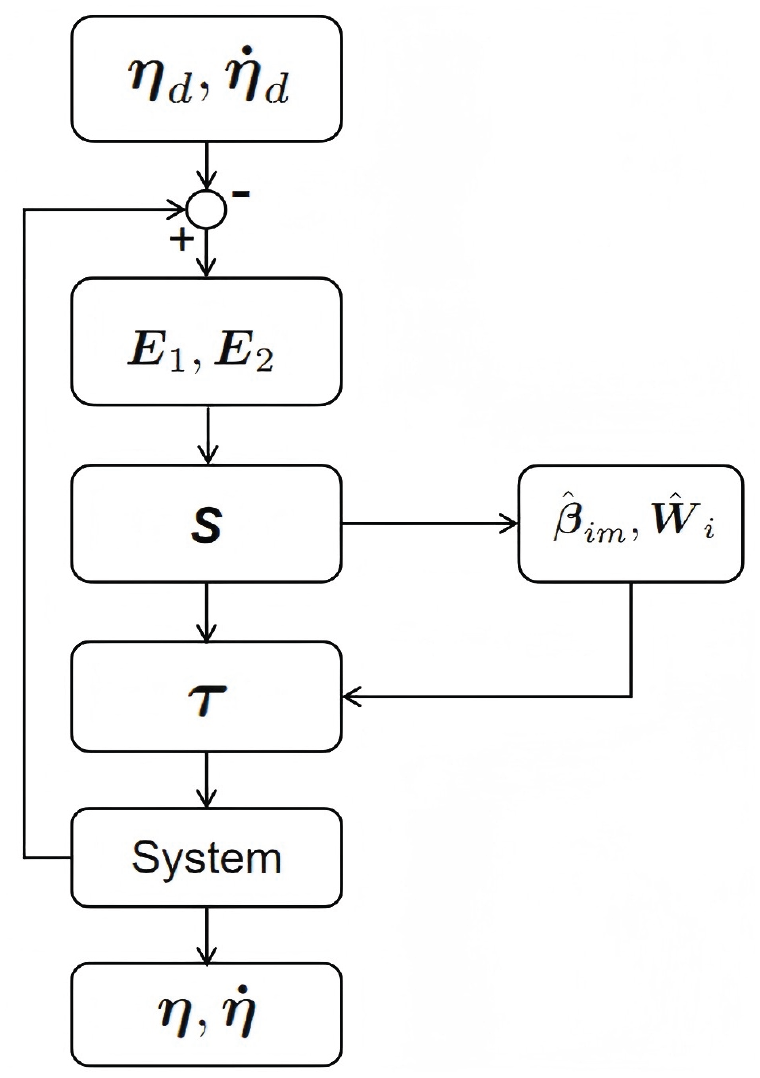
Schematic diagram of control system.
Processing of control equations
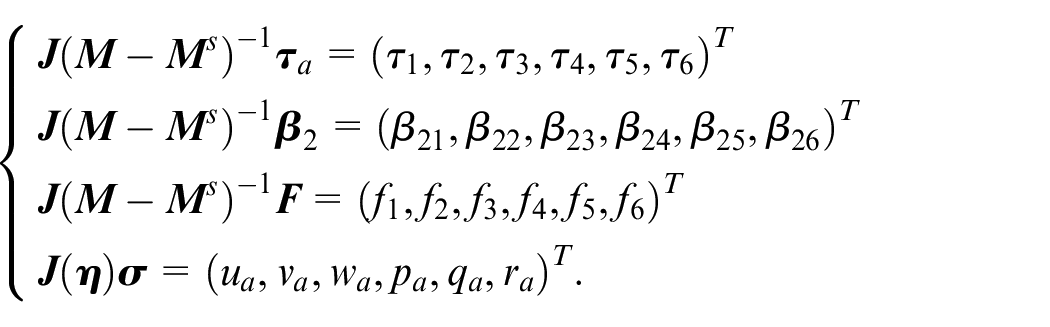
In order to achieve efficient control, it is wanted that

For the known terms in it, an equivalent controller is designed to carry out the processing. Command.

From (7), (8) and (9), it follows

Define
Command
It is clear that equation (10) can be divided into six independent equations, and these independent equations are of the same form. The first one of these can be written as

Formulation of control laws
For the design of the following adaptive law, the sliding surface
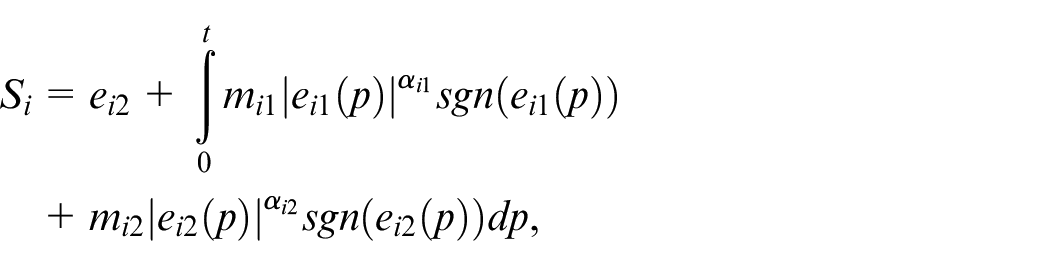
which
Second-order wave force

Radial Basis Function Neural Networks (RBFNNs) are a class of artificial neural networks that use radial basis functions as their activation functions. They are particularly effective in function approximation and pattern recognition tasks due to their capability to model complex, nonlinear relationships. The architecture of an RBFNN typically consists of an input layer, a hidden layer where radial basis functions are employed, and an output layer that aggregates contributions from the hidden neurons.
Using RBFNNs to approximate the nonlinear term
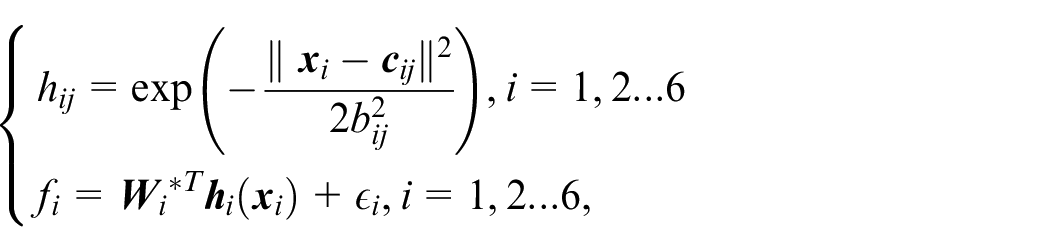
where
The following designed control law carries the second order derivative term
To facilitate the design of the total controller, we first design the control rate for system (11). Based on the above treatment of

Design

where
In order to enable the system to maintain asymptotic stability on the sliding surface in a dynamic situation, it is necessary to introduce a switching control component, and from the reaching law of above given

Then the control input
Define
Then

So

Stability analysis
To ensure brevity in the proof, a stability analysis of system (11) is conducted.

is existing and bounded, then
Choose Lyapunov function

Taking the derivative of
According to Lyapunov stability theory, the system is determined to be stable.
Integrating both sides of inequality (15) yields:

then
The initial state
According to
Also choose Lyapunov function

Taking the derivative of
Since
The above proves that the system represented by (11) arrives at the
(i)
(ii) The origin
When

Choose Lyapunov function

Take the derivative of
When
Define

The above system of equations can be written as
by changing the independent variable to
Command

From the above proof,
Here,
In the following section, a brief analysis of global finite-time stability will be conducted, defining

Choose Lyapunov function

Modeled on the (15), take the derivative of
Similarly, according to
Next, define Lyapunov function

Similarly, the homogeneous vector functions
It is subsequently established that system (11) reaches the stability point (0,0) within a finite time of systematic errors after reaching the sliding surface. Based on this proof, it can be demonstrated that the tracking errors of the other five subsystems, as delineated by system (10), converge to
In conclusion, under the influence of the designed control law (14), the tracking error
In practical engineering, in order to avoid highly oscillating situations, the
Simulations
Simulation and results
In order to verify the effectiveness of the proposed control rate for liquid-laden vessels, the following simulations are conducted in MATLAB. This paper simulates system (11) with the ultimate tracking objectives being the actual position and velocity (the derivative of position). In this paper, the system (11) is simulated. Given that the ultimate tracking objectives are the actual position and velocity (the derivative of position), a time-varying function with non-zero derivatives is selected for tracking purposes. To validate the performance of the control law, a time-varying trigonometric function is specifically chosen as the desired function. The pair
In the expectation function of the trace, we choose
Figure 3 illustrates the systematic error when the control rate is absent, demonstrating that the ship’s trajectory does not converge to the desired path, while the velocity error shows significant oscillations.
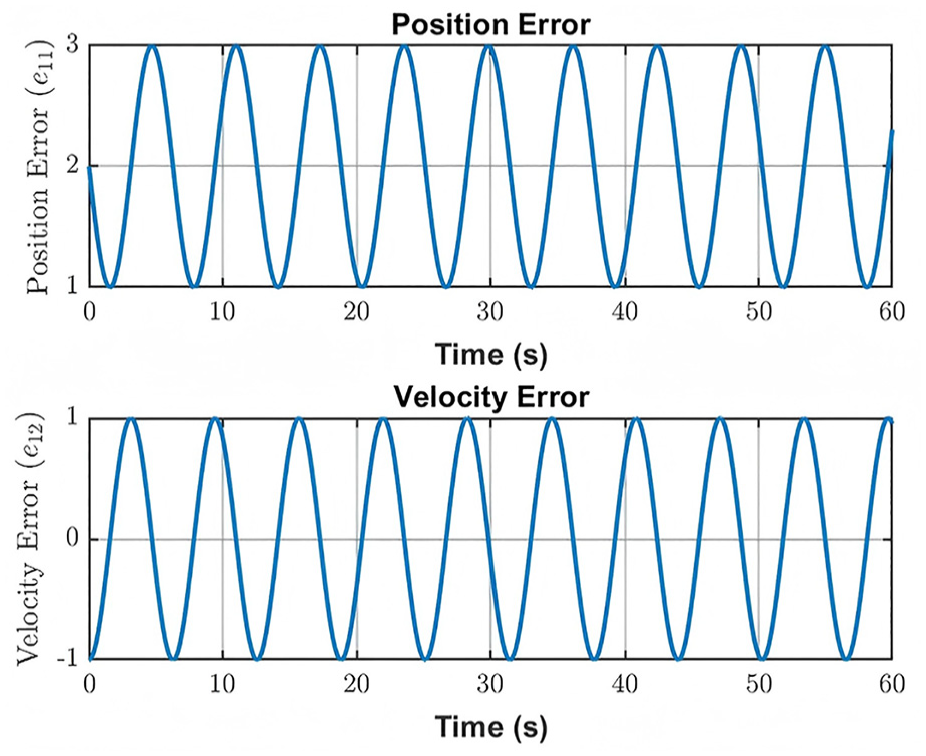
Systematic errors without control laws.
Firstly, an initial selection of the controller parameters was made as follows,
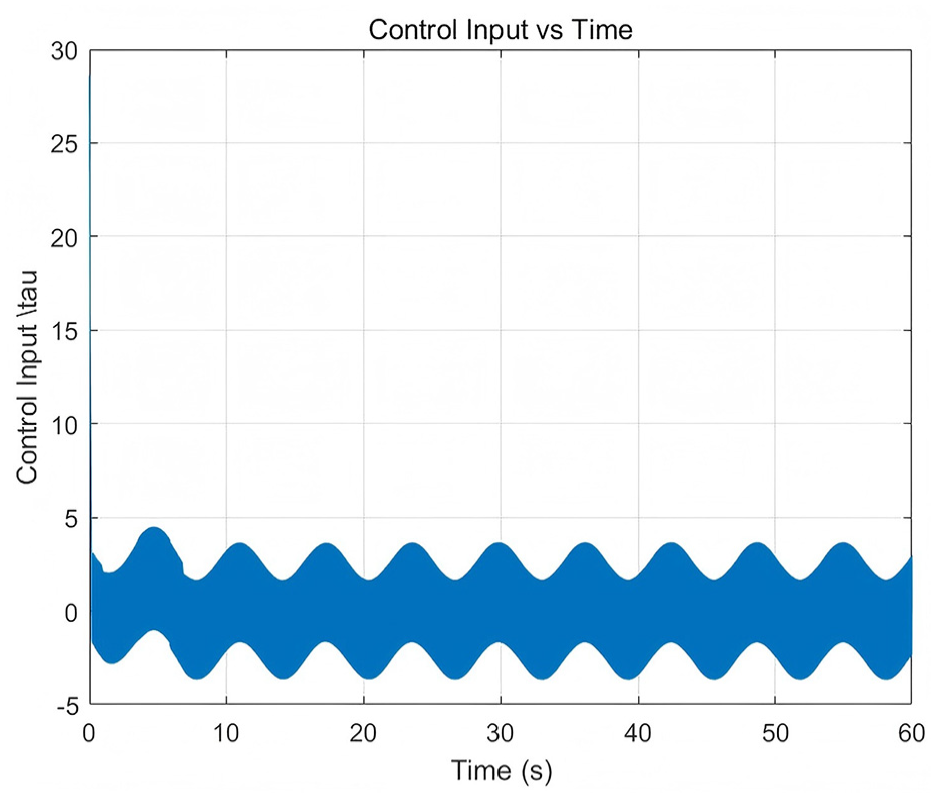
Control law.
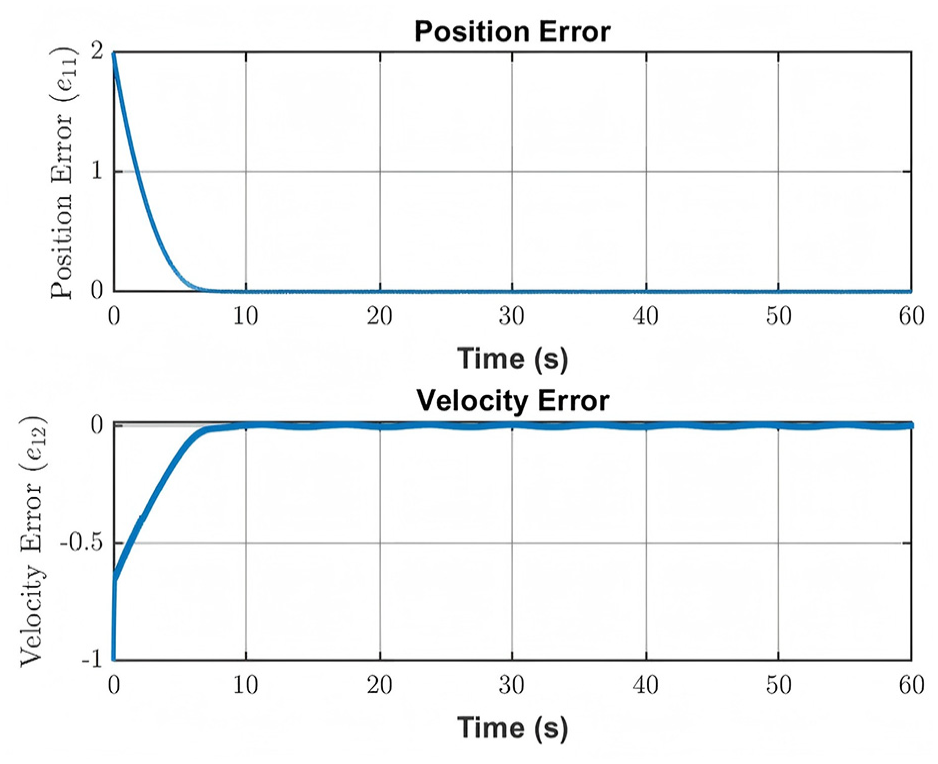
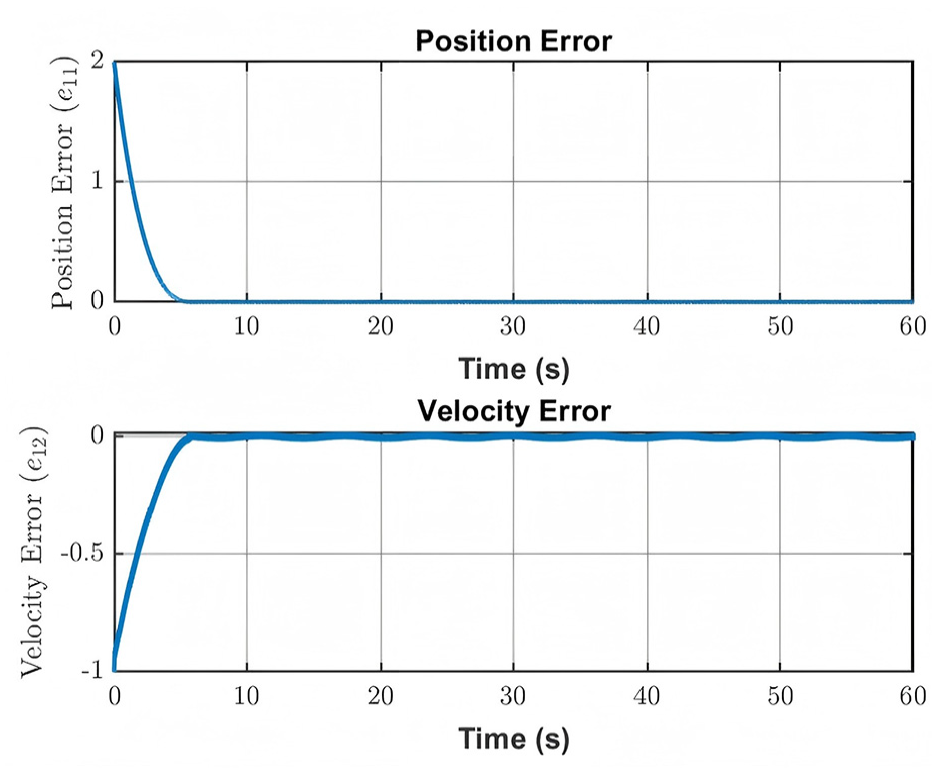
Position error-1 and velocity error-1.
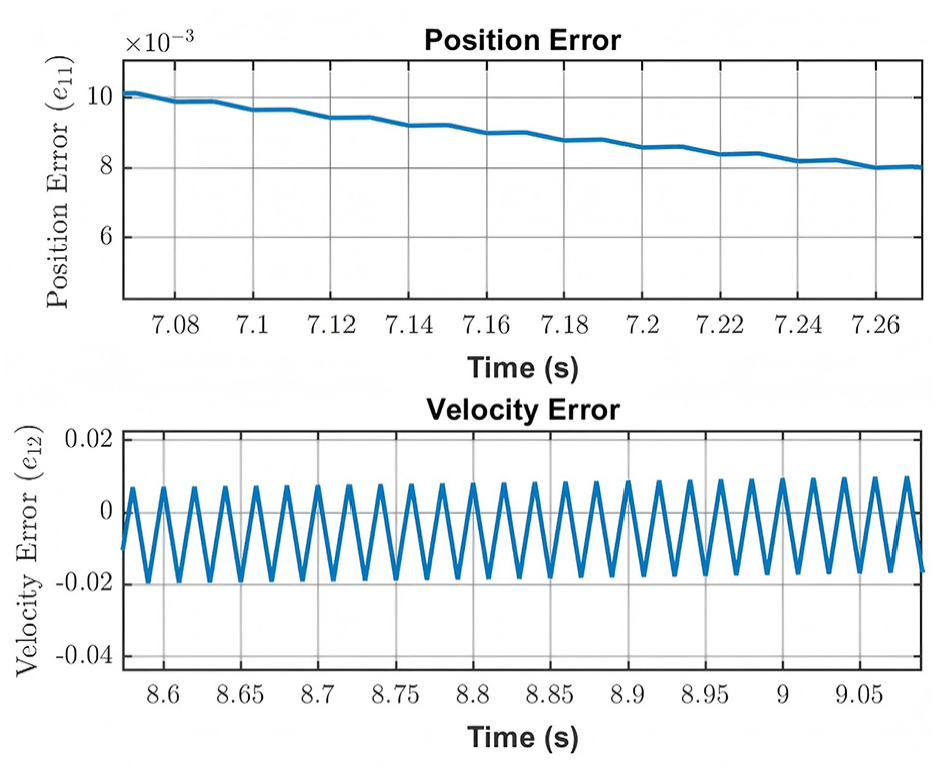
Image enlargement of error-1.
In order to test the performance of the given control rate, based on the previously given parameters of the controller, several parameters are modified. The results shown in Figures 7 and 8 are obtained by increasing both
Position error-2 and velocity error-2.
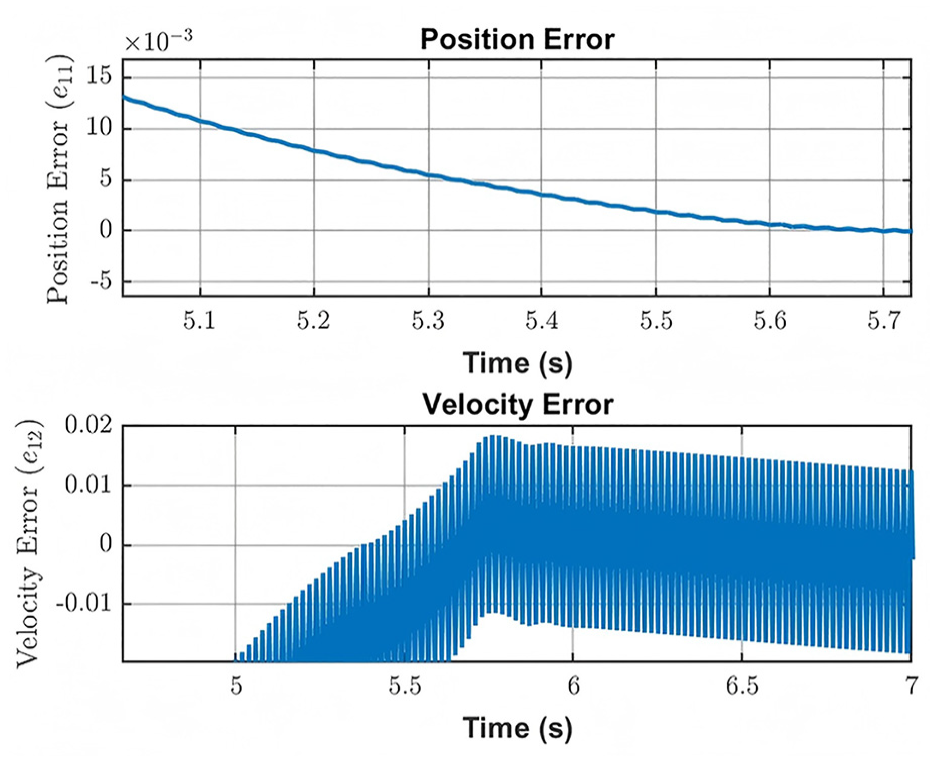
Image enlargement of error-2.
In the Stability Analysis section, it is demonstrated that, under the designed control law, the system error can converge to 0 in finite time. In the numerical results, the system error is generally reduced to less than 2% of its original value relative to the initial value. However, in the actual numerical simulations, the use of the sign function (
This research employs a control law based on the signum function, which is set-valued at zero (
The errors exhibited in Figures 6 and 8 converge to 0 in finite time; however, both the position and velocity errors oscillate during this convergence, with the velocity error displaying more pronounced oscillations. Consequently, a preliminary attempt is made to apply the control law involving a saturation function (
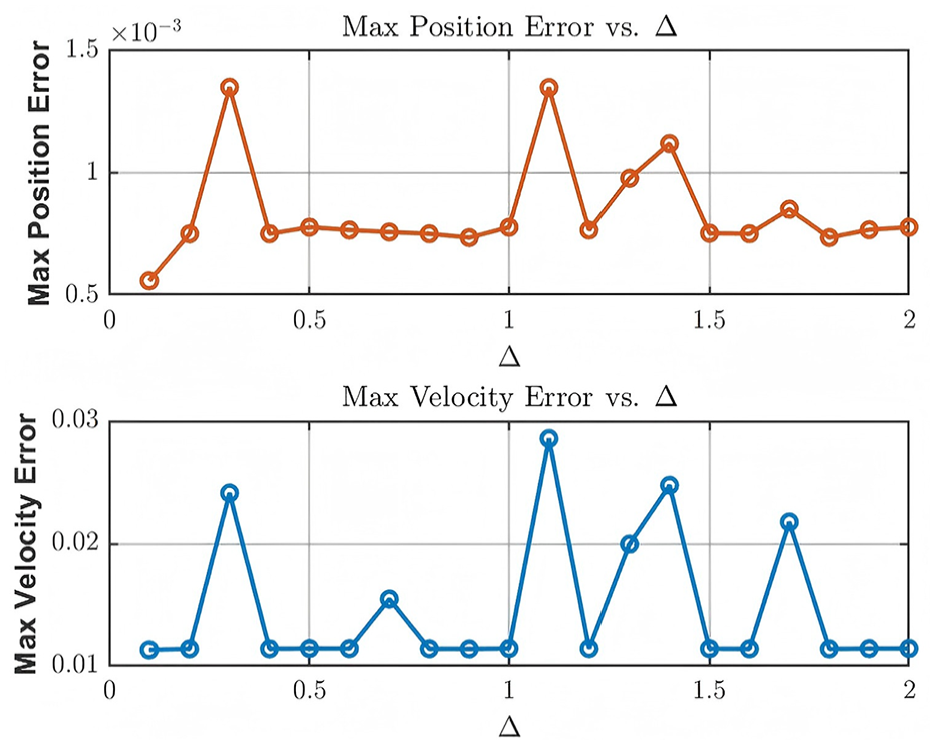
Max system error versus
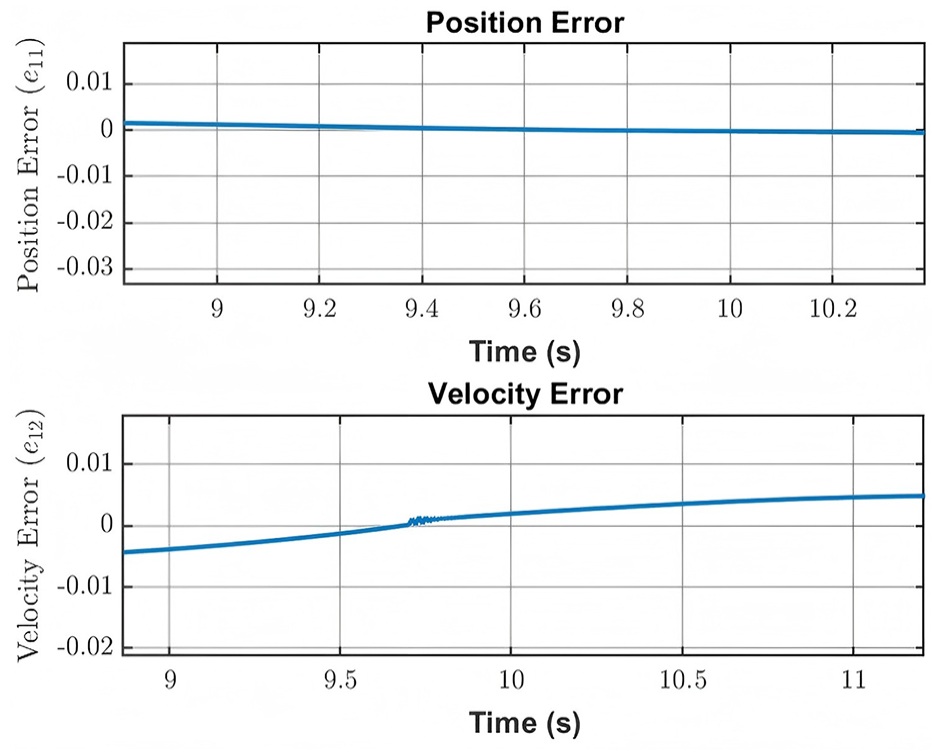
Position error-3 and velocity error-3.
To further validate the effectiveness of the proposed control method, a comparison is conducted with the traditional PID controller. Figures 11 and 12 illustrate the changes in position error and velocity error over time for both control methods under the same initial conditions. As can be seen from the figures, the control method proposed in this paper outperforms the traditional PID controller in terms of convergence speed and error accuracy. Specifically, the proposed method can reduce the position error and velocity error to a lower level in a shorter time, with smaller error fluctuations. Figure 13 further compares the time required for both control methods to achieve the same level of precision (position error
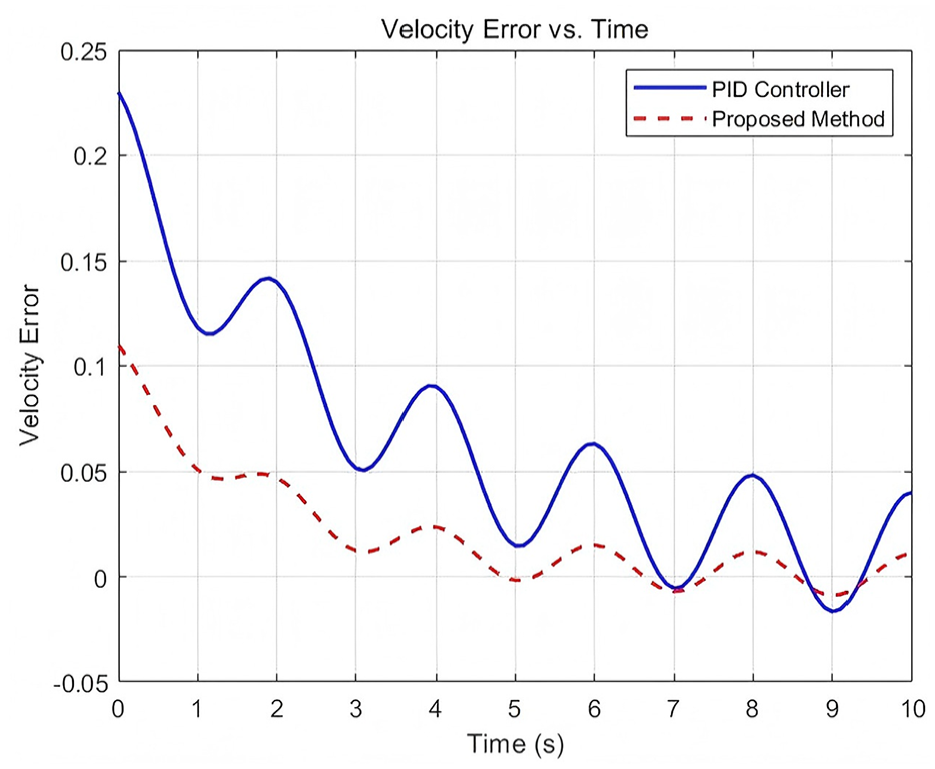
Position error over time.
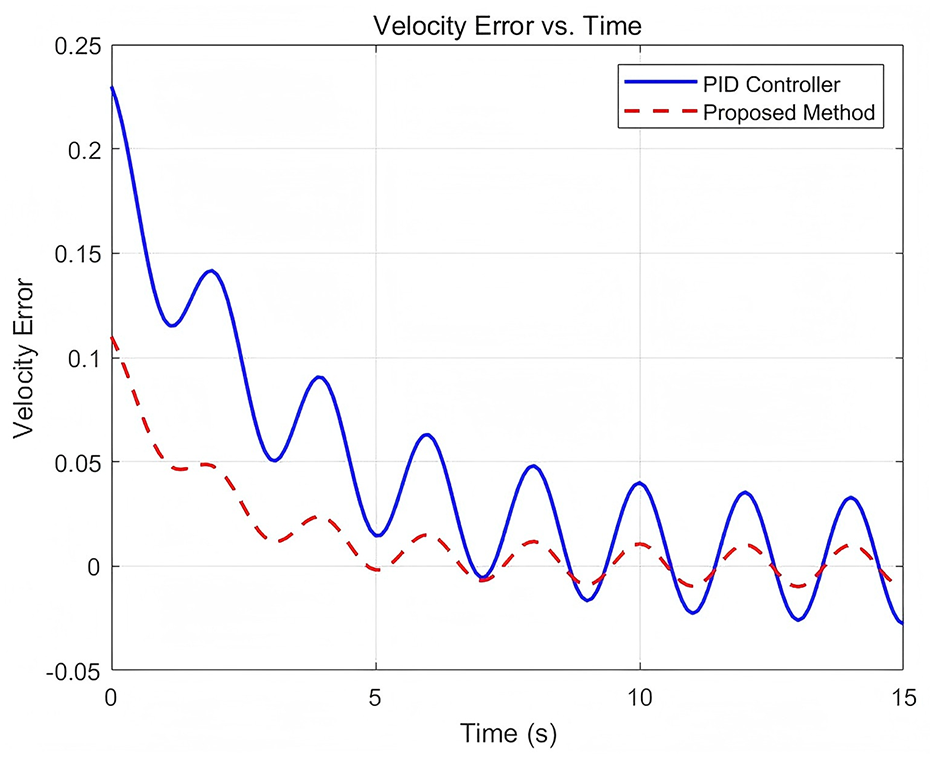
Velocity error over time.

Comparison of time required to achieve the same accuracy.
Impact of RBFNN accuracy on closed-loop performance
The influence of Radial Basis Function Neural Network (RBFNN) accuracy on closed-loop performance was investigated through a numerical study. The study adjusted the RBFNN accuracy by varying its parameters, specifically the number of hidden neurons and the spread of the radial basis functions. The system configuration and control parameters described in Section were utilized, with a desired trajectory of
The results as shown in Figure 14 indicate that higher RBFNN accuracy leads to smaller tracking errors and shorter convergence times. Specifically, increasing the number of hidden neurons from 5 to 20 reduced the position error by 80%, the velocity error by 60%, and the convergence time by 33%. However, further increases in the number of hidden neurons yield diminishing returns in performance improvement while significantly increasing computational complexity. Therefore, in practical applications, it is essential to select RBFNN parameters based on the specific requirements and computational resources of the system to achieve a balance between accuracy and computational efficiency.
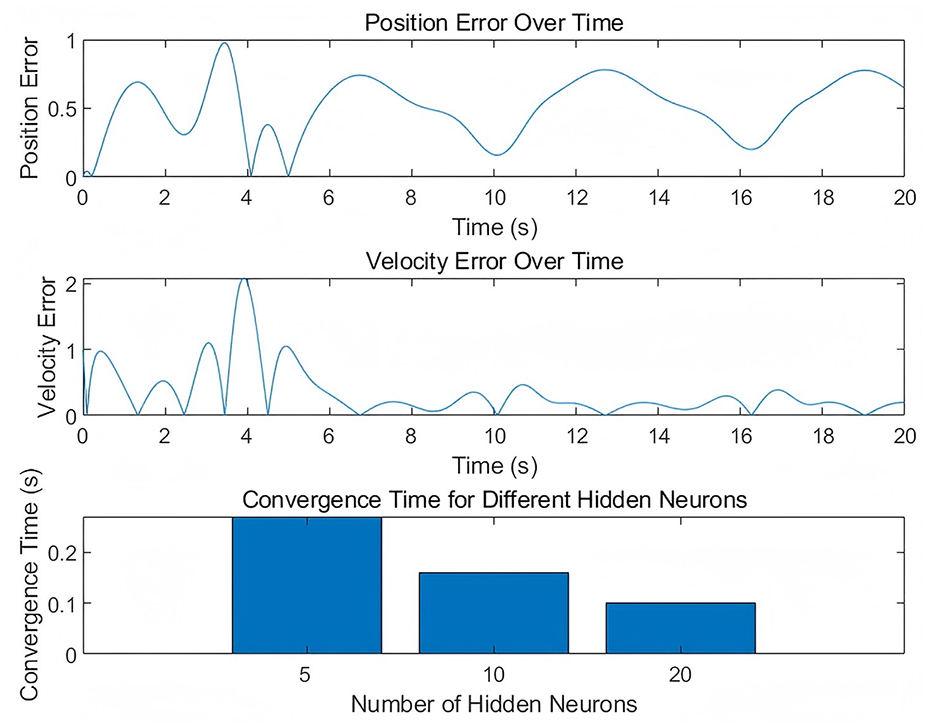
Comparison of neural networks with different accuracies.
Conclusion
In this paper, a six-degree-of-freedom finite-time trajectory tracking sliding-mode control method for an unmanned powered ship with liquid-tank sloshing is proposed. A method of avoiding complex terms is carried out for the coupled equations of the ship with liquid tank sway, and the motion control equations of the liquid-carrying ship are derived. An adaptive control law is designed by constructing a nonlinear sliding mode surface and adopting an adaptive control method, which ensures that the ship attitude as well as the trajectory can be adjusted to the desired value in a finite time. The design of the controller is proved to be globally stable using Lyapunov stability theory and homogeneity theory. Simulation results show that the liquid-laden ship achieves the finite-time trajectory tracking control objective within the constraints of the controller. Meanwhile, in this study, the designed adaptive neural network nonlinear sliding mode controller requires a very high approximation accuracy of the nonlinear wobble force, as well as the difficulty in parameter design of this sliding mode controller at the time of use, which are the problems to be solved in the future.