
Abstract
This paper mainly studies the stability of a sea cucumber adsorption robot (SCAR) under external disturbances and parameter uncertainty. As a fishing robot with a suction effect, a dynamic model of its vertical operation is established, taking into account the mechanical structure of its suction port and the surrounding flow conditions. Specifically, robust model predictive control (RMPC) is adopted to ensure that the device maintains excellent stability in complex underwater environments. Considering the simplification of the model structure and real-time control, a discrete nominal model with the introduction of a feedback correction mechanism is designed to be close to the actual system. In the process of control design, the upper bound of robot speed and propeller saturation have been taken into account, and the optimization functions to reduce input consumption of the propellers are also provided at the same time. Furthermore, the feasibility of the recursive structure and the stability of the closed-loop structure are proved. Importantly, the external factors including disturbance sources obtained from pool experiments are subjected to our consideration. In total, the simulation results and comparative analysis are evidenced by the practicality of the designed vehicle and the effectiveness of the established methodology.
Introduction
The oceans occupy Earth’s largest area of space, and scholars have never stopped exploring it. 1 As a flexible and efficient underwater device, the remotely operated vehicle (ROV) plays a crucial role in the exploration and development of marine resources. 2 With the development of science and technology, the use of underwater robots instead of manual fishing of bottom-seeded marine organisms has become a research hotspot in the field of fishery, with the most nutritious sea cucumber as the main one.3,4 Restricted by the characteristics of its living environment, it is necessary to require the sea cucumber adsorption robot (SCAR) have better stability and anti-disturbance. 5
Accurate dynamics models are established as the basis for the system design as well as key issues such as anti-disturbance control. 6 In Ref. 7 , the model of the designed fishing robot is established through dynamic analysis. However, the force situation of the robot system structure is not considered. Reference 8 adopts visual positioning-based target acquisition for suction and capture devices, and models them based on the feedback information, but the existence of delay errors cannot be ignored. Reference 9 has designed a new type of controller based on self-adjusting adaptive fuzzy logic, which can be modeled through fuzzy logic networks without accurately understanding system dynamics. However, the proposed controller requires speed measurement except for position measurements.
In addition, it is indispensable to realize the control of complex SCAR systems. As a classical control method, PID is widely used to combine with new control strategies. Reference 10 proposes an optimal bio-inspired PID controller to make vehicles robust to external disturbances. However, this offline control method only improves the stability of the system by adjusting parameters and reducing interference. Reference 11 combines radial basis function neural networks and adaptive control techniques into sliding mode control, making the system tracking error converge to zero in a finite time. Nevertheless, when the control trajectory of sliding membrane variable structure control reaches the vicinity of the sliding membrane surface, chattering often occurs, which increases the system adjustment time. References12,13 applies model model-free adaptive control method to ROV depth control, but due to the high computational cost, the nonlinear system model of the robot is replaced by a dynamic linearized time-varying model. A disturbance rejection based on an adaptive neural network controller is designed by Ref. 14 to control underwater robots with disturbance, but the selection of the controller parameters should be done very carefully. Otherwise, it may lead to an enormous higher value of the model uncertainties. 15
Although the above methods achieve motion control of the target object, it is still necessary to comprehensively consider the dynamically changing characteristics such as parameters perturbations and external disturbances that the system may be subjected to under different operating environments.16,17 Model predictive control (MPC) provides an online solution for optimal control strategies of MIMO-constrained systems such as underwater robots. 18 It relies heavily on the controlled system model to predict future states, which makes it vulnerable to unknown external disturbances and modeling errors. 19 Large external disturbances and model uncertainties can reduce or even destabilize the controlled system. 20 Therefore, it is crucial to adopt a robust control method with strong robustness to deal with the effects of coupled nonlinearities in the control model of the underwater vehicle as well as the system’s own immunity to disturbances.
In summary, since the suction and capture mechanism of SCAR is the key mechanism to achieve the acquisition and delivery of sea cucumbers, combining its working principle and structural design, establishing a dynamic model with realistic and high capture rate is the main challenge. In addition, based on the fact that SCAR operates in a complex underwater environment, as well as the nonlinearity and high motion redundancy of the system model, it is also one of the difficulties to realize the problem of anti-disturbance under limited control inputs and state constraints.
To address the above challenges, this paper establishes a mathematical model to describe the system behavior based on the dynamic characteristics of SCAR, which is tailored to its own structure. The designed robust model predictive control (RMPC) method calculates the state change of the system in the future time through the measured value of the system state at the current moment and the estimated value of the control input. Optimization of the control inputs is achieved and a control strategy is implemented to regulate the behavior of the system. Finally, the sequence of control inputs is continuously and iteratively updated to adapt to the dynamic changes and external perturbations of the system. Specifically, the excellent contributions in this work can be written as:
Innovatively, an open-shelf sea cucumber adsorption robot (SCAR) with a capture function is designed, and based on that the system dynamics and kinematics model are established. Besides, the mechanical structure model of the robot suction and trap structure are considered, as well as the force analysis is conducted. This makes the model of the entire SCAR system more accurate and improves control accuracy.
External disturbances and parameter uncertainties are introduced into the system model and controlled by RMPC to achieve better results. Additionally, the system input and state constraints to achieve as little energy consumption as possible are considered.
The pool experiment obtained disturbance data under real operating conditions, the feasibility and effectiveness of RMPC are verified on this basis. The results demonstrate that the overshoot of RMRC is reduced by
The rest of the paper is organized as follows: The dynamic model of the SCAR system as well as the kinematic model are introduced, taking into account the structural model of system uptake. The design approach of RMPC and the analysis of its feasibility and stability are described. Finally, the simulation results are confirmed and the paper is summarized.
Establishment and analysis of SCAR mathematical model
When the SCAR moves underwater, it will be disturbed by the external marine environment in addition to its complex nonlinearity and the mutual coupling between degrees of freedom. 21 These factors will act on the robot’s body, have a certain impact on its motion posture, and position, resulting in lower underwater motion performance and fishing efficiency. Therefore, it is necessary to further explore the movement law of the robot under the influence of external forces through mathematical models. 22 And further lay the foundation for the control research on the stability of system in the following paper.
Kinematic model
In order to analyze the motion attitude and anti-disturbance capability of the SCAR, a coordinate system is established to describe the robot’s motion based on this. According to the system recommended by the International Towing Tank Conference (ITTC) and the Society of Naval Architects and Marine Engineers (SNAME), 23 the paper establishes the relevant coordinate system as shown in Figure 1.
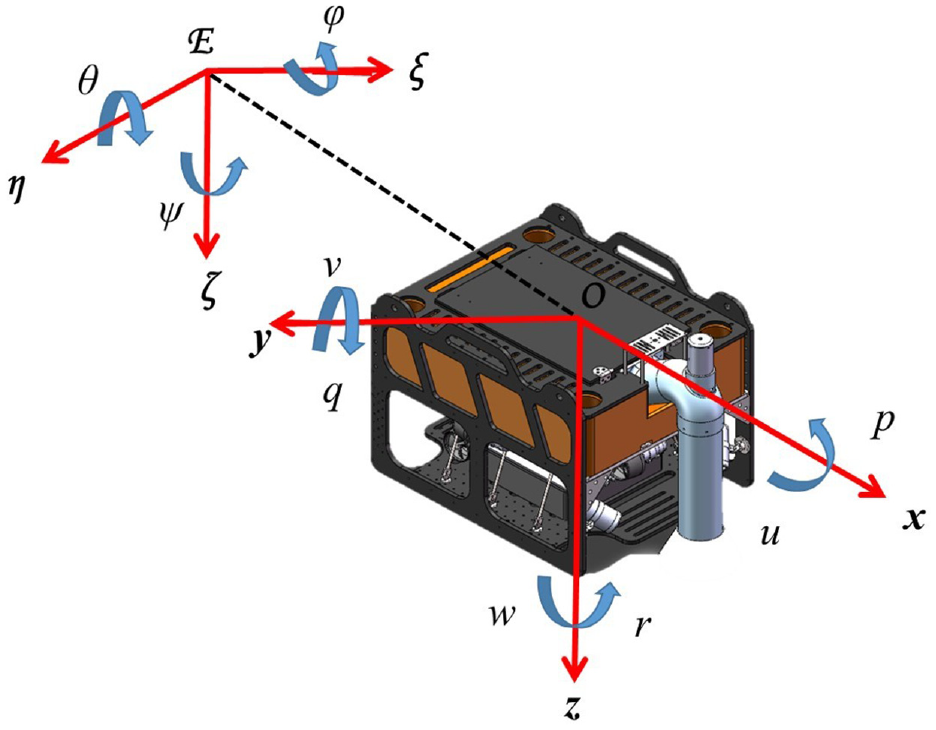
The overall structure of the SCAR with corresponding coordinates.
According to the right-hand rule, two kinds of coordinates are established: One is a fixed coordinate system
The linear velocity and angular velocity of the origin
The SCAR has certain linear and angular velocities relative to the fixed coordinate system during the motion, and the spatial position of the SCAR depends on the three coordinate components of the origin
Similarly, according to the relationship between Euler angular velocity and the angular velocity of SCAR motion coordinate system, the angular velocity conversion matrix can be obtained. Through coordinate transformation, the specific coordinate transformation relationship between the angular velocity in the SCAR motion coordinate system and the fixed coordinate system is obtained as follows:

Dynamic model and force analysis
Due to SCAR is a complex nonlinear system, we calculate the relationship between its expected motion and the force exerted by the actuator is calculated through the dynamic model of the robot. This paper considers the mathematical model of the structure and hydrodynamic complexity of the suction and capture device, effectively coupling the components of the underwater suction and capture device, making it a unified system.
According to the Refs.24,25, the underwater robot motion is a 6-DOF space motion. The spatial motion can be represented by linear motion and rotational motion of three coordinate axes (
In addition to the physical meaning of the parameters mentioned above,
The force and moment of each part on the left side of the (3) are analyzed, mainly including the static force (moment) generated by the combined action of gravity
Due to the attitude stability of its suction and capture process is mainly studied in this paper. Therefore, the vertical thruster (

where

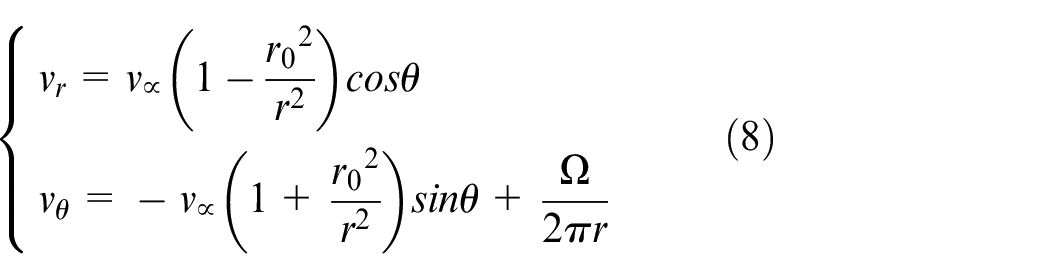
For the SCAR in this paper, in addition to the mechanical structure of the conventional underwater robot. It is also necessary to study the motion of the whole robot by analyzing the mechanics of its suction and capture device. As the suction and capture port is a cylindrical structure when the current flows through it, there will be different flow separation phenomena on its surface. 29 The flow separation will not only increase the resistance of the cylinder but also interfere with the flow separation behind different cylinders, which will affect the vortex shedding period and the transverse pulsating load generated in the wake. 30 This paper considers the relationship between the force and the system state vector under the horizontal and vertical forces respectively. The main flow around SCAR is shown in Figure 2.
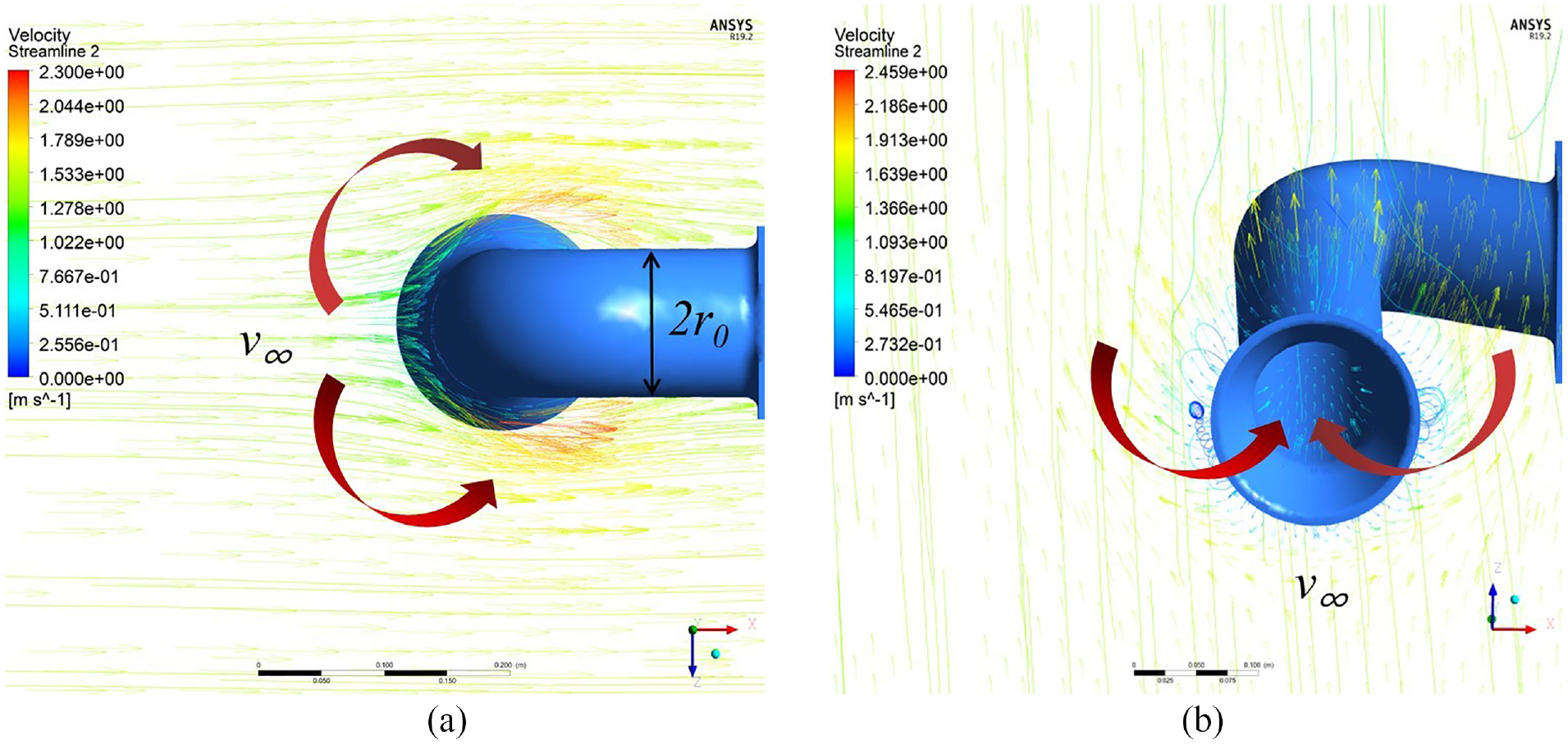
Velocity cloud of incoming flow around the ROV suction trap in the corresponding horizontal and vertical direction, respectively: (a) horizontal direction and (b) vertical direction.
Here, the inflow velocity of the robot is 3 knot, 1.5 m/s in total. It can be seen from the above figure that the rear part of the suction trap is connected to the robot body, which makes the fluid asymmetric when passing. In this case, the flow around a circular cylinder belongs to the flow around a circular cylinder. It is mainly composed of uniform flow, dipole flow, and point vortex, and the superimposed complex potential at

where

The partial derivative of the real part of
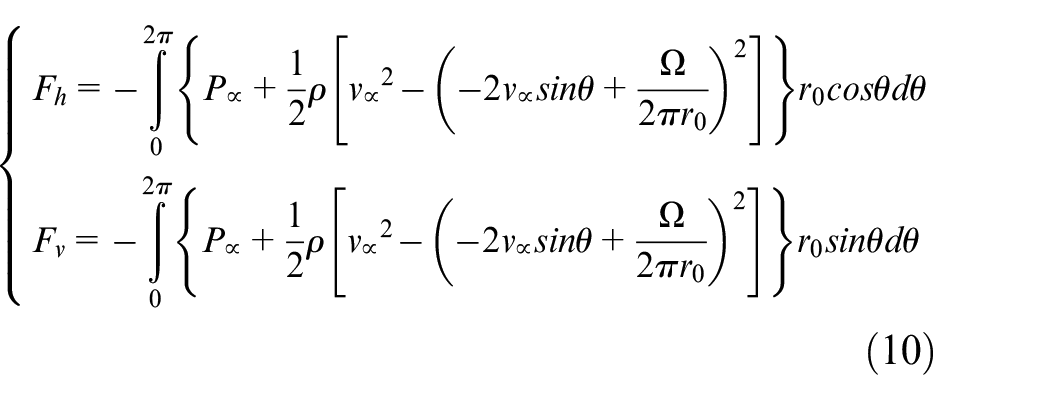
By listing the Bernoulli Equation at infinity and at a point on the cylindrical surface of the suction trap, we can get:

The pressure distribution
System model
Regardless of the roll of the device, we can obtain the longitudinal and vertical dynamic equations of the SCAR in the
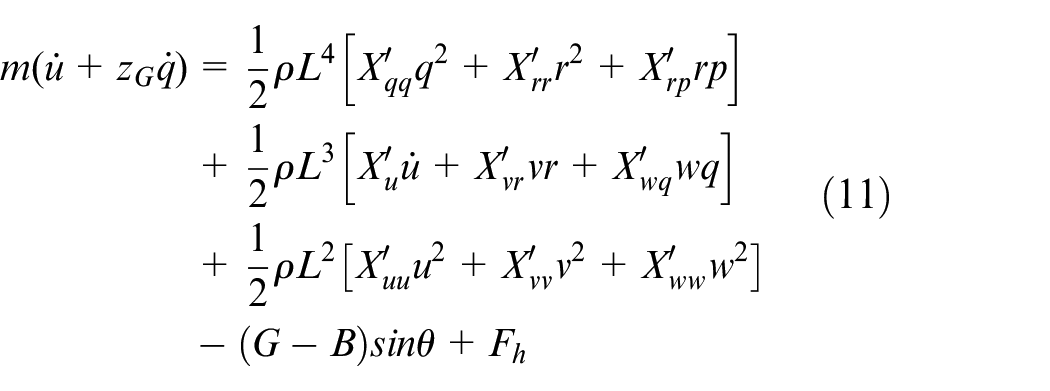
and
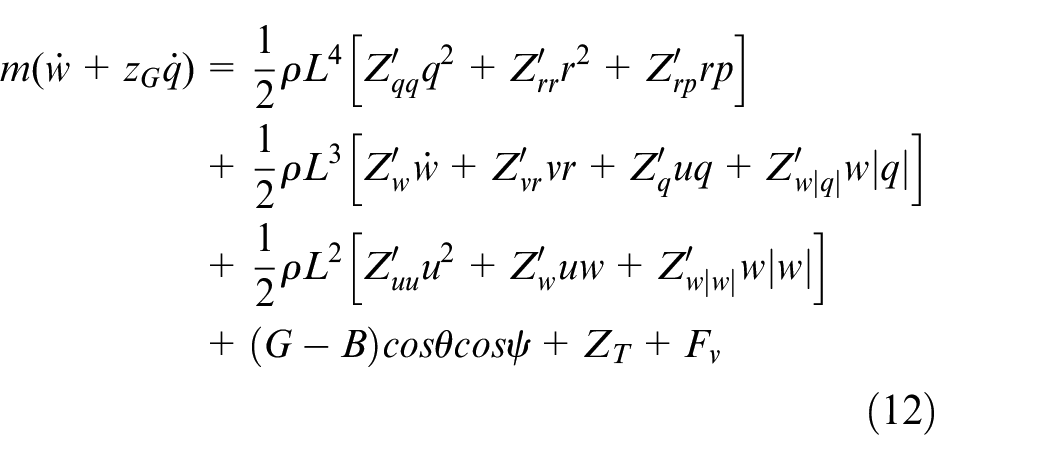
This research focuses on the control of the robot’s longitudinal suction process, so there is still a certain steering movement in the system. We decompose space motion into horizontal plane motion and vertical plane motion. The center of gravity
Since the SCAR is moving vertically downward at a uniform velocity after deployment and before preparation, the cross-coupling terms and smaller hydrodynamic parameters of the horizontal and vertical degrees of freedom can be neglected. Depending on the layout of the robot’s thrusters, the control produces negligible residual angular velocities when the speed of the thrusters is not too fast. Finally, the (11), (12) and (13) can be written in the following discrete form:

where
with
In normal operation, the system can ignore all non-vertical parameters coupling and variables, so as to achieve the control effect of small errors. However, in the complex marine environment and the state of frequent flow around, the system stability may be affected. For this reason, we have to consider the uncertainties, nonlinear terms, and other factors in the system. In addition, this paper also adds the relevant underwater disturbance term
Design and analysis of RMPC
Owing to the special characteristics of the operation mode and working environment of the device designed in this study, in order to be able to control its smooth operation more accurately. In this section, a RMPC method based on the system architecture is adopted and the corresponding controller is designed. Ultimately, the integration of the control method with SCAR is realized and the robustness of the system against internal uncertainties and external disturbances is improved.
Method
For system (14), due to the nature of the underwater work of the SCAR, the interference in the form of external currents should be taken into account, and we give the effect
where

Furthermore, we consider that several common underwater tasks (e.g. fixed-point adsorption and underwater detection) require the SCAR to move relatively slowly. Under these circumstances, the velocity vector generated by the thrusters can therefore be set as

Similarly, for the force or moment


where we obtain, based on the above constraints,
It is not difficult to realize that (16) is the actual dynamical equation of the system, which contains the parameter uptake inside the system as well as the vector of perturbations to which it is subjected externally. Therefore, we consider (14) as a nominal model of the system, where no disturbances are taken into account, and transform it into a more general form, denoted as:

with

where
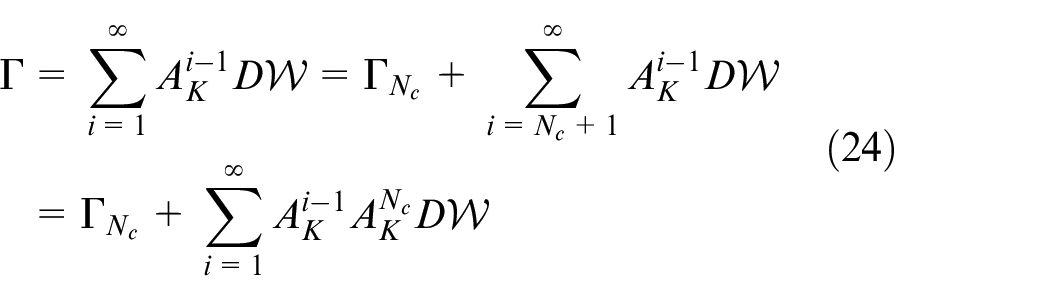
For the nominal system (19), consideration of optimization problem is usually used to solve the problem of adjusting the current and future input of the system to minimize the predicted performance cost.
31
Thus, the cost function
where

s.t.

where
As for this contractive constraint, based on the parameters in the state space of the system and combined with the conditions to ensure the stability of SCAR,
where
The nominal model is implemented in a receding horizon scheme, at time
Stability and feasibility analysis
The previous section indirectly realizes the optimal cost function and closed-loop stability of the ROV system by designing the nominal model. Here, we consider the error relationship between the real and the nominal system, then design the control law to ensure system stability, and verify method feasibility. The control law behind it is:

where
According to the (25) designed in this paper, the D-value between the actual and the nominal system is obtained. At this point, defining the error as:

the meaning of specific parameters has been mentioned above. Due to the fact that
In the previous description, we have set the initial condition as

Since

where
Since

and the terminal
Results
In this section, pool experiments are designed to obtain real disturbance sources to validate the reliability of the method and device. Lots of simulations are also performed to verify the feasibility and effectiveness of the RMPC method for SCAR’s stabilization control.
Hardware platform and experiment preparation
The self-developed SCAR adopts a portable and expandable modular structure, with a volume of about
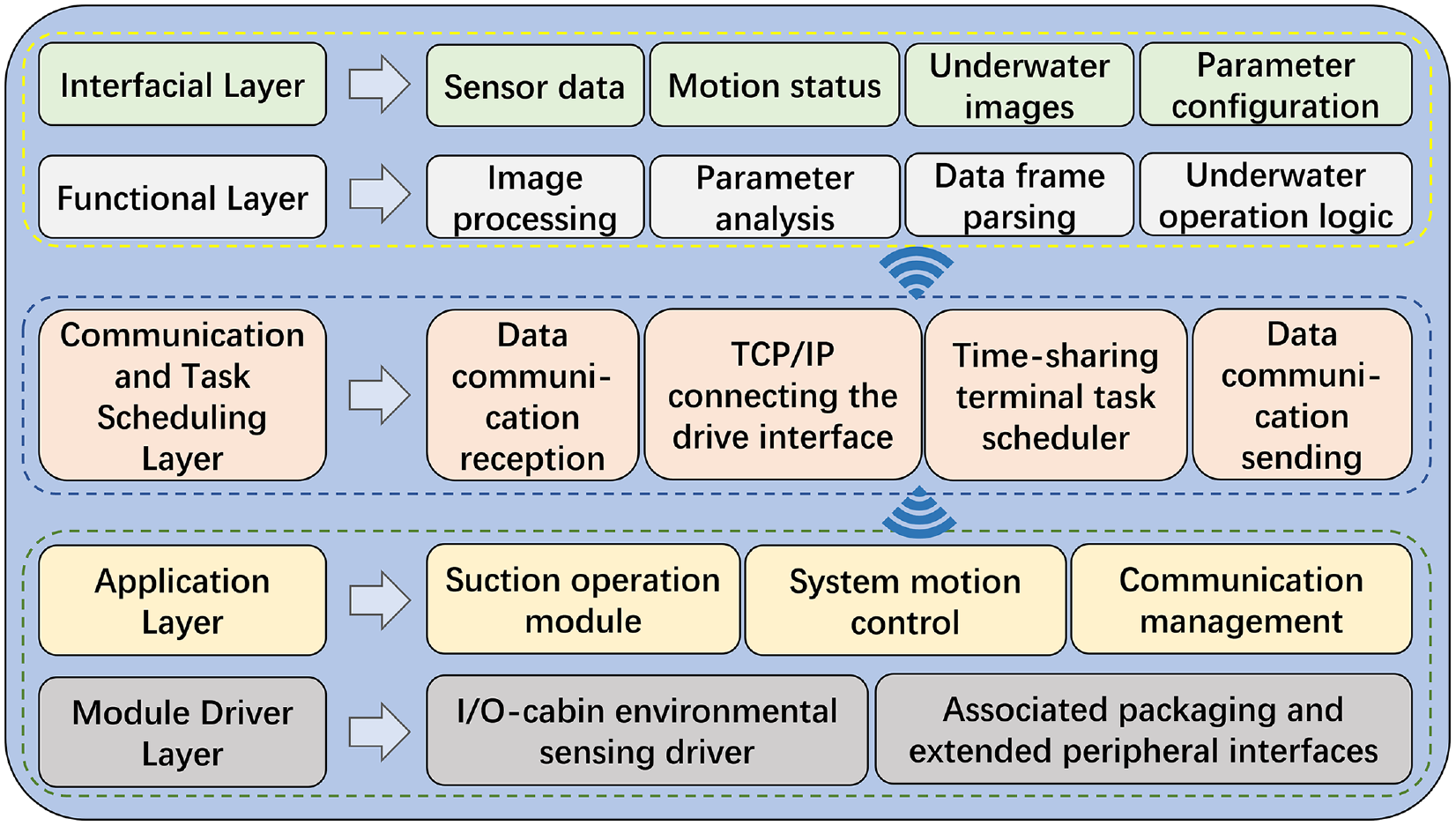
System block diagram of SCAR.
According to the different lengths of the suction objects and the effective water flow rate, the inner radius of the suction pipe
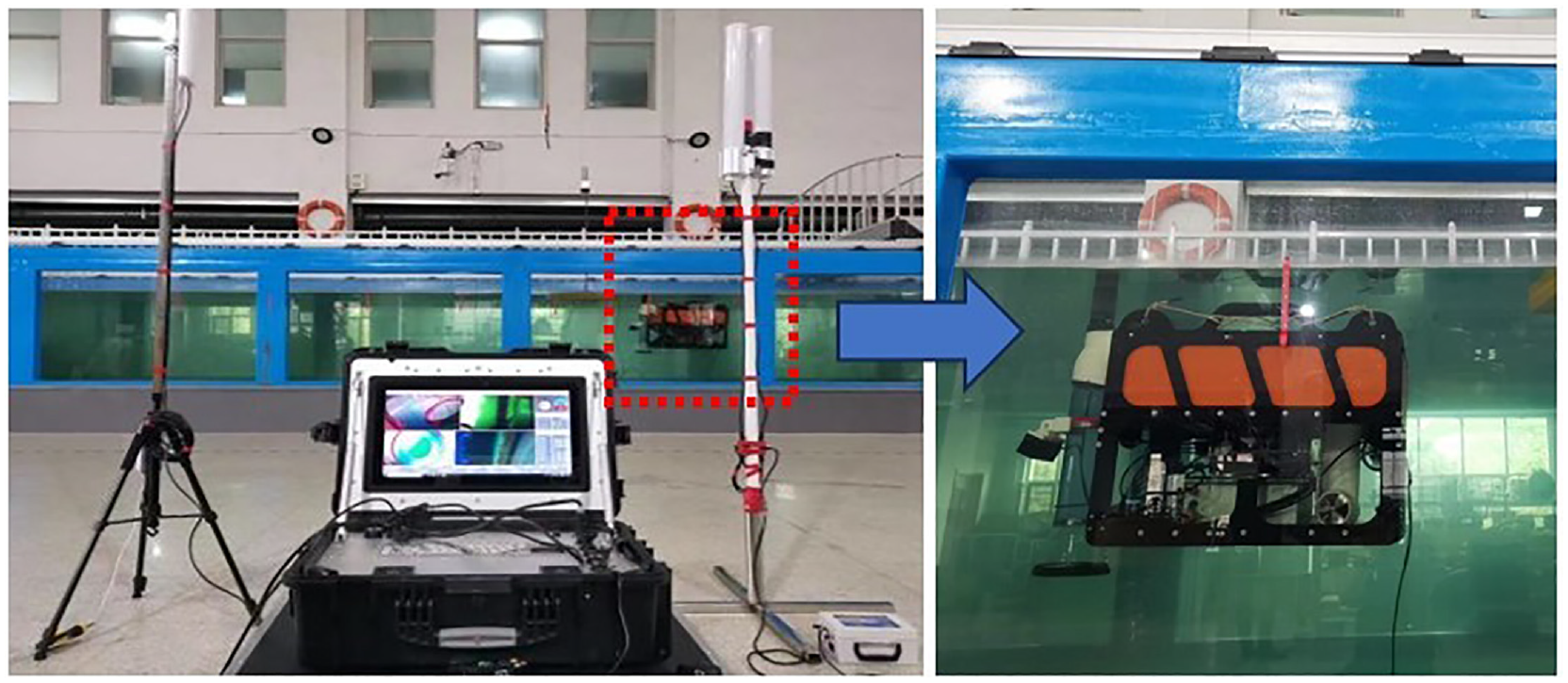
Overall schematic diagram of the operating platforms and experimental equipment.
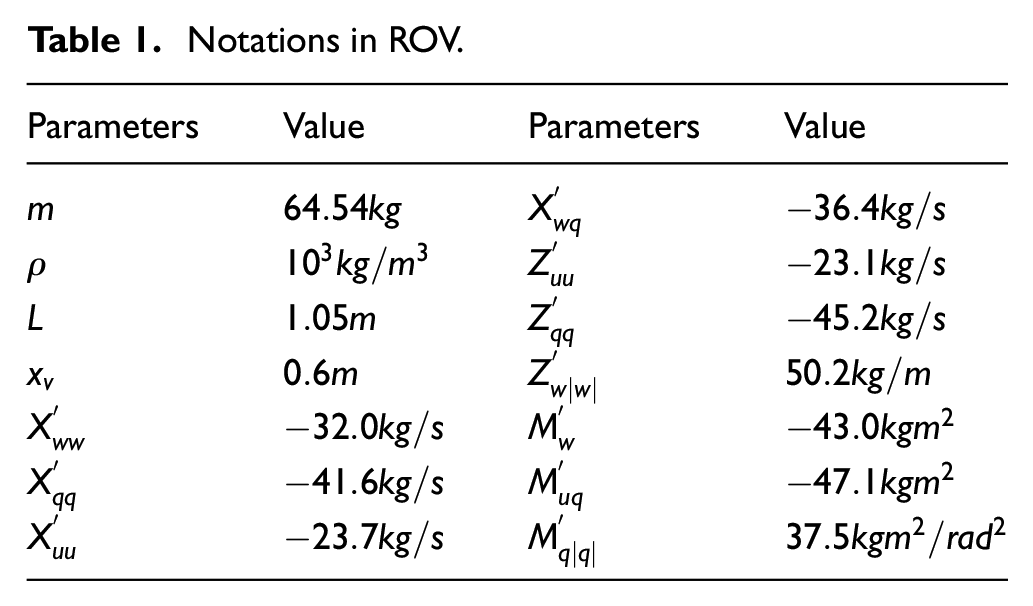
All the simulations were completed on a computer equipped with Intel Core i7-8th Gen dual-core processor. The hydrodynamic analysis and system simulation were developed and simulated on ANSYS 2019.2 and Matlab R2022a. In addition, some control parameters selected in this paper are for the purpose of achieving an acceptable performance level, but not necessarily the optimal parameters. The specific parameters and values are shown in Table 1. Among them, the inertial hydrodynamic and viscous hydrodynamic parameters are the fitted hydrodynamic parameter values obtained by the SCAR system by performing translational and rotational movements in the simulation environment, so as to ensure the authenticity and validity of the parameters.
Notations in ROV.
Obtaining disturbance source experiments
For the traditional methods of disturbance acquisition, scholars generally take the approach of approximate estimation or hypothetical conjecture. To approximate the simulations of external disturbances and fit the SCAR system model, this paper has carried out several underwater experiments in a pool with a volume of
A fixed-frequency control signal is provided to stimulate the vehicle to perform a complete cycle of suction and capture action. No manual commands or remote control operations are used to ensure data accuracy;
Recording the vehicle’s I/O signals and generating a data matrix including timestamps, input signals and pitch;
Performing the same test several times in succession to ensure data reliability;
Collating and optimizing the data to derive multiple counts of the entire process of the SCAR from the start of suction and capture to the end of calming.
Since the size of the disturbance formation is also mainly based on the change of pitch angle at the end of the trapping process. Therefore, the disturbance as a whole showed an oscillatory decay state. A total of
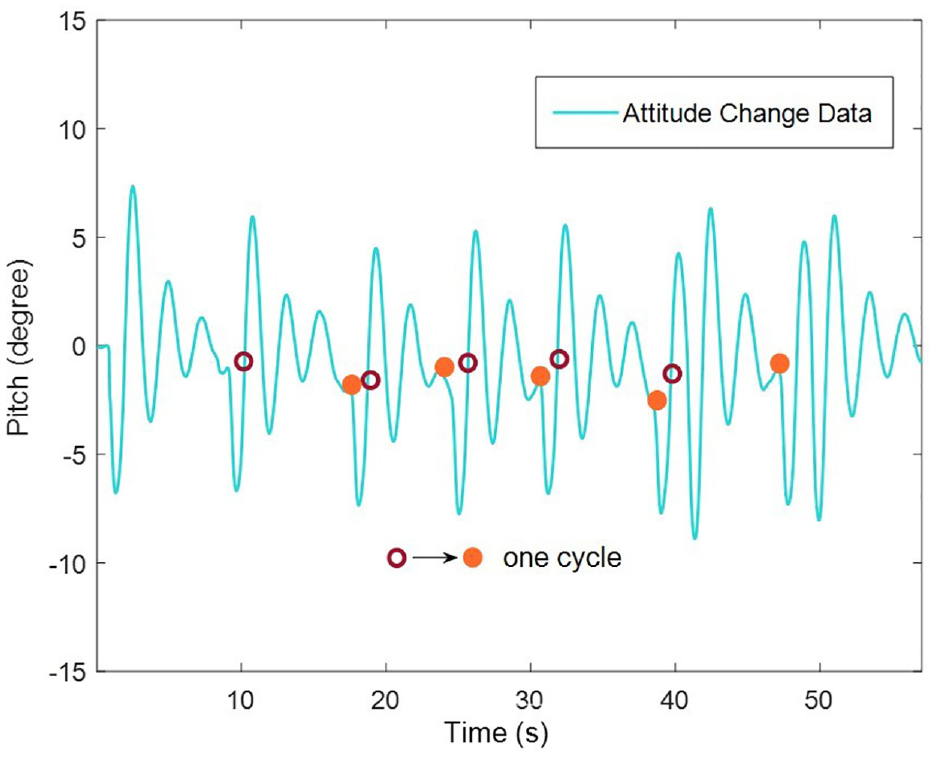
Variation of the disturbance to SCAR in a pool experiment.
Comparative analysis of simulation experiments
In order not to lose the generality of the anti-disturbance effect, we first select the common sinusoidal attenuation function to represent the ocean wave disturbance as the disturbance
Figure 6(a) shows the system response curve under different control methods. In each plot, the blue curve and The dark pink curve show the change of the pitch of the SCAR through the backstepping control (BSC); the green curve is the model prediction control (MPC) method; the blue curve is the SCAR’s attitude change with the robust model prediction control (RMPC), and the red curve is the desired moving pose. It is clear that each control method achieve steady-state control under this disturbance.
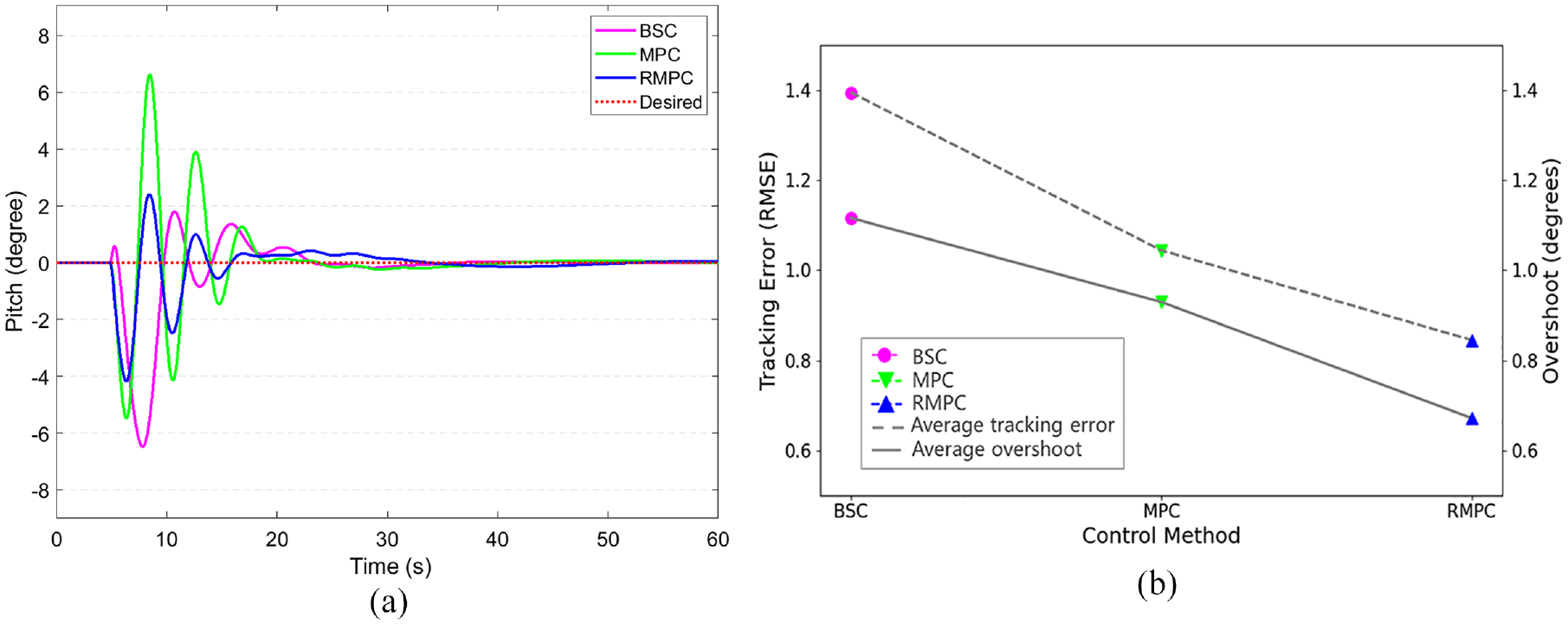
Stable tracking of SCAR system under sinusoidal perturbation with different control methods and performance metrics: (a) comparison diagram of system state response curves under sinusoidal attenuation signal perturbation and (b) comparison of the average tracking error and overshoot of the system under different methods.
In this case, RMPC shows excellent robust to make the adjustment process smoother even it leads to a longer adjustment time of about
In addition to the system immunity, for the robot’s input, the weight selection of
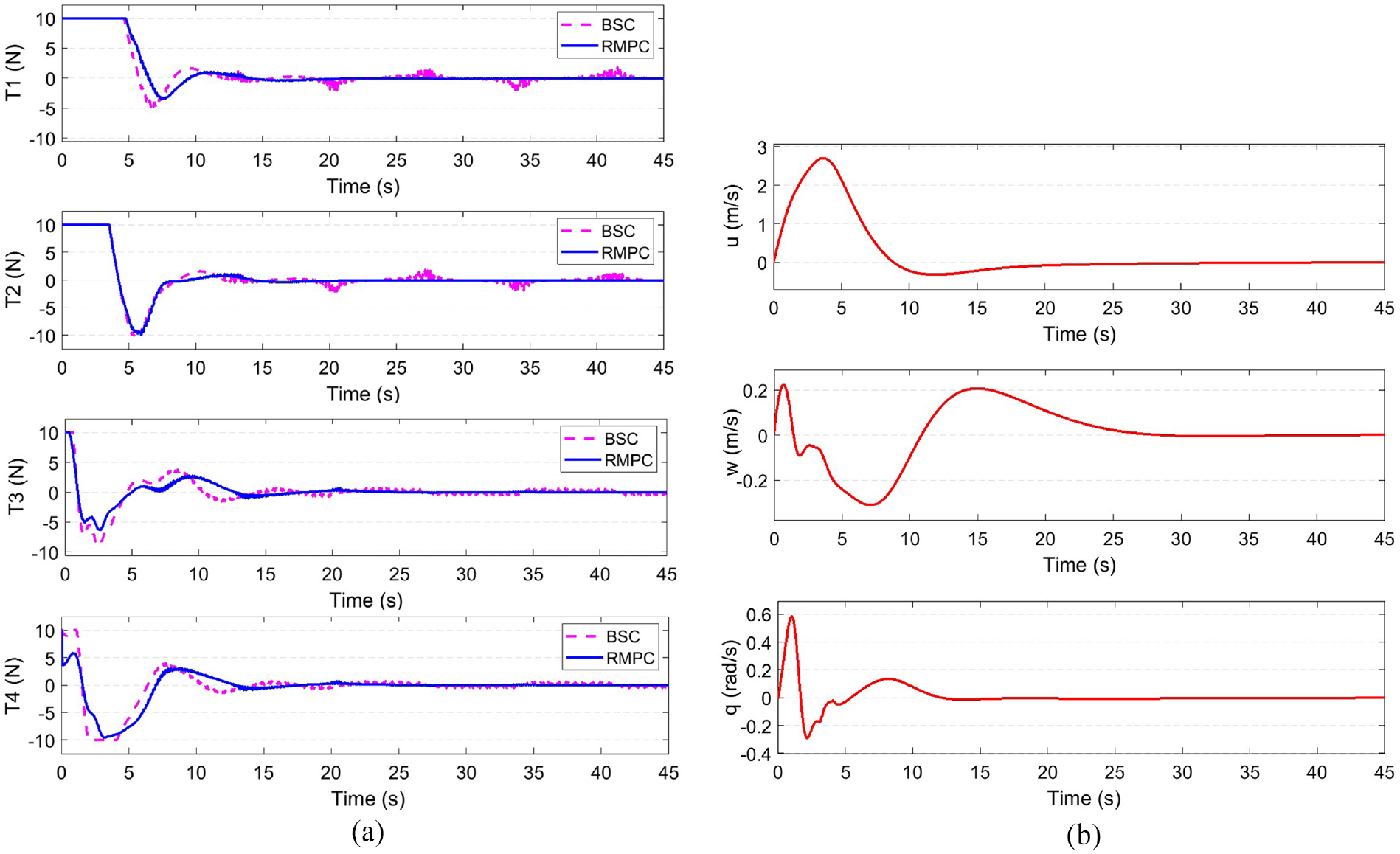
Variation of control parameters associated with SCAR under sinusoidal perturbation: (a) the control command for each vertical propeller and (b) state variable response curve.
The RMPC controller responds to more aggressive actions than the BSC controller to obtain the fastest convergence when the thruster starts to work. This is due to the fact that BSC can not make full use of on-board thrust capability with fixed control gain. In addition, the results that the oscillation of RMPC is weaker than that of BSC also evidenced the advantages. As expected, all control commands are kept within the allowable range.
After verifying the feasibility of the method, we then select one cycle of vibration from the above-acquired disturbance source as
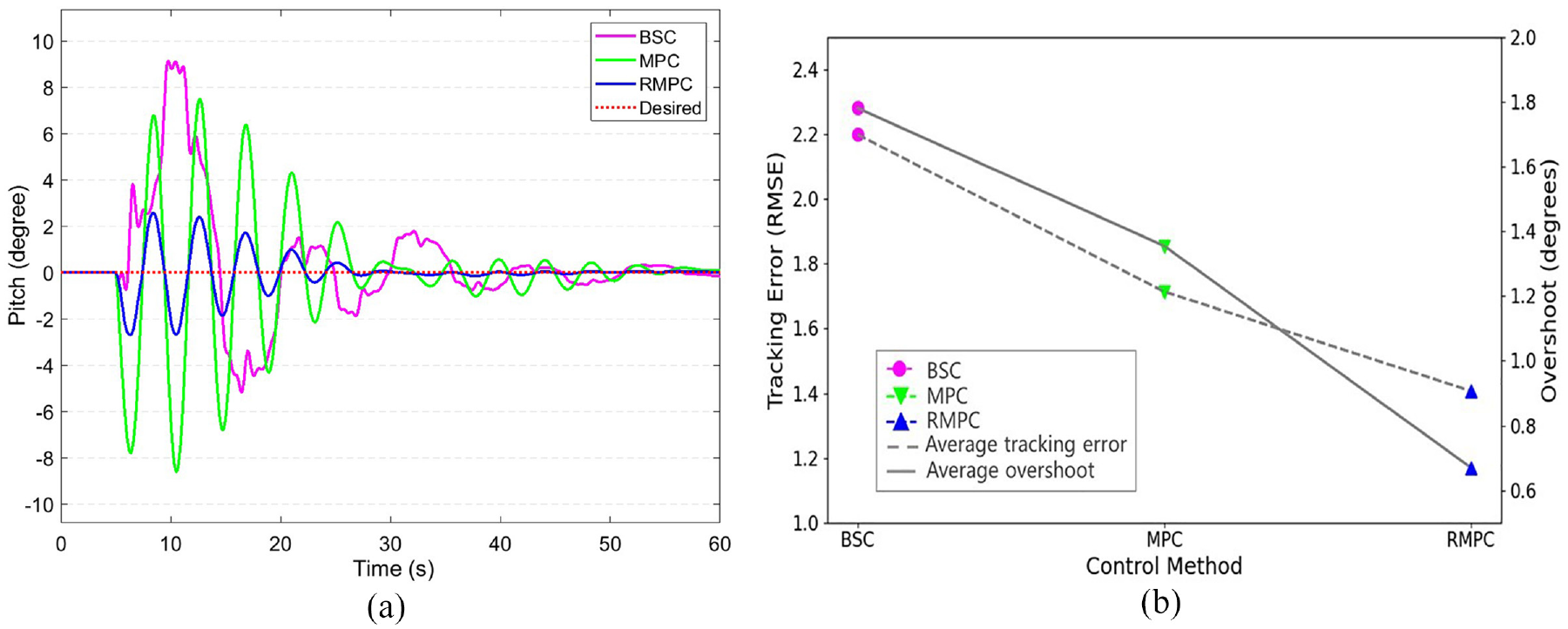
Stable tracking of SCAR system under disturbance source in pool test with different control methods and performance metrics: (a) comparison diagram of system state response curves under disturbance source in pool test and (b) comparison of the average tracking error and overshoot of the system under different methods.
Despite the irregular decay of the real disturbances and the parameters perturbation, each method is able to fluctuate within a one a smaller angle (about
The changes that occur in each thruster under the desired input constraints and the respective state responses can be observed in Figure 9(a), The adjustment time and energy consumption of RMPC are clearly less than that of BSC. At this time, each state variable of the system can be seen in Figure 9(b).
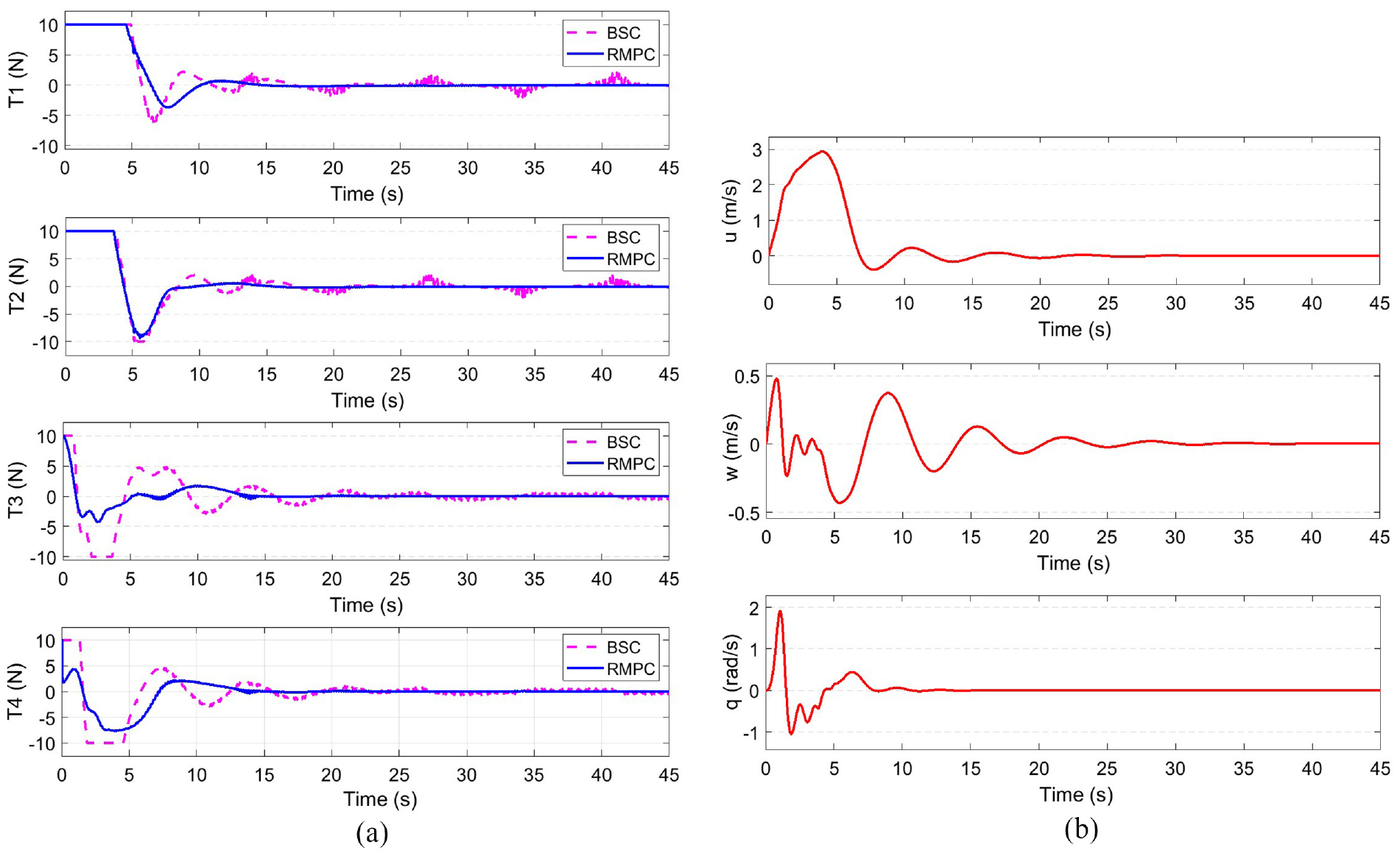
Variation of control parameters associated with SCAR under sinusoidal perturbation: (a) the control command for each vertical propeller and (b) state variable response curve.
The results show that when the SCAR starts working and the external disturbance conditions are the same, the system response time of RMPC can be
Conclusion
In this paper, a practical underwater device is designed for the main purpose of catching sea cucumbers, and the vertical stability of the system is controlled during operation to eventually achieve a smaller pitch angle variation. Firstly, a matching model based on the specificity of the system is established. Combined with the structure of the SCAR’s suction and capture ports and the characteristics of the water flow, it ensures a more accurate description of the system’s motion state. In addition, compared with the traditional control strategy, the RMPC method used in this system has the advantage of stability. A nominal model design method and cost functions optimization are used to constrain the inputs and states of the SCAR to ensure minimum energy loss. The disturbances and uncertainties in the system are described by the sources of disturbances in the pool experiments, external factors (e.g. self-designed disturbance states), and uncertain parameters. Finally, the effectiveness and robustness of the method are evidenced by a large number of simulation results coupling with comparing and analyzing multiple methods. However, RMPC requires high computational resources as it needs to perform the optimization solution in each sampling cycle. The computational complexity of the controller is further increased especially if the prediction horizon
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Fundamental Research Funds for the National Natural Science Foundation of China (Grant No. 51909252).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.