
Abstract
As industrial robots are characterized by flexibility, load variation, and unknown interference, it is necessary to develop a control strategy with strong robustness and adaptability, fast convergence rate, and simple structure. Sliding mode control is a special method widely used to handle nonlinear robot control. However, the existing control law for sliding mode control has limitations in the chattering and convergence rate. The sliding mode manifold and reaching law are firstly discussed in this article. In the meanwhile, a proposed control law for sliding mode control combining linear sliding mode manifold and double-power reaching law is developed, which is based on the robot dynamic equation derived by the Udwadia–Kalaba theory. Furthermore, a compared control law for sliding mode control combining linear sliding mode manifold with exponential reaching law is presented to test the proposed control law for sliding mode control. The comparison indicates that the proposed law effectively improves the performance in convergence rate and the chattering of constraint tracking control. Finally, the two control laws for sliding mode control are applied to the Selective Compliance Articulated Robot Arm robot system with modeling error and uncertain external disturbance to demonstrate the merit and validation of the proposed scheme.
Introduction
The purpose of constraint tracking control for industrial robots is to make the position, velocity, and other state variables of the robot track the desired trajectory by giving the driving torque of each joint. To make the industrial robot follow the given reference trajectory accurately, each joint of the robot must be precisely controlled. 1 Industrial robots have the characteristics of flexibility, load change, and unknown disturbance, so it is necessary to develop a control strategy with strong robustness and adaptability, fast convergence rate, and simple structure. 2 Multifarious robust control technologies have been employed, such as proportional–integral–derivative (PID) control, 3,4 neural network control, 5 fuzzy logic control, 6 sliding mode control (SMC), 7 and a combination of SMC and PID control. 8
As a special nonlinear control method, SMC is widely used in robot control. 9 –12 However, the robustness of SMC exists only in the sliding mode, and the system is still affected by uncertainty and external disturbance in the reaching mode. The chattering phenomenon will increase energy consumption, and it is easy to excite unmodeled high-frequency dynamics that lead to system instability. The boundary layer method 13 can reduce the chattering effectively, but the system can only achieve uniformly bounded stability and the control accuracy is reduced. High-order SMC 14 and dynamic SMC 15 can avoid chattering, but it is not suitable for first-order systems and not easy to obtain high-order derivative signals of sliding mode variables. Terminal sliding mode 16 can ensure finite-time convergence; however, the convergence rate is slow and the singularity phenomena do exist. Fast terminal sliding mode 17 can provide a faster convergence rate but not consider to solve the singularity phenomenon in the design. Nonsingular terminal sliding mode 18,19 can solve the singularity problem but has a slow convergence rate. However, the proposed nonsingular fast terminal slide mode (NFTSM) 20,21 cannot improve the robustness and eliminate the chattering. A combination of the properties of PID and NFTSM can improve the robustness of the system, nevertheless may increase the system complexity, thus increasing the difficulty of reconstructing a control law. 22 The SMC law determined by the reaching law can improve the performance of a robot system significantly, such as the dynamic quality of the reaching process, robustness, and chattering reduction. 23 The exponential reaching law 24 converges fast, but the chattering is serious when reaching the sliding mode stage. The power reaching law 25 can weaken chattering but converges slowly especially when the system state is far from the sliding mode manifold. The double-power reaching law 23,26 eliminates the inherent chattering of the traditional sliding mode and has a convergence speed advantage especially when the initial error is large.
Obtaining the explicit dynamics model of the robot is important for achieving a motion control of high quality. Compared with the classical dynamic modeling methods, the Udwadia–Kalaba (U-K) theory 27 has the advantage that it can completely describe the explicit dynamic equations of the constraint multibody system with holonomic or nonholonomic constraints and independent or nonindependent constraints without the need of auxiliary variables. The research of robot dynamics modeling and control based on the U-K theory has attracted more and more attention. 28,29
This article aims to propose a control law for SMC, which can realize the constraint tracking control of industrial robots. Therefore, the law based on the dynamic equation established by the U-K theory is studied to reduce the chattering and improve the convergence rate. Consequently, the rest of this article will be organized as follows. The sliding mode manifold and reaching law are firstly discussed. Then the proposed control law for SMC combining linear sliding mode manifold and double-power reaching law is designed. Furthermore, the compared control law for SMC combining linear sliding mode manifold with exponential reaching law is also used to compare with the proposed law. Finally, simulation analyses and comparisons of the two control laws for SMC are carried out by taking the Selective Compliance Articulated Robot Arm (SCARA) robot as an example.
SMC method
Corresponding to the two stages of SMC system motion, the design of SMC law is mainly divided into two steps: the creation of appropriate sliding mode manifold and the design of reaching law.
Sliding mode manifold
The nonlinear system is described as follows

where
The switching surface function of the system state is

The input function of the system control is

where
Linear sliding mode manifold is

where
Reaching law
Reaching velocity from the initial position to the sliding mode manifold of the system for the double-power reaching law is

where the dynamic quality is guaranteed by
In conclusion, the expression
Proposed control law for SMC
The dynamic model on the basis of the U-K theory is

where
The input variable, that is, the tracking error, is introduced as follows

where

The double-power reaching law is

Then the control law is

where

The new control law expression is substituted into the expression of

Suppose that

In the light of the Lyapunov function, the subsequent equation can be obtained as follows

According to the accessibility conditions that the control design should meet,
Given by

then

The actual control law is

According to Eq. (17), the switching is more serious and the chattering is stronger when the difference between upper and lower bounds is larger, that is, the value of
Similarly, the compared control law for SMC combining linear sliding mode manifold and exponential reaching law is expressed as follows

where the constants
Simulation and result analysis
General SCARA robot is taken as an example for practical verification of proposed SMC control methods, and the end point P of the SCARA robot is set as the research object. xSy is the global coordinate system, as shown in Figure 1, where qi
is the generalized position, li
is the length of the ith link, Ci
is the center of mass coordinate of the ith link,

Schematic diagram of the SCARA robot subject to constraint. SCARA: Selective Compliance Articulated Robot Arm.
For the SCARA robot, the inertia matrix can be obtained as follows

where
The Coriolis matrix can be derived as follows
The gravitational force is expressed as follows

The expected trace trajectory is given as follows

As illustrated in Table 1, the physical parameters of the SCARA robot include mi
, li
, and
The simulation parameters of the SCARA robot.

SCARA: Selective Compliance Articulated Robot Arm.
To prove the advantages of the proposed control law for SMC, the compared control law for SMC is also applied to the SCARA robot under different trajectories. The simulation results are illustrated in Figures 2 to 6, in which (a) and (b) are the results under trajectory 1 (i.e. Tr-1) and (c) and (d) are the results under trajectory 2 (i.e. Tr-2). The parameters of the Tr-2 are not elaborated.

Position tracking of SCARA robot individual joints (generalized variables q 1 to q 4) (a) obtained by the compared control law for SMC (Tr-1), (b) obtained by the proposed control law for SMC (Tr-1), (c) obtained by the compared control law for SMC (Tr-2), and (d) obtained by the proposed control law for SMC (Tr-2). SCARA: Selective Compliance Articulated Robot Arm; SMC: sliding mode control; TR-1: trajectory 1; TR-2: trajectory 2.

Tracking error of joints 1–4 (a) obtained by the compared control law for SMC (Tr-1), (b) obtained by the proposed control law for SMC (Tr-1), (c) obtained by the compared control law for SMC (Tr-2), and (d) obtained by the proposed control law for SMC (Tr-2). SMC: sliding mode control; TR-1: trajectory 1; TR-2: trajectory 2.

Motor input torque of joints 1–4 (a) obtained by the compared control law for SMC (Tr-1), (b) obtained by the proposed control law for SMC (Tr-1), (c) obtained by the compared control law for SMC (Tr-2), and (d) obtained by the proposed control law for SMC (Tr-2). SMC: sliding mode control; TR-1: trajectory 1; TR-2: trajectory 2.

Compensation torque of joints 1–4 (a) obtained by the compared control law for SMC (Tr-1), (b) obtained by the proposed control law for SMC (Tr-1), (c) obtained by the compared control law for SMC (Tr-2), and (d) obtained by the proposed control law for SMC (Tr-2). SMC: sliding mode control; TR-1: trajectory 1; TR-2: trajectory 2.
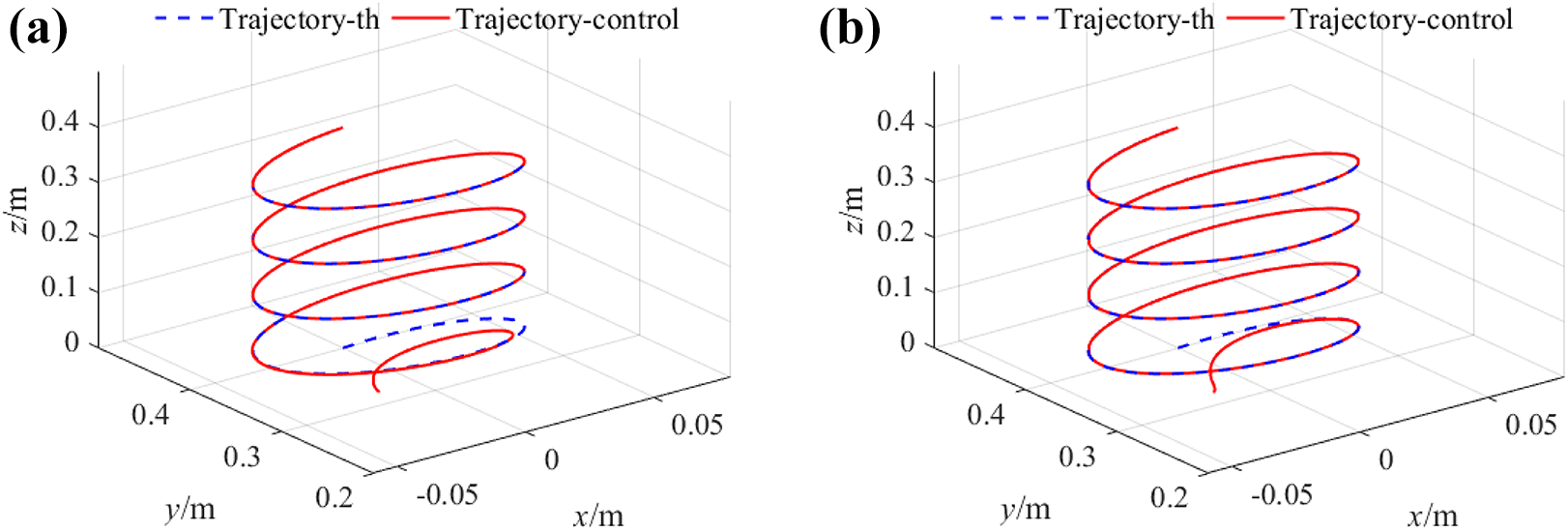
Constraint tracking (a) obtained by the compared control law for SMC (Tr-1), (b) obtained by the proposed control law for SMC (Tr-1), (c) obtained by the compared control law for SMC (Tr-2), and (d) obtained by the proposed control law for SMC (Tr-2). SMC: sliding mode control; TR-1: trajectory 1; TR-2: trajectory 2.
The position tracking of each joint is illustrated in Figure 2, in which the dashed lines are the given curve of position (i.e. qdi ) and the solid lines are the position response curve (i.e. qi ) obtained based on the compared control law for SMC (Figure 2(a) and (c)) and the proposed control law for SMC (Figure 2(b) and (d)), respectively. The position response curve obtained by using the proposed control law for SMC tends to the theoretical curve faster significantly than that obtained by using the compared control law for SMC.
The tracking errors of each joint of the SCARA robot are close to 0 by using the compared control law for SMC (see Figure 3(a) and (c)) and the proposed control law for SMC (see Figure 3(b) and (d)) for about 4, 3, 1.3, and 0.93 s, respectively. The comparison indicates that the proposed control law for SMC combining linear sliding mode manifold and double-power reaching law implements finite time convergence of the error. Meanwhile, its convergence rate is greater than that of the compared control law for SMC combining linear sliding mode manifold with exponential reaching law.
The motor torque and compensation torque obtained by the proposed control law for SMC (see Figures 4 and 5) can weaken the chattering better and the system has strong robustness while ensuring the tracking speed by comparing with the chattering phenomenon of the torque output obtained by the compared control law for SMC. The constraint tracking diagram of the SCARA robot system is illustrated as in Figure 6. Obviously, the proposed control law for SMC can track the given trajectory more quickly.
Conclusions
Aiming at the constraint tracking control of robot systems with uncertainties, the sliding mode manifold and the reaching law of SMC strategy are analyzed. The control law for SMC combining the linear sliding mode manifold and the double-power reaching law is formulated based on the dynamics equation of robot system obtained by using U-K theory with the general SCARA robot be taken as an example. Response curve of position tending theory curve obtained by using the proposed control law is obviously faster than that obtained by using the compared control law for SMC. Position tracking accuracy obtained by using the proposed control law is better than that obtained by using the compared control law for SMC, and the system performance is improved. Motor input torque and compensation torque obtained by using the proposed control law can weaken the chattering better, and the system has strong robustness and can track the given trajectory more quickly.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Beijing Municipal Science and Technology Project [grant no. KM202111417006]; the Academic Research Projects of Beijing Union University [grant no. ZK80202004]; the National Key R&D Program of China [grant no. 2018YFB1307001]; and the Science and Technology Research Project of Higher Education Department of Hebei Province [grant no. QN2020510].