
Abstract
In this paper, a distributed model predictive control (DMPC)-based three-dimensional (3D) cooperative guidance scheme is proposed for multiple interceptors with controllable thrust and constrained acceleration, to simultaneously attack a maneuvering target at desired terminal angles. The cooperative guidance scheme consists of a fractional power function-based extended state observer (FPESO) for disturbance estimation, and a DMPC controller to generate the control actions. By introducing the assumed state trajectory, the DMPC controller (of each interceptor) can simultaneously employ the zebra optimization algorithm (ZOA) to solve the constrained optimization problem, and generate the real-time guidance commands with no need of any global information. For restricting the uncertain deviation between the assumed state trajectory and the actual one, a compatibility constraint is designed, and the terminal ingredients are developed for coupling and decoupling stage costs, respectively. By applying the above designed constraints and the terminal ingredients, the recursive feasibility of the resulting optimization problem and the closed-loop stability of multi-interceptor system are both ensured. Through numerical simulations, it is verified that the proposed cooperative guidance scheme can achieve cooperative interception with impact time and angle constraints in various scenarios, and has advantageous performance.
Keywords
Introduction
With the improvement of target maneuverability and the advancement of anti-interception techniques, the traditional single interceptor-based operation is no longer suitable for the complex and ever-changing modern battlefield environment. Owing to the ability to increase the success rate of interception, the salvo attack of multiple interceptors is considered a more effective combat pattern, thus the cooperative guidance laws have received increasing concern.1–5
Early cooperative guidance laws mainly focused on the simultaneous arrival of interceptors, which was achieved through two main methods. The first method is by designating an impact time, then controlling all the interceptors to hit the target exactly at that time.6–8 This sort of control methods is called impact time control guidance (ITCG) laws, and has long attracted interests of researchers. However, the inherent weakness of ITCG laws cannot be evaded. As pointed out by Zhao et al., 9 due to the absence of communication among interceptors during guidance, the ICTG law cannot be viewed as a genuine cooperative guidance law. Besides, an inappropriate impact time assigned in advance might lead to the failure of interception. For these considerations, extensive research has been conducted on the second method of achieving simultaneous arrival, which is by designing a specific coordination algorithm utilizing the communication information among interceptors.9–13 As the pioneering research of this way, Zhao et al. 9 presented a cooperative guidance scheme which combined the coordination algorithms with local guidance laws, where the coordination algorithm was designed using multi-agent consensus theory, serving as an additional term to local guidance laws such as PNG. Due to the utilization of the local guidance laws, the performance of the above cooperative guidance law is guaranteed. However, since the assumption that the velocities of interceptors are constants are implicit in the above cooperative guidance law, 12 it may not be applicable in scenarios where the magnitude of velocity of interceptors is variable. Different from the above work, Lyu et al. 13 developed a cooperative guidance law with two components in the planar line-of-sight (LOS) frame, in which the component along the direction of LOS guaranteed all interceptors’ impact times achieved consensus asymptotically, while the component along vertical direction of LOS ensured all the interceptors precisely hit the target. This design method is applicable to interceptors with controllable thrust, and adopted by most research on impact angle-constrained guidance law. 14
Recent cooperative guidance laws focused more on the specific requirements in practical missions, such as impact angle control (or impact angle constraints),14–19 because cooperative interception at different impact angles is highly important for maximizing the damage effect against high value targets. 14 Adopting the design method from Lyu, 13 Zhang et al. 14 proposed the cooperative guidance laws in the LOS direction and in the normal direction to the LOS, respectively. Among them, the former was based on the finite-time consensus to achieve the simultaneous attack of all the interceptors, the latter was derived using the super-twisting control algorithm, to make the impact angle of each interceptor converge to the expected value. Song et al. 18 and Dong et al. 19 further extended such a design method to three-dimensional (3D) interception scenario, using adaptive super-twisting sliding mode control, integral sliding mode control, fixed-time consensus and other techniques to achieve 3D cooperative interception with impact time and angle constraints.
Expect for the impact angle constraint, the acceleration saturation constraint is another factor that should be considered from the practical viewpoint, since the acceleration that can be provided is restricted by the control ability of actuator. 20 With the natural advantage of handling various constraints, model predictive control (MPC) is a preferred approach in distributed control of multi-agent system,21–23 and has been applied to multi-interceptor cooperative guidance with acceleration saturation constraint in recent years.12,24–27 The most significant advantage of MPC over traditional optimal control is that it employs the optimization procedure online to determine the control actions, rather than using a pre-computed control law. This endows MPC with the ability to handle external disturbances and uncertainty. Among the existing works that applied MPC to cooperative guidance problems, Zhao et al. 24 proposed an impact time-constrained cooperative guidance approach using nonlinear MPC, and introduced the assumed (estimated) state trajectory to make interceptors synchronously solve the optimization problems subject to control input constraints. Jiang et al. 12 employed MPC and convex optimization technique to solve for the optimal guidance gain of each interceptor, thereby achieving the consensus on times-to-go among interceptors under the constraint on the maximum lateral acceleration. Cong et al. 27 used distributed model predictive control (DMPC) to design the cooperative guidance algorithm for follower interceptors under virtual leader-follower cooperative strategy, and introduced the assumed state trajectory. Although the above works provide evidence that MPC (DMPC) can be well used for cooperative guidance with multiple constraints, the following issues have not yet been addressed for most studies on DMPC-based cooperative guidance.
(a) In several works,24,25,27 the assumed state trajectory was introduced to make interceptors synchronously compute their guidance commands, however, none of the above studies have considered the uncertain deviation between the assumed state trajectory and the actual one, which might affect the stability of the overall system.
(b) Although the performance of DMPC has been validated through simulations or experiments,12,24–27 the recursive feasibility and closed-loop stability of DMPC have not been theoretically proven in any cooperative guidance scheme, and few of studies have formulated the associated constraints to guarantee the above properties.
(c) Up to now, the research that simultaneously incorporate the acceleration saturation constraint, impact time, and impact angle control into the cooperative guidance law design is still little. Besides, most of studies based on MPC only concerned the cooperative guidance against stationary or low-speed targets.
In view of the above issues, a DMPC-based 3D cooperative guidance scheme is worthy of further investigation, especially considering the huge potential of MPC in integrating and handling multiple objectives and constraints. These objectives and constraints typically reflect the practical requirements of combat, and have great significance in maximizing the success rates of cooperative interception and enhancing the combat capability of interceptors in different engagement scenarios. Therefore, this paper proposes a DMPC-based 3D cooperative guidance scheme for intercepting a maneuvering target, which is able to simultaneously achieve impact time and impact angle control under the acceleration saturation constraints. The main contributions of this paper are highlighted as follows.
1) To the best of our knowledge, it is the first time that DMPC is used to solve 3D cooperative guidance problem with impact time and impact angle constraints for intercepting highly maneuvering targets. Different from existing methods for the above problem, we carry out the controller design under a unified framework of DMPC, rather than decomposing the guidance law into several parts.13,14,18,19 Besides, the acceleration saturation constraint is also taken into our consideration from the practical perspective.
2) Compared with studies24,25,27 which only applied synchronous DMPC to cooperative guidance problems, we further formulate the associated constraints to ensure the closed-loop stability of the multi-interceptor system under DMPC, without utilizing any globally shared reference states.21–23 Different from the method 26 which integrally generates the guidance commands for all the interceptors, we adopt zebra optimization algorithm (ZOA) to solve for the optimal guidance commands independently for each interceptor.
The remainder of this paper is organized as follows. In section 2, some preliminaries about 3D cooperative guidance are provided, and the nonlinear dynamics for each subsystem are established. In section 3, the detailed design of the distributed cooperative guidance scheme is conducted, and the complete implement process is introduced. In section 4, the properties of the cooperative guidance scheme are analyzed. In section 5, the numerical simulations are carried out under diverse cases, in which the proposed cooperative guidance scheme is compared with other advanced methods. Finally, in section 6, the conclusions are drawn.
Preliminaries
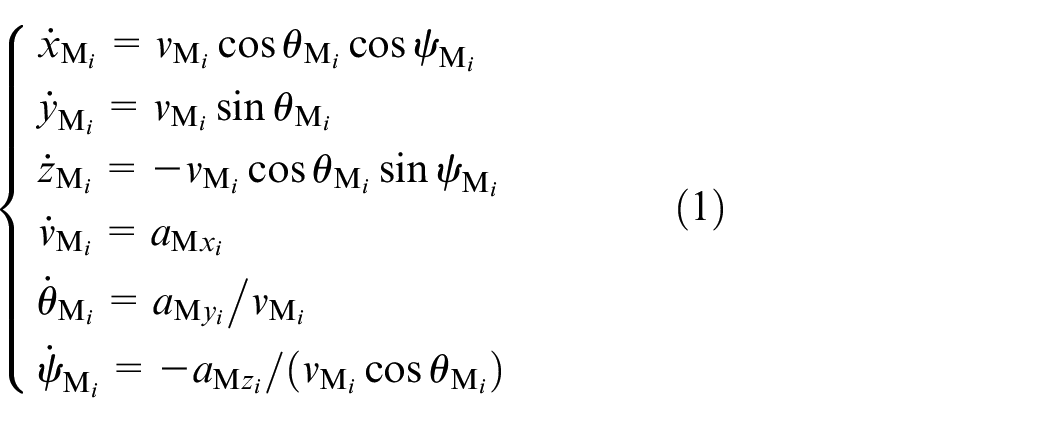
Consider the guidance scenario of a group of interceptors attacking a single maneuvering target. The 3D engagement geometry between the
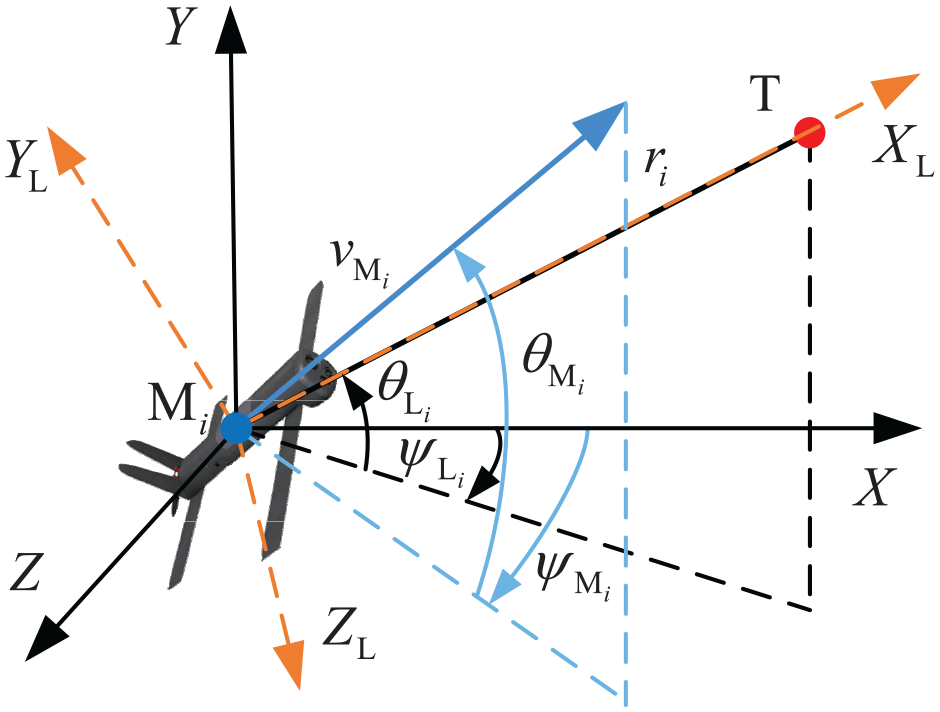
Three dimensional engagement geometry between the interceptor and the target.
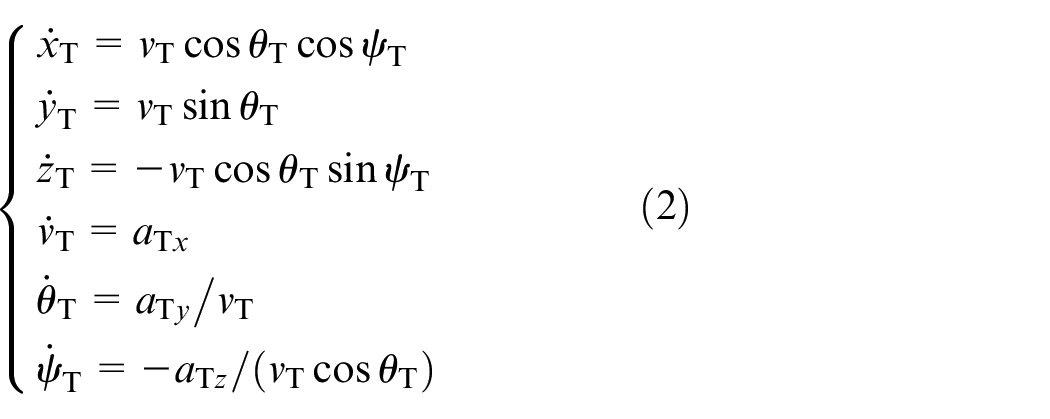
Similarly, the motion of the target in inertial frame is obtained as equation (2), the meanings of
The relative motion between


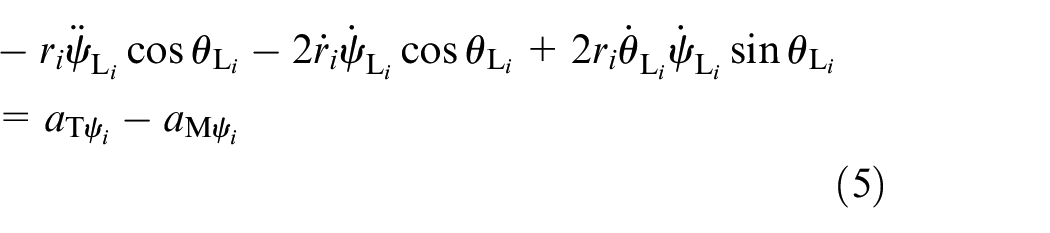
Commonly, the guidance problem with impact angle constraints is also deemed as the control problem of line-of-sight angles, 18 that is, controlling the LOS angles of each interceptor to converge to their desired values at the end of guidance.

In equation (6),

In equation (7),

According to equations (7) and (8), coordinating the impact time among interceptors is equivalent to achieving the consensus on the remaining time



According to definition 1 and equations (3)–(5), the system dynamics of each interceptor are established as follows.

where
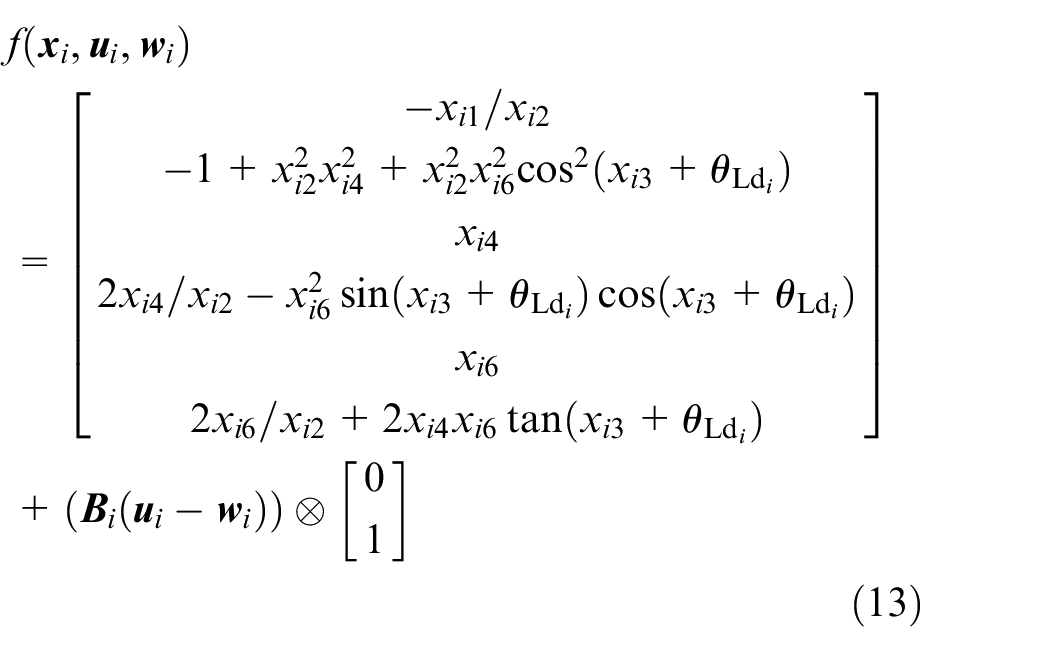




In the above equations,



Based on the system formulated above, we will design a guidance scheme which consists of the control inputs

In order to facilitate the guidance scheme design, the following assumptions are necessary.
(1) For the target, the control actuator requires a process to implement the maneuvering command, thus the variation of the maneuvering accelerations is continuous and smooth.
(2) When the relative velocity changes from negative to positive, the target either escapes interception or is intercepted, the guidance will immediately terminate no matter which of the above situation occurs, thus the relative velocity is always negative during guidance.
(3) For the interceptor equipped with an active radar seeker, the aforementioned information can be acquired or calculated in real time.
Design and implementation of the distributed cooperative guidance scheme
For a strongly coupled and highly nonlinear system as shown in (13), it is challenging to develop a distributed control law to achieve the cooperative interception as required in definition 1, especially when the system is subjected to unknown disturbances. However, by adopting the guidance scheme given by (21), we can simultaneously achieve the disturbance rejection and the stabilization of the multi-interceptor system. This motivates us to design a DMPC-based cooperative guidance scheme, as shown in Figure 2.
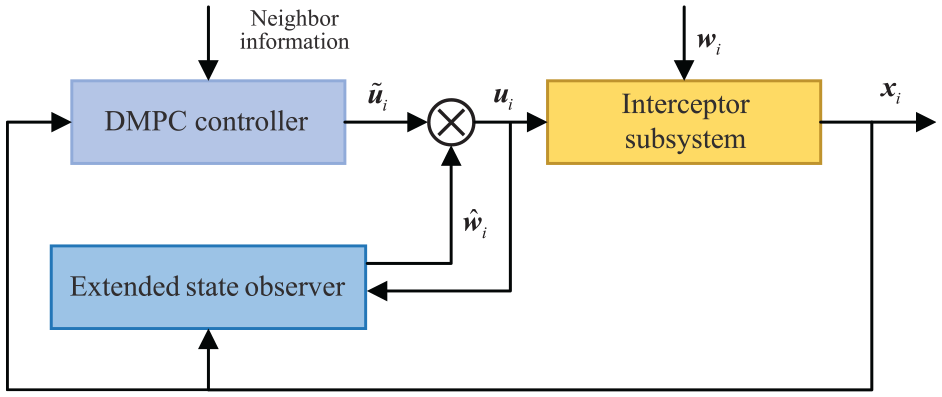
The control loop of the cooperative guidance scheme.
The cooperative guidance scheme consists of a fractional power function-based extended state observer (FPESO) for disturbance estimation, and a DMPC controller to generate the control actions. By the virtue of DMPC, we can handle all the constraints involved in the cooperative guidance problem. The focus of controller design is on the development of compatibility constraints and the terminal ingredients, as they are all crucial guarantees for the stability of the multi-interceptor system, and have not yet been designed in relevant research. Besides, we also aim to enhance the real-time performance of the cooperative guidance scheme by efficiently solving the DMPC problem.
Design of the extended state observer
The extended state observer is central to the disturbance rejection control. Through a properly designed ESO, the disturbances can be estimated and canceled in the feedback loop. 28 In the recent studies regarding ESO, Han 29 proposed a nonlinear ESO based on fractional power function (FPESO), Zhao 28 illustrated the relationship between the selection of the gains and the convergence of the aforementioned FPESO, and Zhang 30 designed a FPESO to improve the estimation accuracy for the compound disturbances. These works demonstrate the advantage of FPESO over conventional linear ESO in terms of noise tolerance. Motivated by them, in this subsection, a FPESO is designed to estimate disturbances caused by target maneuver.
First, the states to be observed are selected as follows.
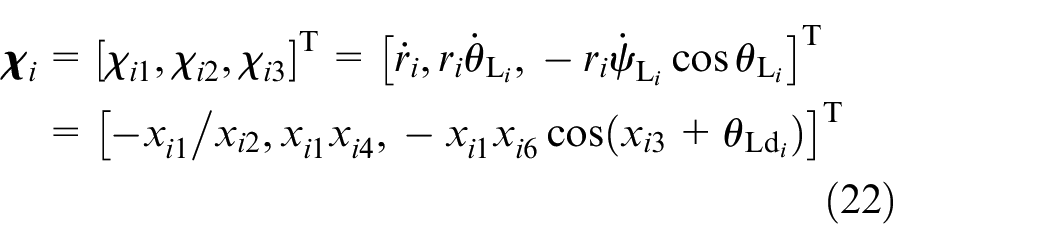
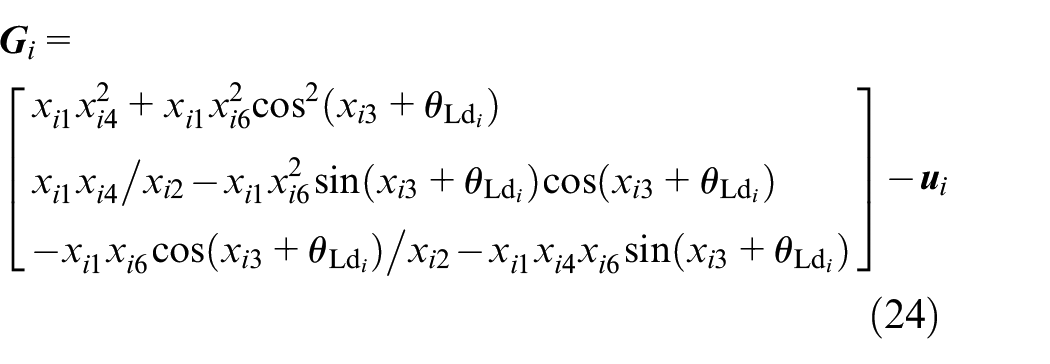
Differentiating

where
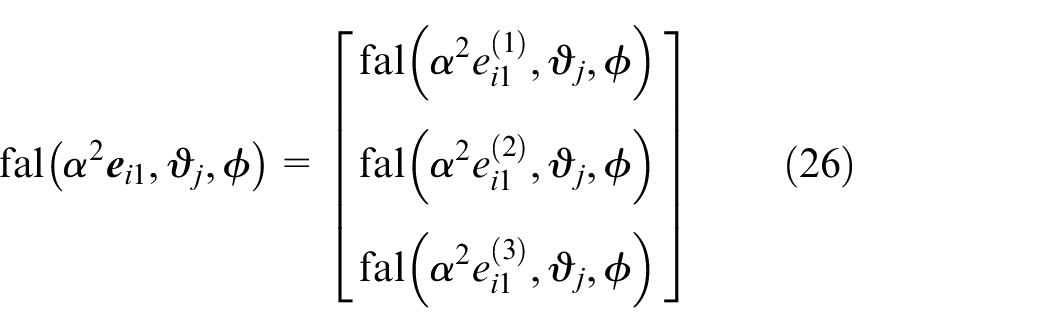
Then, given assumption 1 and inspired by Zhao, 28 we design the FPESO as follows.
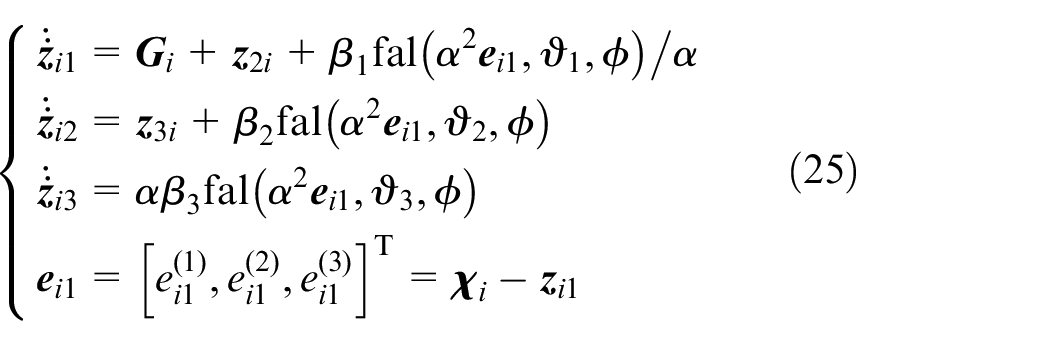
In (25),
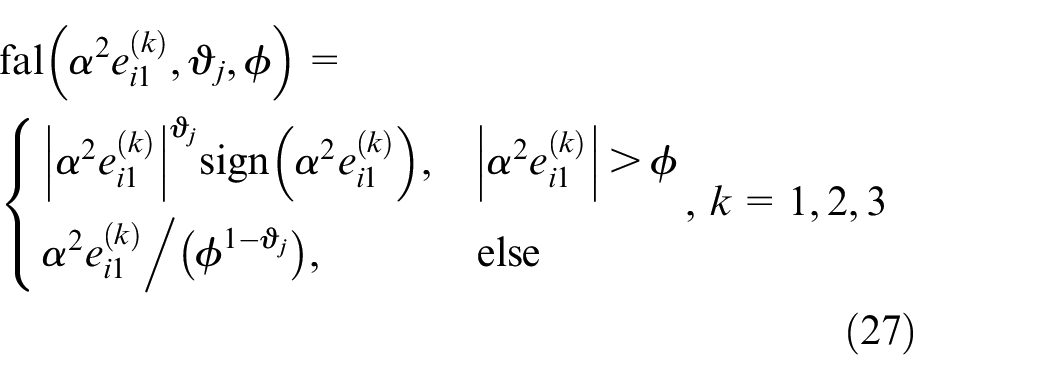
parameter

The positive constants
Let the estimation errors be

where
Based on lemma 1, the disturbances caused by target maneuvering are completely compensated by implementing control inputs (21) and the FPESO (25). Therefore, the closed-loop stability of the multi-interceptor system is guaranteed so long as the nominal control inputs are appropriately designed. In the next subsection, a cooperative guidance law based on DMPC will be proposed to guarantee the stability of the multi-interceptor system, thereby achieving all the goals in definition 1.
Design of the DMPC controller
As an optimization-based control technique, MPC uses an optimization problem over a given horizon to describe what system behavior is expected and which constraints must be satisfied. 31 With the up-to-date information of the system being acquired at each sampling instant, such an optimization problem will be renewed and solved by employing an optimization procedure, and a portion of the optimal solution will be implemented as the real-time control action. This pattern provides MPC with advantages in handling complex constraints and disturbances rejection.
As an emerging control strategy of MPC, DMPC is characterized by lower computational burden and more flexible structure, as it does not require a central agent to compute the control actions for, and communicate with all remaining agents. Among several update strategies of DMPC (including sequential DMPC, 32 iterative DMPC, 33 and synchronous DMPC21–23), the synchronous DMPC allows all the agents to synchronously solve the optimization problem and obtain the control inputs, which ensures the real-time performance of the overall system.
Therefore, the synchronous DMPC will be used to design the cooperative guidance scheme in this subsection. By implementing the synchronous DMPC, each interceptor only needs to communicate with its neighbors and independently solve its optimization problem. Since each neighbor is coupled with the interceptor through a coupling cost function, the main focus is to handle the coupling terms by designing associated constraints and terminal ingredients, thereby ensuring the recursive feasibility of the optimization problem and stability of the overall system.
Basic model of DMPC
Considering the control objectives given in definition 1, a finite-horizon optimization control problem (FHOCP) for the nominal system (20) is defined as follows.
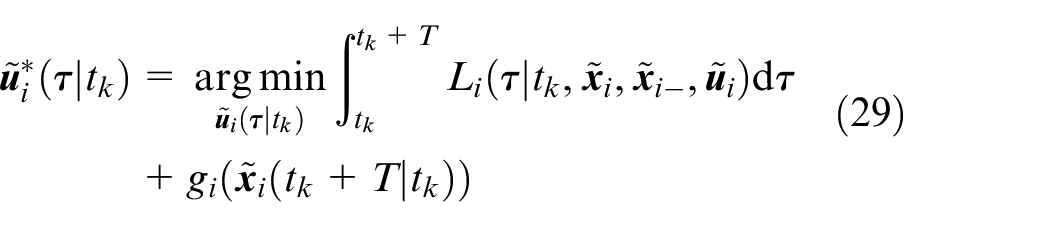
subject to: system dynamics (30), (31) and control input admissible constraints (32).



In which
Assumed state trajectories and compatibility constraints
It is observed in (33), the stage cost function is divided into the coupling cost and decoupling costs. For the decoupling costs, the nominal state trajectory can be obtained according to the system dynamics (31) of each interceptor. However, for the coupling cost, it is not possible to exactly know the actual state trajectory of neighbors until they find their optimal control inputs. Therefore, in order to guarantee the synchronization in computing the control actions, an estimation for
In equation (34),
By implementing
Replacing the actual state trajectory with the assumed one, the stage cost is then rewritten as
The introduction of the assumed state trajectory guarantees the synchronization of interceptors in computing their control actions, so long as each interceptor transmits its assumed trajectory to the neighbors before they solve their respective optimization problems. However, the uncertain deviation from the actual state trajectory will also be induced, thus a proper constraint should be designed to limit such a deviation and further to guarantee the convergence of the overall system.
According to the stage cost given by (35), the only state variable included in the coupling cost is

The constraint to limit that deviation, named compatibility constraint, is designed as

In (37),

In (39),
The compatibility constraints (37) and the coupling cost
Terminal ingredients
The terminal ingredients (including the terminal auxiliary controller, the terminal cost, and the terminal set constraints) are of great significance in ensuring the recursive feasibility and local convergence of each subsystem, as well as the stability of the overall multi-agent system. However, their development remains challenging for a cooperative guidance problem,24,25,27 which prompts us to carry out the following design.
The terminal ingredients corresponding to the coupling cost. In conventional DMPC problems, the multi-agent systems are required to track a globally shared dynamic reference21–23 this reference is vital for the development of terminal ingredients. However, for the situation where such a global reference cannot be timely obtained by the interceptors, the more general terminal ingredients are needed. For this consideration, we develop the terminal ingredients by designing a locally shared dynamic reference, this practice equally maintains the consensus of the overall system.
The terminal ingredients corresponding to the decoupling costs. The control of LOS angles and their rates can be deemed as the control problem for a nonlinear second-order (or double integrator) system, the DMPC problem of which has been addressed by Gao et al. 23 However, the terminal region designed by Gao 23 is given by a terminal equality constraint, which is possibly strict and may lead to an unsolvable optimization problem. Unlike the above work, we develop a less strict terminal set constraint and its corresponding terminal auxiliary controller, by employing which the positive invariance and the recursive feasibility can be guaranteed.
Prior to the development of terminal ingredients, we introduce the following definition, which specifies the requirements that must be satisfied by the terminal ingredients.21,23



In definition 2, equation (40) represents positive invariance, equation (41) represents control input admissibility, and equation (42) represents local convergence.
Based on definition 2, the terminal ingredients corresponding to the coupling cost are designed as follows.
The terminal cost is

with the positive scalar
The terminal set constraint is given by

with the locally dynamic reference
The terminal auxiliary controller is designed as
with the control gain
In (44), the locally dynamic reference is designed as
which satisfies
Let


Thus, the design of terminal ingredients corresponding to the coupling cost is completed.
Similarly, according to the requirements in definition 2, the terminal ingredients corresponding to the decoupling costs are developed as follows.
The terminal cost is defined as
with positive scalars
The terminal set constraints are given by


Since the local convergence of LOS angles and angular rates is guaranteed by applying the terminal cost and the terminal auxiliary controller (see the proof of theorem 1 in subsection 4.1), there are no extra requirements for the selection of
The terminal auxiliary controller is designed as


with the control gain
The scalars


where equations (55) and (56) are both to ensure the existence of
Thus, the design of terminal ingredients corresponding to the decoupling costs is completed.
To sum up, the terminal ingredients for a single interceptor are given as follows.


For ensuring the existence of the terminal ingredients that satisfy all the requirements in definition 2, the following assumption is desired.
Based upon the above designed terminal ingredients and compatibility constraints, the FHOCP problem for a single interceptor to achieve cooperative interception is defined as

subject to: system dynamics (30), (31), control input admissible constraints (32), the compatibility constraint (37) and the terminal set constraint (62).

where
Now, we have completed the design of the distributed cooperative guidance scheme consisting of an extended state observer and a DMPC controller, whose implementation, together with the optimization procedure of problem 2, will be elaborated in the next subsection.
Implementation of the distributed cooperative guidance scheme
Solving procedure based on zebra optimization algorithm
Solving an optimization problem described as problem 2 commonly requires large amounts of integral operations, thus, for improving the computational efficiency, we adopt the Euler’s method to approximate the system trajectory within the control horizon.
Applying (63), one can obtain the system states and control inputs in the form of sequences, that is,


The cost function, is accordingly approximated by
All the constraints related to the states are supposed to be approximated in a same manner, such as the compatibility constraint, which will be approximated by (67) and can be further transformed into the constraint directly imposed on the control input
Similar to the compatibility constraint, the terminal set constraints can also be imposed on the control inputs
where
In order for implementing the transformed constraints, we define a saturation function given by (70).
Based on the above, an emerging swarm intelligence-based optimization algorithm, ZOA 37 is utilized to solve the processed optimization problem 2. As a new bio-inspired metaheuristic algorithm, ZOA simulates the foraging behavior of zebras and their defense strategy against predators’ attacks, whose performance in solving high-dimensional problem has been validated through comparison with other well-known algorithms.
In ZOA, each zebra corresponds to a candidate solution of the optimization problem, which can be evaluated by an objective function. For the processed optimization problem 2, the position of each zebra is denoted as
The position update of ZOA is divided into two phases in each iteration, imitating the natural behaviors of zebras, they are
(1) Foraging. In foraging phase, the zebra with the minimum objective function value is considered as the pioneer zebra, who will lead the other zebras toward its position. The position update in this phase is described as


where
(2) Defense against predators. In this phase, zebras adopt different strategies to resist attacks from different predators. For bigger predators like lions, zebras will escape in random sideways turning movements, for smaller predators such as hyenas, zebras will gather toward the attacked zebra to intimidate predators. The position update in this phase can be modeled as

where
All the zebras will go through check and correction after update lest they overstep the search area, that is, violate the admissible set constraints given by (69). The procedure of check and correction can be described using the following pseudo-code.
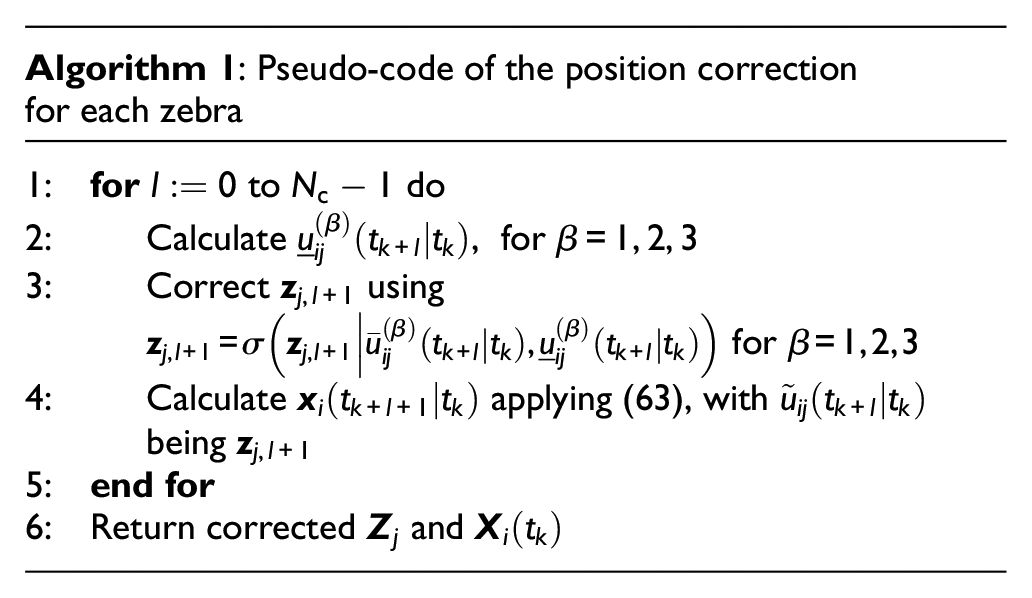
And the complete procedure of obtaining
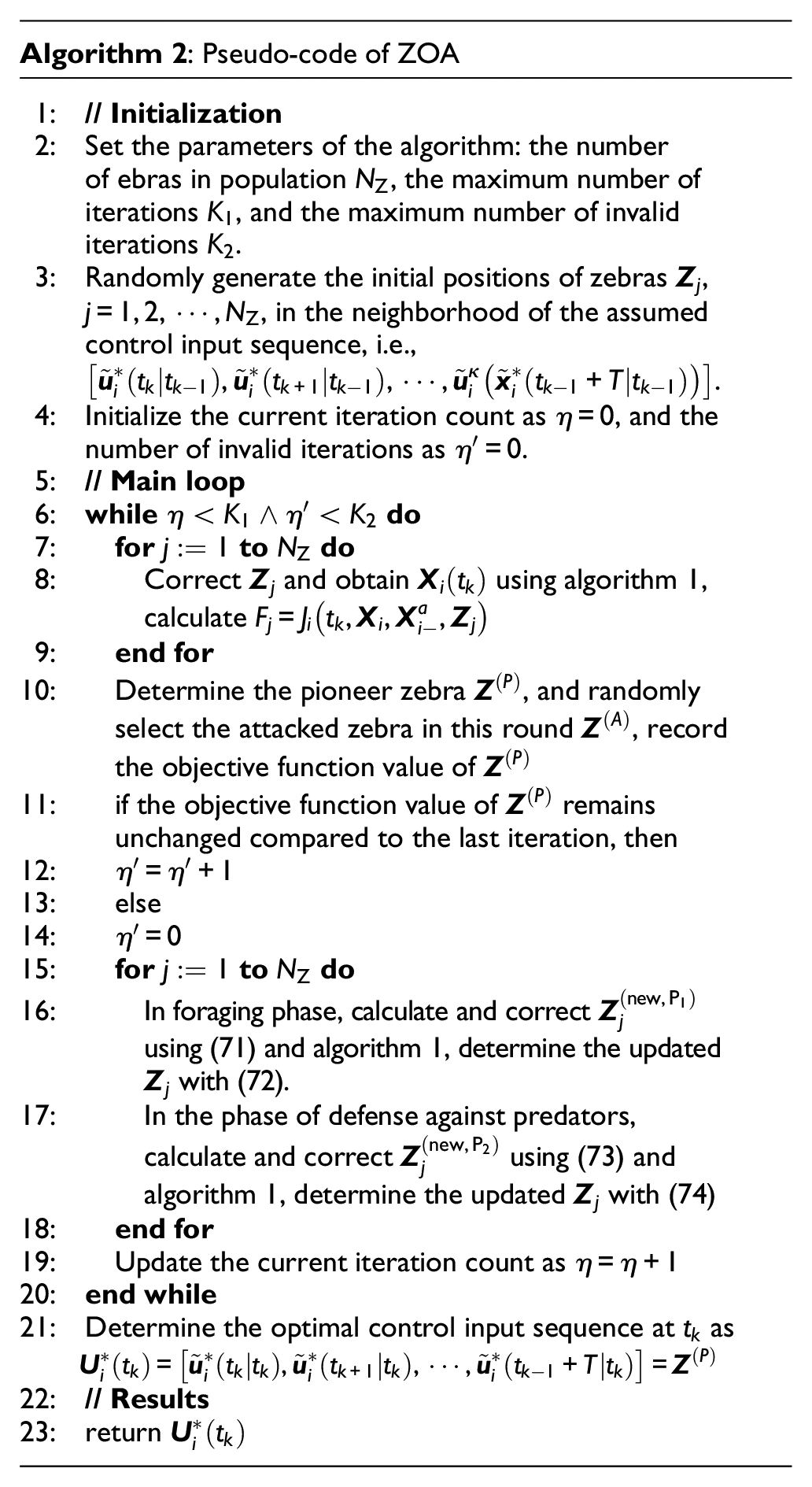
Complete implementation of the distributed cooperative guidance scheme
After obtaining
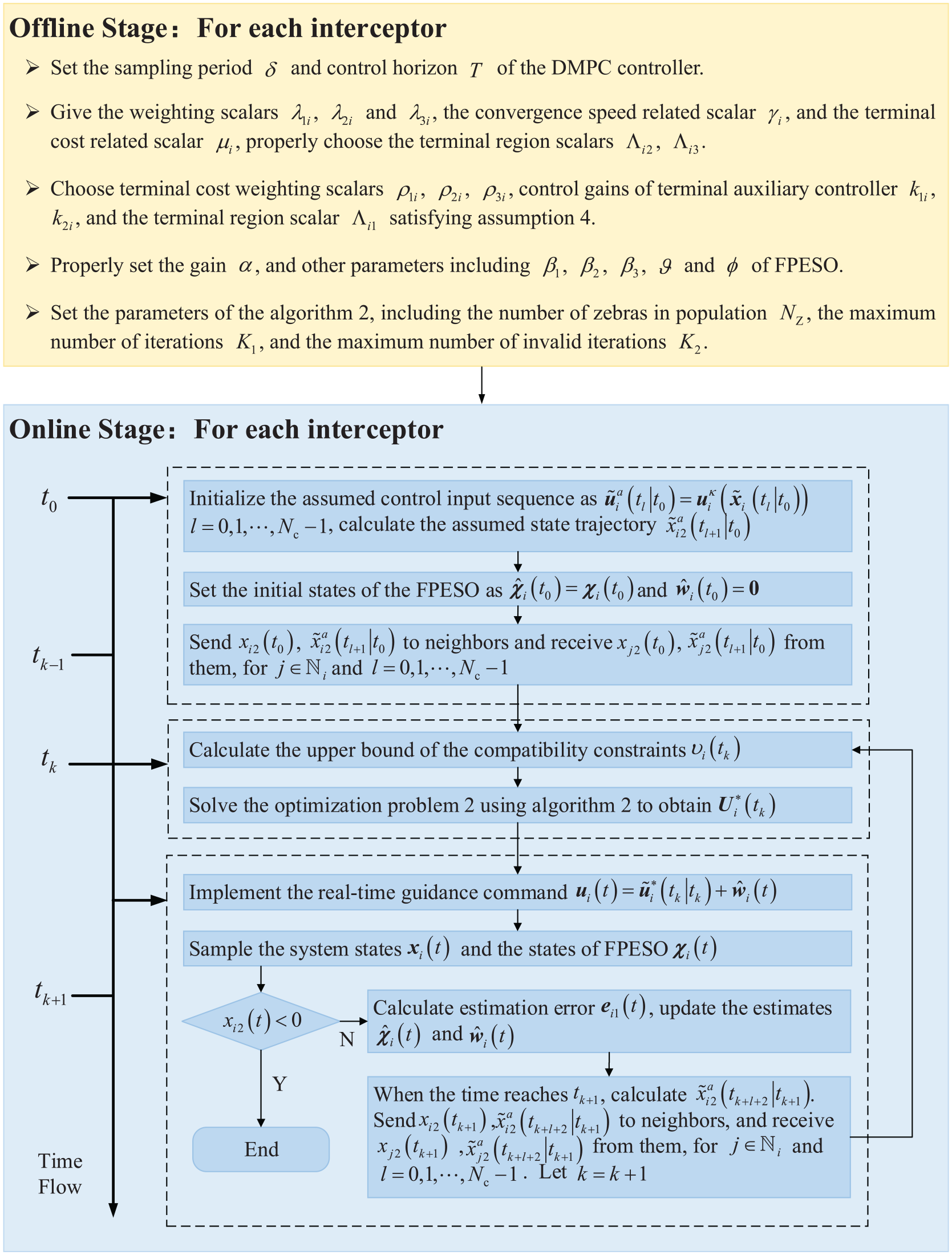
Flowchart of the proposed DMPC cooperative guidance scheme.
In the next section, an analysis of the distributed cooperative guidance scheme will be conducted to demonstrate that the closed-loop stability of the multi-interceptor system can be ensured by implementing the proposed cooperative guidance scheme, with all the requirements of cooperative interception specified in definition 1 being achieved.
Feasibility and stability analysis of the distributed cooperative guidance scheme
Since the distributed cooperative guidance scheme is designed following the common practice of DMPC, two properties will be illustrated in this section, they are the recursive feasibility of the optimization
Recursive feasibility
In this subsection, we will prove that the optimization
(a) all the requirements in definition 2 are satisfied.
(b) the optimization problem 2 is feasible at every sampling instant after
whose proof follows.
According to lemma 1, after the convergence of FPESO, the deviation between the actual state trajectory and the nominal state trajectory can be neglected, thus the system will evolve along the following dynamics when

For this reason, “
(a) According to assumption 4, there always exists the terminal auxiliary controller
Then, by implementing



Applying (76) and

According to (79), there is
Applying (77) and (57), the constraint (51) is satisfied for
Similarly, applying (78) and (57), the constraint (52) is satisfied for
Then, by dividing the stage cost into the coupling cost and the decoupling costs, one can get

where

Applying inequality
Therefore, the inequality

Substituting (44), (47)– (49), (76) and
Accordingly, inequality
Applying (57) and (80), there is
According to
In summary, conclusion (a) holds.
(b) Since optimization problem 2 is feasible at
By implementing



According to (46), there is
Applying (91) to (88), yields
Combining (92) with (89), (90), one can obtain
Then, based on condition (40) in definition 2 (which has been proven to hold in conclusion (a)), by implementing
Since the state trajectory obtained by implementing
In summary, for the candidate solution
Thereupon, the proof of theorem 1 is completed. ▪
Closed-loop stability
In this subsection, the multi-interceptor system is proven to be stable under the proposed cooperative guidance scheme, that is, all the interceptors are guaranteed to achieve consensus on impact time, and intercept the target at their desired terminal LOS angles. The details are as follows.
Whose proof follows.
For the multi-interceptor system, the Lyapunov function is selected as

which satisfies
Since
In which
Then, applying condition (42) in definition 2 (as proven in theorem 1), there is (95) for any

Integrating (95) from

Let
and
Combining (98) with (97), and substituting (38) and (39), there is
According to (94), (96) and (99), the following inequality holds.

From (100), one can conclude that, the Lyapunov function of the multi-interceptor system will exponentially decrease to zero, that is, all the requirements in definition 1 will be satisfied, and the multi-interceptor system is guaranteed to achieve cooperative interception.
The proof is completed.▪
Numerical simulations
In order to verify the effectiveness of the proposed DMPC-based cooperative guidance (DMPC-CG) scheme, numerical simulations are carried out in this section. In different simulation scenarios, a group of 4 interceptors with fixed communication topology are required to attack a maneuvering target which adopts diverse maneuvering strategies. The communication topology among the interceptors is shown in Figure 4, the initial positions and velocities of interceptors and target are given in Table 1, the acceleration magnitude of interceptors is up to 200 m·s−2.
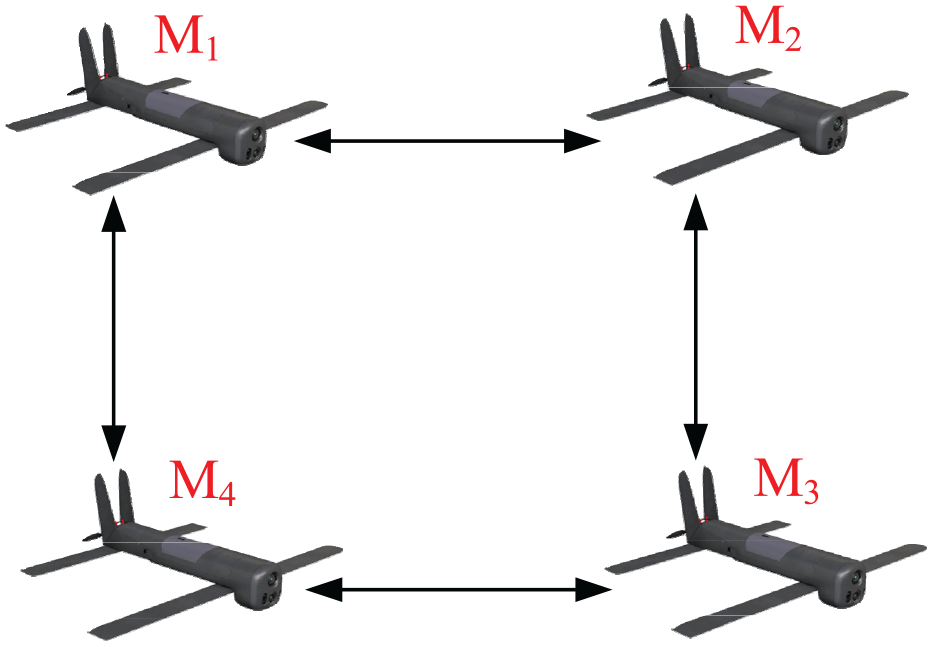
Communication topology among interceptors.
Initial states of interceptors.
The parameters of the DMPC controller are listed as

The parameters of the extended state observer are shown as

The parameters of the Zebra optimization algorithm are given as

The sampling period and control horizon of the DMPC controller are set to
Comparative experiments without external noise
In this subsection, the interceptors are required to perform the interception tasks without external noises. In order to validate the effectiveness of the DPMC cooperative guidance scheme in challenging task settings, the experiments will be carried out in the following scenarios.
Desired terminal LOS angles are

The velocity and acceleration magnitudes of the target in inertial reference frame are

Desired terminal LOS angles are

The velocity and acceleration magnitudes of the target in inertial reference frame are
where
Besides, in order to demonstrate the advantages of the proposed DMPC-CG, the fixed-time cooperative guidance (FxTCG) law 19 will be used for comparison, and the simulation results for the two cases are shown in Figures 5 and 6 and Tables 2 and 3, respectively.
Simulation results of case 1. (a) 3D flight trajectories of interceptors and the target (b) variation curves of LOS angles (c) variation curves of times-to-go (d) acceleration commands in LOS frame.
Simulation results of case 2. (a) 3D flight trajectories of interceptors and the target (b) variation curves of LOS angles (c) variation curves of times-to-go (d) acceleration commands in LOS frame.
Simulation results of case 1.
Simulation results of case 2.
It can be observed from Figures 5(a) and 6(a) that all the interceptors eventually hit the target with smooth trajectories. However, in case 1, the interceptors using FxTCG perform more rapid maneuvers, resulting in the strong deflections of the flight trajectories. Similar deflections also occur on the variation curves of the LOS angles, as shown in Figure 5(b). By contrast, the interceptors adopting DMPC-CG have smoother variation curves of LOS angles in both cases owing to the reasonable design of the DMPC controller. From Figures 5(c) and 6(c), it can be seen that all the interceptors reach the consensus on times-to-go using either method, subtle difference lies in the convergence time. Adopting DMPC-CG, the convergence times of consensus errors are about 2 s and 2 s, shorter than those using FxTCG (3 s and 2.5 s). According to Figures 5(d) and 6(d), except for the small fluctuations induced by the computation results of the stochastic optimization algorithm, the acceleration commands under DMPC-CG do not exhibit intense changes during guidance. By comparison, under FxTCG, the lateral and normal acceleration commands (
The next subsection will compare the performance of the two methods in the presence of external noise and disturbances.
Comparative experiments in the presence of external noise
In this subsection, the interceptors will perform tasks in the presence of measurement noises and wind disturbances to test the robustness of the DMPC-CG scheme. Similar to subsection 5.1, the simulations will be conducted in the following scenarios.
Models of the bounded measurement noises can be described as

where

where
Comparative experiments will be conducted to test the performance of the designed FPESO (DMPC-FPESO), fixed-time ESO, 19 and linear ESO (LESO) 39 in terms of disturbance and noise tolerance. The fixed-time ESO is tested together with the FxTCG, and the LESO will be integrated into the DMPC (DMPC-LESO) controller for testing.
Simulation results can be seen in Figures 7 and 8 and Tables 4 and 5. The consensus error of
Simulation results of case 3. (a) 3D flight trajectories of interceptors and the target (b) variation curves of LOS angles (c) variation curves of consensus errors (d) Response of extended state observers (e) disturbance estimation errors.
Simulation results of case 4. (a) 3D flight trajectories of interceptors and the target (b) variation curves of LOS angles (c) variation curves of consensus errors (d) Response of extended state observers (e) disturbance estimation errors.
Simulation results of case 3.
Simulation results of case 4.
In the next subsection, a comparative experiment will be conducted to demonstrate the advantages of DMPC-CG over other DMPC-based cooperative guidance schemes.
Performance comparison with constraint-free models
In order to demonstrate the advantages of the proposed DMPC-CG, the comparison is made with the synchronous DMPC models which ignored the design of compatibility constraints and terminal ingredients.24,27 The constraint-free DMPC model can be described as

subject to: system dynamics (30), (31) and control input admissible constraints (32).
In (103),
The simulation will be carried out under the same settings as case 1. Simulation results are shown in Figure 9 and Table 6.
Comparative experimental results of DMPC-CG and constraint-free DMPC. (a) variation curves of LOS angles (b) variation curves of times-to-go (c) variation curves of the objective function value of constraint-free DMPC (d) variation curves of the objective function value of DMPC-CG.
Comparative experimental results of DMPC-CG and constraint-free DMPC.
Figure 9(a) shows that, the variation curves of LOS angles under constraint-free DMPC exhibit continuous fluctuations throughout the guidance process, which is mainly due to the lack of terminal auxiliary controllers (53) and (54), and an inappropriate objective function design. From Figure 9(b), the times-to-go under constraint-free DMPC seem to reach a consensus in the initial stage of guidance, however, the consensus errors among interceptors have not been fully eliminated before the end of guidance. By comparison, benefiting from the compatibility constraint (37) and the terminal set constraint (44), the DMPC-CG achieves better consensus effect throughout the entire guidance process. Figure 9(c) and (d) respectively depict the variation curves of the objective function values under the two methods. Using either of them, the objective function value shows a decreasing trend for most of the time. However, without the guarantee provided by the compatibility constraint and the terminal ingredient, the closed-loop stability under constraint-free DMPC is broken in the final stage of guidance. The detailed performance comparison between the two methods is shown in Table 6, and the DMPC-CG has huge advantages over the constraint-free DMPC model, which further demonstrates the significance of the compatibility constraint and the terminal ingredients designed in this paper.
Test for different settings of parameters
Test for parameters of the DMPC controller
In this subsection, we will provide a tuning guideline of the parameters by testing the cooperative guidance effect under different parameter settings. As shown in the stage cost (35), the weighting scalars
Test for
and
Variation of
For further testing the impact of different parameter selections on the convergence performance of consensus errors, we choose the following three sets of parameters for simulation.
The simulation will be carried out in the scenario of case 2, with all other parameters being the same as those given before.
Simulation results can be seen in figure 11, and it shows that the consensus errors under all three sets of parameters are the same at the end of guidance, while different parameters exhibit diverse variation trends in the convergence process.
Variation of consensus errors under different parameter settings of DMPC controller.
The variation under the second set of parameters indicates that, the larger the gain
Test for
,
, and
Variation of the value range of
Based on (57), the variation curves of the upper and lower bounds of
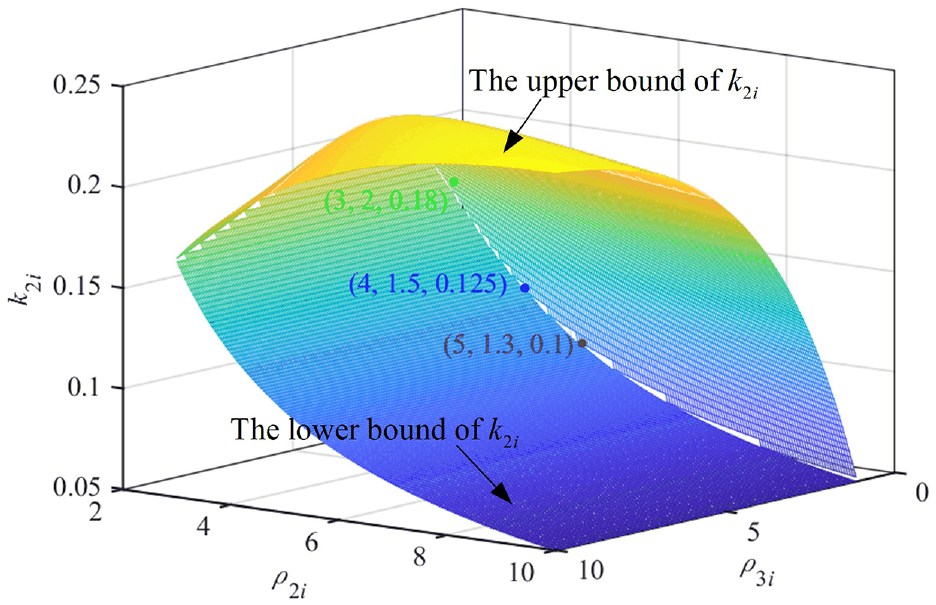
Variation of the upper and lower bounds of
In order to further test the guidance effect under different parameter settings, we select the following three sets of parameters for simulation.
The simulation will be conducted in the scenario of case 2, with all other parameters being the same as those given in subsection 5.1.
Simulation results can be seen in Figure 14 and Table 7. It shows that as the control gain
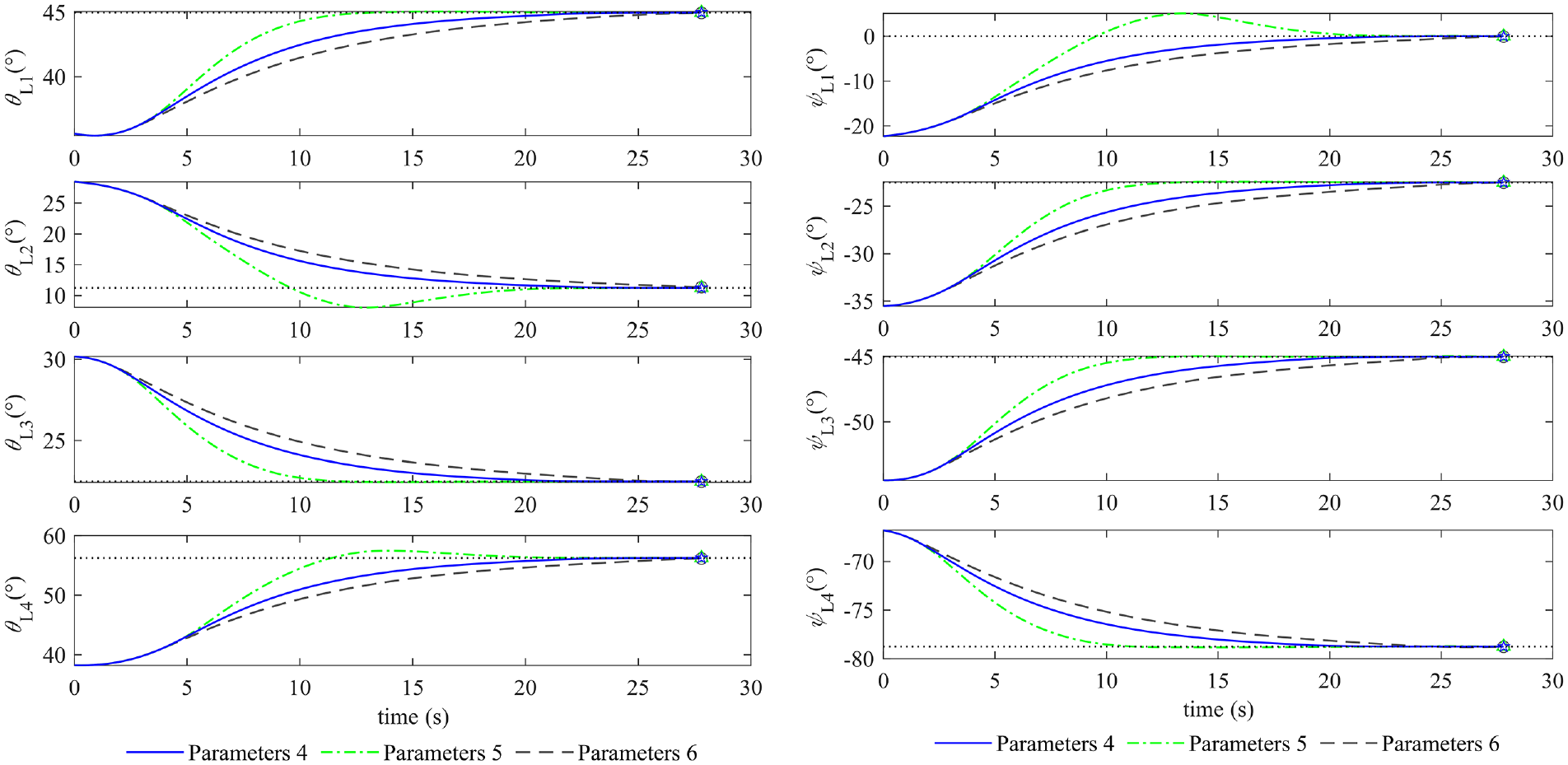
Variation curves of LOS angles under different parameter settings of the DMPC controller.
Simulation results under different parameter settings of the DMPC controller.

Test for parameters of ZOA
In this subsection, we will analyze the computational efficiency under different parameter settings of the Zebra optimization algorithm (including the number of zebras in population
The simulation will be carried out under the settings of case 2, with the hardware of Intel (R) Core (™) i7-13620H. The following three sets of parameters are used for comparative experiment.
The other parameters are chosen as in subsection 5.1.
As shown in Figure 15 and Table 8, although larger
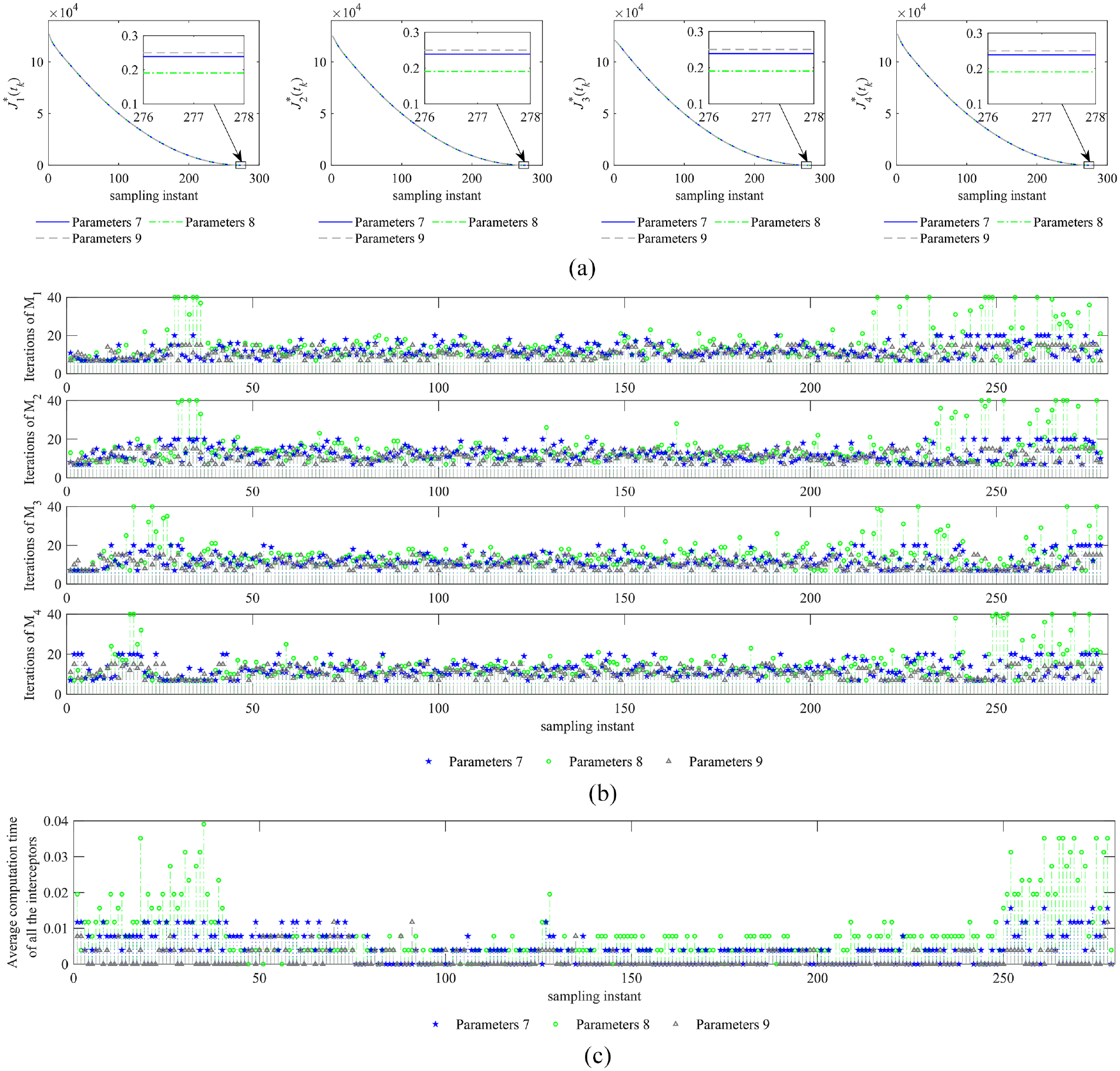
Simulation results under different parameter settings of ZOA.
Simulation results under different parameter settings of ZOA.
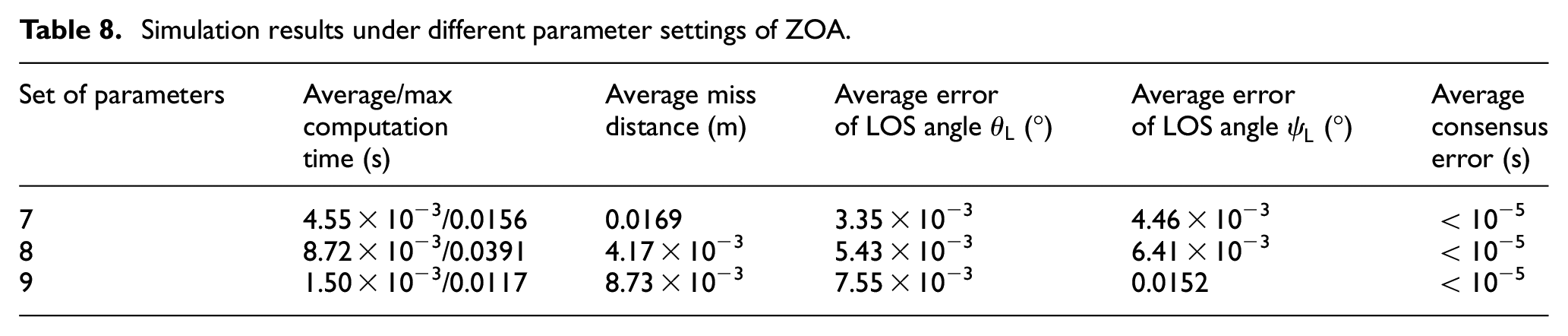
As a general rule, when the computation time does not exceed the one-tenth of the sampling period of controller, the control delay induced by computation can be neglected, so the parameters 7 and 9 are preferred from this perspective.
Conclusion
This paper presents a DMPC-based 3D cooperative guidance scheme for multiple interceptors simultaneously attacking a maneuvering target. The proposed cooperative guidance scheme consists of a FPESO and a DMPC controller, which can achieve the convergence of LOS angles and the consensus on impact time among all interceptors. The details can be summarized as follows.
(1) The FPESO is constructed and used to estimate the disturbances caused by target maneuver, which shows good performance in convergence speed and noise suppression.
(2) The ZOA is employed to solve the FHOCP of each interceptor, the optimization procedure can be carried out in a completely distributed manner owing to the use of the assumed state trajectory, whose deviation from the actual state trajectory is limited by the designed compatibility constraint.
(3) The terminal ingredients corresponding to the coupling and decoupling stage costs are developed, respectively. Applying them to the DMPC controller, the resulting FHOCP is feasible at each sampling instant, and the stability of the multi-interceptor system is also guaranteed.
(4) The effectiveness and the superiority of the proposed DMPC-based cooperative guidance scheme are verified by the theoretical proofs and simulation results.
Future study will aim to extend the proposed methods to tackle the cooperative guidance problem for multiple interceptors in the presence of enemy radars or anti-interception weapons.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the Natural Science Foundation of Shandong Province (ZR2020MF090).
Data availability statement
The data used to support the findings of this study are included within the article.