
Abstract
This article investigates the simultaneous attack problem of multiple missiles against a manoeuvring target with delayed information transmission in three-dimensional space. Based on the kinetic model of the missiles, the problem is divided into three demands: the velocity components normal to line-of-sight converge to zero in finite time, the component of motion states along line-of-sight should achieve consensus and converge to zero. The guidance law is designed for each demand and by theoretical proof, the upper bound of delay which can tolerate is presented and the consensus error of the relative distances can converge to a small neighbourhood of zero. And simulation example presented also demonstrates the validity of the theoretical result.
Introduction
The simultaneous attack problem has attracted remarkable attentions due to its applications on military. Specifically, for a well-defended target with high price, it is more efficient to use some low-price missiles, rather than single high-price missile, to hit and destroy it.
Many navigation guidance laws to achieve the simultaneous attack of multi-missiles against a static or manoeuvring target are proposed one after another. Based on traditional proportional navigation method and the limits of fixed magnitude of velocity, common impact time constraint guidance law is the first to be used in simultaneous attack. 1 To further improve the guidance effect, the impact angle or other constraints are introduced. 2 –4 Due to the development of wireless communication, the simultaneous attack problem can be realized by interacting among all missiles so that the common impact time constraint is removed. By inserting a virtual leader, followers adjust navigation constants and magnitude of acceleration to make impact time reach consensus. 5 In the study by Jeon et al., 6 a centralized guidance law is proposed for complete graphs and the consensus error of impact time has been proved to be non-increasing. Hou et al. 7 improved the results by introducing the finite-time controller to ensure the consensus achieving in finite time, and the saturation is also taken into account. Zhou et al. 8 considered the leader–follower network and verified its effectiveness. Moreover, the studies in the literature 9 –11 transformed missile kinematics equations into a quasi-double integrator model and relaxed the initial conditions of proportional guidance law.
Moreover, several other methods abandon the proportional guidance and design the law to realize consensus of relative motion states between the missiles and the target, which are usually applied to attack manoeuvring vehicles and other high-speed targets. Without the fixed speed restriction, the missiles can change their acceleration in any direction and the kinematics models of missiles are similar to multi-agent systems. By breaking down the missile motion according to the line-of-sight coordinate system (LCS), the simultaneous attack problem can be transformed to the consensus of relative velocity and distance along line-of-sight (LOS). 12 –14 Such design structure reduces the computational burden by substituting the measurement of distance between the missile and target for the impact time estimation. Hu and Yang 12 designed a guidance law to achieve rang-to-go consensus of the leader–follower multi-agent systems through optimal control. Zhou et al. 13 and Wei et al. 14 applied the method in distributed network and proposed an adaptive guidance law for undirected connected graph.
Owing to data transmission congestion and delayed signal response in channels, time delay is ubiquitous in communication network which cannot be ignored in time-sensitive simultaneous attack. In analysis, the delayed information transmission complicates the model structure and destabilizes the equilibriums which makes the guidance law design much more difficult. Olfati-Saber and Murray 15 put forward a general framework of the consensus problem in multi-agent systems for time delay. There has also been numerous results on consensus of second-order systems with time-delayed communication networks. Lin and Jia 16 investigated the consensus with fixed time-delayed communication in switching undirected graph. Zhu and Cheng 17 extended the study of Lin and Jia 16 to the leader-following systems and assumed that time-delayed information is unknown to agents. Wang et al. 18 designed a consensus protocol for leader-following systems and the leader has non-linear kinematic equation. Considering the communications with time delay and intermittent, Wen et al. 19 showed the consensus of systems by constructing a common Lyapunov function.
Motivated by the discussions above, this article intends to investigate the simultaneous attack problem of multiple missiles against a manoeuvring target, where the time delay of the information exchange among neighbouring missiles via communication topology is considered. Based on the kinetic model of the missiles, we first divide the problem into three demands. Specifically, the velocity components normal to LOS should converge to zero in finite time so that the control input wouldn’t be singular at the time the missile hits the target, while the relative distance between each missile and the target should achieve consensus and converge to zero. And then the missiles’ accelerations are designed to meet these demands, where the acceleration components normal to LOS are designed based on local information of each missile to realize the first demand, and the acceleration component along LOS is proposed based on delayed information of neighbouring missiles to achieve consensus of relative distances and make relative speed between each missile and the target converge to a desired negative constant so that the missile can hit the target. Theoretical proof shows that the designed accelerations can approximately realize the simultaneous attack task in the sense that the consensus error of the relative distances can converge to a small neighbourhood of zero.
The rest of this article is organised as follows. In the second section, some necessary preliminaries of notations, graph theory and missiles kinematic model are introduced. In the third section, a novel guidance law and its rationality in simultaneous attack analysis are represented. In the fourth section, a simulation example is performed for illustration. Concluding remarks are finally given in the fifth section.
Preliminaries
Notation
Let A be a symmetric matrix and
Graph theory
Let
Kinematic model
Considering a group of N missiles attacking against a manoeuvring target with the kinematic model in LCS described by



where

Geometry of the i-th missile attack towards the target.
To derive the main results, the following assumption is necessary.
Assumption 1
The communication graph
Assumption 2
The target acceleration has a known bound
Under Assumption 1, the Laplace matrix
To ensure that each missile is able to hit the target without deflection, it requires LOS to maintain a fixed direction or nullifies
ri
,
ri
,
Remark 1
In actual application, due to the limit of the measurement precision, we cannot expect that missiles hit a target at the same time precisely. Thus, the subtask (2) Could be re-described as the consensus error of ri is ultimately uniformly bounded in the neighbourhood of zero.
In this article, the object is to design a cooperative guidance law
Lemma 1
Let

Main result
In this section, it is assumed that the information transfer among missiles has fixed time delay. Based on the time-delayed information of neighbouring missiles, the cooperative guidance law is designed as following

where k
1, k
2, k
3,
First, we analyse the convergence of
Lemma 2
Suppose that Assumption 2 holds. The component of the ith missile velocity in
Proof
Substitute (5) and (6) into (2) and (3) and we have

Where

For

where t 0 is the initial time.□
Let

where

where

Lemma 3
Consider the delayed system (10) and suppose Assumptions 1 and 2 hold. By choosing the control parameters

where

with

where
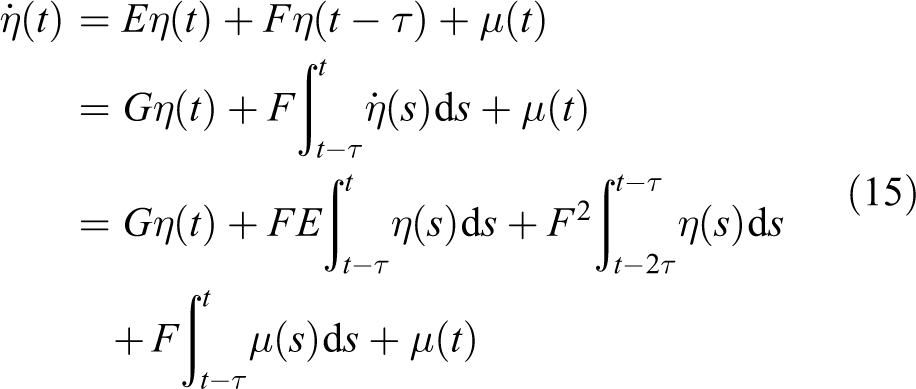
Proof
By the Newton–Leibniz formula, we have
Construct the Lyapunov function

where

and

The time derivative of

Note that
and
For
Since

we have
Notice that

In light of the definition of

Thus we have

By (11),
Remark 2
It should be noticed that

which in turn implies that there exists c satisfying (12).
Based on the above-mentioned analysis, we give the main result in this article:
Theorem 1
Consider the model of multiple missiles attack against a manoeuvring target as described in (1), (2) and (3). The simultaneous attack problem can be approximately solved under the cooperative guidance law (4), (5) and (6) if

Proof
According to Lemma 2, there exists a finite time T such that
From Lemma 3, if time delay
When

which implies that

Particularly, (24) ensures that
Simulation
In this section, simulation result is given to illustrate the effectiveness of the proposed guidance law.
Consider the case of five missiles denoted by

Communication topology.
The initial state of the target and missiles.


Then the detailed parameters are selected as
The sign function in (5) and (6) can be processed by continuous approximation of saturation function to avoid chattering phenomena.
The trajectories of missiles and target in three-dimensional space are shown in Figure 3 where each missile hits the target almost at the same time. Figures 4 and 5 describe the states along LOS, where ri
and

Trajectory of missiles and target.

Relative distance between missiles and the target.

Relative speeds component of along

Relative speeds component of along

Relative speeds component of along
Conclusion
This article proposes a cooperative guidance law to realize the simultaneous attack of multiple missiles against a manoeuvring target under time-delayed communication topology. By dividing the attack problem into three parts, the missiles’ accelerations are designed to meet these demands. Moreover, the tolerate bound of delay and the consensus error of the relative distances are also presented. Future work will be focused on solving the simultaneous attack under the communication with time-varying delays and the case of switching communication topology is also an interesting issue 22 which can further relax the network condition.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article was supported by the National Natural Science Foundation of China under Grant 61903083, the Natural Science Foundation of Jiangsu Province of China under Grants BK20190333 and BK20180459, and the Fundamental Research Funds for the Central Universities through Grants Nos 30919011291, 4007019104, and 2242019K40111.