
Abstract
Parametric uncertainties and inverter nonlinearity exist in the permanent magnet synchronous motor (PMSM) drive system, which may lead to performance degradation or failure of model-based control. This paper presents an enhanced model-free synergetic control method for PMSMs, addressing the limitations of relying on accurate motor models in existing speed control strategies. The proposed approach aims to achieve robust control performance in the presence of parameter perturbations without the need for an accurate motor model. Firstly, a new ultra-local model of the speed loop for the PMSM is established based on a newly developed ultra-local theory. Subsequently, a model-free synergetic controller is designed using the principles of synergetic control theory. To address the issue of output chattering in the sliding mode observer used to estimate the unknown part of the ultra-local model, a synergetic observer method is proposed. Simulation results are presented and compared with those obtained using a proportional-integral (PI) controller and a conventional model-free sliding mode controller. The results demonstrate that the model-free synergetic controller exhibits robust performance and provides accurate estimation of the unknown part without output chattering.
Keywords
Introduction
Permanent magnet synchronous motors (PMSMs) are widely utilized in various fields such as electric vehicles, robotics, and aircraft due to their advantages of high power factor, efficiency, and fast dynamic response.1–4 In the realm of permanent magnet synchronous motor (PMSM) control, field-oriented control (FOC) stands out as a strategy boasting excellent steady-state performance. The fundamental principle of FOC involves the decoupling of torque and flux by transforming stationary phase currents into a rotating frame. Presently, the conventional proportional-integral (PI) control strategy remains prevalent in the majority of PMSM regulation systems due to its simplicity and ease of implementation. However, it’s crucial to acknowledge that PMSM is a multivariable, strongly coupled, and nonlinear complex system that is susceptible to the influence of parameters and load disturbances. 5 Implementing FOC with a PI controller necessitates tuning the controller’s parameters. Importantly, PMSM drive systems introduce parametric uncertainties and inverter nonlinearity. 6 Consequently, the quest for a control algorithm capable of effectively enhancing the robustness of the speed control system has become the focal point of motor speed regulation research. This pursuit is essential for overcoming the challenges posed by the intricate nature of PMSM and ensuring reliable performance under varying conditions and disturbances.
Up to now, model-based control methods have been the main control method for motor control problems. In recent years, numerous motor control strategies have been developed and researched to achieve high driving performance for PMSMs, including but not limited to synergetic control (SC),7,8 sliding mode control (SMC),9,10 model predictive control (MPC),11,12 and fuzzy logic control.13,14 These control techniques have addressed some limitations of PI control, such as sensitivity to uncertainties in motor parameters and inaccurate modeling, but they still rely on accurate motor models for control. While current technology enables the establishment of more accurate permanent magnet synchronous motor (PMSM) models across diverse operating conditions, the modeling process remains time-consuming. Moreover, control methods relying on precise models are susceptible to variations in motor parameters and alterations in both internal and external structural distributions. As the motor operates, factors like temperature rise and magnetic field saturation impact motor parameters, leading to parameter drift, model mismatch, and a subsequent decline in motor control performance. 15 Hence, there is a compelling need to delve into research aimed at enhancing the robustness of PMSM systems against fluctuations in parameters, internal disturbances, and external disturbances. Such endeavors are crucial for achieving improved speed tracking performance despite the dynamic and changing nature of motor operations.
Model-free control (MFC) is robust to uncertainties without requiring a mathematical model of controlled system. 6 To reduce the reliance of control systems on accurate motor models, a model-free control (MFC) method,16,17 which approximates the whole nonlinear dynamic system 6 using an ultra-local model, 18 has been applied to motor control. Parameter uncertainties and inverter nonlinearity may lead to performance degradation or failure of PMSM system. Currently, PMSM control studies based on MFC are focused on improving the current and speed performance of PMSMs, both dynamic and static. Aiming at the model mismatch due to parameter uncertainties and inverter nonlinearity, previous studies have solved current distortion, torque pulsation, current control performance degradation,19,20 speed control performance degradation 21 and unstable operation by using the MFC. The reliability and robustness of PMSM speed or current controller design can be improved by the MFC method using measured input and output data. Yuan et al. 19 proposed a novel model-free predictive current control method using an extended state observer (ESO) for SPMSMs. The parameter mismatch can be suppressed effectively. Zhou et al. 20 established the predictive ultra-local model of the surface mounted PMSM (SMPMSM) system to identify the voltage future states. The optimal voltage vector was synthesized to improve the current responses. Gao et al. 21 provided a model-free hybrid parallel predictive speed control (MF-HPPSC) method to improve the robustness of parameter mismatch. The unique linear ESO with an ultra-local model and multi-objective parallel predictive speed control structure were designed to enhance the steady-state performance of the system. Based on research into MFC theory, Hou first proposed the theory of model-free adaptive control (MFAC), 22 which is a data-driven control method for discrete-time nonlinear systems to improve modeling difficulties.23,24 Building upon the MFAC method, some researchers have investigated the speed control problem of PMSMs. A novel approach was proposed combining model-free adaptive discrete-time integral terminal sliding mode control (MFA-DITSMC) and non-linear disturbance observer (NDO) for speed control. Simulation and experimental results demonstrated that this method exhibited excellent dynamic response and strong robustness. 25 But the method only utilized input-output data at the current time. Wang and Hou 26 proposed a novel model-free adaptive predictive control (MFAPC) method for PMSM speed control to further enhance the robustness of the control system. Zhao et al. 27 proposed a model-free sliding model control (MFSMC) method to design a speed controller for PMSMs, which significantly improved control accuracy and robustness compared to PI control. However, the use of a sliding mode observer (SMO) to estimate the unknown part of the system resulted in output chattering. To further improve control performance, their research group introduced a novel ultra-local model and designed a new model-free sliding mode controller based on an extended sliding mode disturbance observer (ESMDO). 28 This method reduced the dependence on accurate motor models, and ESMDO effectively suppressed output chattering, although some chattering still remained. In addition, MFC-based PMSM speed and current controllers were developed to deal with permanent magnet demagnetization faults and disturbances. 29
To achieve excellent control performance of PMSMs under parameter perturbations, this paper proposes a novel model-free synergetic control (MFSC) method, making the following contributions:
(1) A novel MFSC method is proposed to design a speed controller for PMSMs, reducing the reliance on accurate models and enhancing control robustness.
(2) To address the chattering issue in the sliding mode observer, a synergetic observer (SO) is designed to estimate the unknown part of the ultra-local model, ensuring no output chattering.
(3) The speed controller designed based on MFSC exhibits stronger robustness compared to PI control and conventional MFSMC, and provides accurate estimation of the unknown part without output chattering in the ultra-local model.
Overall, the proposed MFSC method represents a significant advancement in PMSM speed control, enabling improved control performance under parameter perturbations by reducing the reliance on precise models and effectively addressing the output chattering issue associated with traditional control approaches. The subsequent sections of this paper will present the details of the proposed method and the simulation results, validating its effectiveness and robustness in achieving high-quality control of PMSMs.
The ultra-local model for PMSM speed loop
The existing mathematical model of the PMSM is ideal, where internal parameters such as resistance and inductance undergo variations during the actual operation of the motor, resulting in the influence of parameter uncertainties on the established motor model. PMSM drive systems involve parametric uncertainties and inverter nonlinearity. 6 Notably, this paper focuses only on parametric uncertainties rather than inverter nonlinearity. Hence, the PMSM voltage equation perturbed by parameters is
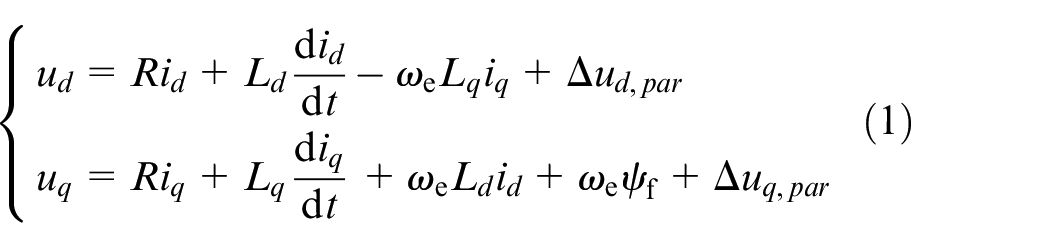
where ud and uq represent d-q axis voltage; id and iq represent d-q axis current; R is the nominal value of stator resistance; Ld and Lq represent d-q axis inductance, and Ld = Lq in the surface PMSM system; Ψf is permanent magnet flux linkage. The amount of voltage disturbance is as follows:
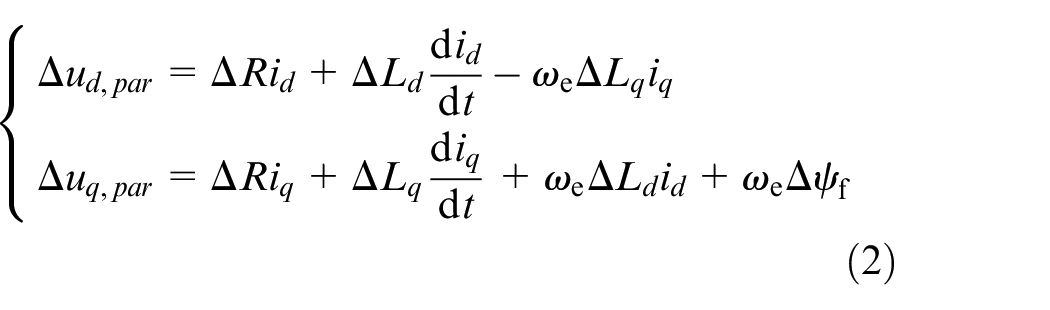
where
The PMSM electromagnetic torque equation under parameter perturbation is

where Te is the electromagnetic torque; np is the number of pole pairs in PMSM;

The mechanical motion equation of PMSM is

where J is the moment of inertia,
According to (3) and (5), the PMSM speed state equation of parameter perturbation is obtained.

where ωe is electrical angular velocity of the motor.
The ultra-local model which is an affine dynamic model with regards to the control input variable, includes a lumped unknown nonlinear function and a priori-known constant input gain. Here, the new ultra-local model of a nonlinear system from the theory28–30 is expressed as

where
According to the PMSM speed state (6) and the new ultra-local model (7), the new ultra-local model of the PMSM speed loop is established.

where α and β represent the speed gain and stator current gain to be designed respectively; F is continuously updated, subsumes the poorly known parts of the plant as well as of the various possible disturbances, without the need to make any distinction between them. 18
Design procedure for model-free synergetic speed control
The block diagram of model-free synergetic controller of PMSM system is shown in Figure 1. The feedback controller in the controller is a synergetic controller, and the unknown part F is estimated by a synergetic observer.
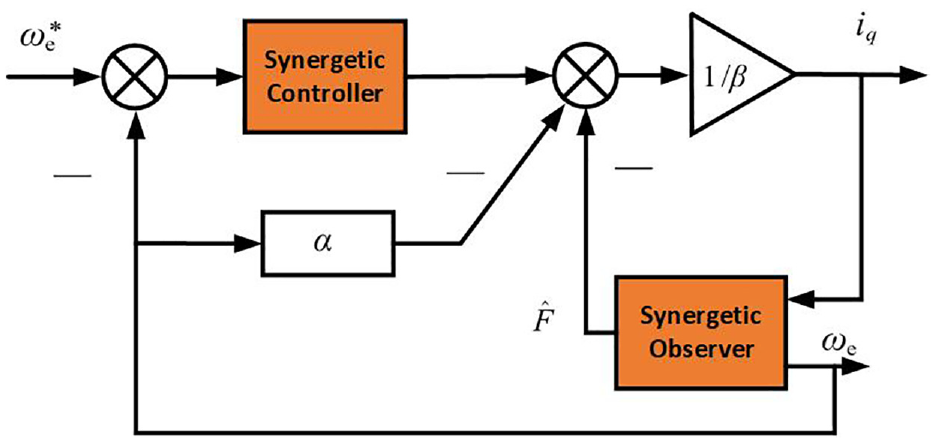
Block diagram of model-free synergetic controller.
Design of model-free synergetic controller
According to the synergetic control theory,31,32 the convergence equation for nonlinear systems is expressed as

where TSC is a time constant, which determines the speed at which the system macro-variables converge to the manifold Ψ, defined as 33

where k1 and k2 are gain constants, and
Substituting (10) into (9), the synergetic control model of motor speed is obtained.

According to (8) and (11), the model-free synergetic control law of PMSM vector control system speed loop is established.

Observation of unknown input based on synergetic observer
Design a synergetic observer (SO) to estimate the unknown part F of the model-free synergetic control law in (12). Then the ultra-local model of PMSM speed can be expressed as
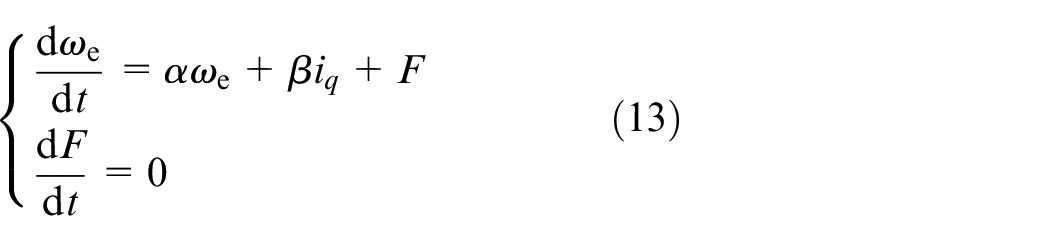
The synergetic observer system 34 is

where


where e1 and e2 represent the velocity observation error and the observation error of the unknown part of the system, respectively.
The SO estimation system of the unknown part is as
The SO estimation system in (17) can make the system observation error converge to 0 within a limited time by selecting appropriate coefficients
Proof: Simultaneous (13) and (17), the state observation error is expressed as
The Lyapunov function of error e1 is expressed as

Differentiating V and combining it with (18), we obtain
To ensure that the system reaches the manifold in a finite time, the parameter m1 should satisfy the condition that

Combined with (18), the observation error equation of the unknown part can be obtained as

According to the synergetic control theory, the conditions for system stability are m2/m1 > 0, m2 > 0, and the observation error of the unknown part is expressed as

Therefore, choosing appropriate coefficients α, β, TSO, m1, and m2 can ensure the asymptotic stability and convergence of the SO estimation system. This completes the proof.
Result and discussion
To validate the effectiveness of model-free synergetic control (MFSC), a simulation comparison is conducted with traditional proportional-integral (PI) control and conventional model-free sliding mode control (MFSMC). The block diagram of the permanent magnet synchronous motor (PMSM) vector control system based on MFSC is illustrated in Figure 2. The nominal parameters of the surface mounted PMSM (SMPMSM) used in the simulation, as well as the design parameters of MFSC, are presented in Table 1.
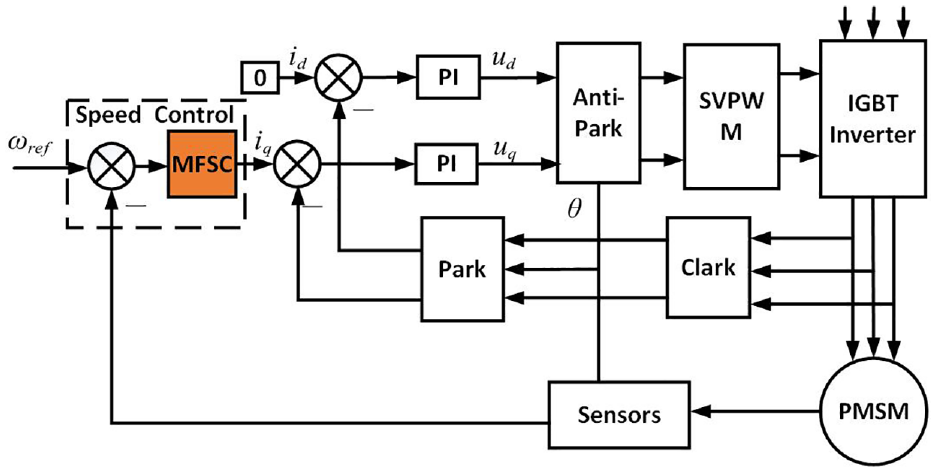
Control block diagram of PMSM system.
Simulation parameters.
The initial speed of the motor is set at 750 r/min, which increases to 1000 r/min at 0.1 s. The motor starts in an unloaded condition, and a 5 N·m load is applied at 0.2 s. The resistance is adjusted to 1.5R to represent the variation in motor parameters, while other parameters remain at their nominal values.
Figure 3 illustrates the speed response and speed error curves for the three methods with nominal parameters. Table 2 presents the comparative data for the three methods with nominal parameters. Some interesting phenomena can be obtained in Figure 3 and Table 2. A sudden change in speed occurs at 0.1 s, and both MFSC and MFSMC exhibit less speed overshoot compared to PI control. The load is abruptly applied at 0.2 s. The MFSC and MFSMC offer not only small speed dropout, but also fast steady-state recovery. At this point, the PI control exhibits a large speed drop and a long steady state response time. The steady state recovery time of the MFSC is about 12.3% that of the PI controller. However, it can be also found that the PI has a smaller error in steady state speed tracking. Overall, the MFSC is able to achieve similar performance to the MFSMC, with greater robustness than the PI controller under sudden speed or load perturbations.
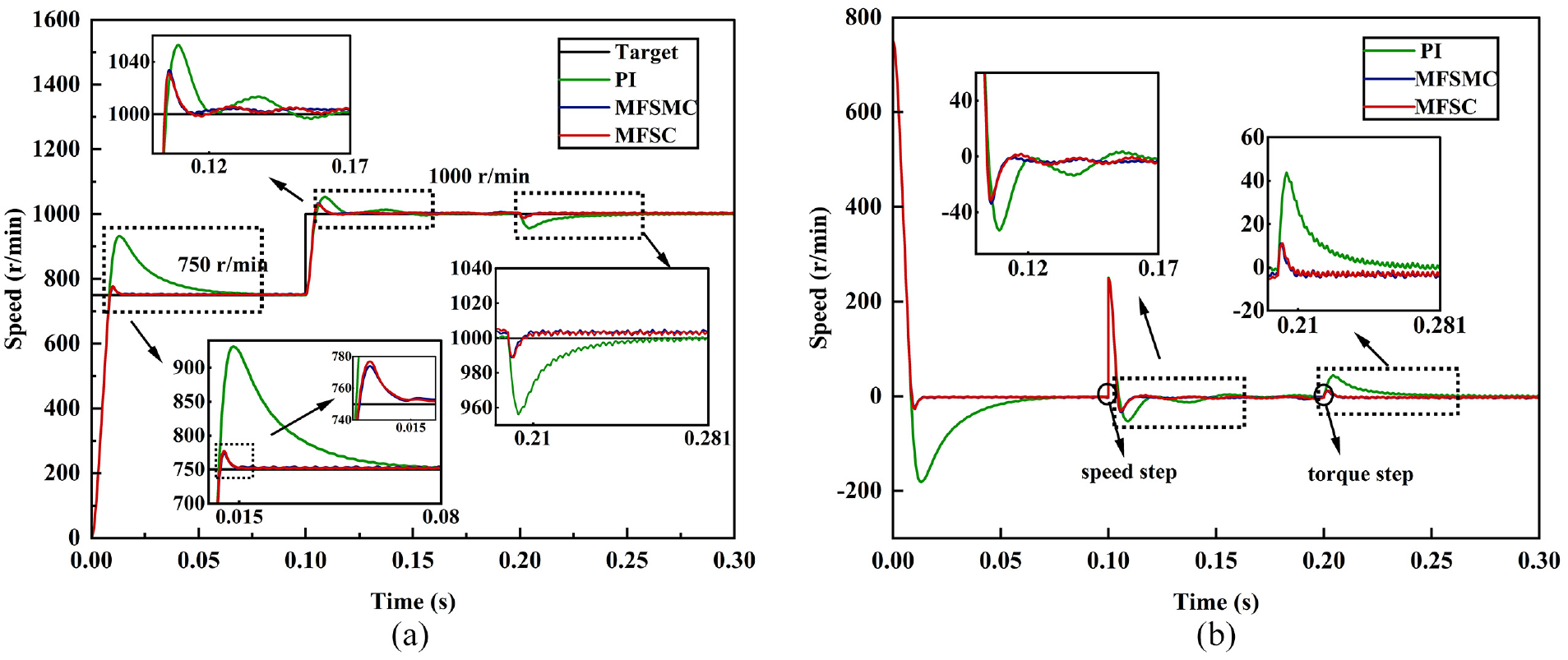
Speed response and its error of three methods with nominal parameters: (a) speed response and (b) speed error.
Speed comparison data of three methods with nominal parameters.
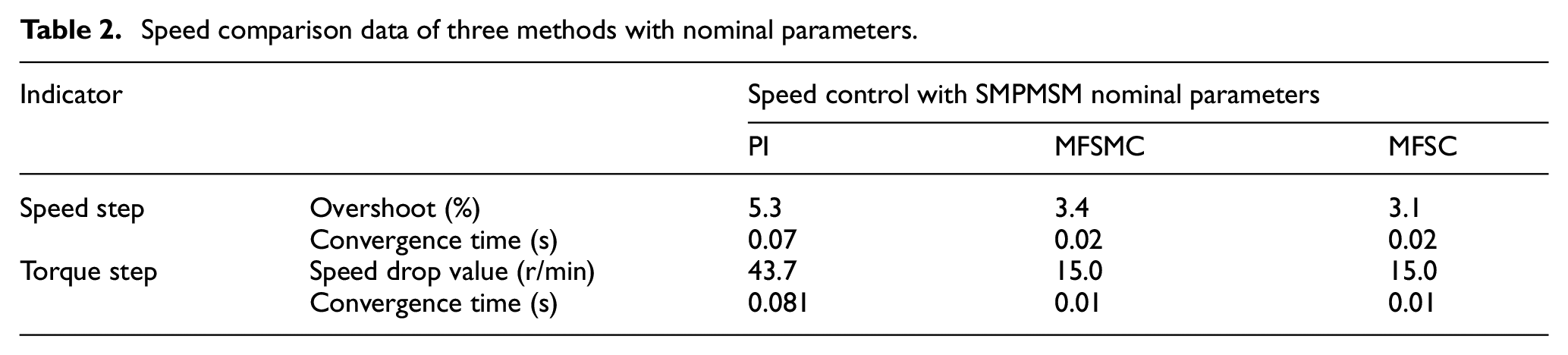
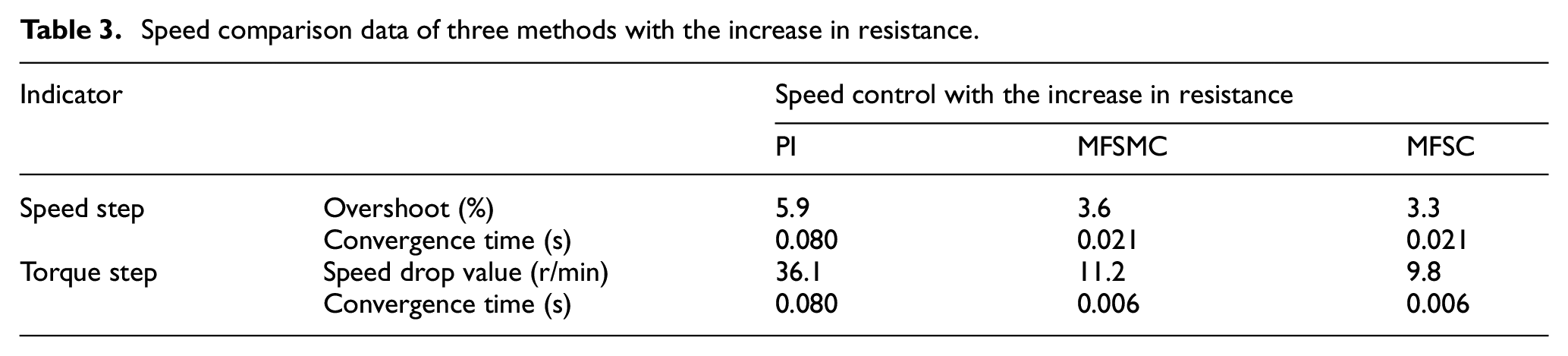
Figure 4 presents the speed response and speed error curves for the three methods with variations in SPMSM parameters. Table 3 provides the comparative data for the three methods under changed parameters. A sudden change in speed occurs at 0.1 s, and MFSC and MFSMC are nearly identical in terms of speed overshoot and convergence time. The overshoot of PI is about 1.8 times that of MFSC. The load is abruptly applied at 0.2 s. The PI controller exhibits a large speed drop and a long convergence time. MFSC and MFSMC have a smaller difference in speed drop, and the convergence time is the same. Therefore, with the increase in SPMSM resistance, MFSC still has similar performance to MFSMC and is more robust than PI speed control.
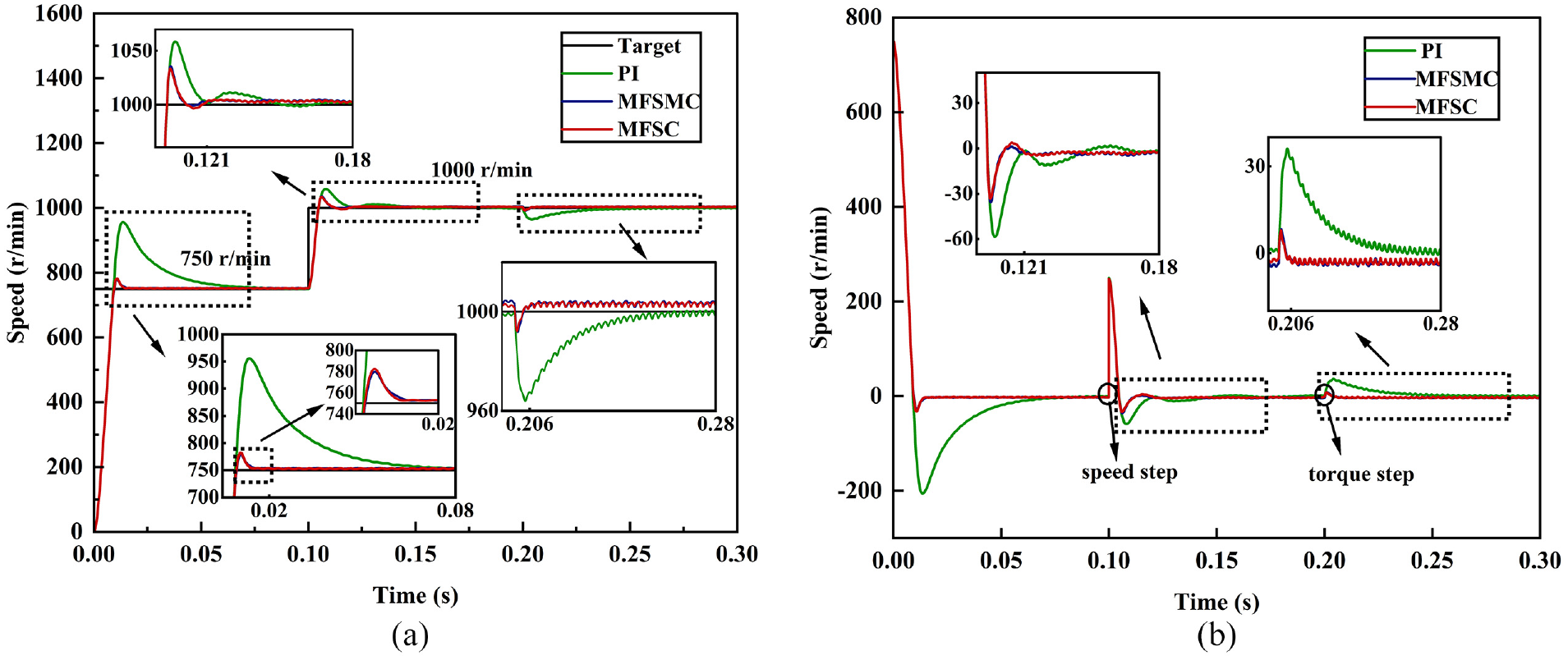
Speed response and its error of three methods with the increase in resistance: (a) speed response and (b) speed error.
Speed comparison data of three methods with the increase in resistance.
Figures 5 and 6 depict the d-q axis current response and the current spectrum of the ia component for increasing resistance, respectively. Figure 5 shows that the MFSC has a shorter time to recover the steady state of the d-q-axis current during sudden speed and load changes compared to the PI controller. The fluctuation of the d-axis current response curve of the MFSC is smaller than that of the MFSMC during sudden changes in motor load. Figure 6 reveals that the total harmonic distortion (THD) of the stator current ia for PI control, MFSMC, and MFSC after the motor load is 513.89%, 400.78%, and 400.72% respectively, gradually decreasing in magnitude. Therefore, when the resistance parameter is increased, the MFSC exhibits similar current response performance to the MFSMC and has better current harmonic rejection and a shorter steady-state convergence time than the PI controller.
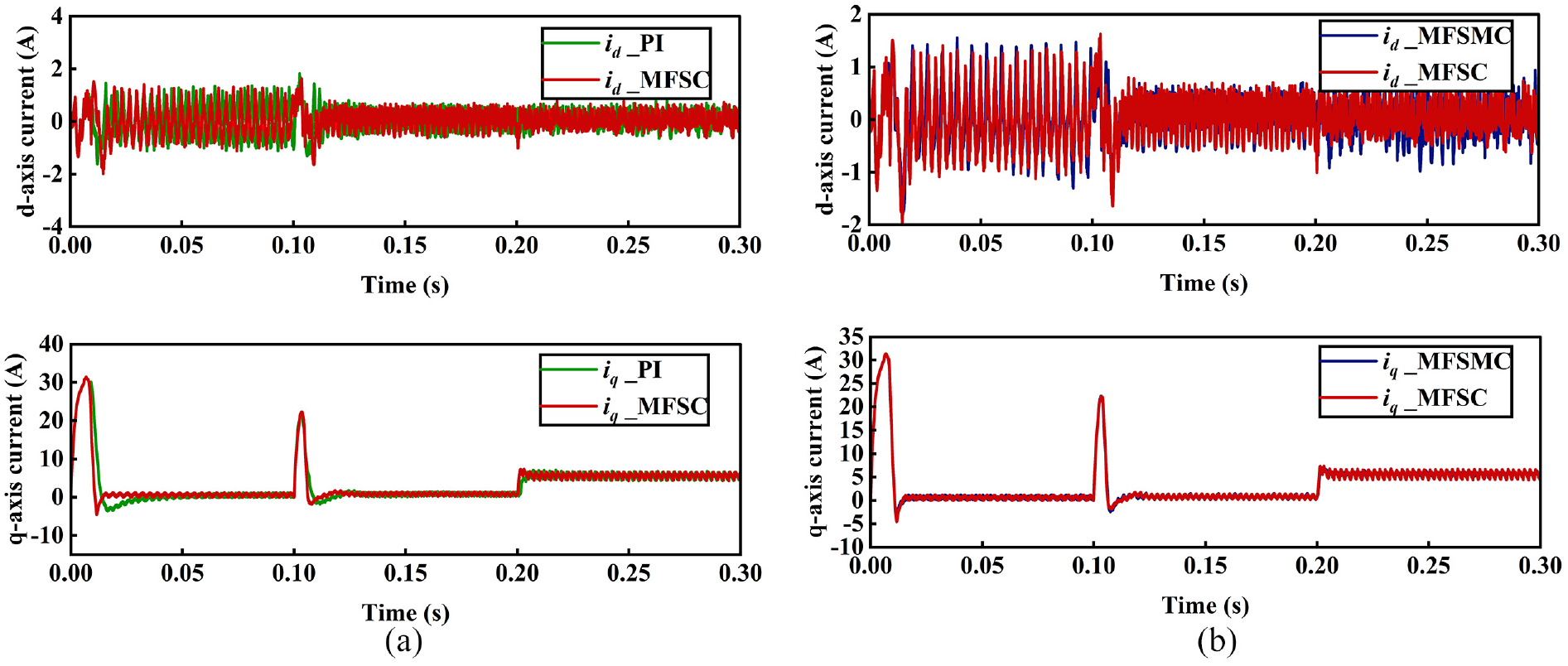
d-q axis current response with the increase in resistance: (a) PI and MFSC and (b) MFSMC and MFSC.
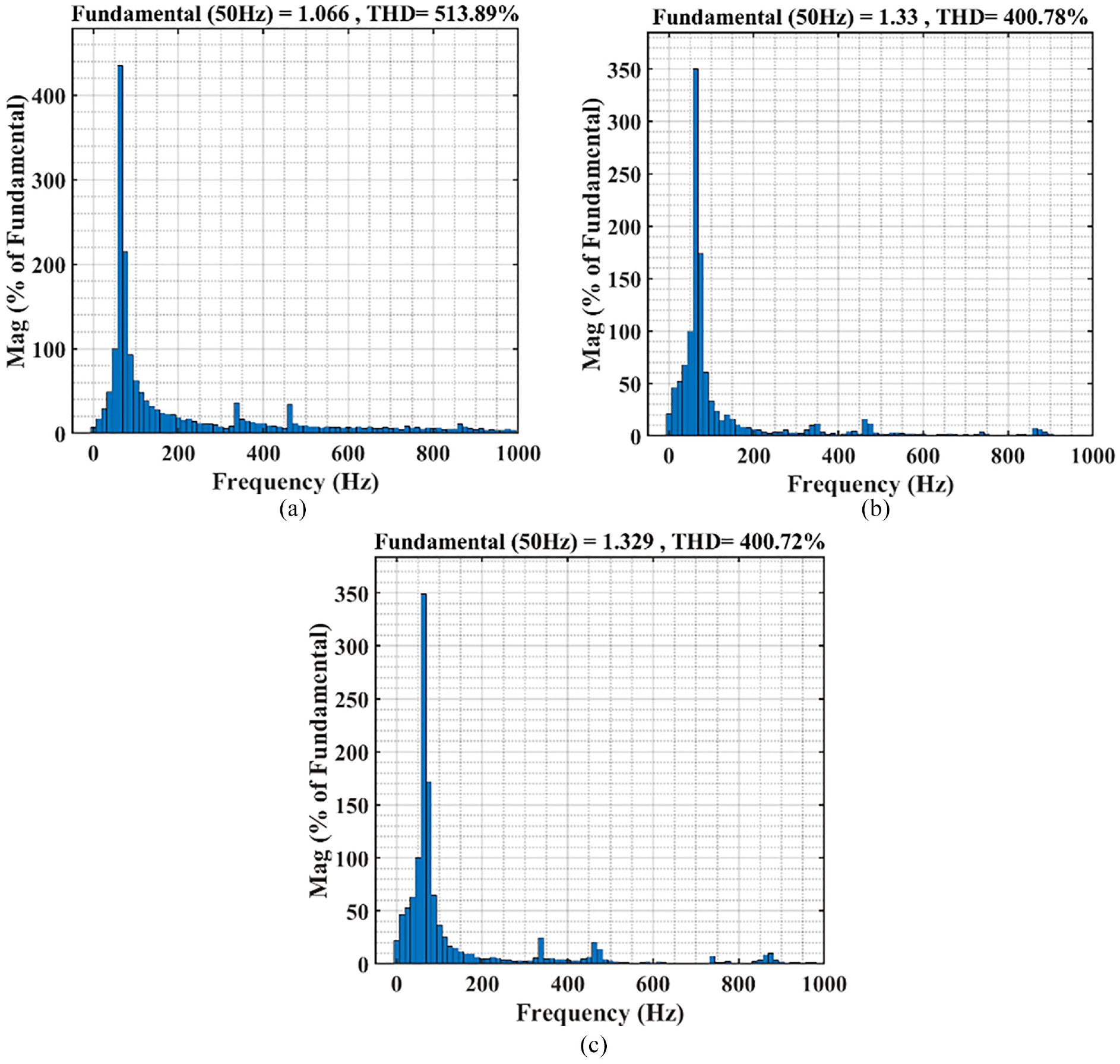
Frequency spectra of current ia with the increase in resistance: (a) PI control, (b) MFSMC, and (c) MFSC.
Figure 7 illustrates the torque response curve with the increase in resistance. It can be observed that MFSC produces a torque waveform with a shorter steady-state convergence time compared to PI control, while the torque curve coincides with that of MFSMC, indicating that MFSC achieves the same torque response as MFSMC and performs better than PI control.
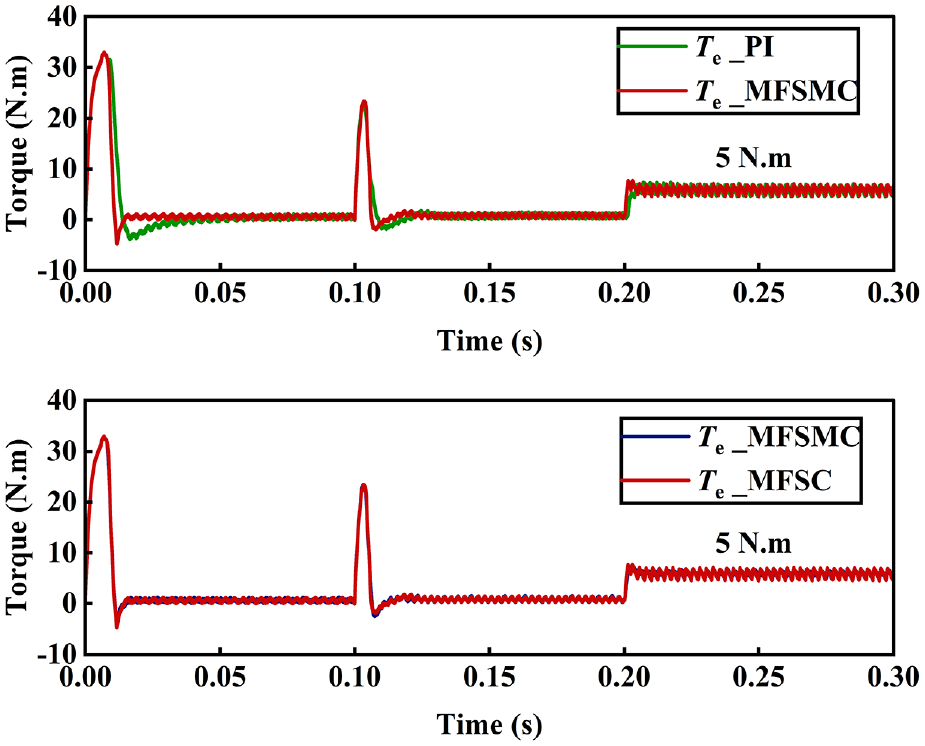
Torque response with the increase in resistance.
Figure 8 presents the observed value of the unknown part F of the super-local model in both MFSC and MFSMC. It can be seen that MFSC suppresses the output chattering when observing the unknown part compared to MFSMC. Notably, MFSC effectively mitigates output chattering in comparison to MFSMC. The chattering issue arises from the switching function of the sliding mode convergence law in traditional sliding mode observers (SMOs). However, the synergistic observer introduced in this study relies on a continuous control law to converge to the system manifold. The comparison between MFSC and MFSMC, along with the simulations conducted previously, underscores that MFSC exhibits performance similar to MFSMC while simultaneously suppressing output chattering. This observation reinforces the efficacy of MFSC in achieving comparable control performance to MFSMC while addressing and mitigating the chattering phenomenon.
Observed value of the unknown part F.
To further illustrate the robust control capabilities of MFSC and its effectiveness in suppressing chattering, a new simulation was executed using a different surface permanent magnet synchronous motor (SPMSM) system. The parameters for this new SPMSM system are referenced from. 35 The target speed is 1000 r/min and the motor load setting is shown in Figure 9. The changed parameters are resistance and inductance, which are 2.0Rnew, 0.95Lnew.
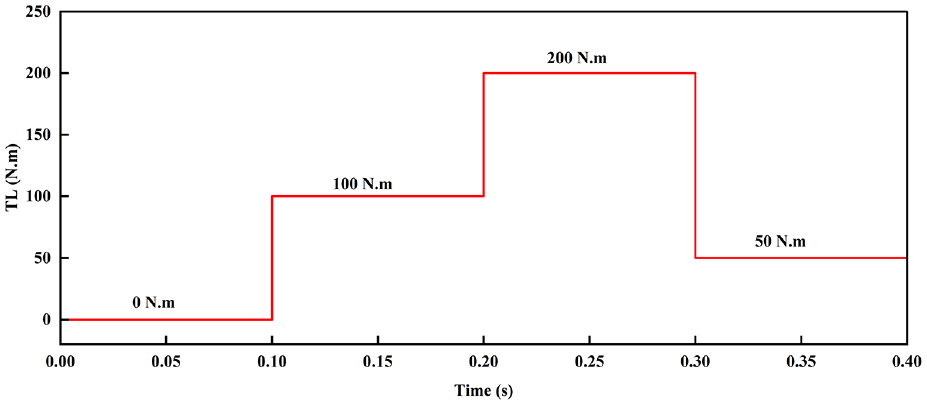
The load variation curve.
Figure 10 provides the speed curves considering the load variation, and the SPMSM parameters are nominal. Figure 11 provides the speed curves considering the variation of load and motor parameters. The data from the simulation results is given in Table 4. When only the load variation is considered, it can be found that the load demand or load drop gives the PI a larger speed fluctuation compared to the MFSC and MFSMC. The speed drop and steady state convergence time of the MFSC are not much different than those of the MFSMC, and it has a shorter convergence time than that of the PI. When the load and parameters are varied, a large change in the convergence time can be observed compared to the case where only the load is varied. Fortunately, the conclusion obtained for only load variations is still true. MFSC has a similar performance to MFSMC and outperforms PI control.
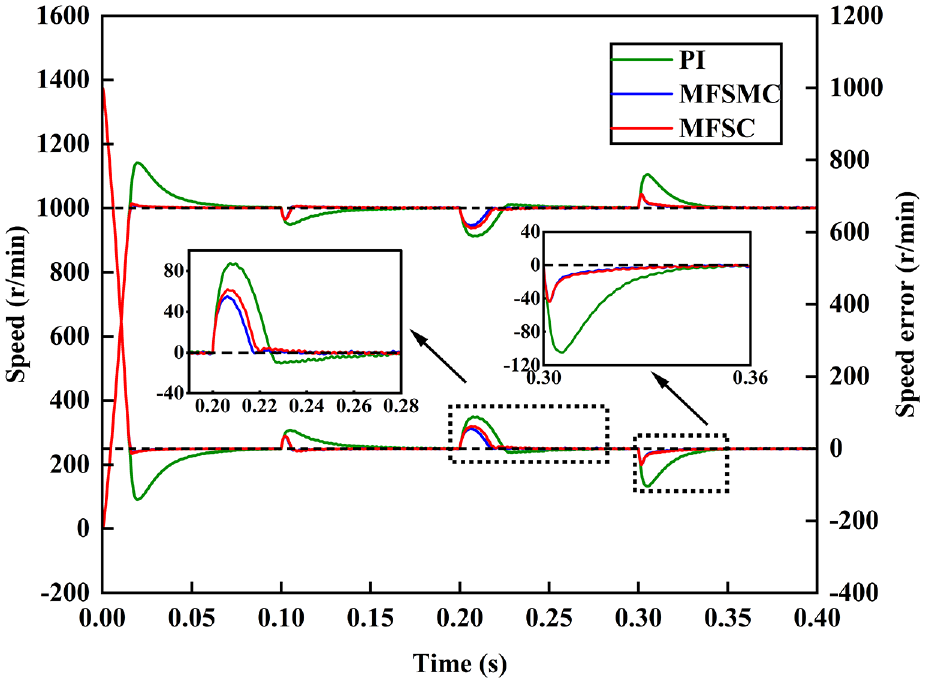
Speed curves under load variation.
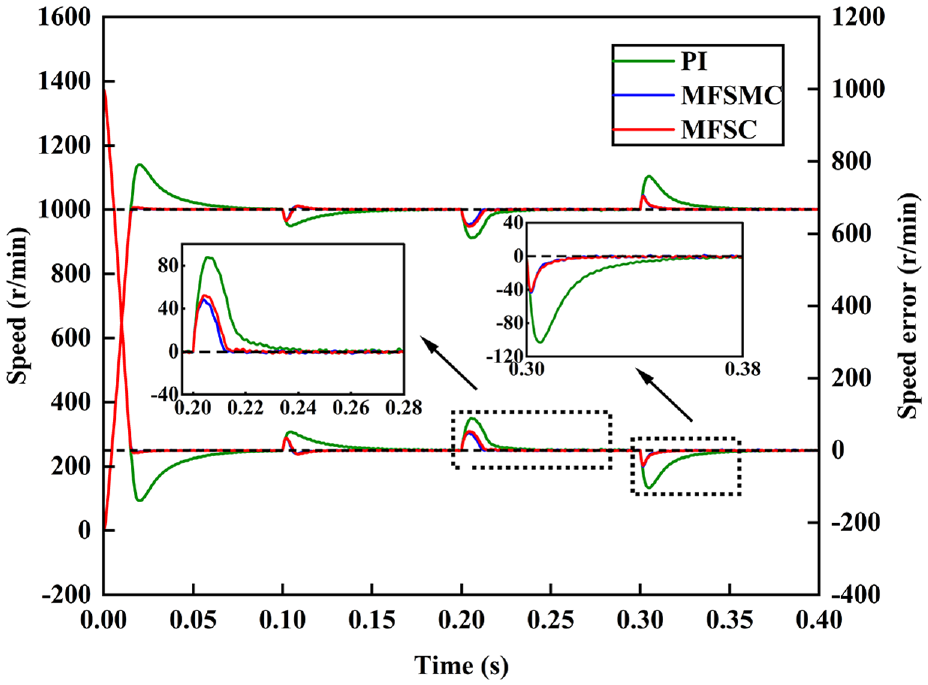
Speed curves under load and parameter variation.
Speed comparison data of three methods.
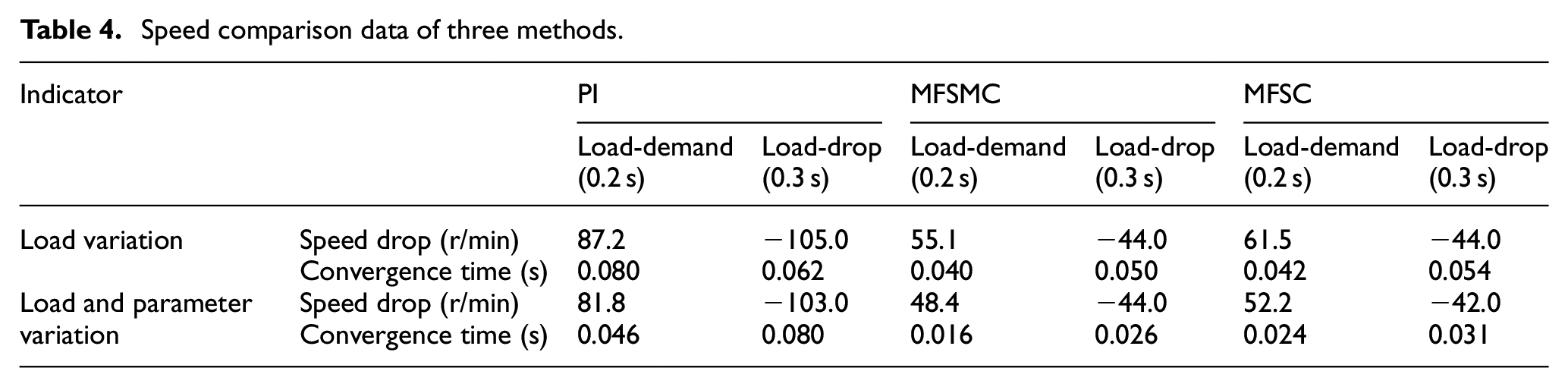
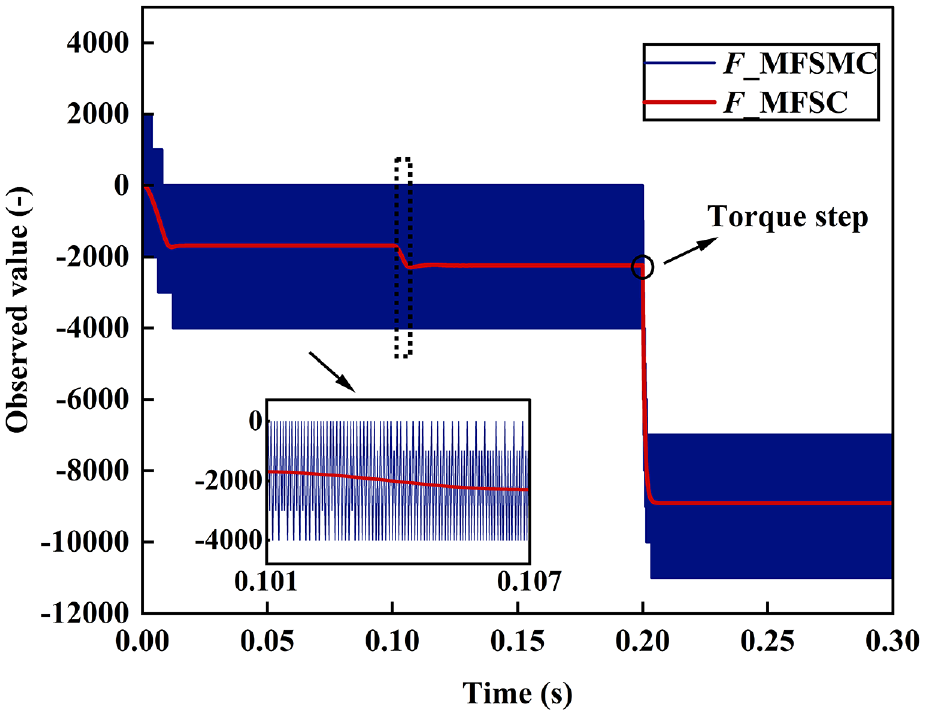
Figure 12 shows the observed curves of the unknown part of the super-local model in both MFSC and MFSMC. The chattering of the conventional SMO-based MFSMC is obvious, while the SO-based MFSC can suppress the chattering drastically. In conclusion, the simulation results on different SPMSM motor systems show the potential of MFSC in improving speed control performance. MFSC is more robust than the PI controller in the case of nominal and variable motor parameters and can realize speed control performance similar to that of MFSMC with effective vibration suppression.
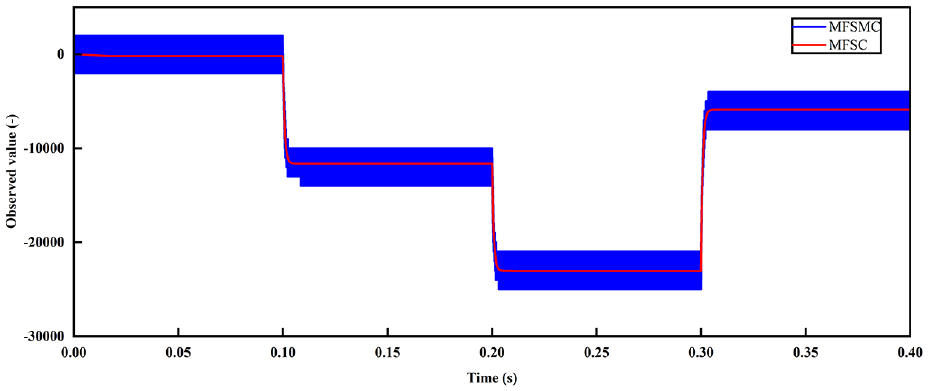
The observed curves of the unknown part.
Conclusion
Parameter uncertainty may lead to the performance degradation of speed control based on the accurate PMSM model. The proposed model-free synergetic controller leverages the advantages of the ultra-local model and the synergetic control method, providing improved control performance for the speed control of PMSMs. By employing a synergetic observer (SO), the controller is able to estimate the unknown part of the ultra -local model, enhancing the robustness of the control system. Results demonstrate the superior performance of MFSC compared to traditional PI control and conventional MFSMC under parameter variations. MFSC exhibits better speed response, improved suppression of current harmonics, and stronger robustness. Additionally, it achieves accurate estimation of the unknown part without any output chattering, indicating its effectiveness in dealing with system uncertainties. However, it is important to note that the introduction of the MFSC increases the complexity of the control system. This complexity may pose challenges in practical implementation and implementation on real-time hardware platforms. Therefore, future efforts should be directed toward reducing the complexity of the controller design while maintaining its effectiveness and performance.
In conclusion, the proposed model-free synergetic controller with a synergetic observer shows promising results in the speed control of PMSMs. It offers improved control performance, robustness against parameter variations, and accurate estimation of the unknown part. Future endeavors will delve deeper into the simplified design aspects of the controller and its experimental verification, paving the way for a more comprehensive understanding and potential application of this novel control approach in practical.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Ningbo Science and technology project of China (No. 2019B10111) and National Key R&D Program of China (NO. 2018YFB0106403). The authors also acknowledge the Open Fund of Hubei Key Laboratory of Power System Design and Test for Electrical Vehicle (ZDSYS202301), Hubei Superior and Distinctive Discipline Group of “New Energy Vehicle and Smart Transportation.”
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.