We consider a hypersonic vehicle optimal flight control problem. The problem is modeled as an optimal control problem of switched systems (OCPSS), which can become a parameter optimization problem (POP). Following that, to achieve the globally optimal solution of the POP, an improved continuous filled function (CFF) algorithm including one adjusting parameter is proposed based on a penalty function, in which the CFF is differentiable, excludes logarithmic terms or exponential terms, and does not require to minimize the cost function. Numerical results show that the proposed algorithm is effective.
The hypersonic vehicles has been attracting researchers because of the two successful flight tests of the X–43A conducted by National Aeronautics and Space Administration.1 The correlation technologies, such as integrated design technology, aerodynamics and aeroheating technology, high-temperature long-time thermal protection technology, and hypersonic propulsive technology, etc, have been extensively investigated.2 The guidance and control technology is a crucial technologies of hypersonic vehicles, which is to ensure their efficiency and feasibility.3 However, the guidance and control technology must have high precision, high reliability, and strong adaptability.4,5 Thus, many key problems, such as reentry guidance, rapid trajectory changing, trajectory optimization, flight guidance, and so on, urgently need to be addressed.6 In order to achieve these goals, the flight path optimization is essential for hypersonic vehicles.7
The optimal control problem of switched systems (OCPSS) includes choosing a control input and a switching sequence such that a system performance is optimized.8 It is still a challenging problem to obtain a solution of the OCPSS.9 To overcome the challenging, maximum principle (MP) and dynamic programing (DP) are extended to switched systems.10 By using the MP, one can solve the simple OCPSS analytically. But, in application, the problem may be too complex and big, which leads to the use of a modern computer is unavoidable.11 For the DP, it require to solve a Hamilton-Jacobi-Bellman (HJB) equation. Although the HJB equation has already had a firm theoretical foundation to solve, the OCPSS can not be solved analytically in general.12 Some numerical algorithms have been proposed for solving the OCPSS.13 One well-known algorithm is the bi-level optimization method.14 The other alternative approach is the method based on the embedding technique.15,16 In addition, an improved bi-level optimization method17 and an improved mixed-integer optimal control approach18 have also been developed for solving the OCPSS. Unfortunately, the solutions obtained by using these methods are usually locally optimal solutions instead of globally optimal solution, and the amount of calculation and the convergence rate of these methods are still less encouraged.
Recently, to solve global optimization problems, some algorithms have been developed. Generally speaking, we can divide these algorithms into two categories: deterministic algorithm (DA) and probabilistic algorithm (PA). The DA involves the trajectory approach,19 auxiliary function approach,20 covering approach,21 etc. Simulated annealing algorithm,22 genetic algorithm,23 differential evolution,24 and particle swarm optimization25 are several typical algorithms of the PA. Note that most of the optimization problems usually own many local minimizers in practical applications. Thus, the key of obtaining a global solution is choosing a method to escape from the present local solution. As a typical DA, the CFF is designed for global optimization problems.26 However, the existing CFF either require more than an adjusting parameter,27 involve ill-conditioned term (logarithmic terms or exponential terms),28 or are non-differentiable (even discontinuous).19 In addition, the general framework of the CFF implies that the local solution of the CFF is usually not the local solution of the original optimization problem, and a better local solution achieved require to solve the original optimization problem. Thus, if the CCF has the same local solution of the original optimization problem, and the local solution is better than the present solution of the original optimization problem, then a local solution of the CFF will be a better local solution of the original optimization problem. Then, the efficiency of the CFF will increase significantly.
In the route planning problem for a hypersonic vehicle, the optimal speed cruise and the periodic cruise are two common flight modes. However, compared with the optimal speed cruise, the periodic cruise can save more fuel. Then, to enhance the flight performance, many researchers have investigated the periodic cruise. The flight trajectory of a hypersonic vehicle with the periodic cruise are separated into two components: rarefied atmosphere and condensed atmosphere. Then, the route planning problem of a hypersonic vehicle with the periodic cruise can be modeled as an OCPSS with some inequality constraints and terminal constraints. To obtain a numerical solution, based on the time-scaling transformation and some auxiliary piecewise-constant functions, the OCPSS is transformed into a POP. Solutions obtained by using the gradient-based algorithms are usually locally optimal solutions instead of globally optimal solution. In addition, the amount of calculation and the convergence rate of the gradient-based algorithms are also less encouraged. To avoid the shortcomings of the gradient-based algorithms and the conventional CFF, a penalty function-based improved CFF algorithm is developed for solving the POP. It should be pointed out that the improved CFF is differentiable, only requires a adjusting parameter, and excludes logarithmic terms or exponential terms. More importantly, any one local solution of the improved CFF is a better local solution of the original parameter optimization problem. Thus, the penalty function-based improved CFF algorithm does not require to minimize the cost function. In addition, compared with the gradient-based algorithms, the penalty function-based improved CFF algorithm is a global optimization algorithm, which takes less time and converges faster. Finally, numerical results illustrate the effectiveness of the proposed method.
The main contributions of this article can be summarized as follows:
Hypersonic vehicle optimal flight control is modeled as an OCPSS.
An improved CFF algorithm is developed for solving the OCPSS.
Numerical results show that the proposed method is effective and robust.
The rest of this paper is organized as follows. The hypersonic vehicle optimal flight control problem is presented in Section 2. An equivalent OCPSS is obtained in Section 3. In Section 4, the OCPSS is written as a POP. Then, an improved CFF is developed in Section 5. By numerical simulation, Section 6 illustrates the effectiveness of the proposed method.
Notations: and present the longitudinal coordinates of the hypersonic vehicle; presents the mass of the hypersonic vehicle; presents the thrust of the hypersonic vehicle; is a constant, which presents the effective exhaust velocity; is a constant, which presents the thrust coefficient; presents the gravitational acceleration; presents the elevator deflection angle; presents the throttle opening; and present the air resistance and the lift of the hypersonic vehicle in the rarefied atmosphere, respectively; and present the air resistance and the lift of the hypersonic vehicle in the condensed atmosphere, respectively; and presents the attack angle; OCPSS presents optimal control problem of switched systems; POP presents parameter optimization problem; CFF presents continuous filled function; MP presents maximum principle; DP presents dynamic programing; DA presents deterministic algorithm; and PA presents probabilistic algorithm.
Problem description
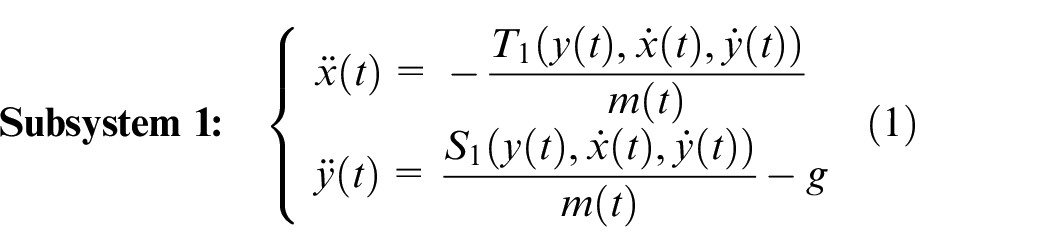
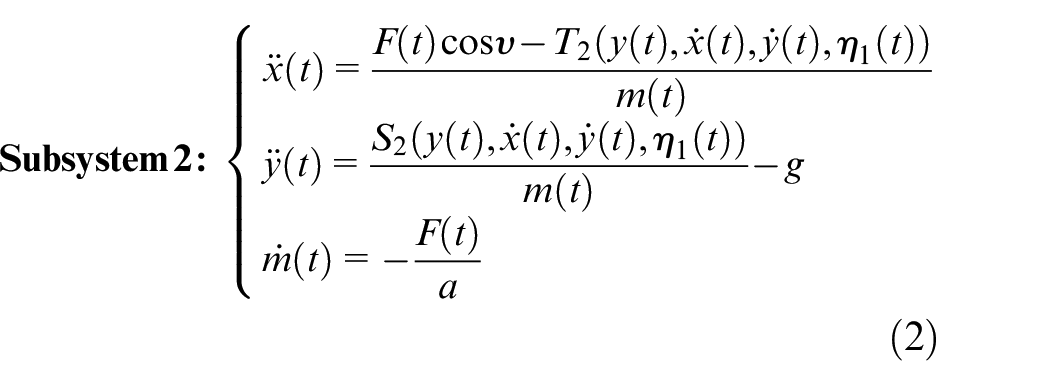
In the route planning problem of a hypersonic vehicle, the optimal speed cruise and the periodic cruise are two common flight modes. However, compared with the optimal speed cruise, the periodic cruise can save more fuel. Thus, to improve the flight performance, many researchers have investigated the periodic cruise. In general, we can divide the flight trajectory of a hypersonic vehicle with the periodic cruise into two components: rarefied atmosphere and condensed atmosphere. Then, the dynamic process of the hypersonic vehicle with the periodic cruise described by Snyman and Fatti,29 Chuang and Morimoto,30 and Hou and Ding36 can be modeled as a switched dynamic system:
where
Subsystems 1 and 2 present the hypersonic vehicle flying in the rarefied atmosphere and the condensed atmosphere, respectively; and present the longitudinal coordinates of the hypersonic vehicle; presents the mass of the hypersonic vehicle; presents the thrust of the hypersonic vehicle; is a constant, which presents the effective exhaust velocity; is a constant, which presents the thrust coefficient; presents the gravitational acceleration; presents the elevator deflection angle; presents the throttle opening satisfying
and present the air resistance and the lift of the hypersonic vehicle in the rarefied atmosphere, respectively; and present the air resistance and the lift of the hypersonic vehicle in the condensed atmosphere, respectively; and presents the attack angle.
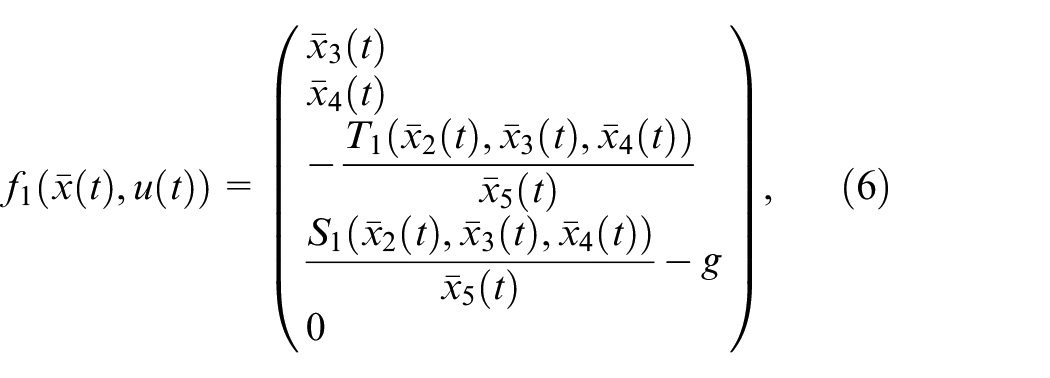
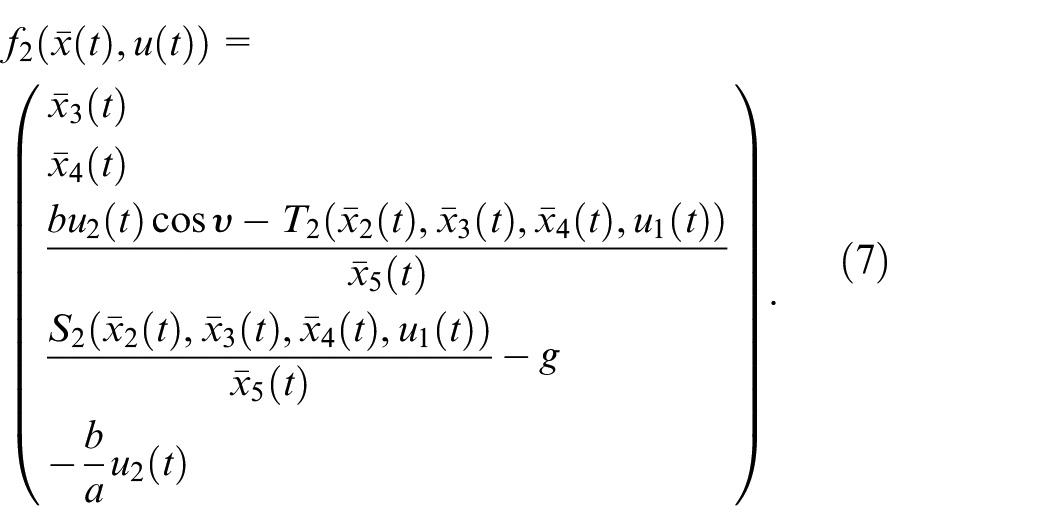
Let , , , , , , and . Following that, with and , (1) and (2) becomes a switched system:
where
Note that the elevator deflection angle satisfies due to being limited by mechanical structure, and the engine thrust depends on throttle opening , where . Thus, the control input satisfies the following continuous–time inequality constraints:
The main purpose of this paper is to maximize the flying distance of the hypersonic vehicle with fixed fuel by choosing the ignition time, the elevator deflection angle, and the throttle opening. Suppose that the initial condition is given by
the terminal constraint is given by
and the ignition time satisfies
Here, denotes the initial time; denotes the terminal time; and denotes the terminal state.
Define a switching sequence as follows:
Here, denotes the number of subsystem switches; for ; and implies that for , the dynamics changes from subsystem to at time . Let denote the class of all switching sequence corresponding to , where and
Thus, the set is depend on the ignition time , , the number of subsystem switches, and , . For a given , any continuous function is referred to as an admissible control (AC). Let denote the class of all AC.
The problem of choosing the switching sequence, the elevator deflection angle, and the throttle opening may be given as the following OCPSS.
Problem 1. For the system (5) with the initial condition (10), find a pair such that
is maximized subject to the constraints (8), (9), and (11), where is a given terminal time and is a free terminal state.
Problem approximation and transformation
In this section, a simpler approximate problem corresponding to Problem 1 will be derived by restricting the control input to suitable piecewise constant functions and introducing some auxiliary piecewise-constant functions.
Problem approximation
In this subsection, the following function is adopted to approximate :
where , ; is a pre-given constant; and the function is given by
Define
Suppose that is the set of all . By substituting the function (13) into the switched system (5), the constraints (8) and (9), and the cost function (12), we can define an approximate problem as follows:
Problem 2. Given the switched system:
with (10), find a pair such that
is minimized subject to the constraints
and the constraint (11), where
Problem transformation
In this subsection, some auxiliary piecewise-constant functions , , , are introduced for each subsystem, and these auxiliary functions satisfy the following continuous-time inequality constraints:
which ensure that for any , there is one and only one pair such that and for all , where and . Let , where , . Then, Problem 2 is written as:
Problem 3. Given the switched system
with (10), choose a pair such that
is minimized subject to the constraints (11), (17), (18), and (21)–(23).
Parameter optimization problem
In this section, the time-scaling transformation is used to obtain a more easily handled problem.
Time–scaling transformation
Let . Then, a time-scaling transformation is given by
where is the duration time of the switching, is a new time variable, and
Let . Suppose that is the set consisting of all such . For any , , from the ordinary differential equation described by (26) and (27), it follows that
By using (29), we have
Parameter optimization problem
Suppose that is the value of on , where and . Define , , and suppose that is the set consisting of all . Then, by applying (4.1) and (4.2) to the switched system (24) with (10), the constraints (17), (18), (21)–(23), (11), and the cost function (25), we obtain
where , , , , , ; ;
and
Let be set containing all . Problem 3 becomes an equivalent parameter optimization problem as follows.
Problem 4. Given the switched system (32) with (10), find a triple such that the cost function (40) is minimized subject to the constraints (31), (34), (35), (36)–(38), and (39).
A penalty function-based improved CFF algorithm
In this section, a penalty function-based improved CFF algorithm is developed for solving the parameter optimization problem described by Section 4.
A penalty optimization problem
Since the inequality constraints (36)–(38) define a non-connected feasible region for , , , it is challenging to find a solution of Problem 4. To avoid this challenging, we can define a penalty optimization problem by using the idea in33–35:
Problem 5. Given the switched system (32) with (10), find a tetrad such that
is minimized, where and denote a penalty parameter variable and a new decision variable, respectively; and are given positive real numbers satisfying ; denotes the set containing all such ; is the constraint’s violation; and is defined by
Remark 1. Note that the positive real number is given. Then, during the minimizing process of , if is increased, should be reduced, which indicates that the decision variable should be reduced. Thus, will be increased and will be reduced, which indicates that any solution of Problem 5 satisfies Problem 4, as .
Gradient formulas
Firstly, the cost function (43) can be written as follows:
where
Then, we can define the Hamiltonian function by
where
and the costate satisfies
with
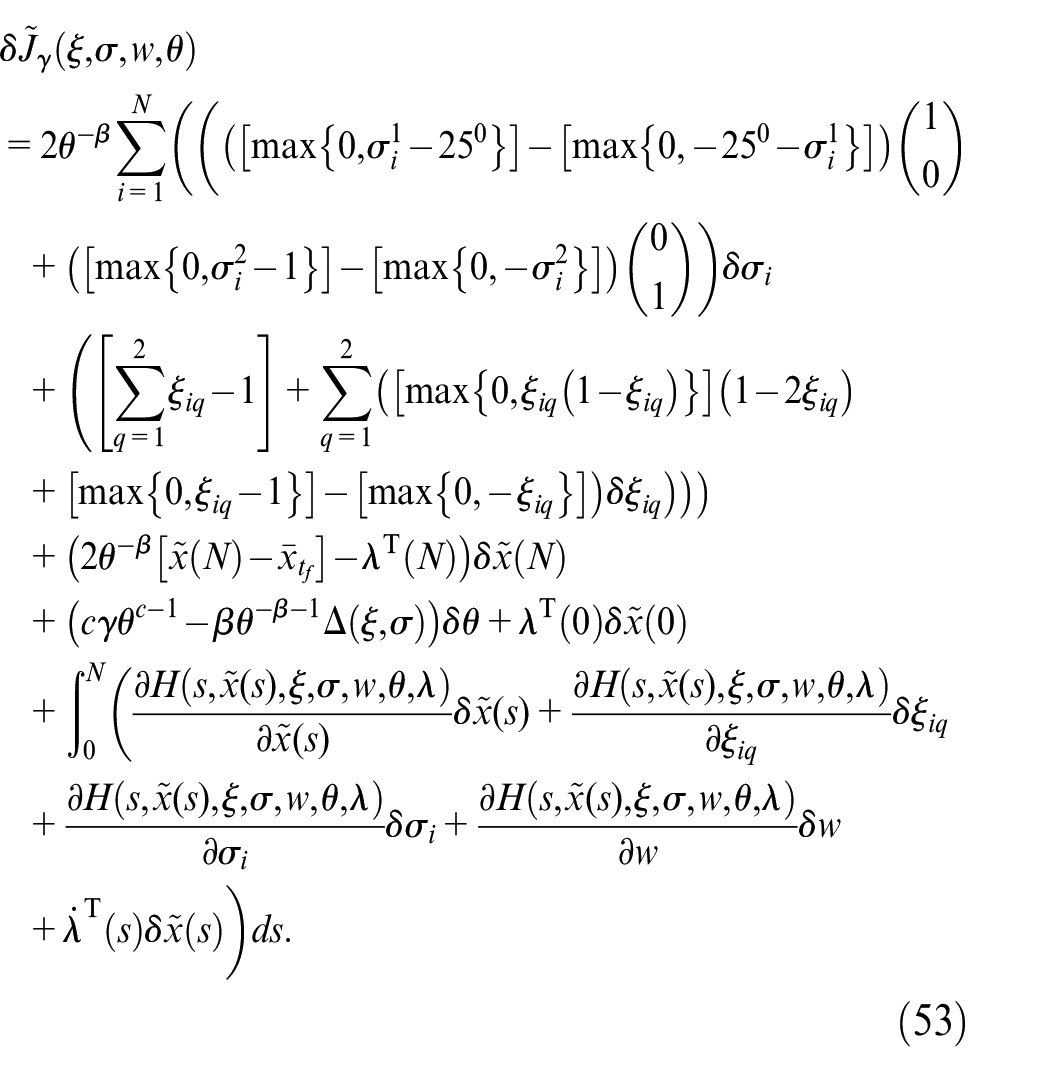
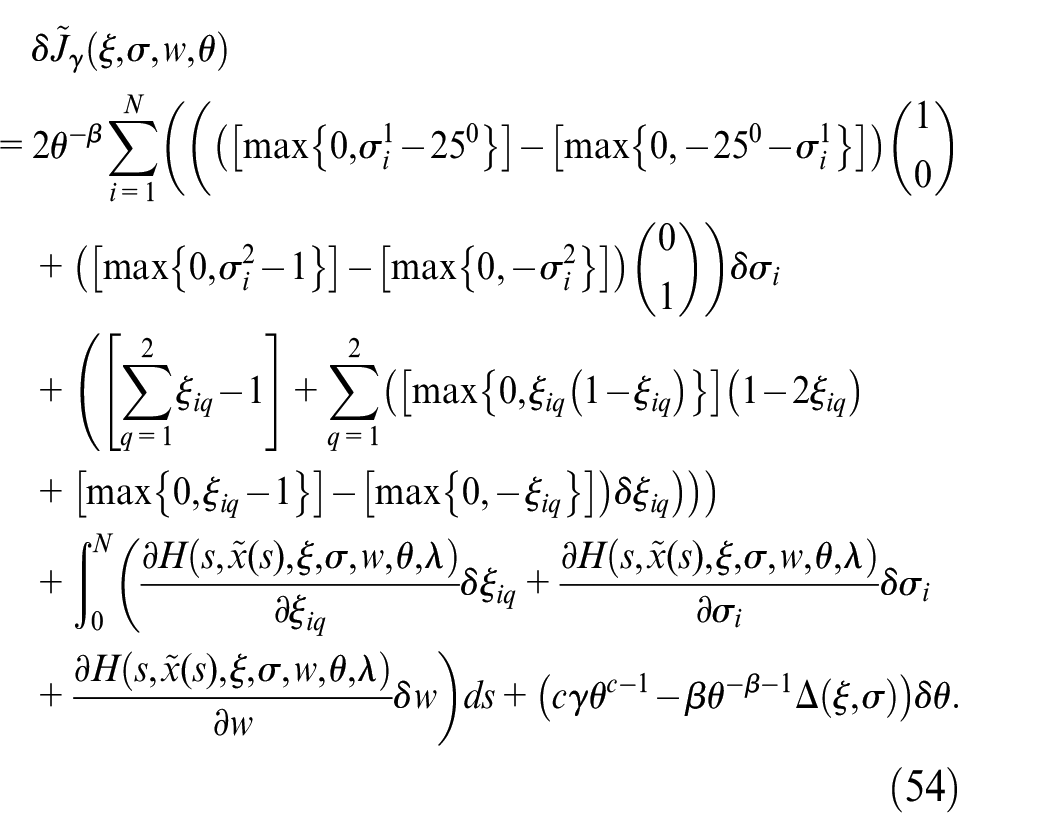
Theorem 1. For and , the gradient of the function (44) with the variables , , , and are expressed by
Proof. Applying (32) and (45) to (44) yields
Then, the first order variation of (52) is presented as follows:
Applying (46) and (47) to (53) gives
Thus, the gradient formulas (48)–(51) of (44) can be obtained by using (54). ■
An improved continuous filled function
In order to avoid the shortcomings of the existing CFF, an improved CFF with an adjusting parameter is develop in this subsection. The improved CFF is differentiable and excludes exponential terms or logarithmic terms. More importantly, any one local solution of the improved CFF is a better local solution of the original parameter optimization problem.
Let . Suppose that is the set consisting of all such . Following that, an improved CFF is defined as follows:
Definition 1. It is assumed that denotes a local minimizer of . Then, is called a CFF of at the local minimizer , if own three properties:
(1) is also a strict local maximizer of the function ;
(2) For any , , where ∇ denotes the gradient operator and is a set defined by
(3) If is not a global minimizer of , then a local minimizer of can be obtained on the set , where
Now, at the local minimizer , an improved CFF can be constructed for solving Problem 5 as follows:
where the functions and are, respectively, defined by
, , and are positive real numbers.
Then, the following theorem will show that the function (55) is a CFF satisfying the properties of Definition 1.
Theorem 2. Let be a local minimizer of and the function be defined by (55). Then, for any , is a strict local maximizer of on .
Proof. Note that is a local minimizer of . Then, for any , there is a such that , where is a neighborhood of defined by
Thus, for any and , we obtain
which shows that for any , is a strict local maximizer of on . ■
Theorem 3. Suppose that is a local minimizer of . Then, for any and the positive real number , we have .
Proof. Note that . Then, by using the function described by (55), we obtain ,
and
for any and the positive real number . ■
To illustrate the function satisfying the rd property of Definition 1, it is assumed that satisfies the following two assumptions.
Assumption 1. Suppose that has only a finite number of minimizers in and the set consisting of the minimizers is defined by
Here, denotes the number of minimizer of .
Assumption 2. Suppose that all of the local minimizers of fall into the interior of , and any point on the boundary of satisfies , where
Theorem 4. Let be a local minimizer but not a global minimizer of on , which implies that the set is not empty. Then, there is a such that is a local minimizer of the function , as , where is given by
Proof. Note that is a local minimizer but not a global minimizer of on . Then, another local minimizer of can be obtained such that
By using definition of described by (56) and the continuity of , as long as , the following inequality can be obtain:
Applying (57) and (58) to the function described by (55) yields
By using Assumption 2, for any , we have
where denotes the boundary of . Then, by applying (60) to the function described by (55), we obtain
Since defined by (55) is continuous, the inequalities (59) and (61) imply that there is a on the line segment between and such that
Thus, we obtain a line segment between and . Suppose that is the set containing all such line segments. Clearly, the set is a closed region. By using continuity of described by (55), there is a point which is a local minimizer of . ■
A penalty function-based improved CFF algorithm
In this subsection, a penalty function-based improved CFF algorithm will be developed for obtaining a global optimal solution to Problem 1 based on Theorems 1–4 and above discussions.
Algorithm 1. A penalty function-based improved CFF algorithm for solving Problem 1.
Step 1: Set , , , , and choose , the tolerance , the upper bound of .
Step 2: By using the steepest descent algorithm with Armijo step size, solve Problem 5 starting from the initial point . If , stop. Let be a local minimizer of Problem 5 and go to Step 3, where denotes the gradient of and ‖·‖ denotes the Euclidean norm.
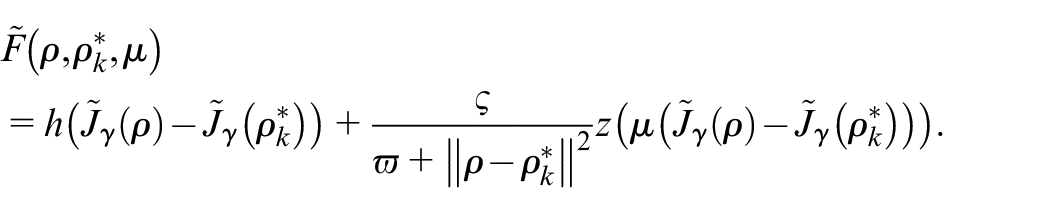
Step 3: Construct a continuous filled function as follows:
Step 4: If , then set , go to step 5, otherwise, go to Step 6, where is the dimension of Problem 5; , , , .
Step 5: By using the steepest descent algorithm with Armijo step size, minimize the continuous filled function by using as an initial point. If the minimization sequences of the continuous filled function go out of the set , set and go to Step 4, otherwise, a minimizer will be obtained by minimizing the CFF , set , , and go to Step 3.
Step 6: If , then set and go to Step 3, otherwise, this algorithm stops and let be a global minimizer of Problem 5, and go to Step 7.
Step 7: The solution of Problem 1 is constructed by using the global minimizer of Problem 5.
Remark 2. In Step 4, the value of the parameter requires o be chosen precisely. In Algorithm 1, is chosen to ensure is greater than a certain threshold, e.g. ). Step 5 indicates that the local minimizer of the CFF satisfies . Thus, is a better local minimizer of Problem 5. Assumption 2 is necessary for discussing the properties of the CFF . However, the assumption is not necessary in the process of implementing Algorithm 1. Thus, although Assumption 2 is quite strong and difficult to verify in general, this assumption does not affect the application of Algorithm 1.
Remark 3. Step 5 implies that is a CFF at a local minimizer of Problem 5 with the set , which indicates that is not a global minimizer of Problem 5. Following that, in Step 3, a point satisfying can be found in the course of minimizing by using property (3) in definition 1, which implies that the point is a better local minimizer of Problem 5. The round-robin of Algorithm 1 is continued until no better minimizer of Problem 5 can be obtained to decrease . Thus, the minimizer obtained by using Algorithm 1 is a global minimizer of Problem 5.
In many cases, one is not only interested in the optimal solution but also to know how the dynamic process described by (1) and (2) for the hypersonic vehicle depends on data. In addition, one needs to determine how specific variations in data will influence the optimal value of the cost function and the optimal solution previously obtained. Solutions to the above problems constitute what is called sensitivity analysis. For the sake of simplicity, we just analyze the effect of a small perturbation in the elevator deflection angle and the throttle opening constraint conditions described by (8) and (9) on the cost function. The uncertainty analysis of other parameters will be carried out in future work. Suppose that the constraints (8) and (9) are subject to a small perturbation. Then, (8) and (9) can be described by the following continuous-time inequality constraints:
where , ; and present the effect of external interference on the constrained conditions of the dynamic process described by (1) and (2) for the hypersonic vehicle. Then, the change in the cost function described by (12) of a small disturbance in the constraints (8) and (9) can be obtained by using the sensitivity analysis approach developed by the recent work.31
Numerical results
In this section, a hypersonic vehicle optimal flight control problem is used to illustrate that Algorithm 1 is effective. In this numerical experiment, the elastic deformation of the hypersonic vehicle is not considered, which implies that the hypersonic vehicle is rigid. In addition, it is assumed that the combination engine is installed accurately in x axis of the coordinate system, which indicates that the thrust deviation is ignored. The model parameters are presented as follows:
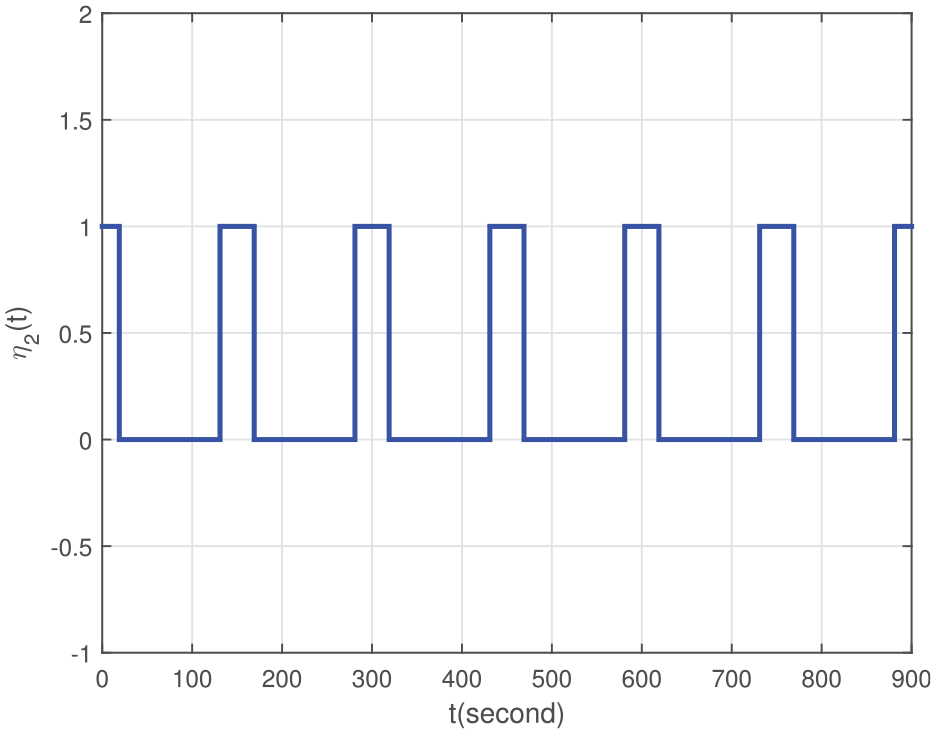
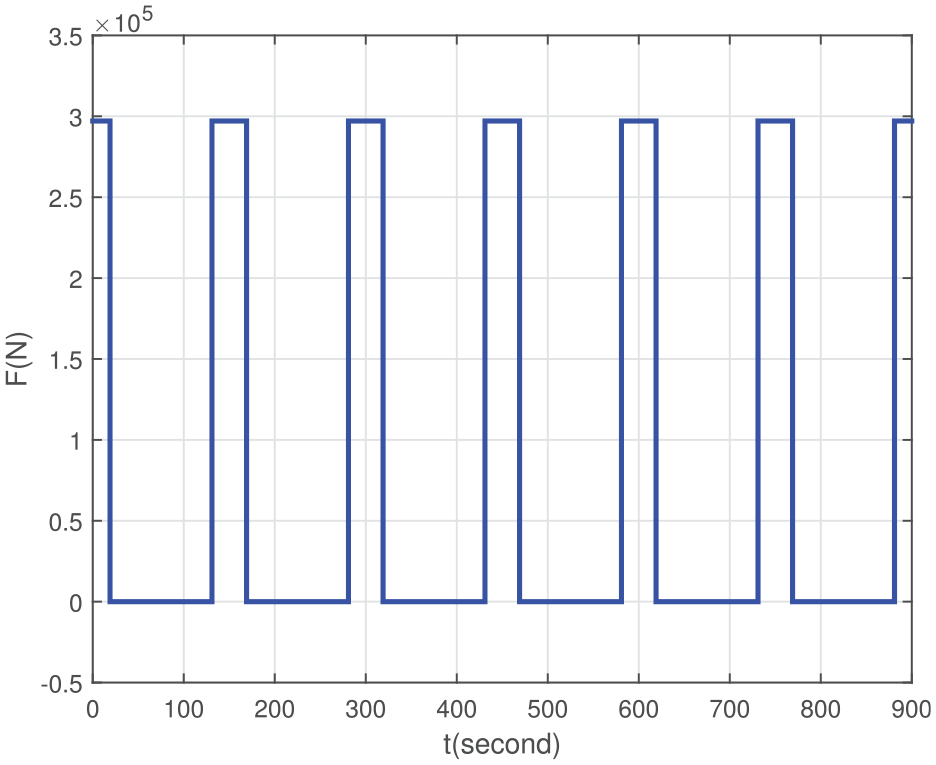
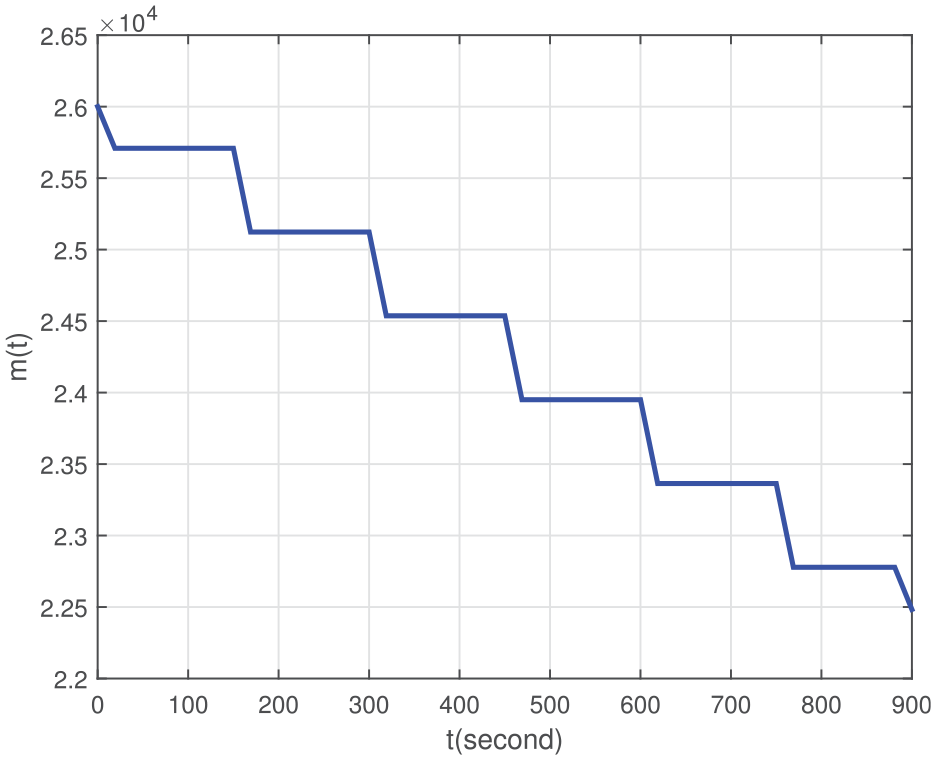
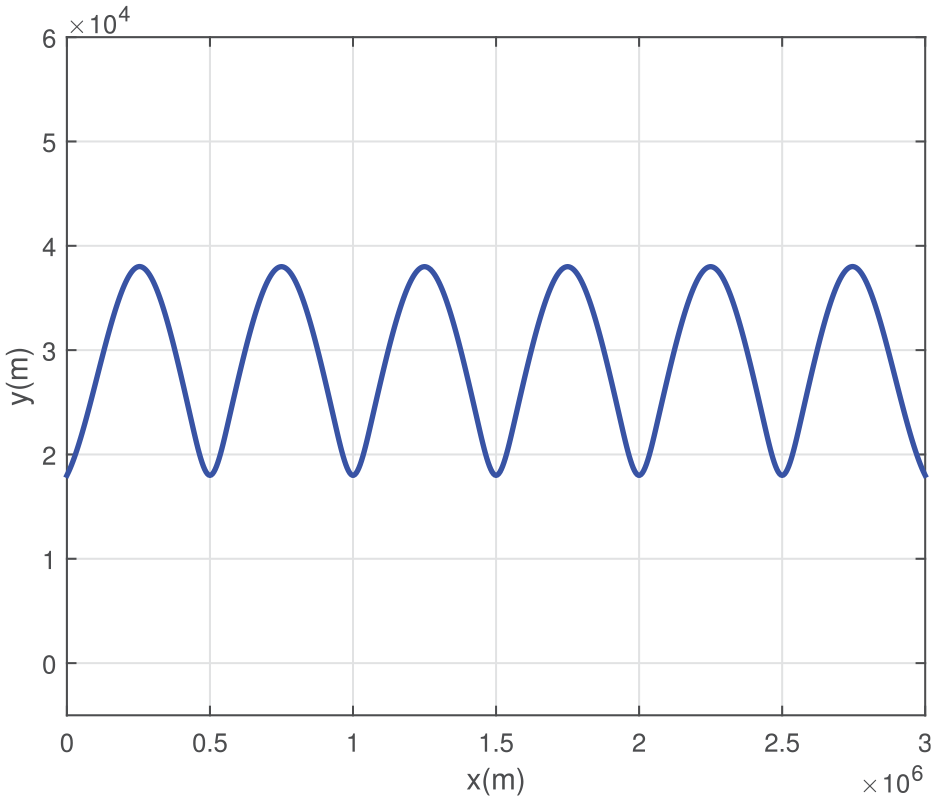
Following that, we solve the hypersonic vehicle optimal flight control problem by using Algorithm 1. The optimal value obtained is . The value of the elevator deflection angle , the throttle opening , and the mass of the hypersonic vehicle at the terminal time are , , , respectively; The optimal elevator deflection angle and the optimal throttle opening are shown in Figures 1 and 2, respectively. The optimal trajectory of the engine thrust , the optimal trajectory of the mass change for the hypersonic vehicle , and the optimal flight path are shown in Figures 3 to 5, respectively.
The optimal elevator deflection angle: .
The optimal throttle opening: .
The optimal trajectory of the engine thrust: .
The optimal trajectory of the mass change for the hypersonic vehicle: .
The optimal flight path: .
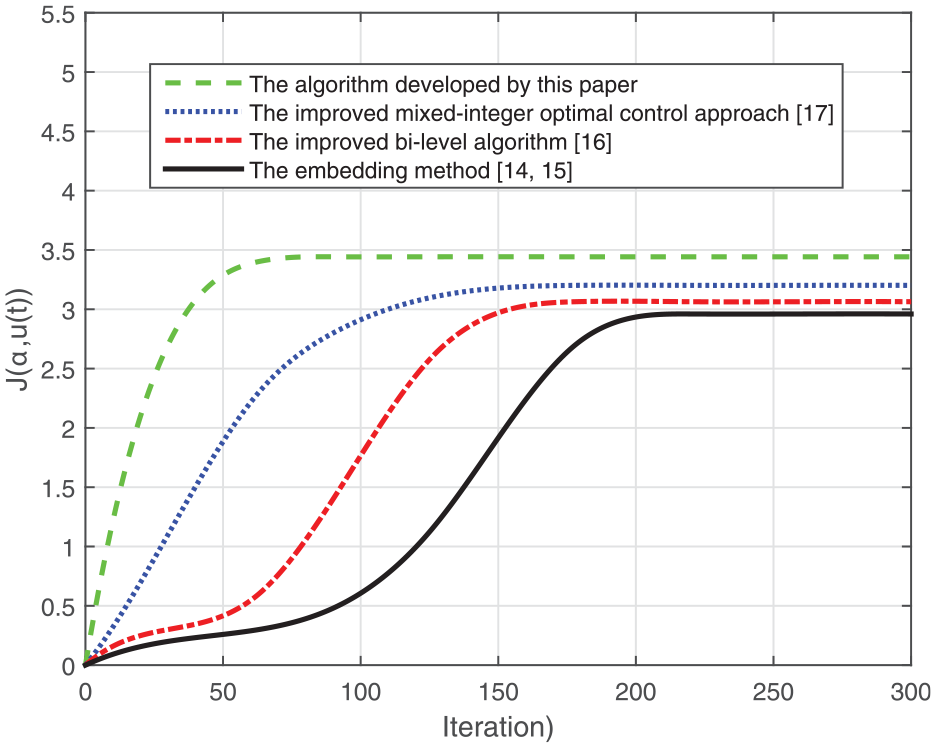
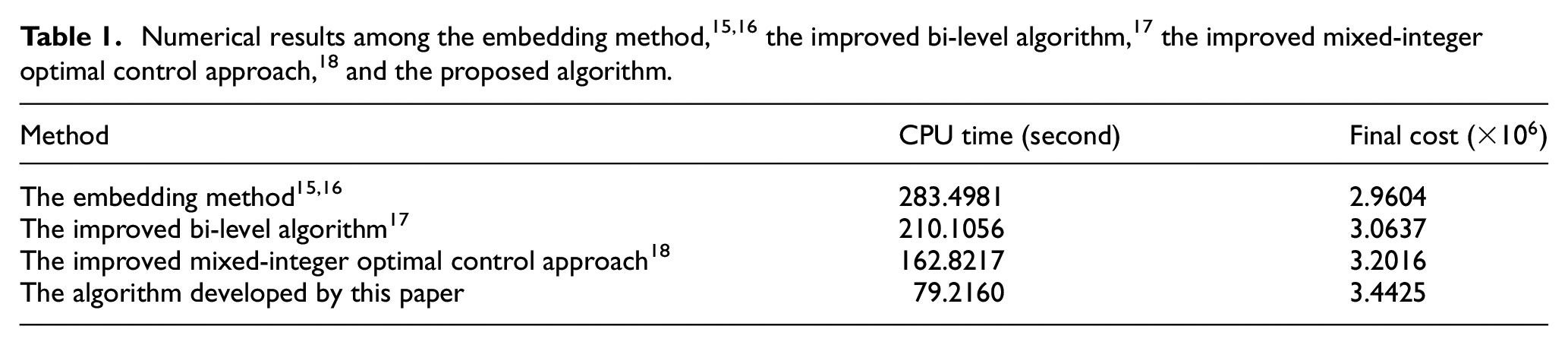
To compare with the existing approaches, the embedding approach,15,16 the improved bi-level method,17 and the improved mixed-integer optimal control approach18 are used to show the solution of the above optimal problem with the same parameter. Numerical results are given by Figure 6 and Table 1. Figure 6 indicates that Algorithm 1 takes only 63 iterations to obtain a satisfactory value 3.4425, while the methods presented by Vasudevan et al.,15 Mei et al.,16 and Wu et al.17,18 take 221 iterations, 187 iterations, and 152 iterations to obtain the satisfactory values 2.9604, 3.0637, and 3.2016, respectively. In other words, the iterations of Algorithm 1 are reduced by 71.5%, 56.1%, and 40.3%, respectively. Furthermore, compared with the methods presented by Vasudevan et al.,15 Mei et al.,16 and Wu et al.,17,18Table 1. also implies that Algorithm 1 can save 72.1%, 46.2%, and 29.5% computation time, respectively.
Simulation of the embedding method,15,16 the improved bi-level algorithm,17 the improved mixed-integer optimal control approach,18 and the proposed algorithm.
Numerical results among the embedding method,15,16 the improved bi-level algorithm,17 the improved mixed-integer optimal control approach,18 and the proposed algorithm.
The improved mixed-integer optimal control approach18
162.8217
3.2016
The algorithm developed by this paper
79.2160
3.4425
Theorems 4.1–4.2 provided by Goh and Teo32 indicate that Problems 1 and 2 are equivalent as . Unfortunately, it is impossible to take a very large value of because of the limitation of computer accuracy. Following that, to demonstrate the effect of on the performance of the algorithm proposed by this paper, a sensitivity analysis for is performed and the numerical simulation results are presented by Table 2, which shows that the CPU time is also increasing as becomes larger. To balance the calculating cost and the accuracy of solutions, we set to . That is to say, a satisfactory solution can be achieved by using a finite value instead of a very large value of .
Processing capability analysis with the tolerance .
Values for the parameter
5
15
50
150
450
1350
Objective function value J
CPU time (second)
36.4533
49.0719
79.2160
424.8221
649.8516
3676.1832
For sensitivity analysis, let , and the other parameters remain the same. Following that, we can obtain the effect of in the constraints (62) and (63) on the cost function (12) by using the sensitivity analysis approach presented by the work.31 The result is , which is only 0.0126% of the optimal value . This indicates that the cost function (12) is robust to the small disturbance in the constraints (62) and (63).
The above results indicate that the proposed algorithm is less time–consuming with faster convergence rate, and is better than the methods presented by the works.15–18 That is, an alternative algorithm is proposed for the hypersonic vehicle optimal flight control problem. Furthermore, the results of sensitivity analysis imply that the cost function is robust to the small perturbation in the continuous-time inequality constraints.
Conclusion
A hypersonic vehicle optimal flight control problem is investigated in this paper. The hypersonic vehicle optimal flight control problem is modeled as a constrained OCPSS. Then, to achieve the globally optimal solution of the he hypersonic vehicle optimal flight control problem, we propose a penalty function-based improved CFF algorithm. Numerical results show that the proposed algorithm is effective and the cost function is robust to the small perturbation in the continuous-time inequality constraints.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Shihong Ding
References
1.
DavisMCWhiteJT. X-43A flight-test-determined aerodynamic force and moment characteristics at Mach 7.0. J Spacecr Rockets2008; 45: 472–484.
2.
XuHMirmiraniMDIoannouPA. Adaptive sliding mode control design for a hypersonic flight vehicle. J Guid Control Dyn2004; 27: 829–838.
3.
YeLZongQCrassidisJL, et al. Output-redefinition-based dynamic inversion control for a nonminimum phase hypersonic vehicle. IEEE Trans Ind Electron2018; 65: 3447–3457.
4.
DingSMeiKYuX. Adaptive second-order sliding mode control: a Lyapunov approach. IEEE Trans Automat Contr2022; 67: 5392–5399.
5.
HouQDingS. Finite-time extended state observerbased super-twisting sliding mode controller for PMSM drives with inertia identification. IEEE Trans Transp Electrification2022; 8: 1918–1929.
6.
DuanHLiS. Artificial bee colony–based direct collocation for reentry trajectory optimization of hypersonic vehicle. IEEE Trans Aerosp Electron Syst2015; 51: 615–626.
7.
Naresh KumarGIkramMSarkarAK, et al. Hypersonic flight vehicle trajectory optimization using pattern search algorithm. Optim Eng2018; 19: 125–161.
8.
DingSZhangBMeiK, et al. Adaptive fuzzy SOSM controller design with output constraints. IEEE Trans Fuzzy Syst2022; 30: 2300–2311.
9.
WuXLinJZhangK, et al. A switched dynamical system approach towards the optimal control of chemical processes based on a gradient-based parallel optimization algorithm. Comput Chem Eng2018; 118: 180–194.
10.
WuXZhangKChengM. Computational method for optimal machine scheduling problem with maintenance and production. Int J Prod Res2017; 55: 1791–1814.
11.
WuXLinJZhangK, et al. Numerical algorithm for optimal control of switched systems and its application in cancer chemotherapy. Appl Soft Comput2022; 115: 108090.
12.
SunTSunXWangX, et al. A novel multidimensional penalty-free approach for constrained optimal control of switched control systems. Int J Robust Nonlinear Control2021; 31: 582–608.
13.
LiXDongLXueL, et al. Hybrid reinforcement learning for optimal control of non-linear switching system. IEEE Trans Neural Netw Learn Syst. 2022. DOI: 10.1109/TNNLS.2022.3156287.
14.
WuXZhangKSunC. Constrained optimal control of switched systems based on modified BFGS algorithm and filled function method. Int J Comput Math2014; 91: 1713–1729.
15.
VasudevanRGonzalezHBajcsyR, et al. Consistent approximations for the optimal control of constrained switched systems–-part 1: a conceptual algorithm. SIAM J Control Optim2013; 51: 4463–4483.
16.
MeiKDingSYuX. A generalized super-twisting algorithm. IEEE Trans Cybern. Epub ahead of print 1August2022. DOI: 10.1109/TCYB.2022.3188877.
17.
WuXZhangKChengM. Computational method for optimal control of switched systems with input and state constraints. Nonlinear Anal: Hybri Sys2017; 26: 1–18.
18.
WuXZhangKChengM. Optimal control of constrained switched systems and application to electrical vehicle energy management. Nonlinear Anal: Hybri Sys2018; 30: 171–188.
19.
SnymanJAFattiLP. A multi-start global minimization algorithm with dynamic search trajectories. J Optim Theory Appl1987; 54: 121–141.
20.
WuXHouYZhangK. Switched system optimal control approach for drug administration in cancer chemotherapy. Biomed Signal Process Control2022; 75: 103575.
21.
BassoP. Iterative methods for the localization of the global maximum. SIAM J Numer Anal1982; 19: 781–792.
22.
WangKLiXGaoL, et al. A genetic simulated annealing algorithm for parallel partial disassembly line balancing problem. Appl Soft Comput2021; 107: 107404.
23.
KatochSChauhanSSKumarV. A review on genetic algorithm: past, present, and future. Multimed Tools Appl2021; 80: 8091–8126.
24.
WuXZhangK. A limited-memory BFGS-based differential evolution algorithm for optimal control of nonlinear systems with mixed control variables and probability constraints. Numer Algorithm. Epub ahead of print 17October2022. DOI: 10.1007/s11075-022-01425-5.
25.
HousseinEHGadAGHussainK, et al. Major advances in particle swarm optimization: theory, analysis, and application. Swarm Evol Comput2021; 63: 100868.
26.
LinHWangYGaoY, et al. A filled function method for global optimization with inequality constraints. Comput Appl Math2018; 37: 1524–1536.
27.
RenpuG. A filled function method for finding a global minimizer of a function of several variables. Math Program1990; 46: 191–204.
28.
GeR. The theory of filled function-method for finding global minimizers of nonlinearly constrained minimization problems. J Comput Math1987; 5: 1–9.
29.
ChuangCHMorimotoH. Periodic optimal cruise for a hypersonic vehicle with constraints. J Spacecr Rockets1997; 34: 165–171.
WuXZhangKChengM. Sensitivity analysis for an optimal control problem of chemical processes based on a smoothing cost penalty function approach. Chem Eng Res Des2019; 146: 221–238.
32.
GohCJTeoKL. Control parametrization: a unified approach to optimal control problems with general constraints. Automatica1988; 24: 3–18.
33.
WuXZhangKSunC. Parameter tuning of multi-proportional-integral-derivative controllers based on optimal switching algorithms. J Optim Theory Appl2013; 159: 454–472.
34.
MeiKDingSChenC-C. Fixed-time stabilization for a class of output-constrained nonlinear systems. IEEE Trans Syst Man Cybern Syst2022; 52: 6498–6510.
35.
DingSHouQWangH. Disturbance-observer-based second-order sliding mode controller for speed control of PMSM drives. IEEE Trans Energy Convers. Epub ahead of print 6July2022. DOI: 10.1109/TEC.2022.3188630.
36.
CarterPHPinesDJRuddLV. Approximate performance of periodic hypersonic cruise trajectories for global reach. J Aircr1998; 35: 857–867.