
Abstract
In this paper, a dynamic super twisting sliding mode controller(ST-SMC) is proposed to resolve the problems associated with sudden load changes in AC-DC inverter system such that a high-quality output can be obtained. By developing a non-linear extended state observer (NLESO), both system states and lumped parameter disturbances are estimated and incorporated into controller design. This dynamic disturbance estimation and rejection algorithm not only increases the control loop reliability by eliminating the current sensor dependency, but it also allows the ST-SMC to be implemented with a small switching gain that minimizes the chattering effect. Optimal observer gain parameters design has been achieved by adopting the particle swarm optimization approach. The stability of the entire closed-loop system is proven based on the Lyapunov stability criterion. The effectiveness of the proposed dynamic ST-SMC algorithm has been validated in MATLAB Simulink environment where, the control strategy exhibit rapid dynamic response with a steady-state error of
Keywords
Introduction
Voltage source inverter (VSI) is widely employed in power generation systems,1–3 uninterruptible power supplies,1,4 electric vehicles systems (EVS), 5 and renewable energy systems,6,7 in order to supply power to the variety of loads. In these applications, accurate regulation of the inverter output voltage and current are of significant importance. Some of the important factors that degrade the inverter output performance in these applications include inverter non-linear dynamics, sudden load changes, measurements errors, actuator degradation, electromagnetic interference, etc.1–7 These disturbances cripple the inverter’s output voltage and degrade the control performance, which results in high harmonic content and steady-state error in the output8,9 that may cause damage to the application systems. Therefore, it is important to design an inverter control scheme that will be robust enough to withstand the disturbances resulting from load fluctuations such that the steady-state error performance can be improved, thereby minimizing the total harmonic distortion.
Up to present, many control approaches have been presented in the literature to handle these disturbances which includes, repetitive control,
10
To mitigate the adverse effects of discontinuous control law, many elegant methods have been presented in the literature. A hysteresis-SMC approach has been presented in Kukrer et al. 17 where a continuous saturation function replaces the discontinuous signum function. However, in this method, there is a trade-off between chattering removal and robustness where large boundary thickness will reduce the chattering but the robustness toward the load variation is decreased. 18 The second approach used for chattering alleviation is gain adaptation. In conventional SMC the switching gain in the controller is required to be larger than the bounds of disturbances in the system to fulfill the existence condition that result in chattering. 15 In adaptive approach the gain over estimation is avoided by appropriately adapting the switching gain proportional to the uncertainties in the system. Adaptive SMC approaches has been presented in Rezkallah et al. 6 and Ghanbarian et al. 19 to improve the steady state performance and THD mitigation in the inverter system. The third approach that is being reported in the literature is to use higher order sliding mode control (HOSMC). The performance of the traditional SMC is restricted by the condition that the system relative degree must be 1 and the inclusion of the switching function in the first derivative of sliding surface. To remove this restriction HOSMC has been proposed in which switching function is included in the higher order derivatives of sliding variables. 20 HOSMC has been implemented on the inverter system in Del Pizzo et al. 21 and Dai et al. 22 to get a continuous control signal by overcoming chattering phenomenon. Although HOSMC approach gives reasonable tracking performance but all of above approaches are designed through state feedback that needs complete information of the system parameters and system states. In addition, the conventional state feedback control laws also lack the ability to deliver superior control performance in the event of the failure of the current sensor to give proper feedback.
Researchers have presented several closed-loop algorithms which do not require any information other than the output of the system. These algorithms are not only straightforward to implement but also utilize fewer sensors. Output feedback SMC schemes have been investigated such as Chang et al. 23 and Zhu et al. 24 but again their gains are designed to be proportional to the uncertainties in the system that causes chattering phenomenon. In Wang et al. 25 output feedback based disturbance and state observer has been proposed to address the harmonic distortion mainly due to the linear load variations. The algorithm can be implemented with relatively low switching gain if the load disturbances are properly estimated however, in order to implement the algorithm comprehensive knowledge of system parameters are required. In Zhao et al. 26 a higher order sliding mode observer based on terminal sliding mode control strategy has been presented. The strategy is model dependent that requires the knowledge of system parameters and additionally the HOSMO performance depends on the bound of the disturbances. In similar scope of study, artificial neural network (ANN) based disturbance rejection SMC is presented in Zhu and Fei 14 where disturbances are estimated using ANN approach are rejected on the sliding surface. It has been noted that disturbances rejection strategies can be implemented by using small controller switching gains and the convergence of states mainly depends upon the convergence of estimation errors. With higher bandwidths of disturbance observers, accuracy of prediction is improved at the expense of amplification of the noise; therefore, the observer gains must be designed appropriately to accomodate these conflicting requirements for optimal system performance. Although output feedback SMC control schemes offers satisfying output, however, the studies in the existing literature concerning dynamic output feedback based continuous higher order SMC for inverter system with mismatched uncertainties are still lacking.
In this paper, a non-linear extended state observer (NLESO) based super twisting control algorithm has been proposed for a single phase inverter with mismatched uncertainties due to a wide range of load variations. The extended state observer estimates the system states along with lumped parameter disturbances. The non-linear terms in ESO contribute toward the convergence of estimation errors while the optimal gain selection has been made using PSO. The estimated states and lumped disturbances are then incorporated in sliding surface and control law. The proposed algorithm can be implemented with small switching gains that effectively reduce the chattering effect without the loss of robustness. The notable merits of this paper are as follows:
The controller is model-independent, and only the output voltage measurement is required to implement the proposed control law.
The NLESO proposed here is finite-time convergent and gives robust estimates of system states and accumulates the effects of load disturbances as a lumped parameter. Through the concept of lumped disturbance rejection, the effectiveness of the control law is enhanced and discontinuous control action is eliminated.
The complexity of observer gain design has been significantly reduced by using PSO technique.
The effectiveness of the proposed algorithm is verified via MATLAB simulations, where the system is subjected to both linear and non-linear load changes.
The rest of the paper is organized as follows: Inverter modeling is given in Section 2. Section 3 deals with the designing of the dynamic ST-SMC control law. Section 4 is devoted to the stability analysis of the proposed algorithm. Observer gain optimization using PSO is described in Section 5 followed by simulation results and discussions in Section 6. Finally, the paper is concluded in Section 7.
Inverter model
A single-phase inverter is shown in Figure 1, where
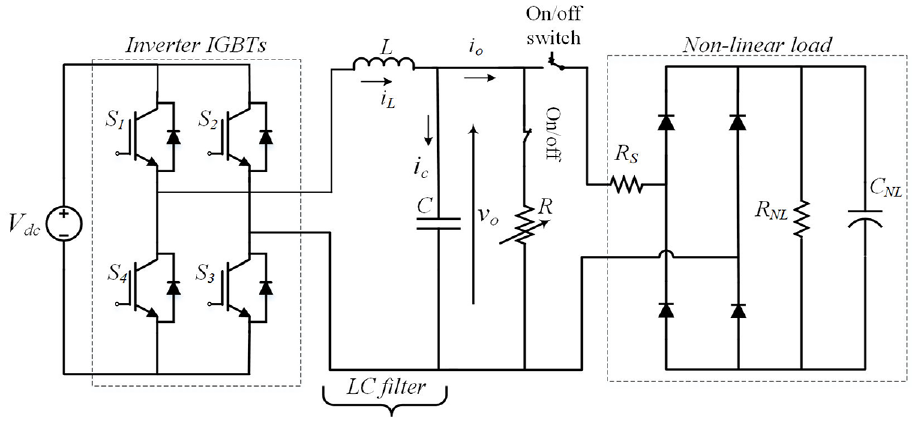
Single phase DC-AC inverter.
Output voltage

For this system, output voltage

where
Controller design
The main control objective is to develop a robust controller for this VSI system that can track the desired reference sinusoidal voltage

By taking derivative of (3) and inserting (2), it becomes

where,

where

where,

where

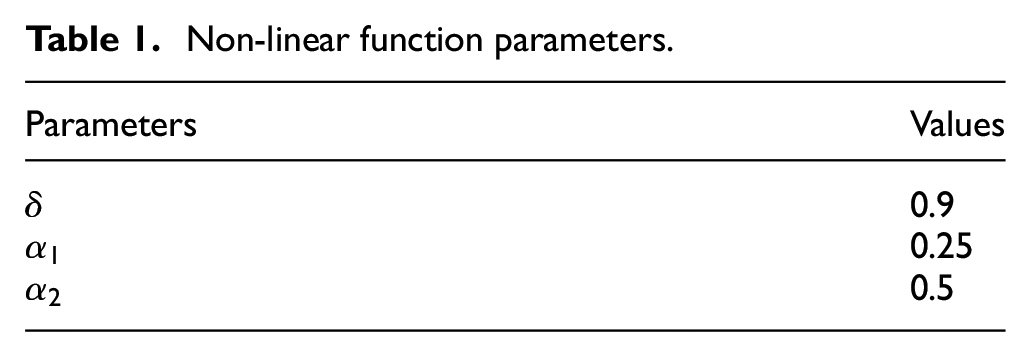
where
Non-linear function parameters.
The control scheme is illustrated in the Figure 2 which illustrates that the output of the observer is fed to the sliding surface that can be designed as

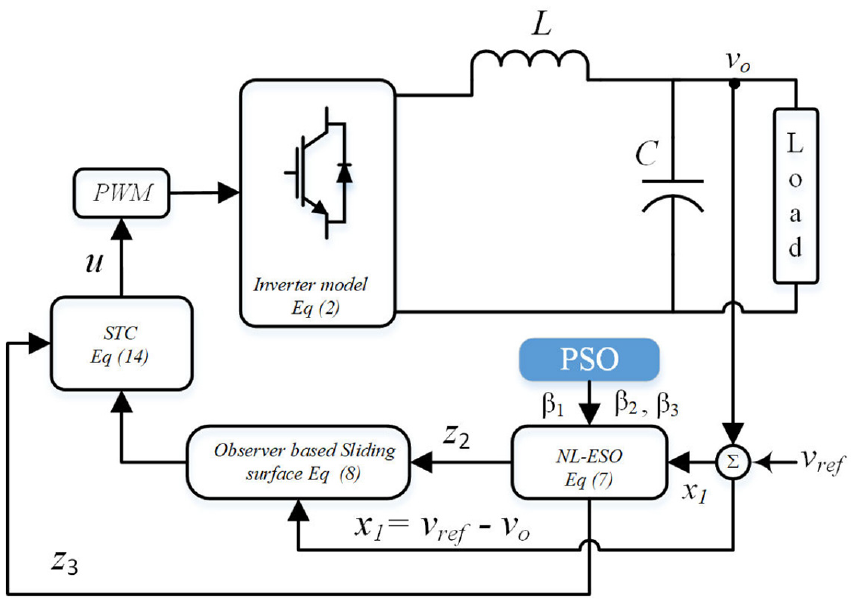
Control strategy.
where

By inserting the value of

By the virtue of (7), equation (10) can be written as

By making

where

By inserting the value of

Traditionally, in order to achieve fast convergence of sliding variable
Stability analysis
This section illustrates the stability analysis of the proposed closed-loop system. Firstly, the observer stability is ensured by proving that the error dynamics converge to 0 and then it is proven that the system dynamics and sliding surface converge to 0 in finite time. For that purpose, the observation errors are defined as

As

From (7) and (15), (16) continues to be

Further simplification of (17) results in

By writing in matrix form we get

where



By substituting the value of






By the virtue of observer convergence,



Equation (32) can be written as

where,

thus, any positive value for

This completes the proof.
State convergence
In order to prove the state convergence following Lyapunov candidate function is selected.

Differentiating the above equation gives





By inserting

By rearranging the terms
It can be written as

this equation can be written in the following form

It is a first order differential equation whose general solution can be written as

where



For finding the constant




Then (54) can be represented as

If
Observer gain tuning
The estimation accuracy of the nonlinear extended state observer is critical to the closed-loop control performance of the system. The greater the convergence rate, the higher the accuracy of the control loop. In this text optimal observer parameters are obtained using particle swarm optimization technique by developing a unique cost function presented in Anjum et al. 28
The procedure of the PSO is presented in Figure 3(a) where the members of the swarm are represented as particles and each particle provide a potential solution to the estimation error-based objective function. At each iteration, the specified objective function is evaluated for each particle and particles are updated with personal best,

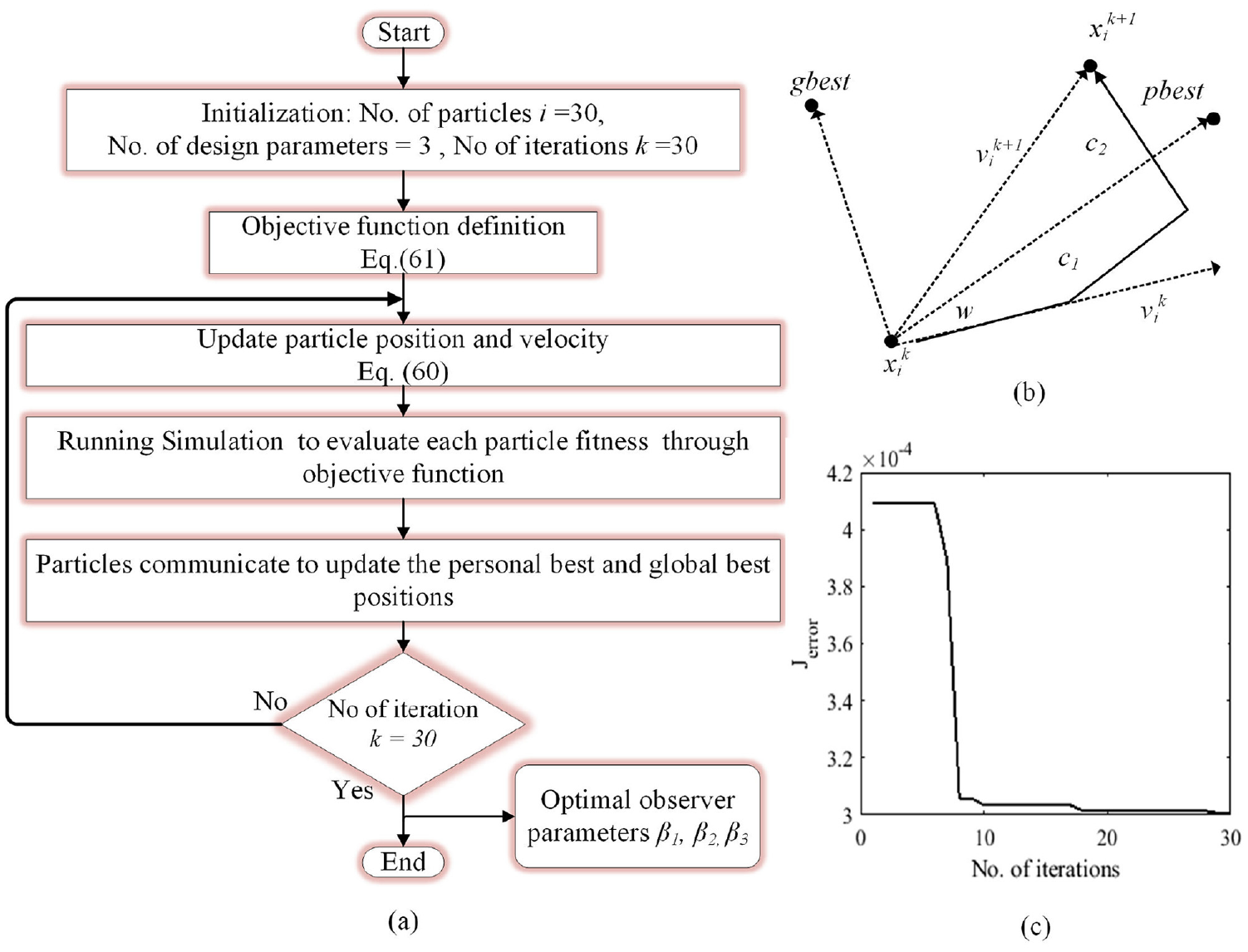
(a) flow chart of PSO algorithm, (b) particles position and velocity update, and (c) PSO convergence.
where

PSO parameters.
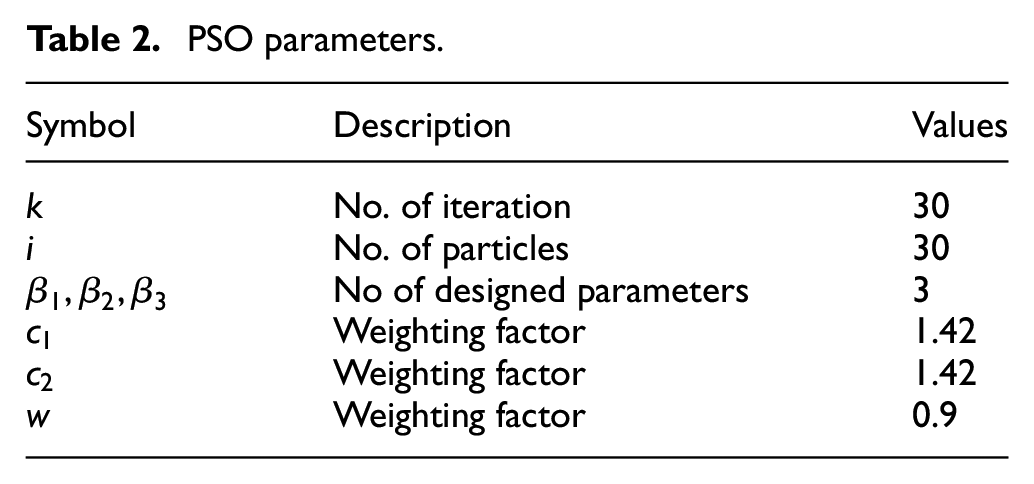
The PSO will minimize the objective function by selecting the optimal observer parameters
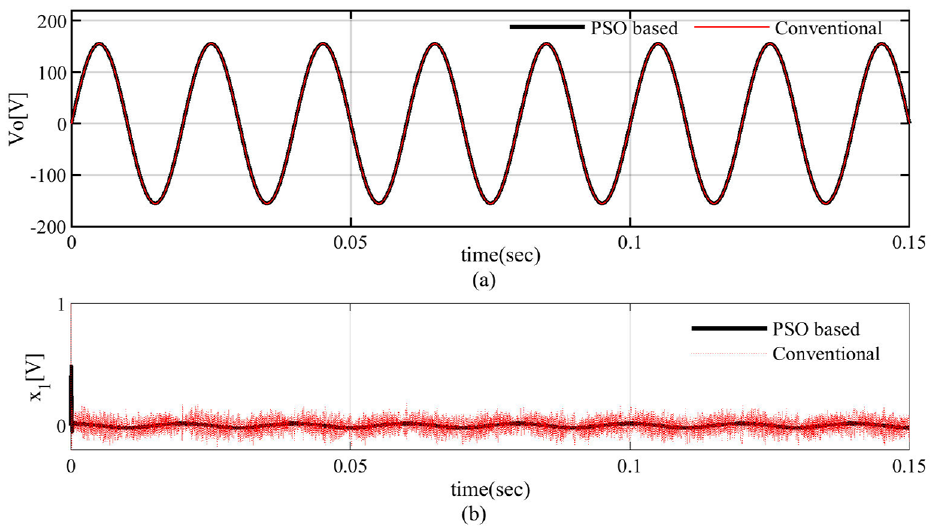
(a) Output voltage and (b) tracking error.
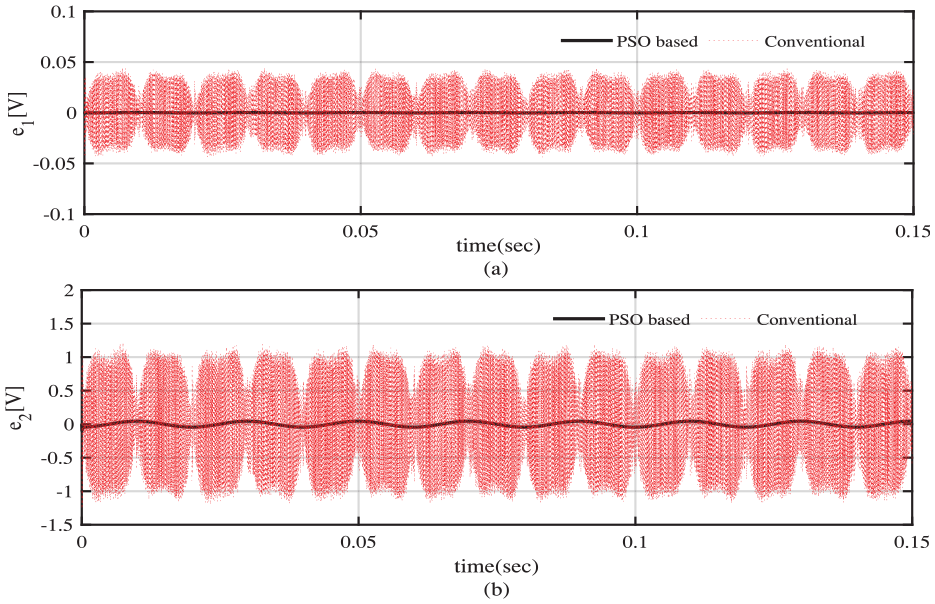
(a) First state estimation error and (b) second state estimation error.
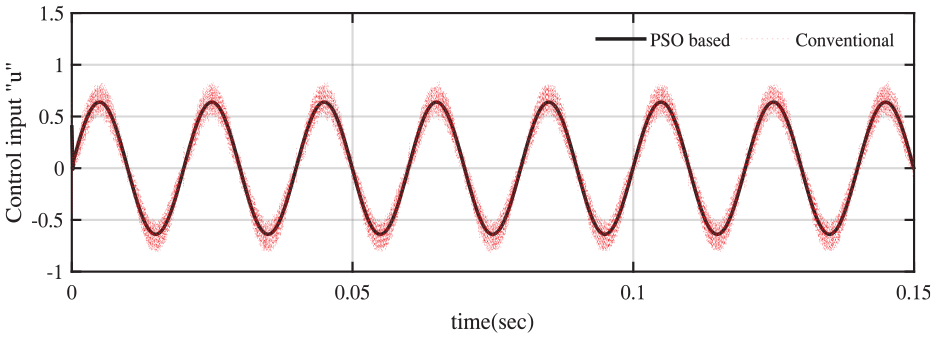
Control input u.
Simulation results for reference tracking
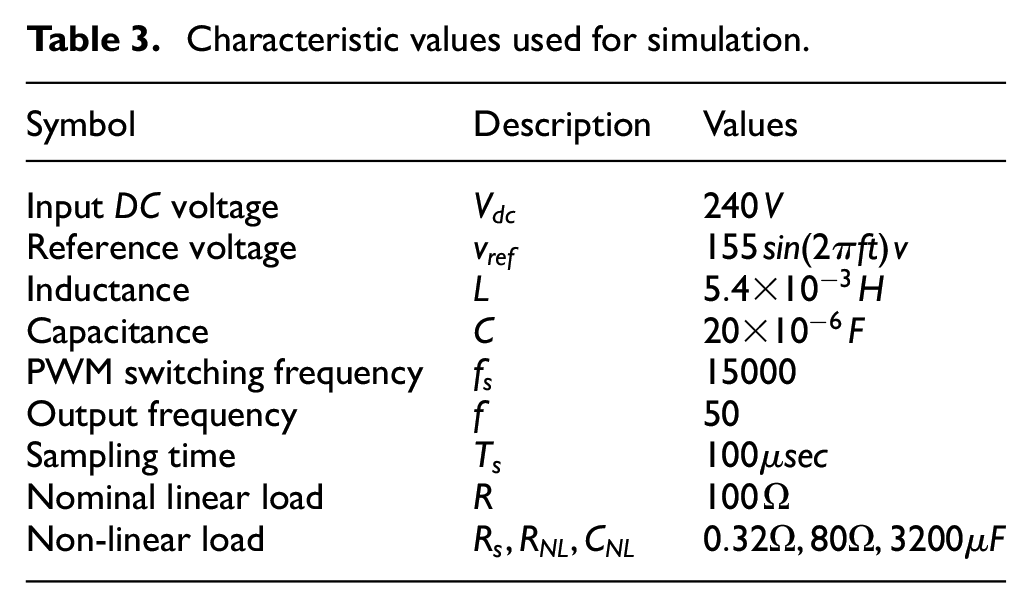
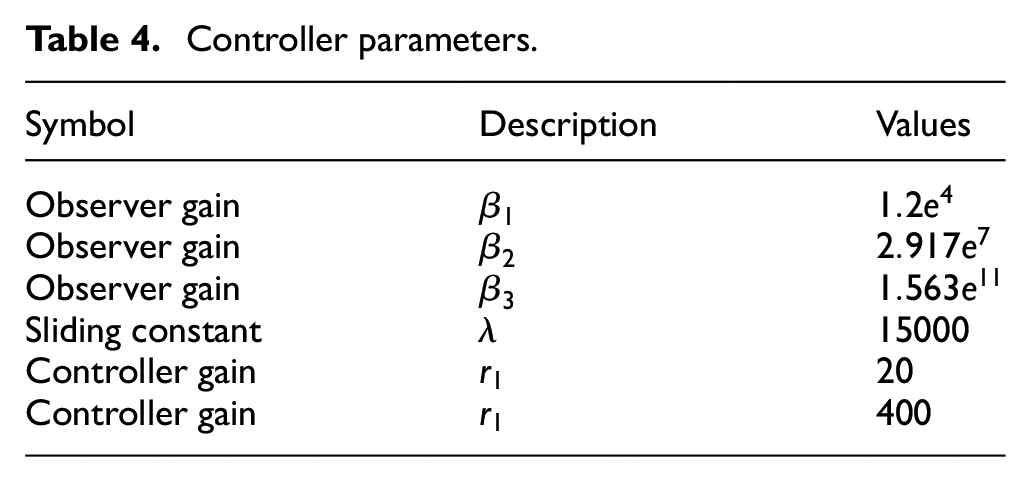
The effectiveness of the proposed continuous dynamic SMC is validated through MATLAB Simulink. The performance of the proposed controller is compared with the back-stepping controller presented in Diouri et al. 12 The discrete components values used for simulation and designed controllers parameters are presented in Tables 3 and 4, respectively. This study compares the performance of the inverter under three operational conditions; at nominal load, sudden linear load variations, and highly non-linear rectifier load.
Characteristic values used for simulation.
Controller parameters.
Nominal load
At nominal load, the proposed controller accurately follows the reference voltage and the tracking error immediately converges to 0 as shown in Figure 7(a) and (b), respectively. It is clearly shown in Figure 7(b) that the tracking error for the backstepping controller is
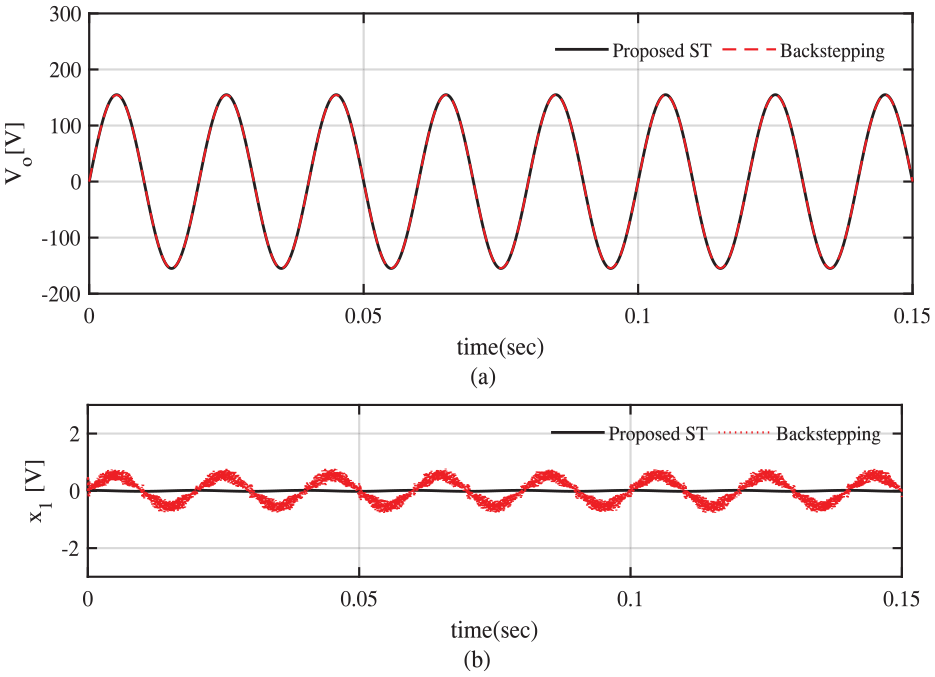
(a) Output voltage and (b) tracking error.
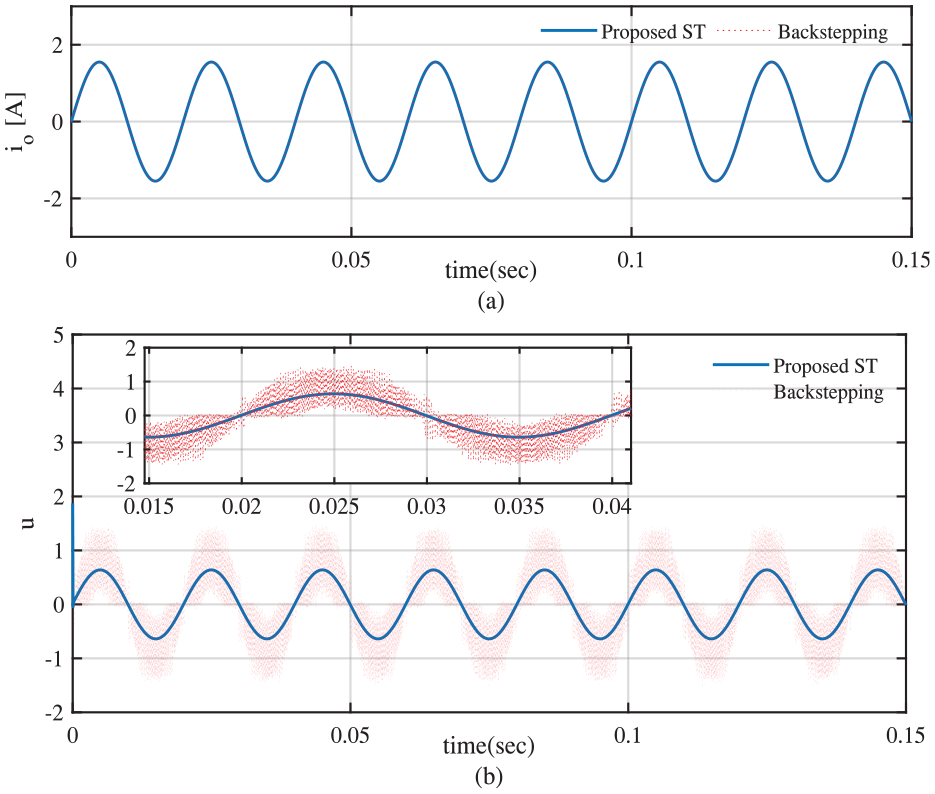
(a) Load current and (b) control input.
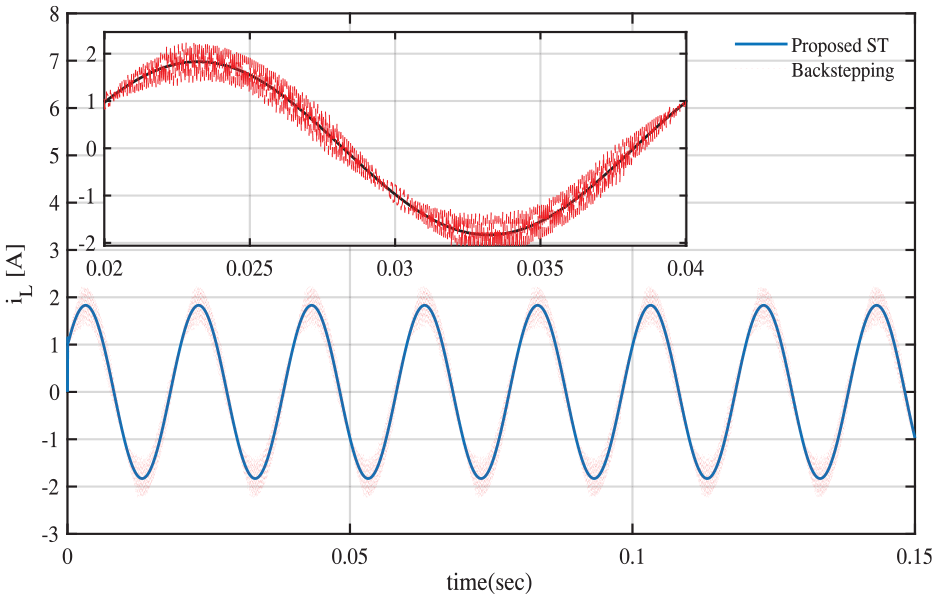
Inductor current.
The state and disturbance estimation errors are presented in described in Figure 10(a) and (b) which shows that the NLESO estimates the system states and disturbance with accuracy. The sliding surface is presented in Figure 11 which shows that states converge to 0 in a twisting fashion and the steady state error is 0.
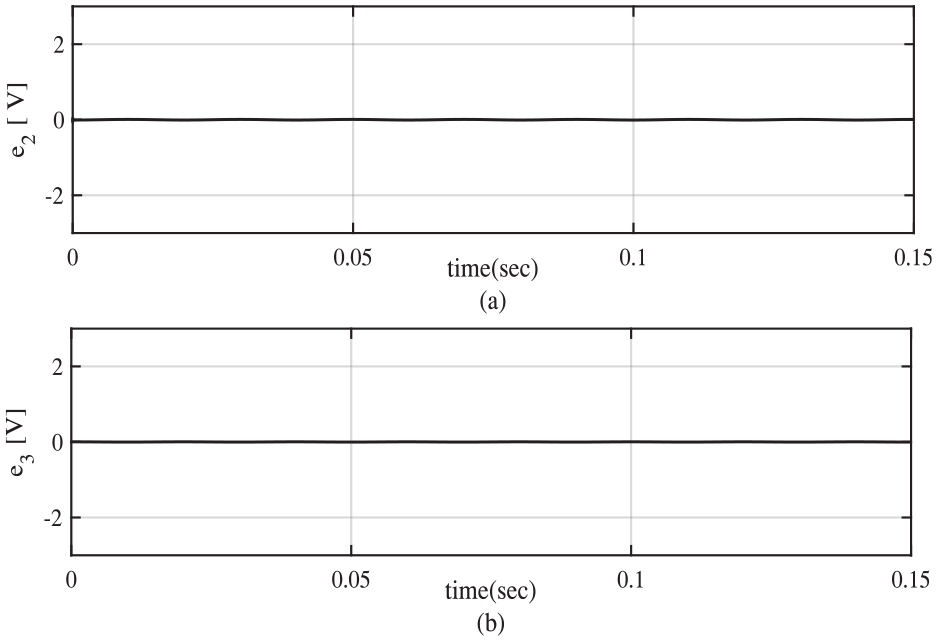
(a) State estimation error and (b) disturbance estimation error.
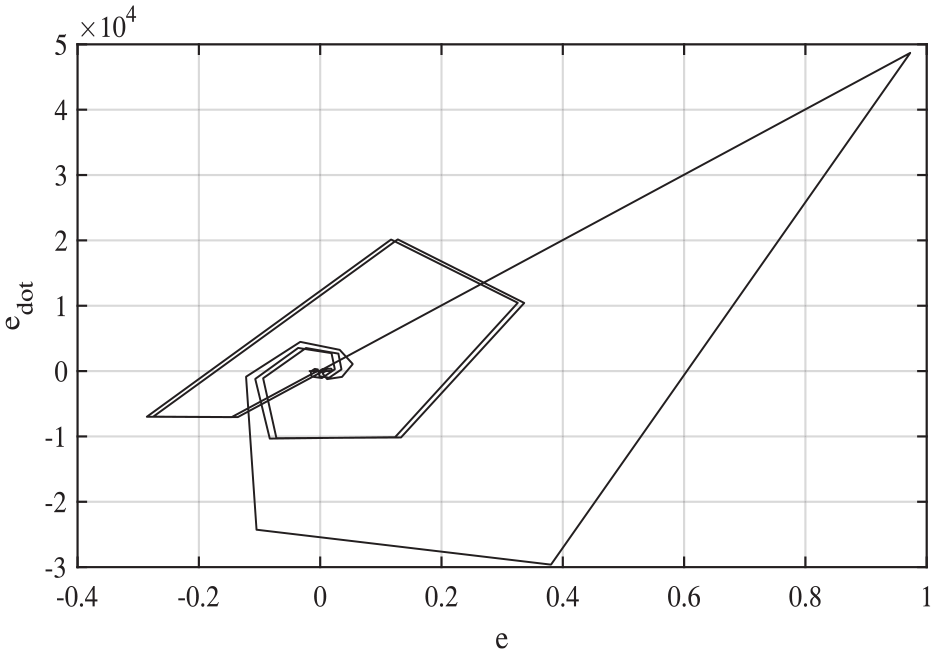
Sliding surface convergence.
Linear load variation
A step variation in the linear load has been made according to (60) where these resistive load variations occur on the system after the system has already reached the steady-state condition. In this case proposed algorithm exhibits excellent tracking performance for output voltage as shown in Figure 12(a) whereas a ripple of

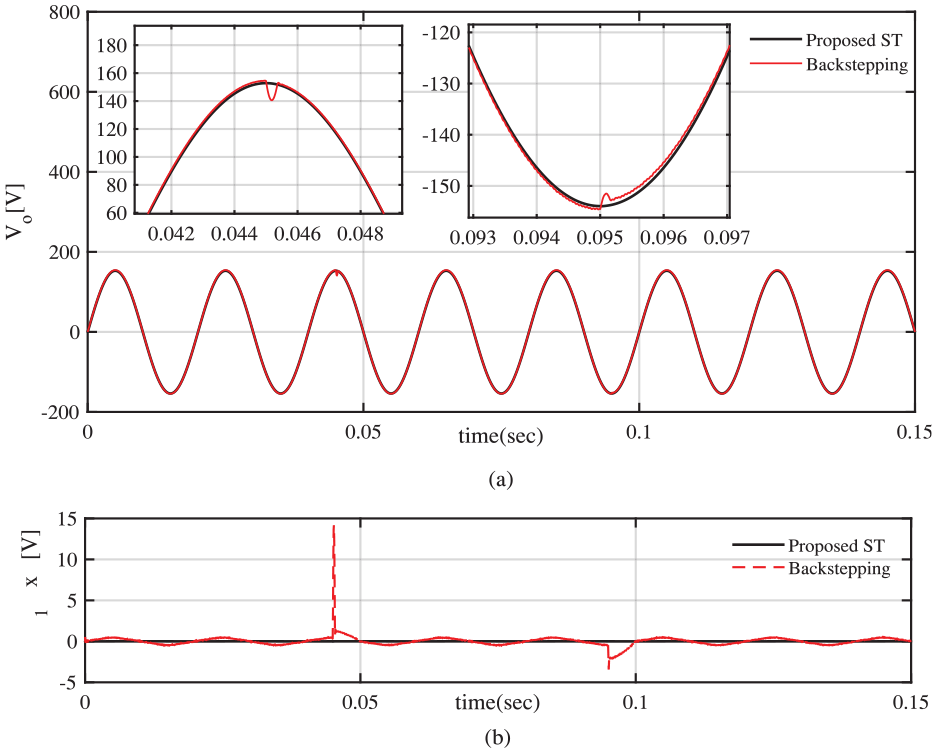
(a) Output voltage and (b) tracking error.
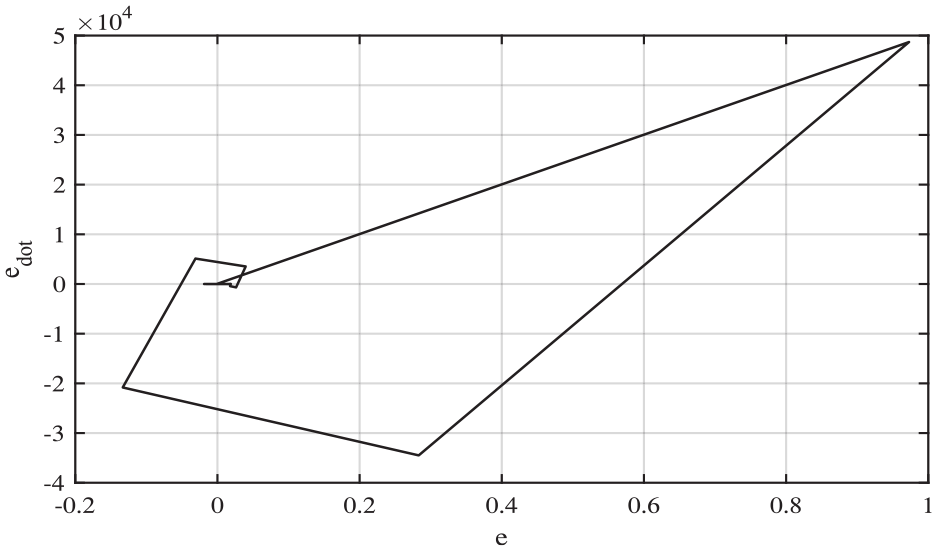
Sliding surface convergence for load variation.
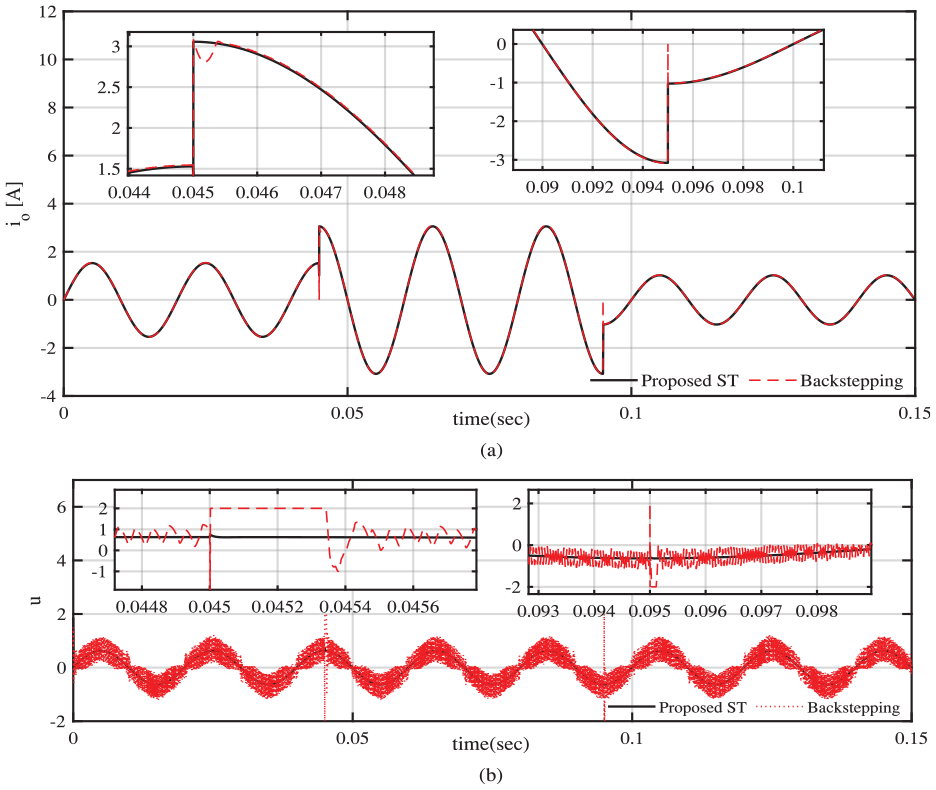
(a) Load current and (b) control input.
Non-linear load
The inverter’s output is connected to a full-wave bridge rectifier, which is common and widely used as a nonlinear load for charging batteries as shown in Figure 1. Under this type of load, the proposed ST controller exhibits robust reference tracking capability as shown in Figure 15(a). The rectifier current is smooth, and tracking error converges to 0 immediately for proposed as presented in Figure 15(b) and (c), respectively. Whereas, for backstepping controller case the tracking error is

(a) Output voltage, (b) output current, and (c) tracking error.
Total harmonic distortion
The proposed NLESO based STC algorithm exhibit superior performance in terms of harmonic rejection for both linear and non-linear loading conditions. For linear loads, the THD is
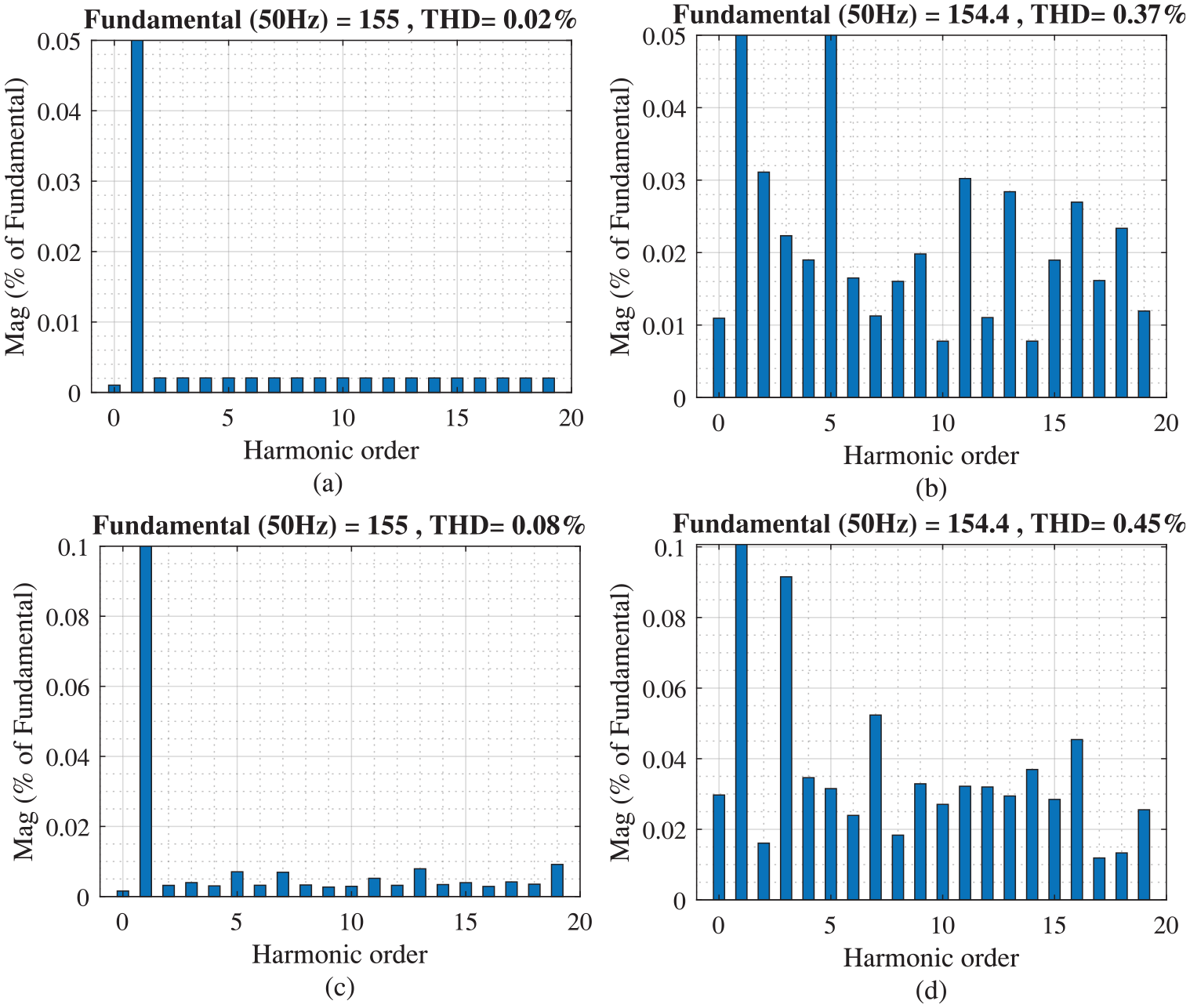
(a) THD at linear load for ST control, (b) THD at linear load for BS control, (c) THD at non-linear load for ST control, and (d) THD at non-linear load for BS control.
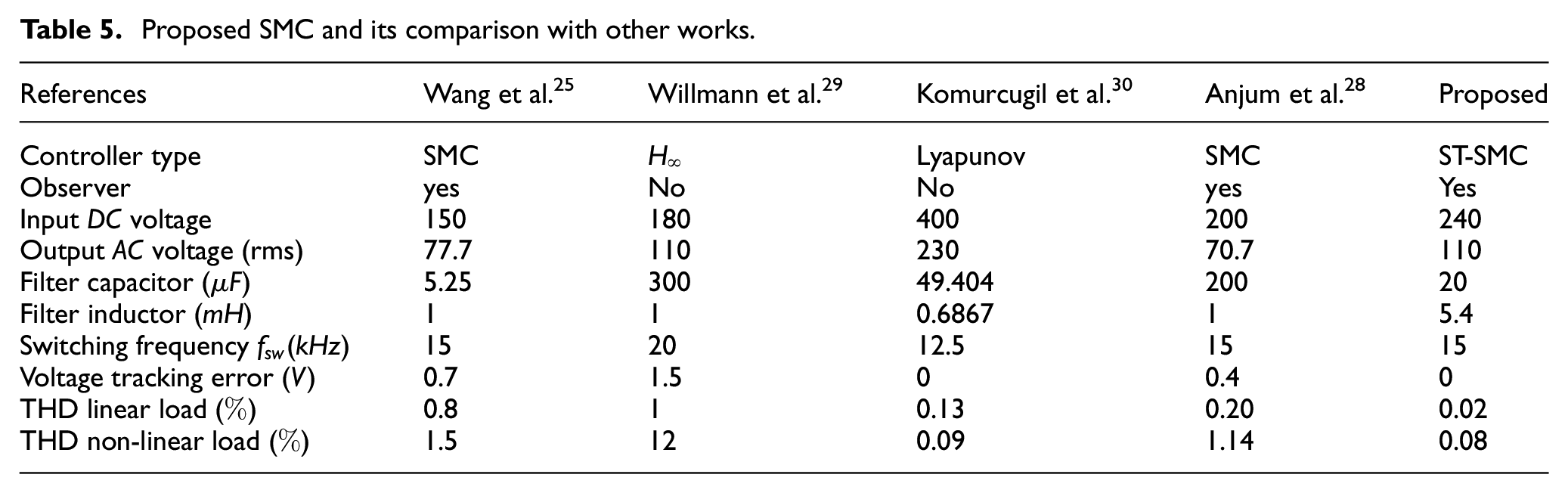
Proposed SMC and its comparison with other works.
Conclusion
In this paper, a higher-order SMC of single-phase VSI with non-linear extended state observer has been presented for voltage reference tracking and THD removal against linear and non-linear load disturbances. The proposed observer estimates the lumped parameter disturbances along with system states in the presence of load disturbances. Simultaneously, the complexity of optimal gain design has been removed by using the PSO technique. After the proper estimation of system disturbances, the super twisting controller can be implemented with smaller gain values, reducing the chattering effect and minimizing the THD. The proposed algorithm has been compared with the backstepping controller. The simulation results depict that the designed dynamic ST-SMC controller tracks the reference voltage
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.