
Abstract
When planning the path of a non-urbanized road, the default ant colony optimization (ACO) algorithm does not consider complex road state function such as uneven surface, road attachment coefficient, and vehicle turning angle limit. Based on the actual situation of roads and vehicles, a pavement state function that considers uneven areas such as road bumps and pavement attachment is proposed to improve the description of path length. Then, a heuristic function based on the A* algorithm and an improved mechanism for the initialization of pheromone distribution is proposed, which changes the blindness of ant colony search, accelerates the convergence of the ACO, and improves the search efficiency. The global search capability of the algorithm is enhanced by improving the path selection strategy and path transition probability function. The pheromone updating method is improved by using the MAX-MIN Ant System, which increases the algorithm diversity and avoids local optima. Further, using the pruning algorithm to reduce the number of paths significantly increases the convergence speed. Simulation results show that the improved ACO algorithm has better convergence speed and global search ability. Combining road state processing with vehicle corner processing can effectively improve the safety, adaptability, and reliability of autonomous vehicles. And the global optimal path planning of unmanned vehicles on complex roads can also be realized.
Introduction
Path planning is an indispensable part of autonomous navigation and obstacle avoidance for unmanned vehicles, and has become a hotspot. Path planning refers to the devising of an optimal or suboptimal path without collision from start to destination in an environment with obstacles while satisfying all constraints. It is one of the key technologies for realizing vehicle intelligence. 1 Path planning algorithms are grouped into global and local path planning. 2 Global path planning is generally based on the known road environment to plan a path. The accuracy of path planning depends on the degree of environmental information acquisition, which can generate the best path and avoid local minima. Local path planning is a dynamic planning algorithm, which is usually used in overtaking, obstacle avoidance, and other scenarios. Path planning algorithms, according to the techniques used, can be also divided into the following four groups:
Search-based algorithms
These algorithms mainly discretize the state space into a graph in a deterministic way. Feasible paths are then searched using heuristic search to obtain optimal solutions. Maurovic et al. 3 used the shortest path graph search algorithm based on D*. However, it results in too many traversed nodes and complex calculation problems. Based on this algorithm, a heuristic function was added to find the shortest distance between a search node and a target node. The results indicated that the A* algorithm has the advantage of searching for the optimal trajectory quickly and effectively. 4 It is predominantly used for global path planning problems in low-dimensional space as it tends to be more complete in such problems.
Sampling-based algorithms
In contrast to search-based methods, sampling-based path planning does not need to model the environment completely. In addition, these algorithms have the characteristics of random sampling, fast search speed, and high planning efficiency. Typical algorithms include RRT and RRT*, which are probability complete algorithms. They have natural support for solving high-dimensional complex problems and are often used in global path planning. However, they have the problem of optimizing and searching many nodes in the space. Thus, they improve the path quality at the expense of computational efficiency. When dealing with high dimensions, high degrees of freedom and non-economic constraints, this performance tradeoff will lead to more difficulties. 5
Trajectory planning method
The trajectory planning method is necessary if we want consider the motion equation during the planning process. It is often used in local path planning. The typical method is based on the optimal control method, which can obtain the time information corresponding to the path points. Its most important advantages are strict satisfaction of boundary conditions and uniform treatment of various kinds of constraints. 6 Wang et al. 7 proposed a trajectory planning method with synchronous planning and control, which considers various constraints and deals with external disturbances, improves the online computational efficiency, and realizes fast path planning. However, when there are many obstacles in the vehicle driving environment, such methods may be very time-consuming due to the need to solve complex optimization problems, and the inherent non-convexity make the problem hard to converge without proper initial guesses. 8
Intelligent optimization algorithms
With the development of intelligent control technology, various intelligent optimization algorithms have been used in path planning. These algorithms have the characteristics of self-learning, self-determination, and self-adaptive search, obtained by simulating the biological behavior of groups. They include genetic algorithms,9,10 the particle swarm optimization algorithm, 11 firefly algorithm, 12 artificial fish swarm algorithm, 13 artificial bee colony algorithm, 14 pigeon-inspired optimization algorithm, 15 and ACO algorithm.16,17and their combinations. 18 Among them, the ACO algorithm has strong robustness, good global optimization ability, and inherent parallelism. Moreover, it can be easily combined with various heuristic algorithms to improve the performance of the algorithm. Therefore, it is widely used in global path planning. 19 However, in some application scenarios with practical computational time constraints, it cannot avoid the possibility of falling into local optima. 6
This paper is primarily focused on global path planning based on the improved ACO algorithm. The ACO algorithm was proposed by Dorigo et al. 20 It is a distributed bionic algorithm with strong robustness, However, the default ACO has the problems of slow convergence and easy to fall into local optima. To this end, many methods are proposed to improve the performance of the default ACO algorithm. For example, Zhu et al. 21 combined the A* and ACO algorithms to obtain an improved ACO algorithm for robot path planning. The heuristic function is adaptively adjusted, the evaluation function of the heuristic A* algorithm is used for reference in the later process of the path, and the direction information is introduced into the heuristic function of the Ant Colony System (ACS) algorithm to improve its search efficiency. Zheng et al. 22 used pseudo-random state transition rules to select paths, calculate the state transition probability according to the current optimal solution and the number of iterations, and adjust the deterministic or random selection proportion. The optimal and worst solutions were introduced to improve the global pheromone update method and a dynamic penalty method to solve the deadlock problem.
The ACO algorithm applied to unmanned vehicle path planning is a simple shortest path planning algorithm. However, considering road conditions and the complex surrounding environment, such as the presence of pits, bulges, and other road irregularities, and the uncertainty of the road adhesion coefficient, how to be more efficient, safe, and reliable with the minimum energy consumption, obtaining the optimal global path planning from point to point is still a subject worth studying.
This paper proposes an improved ACO algorithm to achieve the above objectives. The main research contributions of this study are as follows: (1) Most previous studies only consider the shortest path, but in this paper, we propose a road state function and redefine the path length, so that we can sense complex road conditions, such as road leveling and ponding, through cameras and lidars sensors installed on unmanned vehicles, and better reflect the actual road conditions of vehicle movement. (2) A heuristic function combining the A* algorithm and the road state function and an initial pheromone allocation mechanism considering the turning angle of the vehicle is proposed, and the path pruning algorithm is used to avoid the “local detour” search path, changed the blindness of the ant colony algorithm in the complex road environment, accelerated the convergence speed of the algorithm, and improved the search efficiency; (3) Improved the path selection strategy and the path transition probability function, and based on the MAX-MIN Ant System, proposed an optimal path pheromone incremental selection strategy improves the pheromone update method, increases the diversity of the algorithm, avoids entering the local optimal solution, and improves the global search ability of the algorithm in complex road environments.
The remainder of this paper is organized as follows. Section 2 presents the problem description and environment modeling. Section 3 describes the proposed improved ACO algorithm for global path planning. Section 4 presents the simulation. Section 5 concludes the paper.
Problem description and model settings
Problem description
The global path planned by an unmanned vehicle is not a simple shortest path. Careful consideration is given to the vehicle’s front wheel turning angle, road surface unevenness, other road smoothness conditions, and the road surface adhesion state. Cameras and other sensors are used to detect the bumpy area of the road surface in the global path and the static obstacles on the ground, such as vehicles and railings. The subsequent path is then chosen based on the road state.
Model building
To ensure the best driving state for unmanned vehicles in road environments, the grid method is used to divide the environment according to the road information conditions, and static obstacles on the ground are identified, and otherwise impassable areas are noted. As shown in Figure 1, it can be represented by a two-dimensional grid map, and the impassable regions such as static obstacles on the ground can be represented by “0”; otherwise, they are represented by “1.” Zero and one’s matrix is used to describe the unmanned driving static obstacle grid environment information for vehicle operation. Let the grid model be M rows by M columns, in the order from left to right and top to bottom. The first grid coordinate in the upper left corner is then (1,1), START represents the starting point, GOAL represents the endpoint, the serial number is n, and the grid coordinates are (x, y). Then,

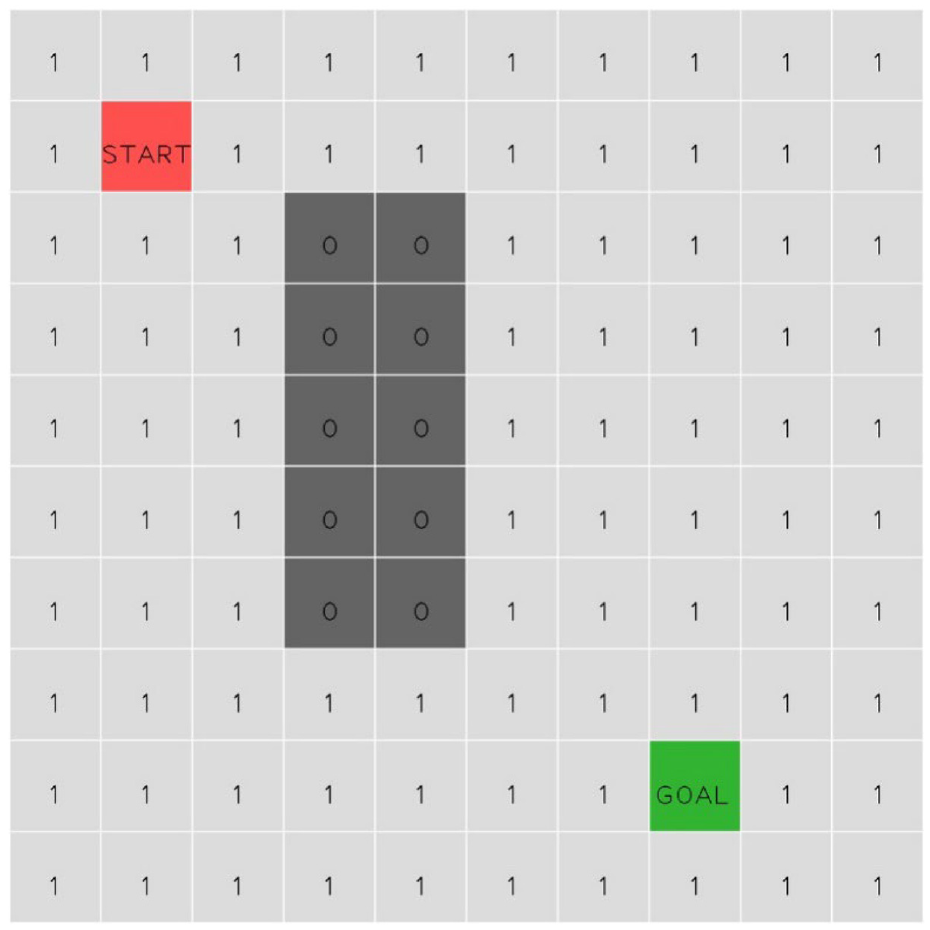
Grid Map Model: 1, free area; 0, obstacle area.
In this paper, the unmanned vehicle is regarded as a mass point; considering that the vehicle is a front-wheel-drive system, the front wheel is the driving wheel, and the front wheel angle
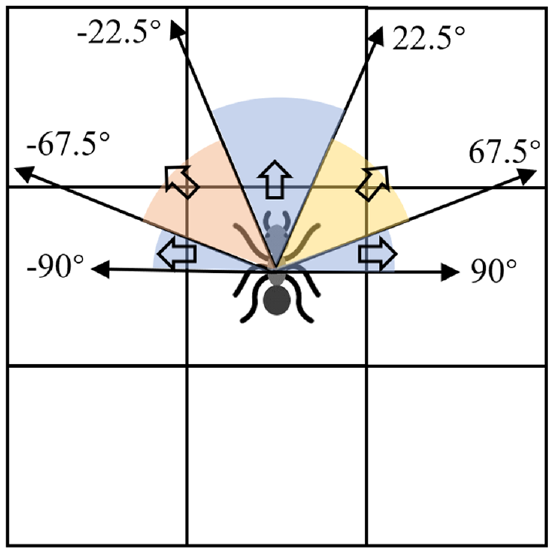
Vehicle steering angle range.
Definition of road surface condition function
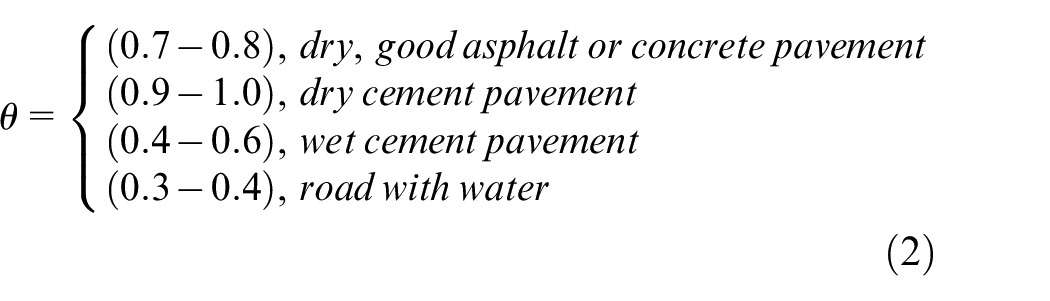
In a real environment, the motion of the vehicle depends on the ground, so the terrain greatly affects the motion of the car.
23
In this study, we map the road state according to the sensor perception into the grid map, and describe each grid according to the road leveling and attachment conditions. As shown in Figure 1, each number in the grid represents the road surface state of the node. The road surface state is combined in this study with the concave–convex area and road attachment state. A road state function

In equation (1),
The road surface state (
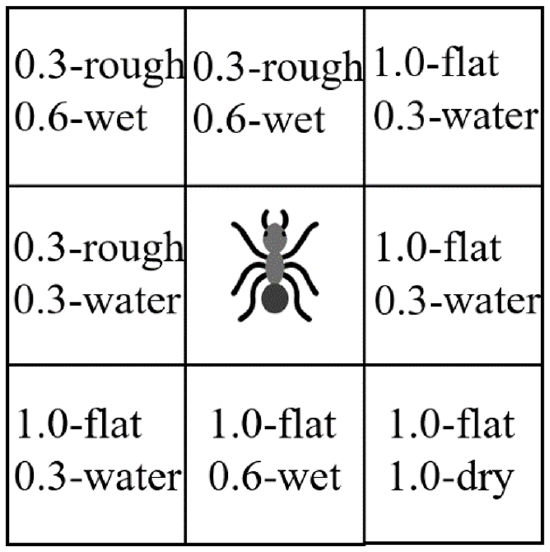
Description of road surface state.
Definition of path length
When the unmanned vehicle performs path planning from the starting point to the ending point, it needs to select a path according to the road smoothness and road attachment state of the adjacent nodes around each node, to ensure that a globally optimal path can be obtained and vehicle driving safety, stability, and reliability can be realized. To map the road surface state to the grid map, it is necessary to convert the flat state such as unevenness and road attachment into the length of the path in the grid map. Consequently, for any node
where
Improved ACO algorithm
ACO algorithm description
The ACO algorithm, which was proposed by Dorigo et al. 20 in the early 1990s, is a new type of evolutionary algorithm. With the introduction of a positive feedback parallel mechanism, the algorithm has the advantages of strong robustness, excellent distributed computing mechanism, and easy combination with other methods.
The path transfer probability is as follows:

In equation (4),

Throughout the cycle, ants will continue to release pheromones, while the previous ants will continue to disappear. We can set a parameter


In the equation,
Algorithm improvement
The default ACO algorithm basically considers only the ideal conditions of the road, which results in poor practical application effect. This paper considers the actual road environment of unmanned vehicles, constructs a new mathematical model, and improves the ACO algorithm to achieve a rapid optimization effect.
Improvement of initial pheromone distribution
When the ACO algorithm searches for the first time, the pheromone uniform distribution method is used. The pheromone on each path is initialized to a constant



In equation (9),
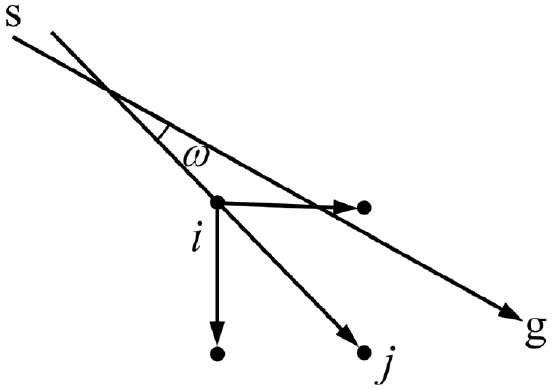
Angle between path search direction and starting point to end point direction.
Improved heuristic function
The transition probability of the default ACO algorithm depends on pheromone and local heuristic functions, both of which are determined by the path length. However, on the actual road, the selection of the optimal road by the unmanned vehicle also needs to consider factors such as the road surface state on the path. This paper proposes an adaptive heuristic function that integrates the
The

In equation (11),

where
Improvement of path transition probability
Considering that in the actual environment, the turning angle of an unmanned vehicle is w≤

where

In equation (14),
In equation (13),
Improvements in path selection strategy
In the initial stage of the ACO algorithm, the pheromone concentration is set by differentiation. At the beginning of the path search, the ants will choose a path with a high probability of passing. However, the algorithm will fall into a local optimum state when the pheromone on the path gradually increases. Therefore, the path state selection strategy needs to be adjusted as follows 25 :
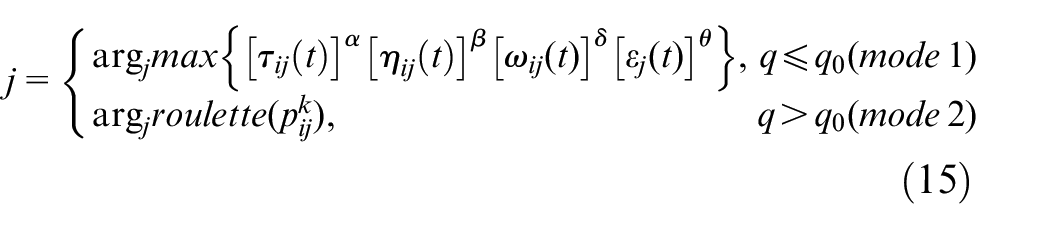
In equation (15),

In equation (16),

In equation (17),
Improved pheromone trajectory update rules
The selection of path nodes determines the convergence speed of ant colony search, and pheromones affect the possibility of path selection. All ants complete one cycle. At this time, the pheromone on each path the ants pass needs to be adjusted, which is an important factor affecting whether each ant can find the optimal path. Based on the possible changes in vehicle information in the driving process of unmanned vehicles, not only the global path pheromone update is needed, but also the local path pheromone needs to be updated. In this paper, we propose an improved pheromone update rule for the MAX-MIN Ant System (MMAS) based on the changes in vehicle driving information. The improved pheromone trajectory update rule is as follows.
① Setting of upper and lower pheromone limits
Set the upper and lower limits of the pheromone; the upper limit is

In equation (18),
② Global pheromone update
The unmanned vehicle path-planning process based on the ACO algorithm is mainly divided into algorithm optimality seeking and algorithm stagnation phases. 27 In the algorithm optimality seeking phase, it is desired to achieve fast convergence and maintain stochasticity; in the algorithm stagnation phase, it is expected to jump out of the local optimal solution, enhance the diversity of the algorithm, and strengthen the global search capability.

In equation (19),

where
③ Redistribution of path pheromones
When the algorithm enters the stagnation phase, the pheromone is maximum on the optimal path. At this time, to avoid entering the local optimal solution, the amount of pheromone needs to be adjusted to increase the algorithm diversity selection. This paper combines the concept of pheromone proportional update, 28 and proposes the allocation of pheromone increments for non-optimal paths based on the ratio of the current number of iterations to the maximum number of iterations to be determined adaptively:

In equation (21),
Path pruning
After each ant completes a path search, the output path will have a phenomenon of “local detour.” Using the pruning algorithm to prune the path can greatly increase the convergence speed. As shown in Figure 5, the algorithm steps are as follows:
Initialize the new path as empty; let
Let
Determine whether
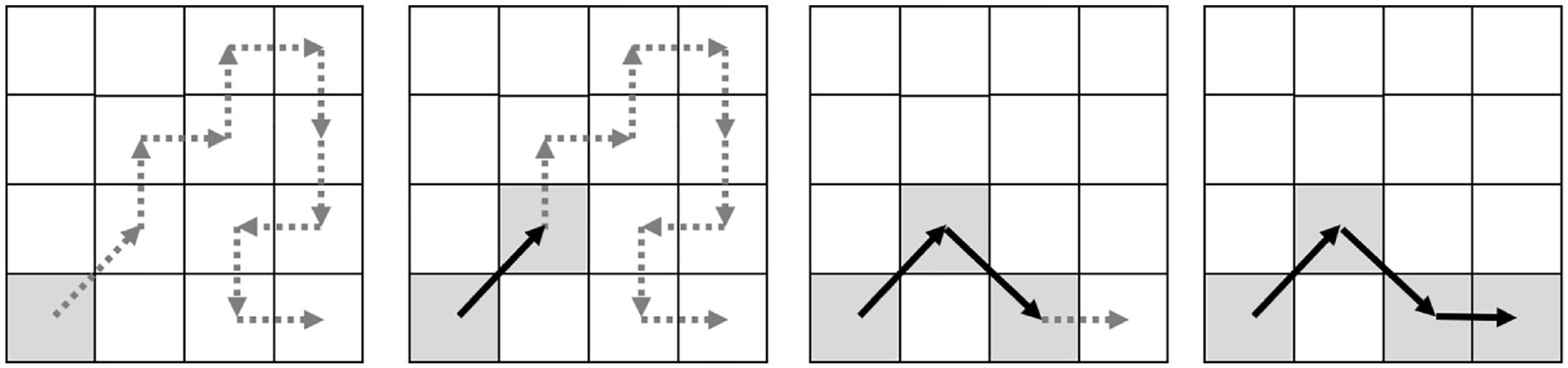
Path pruning algorithm. Dashed line: original path, solid line: pruned path.
The proposed algorithm
In summary, the specific path-planning steps for unmanned vehicles based on the improved ACO algorithm are as follows:
Step 1. Use the grid map to model the work environment and determine the start, end point, and static obstacles.
Step 2. Initialize the ant colony system. Set the number of ants m, number of iterations, and road state function. Then, determine the relatively important parameter
Step 3. Update the tabu table. Put ant
Step 4. Select the next mesh. Then, calculate the heuristic function according to equation (12), determine the value of
Step 5. If the ant reaches the target node, perform path clipping, replace the current path with the pruned path, and go to Step 6.
Step 6. Continue to repeat Step 3 until each ant finishes searching for the target during its iteration, then go to Step 7.
Step 7. Update the pheromone. After each iteration, if the number of iterations satisfies the inequality
Simulation experiments
To verify the effectiveness of the improved algorithm and compare it with the default ACO algorithm, we conducted a simulation comparison on the MATLAB 2020a simulation platform. First, a grid map was set up. The map was divided into 20 × 20 grids, and each unit was one. The starting point was (2,2), and the ending point was (19,19). According to the known road surface state, the grid map was obtained as follows:
In the Figure 6, “1” represents the drivable area (road smoothness and adhesion coefficient are both “1”); “0” represents the obstacle area; between “0” and “1” represents the road surface condition coefficient (first row: smoothness, second row: adhesion coefficient).
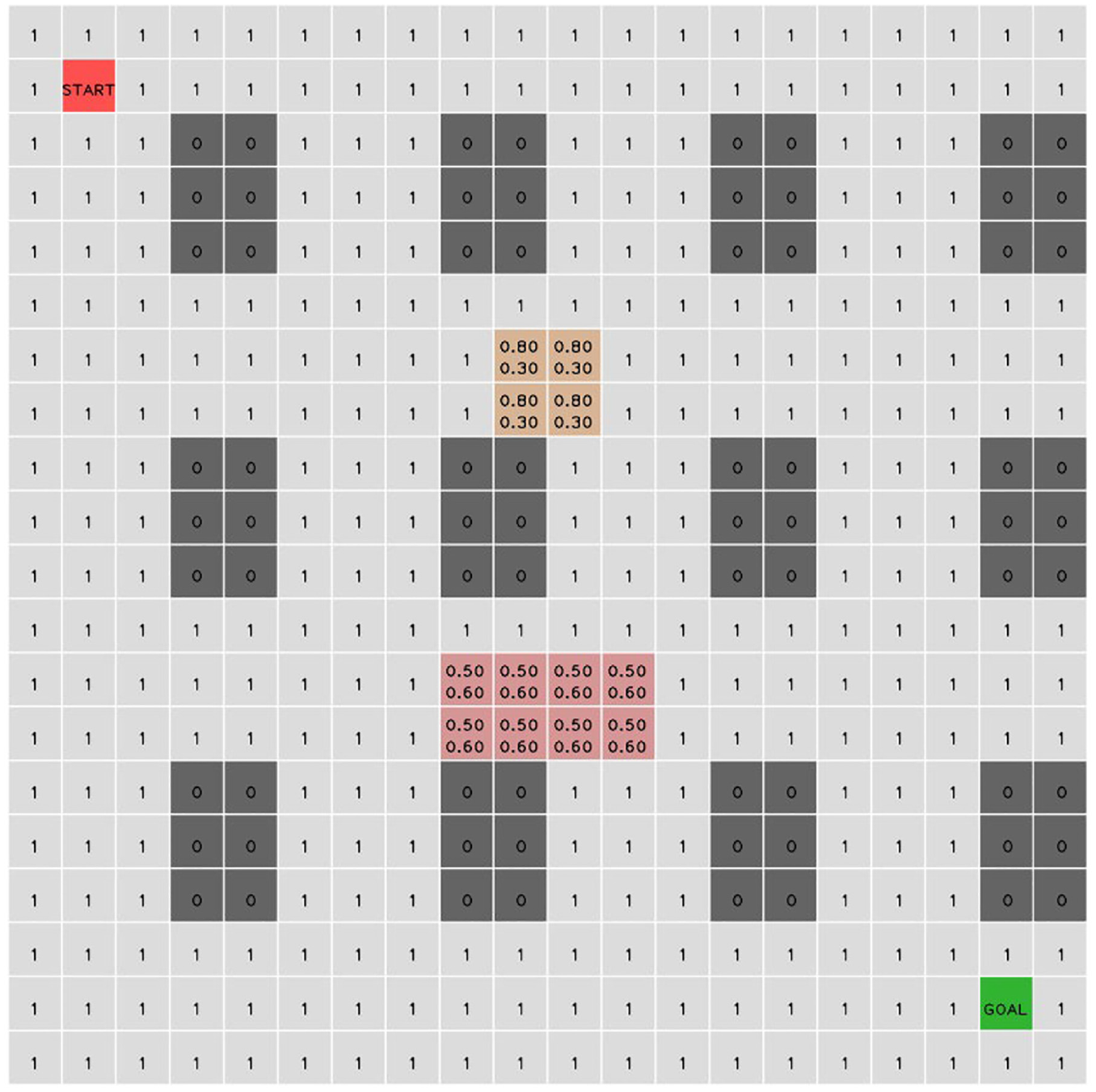
Description of experimental road surface state.
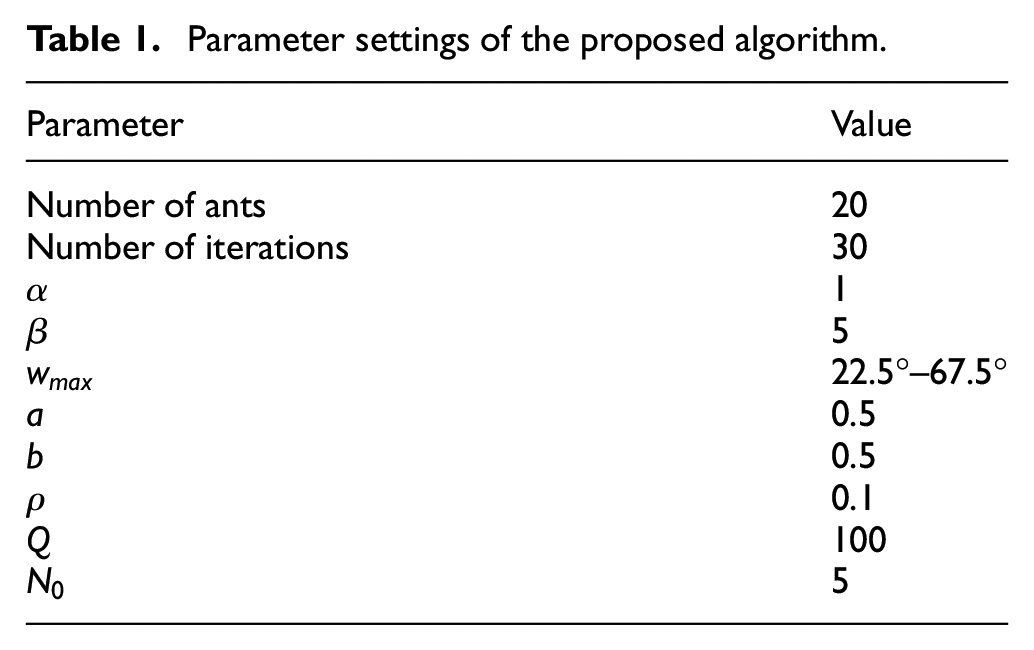
The parameter settings of the algorithm are shown in Table 1.
Parameter settings of the proposed algorithm.
Comparison of the effect of the pruned path algorithm versus the original algorithm
To better observe the effect of the path clipping algorithm, we set
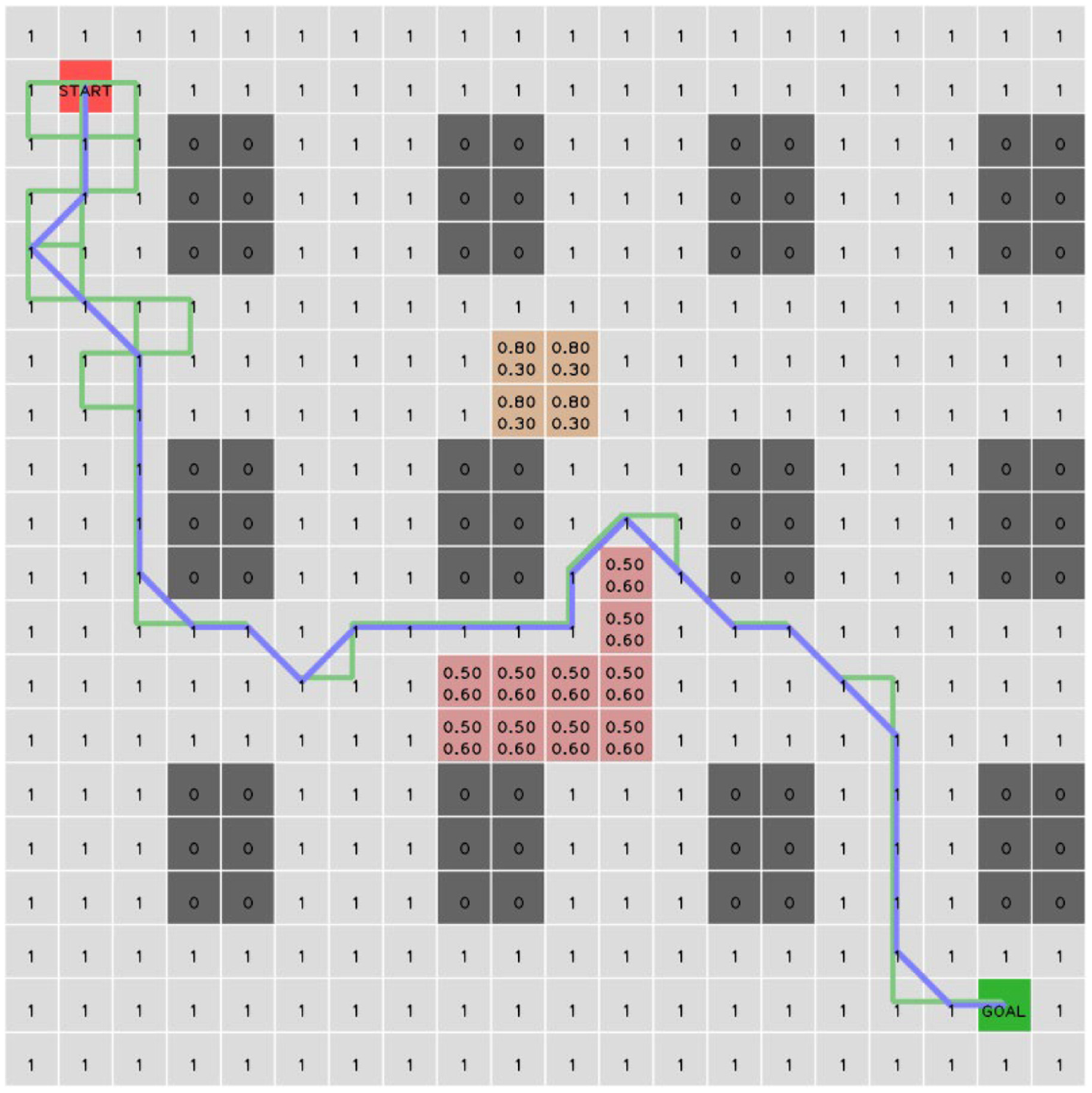
Results of path pruning algorithm (
The results, convergence curve, and time consumption of each algorithm are shown in Figure 8. Compared with the algorithm proposed in this paper, the default algorithms cannot bypass regions with poor surface state. The path length of the original ACO algorithm is much larger than that of the improved algorithm, and the difference between the converged path and the optimal path is large. After adding kinematic constraints, the search path will not make large-angle turns, so the path length will be greatly reduced. After adding the path clipping mechanism, the algorithm easily converges to a near-optimal solution. Adding all the above mechanisms to the algorithm in this paper, it could converge quickly and the path length was the shortest.
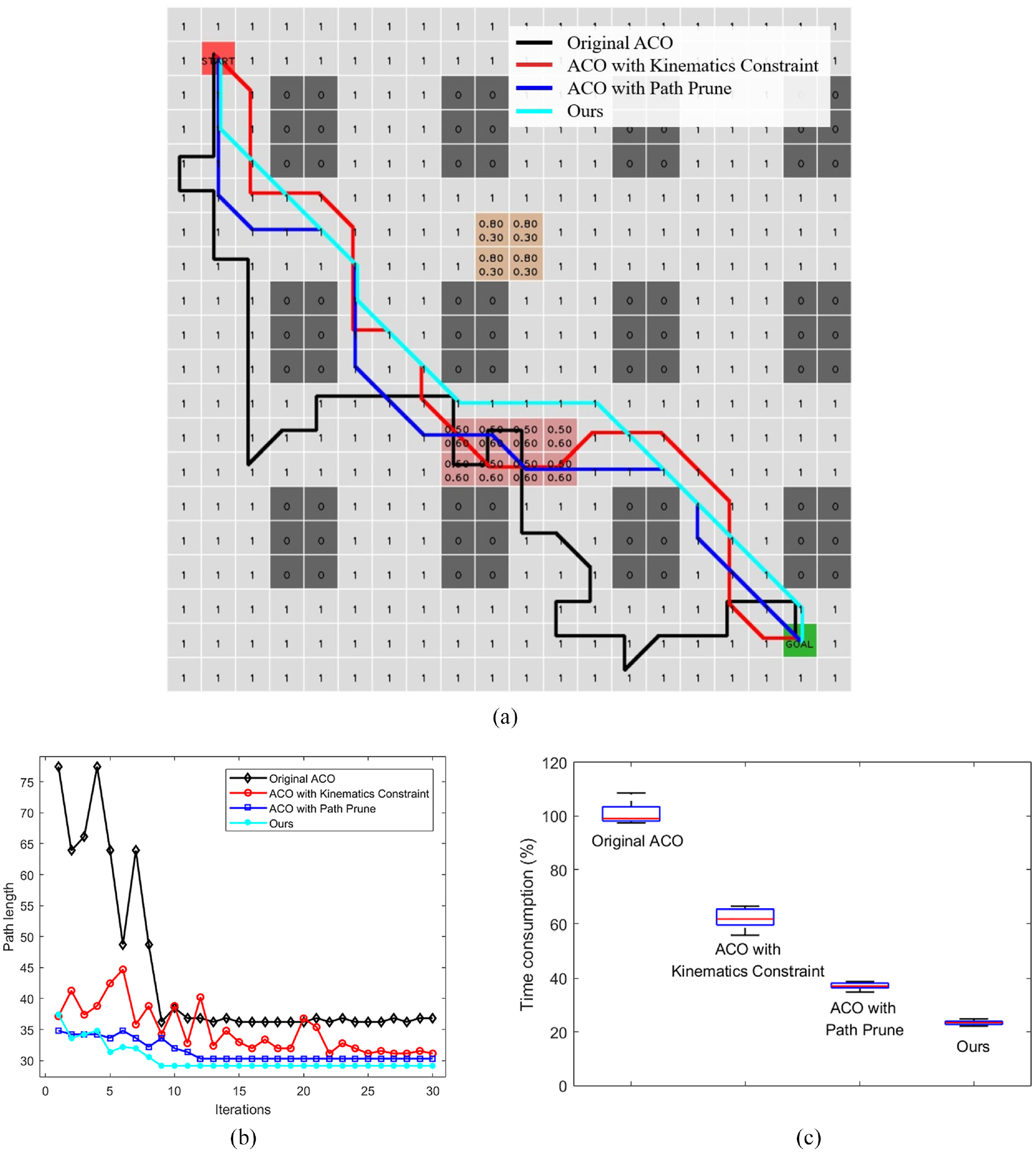
Comparison of algorithm results, convergence curves, and time consumption: (a) algorithm results, (b) algorithm convergence curves, and (c) time consumption.
In terms of time consumption, the improved algorithm greatly shortens the calculation time. After adding kinematic constraints, the algorithm will not search the rear area, which improves the search efficiency. After path prune, the algorithm will ignore the detour path and disperse pheromones on the critical path, which makes the convergence speed faster. After adding the above mechanisms, the search time is shortened to about 23% of the default algorithm.
Comparison with default A* algorithm and ACO
As shown in Figure 9, when the pavement state is set at (11, 12) and (12, 12), the default A* algorithm and ACO do not consider the pavement state, and the planned path passes through the area with poor pavement state and cannot be bypassed. Even if the A* algorithm adds a pavement state factor, a path with a turning angle that is too large will be planned, such as a turning angle of 90° at (12, 11) and (10, 12).
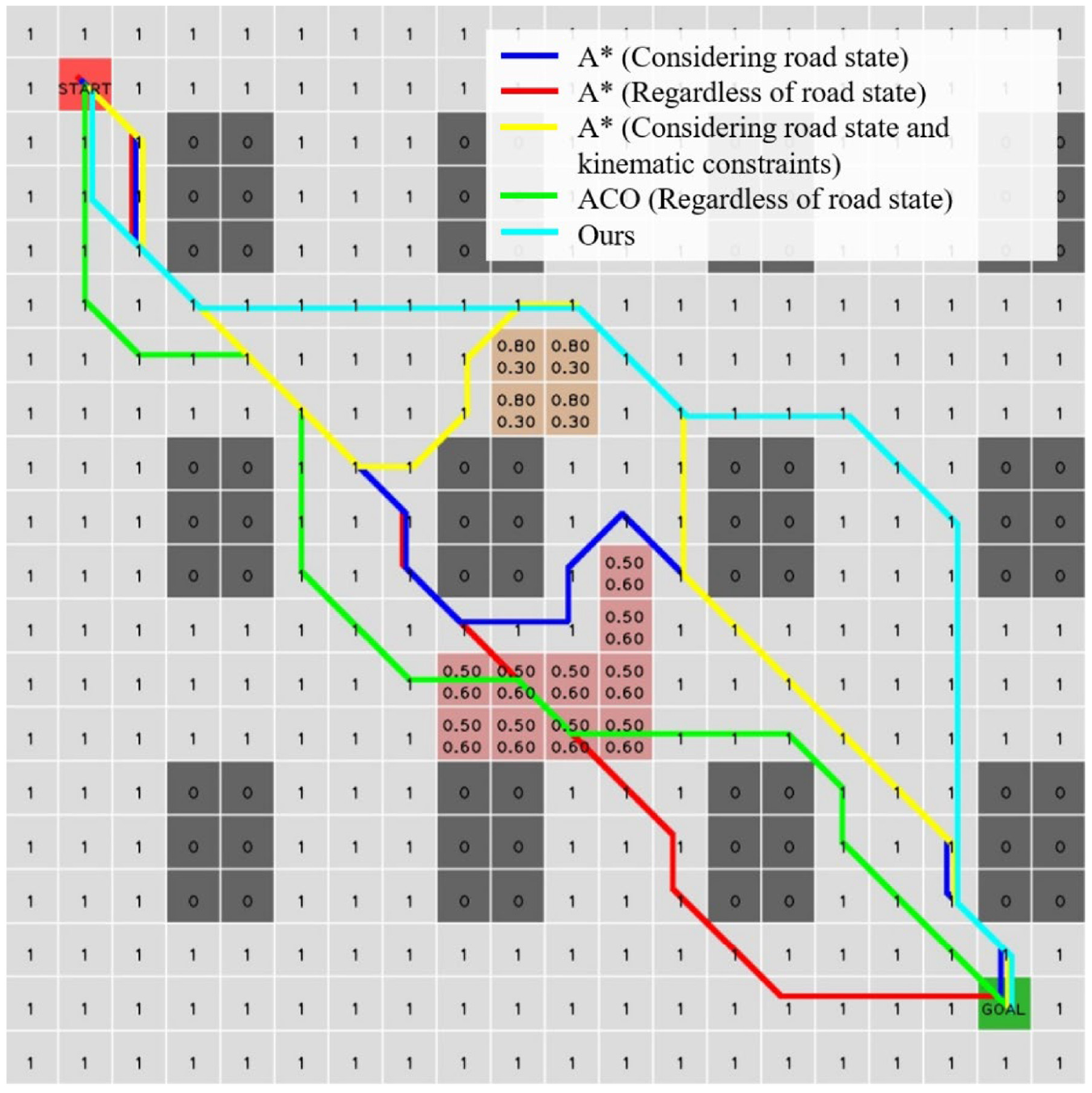
Comparison with the default A* algorithm and ACO.
Compared with the improved ACO algorithm proposed in this paper, after the default A* algorithm considers the road surface state and adds kinematic constraints, although the planned path turn angle is less than 90°, its path length is greater than the path obtained by the proposed algorithm, and it is not the optimal path. It can be seen that the algorithm proposed in this paper can plan a more reasonable path under complex road conditions.
Analysis of influence of pavement state parameters on results
In this paper, a pavement state description method is proposed and added to the ACO algorithm. When the vehicle is running on the actual road, the final planned path can be controlled by adjusting the road surface leveling state factor a and the attachment state factor b. As shown in Figure 10, when the values of a and b are large, the ACO algorithm will ignore the road surface state and identify it as a drivable area. When the values of a and b are small, the ACO algorithm will try to avoid passing the road areas with poor surface condition. Therefore, by adjusting the values of the a and b factors, the passing of the vehicle on the road surface with different levels of smoothness and different surface adhesion states can be controlled.
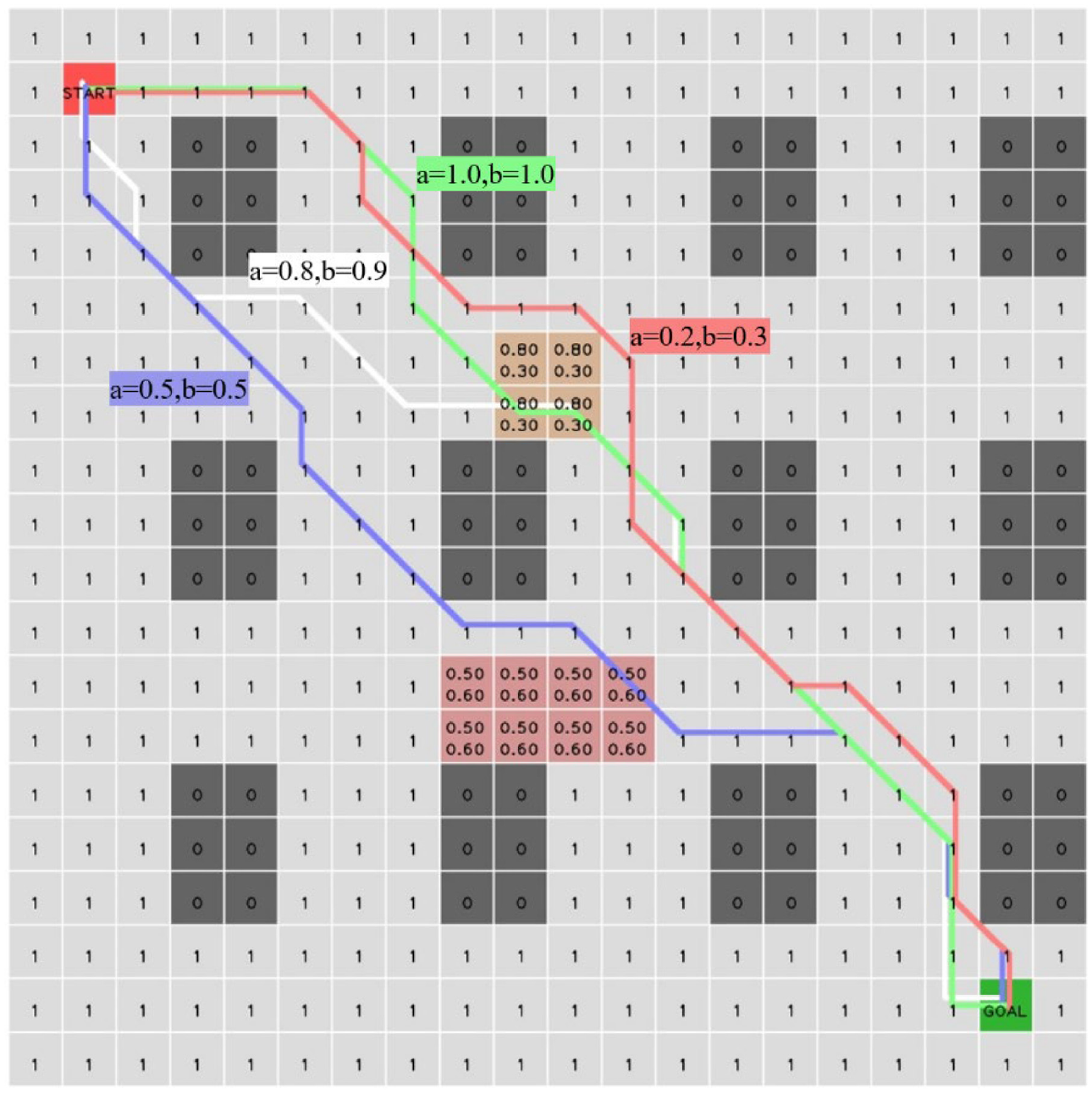
Influence of different values of a and b on the path.
Path search diversity
By improving the global pheromone update mechanism, this study ensures that the algorithm maintains diversity during path search. As shown in Figure 11, when other parameters are fixed, only by setting different random seeds, the output paths with large differences are finally obtained.
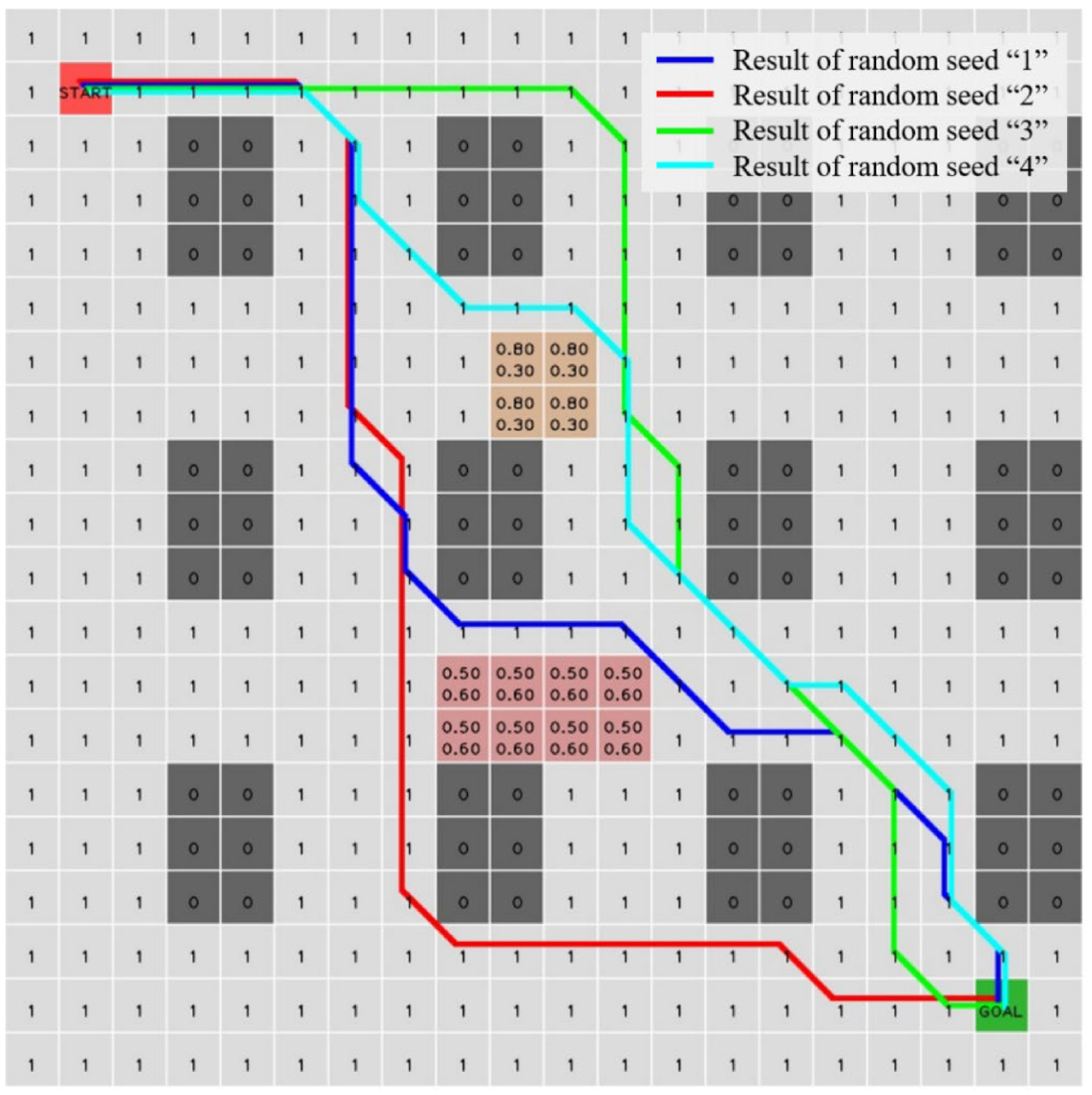
Path diversity (Using different random seeds, the final output path of the ACO algorithm is obtained.).
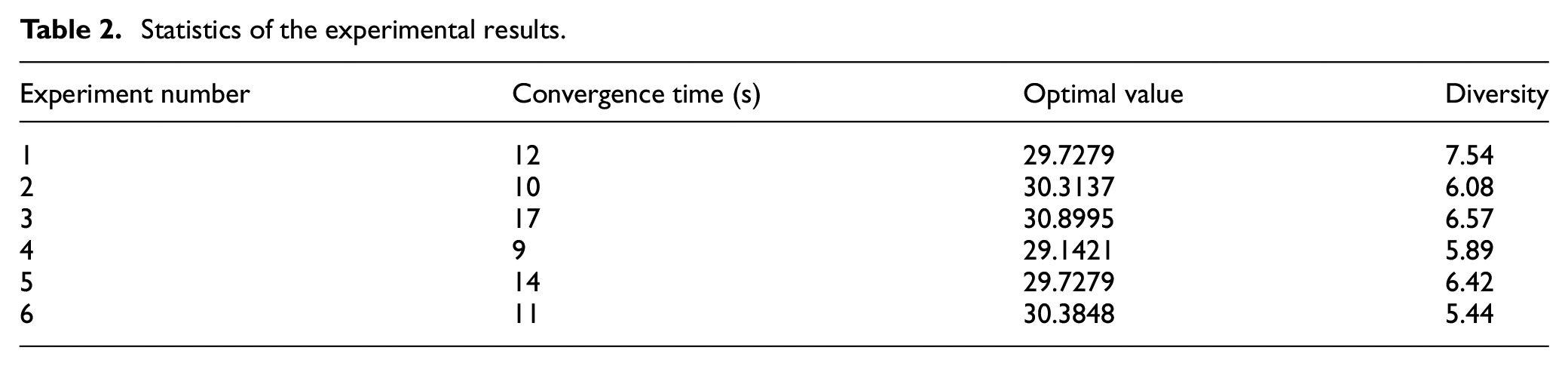
To assess diversity, define path diversity, “

where
Statistics of the experimental results.
Pheromone changes during algorithm iteration
To observe the pheromone changes in the iteration process of the ACO algorithm, we plotted the results of the 1st, 5th, 10th, and 30th iterations, as shown in Figures 12 and 13. Figure 13 shows the results of the no-path pheromone redistribution mechanism. The number in each square represents the pheromone content, and it is displayed as “0” when the pheromone content is less than 0.01. It can be seen that as the number of iterations increases, the pheromone finally converges to a path. Figure 13 shows the simulation results obtained when the path pheromone redistribution mechanism is added. It can be seen that the initial path and the final converged path show great differences, and the algorithm has the ability to jump out of the local optimal solution.
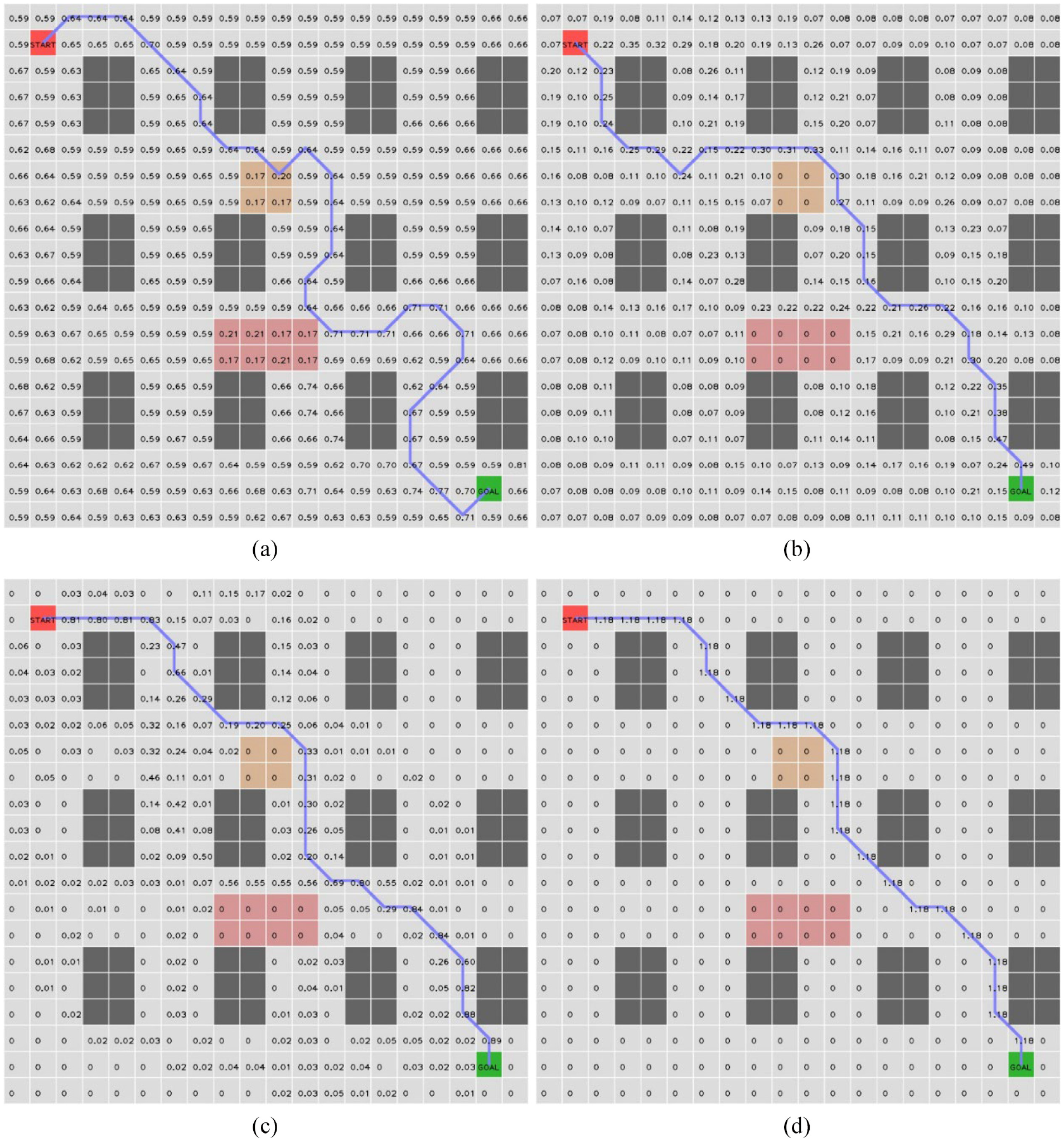
Results without pheromone redistribution mechanism. (The numbers indicate the pheromone content, and it is displayed as “0” when the pheromone content is less than 0.01.): (a) 1st iteration result, (b) 5th iteration result, (c) 10th iteration result, and (d) 30th iteration result.
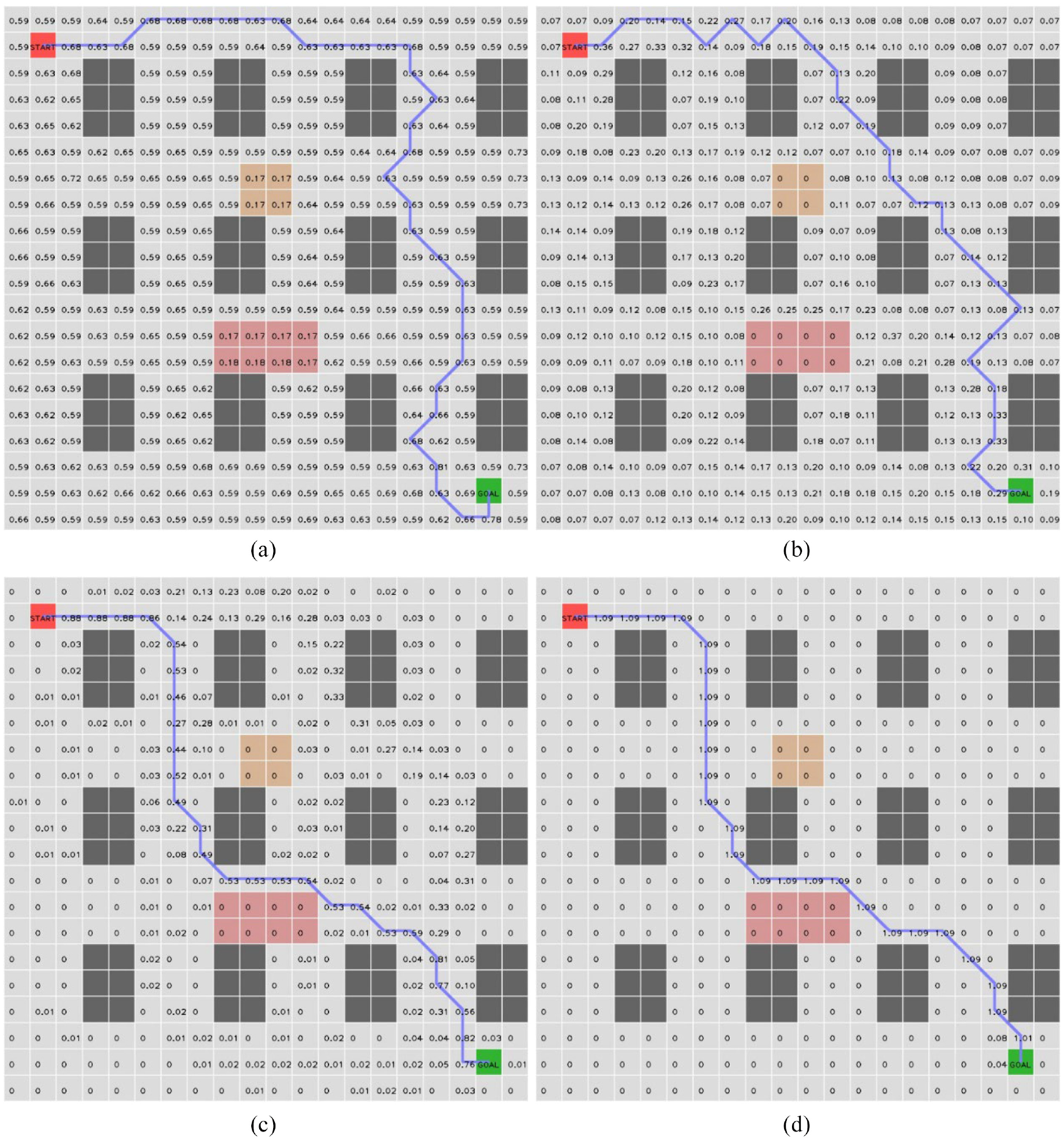
Results with pheromone redistribution mechanism. (The initial path and the final converged path show a big difference, and the algorithm has the ability to jump out of the local optimal solution.): (a) 1st iteration result, (b) 5th iteration result, (c) 10th iteration result, and (d) 30th iteration result.
Conclusion
An improved ant colony algorithm is proposed to aim at the road conditions of unmanned vehicles in a non-urban road environment. Under complex road conditions, a new type of road state function is defined, and a variety of ACO improvement strategies are proposed, which not only accelerates the convergence speed but also avoids the algorithm from entering local optimum. Simulation results show that the improved ant colony algorithm can effectively solve unmanned vehicles’ global path optimization problem under complex road conditions. This paper only considers the influence of general road conditions on global path planning. However, when the number of obstacles increases or the terrain obstacles become more complex, the complexity of the path planning algorithm increases significantly. Therefore, the next step will be to reduce the algorithm’s complexity further and speed up the search.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Technology Department of Jiangsu Province (2020Z411).