
Abstract
This work proposes a new kind of trajectory tracking controller for the differential drive mobile robot (DDMR), namely, the nonlinear neural network fractional-order proportional integral derivative (NNFOPID) controller. The suggested controller’s coefficients comprise integral, proportional, and derivative gains as well as derivative and integral powers. The adjustment of these coefficients turns the design of the proposed NNFOPID control further problematic than the conventional proportional-integral-derivative control. To handle this issue, an Enhanced Fruit Fly Swarm Optimization algorithm has been developed and proposed in this work to tune the NNFOPID’s parameters. The enhancement achieved on the standard fruit fly optimization technique lies in the increased uncertainty in the values of the initialized coefficients to convey a broader search space. subsequently, the search range is varied throughout the updating stage by beginning with a big radius and declines gradually during the course of the searching stage. The proposed NNFOPID controller has been validated its ability to track specific three types of continuous trajectories (circle, line, and lemniscate) while minimizing the mean square error and the control energy. Demonstrations have been run under MATLAB environment and revealed the practicality of the designed NNFOPID motion controller, where its performance has been compared with that of a nonlinear Neural Network Proportional Integral Derivative controller on the tracking of one of the aforementioned trajectories of the DDMR.
Keywords
Introduction
The mobile robot is a young field of a robot that represents a platform with tremendous mobility within its environment, it is not confined to one particular location, as it can move in its circumference autonomously. In other words, they have the ability to implement missions without a need for exogenous operators. 1
Currently, mobile robots have become an important part of our life starting from lawnmowers, to private usages such as domestic vacuum cleaners, service robots, and handling modules between assembly locations in manufactures. In Addition, mobile robots are used in dangerous areas such as military environments and nuclear-waste cleaning. 2
Velocity control of autonomous differential drive systems is also a very active area of research that has drawn magnificent considerations in recent years with most of the researches concentrating on feedback linearization, back-stepping, controlled Lagrangian, sliding mode control, proportional-integral-derivative (PID) controllers, and fractional-order PID controllers (FOPID). The wheeled mobile robot control problems can be divided into:3,4 – Point stabilization (steering the mobile robot to a target point, with the desired orientation). – Trajectory tracking (steering the mobile robot to follow a required curve, which is time-parameterized). – Path following (steering the mobile robot to follow a curve parameterized by a curvilinear distance from a specific point).
The control problem for the trajectory tracking is the design of control rules for the angular and linear velocities, and acceleration of the non-holonomic wheeled mobile to track the required path. The control scheme aims to decrease the error between the desired and the actual track. It occurs due to sensor errors measured from both external and internal sources. Also, it occurs due to slippage, disturbances, noise. The mobile robot cannot move instantly towards the direction orthogonal to its wheels axis due to the non-holonomic constraint. 5
In the last years, several control configurations were brought into the automation society to deal with the limitations of the old-style regulators e.g. the PID control ruled by the automation society is changed utilizing the idea of integrators and differentiators of partial order. To be more explicatory of showing the need to the usage of the controllers with fractional power; in classical feedback control theory using derivatives can be dangerous because the system becomes more sensitive to high-frequency noise by introducing a +20 dB to the gain slop. On the other hand, if the feedback loop is incorporated with integral action, then the relative stability of the closed-loop system will be reduced, this is because of adding a phase-lag of
The main difficulty of the use of the traditional PID and the recently developed fractional order PID (FOPID) controllers is the accurate selection of the control parameters, randomly or even manually setting these control parameters may not bring the desired response to the system especially in the case of system uncertainties. Moreover, the Ziegler-Nichols technique is applied only when the plant model is expressed as first-order with dead time. 7 Recently, swarm optimization algorithms have been developed, they depend on the demeanor of neuro-biological and nature-inspired systems, biological birds herd, most of them only require function evaluation (and not the derivative or integral operations). Examples are genetic algorithm (GA), 8 particle swarm optimization (PSO), 9 and Fruit fly optimization (FFO). 7
Many researchers have written on solving the problem of motion control of 2-Wheeled Mobile robots (DDMR) under non-holonomic constraints and so many different types of nonlinear controllers have been proposed in the literature for the trajectory tracking of such mobile robots. Recently, new techniques have been applied to trajectory tracking of DDMR, like sliding mode control, 10 Fuzzy Output Feedback Stabilization, 11 receding horizon control, 12 Smart PID optimized Neural Networks Approach, 13 distributed Non-Linear Model predictive control, 14 Robust adaptive tracking control, 15 Fractional-Order control,16,17 output feedback tracking control, 18 Control Lyapunov Function Design, 19 Adaptive neural networks. 20 P. Kumar et al. 21 proposed differential evolution technique and Bat algorithm for the multi-objective optimization with fractional-order PID (FOPID) and integer-order PID controllers. The simulation shows that the design of FOPID using a multi-objective bat algorithm gives better results than others. 22 proposed a Fractional Order PID and PID Controllers that are used for the pendulum on a cart. This system has one control input and two degrees of freedom. The Euler-Lagrange method is used to derive the model of the system and Fractional Order Controller is used to achieve the stabilization with constraints. The simulation result shows the Fractional Order PID Controller is better than Integer Order PID Controller. N. H. Abbas and B. J. Saleh (2016) 23 presented the design of a control scheme that permits the integration of a kinematic neural controller for trajectory tracking of a nonholonomic two-wheel National Instrument mobile robot. A nonlinear disturbance observer combined with an extended Kalman filter has been proposed in 24 to observe the velocity and the non-random disturbance of the DDMR. While in, 25 a proportional plus derivative control integrated with An adaptive fuzzy variable structure control is proposed to achieve trajectory tracking control for a DDMR with robustness to disturbances and uncertainties. In, 26 a nonlinear control law based on an optimization technique for wheeled mobile robots with non-holonomic constraints is proposed, the robustness of the proposed controller is increased using the integral feedback technique. Based on the flatness property of the robot’s kinematic model and in combination with velocity and attitude observers, the authors of 27 offered a dynamic feedback-linearization control law. The suggested observer-based control scheme needs only Cartesian position measurement.28–35
The contributions of this paper lie in twofold. Firstly,
This research paper is structured as given next. The motivation and problem statement is explained in The motivation and problem statement Section. a concise introduction to fractional control is presented in the Fractional Order Control section. Modeling of the DDMR is explained in the Kinematic Modelling Of Non-Holonomic Differential Drive Mobile Robot Section. The suggested NNFOPID controller structure and its parameter tuning are demonstrated in the Swarm-Based NNFOPID Controller For Trajectory Tracking of DDMR Section. The performance evaluation of the proposed controller is validated in the Simulation Results and Discussion Section. Finally, the work is concluded in the conclusion Section.
Motivation and problem statement
The control problem for the trajectory tracking is the design of the control laws for the angular and linear velocities and acceleration for the nonholonomic wheeled mobile to track the desired path. The control structure intends to reduce the mean square error (MSE) between the ideal and actual track. The error occurs due to sensor errors measured from both external and internal sources. In addition, it occurs due to slippage, disturbances, noise. The mobile robot cannot move instantly towards the direction orthogonal to its wheel axis due to the non-holonomic constraint. The motion control design of a non-holonomic mobile robot is so complicated in trajectory tracking than the holonomic ones with specific speed.
The proposed NNFOPID control law has the following main benefits as compared to integer-order PID control when both are applied for the motion control of the DDMR: 1. The proposed NNFOPID controller has wider stability margins (extending to the right-half plane) than the integer-order PID controller. 2. The NNFOPID controller presents a smoother and better trajectory tracking for the differential drive mobile robot (as will be shown next) with minimum MSE. This is due to the partial power of the integral and derivative actions. 3. Due to the existence of a fractional exponent in the integral and derivative terms for the fractional PID controller, a compromise solution may be achieved between the speed and stability of the system.
On the other hand, the reason for using the EFFO algorithm is that the algorithm has faster convergence with wider stability and accuracy margins than the standard FFO algorithm.
Fractional order control
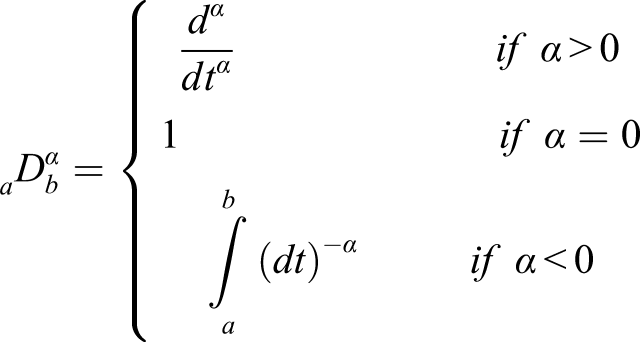
The universal form of fractional order calculus expressed as


Given any fractional-order system described by differential. Equation of fractional-order and linear-constant-coefficients as,
38


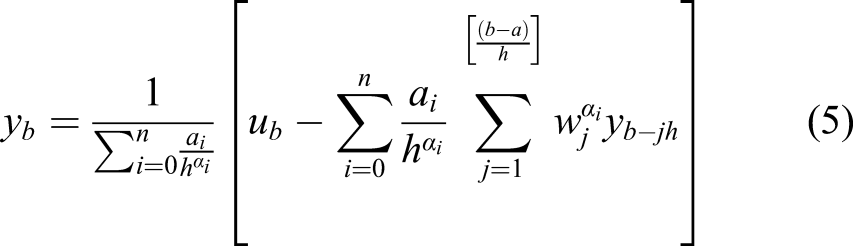
Recall the GL definition in equation (2), then by substituting it in equation (4); the numerical solution of the closed-form of the fractional-order differential equation can be found as
38

Now, assume the complete equation of equation (3), where ǔ(t)is on the right-hand-side and not u(t)
38

Therefore, ǔ(t) may be evaluated firstly as in the above equation, then, the time response under input signal u(t) can be acquired from the closed-form solution in equation (5).

The Fractional-order PID controller rises the effectiveness and the chance of better system performance due to the five coefficients it has, but at the same time, tuning of these parameters presents a challenging problem.
37
The equation of the FOPID control law with partial-power of integral and derivative actions expressed as PIλDα is stated as

By taking Laplace transform to equation (7), we get the following Proportional-integral-derivative controller from points to plane.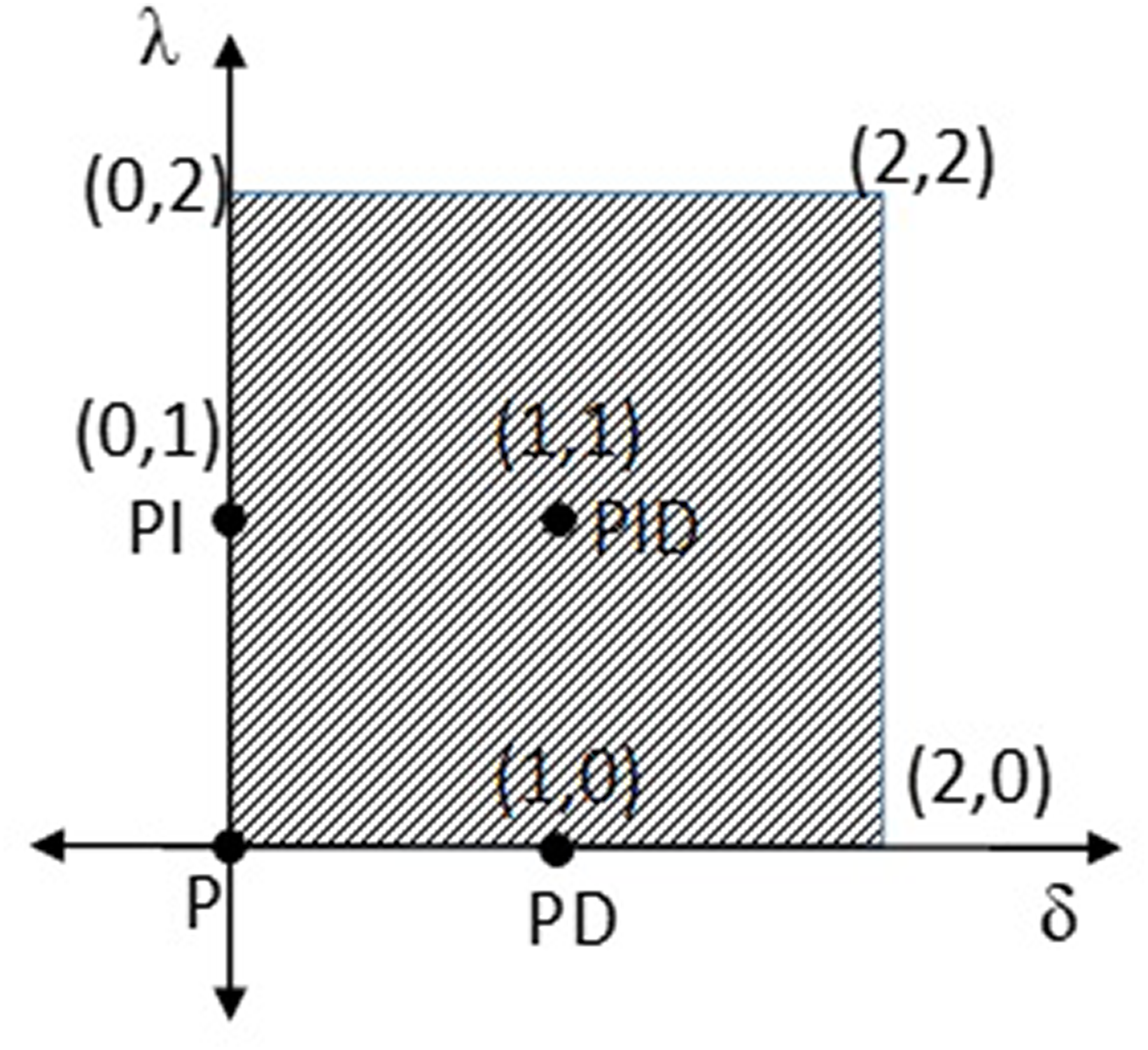

One of the approximations methods that are used is called Oustaloup Approximation, and it is given by.
41

The approximation technique is used in the frequency range [



The case Stability region of the FOPID controller.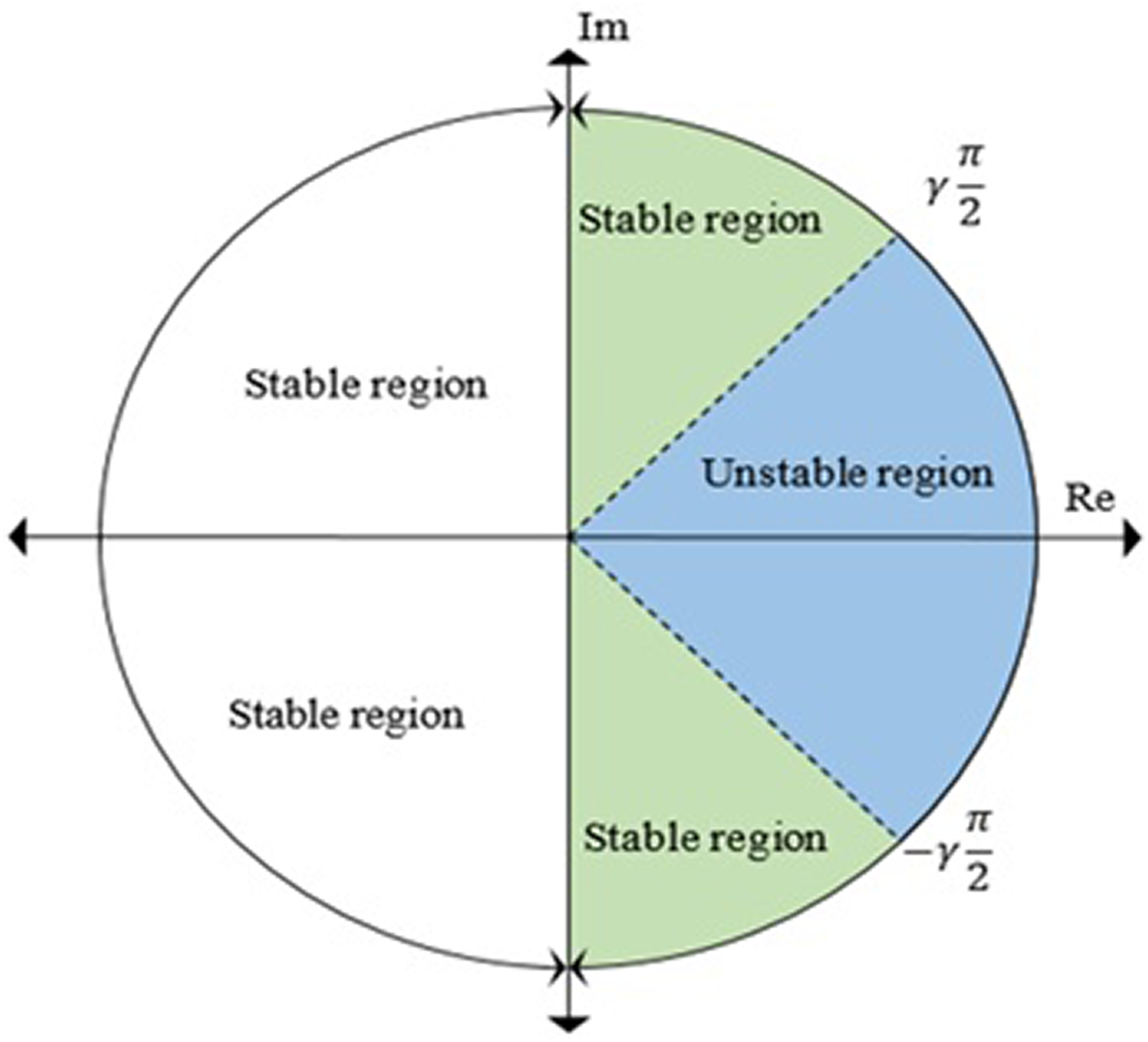
Kinematic modelling of non-holonomic differential drive mobile robot
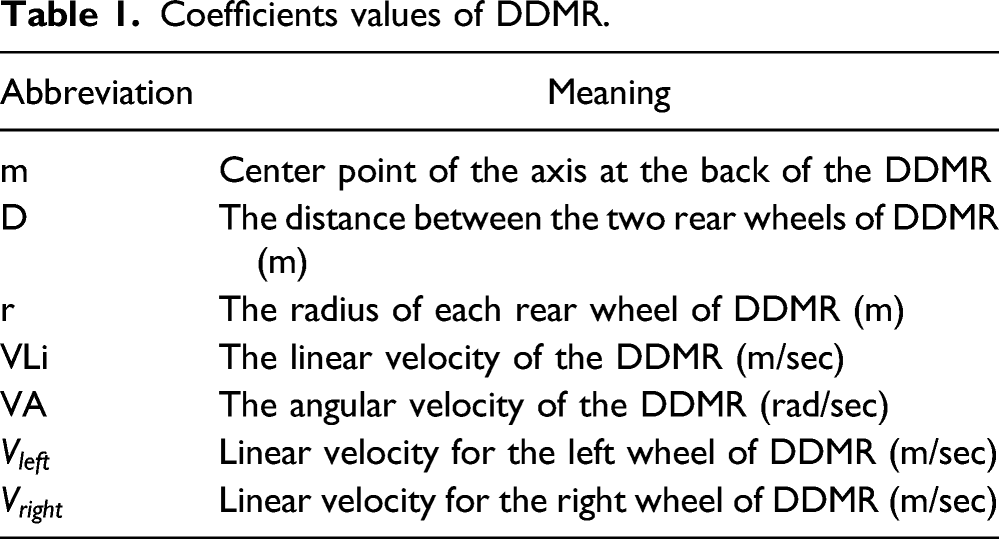
The situation of the differential drive mobile robot in the global coordinate-axis {o, x, y} is shown in Figure 3. The modeling of the DDMR as displayed in Figure 3 comprises two driving wheels mounted on the hub situated at the rear of the truck and a castor wheel at the top of the truck. The movement and the direction of DDMR are accomplished through two DC motors which form the left and right wheel actuators. Table 1 tabulates the values of the coefficients that are utilized in the calculations of the DDMR kinematic modeling. Demonstration of a differential drive mobile robot in the world coordinate frame. Coefficients values of DDMR.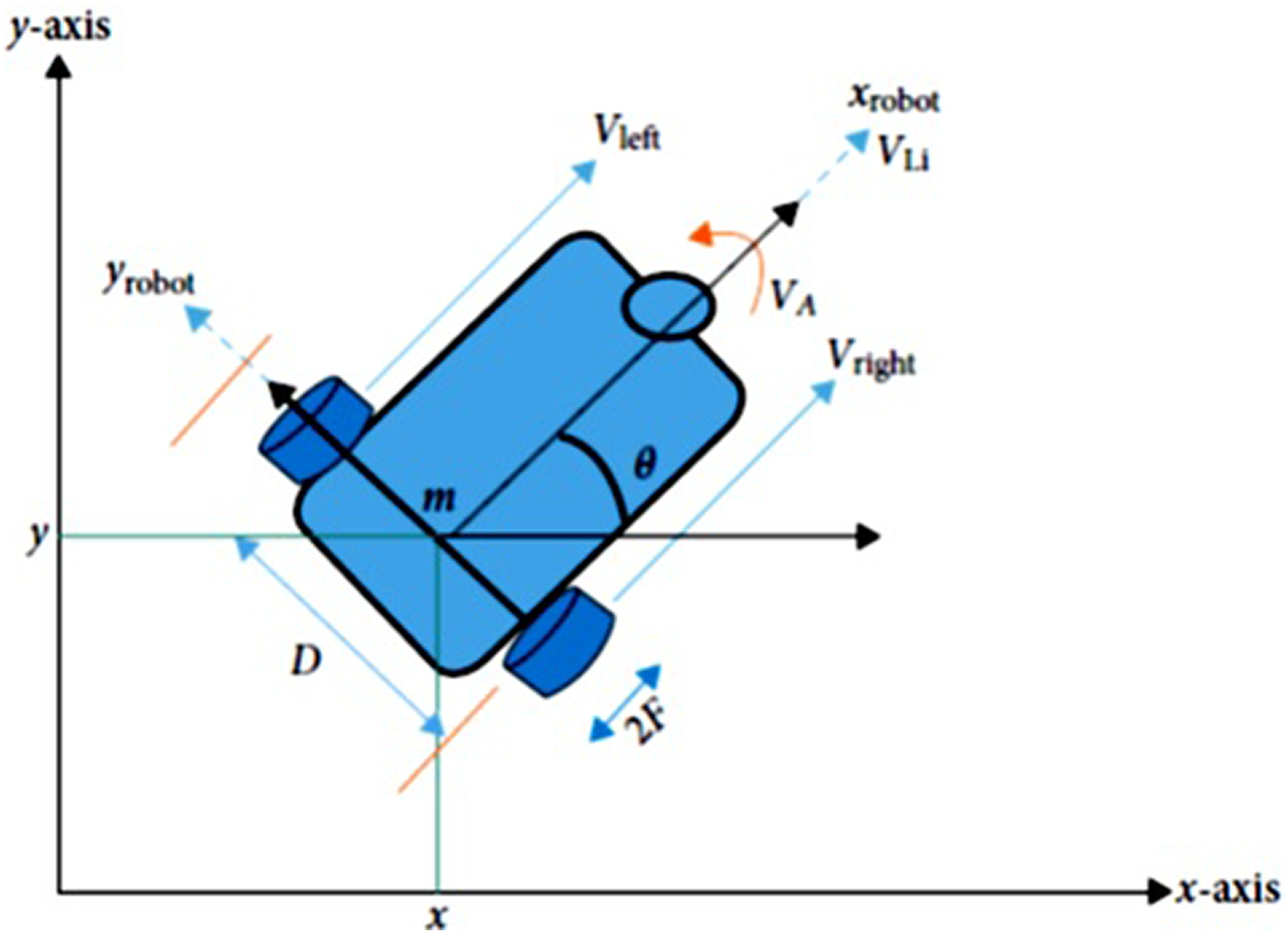
The linear velocities of the two wheels Vleft and Vright constitute the DDMR motion. The DDMR linear and angular velocities 

A differential drive DDMR is sensitive to any change in the relative velocities of the two wheels. Any small variance between these velocities leads to various trajectories. The DDMR kinematic equations in the global coordinate axis are written as follows43,45


Integrating equations (13)–(15) and substituting equations (11) and (12) to get44–46





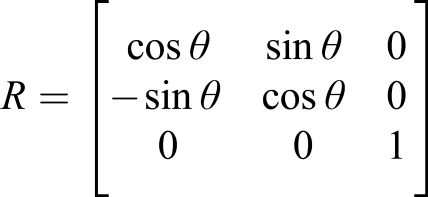
The configuration error for both NNPID and NNFOPID can be obtained by the rotation matrix
Swarm-based NNFOPID controller for trajectory tracking of DDMR
NNFOPID Controller structure
The two mains targets of DDMR movement control are to build up a controller which keeps the differential drive mobile robot from floating out of the reference trajectory and retains its motion easily with a minimum MSE. The offered scheme in this paper comprises two primary parts; firstly, the NNFOPID trajectory kinematic feedback controller. The modified tuning optimization algorithm based on the EFFO technique, which is used to optimize the coefficients of the nonlinear NNFOPID motion control law for the DDMR constitutes the second part. Figure 4 exemplifies the configuration of the kinematics control law for the DDMR using a nonlinear NNFOPID controller. The kinematic controller for the differential drive mobile robot using nonlinear NNFOPID controller.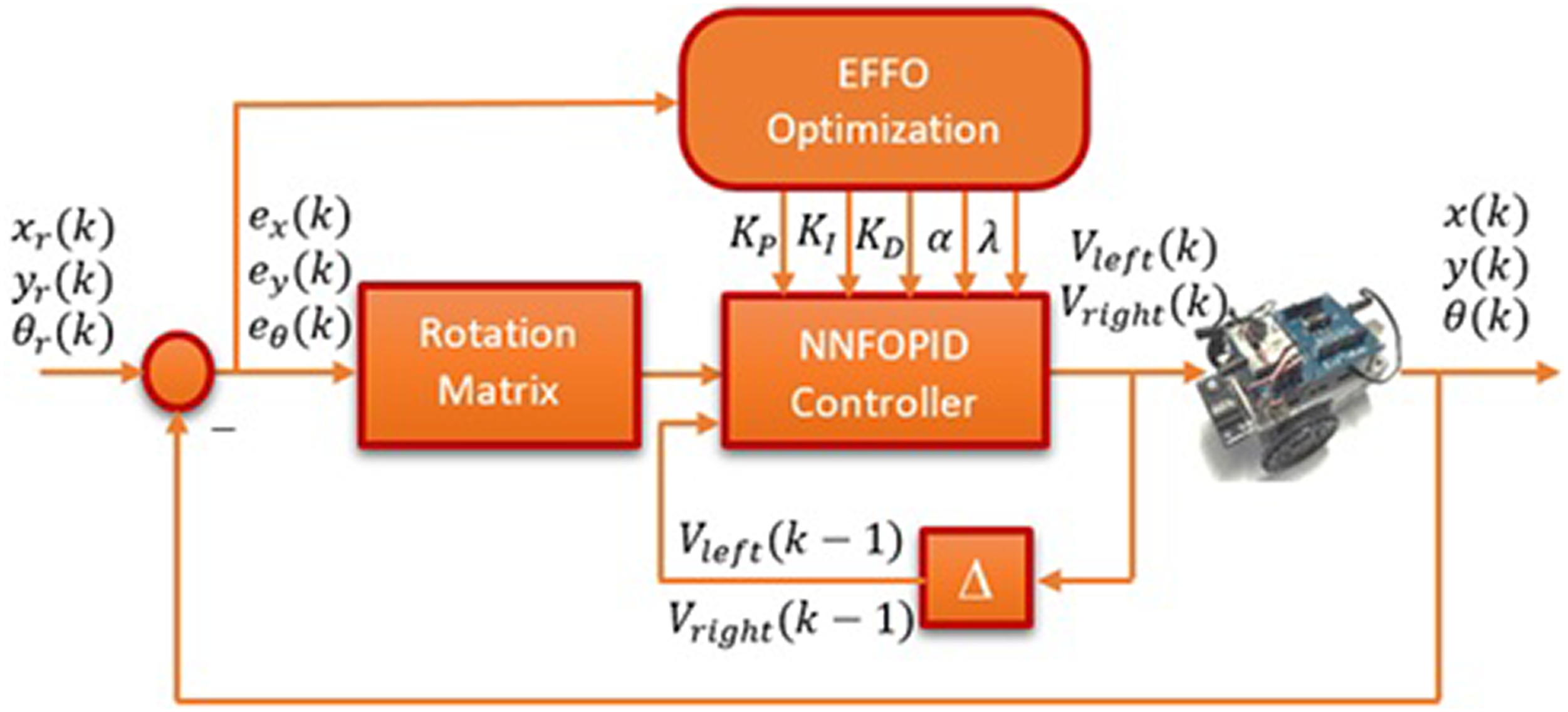
In this work the proposed motion controller for the DDMR is the NNFOPID controller, arithmetically they are represented by the following equations Suggested scheme of NNFOPID control law for DDMR.





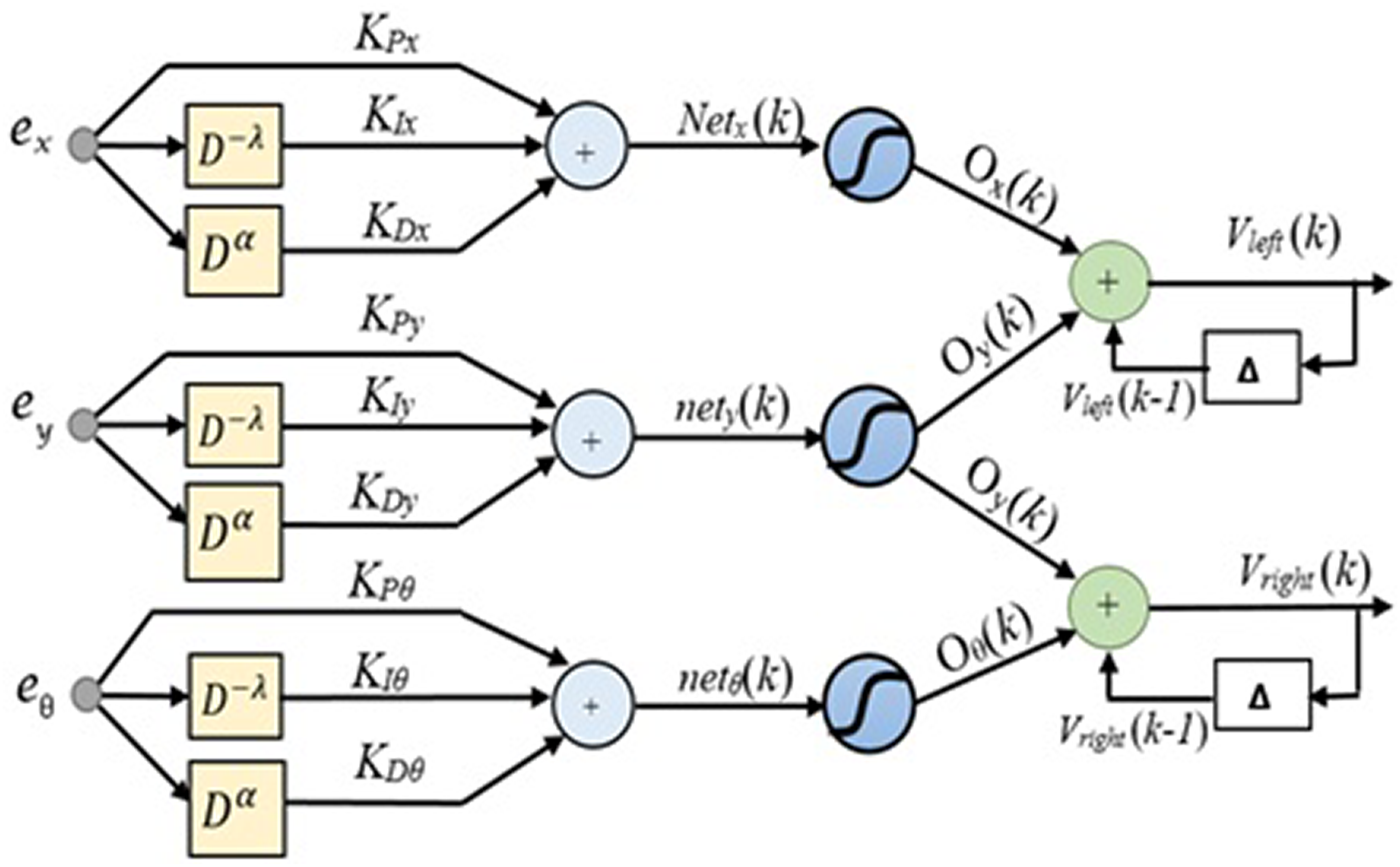
The fractional derivatives in Figure 5 are converted into a scaled sum of the past and current terms of
Swarm based tuning optimization algorithms
These are the metaheuristic procedures which have been invented in last decade and are evolving as common procedures for solving of numerical optimization and intricate industrial case studies most of them only require function evaluation (and not the integral or derivative values).
Enhanced fruit fly optimization algorithm
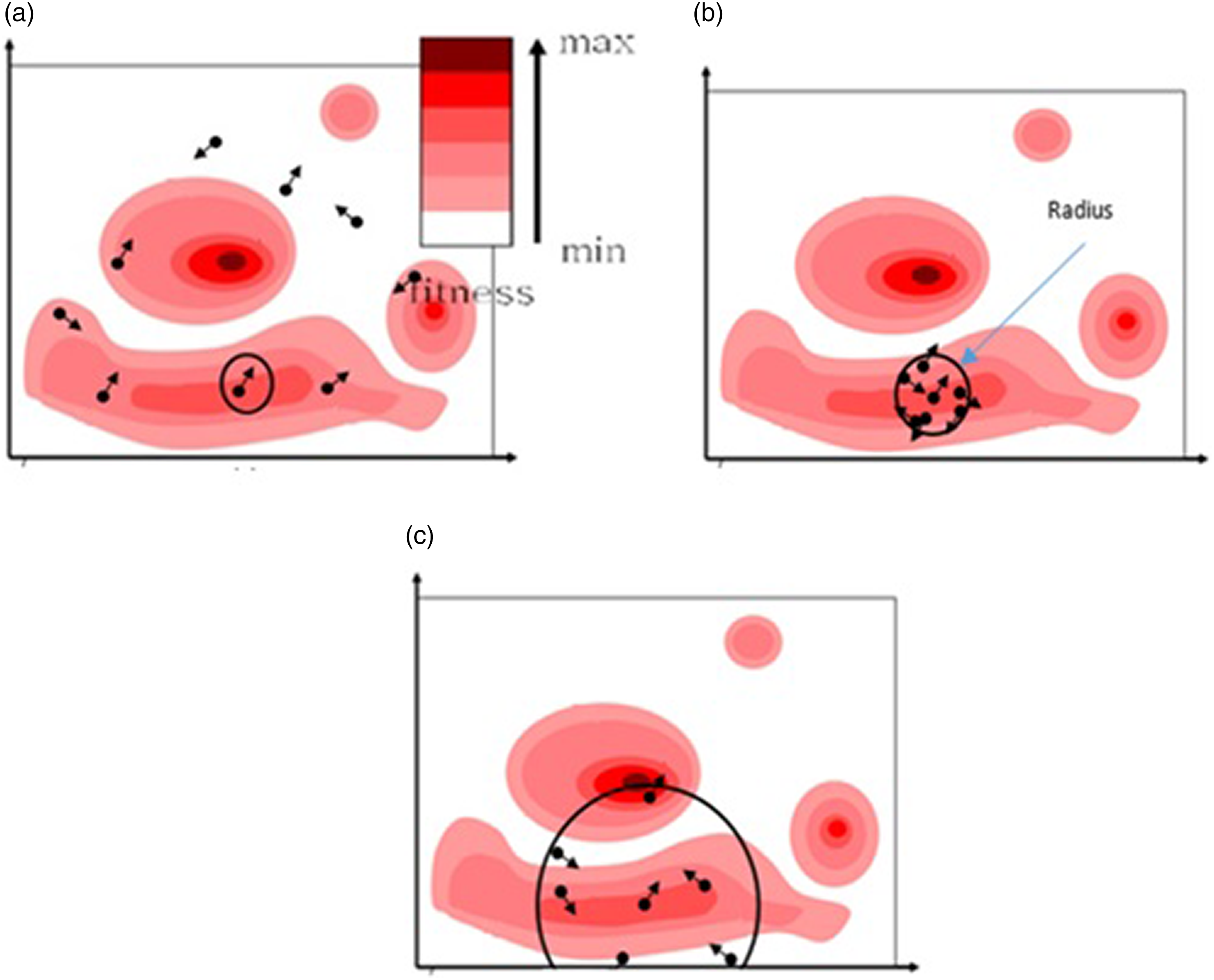
The.process of finding food by fruit fly can be explained as follows: firstly, fruit flies smell the food.source by the organ of osphresis and then flies towards food location. When it becomes close to the location of food, it uses the sense of vision to find food and another flies flock location. Finally., it flies towards the food direction.47,48 The standard FFO has been explained in details in the literature.47–49 and some improvements and enhancements have been added to it in this work as follows, a) Assign a range of values as an upper and lower limits for the initialization of swarm location for the decision variables. b) A dynamic change of the search radius with some iteration has been proposed for the standard FFO algorithm to improve its performance and exclude the drawbacks of the fixed value searching radius (see Figure 6). The modification to the standard FFO algorithm has been done as follows. Enhanced FFO (EFFO) algorithm enhancement (a) Initial FFO, (b) conventional FFO, and (c) Enhanced FFO.

It should be noted that the best particles are the ones that have the minimum of the following fitness function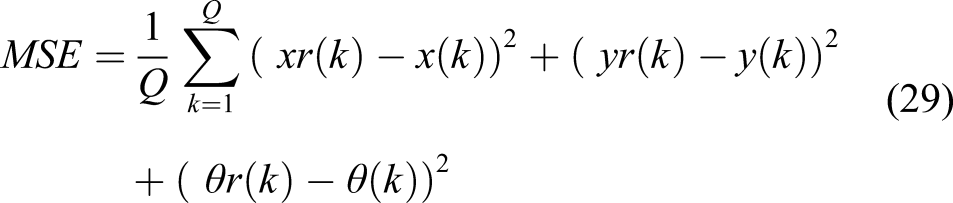
Simulation results and discussion
a. Simulations considerations
several experiments have been accomplished using the proposed EFFO algorithm-based NNFOPID controller. Most of these tests are built on the parameter values of the Eddie DDMR model, which are taken from
50
: D = 0.452 m, r = 0.076 m and the sampling time is equal to 0.5 s. The parameter values of the proposed optimization algorithms with the proposed nonlinear controllers are applied in three simulation case studies as described in the following subsections.
b. EFFO Algorithm coefficients values
The simulation parameters are the maximum generation size, N = 25 gen,
c. Simulation results
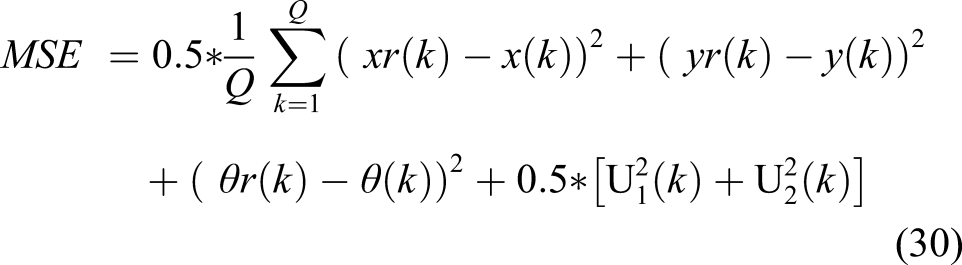
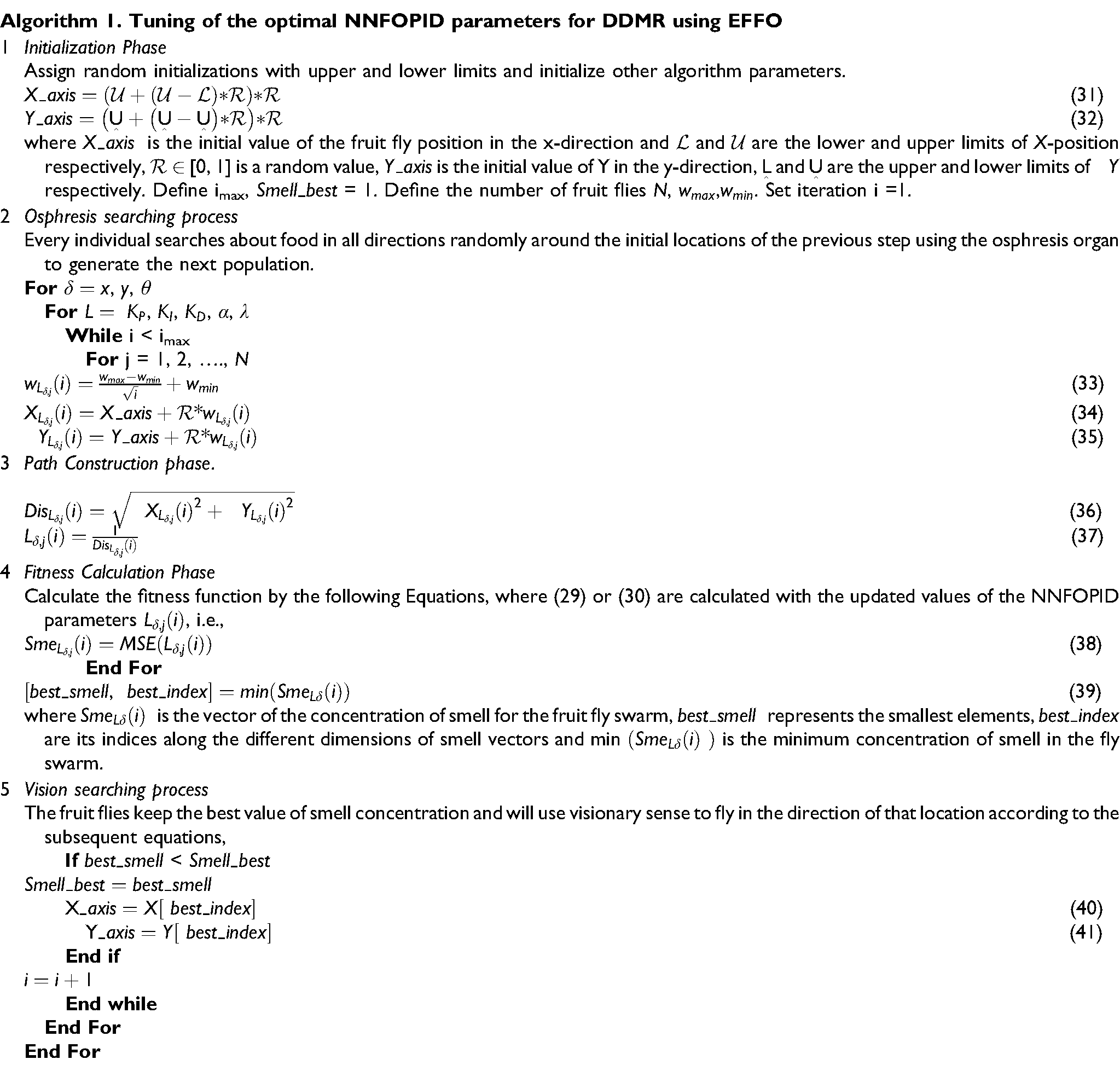
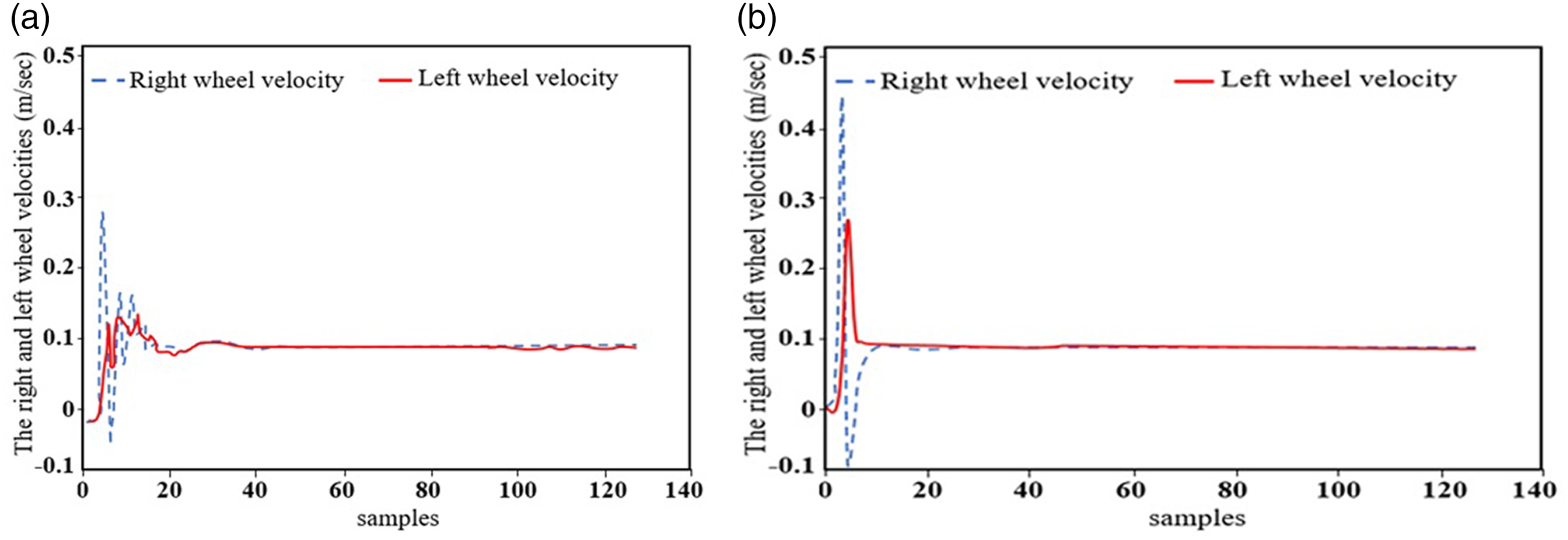
1. Case study 1: (Orbicular-trajectory) The required Orbicular -trajectory can be characterized by the following equations The DDMR begins from the original position (position/orientation) While the real DDMR original position (position/orientation) is The DDMR orbicular trajectory tracking simulation is graphed in Figure 7. The simulation results clarified the efficiency of the suggested NNFOPID control law based on EFFO by showing its capability to produce bounded smooth values of the right and left wheel velocities excluding unexpected upswings as compared to the NNPID, this is verified in Figure 8. Figure 9 designates the approaching of the MSE of the DDMR position and orientation ( Figure 10 demonstrates the mean linear velocity of (0.1 m/s) and the peak of the angular velocity of (0.284 rad/s) for the DDMR by using NNFOPID. The mean linear velocity is (0.1 m/s) and the peak of the angular velocity is (0.536 rad/s) for the DDMR by using NNPID control law. Figure 11 plots the desired and actual orientation of DDMR by using both controllers. Again, the adoption of the MSE + U12 + U22 performance index yields a smooth and bounded control action to avoid actuator saturation and saves energy as indicated by Figure 12. The figure validates the velocity of the left and right wheels of DDMR with orbicular trajectory. The maximum velocity of the left and right wheel are (0.1787 m/sec and 0.1941 m/sec) and (0.07741 m/sec and 0.1246 m/sec) using the NNPID and NNFOPID controllers, respectively. It is obvious that adding the term U12 + U22 to the performance index decreases the control action velocity and gives soft limited control actions.


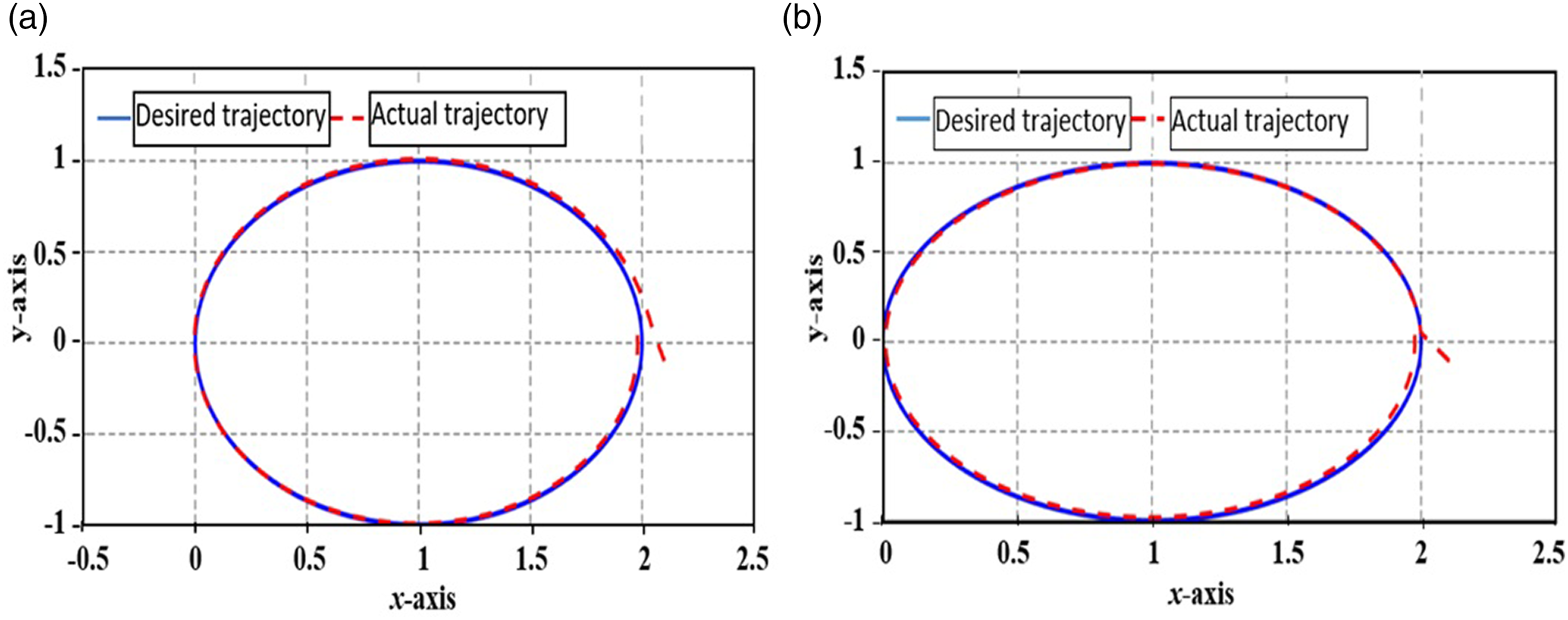
Differential drive mobile robot actual and desired circular trajectories using NNPID and NNFOPID controllers.
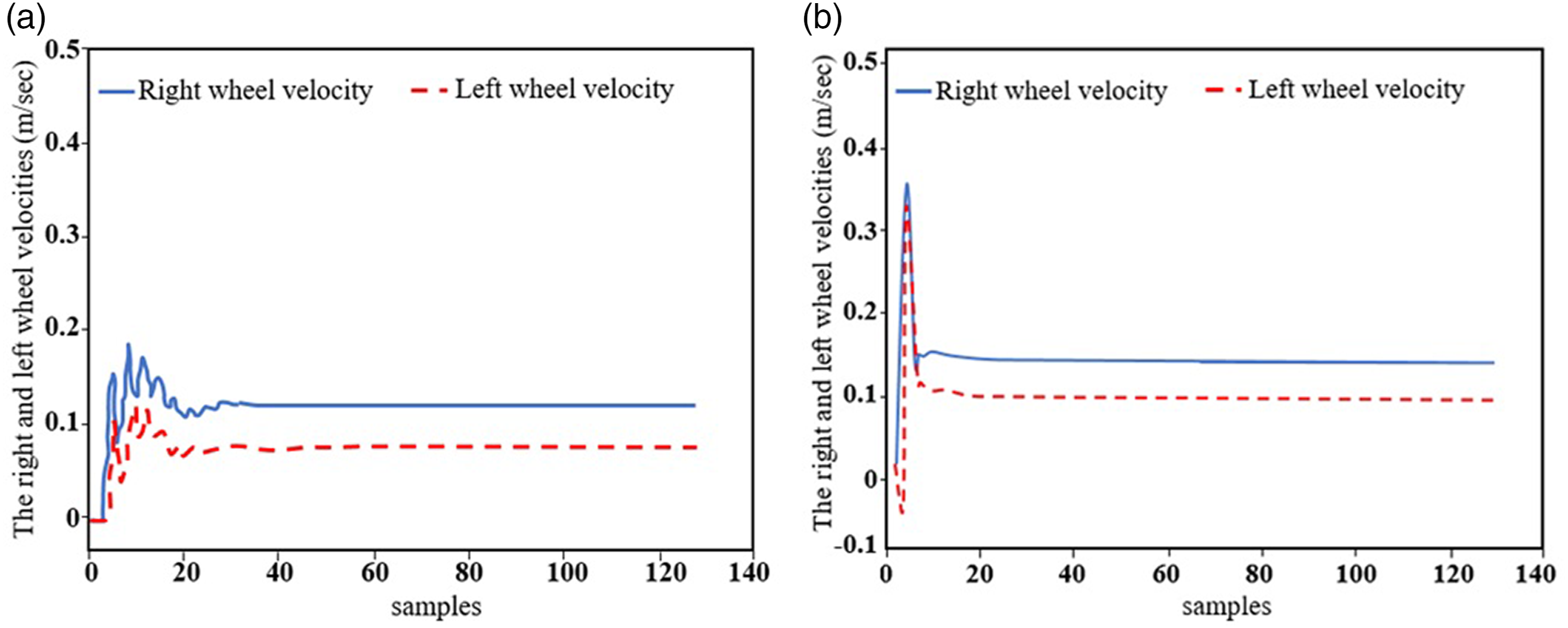
Differential drive mobile robot right and left wheel velocities using NNPID and NNFOPID for orbicular trajectory tracking.
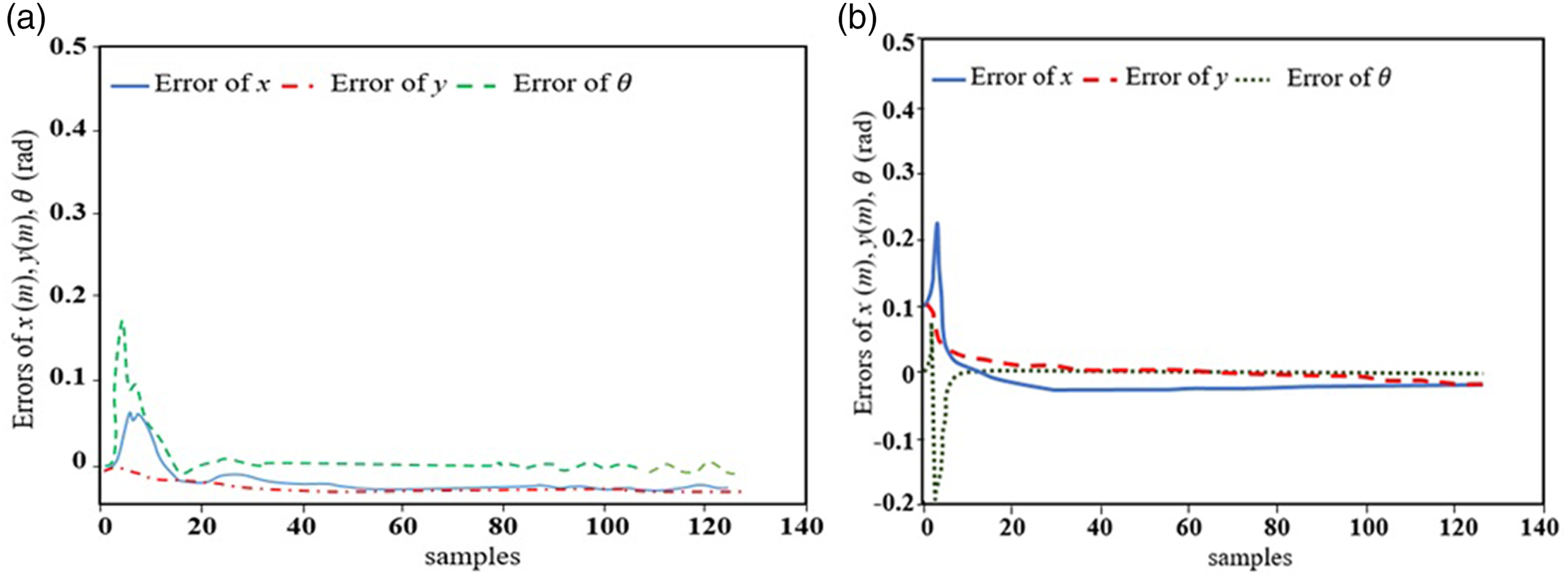
The MSE values in x and y coordinates and orientation θ with a circular track.
The linear and angular velocity of DDMR by using NNFOPID and NNPID.
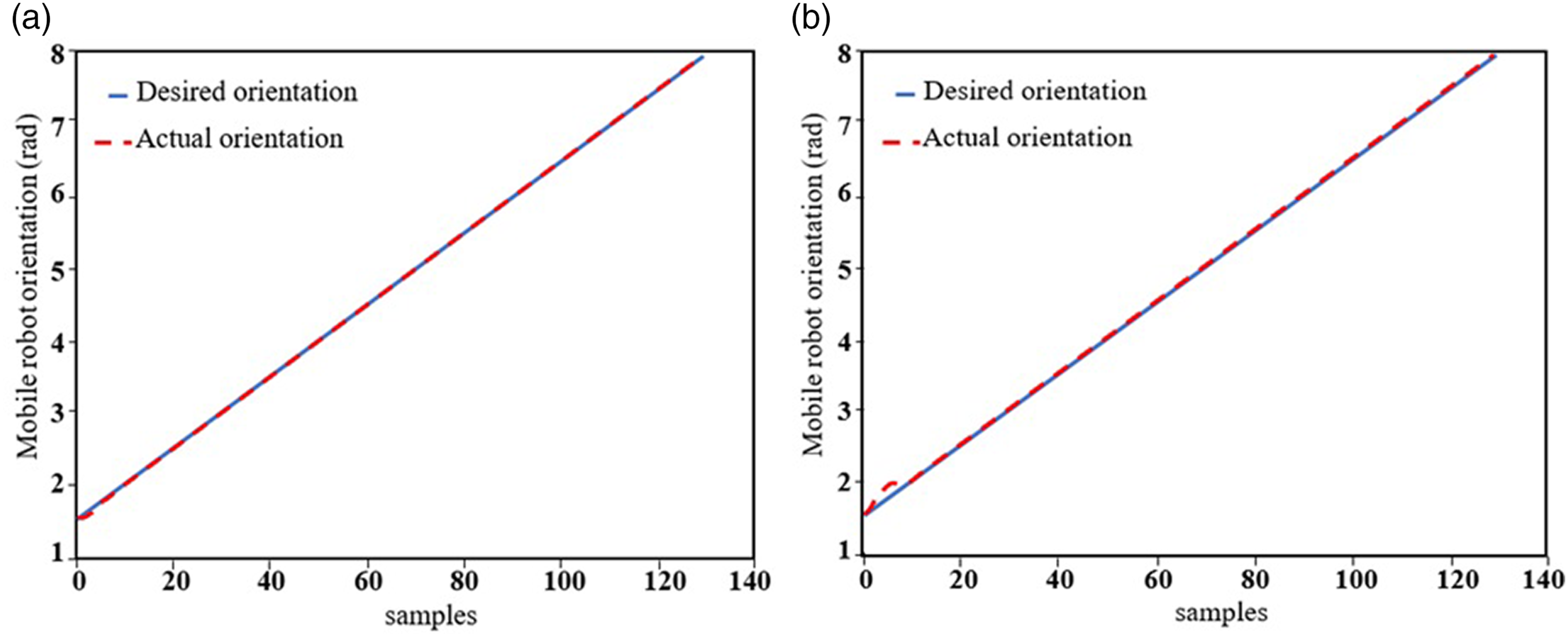
The orientation of DDMR by using NNFOPID and NNPID controllers for orbicular trajectory tracking.
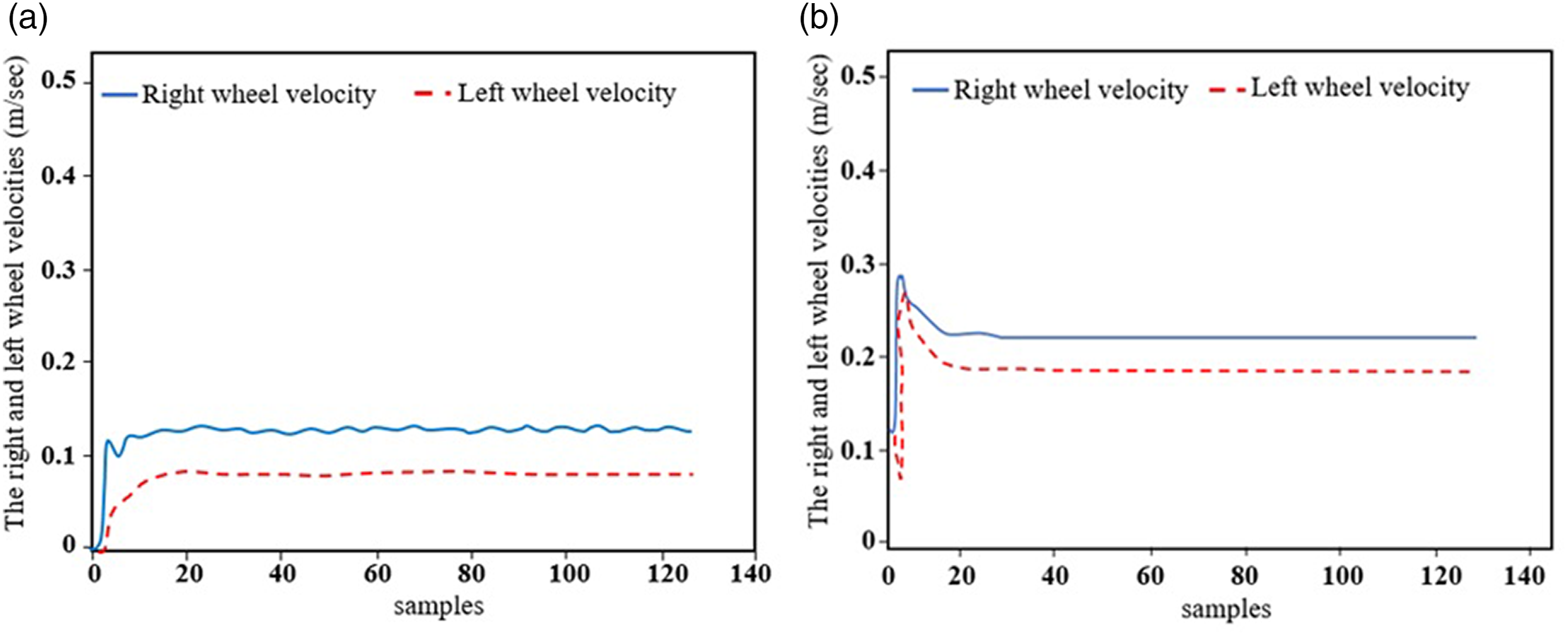
The right and left wheel velocities of DDMR with NNFOPID and NNPID controllers adopting MSE + U12 + U22 performance index.
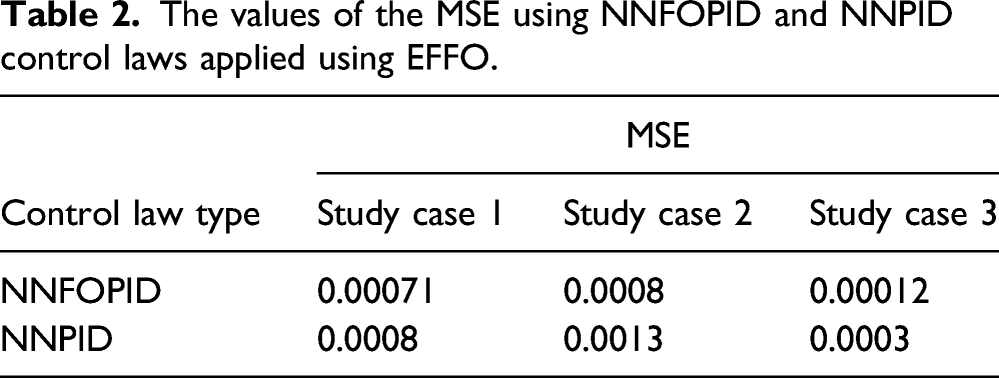
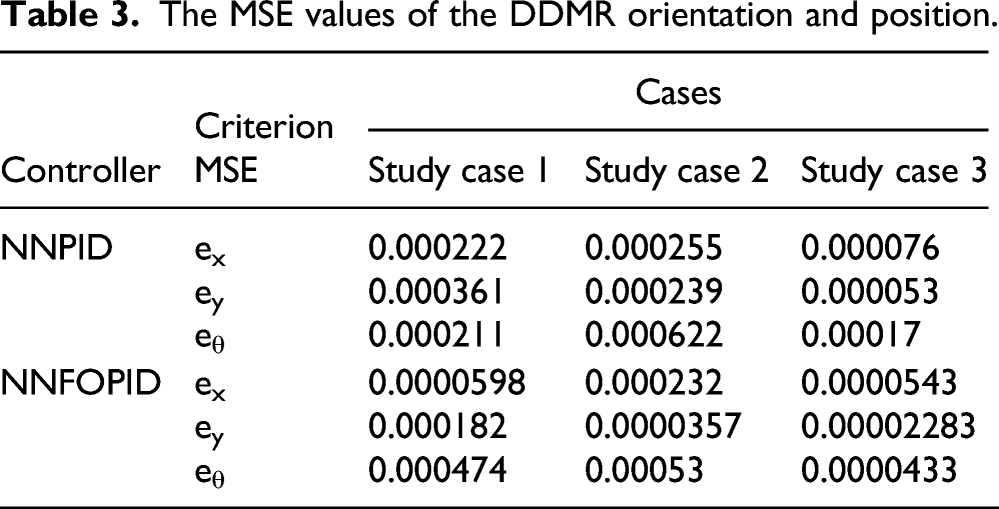
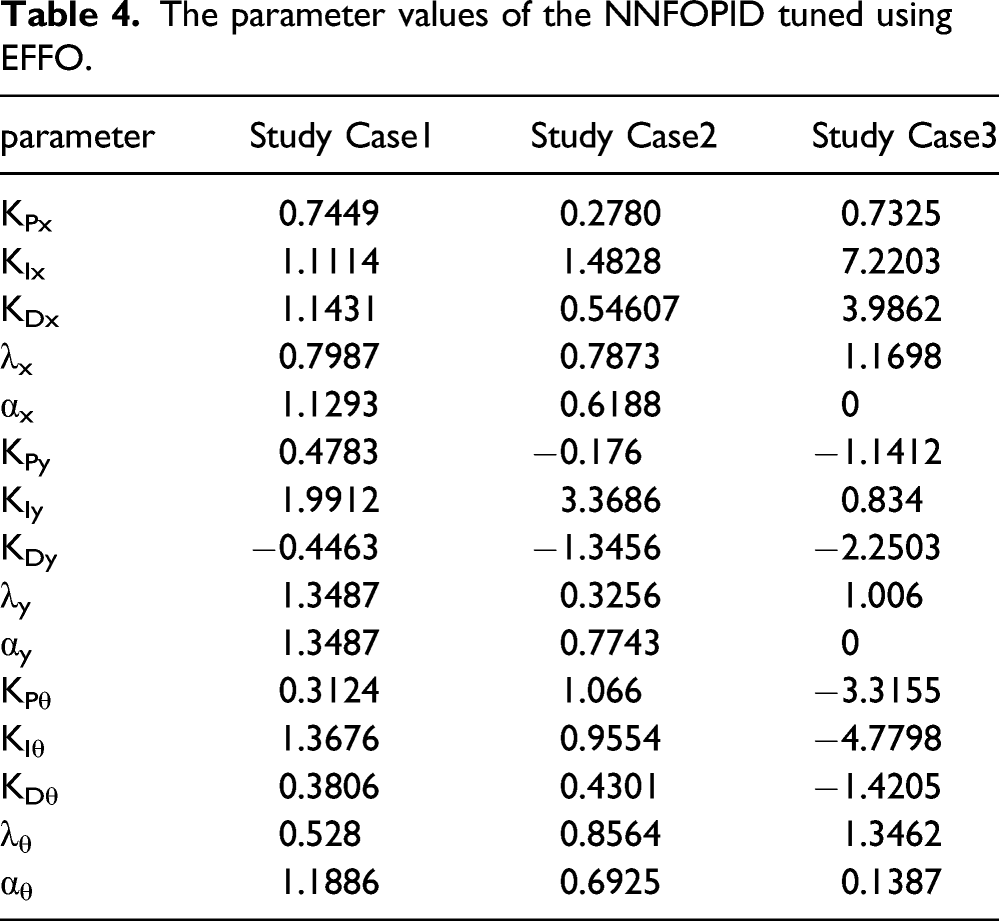
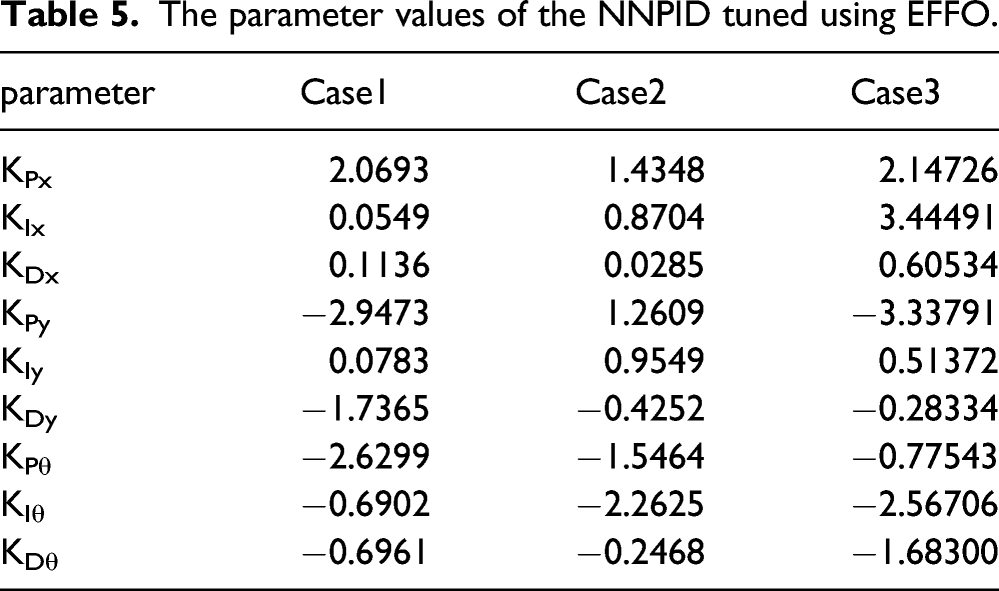
2. Case Study 3: (Lemniscates-Trajectory) The required lemniscates trajectories are described mathematically as The DDMR begins from the original position (position/orientation) While the DDMR real original position (position/orientation) is Figure 13 shows simulation lemniscates trajectory tracking of the DDMR by the proposed NNFOPID and NNPID controllers based on the EFFO ALGORITHM algorithm. The simulation results explain the efficiency of the suggested EFFO technique-based NNFOPID as compared to NNPID one by demonstrating the efficiency of the proposed NNFOPID controllers to produce a smooth track that follows exactly the desired path. In addition to presenting bounded smooth values of the left and right wheels, control action velocities are compared to the NNPID controller. This is illustrated in Figure 143. Again the negative velocities are due to the symmetry of the desired path about the x-axis and y-axis where the robot is going to reverse its direction at some point in time. Figure 15 displays the motion MSEs ( Figure 17 depicts the DDMR actual and desired orientation using both the NNPID and NNFOPID controllers for lemniscates trajectory tracking. Table 2 summarizes the EFFO implemented to compute controllers' parameters after 100 iterations. This table shows that the values of the MSE values using the NNPID controller are larger than the MSE values for the NNFOPID controller. Table 3 lists the values of the MSE of path coordinates (y and x) and error of orientation θ using NNFOPID and NNPID controllers. Table 4 lists the parameter values of the NNFOPID controllers for three study cases, while Table 5 lists the parameter values of the NNPID controller for three study cases.


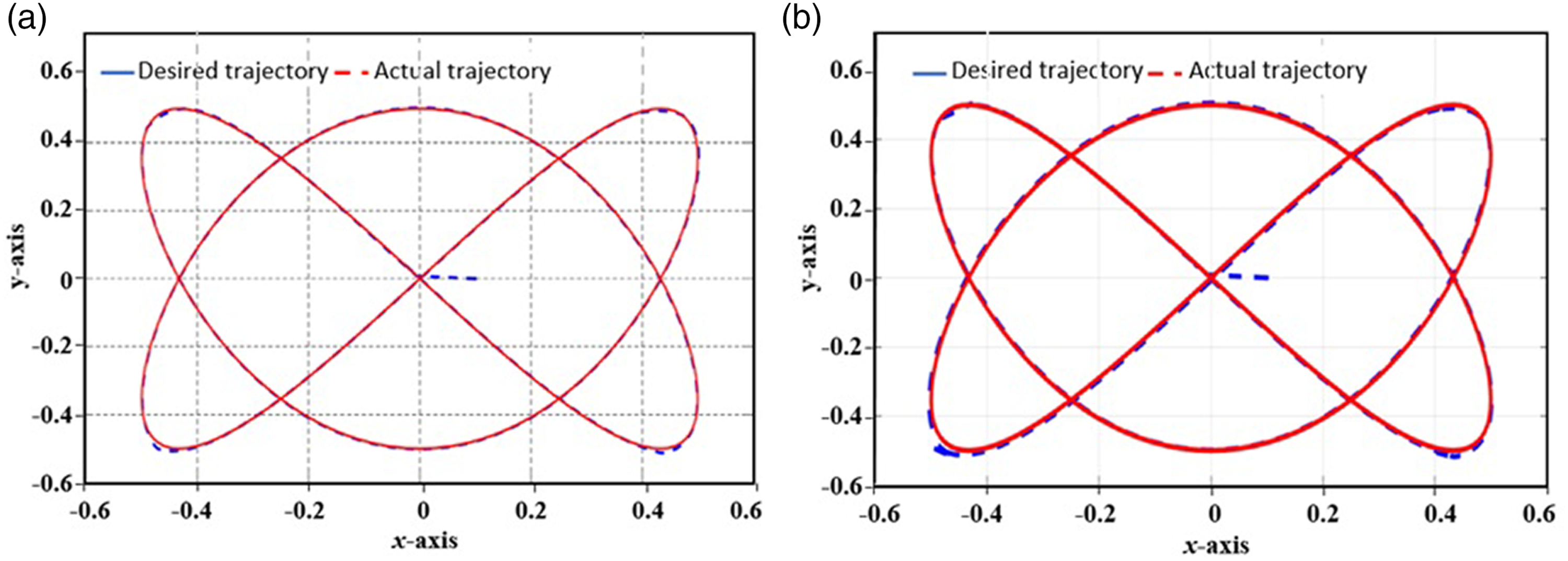
DDMR actual and desired lemniscates trajectories using NNFOPID and NNPID controllers.
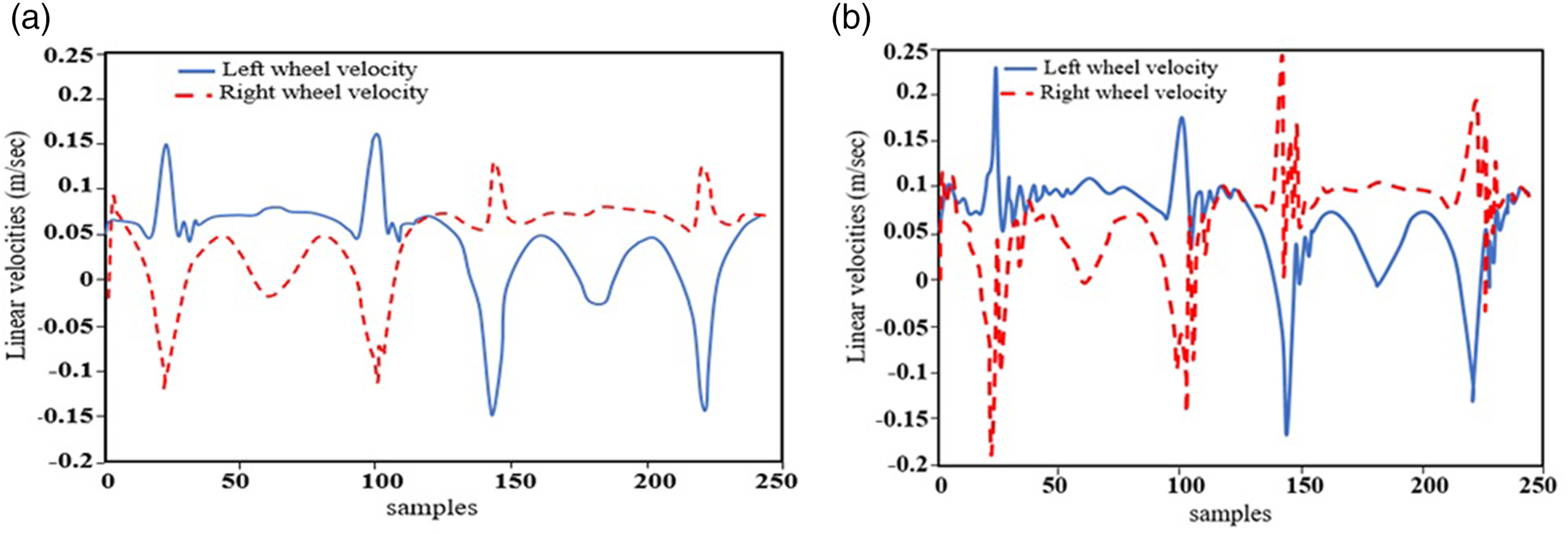
The DDMR right and left wheel velocities using NNPID and NNFOPID for lemniscates trajectory.
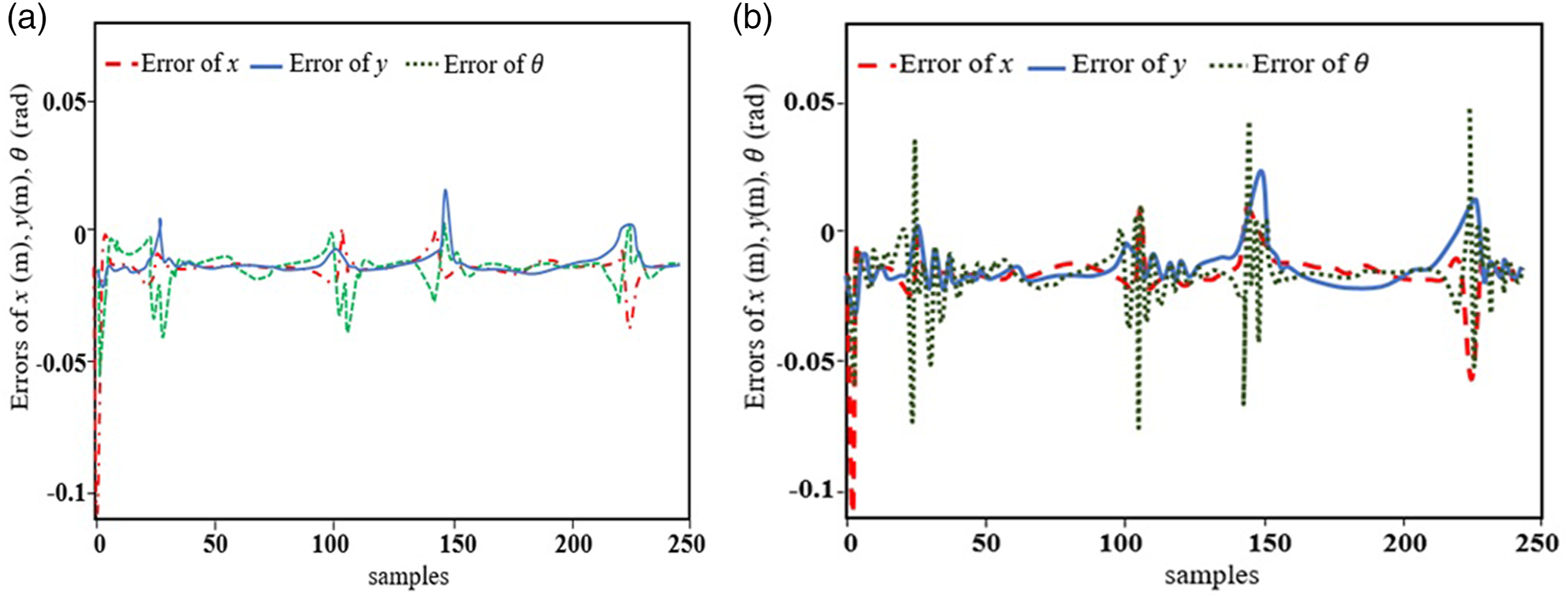
The MSE values of the DDMR orientation θ and its x and y coordinates with lemniscates trajectory.
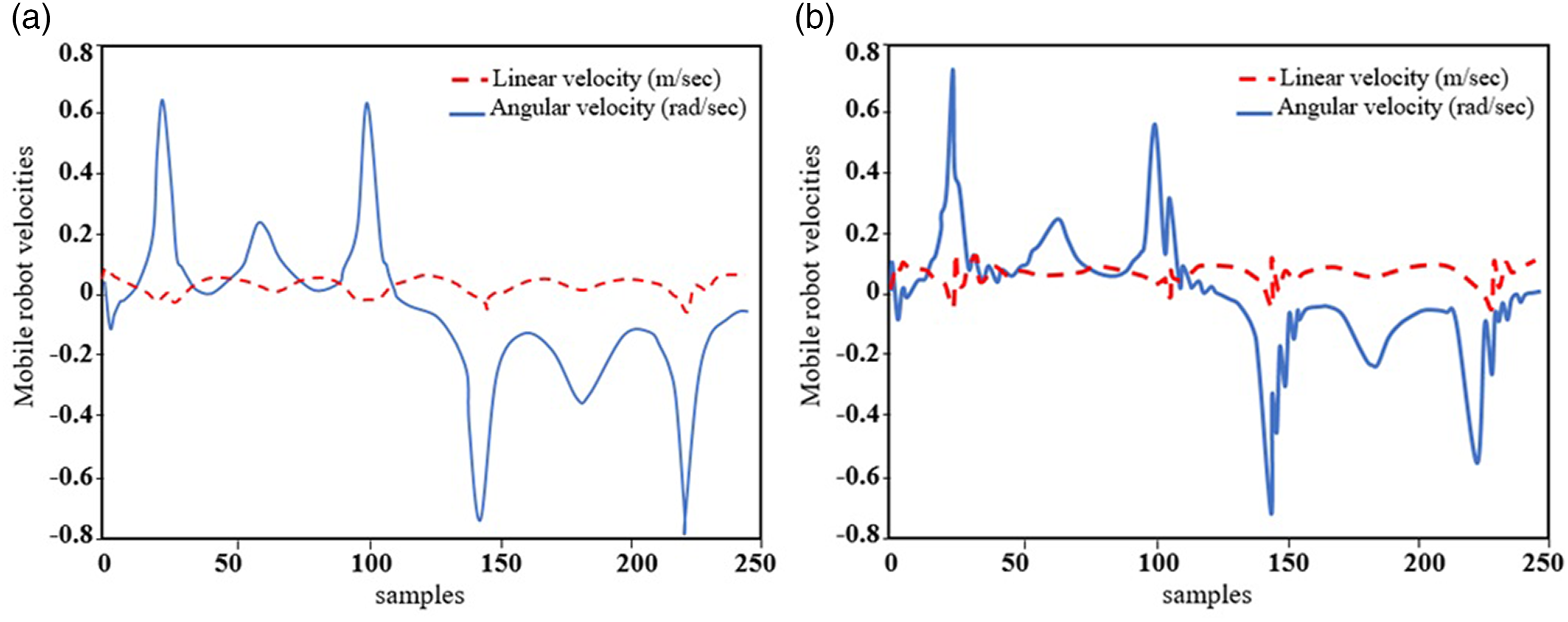
The DDMR angular and linear velocities using NNPID and NNFOPID controllers for lemniscates trajectory tracking.
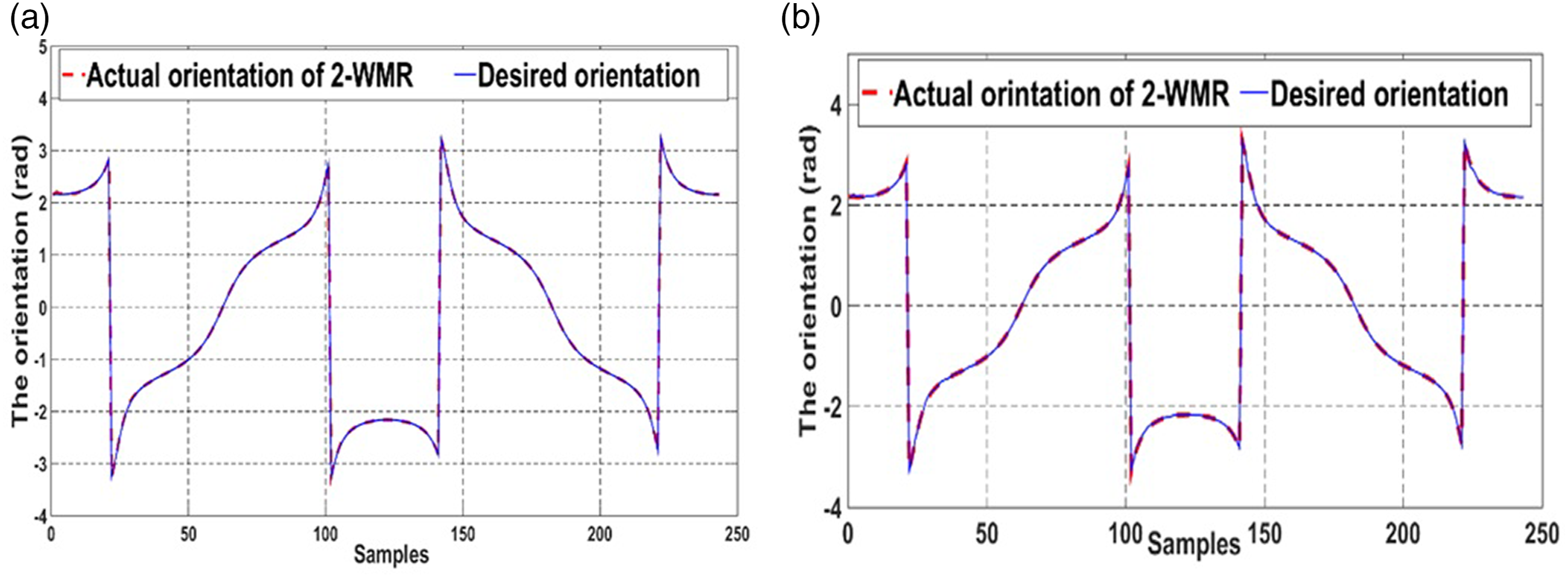
The orientation of DDMR by using NNFOPID and NNPID controllers for lemniscates trajectory tracking.
The orientation of DDMR by using NNFOPID.
The values of the MSE using NNFOPID and NNPID control laws applied using EFFO.
The MSE values of the DDMR orientation and position.
The parameter values of the NNFOPID tuned using EFFO.
The parameter values of the NNPID tuned using EFFO.
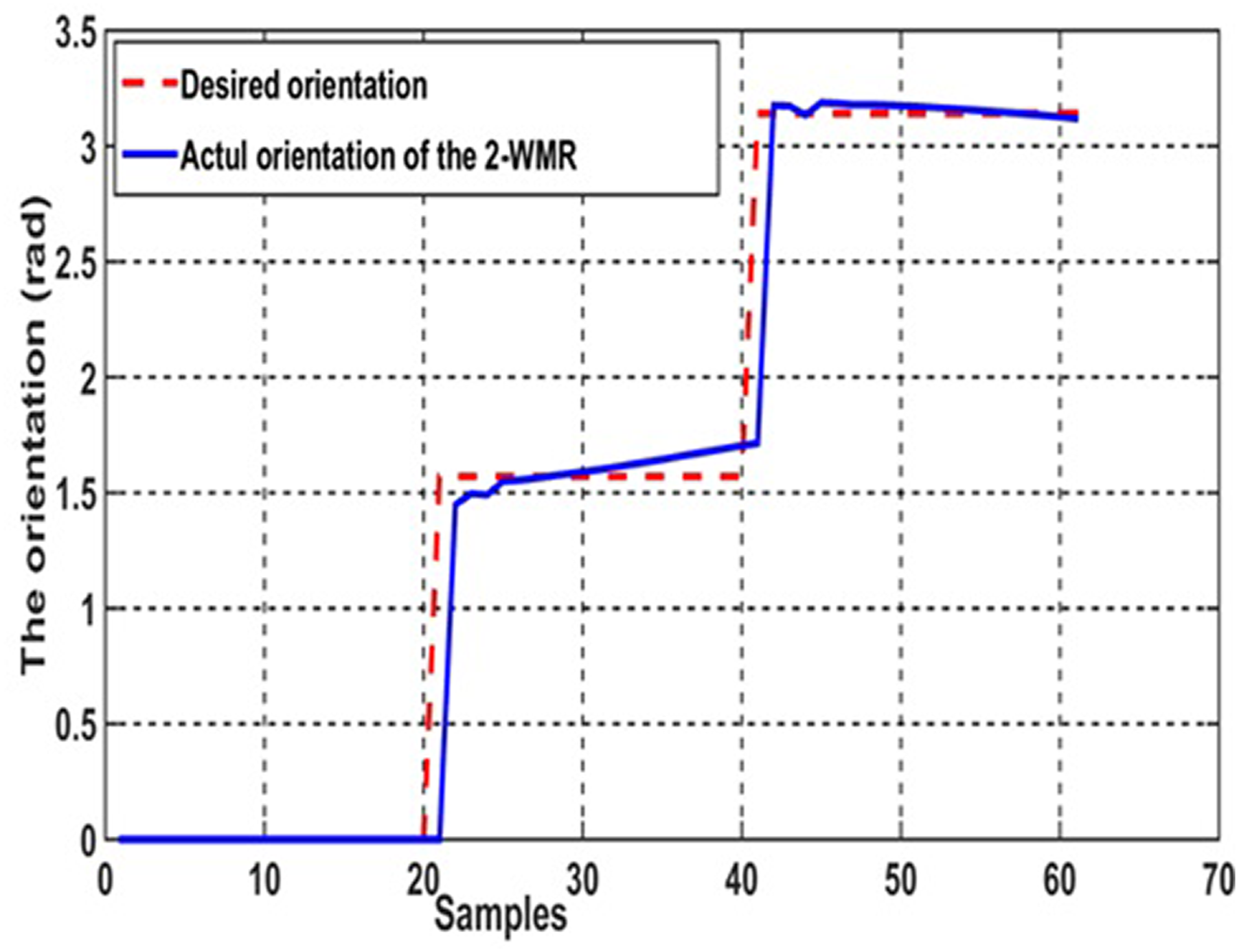
3. Case Study 3 (Spinning Controller) This case study demonstrates the situation of the DDMR behavior when the coordinates position is kept constant and a step-change in the value of orientation P (t)=(0, 0, 0) where P (t)=(0, 0, π/2) where P (t)=(0, 0, π) where The DDMR moves from the original position (position/orientation): P (0) = [0, 0, 0] While the DDMR actual original position (position/orientation) is: Pd (0) = [0, 0, 0] Figure 18 shows the orientation of DDMR which changes suddenly but the position remains fixed. While Figure 19 studies the relationship between the trajectory MSE and the distance between two wheels of DDMR with different values for D.
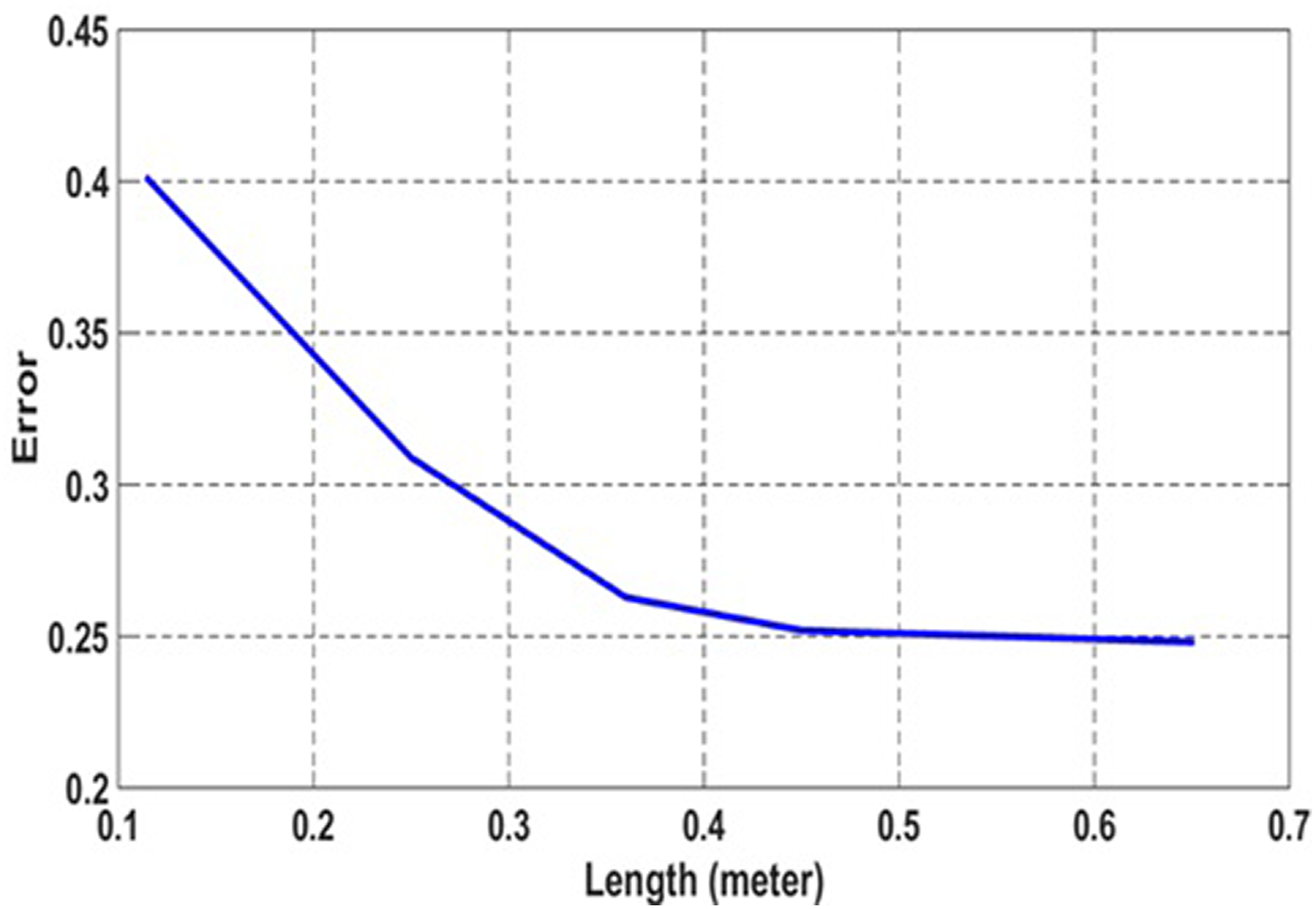
The relation between MSE and D.
d. Comparison with other works
In this section, the previous case studies are compared with other researchers’ work the case study one and two with.
51
From these comparisons, it is obvious that the NNFOPID controller is better than other controllers proposed that are used in
51
as shown from Figure 20. Trajectory-tracking of DDMR of case study 1.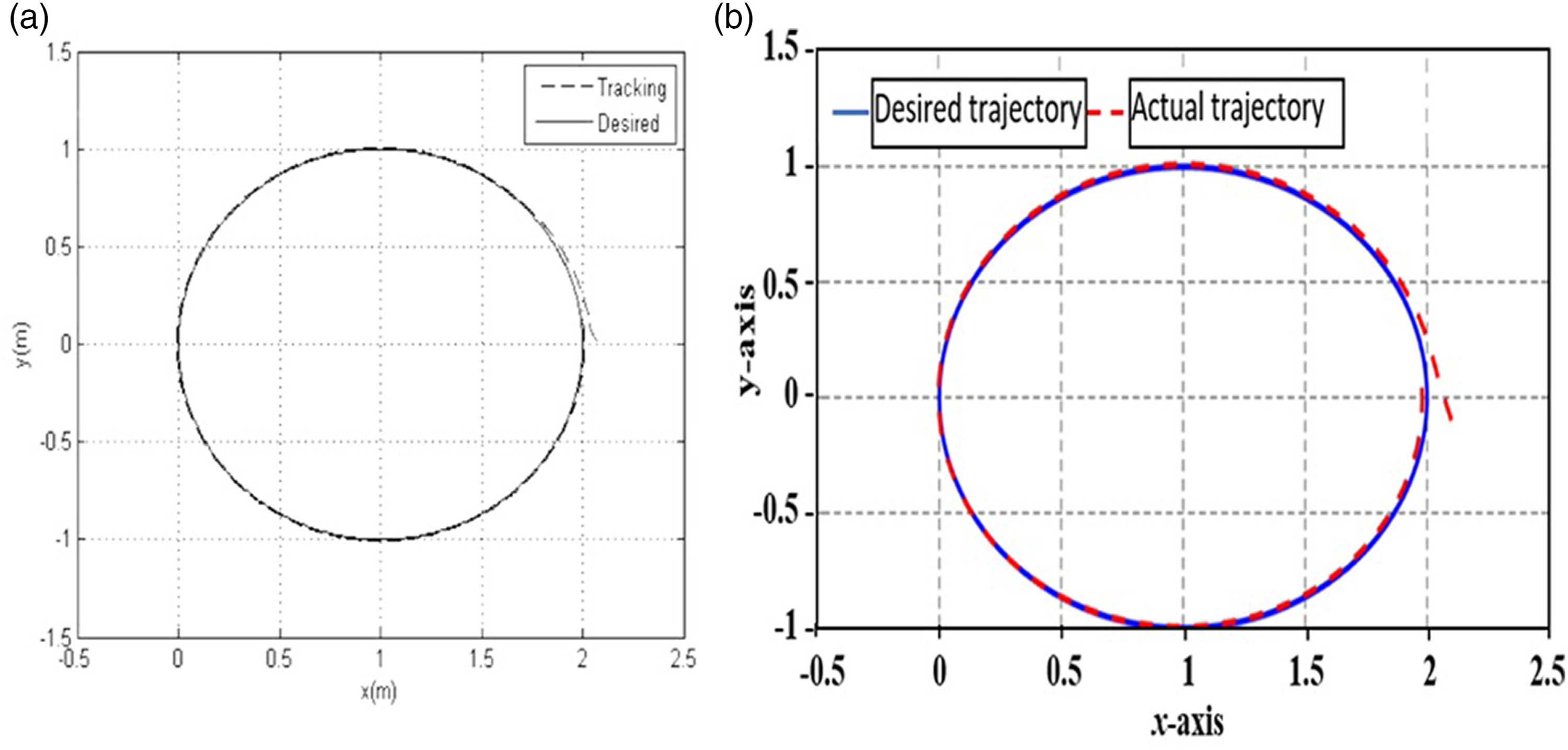
(Finally, a comparison of the third case study with the results given in.
52
From these comparisons, it can be concluded that the NNFOPID controller is better than other controllers proposed in
52
as shown in Figure 21. The mean square error in the third case study is 0.00009 and the MSE obtained by
52
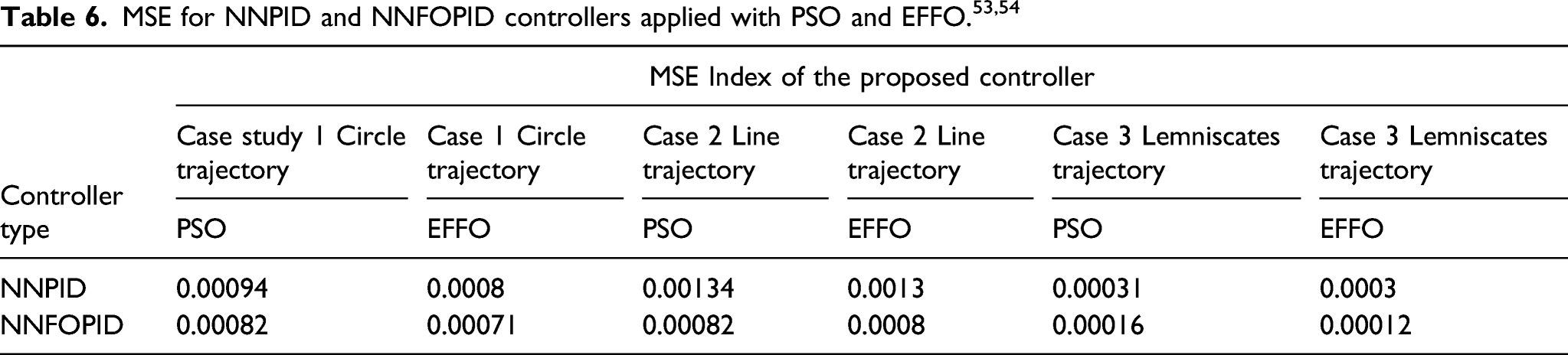
is 1.4868. Finally, comparisons with recent works53,54 (see Table 6) have shown that the proposed NNFOPID controller has excellent performance and better results in terms of MSE. Trajectory tracking of DDMR of case study 3.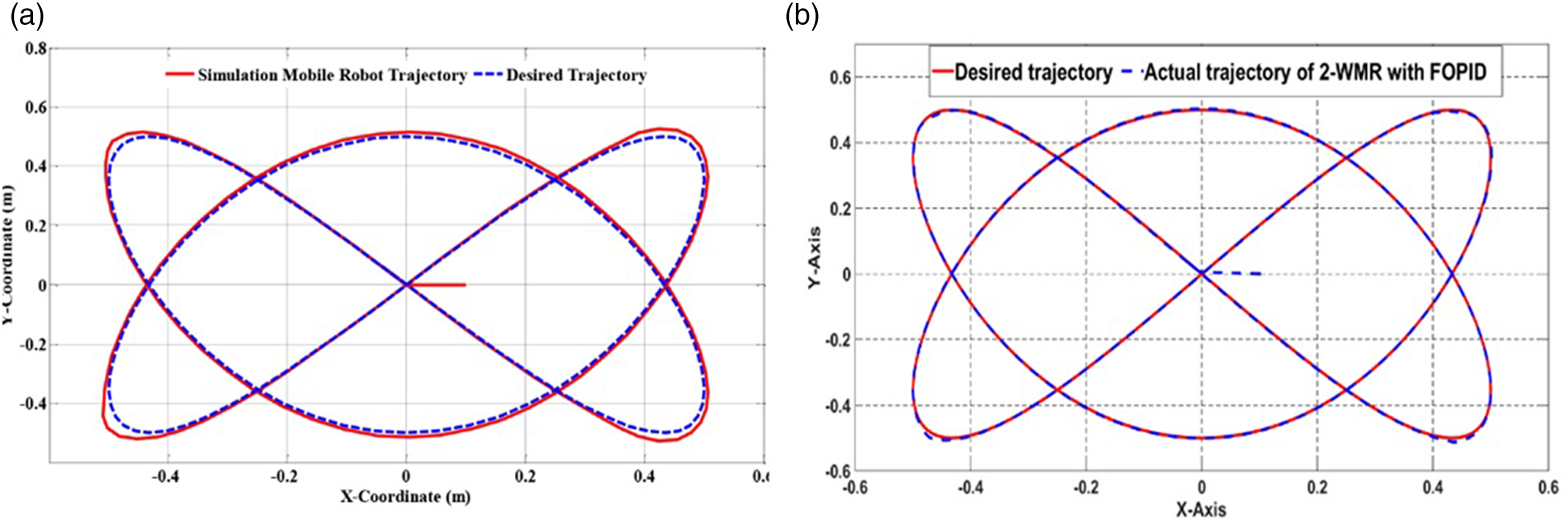
e. Discussions
The aforementioned simulation results and a comparison analysis between the NNPID and NNFOPID showed that the NNFOPID is a perfect trajectory tracking kinematic controller because of its flexibility and capability that stem from the fractional order of the integral and the derivative. The following are the advantages of the NNFOPID controller over the kinematic NNPID one: ❖ Efficient ability reduction for the tracking MSEs for the DDMR model after 100 iterations (MSE is 0.00071 for the circular path; is 0.0008 for line path, and is 0.00012 for lemniscate path) to track a desired continuous pathway. ❖ Competence of breeding soft and perfect proper velocity control actions without sharp upswings (the linear velocity is 0.14 m/s, and the angular velocity is 0.29 rad/s for orbicular path). The linear velocity is 0.18 m/s and the angular velocity is 0 rad/s for line path with a linear velocity of 0.1 m/s and the angular velocity is ❖ The results of the three case studies simulation elucidate the ability of the searching method, i.e. EFFO, to get the best parameters for the NNPID and NNFOPID kinematic controllers despite all the difficult challenges to control the DDMR by three controllers at the same time (one controller for each of x, y, and
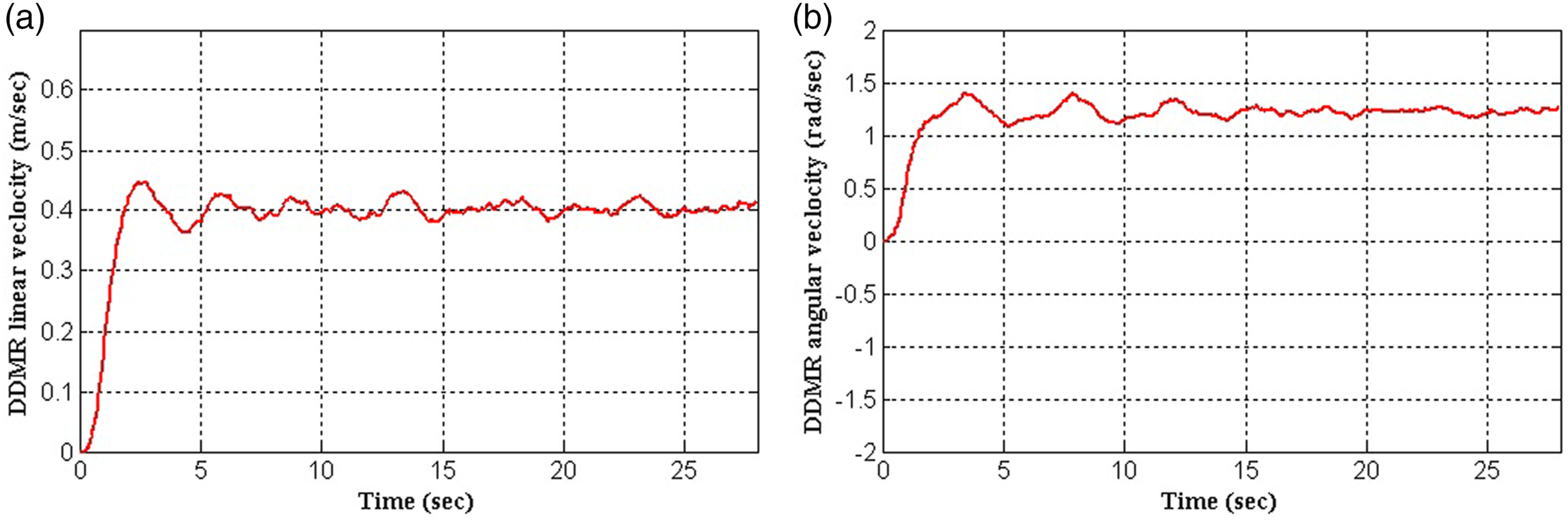
The EFFO algorithm presents higher accuracy to give a minimum MSE as compared to PSO. So, it better tunes the control parameters of the NNPID and the NNFOPID controllers than other algorithms as noticed by the simulation results (see Table 6), where EEFO has been compared with PSO. ❖ For the case of measurement noise in the output signal, a simulation in MATLAB environment has been conducted to test the effectiveness of the proposed EFFO algorithm and the proposed NNFOPID controller. Figure 22 illustrates the result, as can be seen; the proposed controller with its parameters tuned by EFFO algorithm perfectly rejects the measurement noise and the linear and angular velocities are setteled to their desired values with minimum overshoot and small setteling time. The DDMR velocities using NNFOPID controller with measurement noise, (a) linear velocity
Conclusions
This work presented a modified herd-based optimization algorithm, namely the EFFO algorithm, and compared it with PSO. These algorithms are adapted to get the best control coefficients of two proposed nonlinear neural-based control laws (namely, the NNFOPID and NNPID). A thorough investigation and comparisons between these two controllers through experimental simulations on a differential drive mobile robot as a case study revealed that the proposed NNFOPID controller has outstanding performance as compared to the NNPID controller. The simulations elucidate the powerfulness and robustness of the proposed NNFOPID tuned by the EFFO technique, which has fabulous track pursuing realization, and it has the aptitude of generating soft and satisfactory angular and linear velocity. The control signals of the suggested NNFOPID controller are smoother and less in amplitude than that of the NNPID. Finally, as future work, one can think of realizing the proposed NNFOPID controller on real mobile robot platforms with the aid of FPGA or Raspberry PI modules.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Appendix
The Oustaloup approximation for the discrete case can be derived as follows
38
Now, the gain Ku of the resulting discrete-time system at the central frequency
The correct gain at this frequency is given by
Finally, the gain of the system can be found as
Then, The discrete-time system is described by a transfer function of the form