
Abstract
Control of assistive exoskeleton robot recently has to be crucial of development and innovation of medical application. To support daily motions for humans, control application of assistive exoskeleton robot allows for limb movement with increased strength and endurance during patient’s wearable exoskeleton robot application. The interaction between such exoskeleton device and the human body at the connecting joint, especially the knees, is the main interest of this design formation. The assistive device requires to design and to develop into innovation design aspect. This research presents the novel design of an active compliant actuation joint in order to increasing the higher torque of actuation than conventional actuation joint. Control design of the higher torque actuation usually difficult priori to conventional torque control. This will contributed to applying the supervisory control for compliant actuation that verified by experiment method. Then the hybrid Radial Basis Function neural network (RBFNN) and PID were proposed for actuating torque control methods. Experimental results show that the design of supervisory control is get better response, and higher producing torque output than the conventional design. Error of torque control of compliant actuation is not instead of
Keywords
Introduction
The most substantial social transformation in the 21st century is the increase in aging population. Many countries around the world are currently facing a rapid growth in the number of aging citizens. According to World Health Organization (WHO), the number of senior populations aged 60 years or older is expected to increase at least by 3% per year. Combining with a number of people who has already suffers from amyotrophic lateral sclerosis (ALS), osteoporosis, and other handicaps that has inability of their daily motion, will be one of the main problems of human being. People that have problems with movement for his/her daily living life are needed the lower limb orthoses to help movement ability. Lower Limbs is the main interest of orthoses assisting actuating devices for support movement ability. Such actuating devices interacting with environment are concerned with more requirements of design than other regular operations of robots. The accuracy is essential for repeatability and adaptability for application purposes. Robustness and safety issues are also crucial in design process of robot system. Then propose of supervisory control with RBFNN and PID control methods gains a higher torque control performance than conventional control method. The verification would be done by experiment system for the propose control of compliant actuation design for exoskeleton robot application. The higher torque of knee joint is come from the high stiffness of spring, then this is a challenge to design high performance control effort.
The main concept of a passive orthoses assisting actuating devices is to store and generate back the energy that assist the muscles from motional load. The variable stiffness actuators (VSAs) has been proposed to design and implement with passive elastic elements for several years. The equilibrium control stiffness 1 was introduced because of zero generating force at home position of the actuator, illustrated in Figure 1.
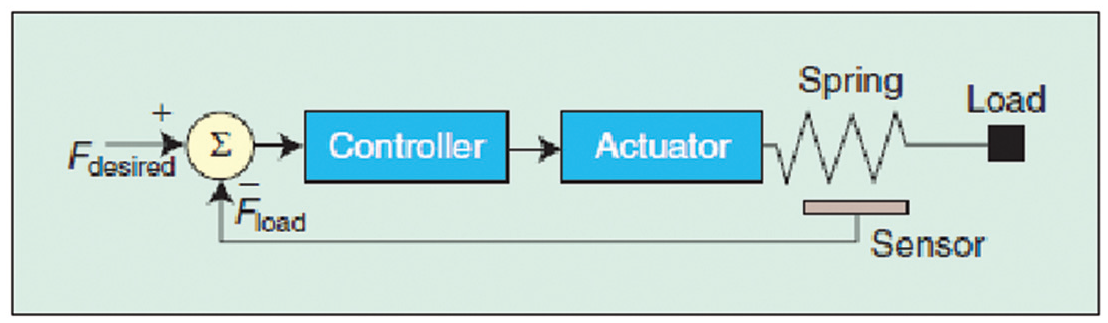
Force control with series elastic spring structure. 1
The VSA or adjustable compliant actuator was characterized by Ham et al. 1 and Wolf et al. 2 in different aspects point of views. The classification of design and component portion was proposed by Wolf et al. 2 The characterized for the design of control algorithms of stiff and soft joint has was also proposed by Calanca et al. 3
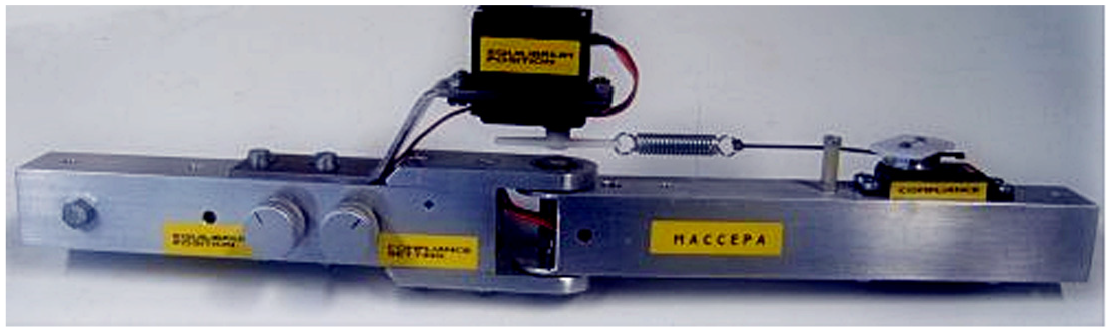
The human robot interaction control of a series elastic actuator was presented by Yu et al. 4 for gait rehabilitation. Their proposed controller with dynamic interacting and disturbance compensating observer was verified by ankle joint of robot. The mechanically adjustable compliance and controllable equilibrium position actuator (MACCEPA), was developed with experiment for biped robot application Ham et al. 5 and Bacek et al. 8 as illustrated in Figure 2.
The extension of the current research has proposed by Bacek et al., 6 the design of torque control of knee joint actuator with the combination of VSA and parallel elasticity actuator (PEA). The results showed high torque gain compared to MACCEPA.
The design of variable stiffness control by back stepping control method was proposed by Petit et al. 7 Position tracking of joint torque trajectory was obtained by torque control using back stepping control gain and PD+ laws control gain. By using time vary stiffness tracking control, 9 this research presented the control design technique with LMI method using state space model. The design was verified by simulation method. Similarly, propose of novel variable stiffness actuator was discussed with variable impedance actuation (VIA) control technique. 10 The result stated that VSA-II was enhanced the higher torque than the previous VSA-I prototype.
The new variables compliance actuator was proposed for prosthesis devices and exoskeleton systems by Tsagarikis et al. 11 The design concept is mainly using antagonistic-actuated variable stiffness joints. They proposed the stiffness regulation for tuning actuator to resist the force. The design of series elastic actuators (SEA) was presented the construction and working principle with dynamic modeling and analysis of the actuator for variables impedance control. The experimental results showed the validation the design concept and force control with specific ranges applied in a wearable exoskeleton rehabilitation robot.12,13 The design and construction of a biped robot of joints with the control of stiffness and damping independent control variables was proposed by Enoch et al. 14 Independent variable stiffness and damping are suitable for providing the required torque and stiffness during biped locomotion and can maintain the joint at high stiffness value.
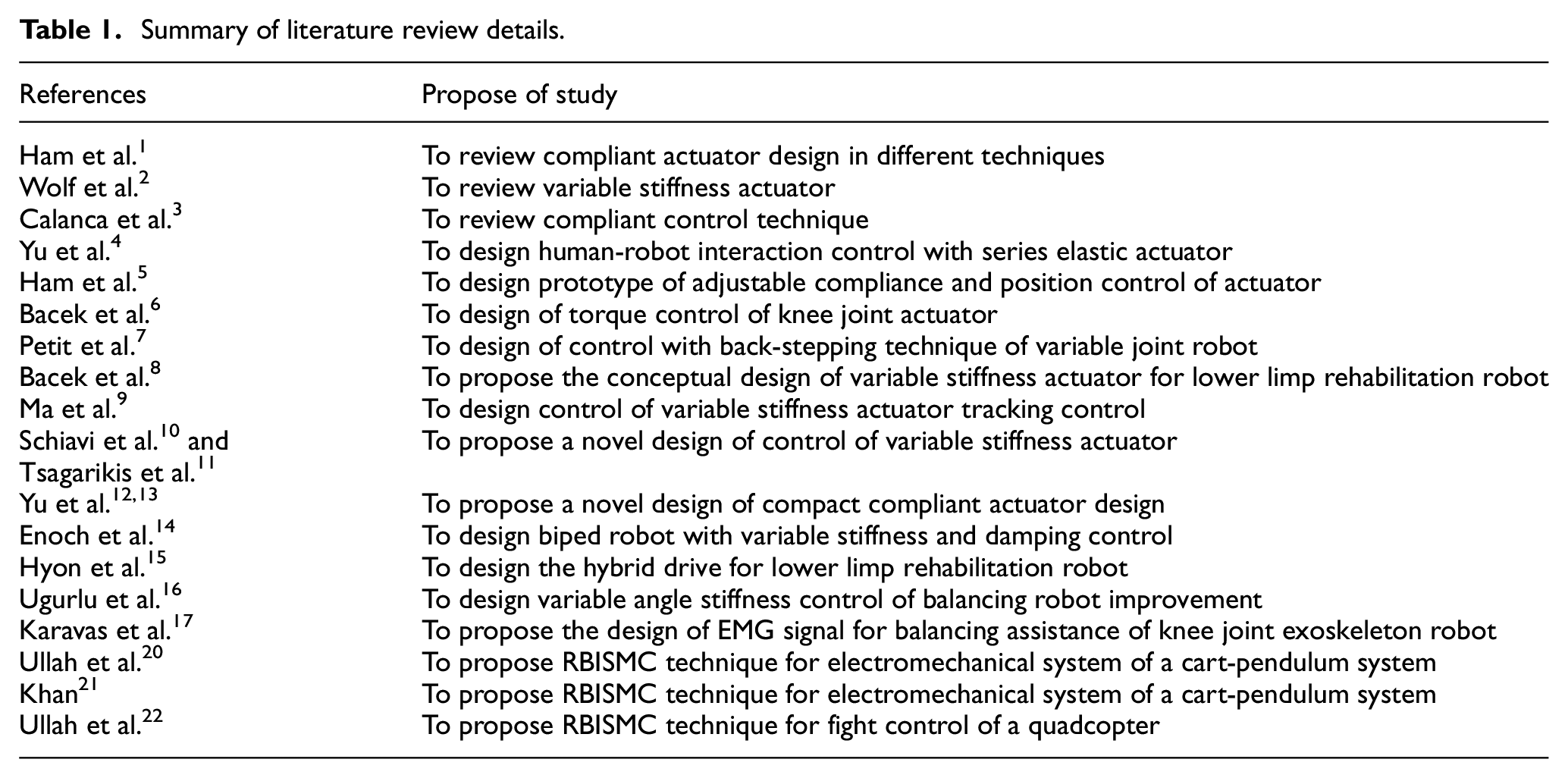
In order to enhance with higher torque, the design of hybrid drive of a lower limb exoskeleton robot, XoR2 was proposed by Hyon et al. 15 Hybrid drive of dc servomotor and pneumatic artificial muscle (PAM) has performed the control advantage for passive stability of joints. Research on improve balance control of biped exoskeleton robot was proposed the variable ankle stiffness technique. 16 Balance control technique is adopted the zero moment point (ZMP) and ankle stiffness of joint with optimal constant stiffness methods. Additionally, the balance control technique was presented to apply the human inspire balancing assistance for assistive exoskeleton device. 17 They investigated the correction technique of center of pressure and stiffness model of knee joint. Their results showed that the command of lower limb trajectory could be generalized effectively in balancing control of assistive exoskeleton device. In summary of literature survey, review references are summarized in Table 1.
Summary of literature review details.
Most of research reviews have proposed several control and design methods for compliant joint actuation trying to improve the accuracy and high efficiency of motion control. In a different approach, this research is aiming to control torque of a compliant joint actuation of assistive robot in order to gain higher torque of a knee joint of assistive robot. This research has contributed by applying the supervisory control for compliant actuation that verified by experiment method. Indeed, the design and development of passive compliant actuation joint of assistive robot is described in section 2. Section 3 shows the Mathematic model and the design of torque control of compliant joint actuation system. The design of torque control with the technique of supervisory control technique of PID and RBFNN controls is verified by both simulation and experimental tests. The experiments are set up, as described in section 4, to verify the comparison between modes of control. (i.e. pure PID, pure RBFNN, and supervisory PID with RBFNN control.) The supervisory control of PID with RBFNN achieves the highest response and stability of torque control even with the nonlinear value of spring during the activating of robot joint.
Design and development of passive compliant actuator joint
A passive compliant actuation is an assistive device that designs for human movement amplification. The design is aimed at storing and releasing energy with high efficiency while providing controllability and keeping the weight and complexity small. The actuator provides a controllable joint torque by means of the variable stiffness. The device is normally interconnected links with conversion of spring stiffness to gain force and torque control methods. The wearer feels scaled-down loads while interacting with objects in the environment, while most of the load being carried by the exoskeleton or links.
This compliant actuation joint is designed with new concept to obtain higher torque generated by using mechanical spring stiffness varied with angular displacement of actuation joint. Measurement for angular displacement of joint and linear spring stiffness is conversely for force exertion and joint torque control vice versa.
Assuming two adjacent limbs connected with a rotary joint, two main pieces of mechanical ternary linkages are and connected with aligned axis of rotation. The system performs a planar motion. Three control linkages are connected together to perform another control pivot point. A control spring system is attached to the central control link, converting spring force to assisting torque. The angular displacement can be measured by photodiode positioning system. 18 This measurement device is applied the visible light signal by using LED as a transmitter and using photodetector as a receiver between joint displacement and exerting force during motion. Such device emits very low electromagnetic interference (EMI) as proposed for using in medical application referred to CISPR 15 ed. 8.0 proposed. 19
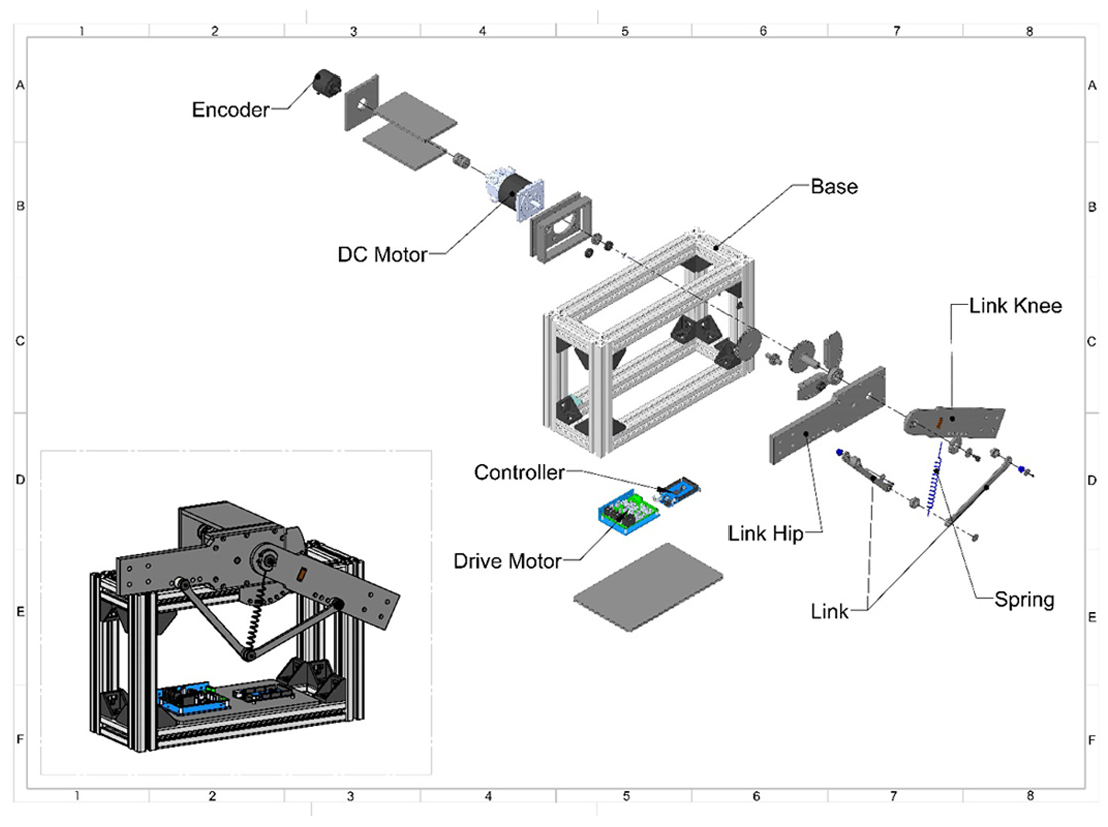
This passive compliant actuator joint is primarily designed as shown in its three-dimensional (3D) structure and assembly design in Figures 3 and 4, respectively. The test system is as depicted in Figure 5.
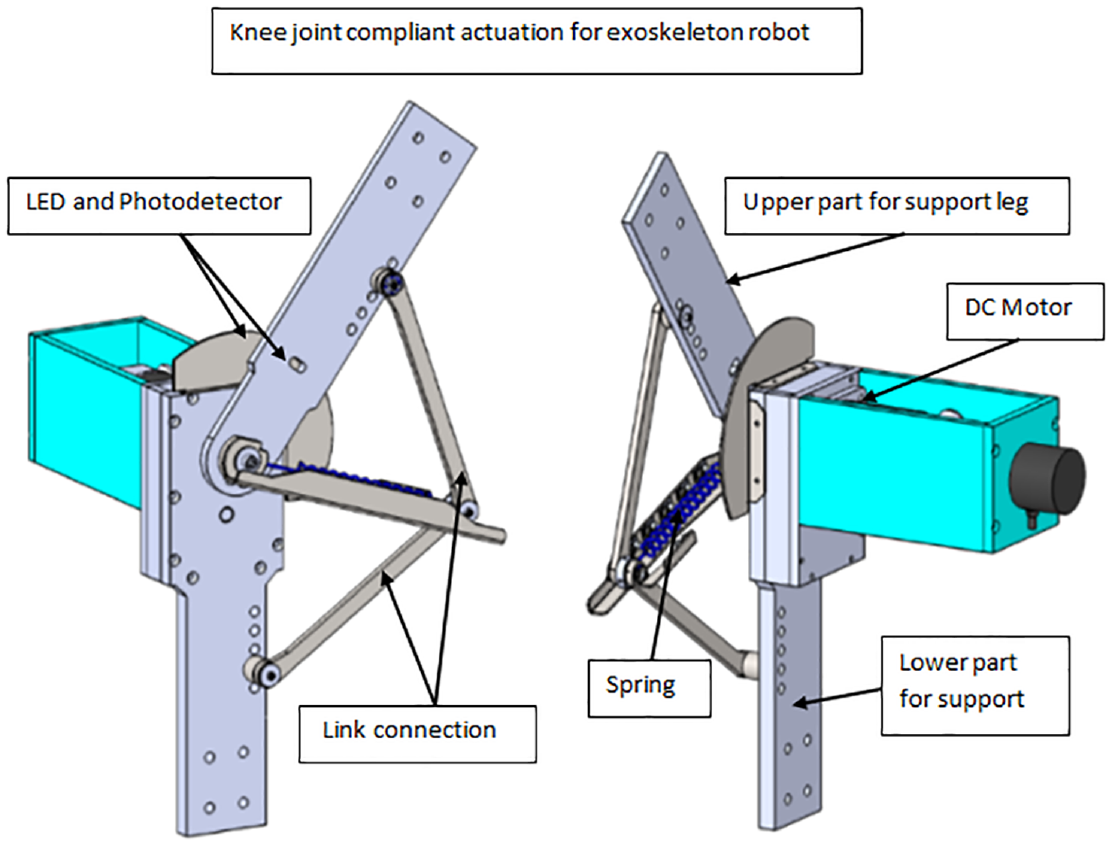
3D design of a compliant actuation for medical application.
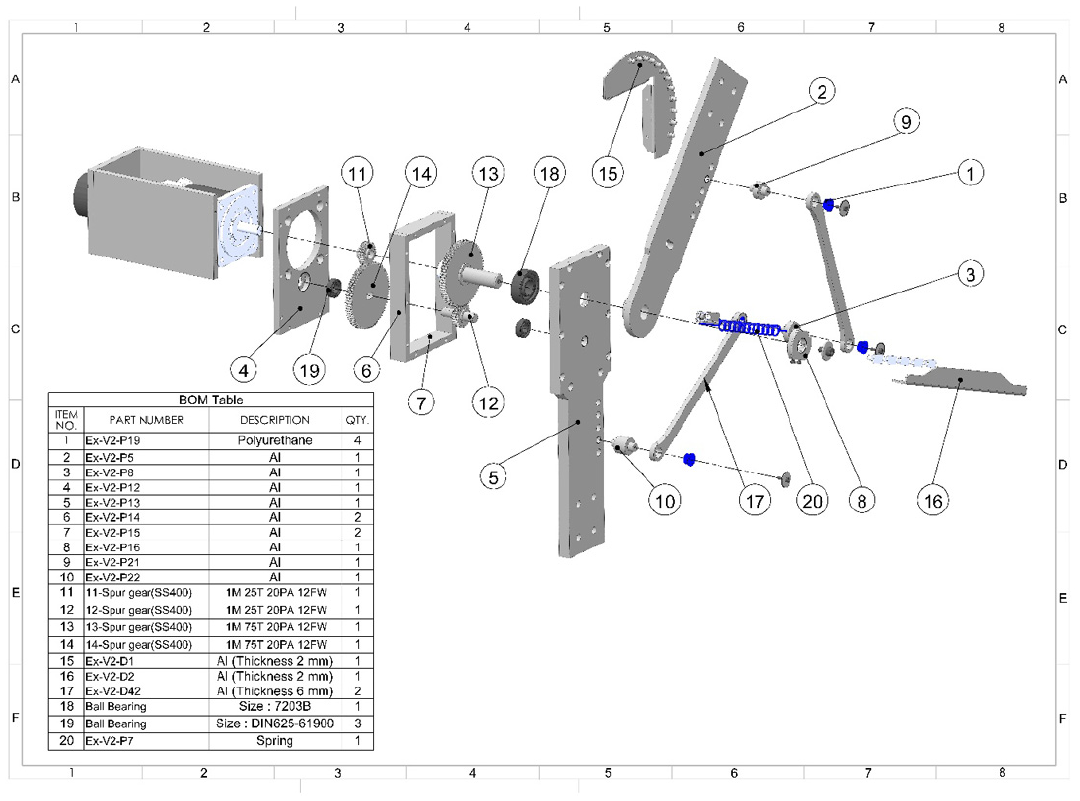
Assembling design of a compliant actuation for medical application.
The proposed overall hardware design of a compliant actuation for medical application.
Mathematic model of compliant joint actuation system
The displacement of spring generates force, converting to the acting torque around the joints. Geared DC motor is acting as a driving torque actuator. The control system was designed and developed by using MATLAB with Arduino software package. The new design of torque control for compliant joint actuation is proposed by using the hybrid between supervisory Radial Basis Function Neural Network (RBFNN) and PID control methods. The controller gains are adjusted by weight of Radial Basis Function Neural Network. The results of simulation and experiment are validated in control aspect.
A simple variable stiffness control with series actuation system is depicted in Figure 6. Then the mathematical model of VSC system is formulized as follows.



Assuming very low friction forces, equation (1) represents the dynamic equations of the system. Where

Using model of strict feedback form of robot control system is following to by equations (5)–(7).



When

Form Figure 7, the actual position

Where

With equilibrium condition, joint variables can be defined by

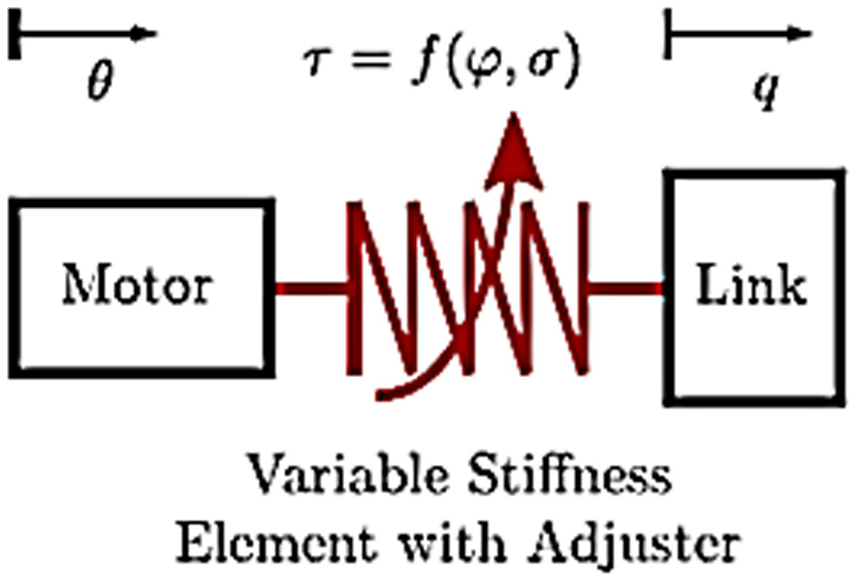
Diagram of VSC system.
Torque and characteristic of VSC system.
Kinematic model for passive compliant actuation joint
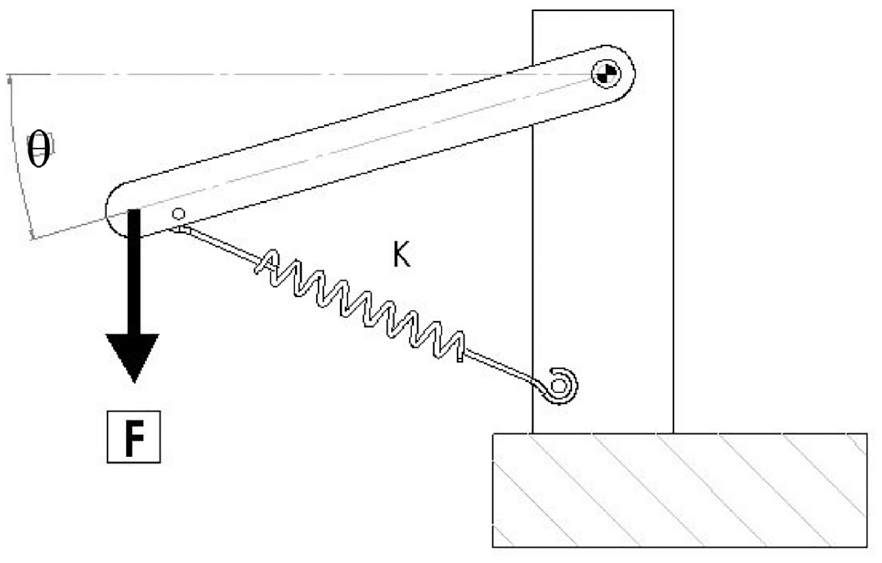
The actuation robot joint prototype with overall system configuration of the kinematic and free body diagram is illustrated in Figure 8.
Kinematics model of joint.
Force derived by spring is illustrated by equation (12).

Thus the spring stiffness constant is calculated by equation (13).

Then it can be obtained the stiffness by equation (14).

Radial Basis Function Neural Network for control design
Radial Basis Function Neural Network (RBFNN) is implemented in design of control system for a passive joint actuation as the structure illustrated by Figure 9.
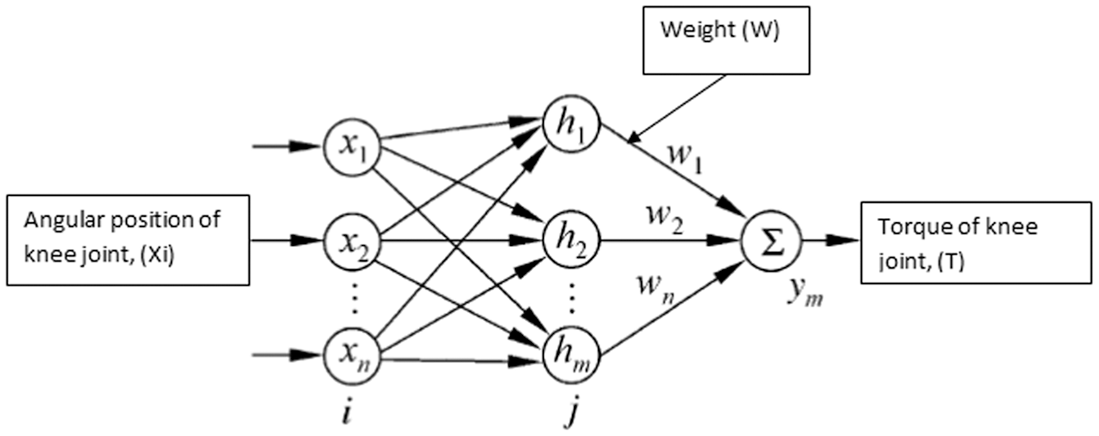
Structure of RBF Neural Network.
Structure of RBFNN composes of input layer, output layer and hidden layer. Gaussian function is applied to estimate the relationship of output and input values in hidden layer defined as follows.
Input vector

Hidden layer

When center vector
For width vector,
Output vector is calculated in equation (20)

Where the parameters is represented as follows.
From Figure 10, control signal is approximated by RBFNN is obtained by equation (21). RBFNN aims for adjusting the weight output of RBFNN output signal by modify for minimize cost function of square error signal between output signal

Where
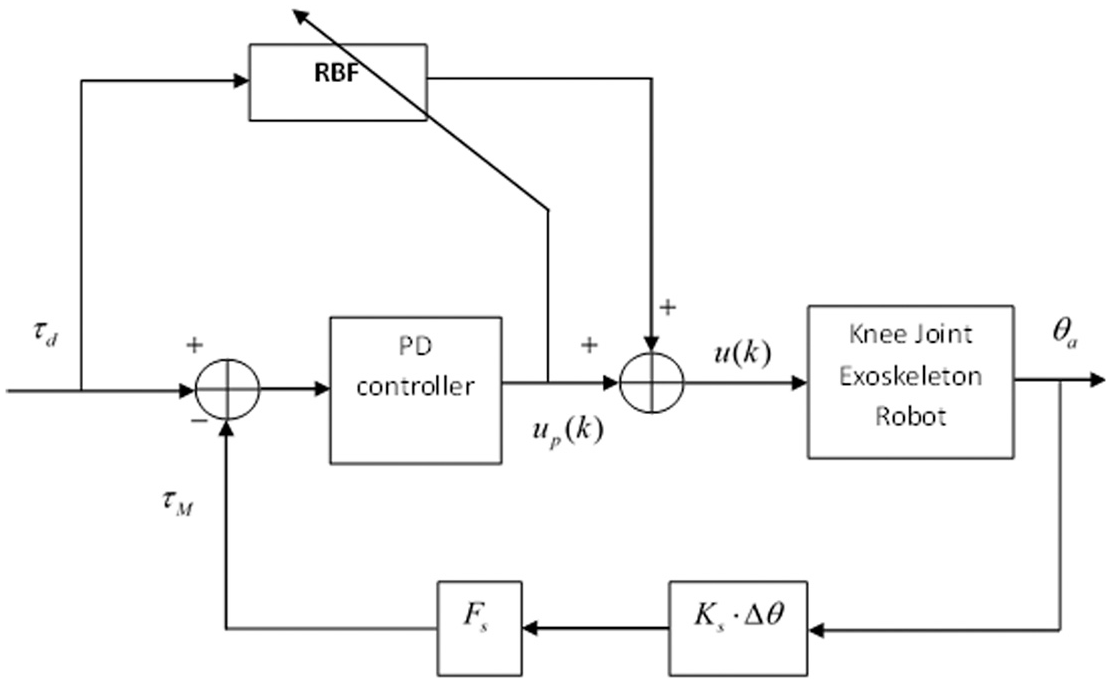
Block diagram of control system design with RBFNN approach.
The condition of control signal of

The optimization approach is by weight adjustment by using steepest descent (gradient) method. Thus the learning algorithm is changed by calculating by equations (23) and (24), respectively.


When
Simulation and experiment results
Simulation results
Transfer function of system is represented by equations (25) and (26).


Parameters for setting the control design for RBFNN approach for weight adjustment by using steepest descent (gradient) method. The structure of RBF neural network is designed for 1-4-1 RBFNN. The initial weight is randomly selected and specified the center and bias vector as
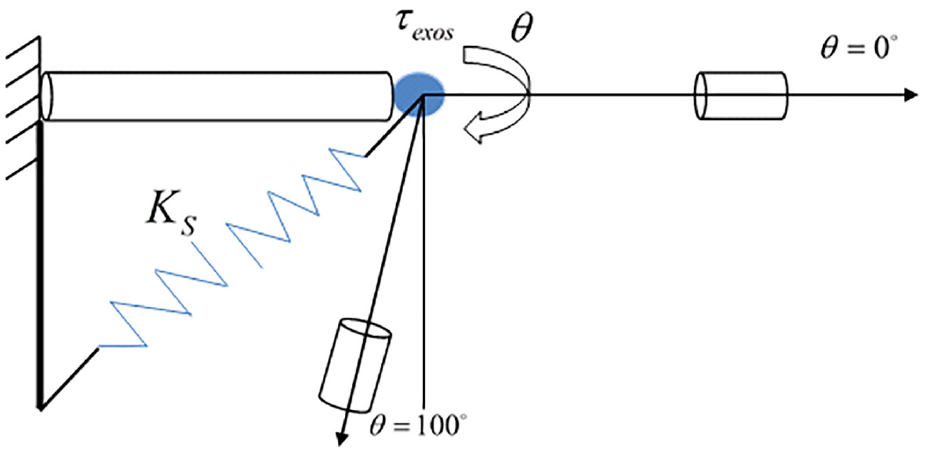
Torque control design with spring reinforcement of knee joint for assistive exoskeleton robot.
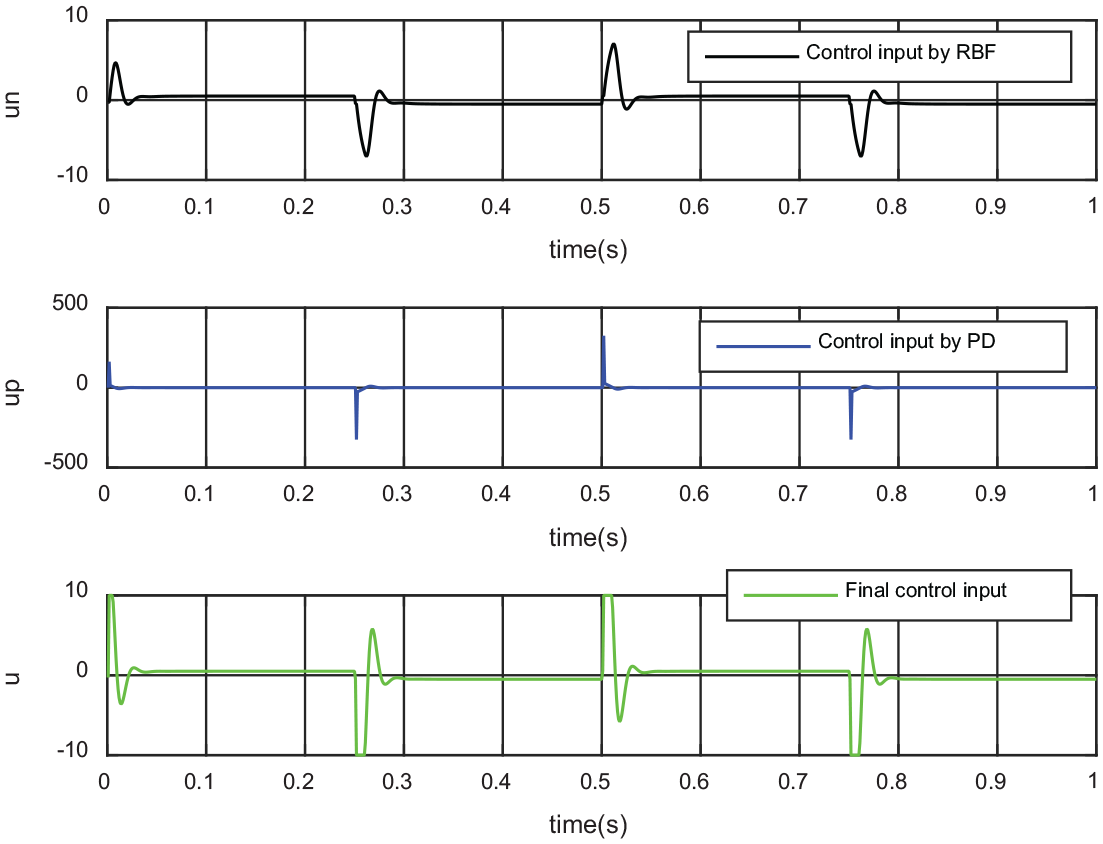
Each of control signals for supervisory RBF control.
Experiment results
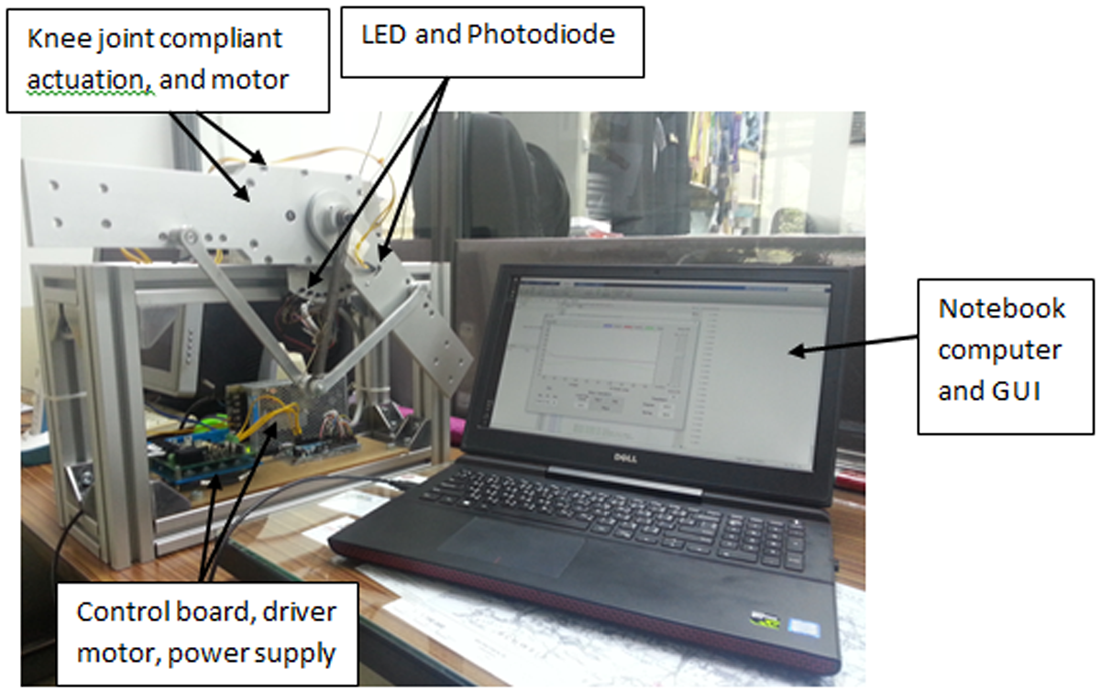
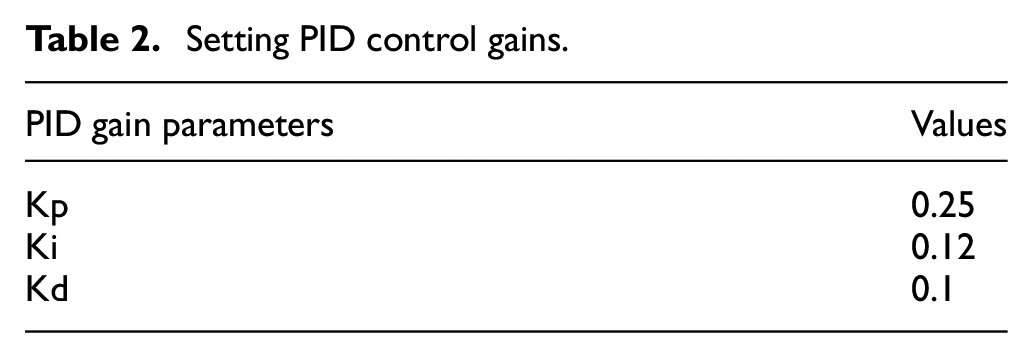
The experiments are conducted to three types of torque control method for a passive compliant actuation of knee joint for assistive exoskeleton robot application as depicted in Figure 13. The system structure of electronic and device hardware component consists of computer notebook, Arduino mega 2560, LED and photodetector, DC motor driver with four quadrant with 80 Amperes, DC motor with 24 Volts, 2 Amperes. Arduino mega 2560 is applied for input and output signal. Input receives sensor signal as LED and photodiode, and output sends a controlling command PWM signal to actuating DC motor attached with knee joint of robot. The control algorithms have implement to verify the performance control method. Measurement data is received from sensory device such LED and photodetector, and manipulated signal by digital controller. The controller sends the command signal derived by each controller such as PID, RBFNN, and hybrid system to control a passive compliant actuation device. The results of control performance display on window GUI graphic using MATLAB software for system development. GUI interface is developed for assigning and receiving data between controller and computer. Start and stop control of compliant actuation joint commands on window including torque feedback data and graphic data display. Gains of controller are adjusted during experiment by tuning methods setting by Figure 15. Gains of PID controller and PID and RBFNN controller set values by Kp = 0.25, Ki = 0.12, and Kd = 0.1 in experiment investigation.
GUI monitor for elastic actuating torque control system.
Photo of experiment setup. Operation and design of transmitter and receiver device, Light-Emitting Diode (LED) and photodetectors, was described by. 18 Angular displacement of joint is measured by LED and converted signal to spring stiffness to gain force feedback. Conversion of force to torque is proposed for control design and implementation on these experiments.
Joint torque control is proposed to novel design of control technique. Force is generated by spring positioning that measure by LED and photodiode. Force is converted to torque variables for designing joint torque control mode of dc motor with gearheads. Innovative aspects of control strategy has adopted for supervisory control of PID and RBF control with a new measurement positioning technique by using LED and photodetector for medical application.
From experiment, results of control techniques are illustrated in Figures 13 to 18. Figures 13 and 14 were shown the hardware for experiments set up. Overall control result was depicted in Figure 15. Result of PID control was illustrated in Figure 16, and PID with RBFNN control was demonstrated in Figure 17. The result of supervisory control methods with PID and RBFNN control structure was presented by Figure 18. In conclusion, the high performance supervisory control of PID and RBFNN method was applied to control a passive compliant actuator joint of an assistive exoskeleton robot prototype.
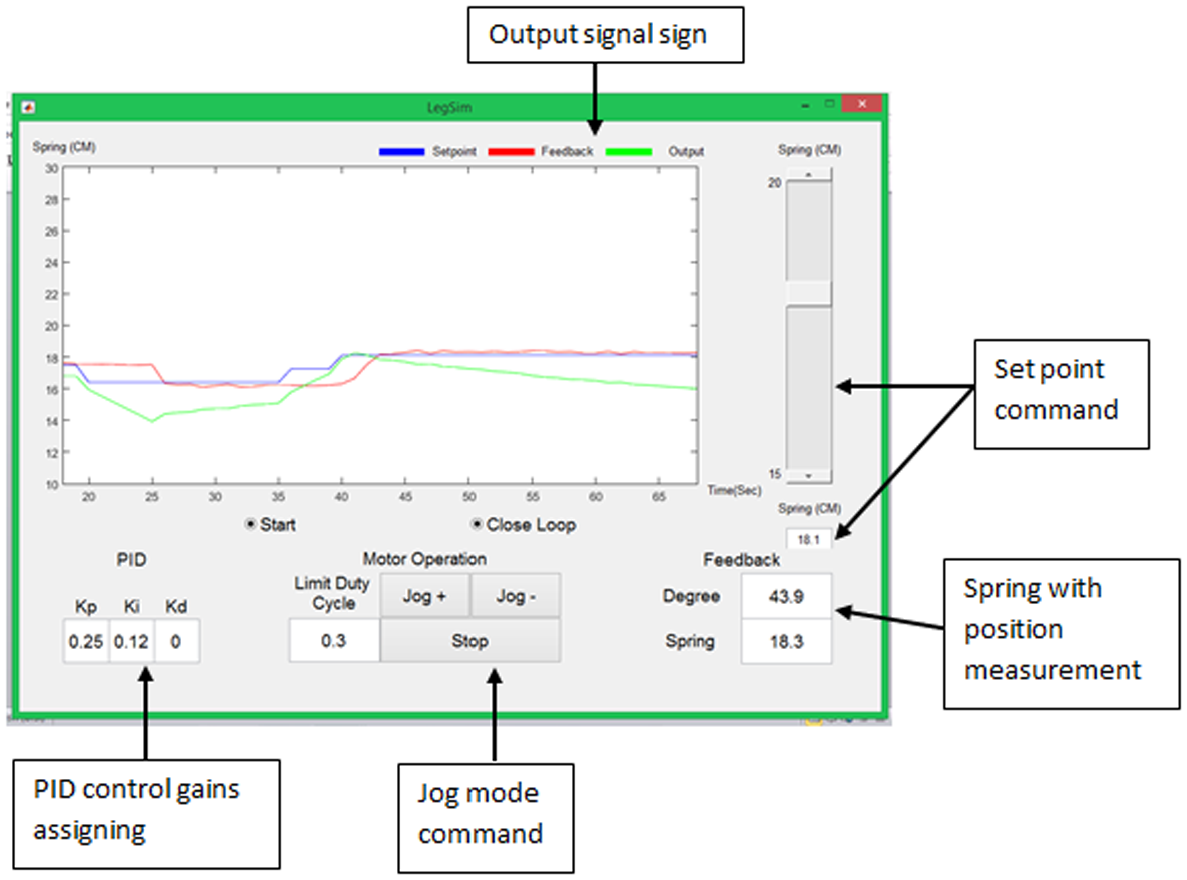
GUI monitor for elastic actuating torque control system.
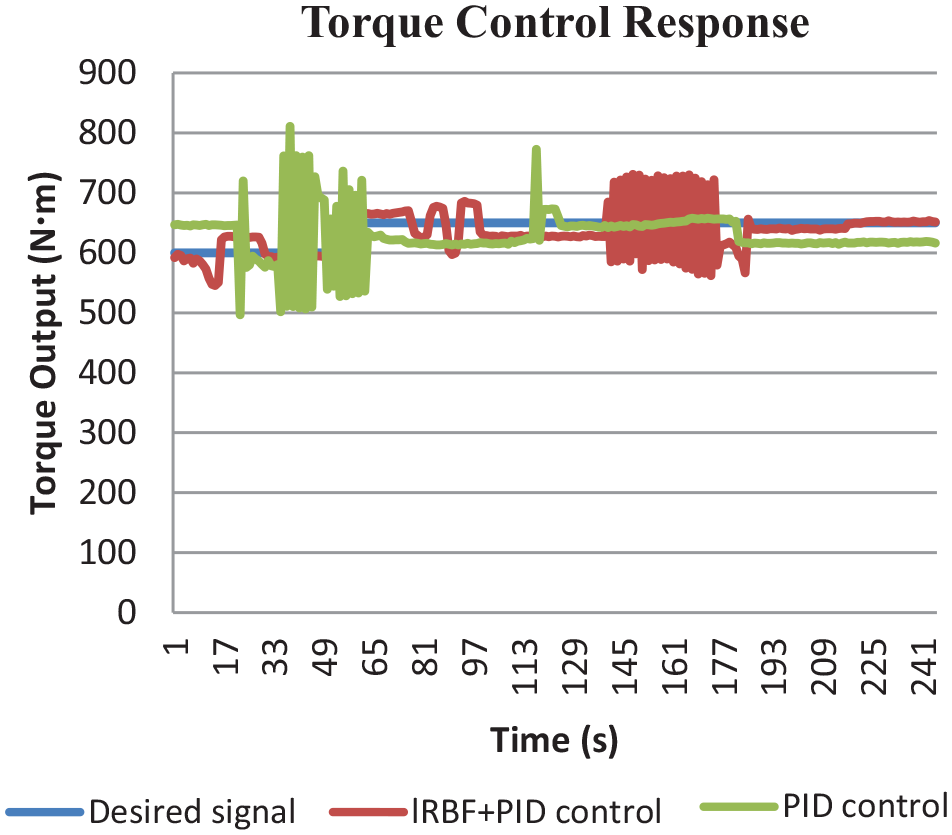
Results of all applied control techniques.
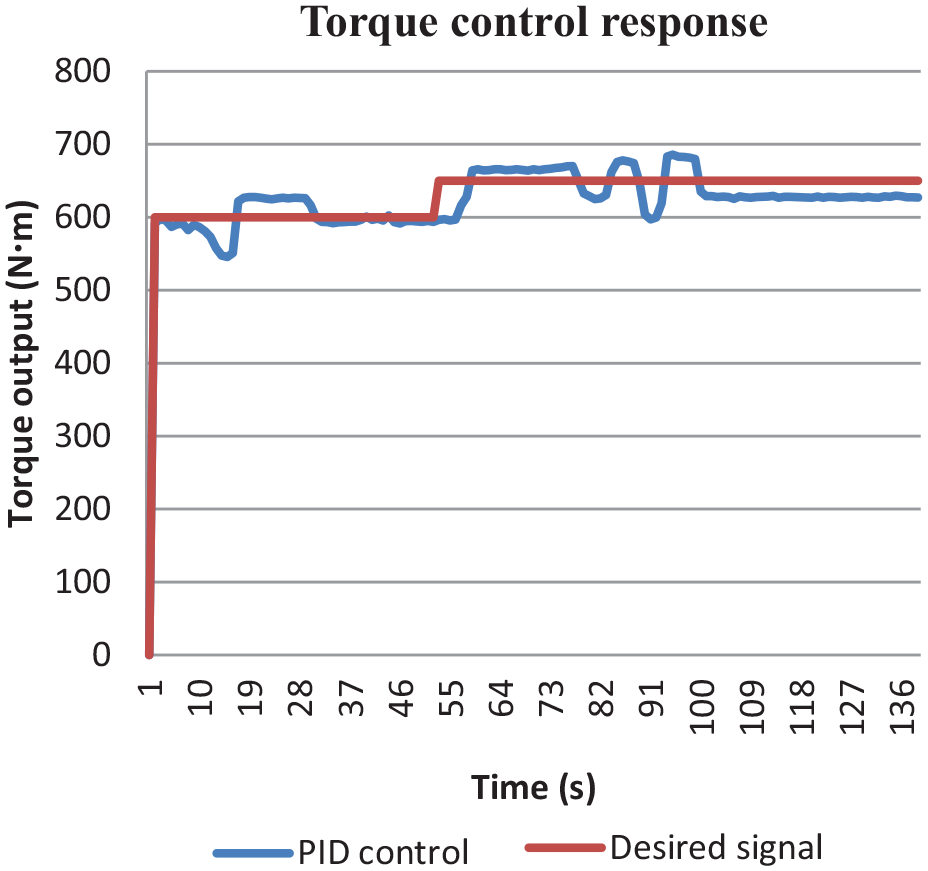
Response of PID control.
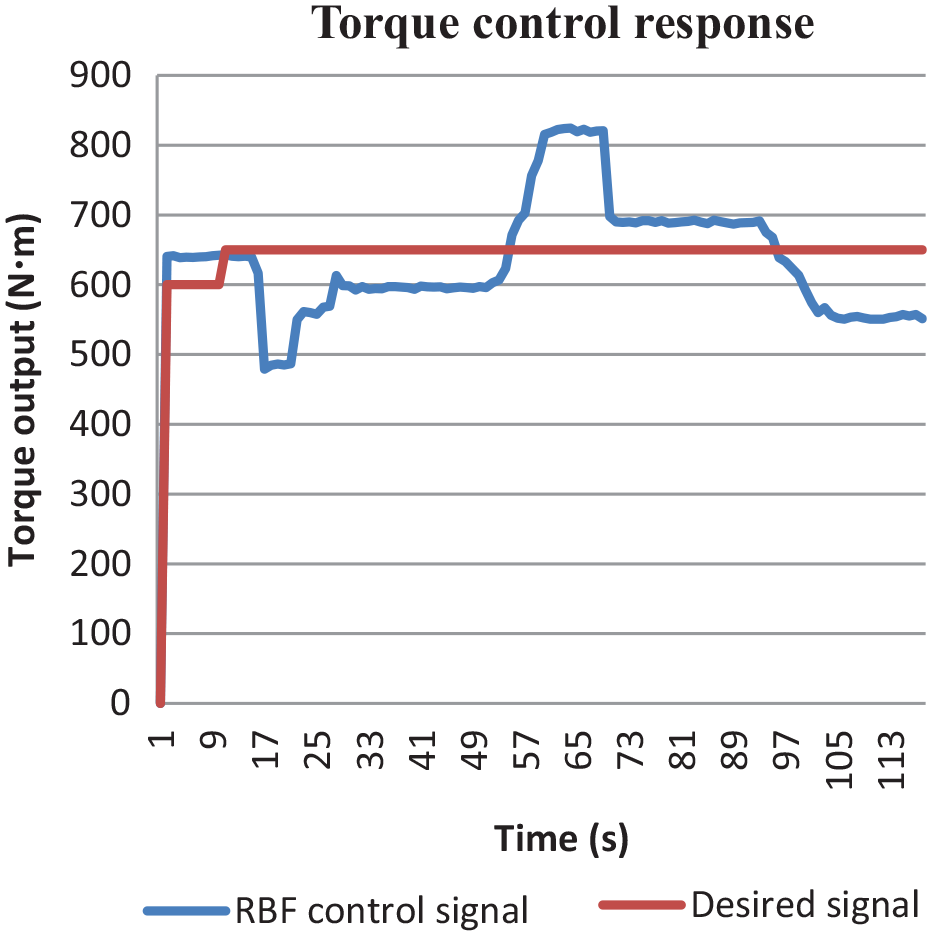
Response of RBFNN control.
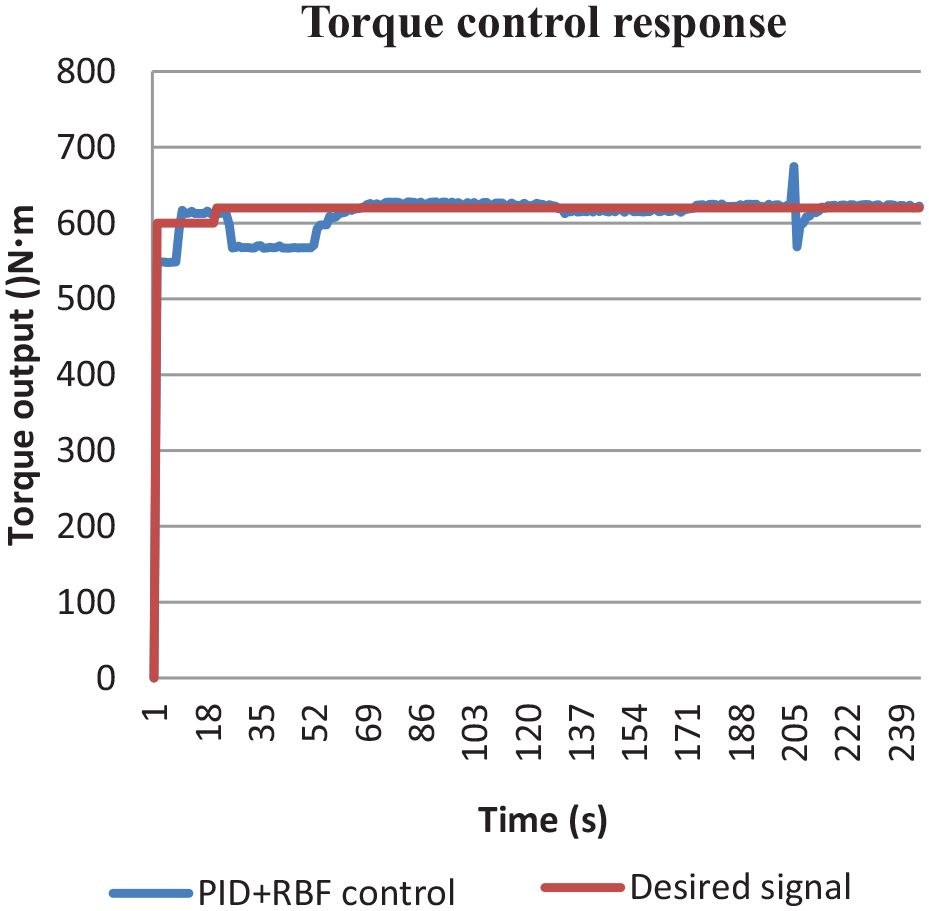
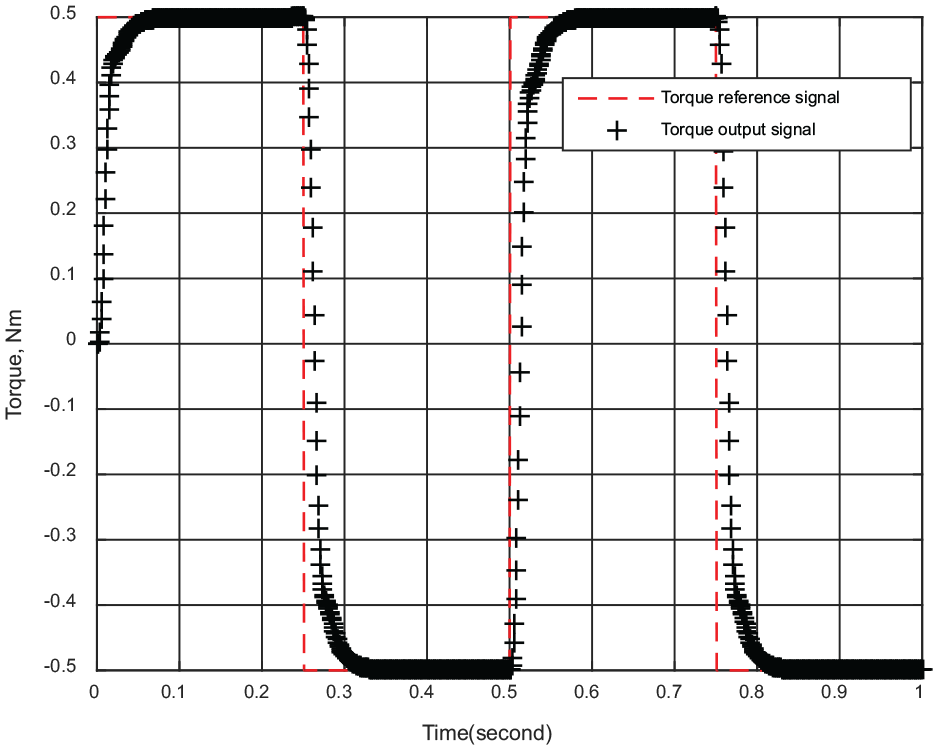
Response of supervisory control with PID and RBFNN control.
Verification of control parameters and variables from experiment
The verification of design control parameters and variables have extended to study effect of change control parameters and variables as following details. PID gain is set manually through GUI interface as shown in Table 2, and Table 3 shows the basis of changing RBFNN parameters and variables by experiment methods.
Setting PID control gains.
Setting RBFNN parameters and variables.

Table 3 represents the setting of RBFNN parameters and variables through GUI interface done by several experiments. The most effects to control compliant actuation by using the technique of supervisory control, RBFNN and PID control method, are described. For RBFNN parameters and variables, the centroid of Gaussian function
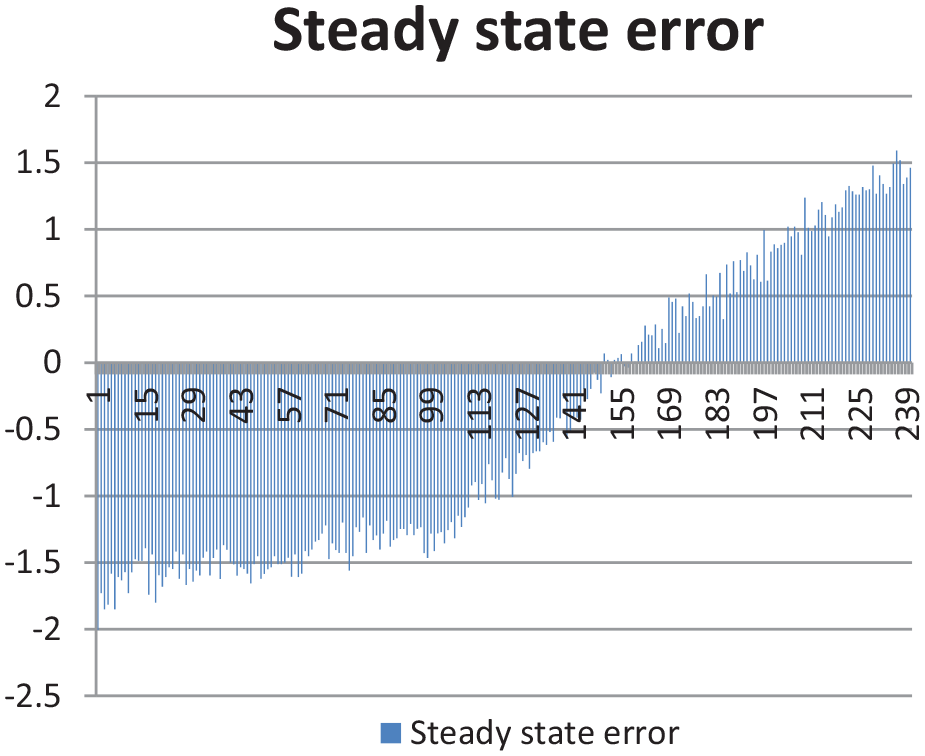
Response of supervisory control with PID and RBFNN control with narrow centroid of Gaussian function (C) for [–3 1 1 3].
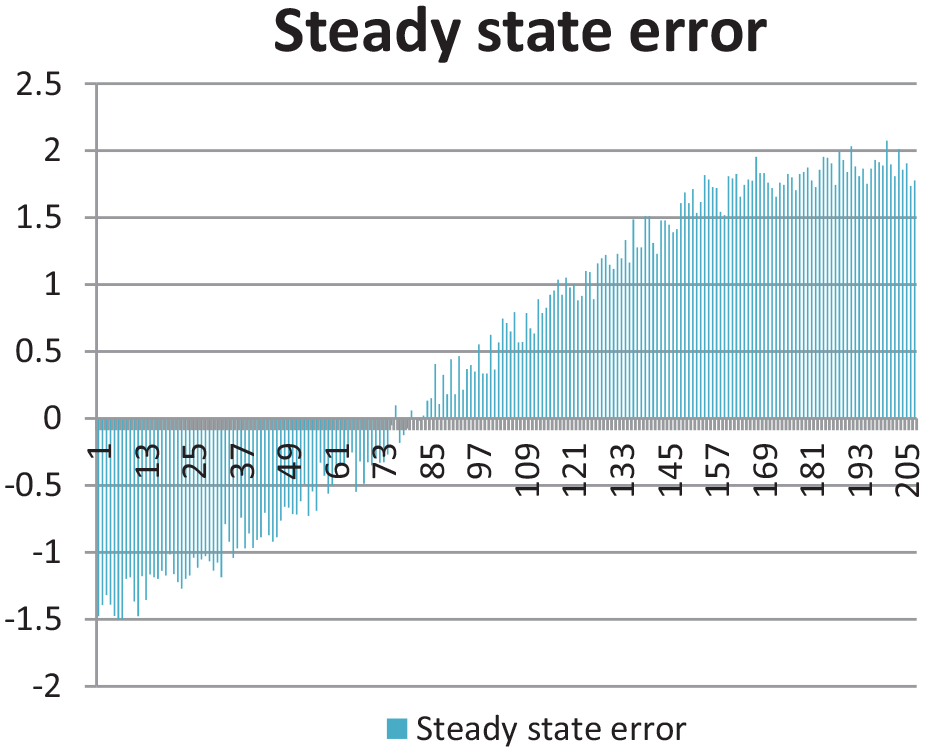
Response of supervisory control with PID and RBFNN control with larger centroid of Gaussian function (C) for [–10 1 1 10].
This experiment can be concluded that the appropriate centroid of Gaussian function (C) is set as following; [–2 1 1 2], [–3 1 1 3], [–4 1 1 4], [–5 1 1 5] are good enough for control response for compliant actuation application, and learning rate is 0.2–0.5. Otherwise if setting the centroid of Gaussian function (C) is higher from those values about [–10 1 1 10], [–20 1 1 20], [–100 1 1 100], and learning rate is 0.2-0.5, the response of control signal output is lower than the former set variables.
Conclusion
In this research, a new design and control for a passive compliant actuation with controllable stiffness was presented. The proposed supervisory control technique by using RBFNN with PID controller has higher performance than conventional PID control or only RBFNN control method. Higher performance of joint torque control improves the ability of gait motion of at each joints that needs. The gait of motion requires the joint torque from motor power. The single support of legs during standing and swinging motion would require higher actuating joint torque. From the result of experiment, error of torque control of compliant actuation is not instead of
Footnotes
Appendix A. Function of PID and RBF control
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by King Mongkut’s University of Technology North Bangkok. Contract no. KMUTNB-GOV-60-65.