
Abstract
With the development of measurement technology, the Flexible Measuring Arm (FMA) is widely used in quality test of automobile processing and industrial production. FMA is a kind of nonlinear system with many parameters. Low cost and efficient calibration method have become the focuses of attention. This article presents a fast calibration method for FMA based on an adaptive Genetic Algorithm (GA) just with several standard balls and a ball plate. It can greatly reduce the calibration cost than common external calibration method which needs high precision instruments and sensors. Firstly, the kinematic model of FMA is established by RPY theory. Secondly, the common GA is optimized and improved, and an adaptive mechanism is added to the algorithms which can realize the automatic adjustment of crossover and mutation operators. A Normalized Genetic Algorithm (NGA) with adaptive mechanism is proposed to complete the optimization calculation. It can improve the numbers of optimal individuals and the convergence speed. So, the search efficiency will be enhanced greatly. Finally, the Least square method (LSM), the General Genetic Algorithm (GGA), and the proposed NGA are respectively used to finish the calibration work. The compensation accuracy and the search efficiency with the above three different algorithms have been systematically analyzed. Experiment indicates that the performance of NGA is much better than LSM and GGA. The data also has proved that the LSM is suitable to complete optimization calculation for linear system. Its convergence stability is much poorer than NGA and GGA because of the ill-condition Jacobin matrix. GGA is easy to fall into local optimization because of the fixed operators. The proposed NGA obviously owns fast convergence speed, high accuracy and better stability than GGA. The position error is reduced from 3.17 to 0.5 mm after compensation with the proposed NGA. Its convergence rate is almost two time of GGA which applies constant genetic factors. The effectiveness and feasibility of proposed method are verified by experiment.
Introduction
In recent years, industrial Flexible Measuring Arm (FMA) have been widely used in manufacturing industries. It has obvious advantages of large workspace, simple structure, and low cost. It is commonly applied to the processing quality test. However, its low accuracy restricts that this kind of measuring equipment is difficult to be used in the high precision field.1–5 The accuracy of FMA can be improved by kinematic compensation. Calibration methods include self-calibration and external calibration. External calibration owns high compensation accuracy with high precision instruments and sensors. However, this calibration method owns high cost, complex operation, and low efficiency.6–9 Self-calibration method applies optimization algorithm to finish the calibration work based on measuring data. It has low cost, high automation and easy operation. But its compensation accuracy is lower than external calibration.
Cui et al., 3 Li et al. 4 and Zhu et al. 5 have proved that the test error of FMA will be amplified with the number incensement of joints. So, it is significant to improve accuracy by calibration. Now the key problem is how to design an efficient algorithm which owns fast convergence and high accuracy to complete a lot of calculation. It is necessary to establish a reasonable error model to realize calibration.
Traditional DH error model has less parameters. But it just only describes the transformation at X and Z direction between two adjacent coordinate systems. Therefore, it is difficult to realize error compensation at Y direction. So, its calibration accuracy is low. The numerical algorithm can improve the calculation speed of data and the efficiency of calibration. Least Square Method (LSM) is widely used in data calculation for robot system.10–15 But these problems of large calculation, low stability, and highly sensitive to initial values will lead to low calibration efficiency and convergence stagnation especially for multi parameter system. Therefore, the numerical algorithm has become the research focus in recent years. General Genetic Algorithm (GGA) can avoid much matrix calculation compared with LSM. And it also has low dependence to initial value. But control factors are always set fixed values which results in low convergence rate and poor population’ diversity. It is very important to build a precision error model and propose an effective calibration to realize error calibration. In this paper, we make optimization of GGA and introduce an adjustment mechanism to realize the automatic optimization of key genetic operators. An adaptive normalized genetic algorithm is summarized and proposed to solve these problems of low search efficiency and premature convergence of Genetic Algorithm.
This article applies above three algorithms to make error compensation based on RPY model. Zhao et al. 9 has proved that the kinematic model based on RPY theory can reflect the translation and the rotation error at three axis’s direction which is more accurate than DH model. Experiment indicates that the accuracy is improved to 0.38 mm just after 320 generations searching by proposed NGA with adaptive factors. GGA’s compensation accuracy is 0.42 mm after 646 generations. Then, final accuracy of LSM is only 1.52 mm which doesn’t meet the accuracy requirement because of ill condition of Jacobin matrix. The proposed method in this paper just applies one ball plate and several standard balls to realize the error calibration of FMA, which has obvious advantages of fast, high efficiency, and low cost, and experiments has proved the effectiveness and feasibility of the proposed numerical method.
Error modeling of FMA
Kinematic model
The researched FMA includes one linear guide rail and three rotation joints in Figure 1. The probe is fixed on the rotating platform, shown in Figure 2.
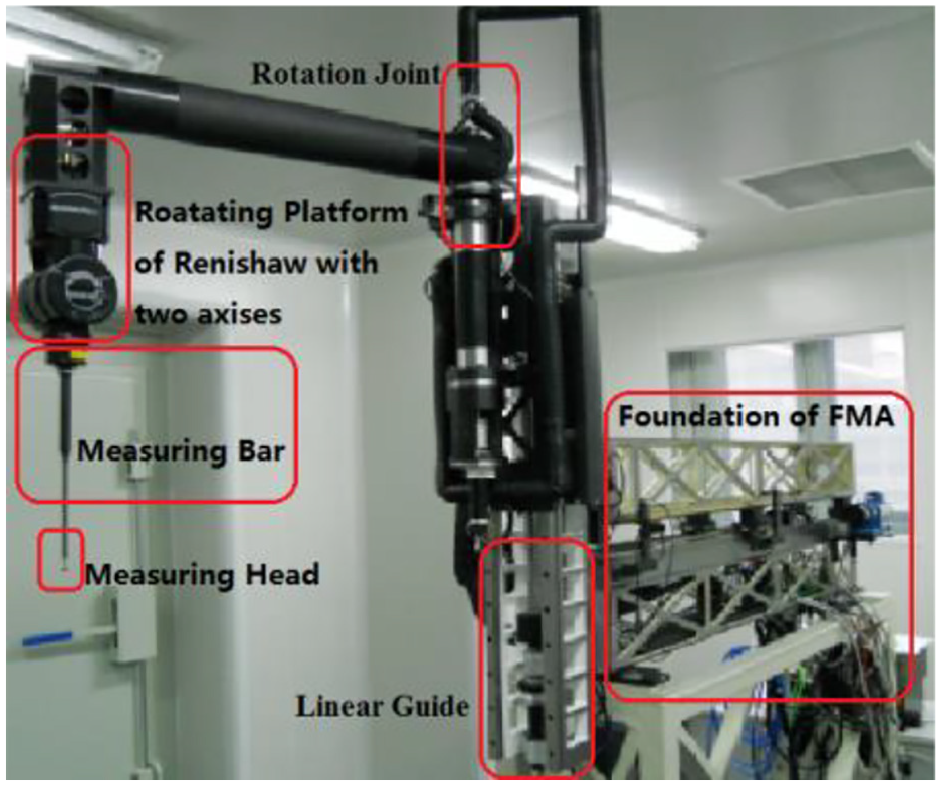
Flexible measuring arm.

Rotating platform.
FMA’s coordinate system is established shown in Figure 3. Base coordinate system
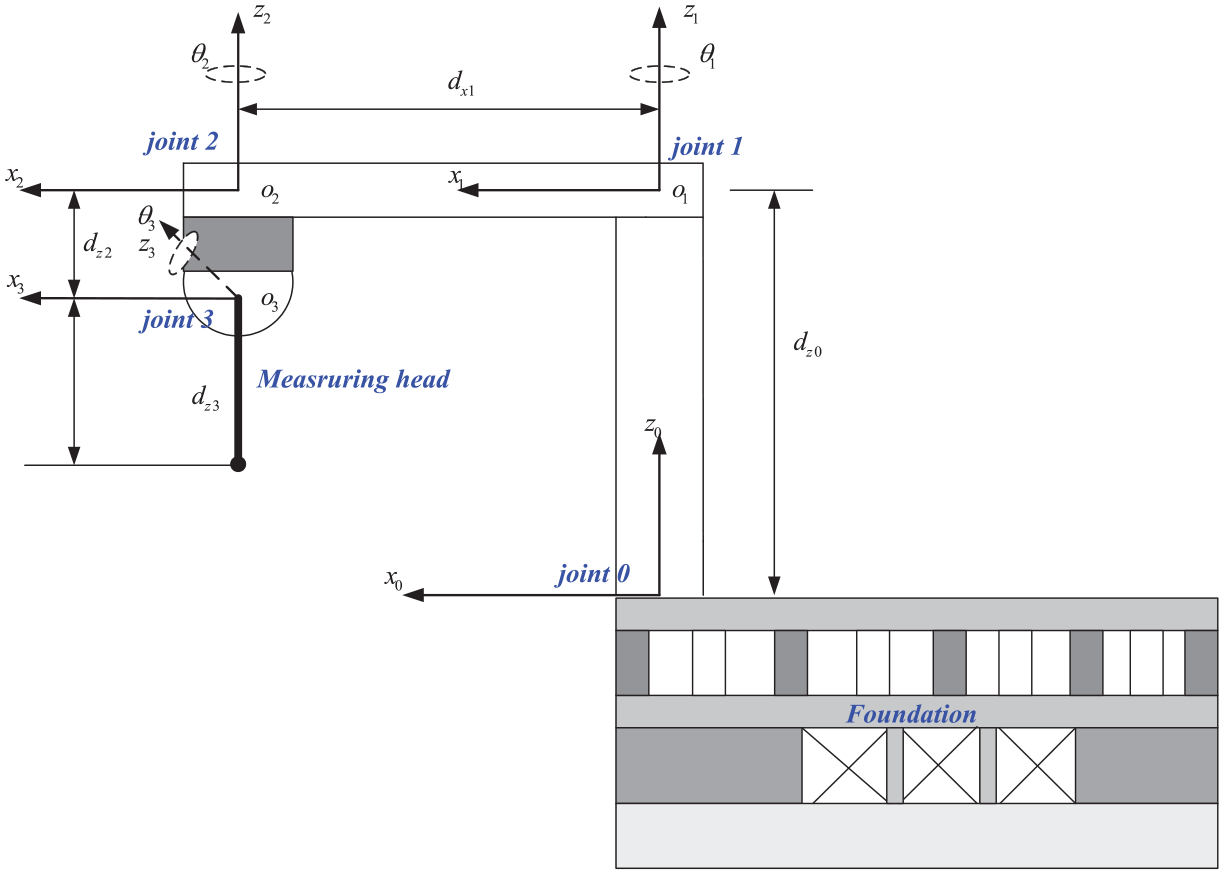
Coordinate system of FMA.
The transformation matrix between two coordinate systems can be defined as following:

In this formula, matrix
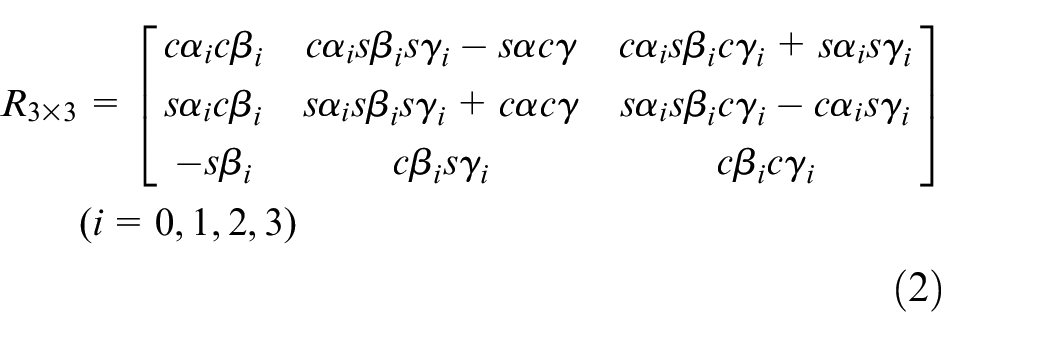

Where
In the formula,
So, the kinematic model of FMA can be expressed as follow

where

The system contains 24 parameters based on the above equation (5) and all parameters can be expressed as
Then the equation (5) can be furtherly modified as

We apply

Therefore, the actual coordinates of the i point can be calculated by

Sample points are measured by FMA on a standard ball which is fixed on the workspace. N is the number of sample points, and

The main work of error calibration is quickly to obtain
Error modeling
We make derivation for equation (8). Then the equation can be obtained and written as
with
And position error of every point between theoretical value and actual value can be calculated by

where

with

So, the error vector
Optimization of Genetic Algorithm
Traditional calculation methods such as Conjugate Gradient Method, Least Squares Method, and Newton method can finish calculation with high efficiency for continuous function.5,8,20,21 However, it is easy to fall into local optimization for nonlinear system’s calibration with the above methods. For example, if the iterative initial value has much difference with the actual value for LSM, its accuracy is much lower because the initial values make a great influence on the accuracy. Therefore, this kind of methods own poor stability. 10 The paper proposes a Normalized Genetic Algorithm with adaptive operators to finish data calibration work. The setting of proposed algorithm parameters is given as follows:
Coding mode
In the paper, we define

Where m represents individual number.
Initial population
An initial population must be generated before global calculation based on the genetic algorithm theory. We random generate two times of chromosome numbers in random mode which is given in equation (17).
Selection operator
The selection factor is used to choose optimal individual to reserve to the next generation based on the rule of superior quality for every generation population. Ping and Jian-lu 12 has proved that it can obtain better search result compared with other general selection operators in random uniform. So, we choose random uniform distribution for selection factor.
Crossover operator and mutation operator
Crossover operator
where

Fitness function

In this formula,

It represents the selection basis of the better individuals in every generation. A large number of excellent individuals can be selected to the next generation during iteration. It is helpful to improve the search efficiency of the algorithm.
Stop conditions
The equipment is applied in measurement of processing quality for general industrial parts, and its error requirement is 0.5 mm. Therefore, the permission error
Experiments
Principle of calibration
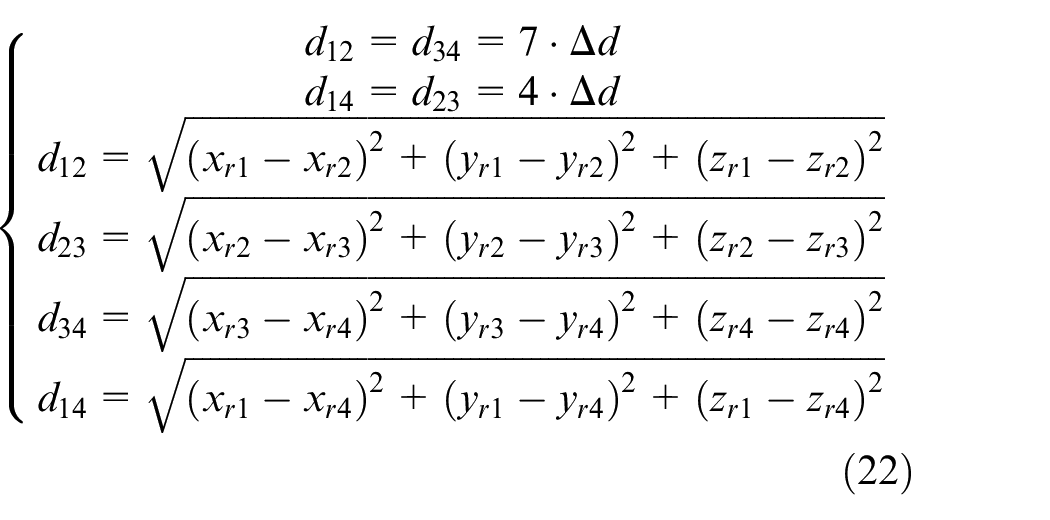
We apply a rectangular ball plate and some standard balls to complete the error calibration of FMA. The processing accuracy of plate is 0.01 mm. The radius r of the standard ball is 25 mm and its machining accuracy is 0.005 mm. The theoretical distance is
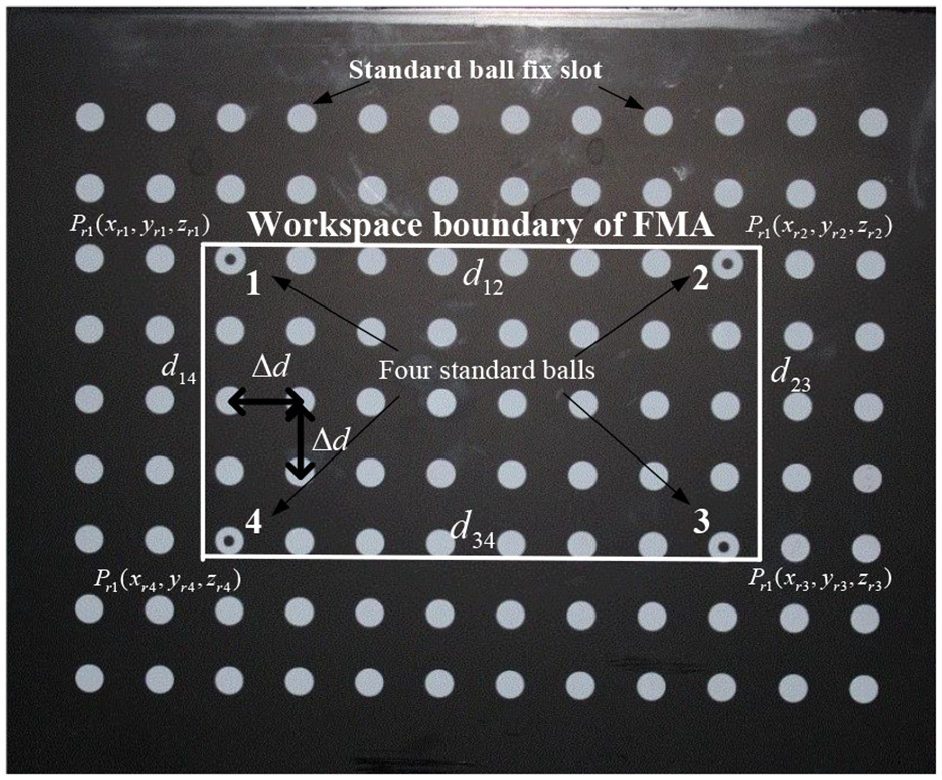
The distribution of standard ball in the workspace.
Figure 5 is the sampling diagram on the standard ball. The FMA has obtained the coordinates
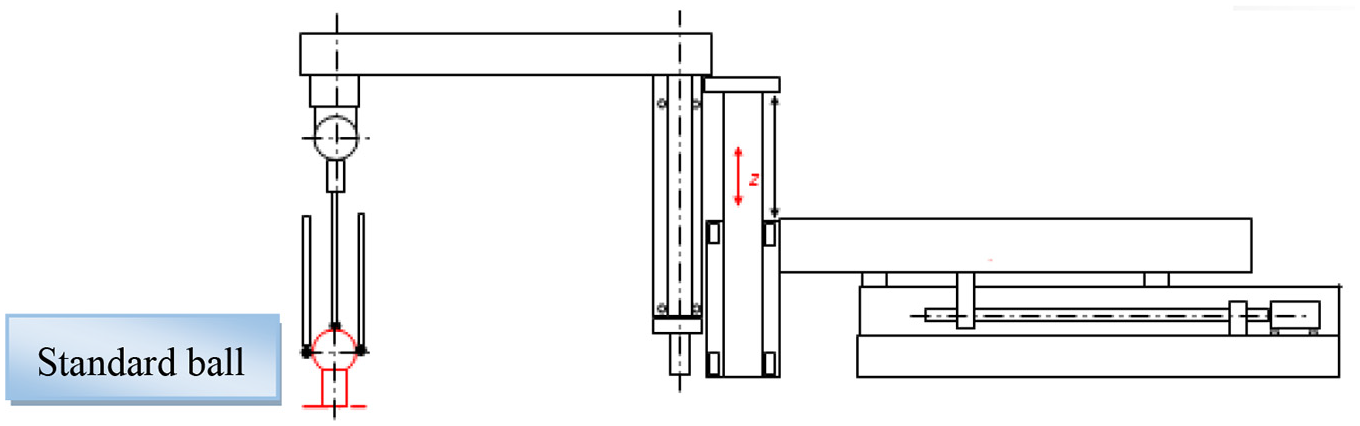
Data sampling on the standard ball.
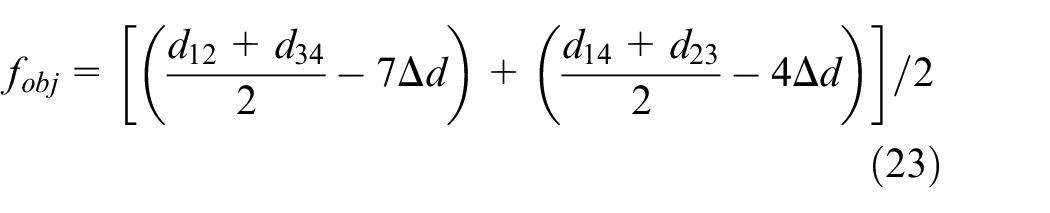
So we can obtain four actual distances such as
Then the compensation value of object function
In this paper, we finished the calibration through measure four standard balls. If the result can’t meet the accuracy, it will be solved by test more points. We choose five planes on a standard ball to take sampling data. The following Figure 6 describes the data distribution.
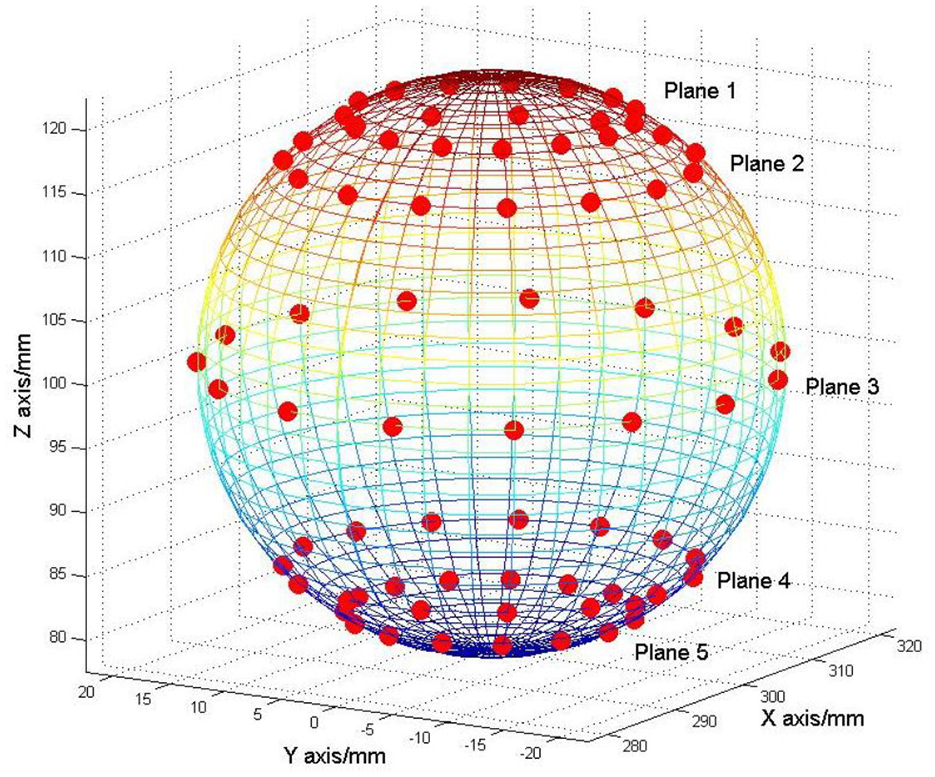
Theory points of five planes on the standard ball.
In Figure 6, we take 75 points at five planes on a standard ball. These points coordinates are known and we control FMA to realize measuring. When the stop condition is reached, the research of algorithm is stopped. Every plane set 15 points to test. Table 1 is structure parameters of FMA.
Structure parameters of FMA.
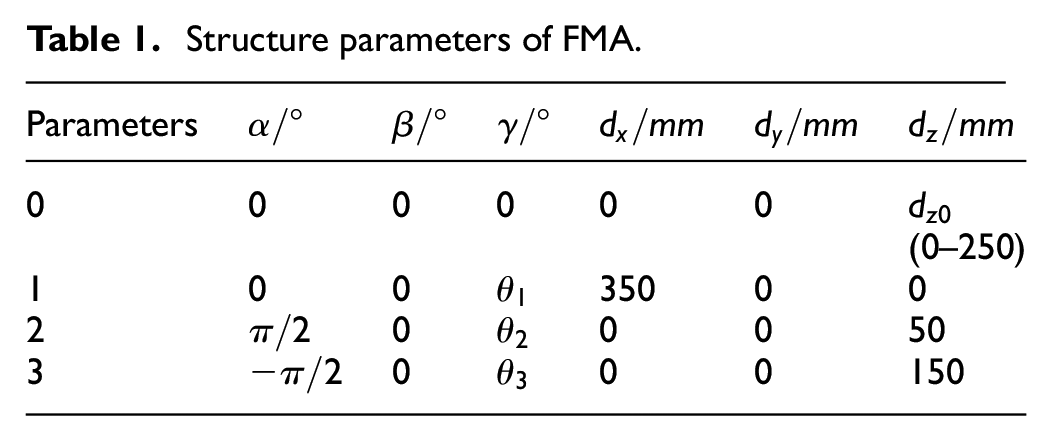
In Table 1,
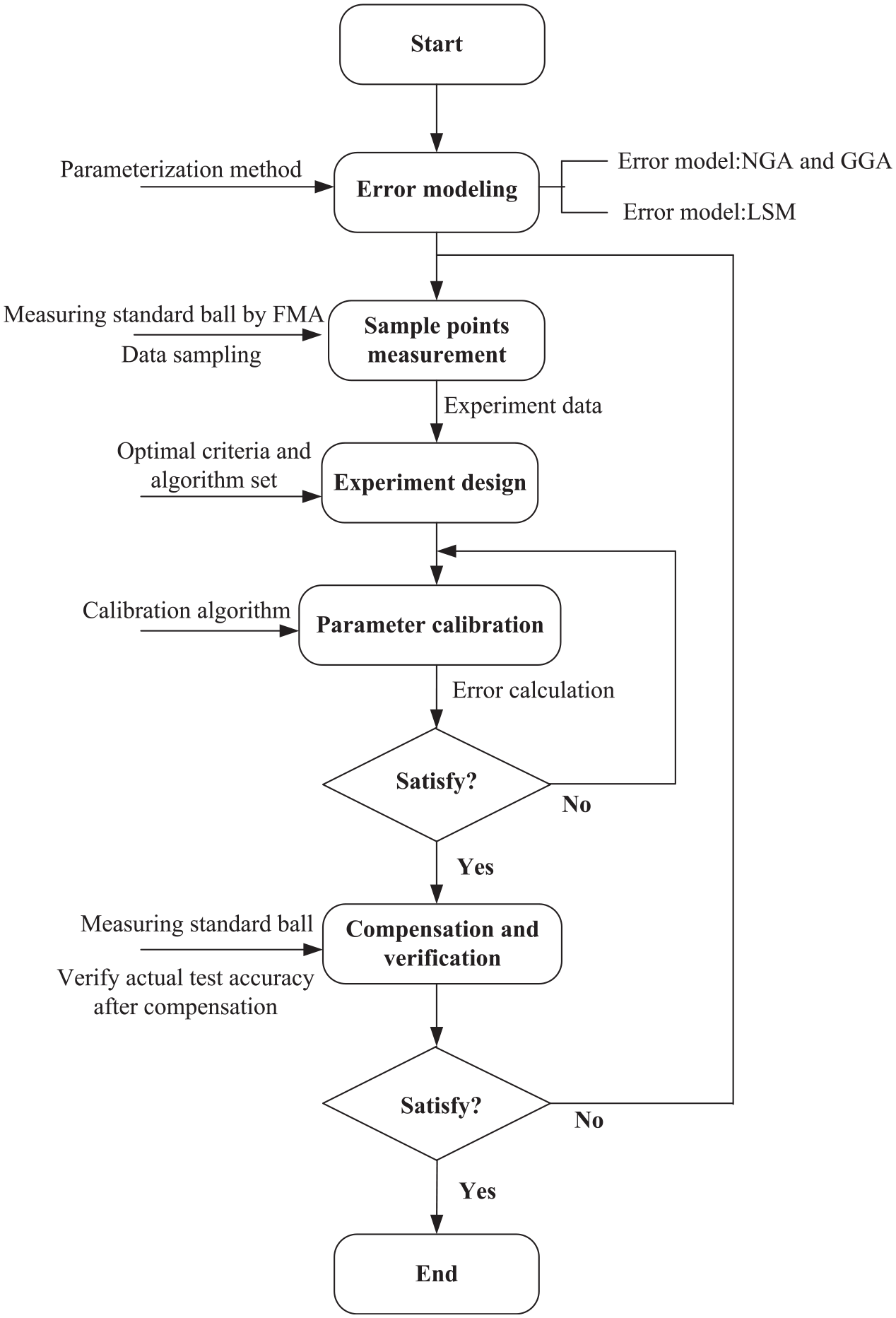
The calibration procedure.
Error calibration results are obtained shown in Table 2. The experiment data indicates that tensional and flexural deformation of joint 0 is less than joint 1. Linear guide rail (joint 0) which is fixed on the foundation can greatly enhance the ability of deformation resistance. It is helpful to reduce the error amplification effect which from the joint 0. Then the deformation of platform shown in Figure 2 is much smaller than other joints. Sealed turntable can further improve the accuracy.
Error calibration results of the three algorithms.
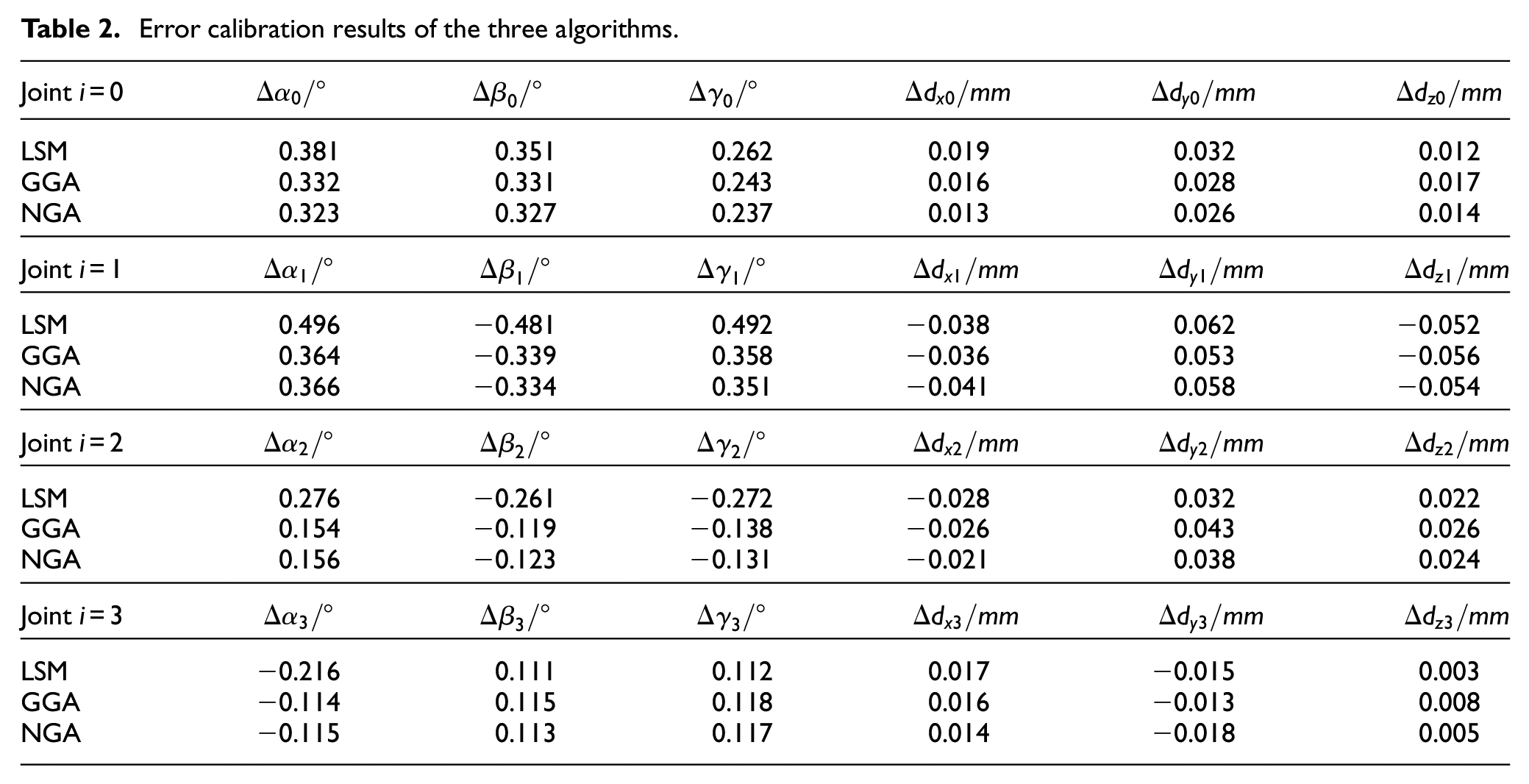
The performances of the three algorithms are obtained shown in Figure 8. It obviously indicates that LSM is not suitable to identify angle error especially for rotational joint according to Table 2. Its calibration results are greatly different with GGA and NGA, and the calibration accuracy with LSM is much poorer.
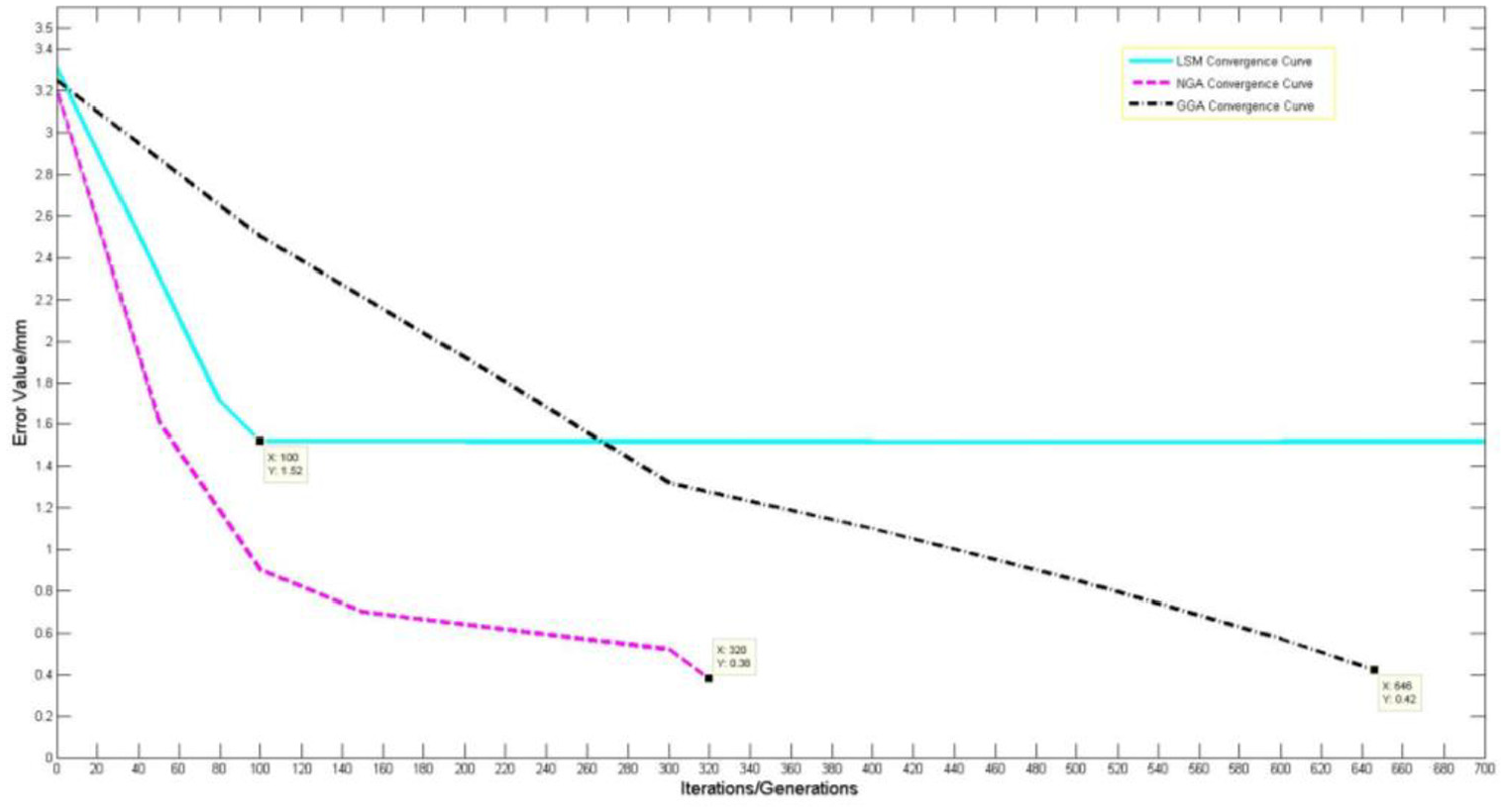
Convergence performance of the three algorithms.
LSM owns the best convergence speed from Figure 8. But the compensation accuracy is only 1.52 mm because the Jacobin matrix become ill-condition after 100 iterations and it stops convergence. Huang et al. 18 has proved that the initial iteration values of LSM design the convergence performance and calculation accuracy. However, it is impossible to get the best initial values before calibration. Therefore, the numerical algorithms have been widely applied and solve the problem of LSM. The proposed NGA meets the accuracy requirement just after 320 generations, and its convergence speed is two times of GGA. Although GGA also completes the optimization calculation, its compensation accuracy is 0.42 mm which is less than that of the proposed NGA. Its convergence speed is also obviously slower than proposed NGA.
Validation of calibration method
Compensation vector has been obtained shown in Table 2, and 75 points are measured again on a standard ball. Firstly, we record the theoretical points’ coordinates in system. Then the actual measurement error of these points will be calculated by equation (11) before and after compensation. Its distribution on the standard ball is shown in the following Figure 9.
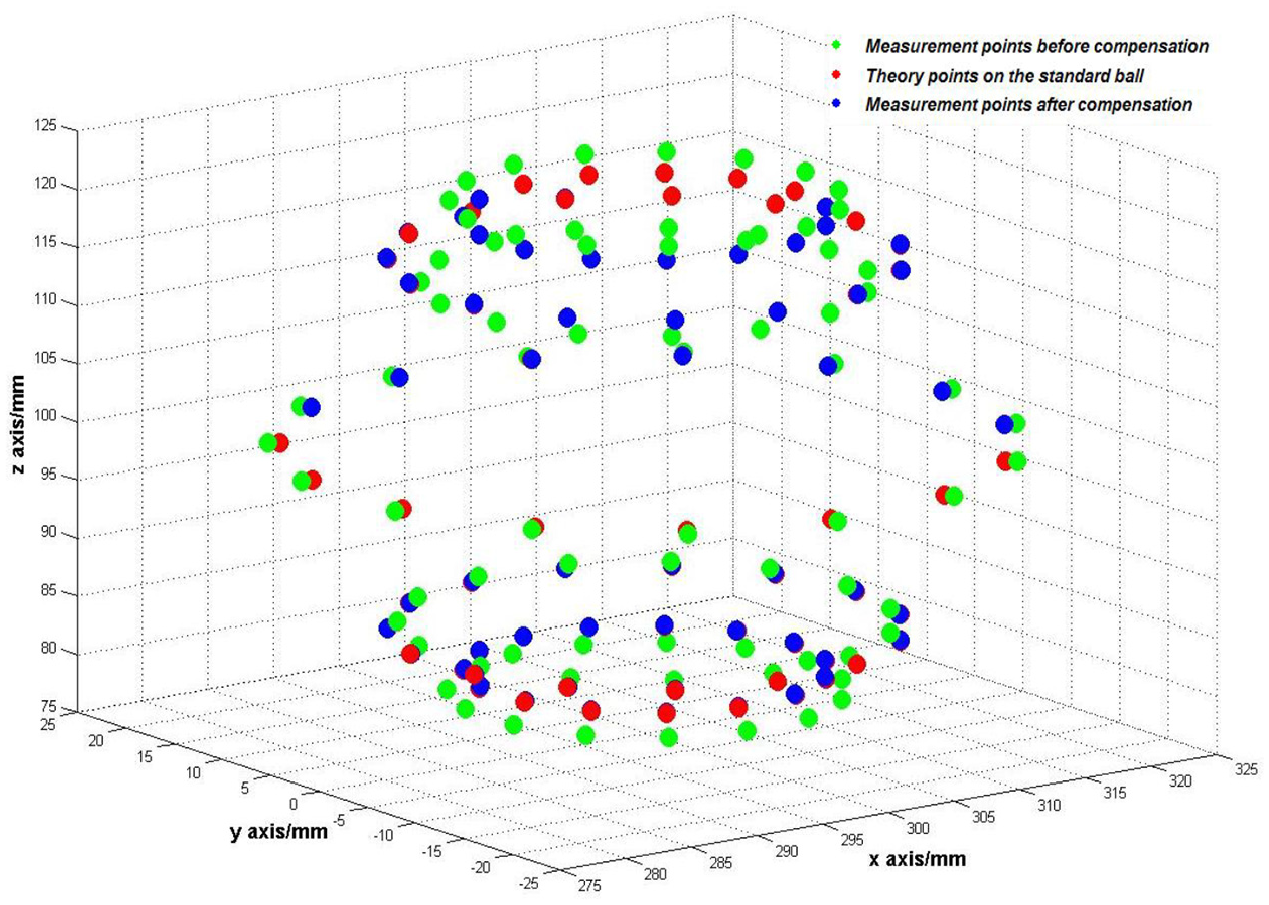
Measurement points on the standard ball before and after compensation.
Finally, we can obtain error curves about test points before and after compensation. In order to analyze the accuracy and calibration effectiveness, the position errors are given out at the three directions of x, y, and z shown in Figures 10 to 12.
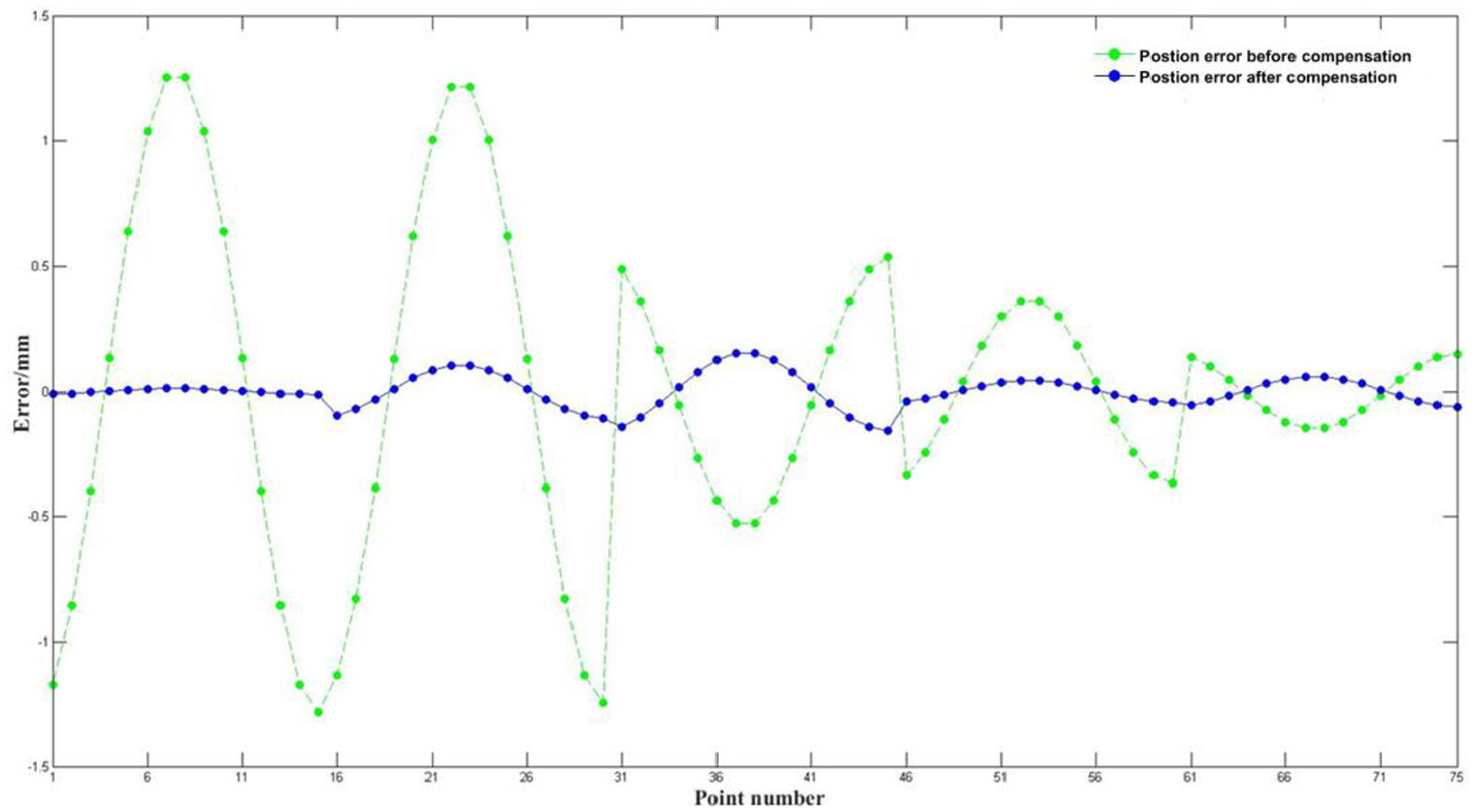
Position error at the x direction.
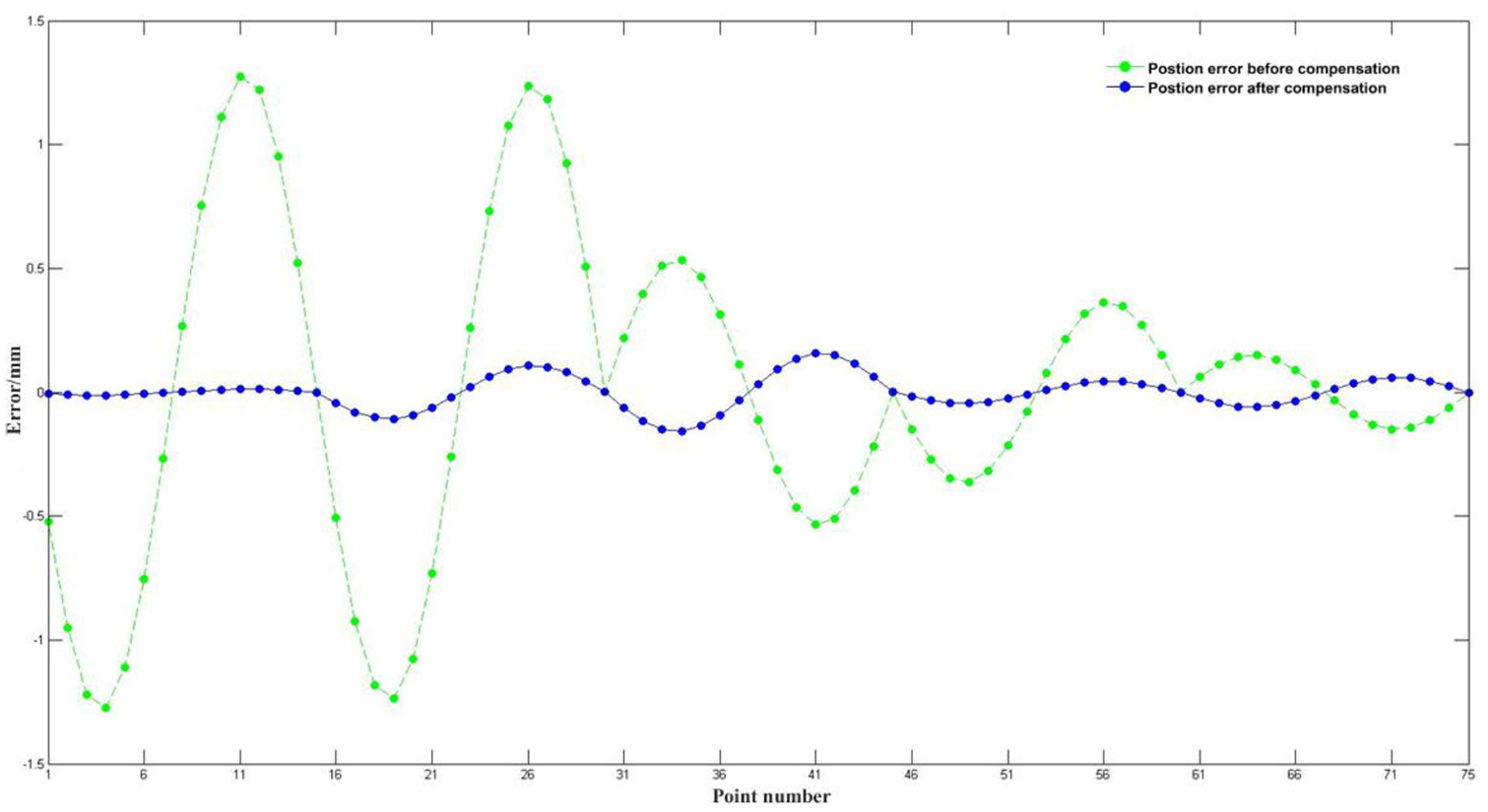
Position error at the y direction.
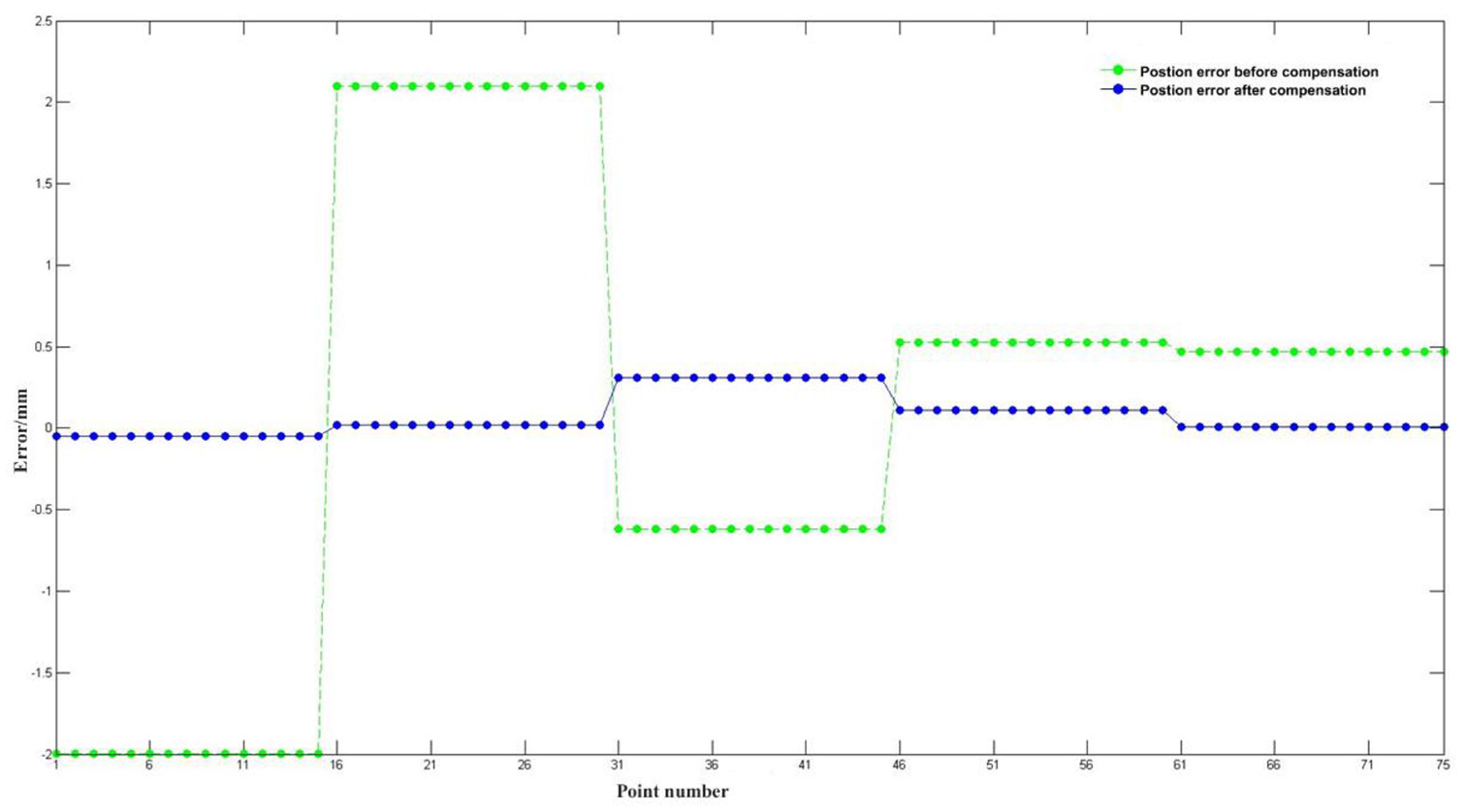
Position error at the z direction.
It is obviously that all the measurement points’ error is controlled at −0.50 to 0.50 mm after compensation. Figures 10 to 12 indicate that the curves after compensation are smoother than that before compensation. It also illustrates that the stability of motion is enhanced greatly. An obvious error spike occurs at plane 3 which indicates that FMA owns better accuracy at plane 4 and plane 5 in workspace. The max error at z direction reaches 2.13 mm, and the error at x and y direction is less than that at z direction which indicates that the linear guide with high stiffness can effectively restrain the torsion deformation. However, the deflection deformation of mechanism is relatively serious because of the affection of gravity. It results in the z-direction error being significantly greater than that in X and Y direction.
In addition, it is not difficult to find that the error’s trend at the three directions becomes smaller with the number incensement of plane. When the researched FMA realizes the detection through the z direction linear guide motion, the deflection deformation at the top of guide is the largest because of structure weight. Therefore, it reduces the deformation error when the mechanism moves to the z-axis negative direction alone z-direction linear guide. When the measured object volume is small, FMA should complete the test work by rotating the rational platform shown in Figure 2, which is helpful to improve the accuracy. Figure 13 shows the final actual error curve before and after compensation.
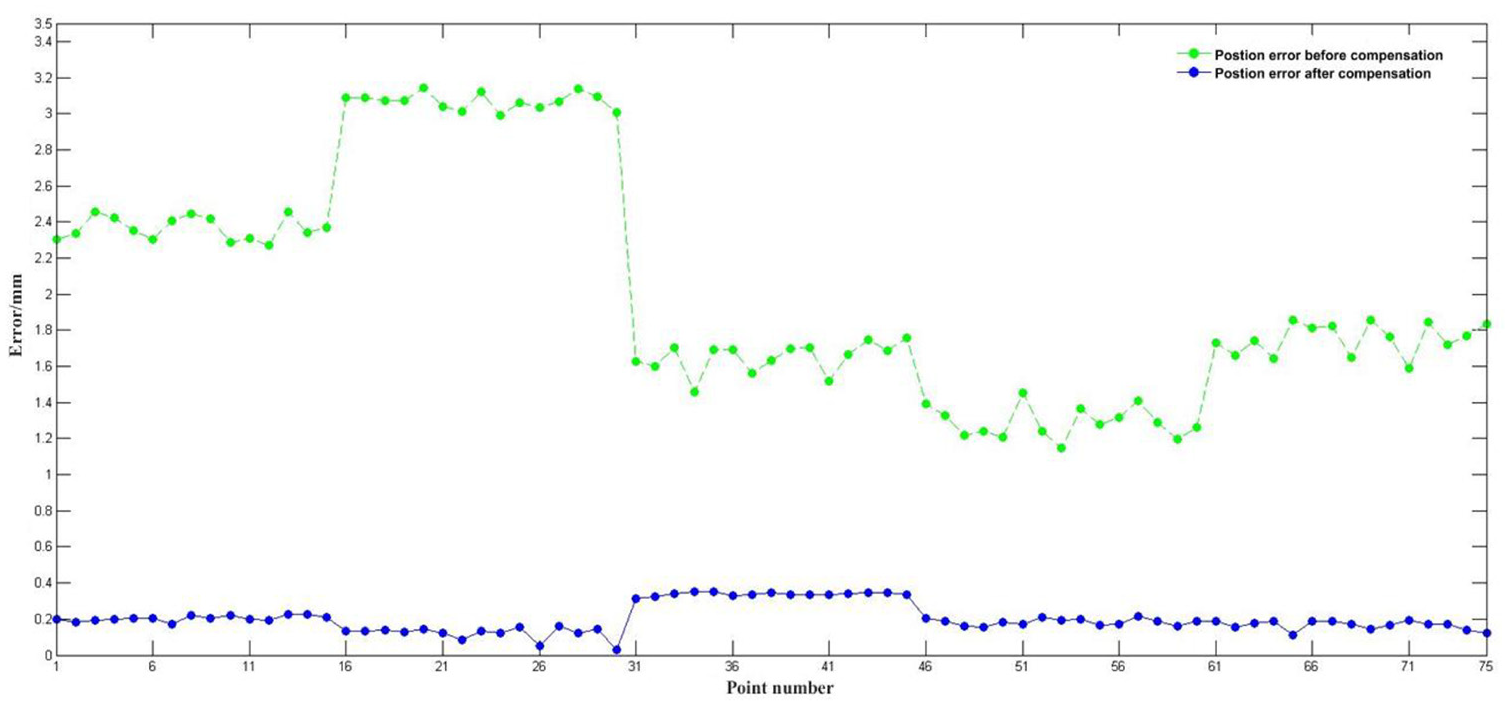
Position error after compensation.
The max position error in these 75 points is up to 3.17 mm before compensation. Its absolute error is less than 0.5 mm after compensation. The compensation accuracy has achieved the accuracy requirement. In addition, error peaks are significantly eliminated and the curve after compensation is much smoother. It also indicates that the motion is stable during the automatic test process. The proposed method effectively solves the problem of low detection accuracy for this kind of system. This calibration work greatly reduces the cost and owns high efficiency. But the proposed calibration method needs to ensure that the probe has high detection accuracy, which is at least higher than the accuracy requirements.
Conclusions
In this article, a fast calibration method is proposed for FMA which is widely used in industry. The proposed method just needs several standard balls and a ball plate. The calibration work is completed automatically by software integrated with the algorithms proposed in the paper. It owns high efficiency and low cost. The GGA is optimized and an adaptive mechanism is introduced to algorithm which realize the adaptive adjustment of important genetic operators. It effectively solves the problem that the number of optimal individuals and the fitness of the population are poor after cross and mutation with fixed operators. Therefore, the convergence speed of the algorithm has been greatly improved.
Experiments have proved that linear-guide is helpful to improve the torsion and bending deformation. The max error at the x, y, and z axis is 1.32, 1.35, and 1.91 mm because the influence of the weight of joint structure leads to the maximum deflection of FMA at the top of plane 1. The result is consistent with the actual application and structural mechanics analysis. The max position error reaches 3.17 mm before compensation, and the absolute error of FMA is less than 0.5 mm after compensation with the proposed calibration method. The proposed NGA greatly improves the global research performance than GGA. Its convergence speed is almost two time of GGA. NGA quickly realizes the calculation and meets the accuracy requirement just after 320 generations. Its convergence rate is two times of GGA. The compensation accuracy with LSM is only 1.52 mm because the Jacobin matrix becomes ill-condition which leads to convergence stop. It indicates LSM is not fit to solve calibration with much data calculation for non-linear system. The proposed method is universal and can be extended to other FMAS with different structures. Its effectiveness and feasibility have been verified by experiments.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the National Key Research and Development Program (2017YFB1303502), National Natural Science Foundation of China (51975412), and Tianjin Natural Science Foundation of China (18JCYB JC87900).