
Abstract
This paper focuses on the robust parameters estimation algorithm of linear parameters varying (LPV) models. The classical robust identification techniques deal with the polluted training data, for example, outliers in white noise. The paper extends this robustness to both symmetric and asymmetric noise with outliers to achieve stronger robustness. Without the assumption of Gaussian white noise pollution, the paper employs asymmetric Laplace distribution to model broader noise, especially the asymmetrically distributed noise, since it is an asymmetric heavy-tailed distribution. Furthermore, the asymmetric Laplace (AL) distribution is represented as the product of Gaussian distribution and exponential distribution to decompose this complex AL distribution. Then, a shifted parameter is introduced as the regression term to connect the probabilistic models of the noise and the predict output that obeys shifted AL distribution. In this way, the posterior probability distribution of the unobserved variables could be deduced and the robust parameters estimation problem is solved in the general Expectation Maximization algorithm framework. To demonstrate the advantage of the proposed algorithm, a numerical simulation example is employed to identify the parameters of LPV models and to illustrate the convergence.
Introduction
The modern industry is developing fast, and systems of various industrial processes become larger and the internal relations become more complex. 1 Establishing accurate processes’ models is the foundation of control, fault diagnosis and condition monitoring, and therefore higher requirements are put forward for the precision of modeling.2–4 As a result, many existing researches focus on the complex process modeling techniques with complex structure, strong dynamic characteristics and strong nonlinearity in modern industrial process control. 5 Linear parameter varying (LPV) systems attract much attention since this has a simple linear structure and variable parameters, and therefore can model complex and time-varying processes. In addition, based on LPV systems, many controllers have been studied to achieve stable and robust control.6,7
Because of its simple structure, the least square estimation method can be employed to identify the parameters of the most classical LPV models. However, this requires high quality training data, which is almost impossible in practice. As for the state space LPV models, the various parameters identification problems have been studied. For instance,
8
proposed the parameters estimation algorithm to identify state space LPV models and the identification approach of multiple-input single output systems with time-delay was proposed in Yang et al.
9
In addition, to reduce computational cost, Turk, Gillis, Pipeleers & Swevers proposed the regularization method, and used
As for the single input and single output systems, many research focuses on the robust identification problems and addressing various challenges posed by the training data.10–12 For example, sensors hardly collect all the information roundly and accurately. Therefore, the algorithm that can estimate the parameters when output measurements are randomly missing is proposed in Yang et al.
13
and Liu et al.
14
Output-error (OE) structure is employed in Yang et al.
15
as the linear structure of LPV models that has the advantages and flexibility to model various noise, and proposed a robust parameters estimation method to identify the parameters when the training data is polluted by outliers and the system has time delays. Moreover, when it comes to the LPV piecewise systems,a membership recognition method is proposed in Hamdi et al.
16
In practice, because of the different working environments, different types of sensors are usually employed and therefore the sampling frequencies may be also different. To solve this, the dual-rate parameters estimation approach is proposed in Yang and Yin
17
in which the LPV systems can be identified under the expectation maximization framework. Among these researches, Bayesian approach is of significance, and therefore the probabilistic models definitely determine the identification ability. For example, compared with Gaussian distribution, Laplace distribution and Student-T distribution are employed to model the noise since they are heavy-tailed distributions, and therefore the system identification algorithms developed based on these are robust to the outliers.
18
However, heavy-tailed distributions are not perfect since they can only model the outliers compared with Gaussian distribution. In practice, there are not only outliers but also all kinds noise in the training data, for example, asymmetric noise. To be more specific, these probability distributions are symmetric about the vertical axis (
The work based on the asymmetric distribution can model both the asymmetric and symmetric noise. Compared with Gaussian distribution, the asymmetric Laplace distribution is a heavy-tailed distribution. Thus, the algorithm studied based on this is robust to outliers. In addition, asymmetric Laplace distribution is different from Laplace distribution. Specifically, Laplace distribution is a special type of asymmetric Laplace distribution, the symmetric form. Thus, asymmetric Laplace distribution can model more general noise and therefore has stronger robustness. However, the application of asymmetric Laplace is still challenging because of the complex structure. Therefore, the expectation maximization (EM) algorithm framework is employed, and the LPV system identification algorithm can be deduced. To sum up, the contribution of the paper is summarized as follow:
A more robust parameters estimation method of LPV models is proposed. The algorithm identifies the parameters when the training data are polluted by both symmetric/asymmetric noise with outliers.
The noise is modeled by a more general probabilistic model, asymmetric Laplace distribution, which can both model the symmetric and asymmetric probabilities. In order to utilize the asymmetric Laplace distribution in parameters estimation, the asymmetric Laplace distribution with a shifted parameter is represented as the product of an exponential distribution and a normal distribution, and the posterior probability distribution of the random variable that obeys the exponential distribution is deduced.
The EM algorithm is utilized to deduced the parameters estimation algorithm. The random variable that obeys the exponential distribution is treated as the latent variable in the EM algorithm, and therefore the asymmetric Laplace distribution can be possible to model the noise.
The rest part of the paper is organized as follow. The LPV system identification problem is described in Section II, and the properties of asymmetric Laplace distribution are also introduced. In Section III, the parameters’ estimation algorithm of LPV models is deduced under the EM algorithm framework, and the EM algorithm is briefly introduced at the beginning. To illustrate the robustness and advantages of the proposed algorithm, the numerical example is present in Section IV. Finally, the conclusion is given in Section V.
Problem formulation
The LPV–OE model
The proposed algorithm focuses on the identification of LPV models, and the local models are output error (OE) models. The LPV–OE models are defined as equation (1).

where

The transfer function

The polynomial
Normally,
where
The LPV–OE models that defined by equations (1)–(5) can be rewritten in equations (6)–(8), the autoregressive form.

where
The aim of this paper is to identify the parameters of LPV–OE models,
Asymmetric Laplace distribution
The probability density function of a p dimensional random variable that obeys centralized asymmetric Laplace (CAL) distribution is shown in equation (9).
where,
However, CAL distribution cannot be utilized in clustering and system identification directly because CAL distribution forces all components connecting at the same region. Thus, by considering the shift parameter
where
To illustrate the asymmetry of SAL distribution, the probability density function of the SAL distribution with skewness
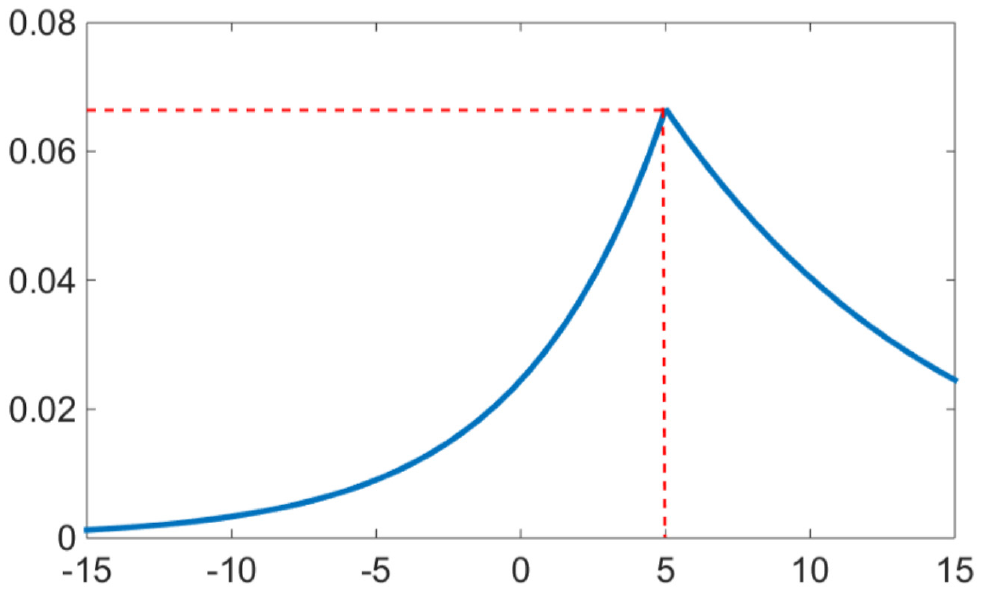
The probability density function of the SAL distribution.
However, because of the complexity of SAL distribution, it still cannot be utilized directly like Gaussian distribution.
19
has studied SAL distribution in detail that the random variable

where Z obeys exponential distribution with rate parameters
Thus, the random variable

In other words, the random variable that obeys SAL distribution ultimately obeys normal distribution when the random variable z is observable.

In the system identification problem described in Section, the noise obeys the CAL distribution, and therefore, the output obeys the SAL distribution with
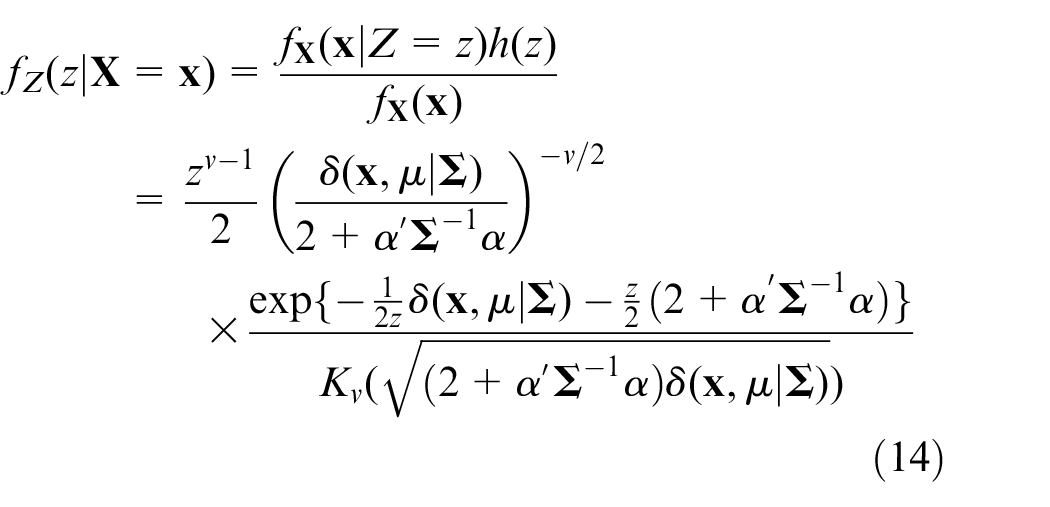
It can be seen that equation (14) is fundamentally Generalized inverse Gaussian (GIG) distribution with


where
Robust parameters estimation algorithm for LPV–OE systems
Brief introduction of the EM algorithm
The EM algorithm is an iterative method of the maximum likelihood estimation problem and its flexibility to deal with the missing part (hidden state) attracts wide attention. In the EM algorithm, Expectation step (E-Step) and Maximization step (M-Step) run alternatively until convergence. In the E-Step, the conditional expectation of the log likelihood function with respect to the latent state is calculated. In addition, in the M-Step, the conditional expectation that calculated in the E-Step is maximized. Several methods have been studied to achieve it, including the Newton-Raphson method, Derivative analysis, etc. The procedures of the EM algorithm is summarized below:
(1) Initialization. According to the identification target, the complete data set and the parameters to be estimated are divided into observable data set
(2) E-Step: The conditional expectation of the log likelihood function with respect to the latent state.

(3) M-Step: Maximize the

(4) Let
Mathematical formulation of the robust parameters estimation approach
The data-driven system identification algorithm is proposed in order to estimate the parameters of LPV–OE systems. Compared with mechanism models, the proposed algorithm only utilizes limited prior knowledge and the input-output data to establish the process models. However, there is too much information that need to be identified, for example, the model orders and parameters, the meromorphic functions, etc. The paper emphasizes on the parameters estimation, thus, some information about the structures of LPV–OE models is assumed to be known or fixed a priori.
Under this assumption, the only information to be determined is the parameters of models if the structures of LPV–OE models have been identified or known. Thus, by using the collected input and output data, estimating the parameters of LPV–OE models is the emphasis. In particular, the difficulty of identification depends on the quality of the collected data. In this section, the robust parameters estimation algorithm will be studied and introduced in detail, and the robustness to outliers and asymmetric noise will be illustrated.
As a statistical learning method, the proposed algorithm will be formulated based on the EM algorithm framework. The data-driven parameters estimation algorithm identifies the parameters of LPV–OE systems by extracting the features from input
E-Step: Firstly, the likelihood function of all data set including observed and unobserved variables
where
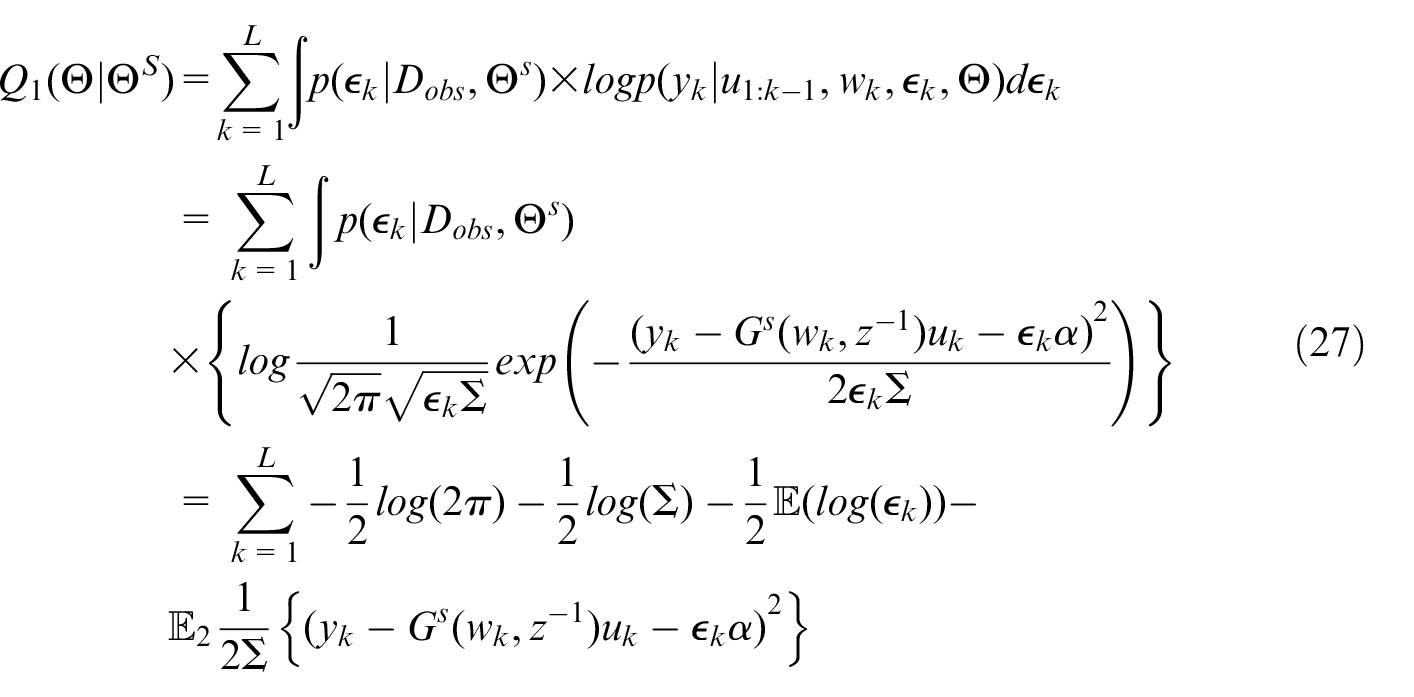
The Q-function in the EM algorithm, conditional expectation of the log-likelihood function with respect to the latent variables, can be represented by equation (21).
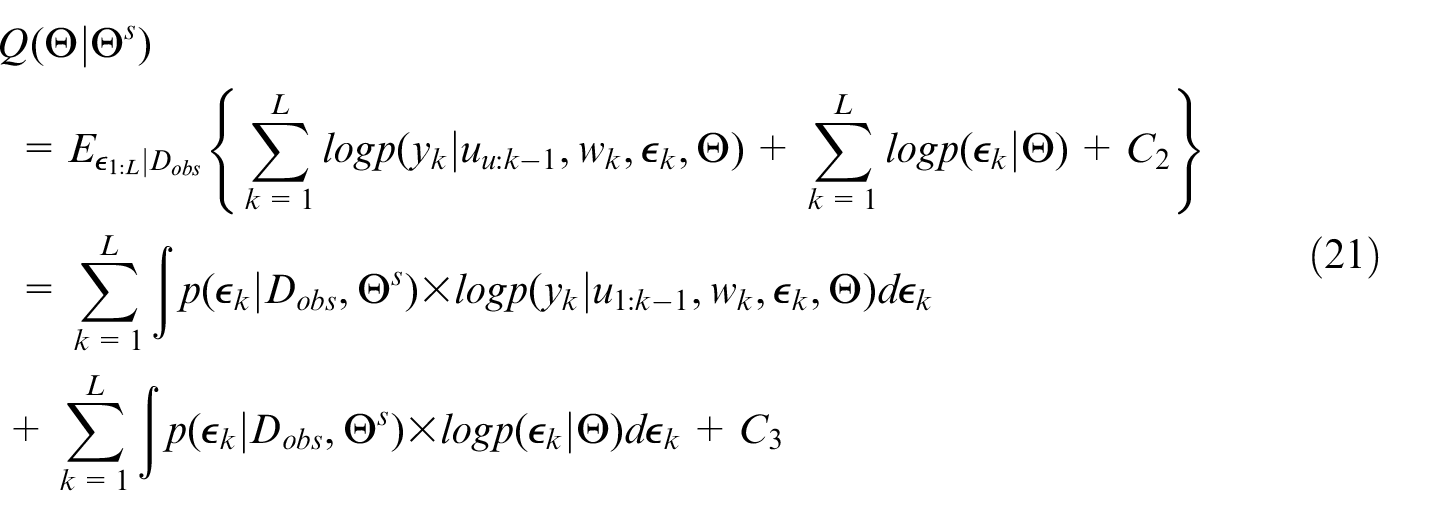
In order to deduce the Q-function, the unknown quantities in equation (21) have to be studied, including
The posterior probability distribution of the latent variable
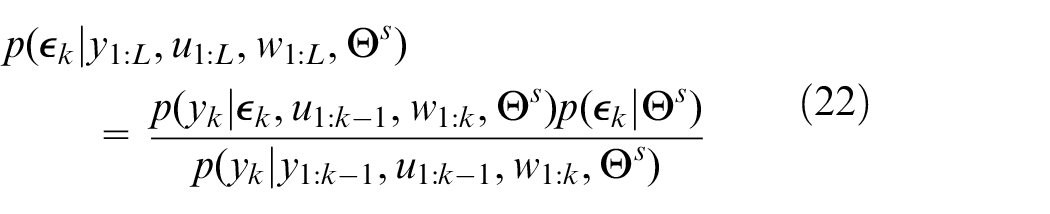
It has been introduced in detail in Section that the SAL distribution can be reduced to Gaussian distribution when the latent variable
When it comes to the condition that the latent variable cannot be observed, the output data obeys SAL distribution of which the probability density function is equation (10), and the random variable
In this way, the unknown items of the posterior probability function of latent variable
where
Comparing equation (24) with the generalized inverse Gaussian (GIG) distribution, it is clear that equation (24) is the GIG distribution with


where
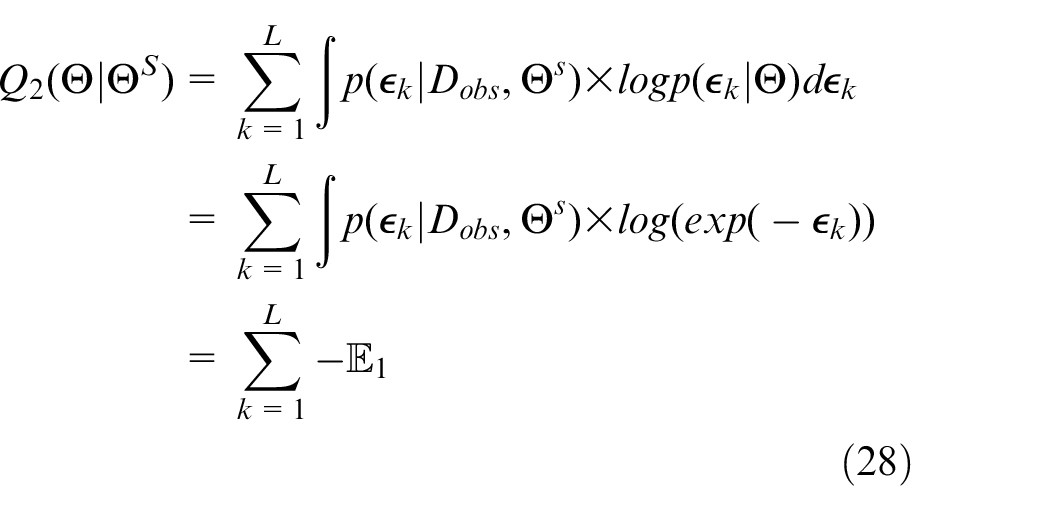
Since all the unknown items in equation (21) have been deduced, by substituting equations (25) and (26) into (21), we can deduce the Q-function. For the sake of presentation, the Q-function is divided into the sum of three terms. In addition, in the M-step in the EM algorithm, the Q-function will be maximized by finding suitable parameters
M-Step: Deducing the iteration formulas of the parameters
In order to deduce the skewness

When it comes to the iteration formula of the parameters of LPV models

where the first-order derivative of


where

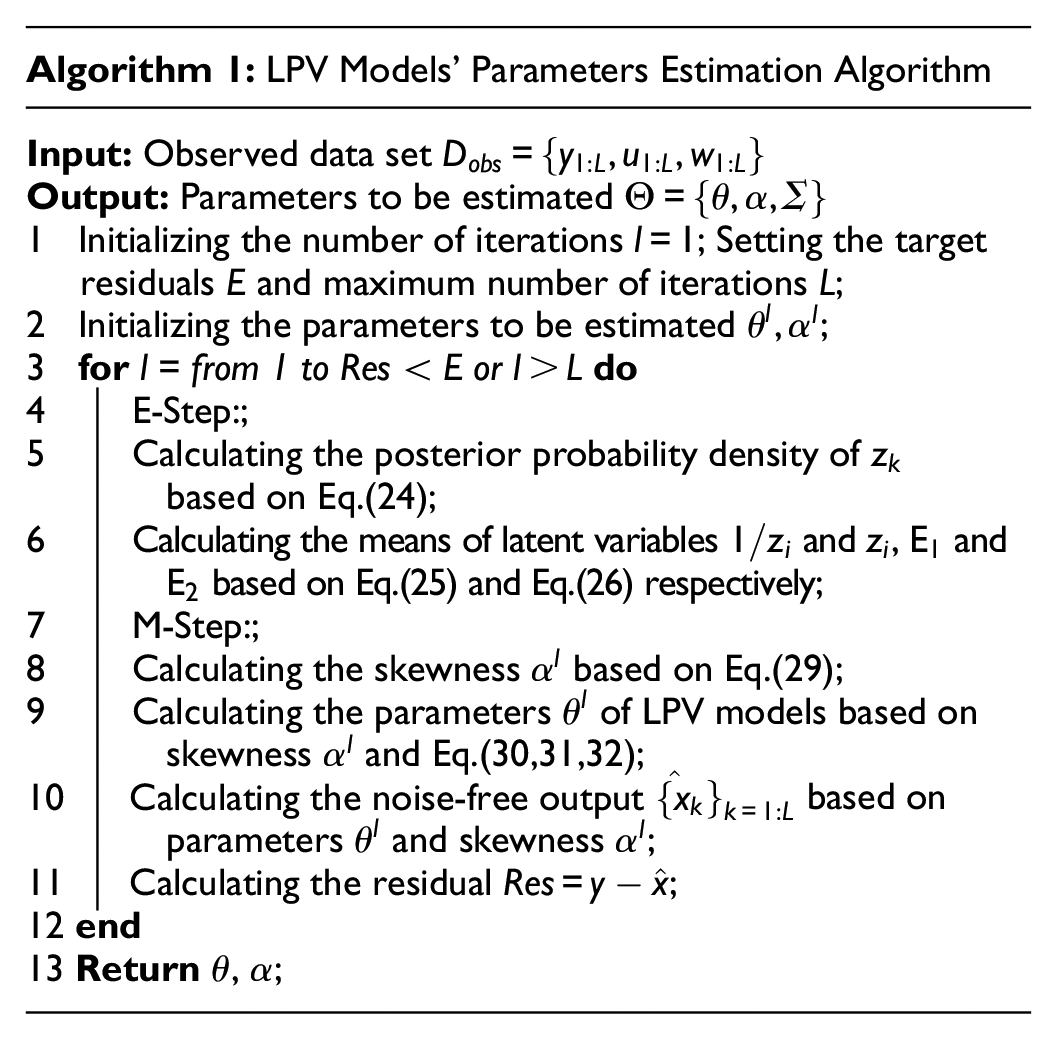
The complete LPV–OE models’ parameters estimation algorithm is summarized as in Algorithm 1.
Simulation example
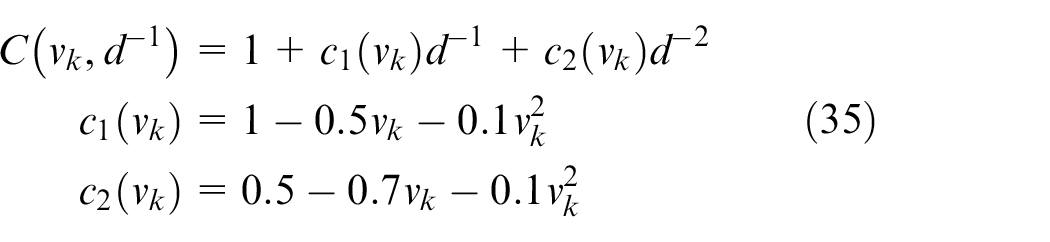
Considering the following LPV–OE model

where
and
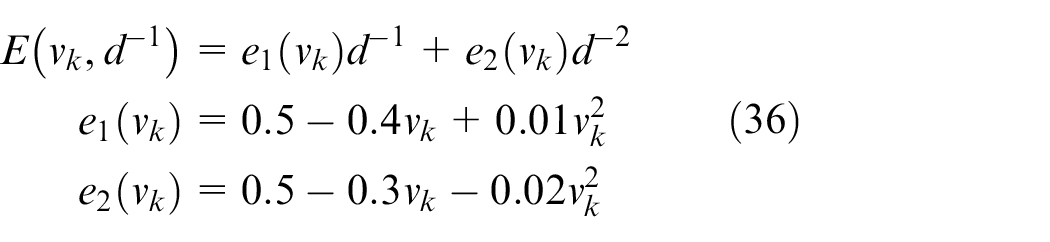
where
In the simulation example, Gaussian white noise is the input signal which is a common and effective input signal when the hardware conditions permit, and it can be utilized to fully simulate the process and obtain the data needed for identification. At the same time, in the single-input single-output system, the input signal is also the scheduling variable immediate
Moreover, outliers are common in the practice. Since the SAL distribution is a special type of Laplace distribution, the proposed algorithm is also robust to the outliers. Thus, the output data is also polluted by outliers in order to verify the robustness to outliers.
The training data are shown in Figure 2 where 10% of the output data are polluted by outliers that are 10 times bigger than the noise-free output. By using the polluted data and the Algorithm1, the parameters of the LPV–OE model can be identified, and the comparison of the estimated parameters with the ground truth parameters are shown in Figure 3. The convergence procedures of the parameters are also illustrated in it. The value of the parameters at each iteration are shown in blue, and the red lines are the ground truth parameters. In the experiment, with the initialization parameters (2), all the parameters converge to the ground truth values and remain stable after 100 iterations. Thus, the proposed algorithm has local convergence, and it can identify the parameters of LPV–OE models accurately when the training data is polluted by asymmetric noise and outliers.
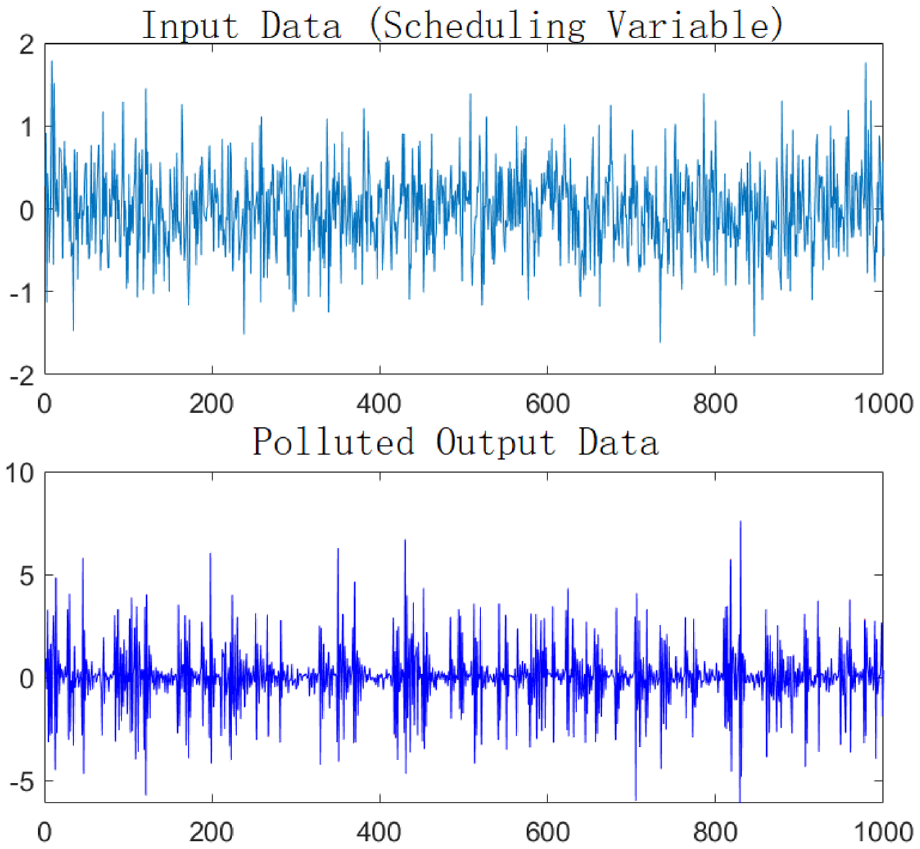
The input data (scheduling variable) and output data.
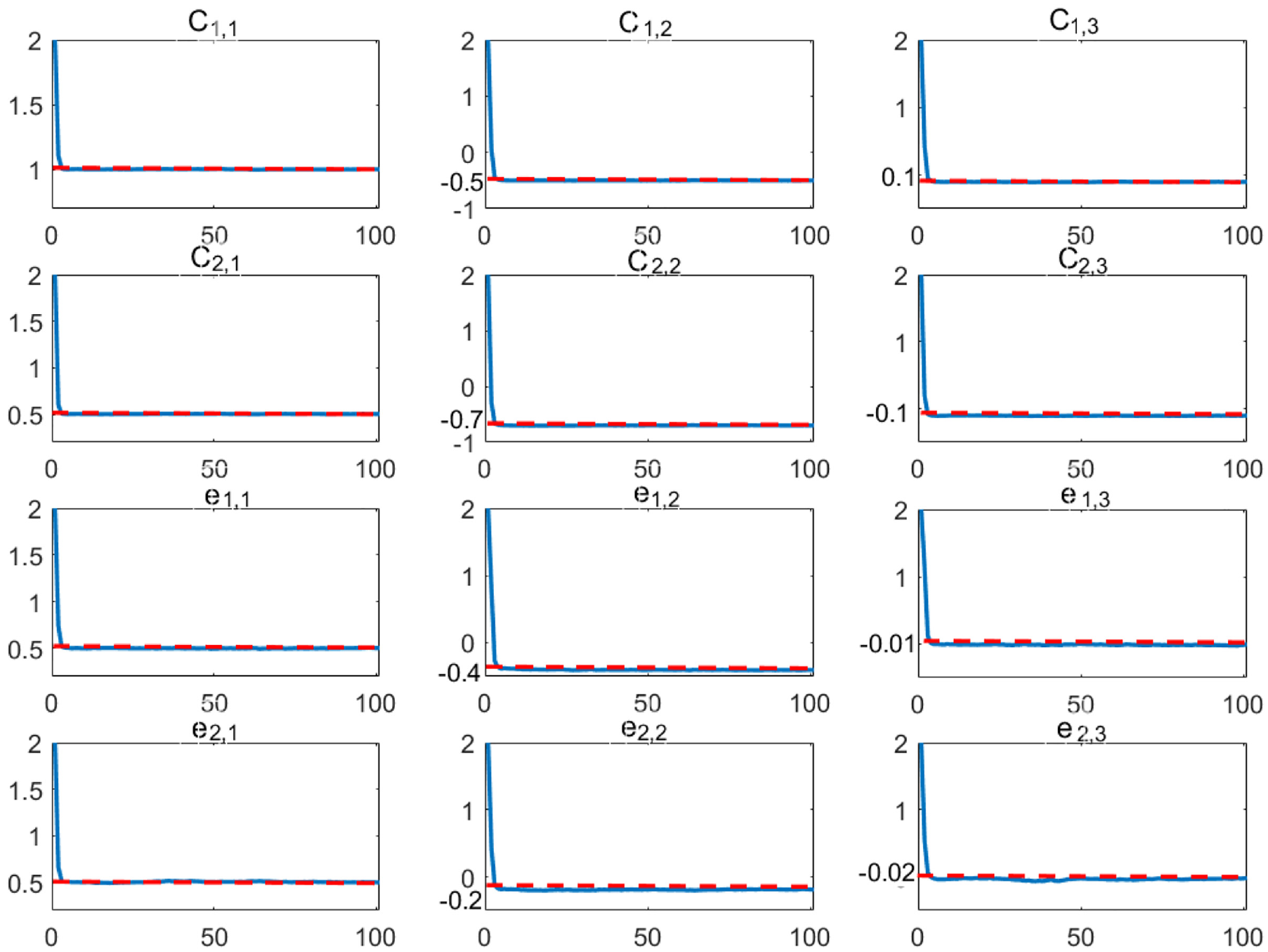
The convergence procedures.
As for the robustness to the asymmetric noise, the item

Most of the robust LPV models identification methods focus on the robustness to outliers but various noise. Specifically, the parameters estimation algorithms are deduced based on Laplace distribution 17 and Student’s T distribution 15 since these two distributions are heavy-tailed distributions. However, they can only model the symmetric noise. If the training data is polluted by asymmetric noise, the estimated parameters are bias. Fortunately, the proposed algorithm is robust to both symmetric/asymmetric noise with outliers.
The numerical example is also employed to verify the robustness to asymmetric noise. In the meanwhile, two parameters estimation algorithms proposed in Yang and Yang 21 and Liu et al. 22 are employed when the training data is polluted by asymmetric noise with outliers. The first algorithm is deduced based on Gaussian distribution. Thus, the algorithm is not robust. In the second algorithm, Laplace distribution is employed to model the noise. So, the algorithm is robust to the outliers. However, these two algorithms are not robust to asymmetric noise. The parameters identified by the three algorithms as well as the ground truth parameters are shown in Table 1.
The comparison of estimated parameters with true parameters.
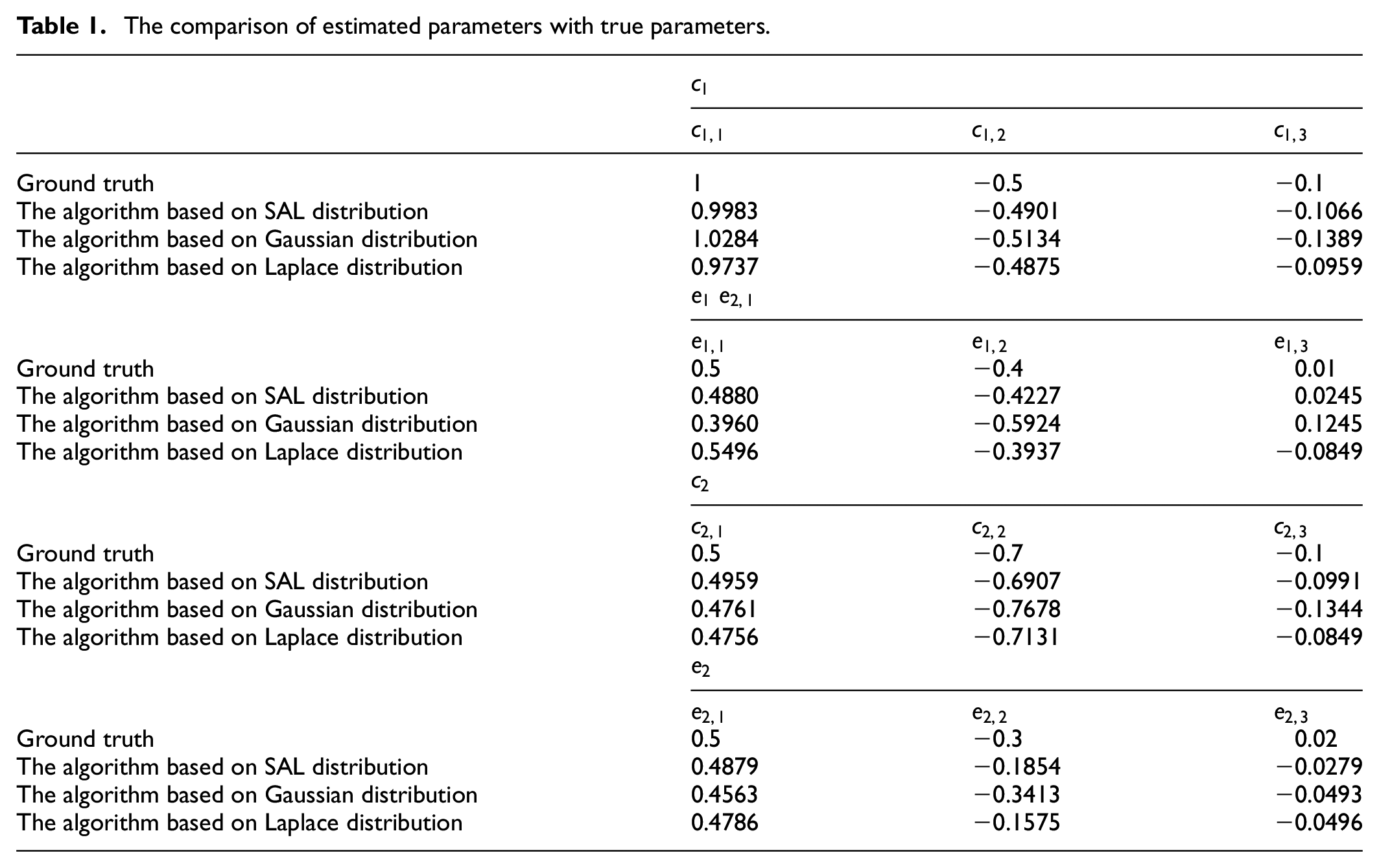
From the results, it can be seen that the performance of the proposed algorithm is better than the other two algorithms. The robustness of the algorithm based on Gaussian is the worst because Gaussian distribution a symmetric distribution and it cannot model outliers and asymmetric noise in the data. The algorithm based on Laplace distribution performs better than the counterpart based on Gaussian distribution, since Laplace distribution is a heavy-tailed distribution. Its heavy tail can model the outliers in the training data. However, it is still a symmetric distribution, so it is not robust to the asymmetric noise. The histogram of the noise in the numerical example is shown in Figure 4. The vast majority of noise are greater than zero. The asymmetry of this noise cannot be modeled by Laplace distribution but it is common in industries. Fortunately, the CAL distribution can model the noise and therefore, the proposed algorithm has stronger robustness and identifies the parameters accurately.
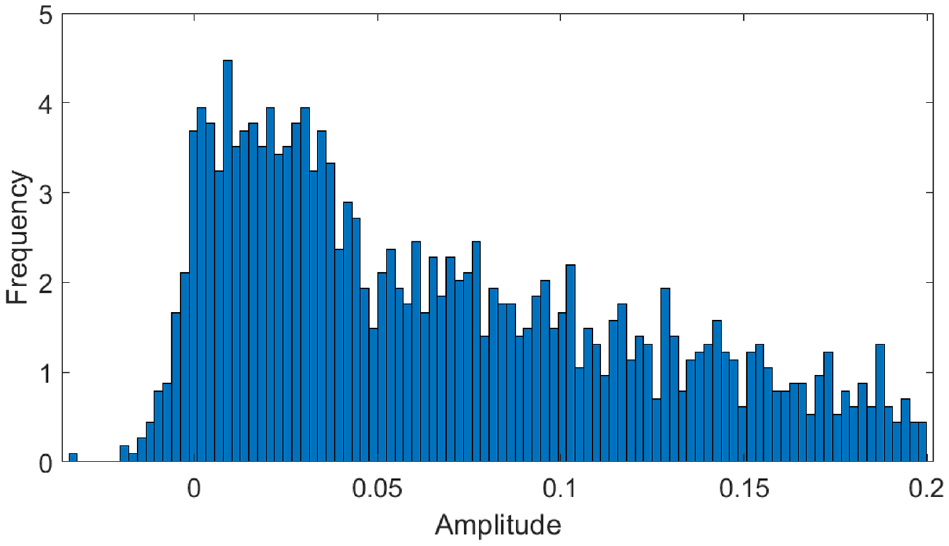
The histogram of the noise.
Conclusion
In the work, the parameters estimation algorithm of LPV–OE models is deduced based on asymmetric Laplace distribution and the EM algorithm. The proposed algorithm is robust to both asymmetric noise and outliers, and the effectiveness of the proposed algorithm is verified by a numerical example.
The advantages of the proposed algorithm come from the asymmetric Laplace distribution. Compared with the Gaussian and the Laplace distribution, the asymmetric Laplace distribution has heavy tail and asymmetry respectively. Thus, it can model more general noise, both the asymmetric noise and symmetric noise with outliers. To make it is possible to utilized asymmetric Laplace distribution, it is represented as the product of exponential distribution and Gaussian distribution. When the random variable that obeys exponential distribution is selected as the latent variable in the EM algorithm framework. The posterior distribution of the latent variable can be deduced and be represented as the structure of GIG distribution. In this way, the parameters estimation algorithm can be deduced. Finally, by using a numerical example, it is verified that the proposed algorithm can identify the parameters of LPV–OE models when the training data is polluted by asymmetric noise and outliers.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Joint Funds of the National Natural Science Foundation of China under Grant U20A20188.