This article studies the parametric design of reduced-order functional observer (ROFO) for linear time-varying (LTV) systems. Firstly, existence conditions of the ROFO are deduced based on the differentiable nonsingular transformation. Then, depending on the solution of the generalized Sylvester equation (GSE), a series of fully parameterized expressions of observer coefficient matrices are established, and a parametric design flow is given. Using this method, the observer can be constructed under the expected convergence speed of the observation error. Finally, two numerical examples are given to verify the correctness and effectiveness of this method and also the aircraft control problem.
In reality, not all state variables can be directly measured, it is for this reason that observers are required to reconstruct the state. As an extension of the Kalman filter in time domain, the observer was first proposed by Luenberger1 in the 1960s. Since then, a large number of studies have gathered here,2,3 and considerable results have been achieved in many aspects, such as fault detection,4,5 robust control6,7 and tracking control.8
Linear time-varying (LTV) system is a type of system whose characteristics change with time, so it can reflect the strong dependence of object characteristics on time more accurately than the traditional time-invariant system. For LTV systems, people have made a series of research results.9–11 In the field of observer design, Trabet et al.12 presented a constructive method to ensure the synergy of observation errors in the new coordinate system to design interval observers. Zhang et al.13 designed an improved high-gain adaptive observer for a class of LTV systems with parameter uncertainties. Li and Duan14 used the observable block adjoint form of augmented LTV systems to propose an observer design algorithm, which simplifies the computational complexity. Tranninger et al.15 presented a cascaded observer structure for LTV systems, which can still obtain accurate state estimation in finite time even with unknown inputs.
The functional observer (FO) aims at observing the linear combination of state variables and has been widely used in practical applications. As a consequence, the design method of FO has become a research hotspot. Xiong and Saif16 put forward two input estimators based on the FO for linear time-invariant (LTI) systems, which can also be used in some non-minimum phase systems. Bezzaoucha et al.17 used the Lyapunov theory to derive the conditions of linear matrix inequalities (LMIs) under the polyhedral Takagi-Sugeno framework and presented a construction method for designing unknown input FO for nonlinear continuous systems. Singh and Janardhanan18 investigated the existence and stability of FO on the basis of Kronecker product and gave a new design method suitable for linear discrete stochastic systems. Huong19 designed a distributed FO for a class of fractional-order time-varying interconnected time-delay systems, which can be used in a wider range of cases. Based on the latest results of the fractional derivative of Caputo of the quadratic function, the design of unknown input fractional FO for the fractional delay nonlinear systems is solved.20 More recent results on the design of FO can be found in Yen and Huong21 and Huong and Yen22 and references therein.
Besides, because the reduced-order observer uses part of the states of original system to obtain all, the advantage that it is easier to practice than full-order has attracted people’s attention. Lungu and Lungu23 designed a new reduced-order observer for LTI systems with unknown input. Rotella and Zambettakis24 proposed an algorithm to design single-FO for LTV systems, and obtained the minimum order of the observer through iteration under the existing conditions. Sundarapandian25 promoted a Luenberger-type reduced-order observer for linear systems and designed it for Lyapunov stable nonlinear systems. Liu et al.26 combined the controller and the reduced-order observer to study the adaptive output feedback control of uncertain nonlinear systems with partially unmeasurable states, which are estimated by a reduced-order observer. Wang and Jiao27 proposed a general adaptive fuzzy smooth dynamic controller to solve the output tracking problem of a class of switched nonlinear systems by designing an appropriate reduced-order observer and introducing fuzzy approximation.
The use of some mathematical methods, including matrix equations, nonlinear equations play a vital role in the establishment and application of control theory and system models.28–31 Zhou and Duan,32 Duan,33 Gu and Zhang,34,35 Gu et al.36,37 studied the fully parameterized solution of homogeneous generalized Sylvester equations (GSEs), and its application in typical control problems such as characteristic structure configuration and observer design, which laid a solid theoretical foundation for control system design. Based on the results of the fully parameterized solution of GSEs proposed in Zhou and Duan,32 this study investigates the problem of state reconstruction for LTV models. The main work is stated as follows.
A low-order Luenberger observer is introduced for asymptotic tracking of functional combination signals of LTV systems, which is easy to understand and implement.
Based on the error dynamic system, the sufficient conditions for the observer system to maintain bounded stability and tracking performance are given, making the state reconstruction problem further developed and improved in theory and practice.
A parameterized design scheme is proposed, in which the gain matrices are calculated by solving the corresponding GSE, and the appropriate parameters are selected to realize the asymptotic tracking of the signal.
Compared with the existing results, the innovation of this paper is mainly reflected in the following aspects. Firstly, a parameterization method is proposed to construct full parametric gain of the observer with simple calculation and high design freedom. Secondly, the design of reduced-order functional observer (ROFO) for LTV system has significant advantages in physical implementation as well as cost-saving and is more in line with the actual observation demand, such as aerospace, process control and other practical problems. Changes of the environment around these systems will lead to the fluctuation of their working conditions in a large range, so the requirements for performance indicators will be very high. When the system parameters are sensitive to the changes of environment, considering the object as a time-varying model can achieve the control purpose more accurately. Finally, the free parameters contained in the gain can be optimized to meet other performance requirements, such as robustness, and can be changed only when the design requirements change.
The rest of this article is summarized below. The problem statement is presented, and some assumptions are given in Section 2. Section 3 puts some preparations to be used in this article. Section 4 lists the relevant results about the design of ROFO, whose effectiveness is verified by the examples in Section 5. Finally, Section 6 concludes the full article.
Problem statement
Throughout the paper, let with being some finite number. We use and to denote the space of -valued functions which are piecewise continuous, and times continuous differentiable on .
The LTV system can be described as
where , is the state, is the output and is the input, respectively. , and are the coefficient matrices.
Lemma 1. Observability Criterion.38The matrix pair of LTV system (1) is observable if there is a finite such that
where
with
Assume that is observable, and define observability index as the least integer such that equation (2) holds, that is,
Let be the estimated vector in the following form
where matrix is given. Following observer system is presented to estimate the estimated vector
where is the observer state, , , , and are real matrices of proper order.
Assumption 1.The of LTV system (1) is observable.
Assumption 2. and are row full rank.
Problem 1.Given system (1) satisfying Assumptions 1 and 2, find the set of system coefficient matrices , , , , and that makes
for arbitrarily given , and .
Preliminaries
Introduce a time-varying transformation
with and , , are bounded for . This transformation transforms system (1) into
where
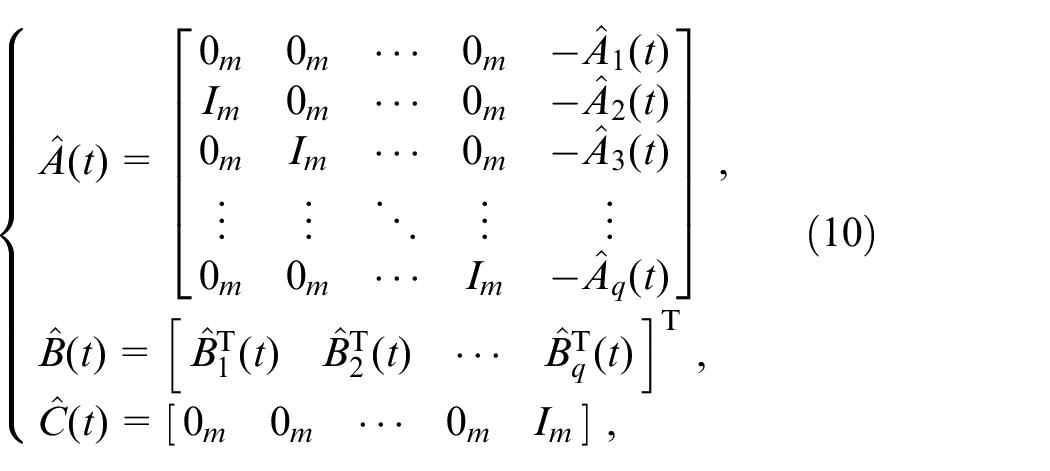
Lemma 2. Shieh et al.39The observable LTV system (1) can be converted to an observable canonical form (8) with the following coefficient matrices
Lemma 3. Trumpf40 and Rotella and Zambettakis41Assume that the LTV system (1) is observable. For arbitrarily given , , and , equation (6) holds if and only if is a Hurwitz matrix and there is a matrix satisfying
Let us introduce the solution to the first-order homogeneous GSE with time-varying coefficients
where , , , and are coefficient matrices, and , are parameter matrices to be solved.
Definition 1. Duan33The pair are called to be left coprime with rank over if the pair are -left coprime with rank for arbitrary , namely,
According to Definition 1, when the rank condition (17) is met, there are unimodular matrices and satisfying
This is well-known right coprime factorization (RCF) of . Further, use to denote the maximum degree of and , then we have
To solve the GSE (16), we present following result.
Theorem 1. Duan33Let , and the pair be -left coprime over . Set and , a pair of right coprime polynomial matrices satisfying (19) and having the form of (20), then for , a general solution to the GSE (16) is
with an arbitrary parameter matrix.
Main results
It is well-known that the full-order observer possesses a certain degree of redundancy. Instead of having to recreate a full-dimensional observer, the output variables can provide state variables. Therefore, according to Lemma 2, we introduce the time-varying transformation (7), convert system (1) into the partition form (8) with coefficients
where , , , , , , , . The new state can be divided into
with the -dimensional and -dimensional output . This implies that can be obtained directly without reconstruction. We only need to design the -dimensional ROFO for the LTV system (1). Furthermore, the estimated vector (4) also can be partitioned into the following form
where , , and .
Remark 1.Observing the scalar linear functional of states may be much simpler than that of the whole. Therefore, Luenberger42firstly proposed a primary result, the upper bound on the order of scalar functional observer is . Correspondingly, when the linear function to be estimated has the dimension of , the order of the multi-functional observer is , and as a result of the above discussion, it will be less than , where represents order of the -th scalar FO. It is also noted that for any fully observable system, there is holds, and in most cases is much smaller than , then is possible, otherwise, will be the order of the minimum-order observer. In other words, the upper bound of the order of multi-functional observer is equal to the smaller of and , but in either case, it will constitute a ROFO of LTV system (1) and have the unified form as shown in (5).
Existence conditions for ROFO system
For the transformed system (22), sufficient conditions for the existence of ROFO can be deduced in the following theorem with block forms.
Theorem 2.Assume that system (1) satisfy Assumptions 1 and 2. Then, the system (5) is a ROFO with -order for the transformed system (22) if is a Hurwitz matrix, and there exits a block matrix with and satisfying
and
Proof. By deducing Lemma 3, the observer (5) of system (22) exists when the following conditions are met
Then substitute corresponding matrices with the ones defined in system (22), and we can get equations (25)–(29). The proof is completed.
Parametric form of observer gain
Based on Theorem 2, we propose existence conditions of ROFO for LTV systems. In this subsection, completely parameterized expressions of the gain matrices of the ROFO are established by using the parametric solutions of the GSE proposed above, and the following theorem is given.
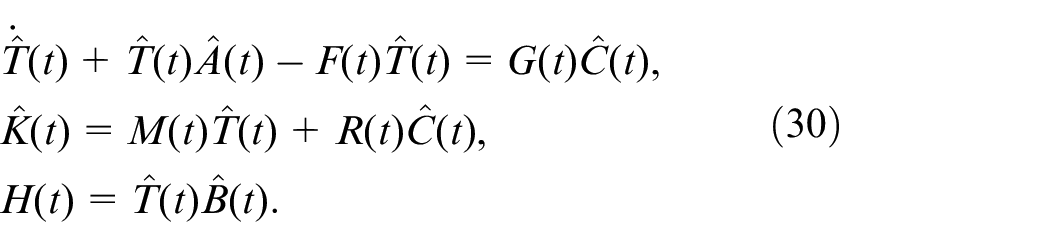
Theorem 3.Assume that system (1) satisfy Assumptions 1 and 2, is an arbitrary Hurwitz matrix. Further, preset right coprime matrices and in the form of (20) and satisfying (19), with , . Then, coefficient matrices of the ROFO (5) with -order can be parametrized as
substituting the above two relations into (39) to get
Using the expressions in (32) and (37), we obtain
This indicates that the parametric solutions of and represented by (32) satisfying (37). Then, equation (33) indicates (35). Combining equations (25)–(29) yields (31). Particular, the matrix is determined by (29), and it is solvable if and only if
which can be guaranteed by the free parameter . This completes the proof.
Remark 2.In the framework of LTV systems, Theorem 3 gives all the observer gains that meet the most basic requirements, where there exists the free parameter , and because of its existence, the above condition (42) is easily satisfied.
Remark 3.It is easy to infer that the performance of the observer is determined by the matrices and , and the Hurwitz matrix can be arbitrarily selected from Theorem 3 to determine the observer error system. In the design process, if the degrees of freedom still exist, the matrix can be designed to determine the observer.
Remark 4.Although there are many matrices involved in the design process, the only ones that can be selected arbitrarily are the Hurwitz matrix and the parameter matrix that makes (42) true. Once these two matrices are determined, others can be represented by related parameters to construct the observer.
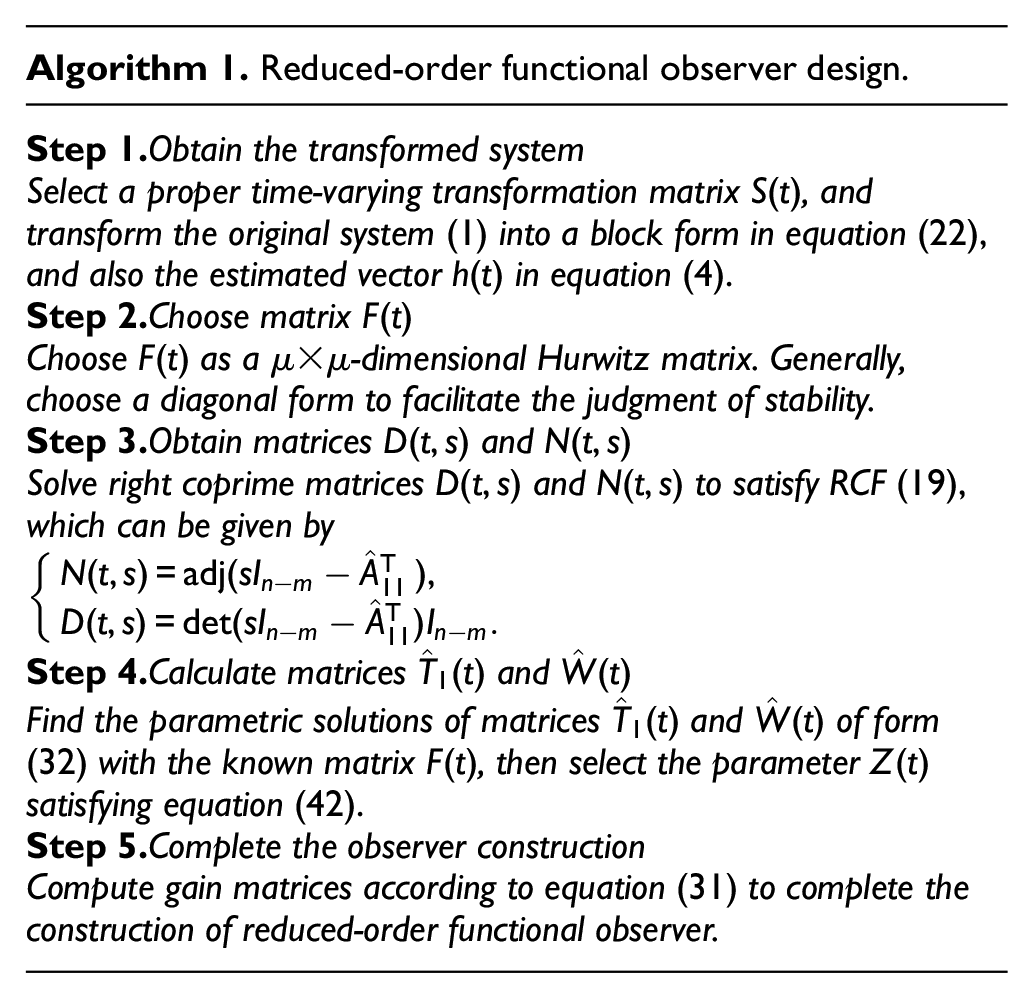
Design algorithm
Based on the above derivation, we propose the following algorithm for parameterized design of a ROFO of LTV system (1) in the form of system (5).
Remark 5.By selecting the matrix , the convergence rate of the observation error can be controlled, so that the error dynamic system can be transformed into a linear one with the desired characteristic structure.
Remark 6.The main advantages of the proposed approach are all degrees of freedom are provided by . When satisfying the condition (34) does not exist, we can add the order of observer to offer more sufficient degrees of freedom to ensure the existence of the solution.
Step 1.Obtain the transformed system Select a proper time-varying transformation matrix , and transform the original system (1) into a block form in equation (22), and also the estimated vector in equation (4). Step 2.Choose matrix Choose as a -dimensional Hurwitz matrix. Generally, choose a diagonal form to facilitate the judgment of stability. Step 3.Obtain matrices and Solve right coprime matrices and to satisfy RCF (19), which can be given by Step 4.Calculate matrices and Find the parametric solutions of matrices and of form (32) with the known matrix , then select the parameter satisfying equation (42). Step 5.Complete the observer construction Compute gain matrices according to equation (31) to complete the construction of reduced-order functional observer.
Examples
Numerical simulation
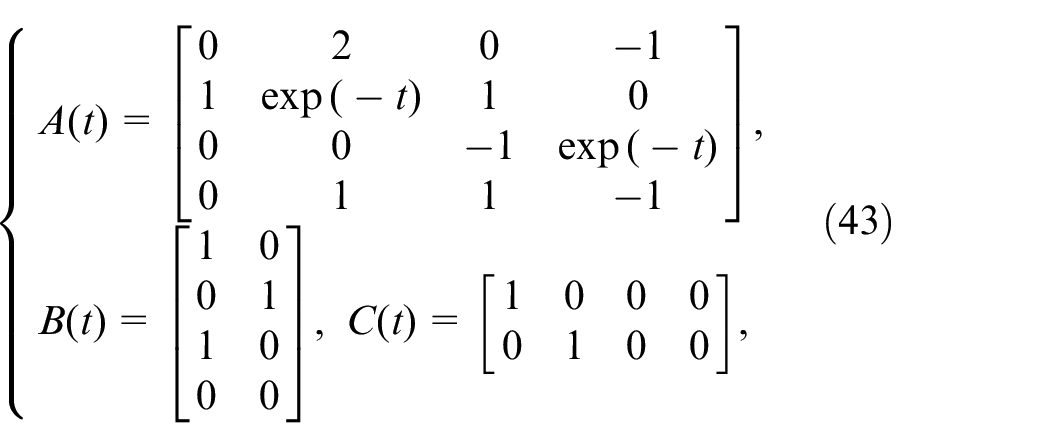
Consider the following 4th-order observable LTV system
and we will design the ROFO which can asymptotically tracks the functional signal (4) with
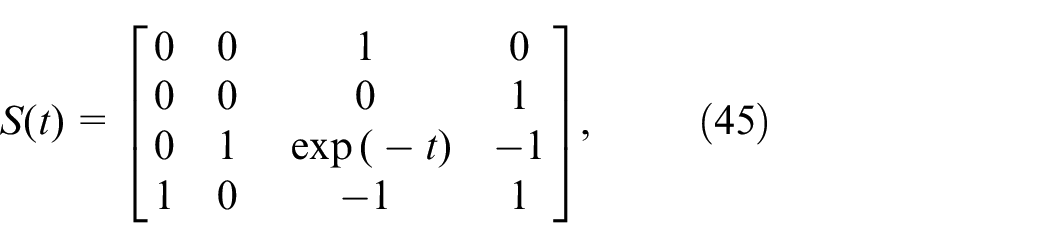
According to Lemma 2, the transformation matrix can be selected as
then we can obtain the block transformed system as
and also the functional
Further, matrices and satisfying (19) can be obtained as
Choose the Hurwitz matrix , denote and
Then, we have matrices , , and according to equations (32) and (33)
and
where
Further, the rank condition (34) should be satisfied, that is, the following equation holds
which indicates , .
Substituting the above formula into equation (31), yields the following parametric forms of the ROFO as
with
and
with parameter are selected arbitrarily.
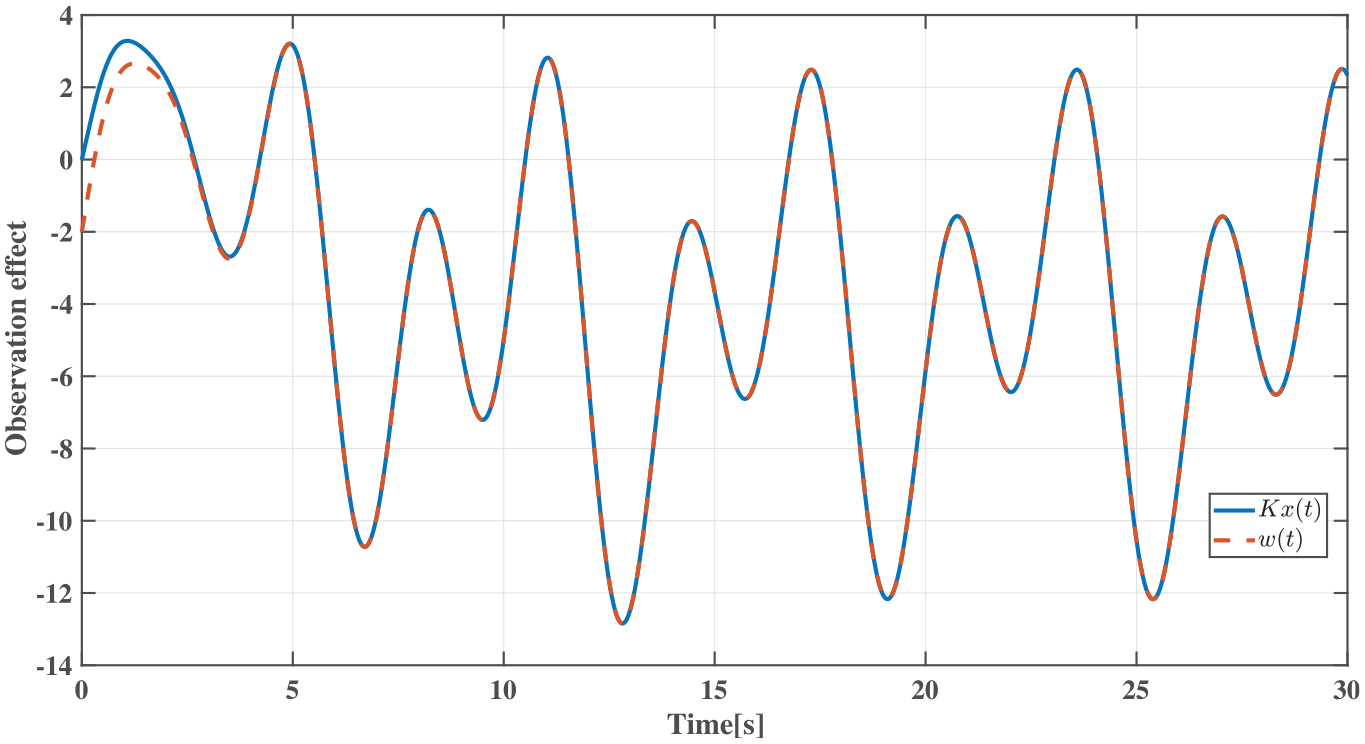
Consider the initial values as , , , and the control input as , , 0 ≤ t ≤ 30. Meanwhile, without loss of generality, choose to have the observer as shown below
and the simulation results are shown in Figures 1 and 2.
Observation effect of the designed observer.
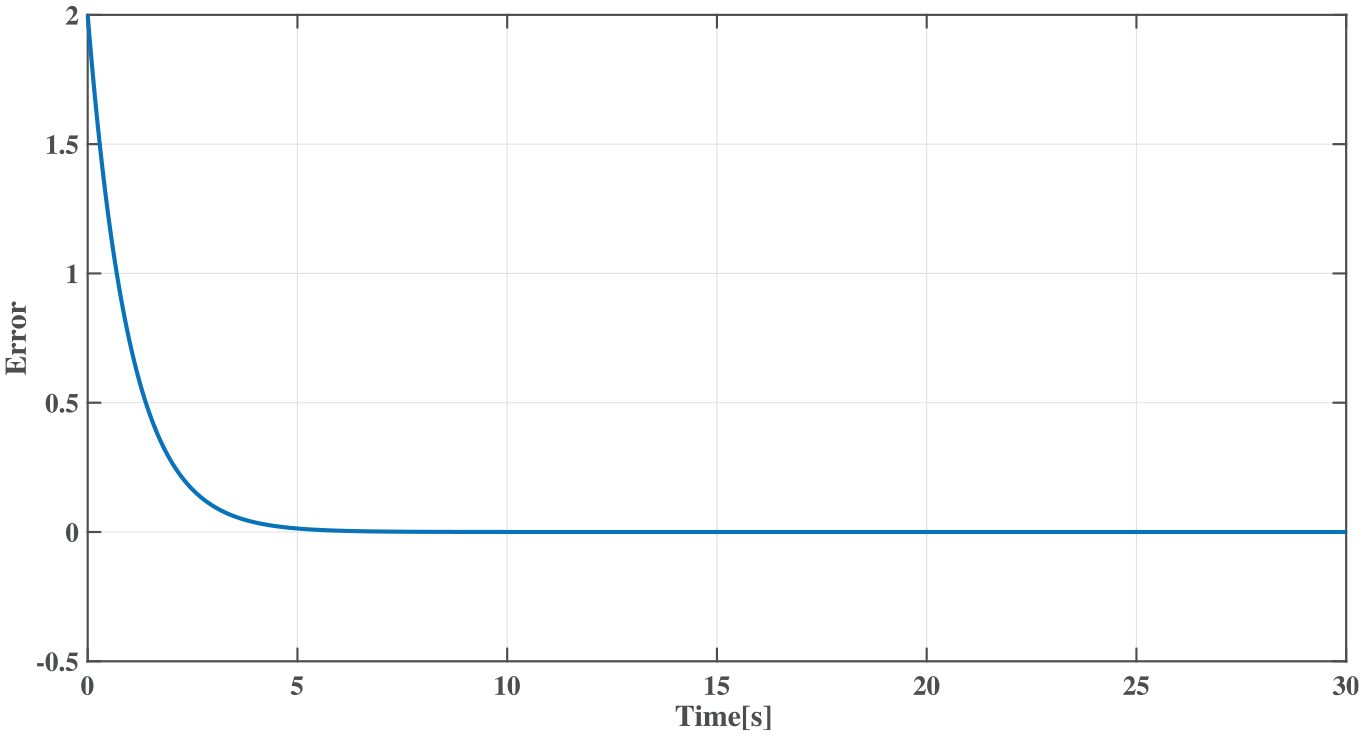
Estimated error.
Figure 1 shows the functional signal to be observed and the output of the designed observer, while Figure 2 shows the observed error defined as . From above figures, we can see that the designed observer achieves signal tracking in a short time, which verifies the effectiveness of the proposed method in this paper.
Comparative simulation
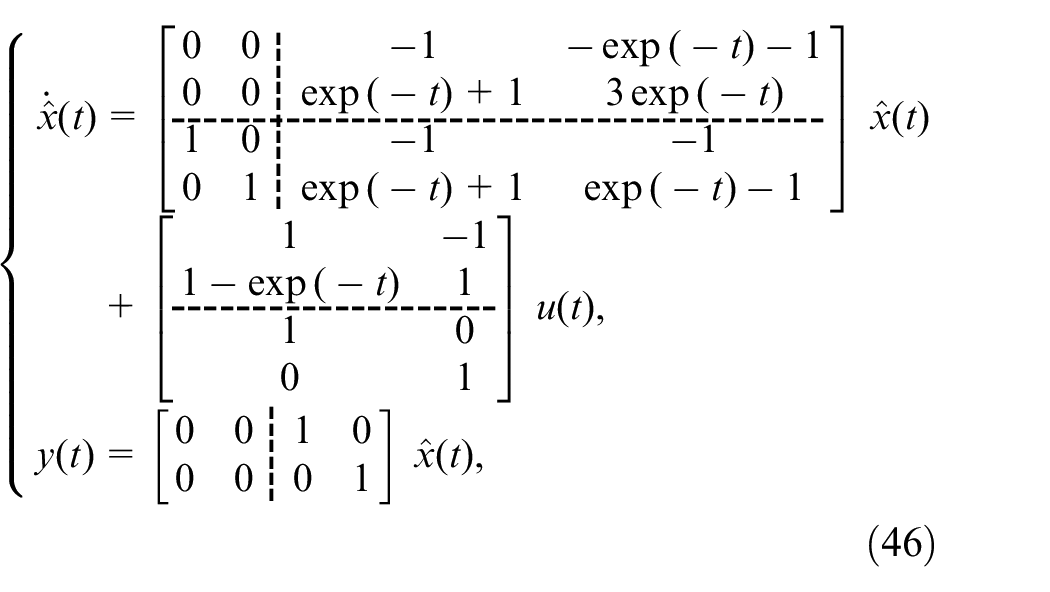
Let us consider the system described in Rotella and Zambettakis41 with
and the estimated vector (4) are defined by
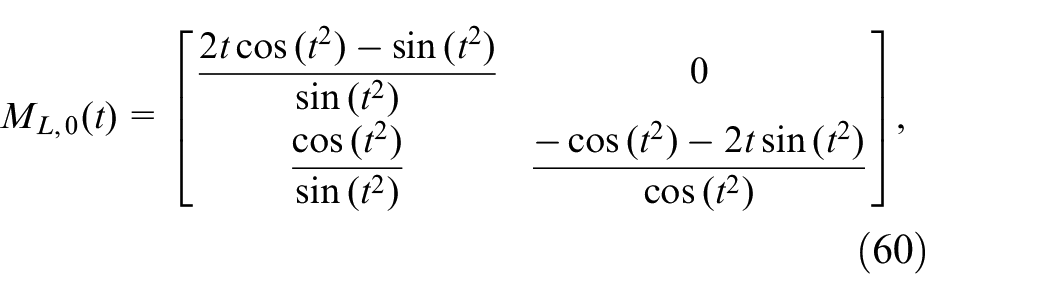
In particular, when and , using the method in Rotella and Zambettakis41 we have
it is easy to get that system is not satisfied with uniform asymptotic stability, which means that the method in Rotella and Zambettakis41 is invalid at this time, directly illustrates the effectiveness of this proposed method.
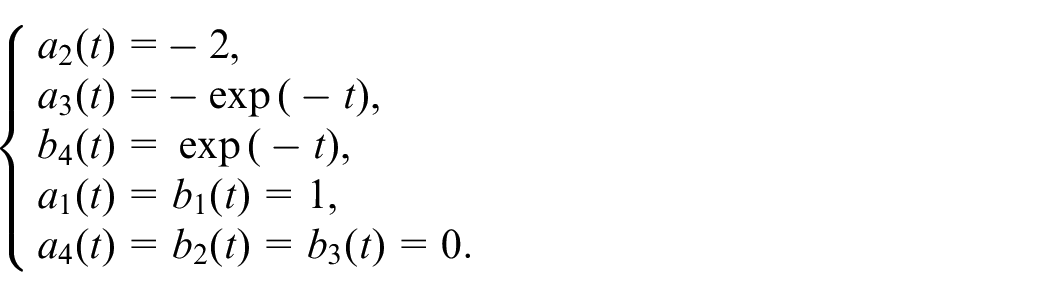
The coefficient matrix is drawn in the desired form, so the system does not need time-varying transformation. Further, select the system parameters as follows
Choose the Hurwitz matrix
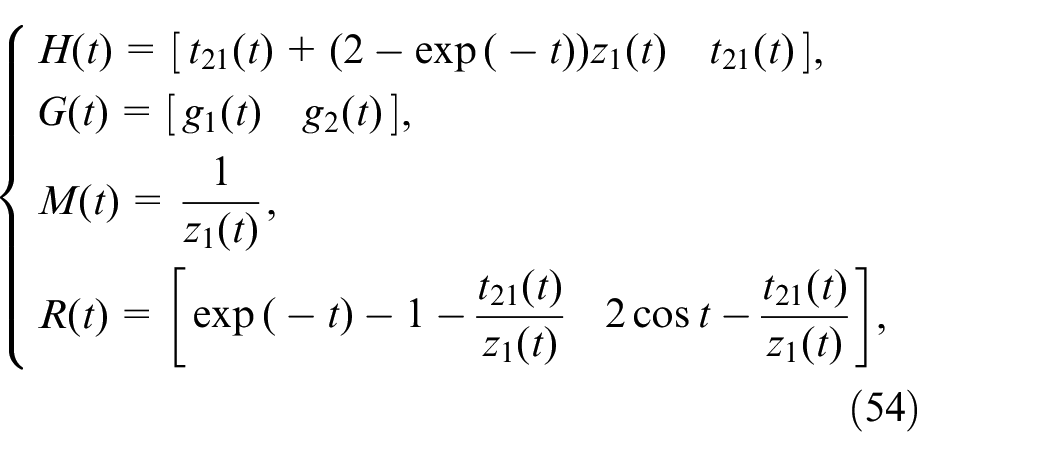
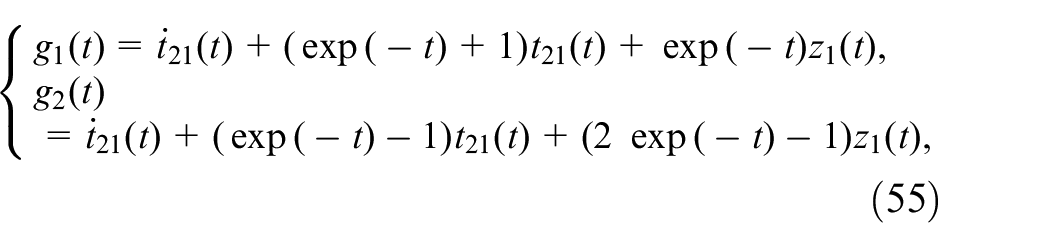
then according to Theorem 3, we obtain the following observer
with .
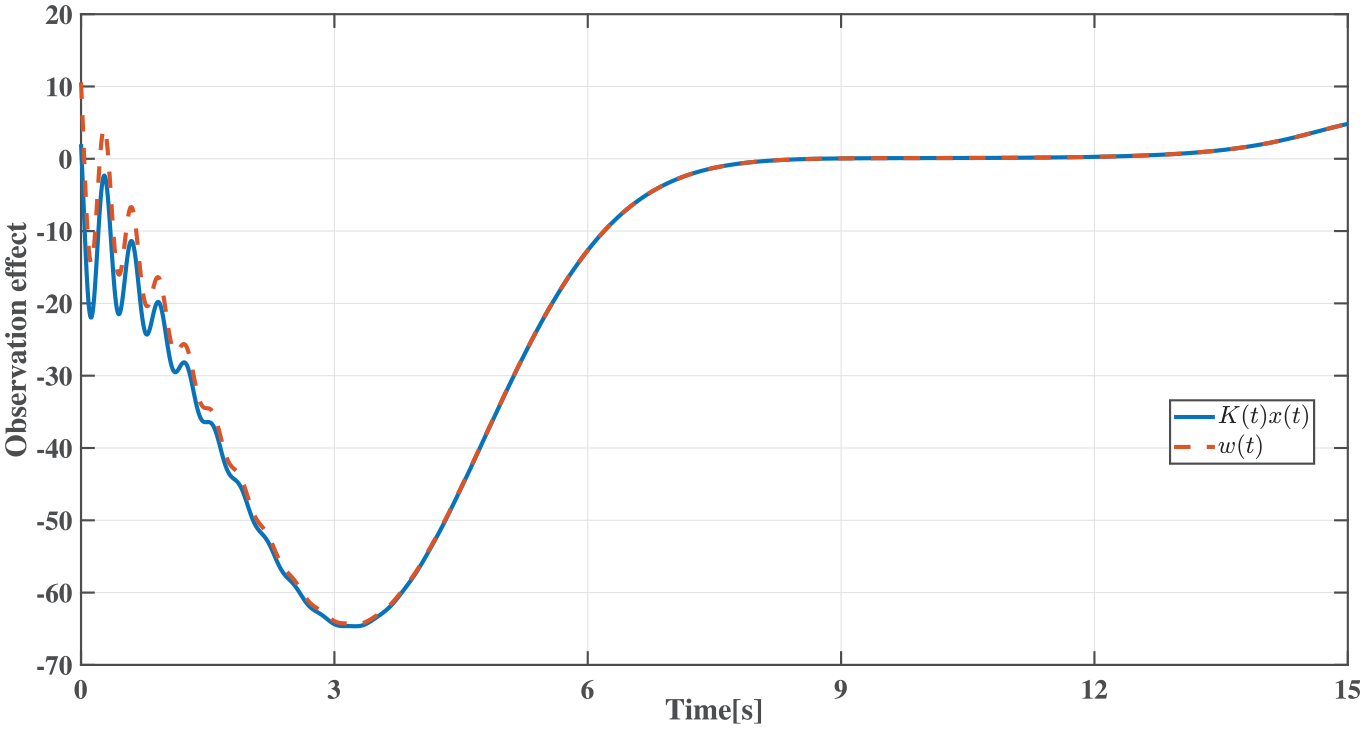
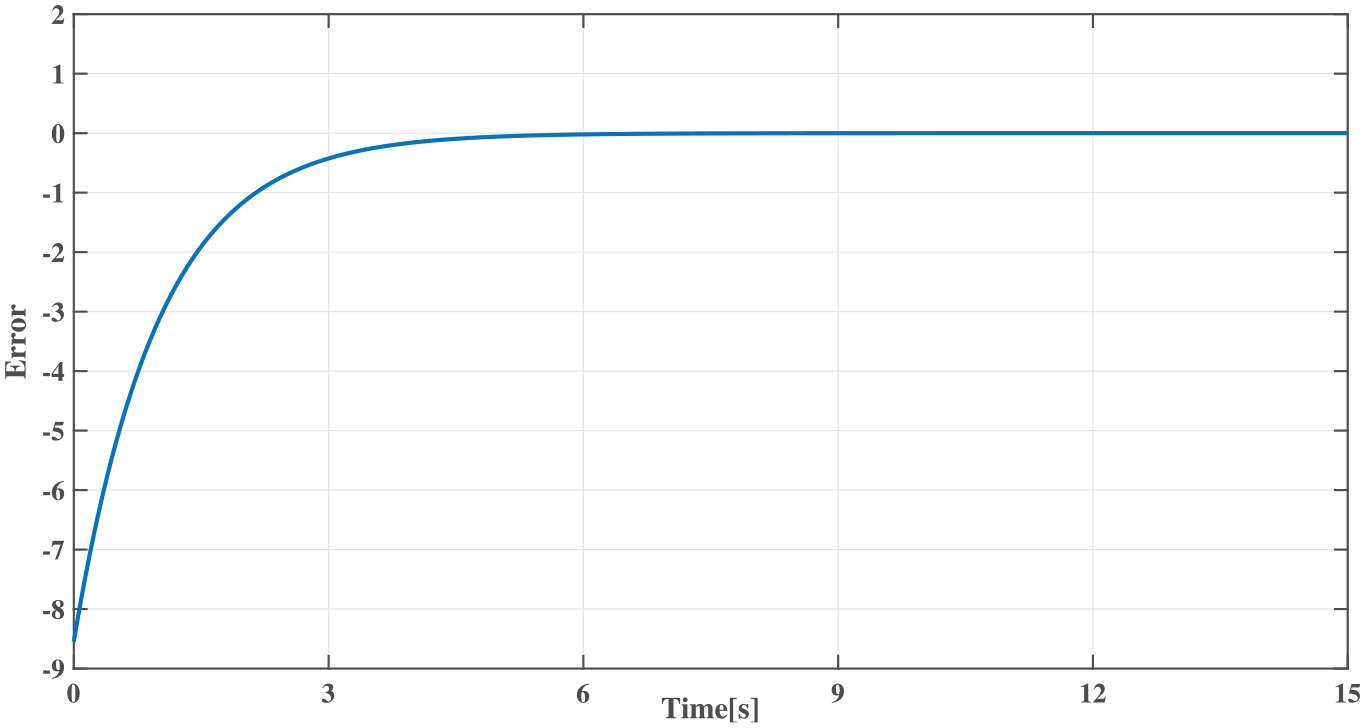
Consider the initial values as and , choose the control input as , 0 ≤ t ≤ 15. Then the simulation results are shown in Figures 3 to 5.
Observation effect of the designed observer.
Observation effect of the designed observer.
Estimated error.
Figures 3 to 5 respectively show the observation effect and observed error of the observer. It can be seen from these images that the designed observer can achieve signal tracking well. Compared with the method in Rotella and Zambettakis,41 this parametric design avoids the discussion of different cases and reduces the complexity of calculation. Meanwhile, because it does not involve the assumption about stability, the method has a wider applicability and can be applied to any situation.
Aircraft control system
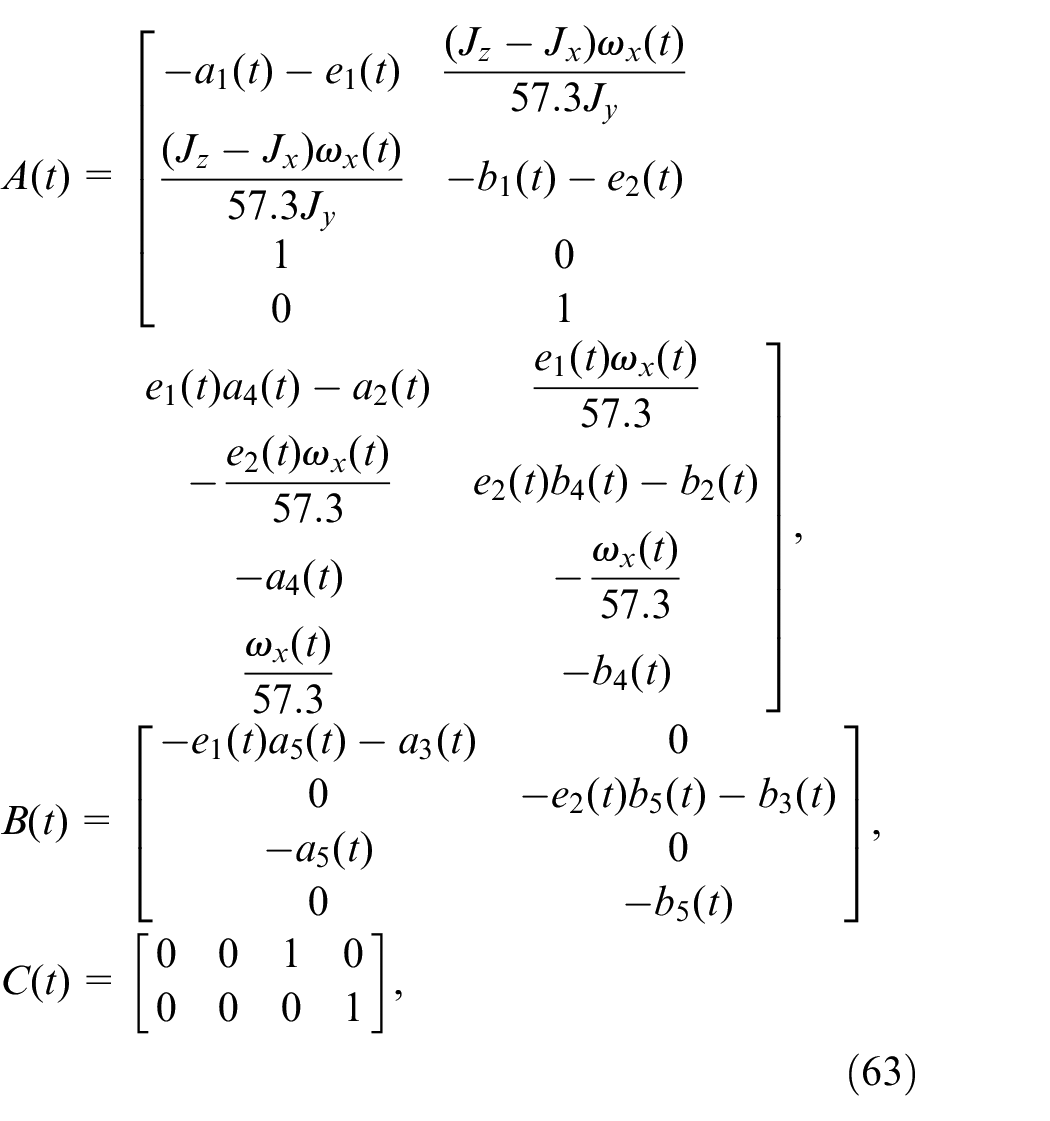
This section takes the ROFO design for BTT aircraft control system as an example to verify the proposed method. Tan et al.11 presented the mathematical model of BTT missile pitch/yaw channel autopilot as
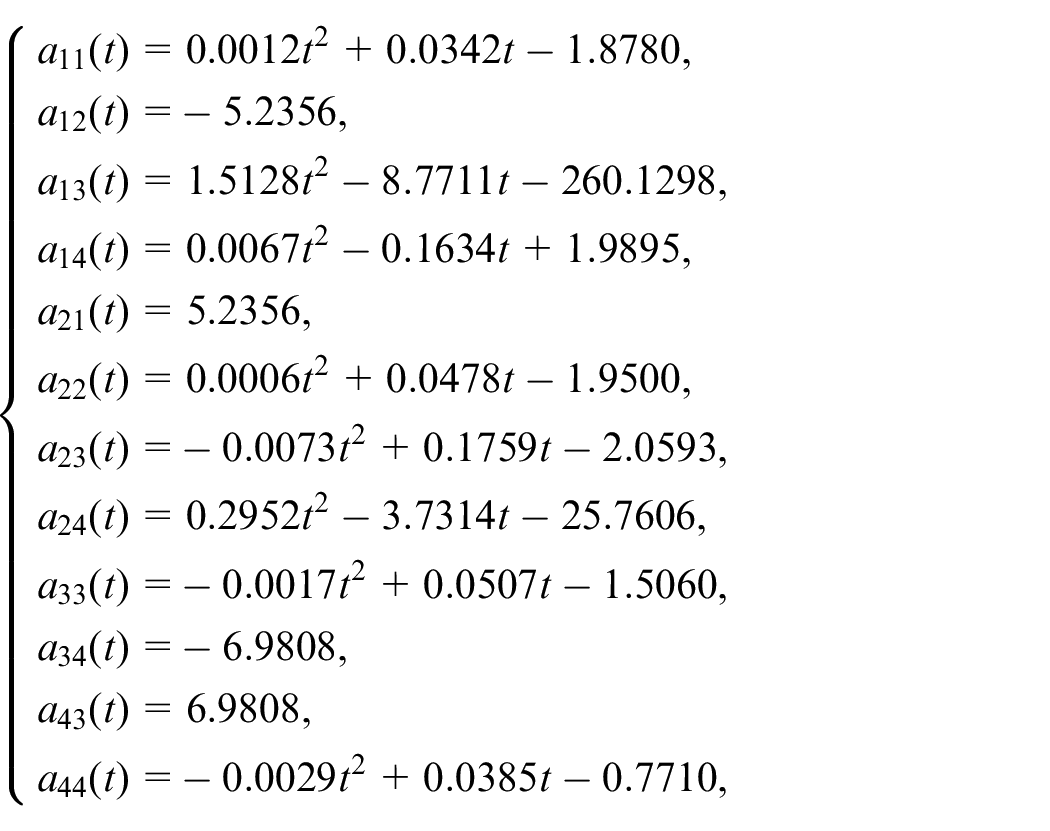
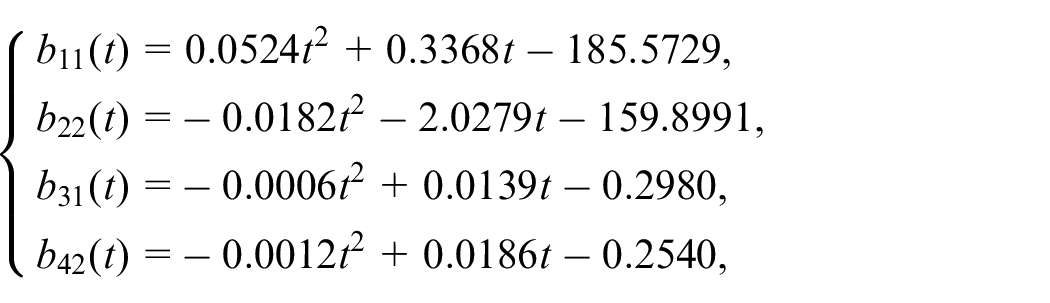
where state , input , and output . The parameters , , , which vary with altitude and speed of the missile. , , are the components of angular velocity on the three axes of the projectile coordinate system; , are the angle of attack and sideslip; , represent the yaw angle of the pitch rudder surface and the yaw rudder surface; , , are the moments of inertia of the missile relative to the three axes of projectile coordinate system. The data fitted to matrices and are given as follows
and
where and .
Let the functional
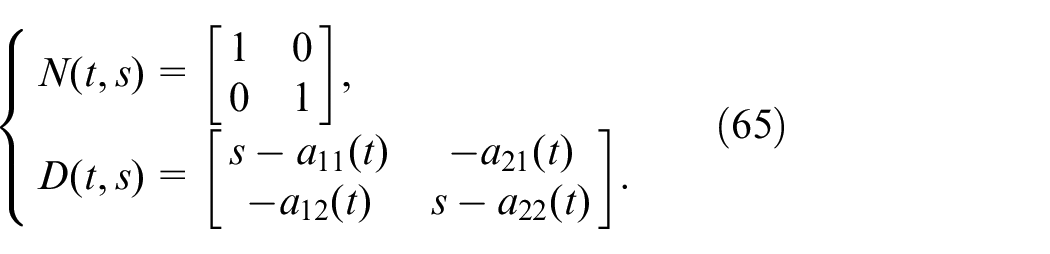
The coefficient matrix draws in the desired form, thus, the model of BTT aircraft control system is standard form (22) without time-varying transformation. Further, the matrices and satisfying RCF (19) can be obtained as
Choose the Hurwitz matrix , denote and
Then, we have the parametric forms of matrices , , and according to equations (32) and (33)
where
and
where
Further, the rank condition (34) should be satisfied, that is, the following equation holds
which indicates , .
Substituting the above formula into equation (31), yields the following parametric forms of the ROFO as
with
and
where is the parameter can be selected arbitrarily.
Consider the initial values as , , and , without loss of generality, choose the control input as , 0 ≤ t ≤ 15. Let , construct the following observer
with and the simulation results are plotted in Figures 6 and 7.
Observation effect of the designed observer.
Estimated error.
Figures 6 and 7 respectively show the observation effect and observed error of the ROFO. From these two images, we can see that the designed observer can quickly and accurately realize signal tracking, which verifies the effectiveness of this design method in BTT aircraft control system.
Conclusions
Aiming at the ROFO of LTV systems, this paper proposes the existing conditions of the observer and a parameterized design method. Since the gain matrices are given in the form of parameters, when the design requirements change, only the free parameters need to be modified, and other design requirements can be met by using the free parameters. In addition, the designed observer has a lower dimensionality, so it can save costs and is more suitable for engineering practice. Examples including a numerical one, a comparison one and an actual aircraft control one demonstrate the validity of this method.
The future work can be carried out in the following two aspects:
1. Optimize the performance of the observer to meet other control requirements. For example, according to the demand, establish an index
which is a scalar function with respect to the design parameters and , then form an optimization problem of the following form
Depending on the specific problem, there may be other constraints added to the above optimization.
2. Extend the results to systems with complex characteristics. For instance, time-delay systems, enriching the observer theory.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Major Program of National Natural Science Foundation of China [grant numbers 61690210, 61690212].
ORCID iD
Yin-Dong Liu
References
1.
LuenbergerDG. Observing the state of a linear system. IEEE Trans Mil Electron1964; 8(2): 74–80.
2.
DuXZhaoHChangX. Unknown input observer design for fuzzy systems with uncertainties. Appl Math Comput2015; 266: 108–118.
3.
HuongDCHuynhVTTrinhH. Interval functional observers for time-delay systems with additive disturbances. Int J Adapt Control2020; 34(9): 1281–1293.
4.
LiHGaoYShiP, et al. Observer-based fault detection for nonlinear systems with sensor fault and limited communication capacity. IEEE Trans Autom Control2016; 61(9): 2745–2751.
5.
YangYDingSXLiL. On observer-based fault detection for nonlinear systems. Syst Control Lett2015; 82: 18–25.
6.
LeeD. Nonlinear disturbance observer-based robust control for spacecraft formation flying. Aerosp Sci Technol2018; 76: 82–90.
7.
TanYXiongMDuD, et al. Observer-based robust control for fractional-order nonlinear uncertain systems with input saturation and measurement quantization. Nonlinear Anal Hybri2019; 34: 45–57.
8.
ZhaoXWangXMaL, et al. Fuzzy approximation based asymptotic tracking control for a class of uncertain switched nonlinear systems. IEEE T Fuzzy Syst2020; 28(4): 632–644.
9.
AbdelazizTH. Stabilization of linear time-varying systems using proportional-derivative state feedback. Trans Inst Meas Control2018; 40(7): 2100–2115.
10.
ZhouBDuanG. Periodic Lyapunov equation based approaches to the stabilization of continuous-time periodic linear systems. IEEE Trans Autom Control2012; 57(8): 2139–2146.
11.
TanFZhouBDuanG. Finite-time stabilization of linear time-varying systems by piecewise constant feedback. Automatica2016; 68: 277–285.
12.
ThabetREHRaïssiTCombastelC, et al. An effective method to interval observer design for time-varying systems. Automatica2014; 50(10): 2677–2684.
13.
ZhangJYinDZhangH. An improved adaptive observer design for a class of linear time-varying systems. In: 2011 Chinese control and decision conference (CCDC), Mianyang, China, 23–25 May 2011, paper pp.1395–1398. New York: IEEE.
14.
LiLDuanG. Observer design for a class of linear time-varying systems. In: 2017 36th Chinese control conference (CCC), Dalian, China, 26–28 July 2017, paper pp.116–121. New York: IEEE.
15.
TranningerMZhukSSteinbergerM, et al. Sliding mode tangent space observer for LTV systems with unknown inputs. In: 2018 IEEE conference on decision and control (CDC), Miami Beach, 11–13 December 2018, paper pp.6760–6765. New York: IEEE.
16.
XiongYSaifM. Unknown disturbance inputs estimation based on a state functional observer design. Automatica2003; 39(8): 1389–1398.
17.
BezzaouchaSVoosHDarouachM. A new polytopic approach for the unknown input functional observer design. Int J Control2018; 91(3): 658–677.
18.
SinghSJanardhananS. Functional observer design for linear discrete-time stochastic system. In: 2017 Australian and New Zealand Control Conference (ANZCC), Gold Coast, Australia, 17–20 December 2017, paper pp.175–178. New York: IEEE.
ThuanMVHuongDCSauNH, et al. Unknown input fractional-order functional observer design for one-side lipschitz time-delay fractional-order systems. Trans Inst Meas Control2019; 41(15): 4311–4321.
21.
YenDTHHuongDC. Functional interval observers for nonlinear fractional-order systems with time-varying delays and disturbances. Proc Inst Mech Eng I J Syst2021; 235(4): 550–562.
22.
HuongDCYenDTH. Functional interval observer design for singular fractional-order systems with disturbances. Trans Inst Meas Control2021; 43(3): 567–578.
23.
LunguMLunguR. Reduced order observer for linear time-invariant multivariable systems with unknown inputs. Circuits Syst Signal Process2013; 32(6): 2883–2898.
24.
RotellaFZambettakisI. A design procedure for a single time-varying functional observer. In: 52nd IEEE conference on decision and control, Firenze, Italy, 10–13 December 2013, paper pp.799–804. New York: IEEE.
25.
SundarapandianV. Reduced order observer design for nonlinear systems. Appl Math Lett2006; 19(9): 936–941.
26.
LiuYTongSWangD, et al. Adaptive neural output feedback controller design with reduced-order observer for a class of uncertain nonlinear SISO systems. IEEE T Neural Networ2011; 22(8): 1328–1334.
27.
WangCJiaoX. Observer-based adaptive arbitrary switching fuzzy tracking control for a class of switched nonlinear systems. Int J Control Autom Syst2015; 13: 823–830.
28.
LiBWangFZhaoK. Large time dynamics of 2D semi-dissipative Boussinesq equations. Nonlinearity2020; 33(5): 2481–2501.
29.
ZhangZLiuZDengY, et al. A trilinear estimate with application to the perturbed nonlinear Schrödinger equations with the Kerr law nonlinearity. J Evol Equ2020: 1–18.
30.
HuHYiTZouX. On spatial-temporal dynamics of a Fisher-KPP equation with a shifting environment. Proc Am Math Soc2020; 148: 213–221.
31.
ManickamIRamachandranRRajchakitG, et al. Novel Lagrange sense exponential stability criteria for time-delayed stochastic Cohen–Grossberg neural networks with Markovian jump parameters: a graph-theoretic approach. Nonlinear Anal Model2020; 25(5): 726–744.
32.
ZhouBDuanG. A new solution to the generalized Sylvester matrix equation . Syst Control Lett2006; 55: 193–198.
GuDZhangD. Parametric control to second-order linear time-varying systems based on dynamic compensator and multi-objective optimization. Appl Math Comput2020; 365: 124681.
35.
GuDZhangD. Parametric control to a type of descriptor quasi-linear high-order systems via output feedback. Eur J Control2021; 58: 223–231.
36.
GuDLiuLDuanG. A parametric method of linear functional observers for linear time-varying systems. Int J Control Autom2019; 17(3): 647–656.
37.
GuDLiuQYangG. Linear function observers for linear time-varying systems with time-delay: a parametric approach. IEEE Access2020; 8: 19398–19405.
38.
D’AngeloH. Linear time-varying systems: analysis and synthesis. Boston: Allyn and Bacon, 1970.
39.
ShiehLSGanesanSNavarroJM. Transformations of a class of time-varying multivariable control systems to block companion forms. Comput Math Appl1987; 14(6):471–477.
40.
TrumpfJ. Observers for linear time-varying systems. Linear Algebra Appl2007; 425(2): 303–312.
41.
RotellaFZambettakisI. On functional observers for linear time-varying systems. IEEE Trans Autom Control2013; 58(5): 1354–1360.
42.
LuenbergerDG. An introduction to observers. IEEE Trans Autom Control1971; 16(6): 596–602.