
Abstract
For the linear multivariable systems, by combining both merits of orthogonal-function approach and evolutionary optimization, in this paper, a new method is presented for designing a Luenberger reduced-order observer to solve the low-sensitivity design issue for physical system parameter deviation and simultaneously to minimize a measurement of the quadratic performance for reducing state transient estimation error. Two given examples illustrate the effectiveness of the presented new low-sensitivity design approach on state estimation performance. From the given examples, it shows that the estimated state errors are not sensitive to system parameter deviation and have the asymptotical convergence property. Besides, the performances are apparently superior to those without considering low-sensitivity design means.
Keywords
Introduction
State feedback control system is based on the available state variables. For dynamic control systems in which state variables cannot be obtained by direct measurement, the system states must be estimated. Therefore, designing state observers is one of the most important problems for state-feedback control systems. Many researchers have dedicated to the problem for designing state observer.1–17 In practice, some states are known. Estimating available states is meaningless. In this case, a reduced-order observer can be used to estimate the unknown states. The large transient estimator error (at the beginning, the estimated trajectory deviates from the desired one) leads to a peaking phenomenon which may be impractical or unsafe to use. 10 Under the best knowledge of the author, for linear multivariable control systems, the performance improvement problem for transient estimation of Luenberger “reduced-order observer” was studied only by a small number of researchers.1,3,4,14 That is, the original research works, which are about the performance improvement problem for transient estimation of Luenberger reduced-order observer are presented by Kung and Yeh, 1 Horng and Chou,3,4 as well as Chou and Cheng. 14 But, the approaches of Kung and Yeh 1 as well as Horng and Chou3,4 cannot be applied to designing the optimal Luenberger reduced-order observer when the number of unmeasured states is smaller than the number of outputs. The optimal design means proposed by Chou and Cheng 14 can not only exhibit better estimation accuracy than the methods of Kung and Yeh as well as Horng and Chou, but also can overcome the shortcoming of the means presented by Kung and Yeh 1 as well as Horng and Chou.3,4 The method of Chou and Cheng 14 is used to design a Luenberger reduced-order observer such that (i) the measurement of quadratic performance for state estimation error is minimized to suppressing the error of transient estimation, and (ii) the eigenvalues of the reduced-order observer have the asymptotical convergence property.
The parameters of control system are subject to variations due to several factors. 18 To accomplish successful system study, it is essential to consider the deviation of a system from its nominal behavior caused by the deviation of its parameters from their normal performance characteristics. In practice, the observer is designed to have optimal estimation for one set of system parameter values, but the designed observer no longer remains having optimal estimation for a different of values when the system parameters may deviate from their nominal values. Hence it is necessary to consider low sensitivity issue for designing the observer. The approach of Chou and Cheng 14 can be used to design a Luenberger reduced-order observer such to have asymptotical convergence property and effectively suppress the transient estimation error. But, Chou and Cheng 14 do not consider the low-sensitivity issue in designing the reduced-order observer. In addition, under the best of knowledge of the author, there is no existing literature to study the problem of designing reduced-order observers simultaneously considering both transient estimation performance improvements and low sensitivity. So, in this paper, the purpose is to investigate the design problem for Luenberger reduced-order observer with considering three design issues simultaneously as following: (i) guaranteeing eigenvalues to have asymptotically convergent performance, (ii) reducing the sensitivity of state estimation error trajectories to system parameter changes, and (ii) minimizing the quadratic performance measure for reducing transient estimation error.
This paper is organized as follows. The problem statement is described in Section 2. Section 3 proposes the design approach of optimal linear Luenberger reduced-order observer. Two demonstrative examples are presented in Section 4. The final section, Section 5, presents the conclusions.
Problem statement
A linear time-invariant system is considered as:


in which the system


where

in which

Therefore, in order to estimate


in which



where L denotes the
The estimated error vector is given to be

Thus, it is obtained that14,20

By setting
Taking the partial derivative equation (12) with respect to the parameter

where

in which
Therefore, by augmenting the original estimated error system equation (12) with its sensitivity model (14), the overall dynamic equation of the estimated error system considering sensitivity can be obtained as follows:
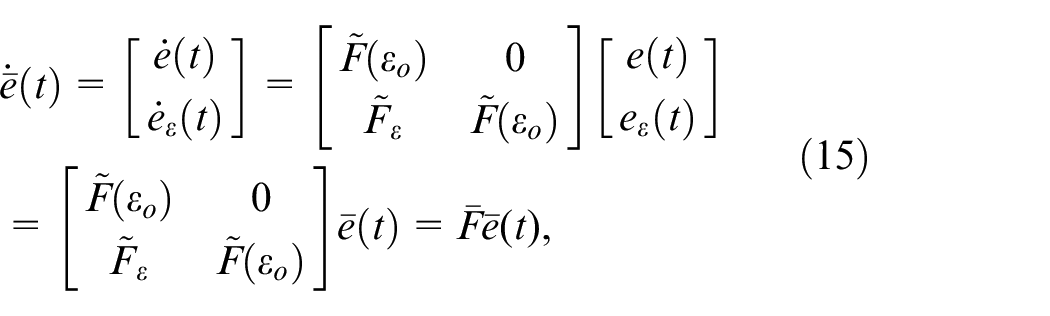
where
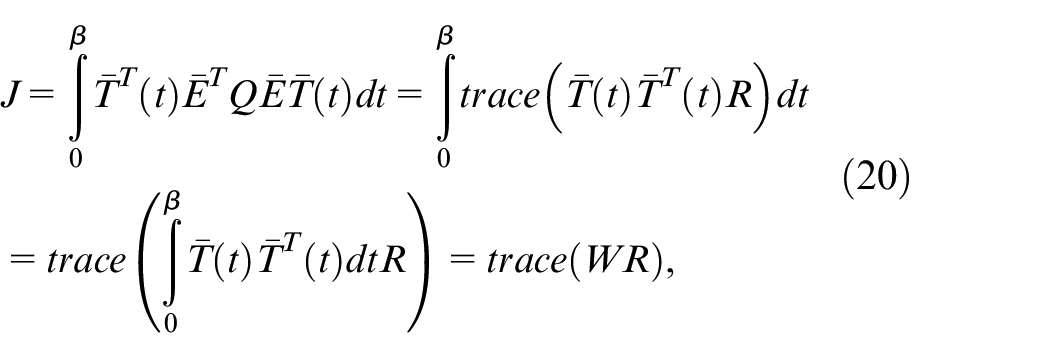
A measurement of quadratic performance for estimation error of equation (15) is given as:

where
The design problem for a low-sensitivity linear Luenberger reduced-order observer in this paper is to direct finding the matrix L of observer gain so that the eigenvalues for the matrix
Optimal design of low-sensitivity Luenberger reduced-order observer
The orthogonal-function method (OFM) has been favorably used to investigate various systems and control problems.14,21–23 The main feature of OFM is the conversion of integral and differential equations to algebraic equations. Thus, OFM has become very computationally prevalent because the dynamical system equations can be changed into a set of algebraic equations, which facilitates to solve the original system and control problem.14,21–23 Therefore, the OFM is applied in this paper. All elements of

in which
In equation (17), any orthogonal set of functions may be used. Only a truncation is considered in equation (17) by using q term number to approximate the error vector
Adopting the orthogonal-function expression for

and applying the Kronecker product, the

where
Replacing the truncated orthogonal-function expression for the
in which
In order to guarantee the eigenvalues of the matrix

where
Optimal design procedures of low-sensitivity Luenberger reduced-order Observer
Demonstrative examples
In this section, two example are presented to demonstrate the efficiency of the proposed optimization method for the design problem of Luenberger reduced-order observer with considering three design issues simultaneously as following: (i) guaranteeing eigenvalues to have the performance of asymptotical convergence, (ii) reducing the sensitivity of state estimation error trajectories to system parameter changes, and (ii) minimizing the quadratic performance measure for reducing transient estimation error. The used evolutionary environments of HTGA are as following: the maximum generation is 50, the size of population is 50, the rate of crossover is 0.75, and the rate of mutation is 0.02. The shifted Chebyshev series23,25 is the class of orthogonal function used in this section.
A double-inverted system of sixth-order with four outputs is considered here and described as following 32 :
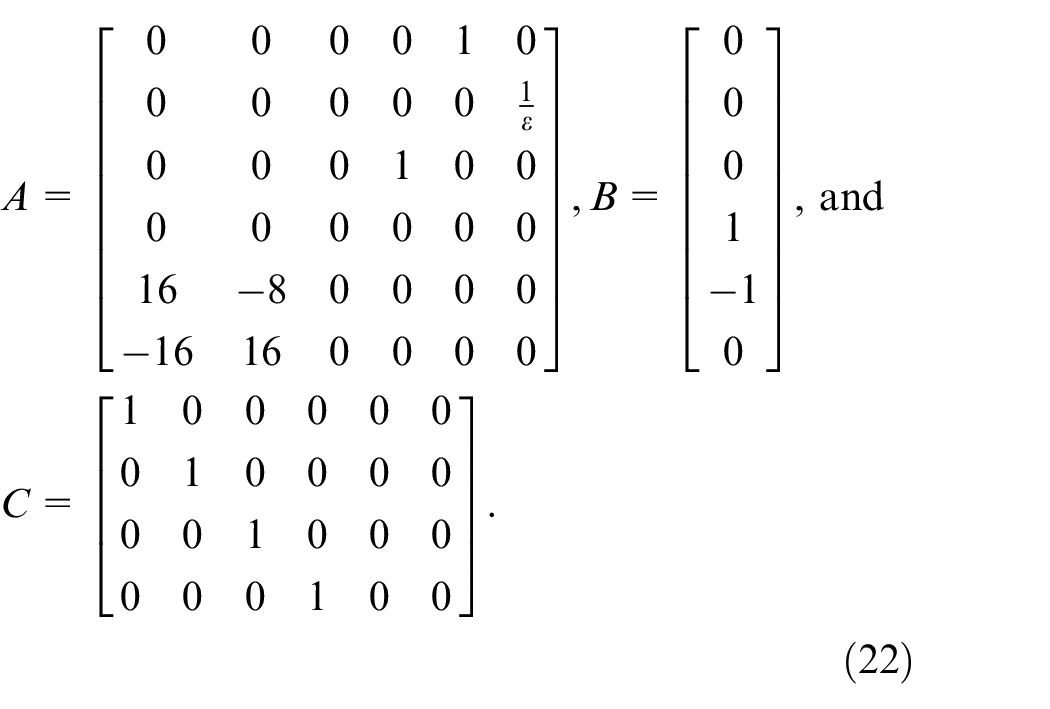
In this example, the output number is four. The nominal parameter value of
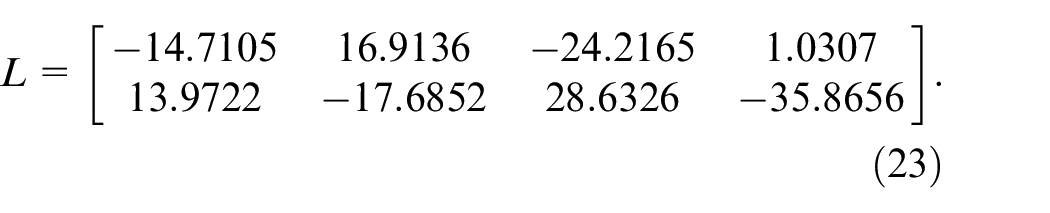
Here, for comparison, an optimal reduced-order observer under non-considering the design condition of low-sensitivity to parameter change is designed. The optimal matrix L of non-low-sensitivity reduced-order observer gain can be acquired as
The comparisons of state estimation errors for the to-be-estimated states

A comparison of state estimation errors for the state ) and optimal non-low-sensitivity estimation ( ), respectively.
), respectively.
A comparison of state estimation errors for the state ) and optimal non-low-sensitivity estimation (), respectively.
Consider a DC motor which converts an electrical input voltage signal into an output torque here and described as following 33 :

In this example, the nominal parameter value of
A comparison of state estimation errors for the state ) and optimal non-low-sensitivity estimation (), respectively.
Conclusions
By using both orthogonal function method and evolutionary optimization, in this paper, a new method has been presented for designing the low-sensitivity Luenberger reduced-order observer to implement three design requirements: guaranteeing the estimation errors to have asymptotically convergent performance, suppressing the estimation error of transient response, and reducing the sensitivity of state estimation error trajectories to system parameter changes. The results of two demonstrative examples show that the proposed new approach indeed facilitates to achieve the mentioned-above three design requirements. The constraint of the matrix-measure-based condition in equation (21) makes the error vector of state estimation asymptotically converging to zero with reducing the steady-state errors. In addition, the presented design method of observer with the measurement for quadratic performance of equation (16) supplies a penalty for both transient error and sensitivity to system parameter changes. This paper has shown that the existence of a physically achievable, optimally designed matrix L of observer gain can improve the transient error performance without being sensitive to change in system parameters. That is, this paper presents a pioneering work in handling the issue of designing reduced-order observer under considering both low-sensitivity to system parameter changes and transient estimation performance improvement. The future research direction is to combine the proposed low-sensitivity reduced-order observer design method with the Takagi-Sugeno fuzzy modeling approach for designing the low-sensitivity reduced-order observer of nonlinear systems.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Science and Technology Council, Taiwan, under Grant Number 109-2222-E-992-003-MY2.