This paper investigates the design of reduced-order functional observer for linear time-invariant systems (LTI) with time-varying delay. Firstly, the sufficient condition for the existence of reduced-order delay-free functional observers is obtained. Secondly, by solving generalized Sylvester matrix equations (GSEs), completely parameterized formulas of the coefficient matrices of reduced-order function observer are established. The free parameter matrices in the formulas provide the design degrees of the freedom and improve the convergence rate of the error system. Finally, two numerical and a practical examples are provided to illustrate the effectiveness of the proposed approach.
For a dynamical system, the estimation of the state is essential in many fields, either to construct a control law or to monitor the system’s real-time operating status. Luenberger made a remarkable contribution to the observer,1,2 and has been attracted the attention of many researchers, such as fault detection,3 permanent magnet synchronous motor servo systems,4 DC motors,5 ball and beam systems,6 and complex dynamical networks,7 etc.
The functional observer greatly decreases the order and complexity of the observer. Therefore, it has attracted a large number of scholars to carry out related research. For LTI systems, functional observers and existence conditions were presented.8 The concept of functional observability/detectability and a minimum-order function observer were introduced.9 For linear time-varying (LTV) systems, Gu et al.10 investigated functional observers without transforming the systems into a particular form. By the efficient matrix factorization, the constructive procedures of the functional observers for the LTV system were provided.11 Further, Gu et al.12 constructed a functional observer for second-order linear time-varying systems under the framework of second-order systems. More related research can be found in the literature.13–19
Time-delay phenomena are frequently encountered in many practical systems. It has a significant effect on system performance and may cause instability, oscillation, and so on. Therefore, time-delay systems are also widely concerned, recent results can be found in the literature,20–27 and reference therein. According to the spectral decomposition techniques, Bhat and Koivo28 presented the theory of Luenberger observer for time-delay systems. Zheng et al.29 solved the design of the unknown input Luenberger observer for the linear time-delay systems. Moreover, observer design problem of descriptor time-delay systems was investigated and the existence condition of the observer was also given by Zheng and Bejarano30 Based on the matrix equation method, Wang et al.31 addressed the observer design problem for neutral delay systems. In the case when the state is not available, for the design problem of functional observers, some interesting results also have been obtained. The linear functional state observer was introduced for time-delay (TD) systems.32 Further, Trinh et al.33 designed the reduced-order functional observers for positive TD systems. Yuan et al.34 proposed a class of observer via virtue of the adaptive law. Based on a generalized coordinate change, the design problem of observers was extended to LTI systems with TD.35 Darouach presented the conditions for the existence of the th-order observers for systems with delays in state variables,36 then researched the discrete-time systems.37 However, the approaches mentioned above still yield a delay term in the observer. Delay-free state observers of linear systems with a constant TD have been considered.38,39 To the authors’ knowledge, only Trinh et al.40 provided the reduced-order delay-free observer with TD.
Different from existing methods, through the simple transformation, the design of the parameters of the delay-free observers for LTI systems with time-varying delay is converted into the solution of GSEs in the literature.41,42 The proposed method has many advantages. For example, the delay of the system is time-varying and there are no restrictions. Besides, the considered observer is reduced-order and delay-free, which can reduce the order of the observer and the complexity of implementation. Moreover, due to the existence of arbitrary parameters, it provides the degrees of freedom to optimize the performance of the observer. For the design of observers, we proposed both necessary and sufficient conditions. Then, we researched the order of delay-free observers and proposed the conditions for the existence of reduced-order function observers. With parametric methods, we can effectively solve the corresponding constraints.
The rest of this paper is arranged as follows. In Section 2, the problem statement is presented, and some notations and assumptions are provided. Section 3 introduces some preliminary results. Section 4 provides the generally parametric delay-free reduced-order observer. Section 5 provides two numerical and one practical examples are introduced to verify the proposed approach. Finally, Section 6 concludes this paper.
Problem statement
Consider the linear time-invariant (LTI) system with time-varying delay as follows
where is the state vector, is the measured output vector and is the control vector, , , and are known coefficient matrices, is a continuous initial function. The delay is time-varying in the time interval , .
The main purpose of this paper is to investigate the normal function observer. Then, we concentrate on the delay-free Luenberger-type functional observer as follows
where is the observer state vector, is the observer output vector. Finding the matrix parameters , , , , and is the design purpose such that
hold for the given matrix , initial values , , and control input .
This paper proposes the conditions for the existence of delay-free Luenberger-type functional observers for system (1), then presents a parametric design method to the observers under the following assumptions.
Assumption 1.
The observability index of the system (1) is defined as the least positive integer such that equation (4) holds.
Assumption 2., .
Preliminaries
Let , and define
The following theorem is given by the above discussion.
Theorem 1.Assume that the systems (1) and (2) are observable. Then, system (2) is a delay-free Luenberger-type functional observer for system (1) if and only if the matrixis Hurwitz, and there exists a matrixsatisfying
and
Proof. (Sufficiency): Combining equations (5), (1), and (2), then
If is Hurwitz, and equations (6)–(9) are satisfied, system (10) becomes
This implies that for arbitrarily , , and control input there holds
(Necessity): If is not Hurwitz, then there exists an initial function such that , , which makes as . If equation (7) is not satisfied, we can find a such that and also as . If any of the equations (6), (8), and (9) is not hold, we can find a to generate a to make as . The proof is completed.
Assume that , then there exists a rank decomposition of the form , where and are two full rank constant matrices. Substituting the rank decomposition into (6) yields
Due to is an invertible matrix, if and only if
We introduce some results of the solution to the following GSE
where , , , and are the coefficient matrices, and the matrix may not be prescribed, where and are the undetermined matrices.
When the rank condition is met, there exists right coprime factorization (RCF) as follows
Denote and
then
Based on above the discussion, we obtain the lemma as follows.
Lemma 1.41Let, , , , and rank conditions in Definition 1 hold. Moreover, andsatisfy (16). Then all the solutionsandto theequation (13)are given by
where is an arbitrary parameter matrix.
Main results
Now introduce the change of variable
where
and is any matrix such that the matrix is full rank. By the equation (19), the system can be inverted the following partitioned form
where
where , , , , , , , , , , , and are the related constant matrices, respectively.
It is obvious that and are completely observable. We obtain the lemma as follows through the transformed system (20).
Lemma 2.For the system (20), the observability index of the system (1) can be equivalent to
Proof. It can be easily proved directly by applying the definition of complete observability.
Based on Theorem 1, the existence conditions of delay-free Luenberger-type functional observers for the transformed system (20) can be deduced in the partitioned form.
Theorem 2.Assume that the systems (1) and (2) are observable. Then (2) is a delay-free Luenberger-type functional observer for the transformed system (20) if and only if the matrixis Hurwitz, and there exists a matrix, , satisfying
and
where , , .
Proof. Due to all results may be simply demonstrated by replacement, omit the proof of this theorem.
Then, the delay-free Luenberger-type functional observer (2) can be simplified as
Remark 1.From the transformation (19), the full state of the original system can be obtained from theoutput together with thestate variables of the observer. When, the function. This means that it is not necessary to establish the observer (29), we can obtain the functionby linear combination of output. The following assumption is made without losing generality.
Assumption 3. , .
In the following subsections, we propose the observer design method.
Parametric approach of -th order delay-free observer
The following Theorem is given to describe the parametric forms of the delay-free Luenberger-type function observer.
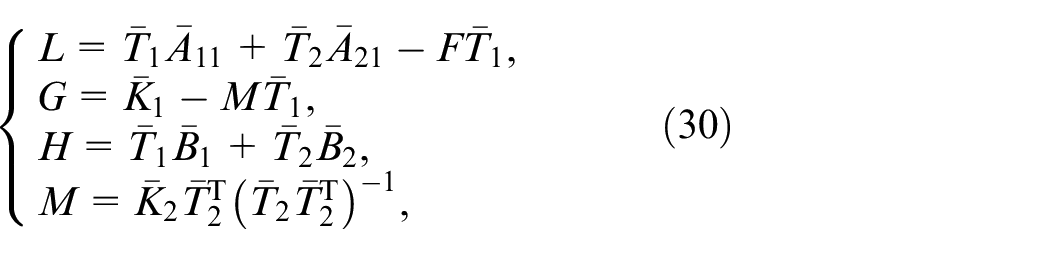
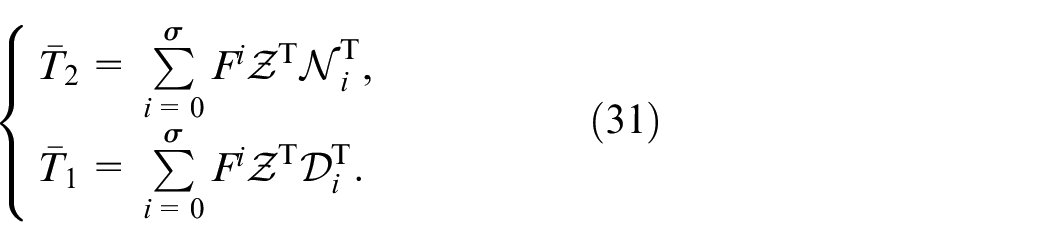
Theorem 3.Given the system (1) and the delay-free Luenberger-type functional observer (2) meeting Assumption 1-2, and an arbitrary Hurwitz matrix . Let matrix and satisfyequation (16), the following parametric coefficient matrices of -th order delay-free observer are proposed
where
and
satisfying the following constraints
Constraint 1.
and
Constraint 2.
withis an arbitrary parameter matrix.
Proof. The proof includes two steps.
Step 1. Parametric Expression for the Matrix.
According to equation (27), first-order homogeneous GSE is given as
Then the polynomial matrices of the above GSE are
Assume that the rank condition (15) is satisfied, there exist. Therefore, according to equation (18), the parametric solutions are presented in equations (31) and (32).
Step 2. Parametric Expressions for the Matrices, , , and.
The matrices and are obtained through equations (26) and (28) from Theorem 2. As a consequence, matrices and meet equations (26) and (28) if and only if Constraints 1 and 2 are satisfied, respectively.
We obtain the parametric gain matrices , , , and as (30). The proof is finished.
Remark 2.A major result was firstly presented by D. G. Luenberger2since for any completely observable systemand for most systems is much less than , observing a scalar linear functional of the state may be far simpler than the entire state vector, that is, the upper bound for the order of a scalar linear functional observer is. When there is-dimensional linear function to be estimated, the order of multi-functional observer is, whereis the order of the-th scalar functional observer. Based on the above discussion, a reduced-order observer of order less thancan be found, hence the whole order will be less than. Note that, otherwise, is the well-known minimum-order state observer. We expect the order of the designed delay-free observer to be less than the upper bound.
Remark 3.The parameter matrixprovides the degrees of freedom. Use the degrees of freedom to meet Constraints 1 and 2. The matrixcan provide the feasibility and convenience to design the reduced-order delay-free Luenberger-type functional observer.
Design algorithm
We proposed the following algorithm to find the -th order delay-free observer for the system (1)
Step 1.Choose a non-singular matrix.
Choose an adjustable matrixto ensure matrixbe invertible.
Step 2.Calculate the matricesand.
We obtain the following particular solutions through equation (16)
Step 3.Design the structure of matrix.
Denote a Hurwitz matrix, to make the error system stable, the eigenvalues of the matrix are required to be on the left half-plane, that is,
One first begins with the case =1.
Step 4.Calculate parameter matricesand.
Obtain the matricesandfromequation (31), check Constrains 1 and 2 of Theorem 3. If there exits a parameter matrix satisfying Constrains 1 and 2, go toStep 5. If there exits a parameter matrixnot satisfying Constrains 1 and 2, go back toStep 3, one proceeds to the case.
Step 5.Compute the coefficient matrices of observer.
Matrices, , , andcan be obtained through the formulas (30).
Example
Based on three examples verify the proposed approach.
Example 1
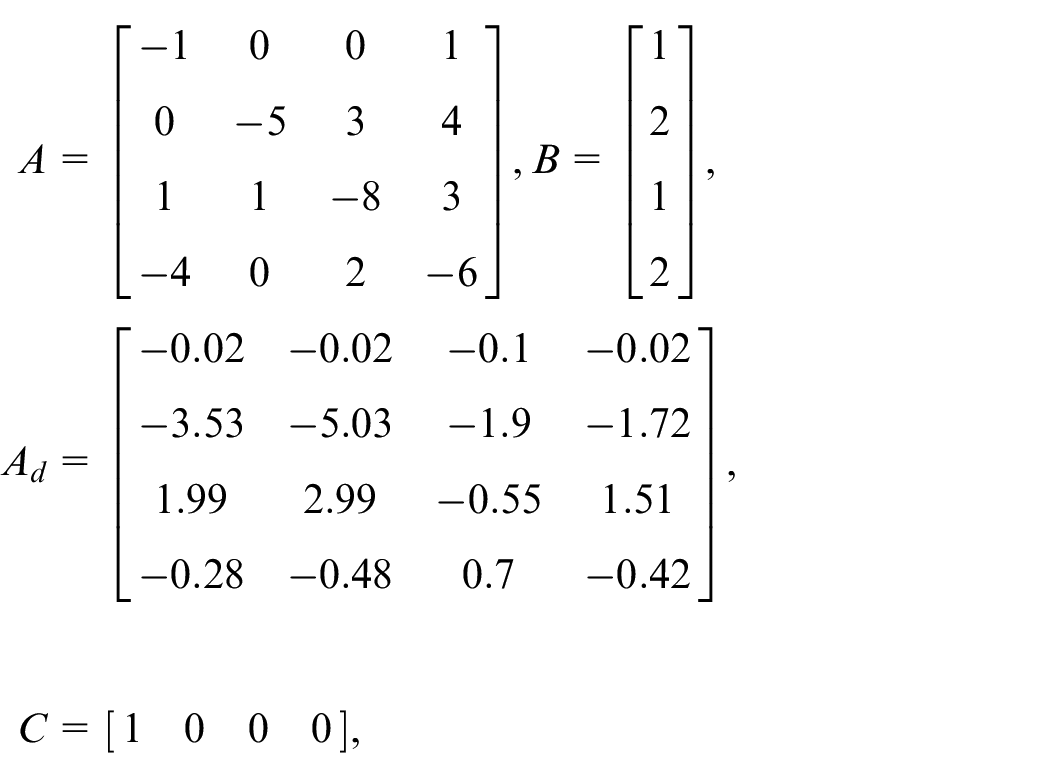
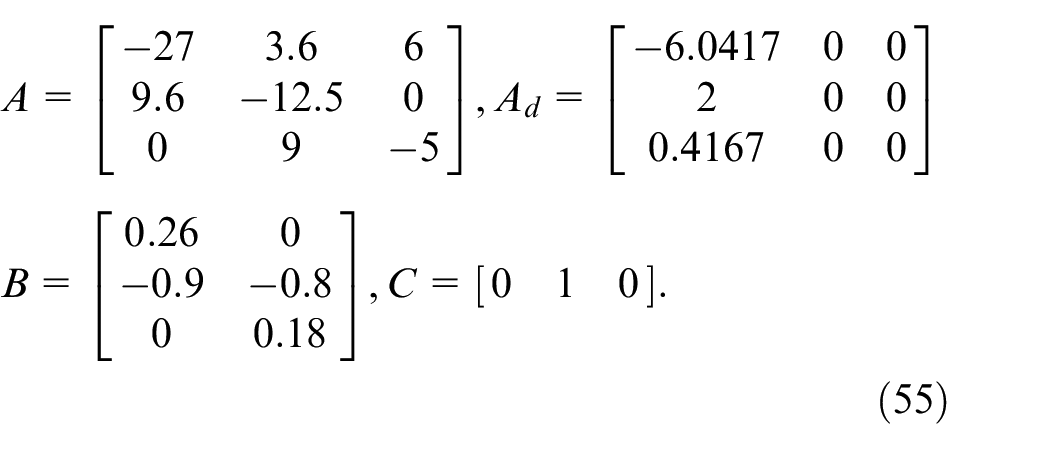
Consider system (1) with the coefficient matrices as follows.
We design a reduced-order delay-free Luenberger-type observer and the scalar function is given by
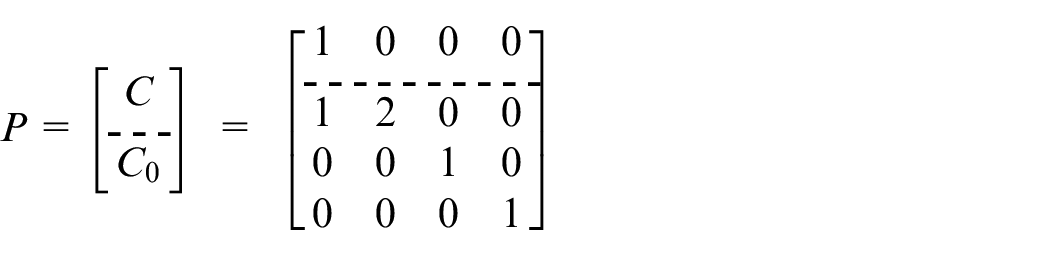
In the following, the observer gain matrices can be calculated. Choose the non-singular matrix as
and we can get the transformed system as follows
where
and the linear functional is given by
Then, we can infer that RCF (16) holds, and
Next step, we determine . First, let , and the parameter matrix be
Further, the second-order delay-free Luenberger-type observer can be obtained by Theorem 2
Due to the upper bound is , however, there exists a second-order delay-free Luenberger-type observer.
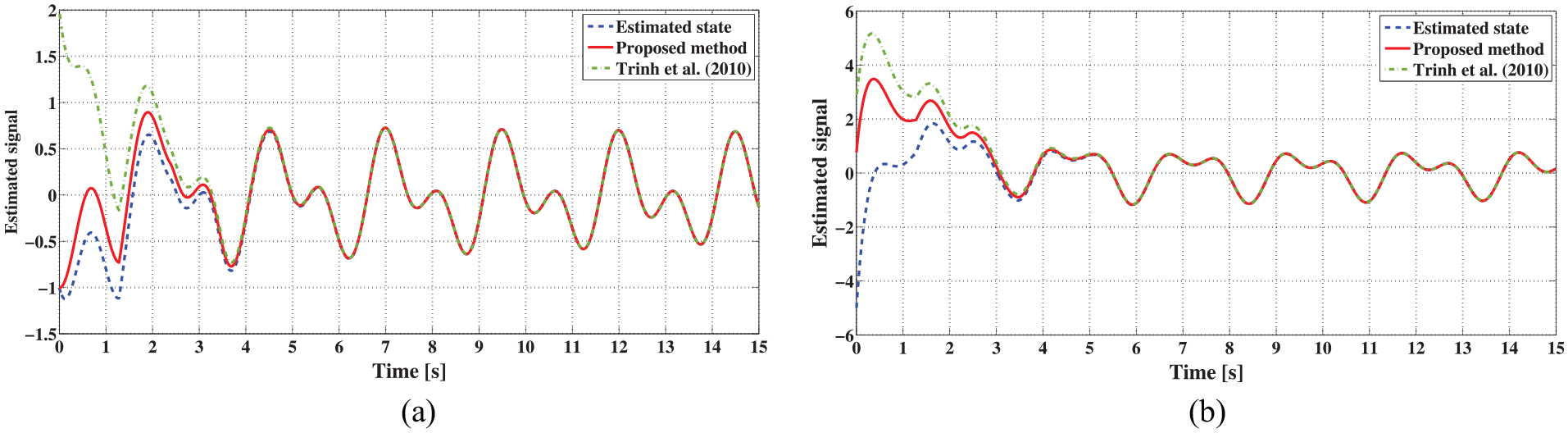
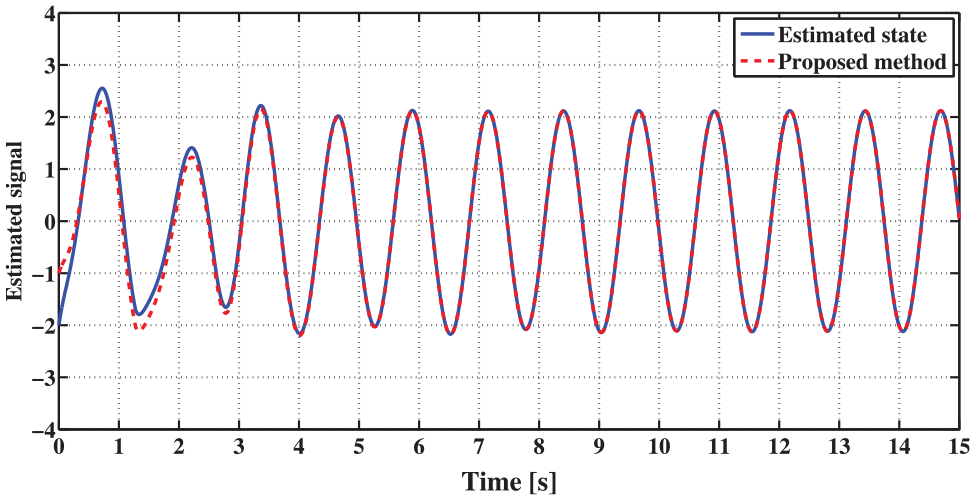
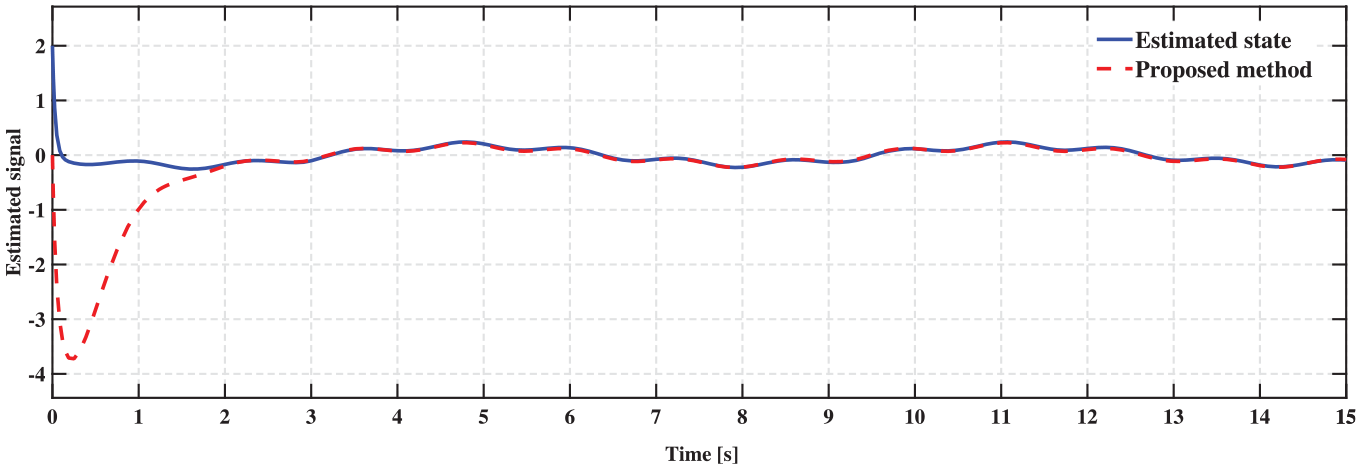
In order to compare with the method in Trinh et al.,40 we give the following initial conditions
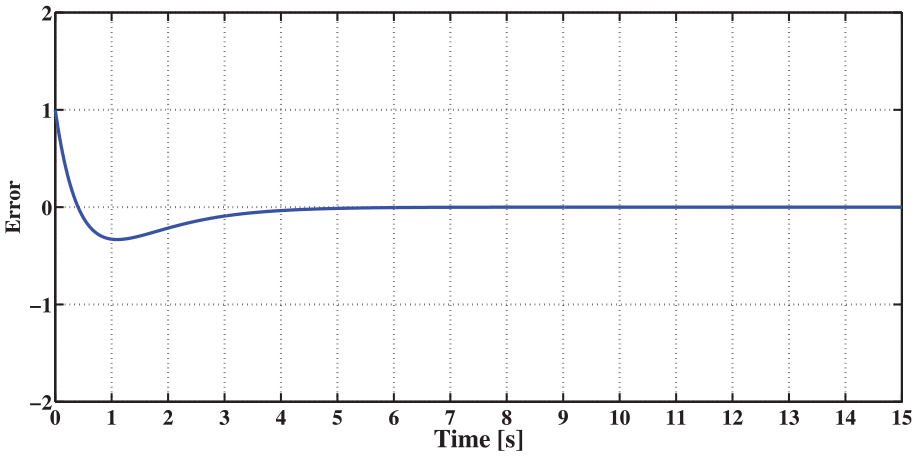
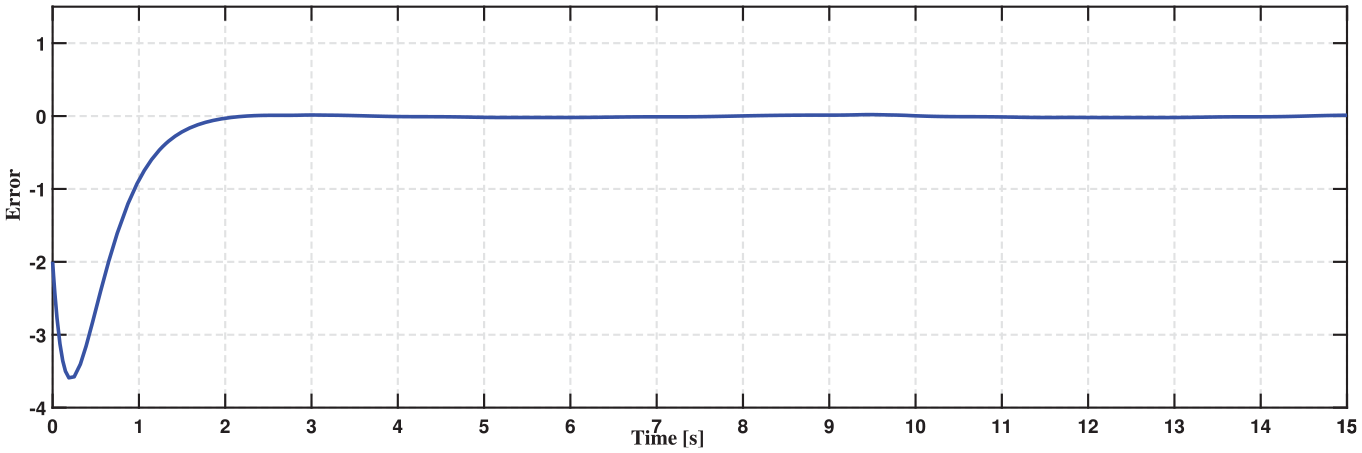
, and , meanwhile, Figures 1 and 2 represent the simulation results.
(a) and (b) show the comparison of the output among the estimated state, respectively, and .
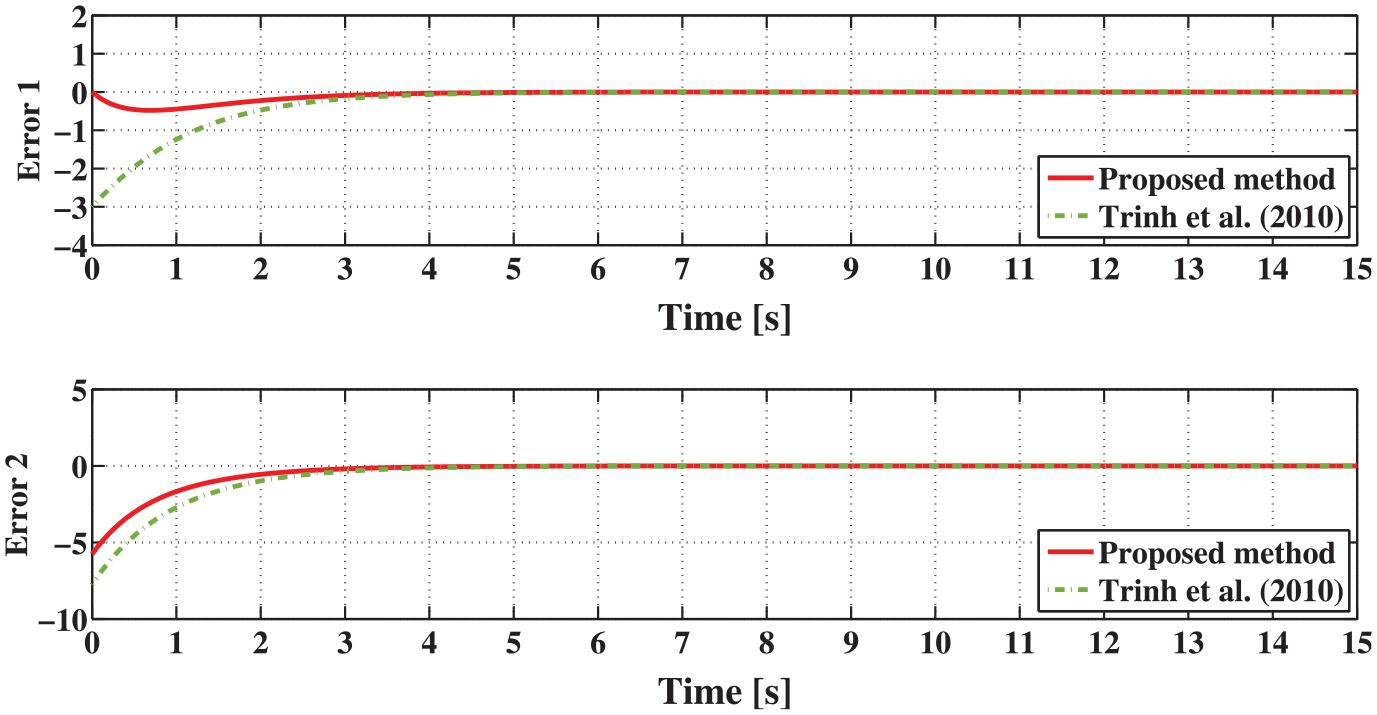
Estimation errors.
Figure 1 shows the comparison of the output among the estimated state, Trinh et al.,40 and the proposed method. The estimation errors are plotted in Figure 2. Under the same initial condition, comparison of Trinh et al.,40 and the proposed method, the proposed observer has better performance.
Example 2
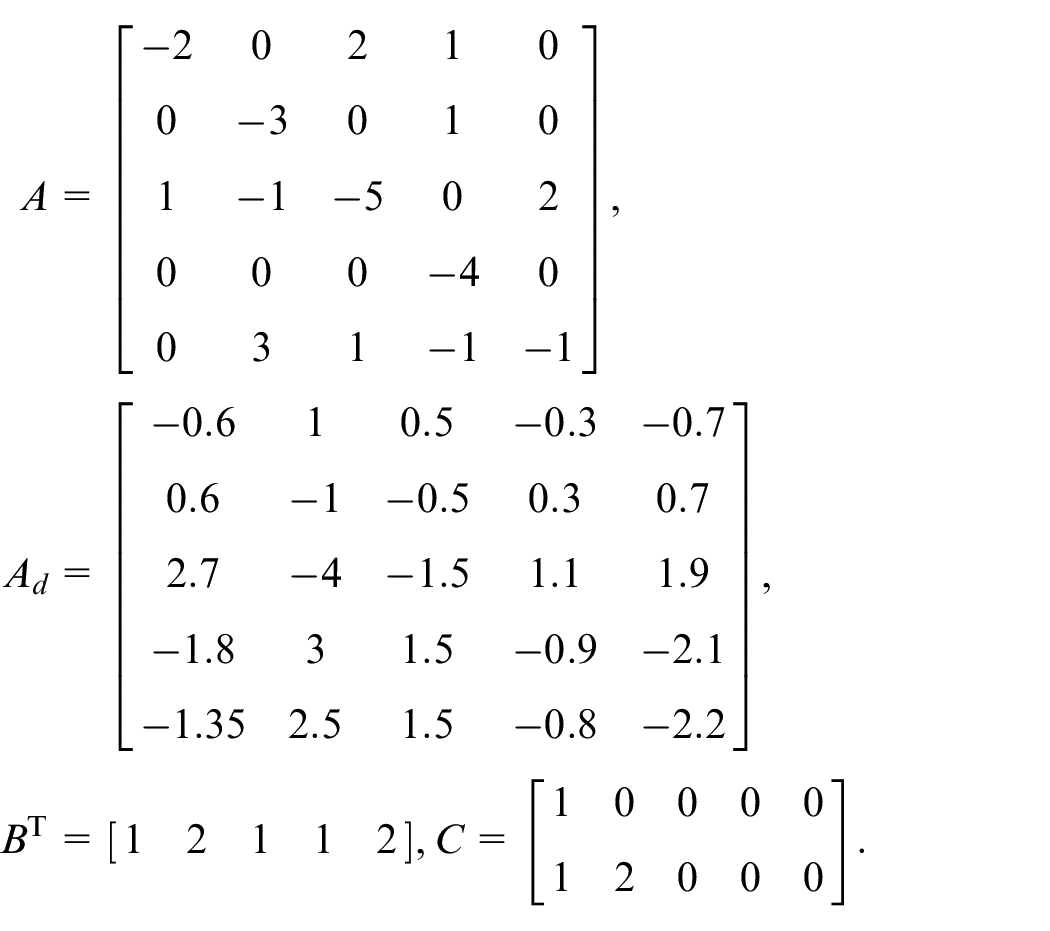
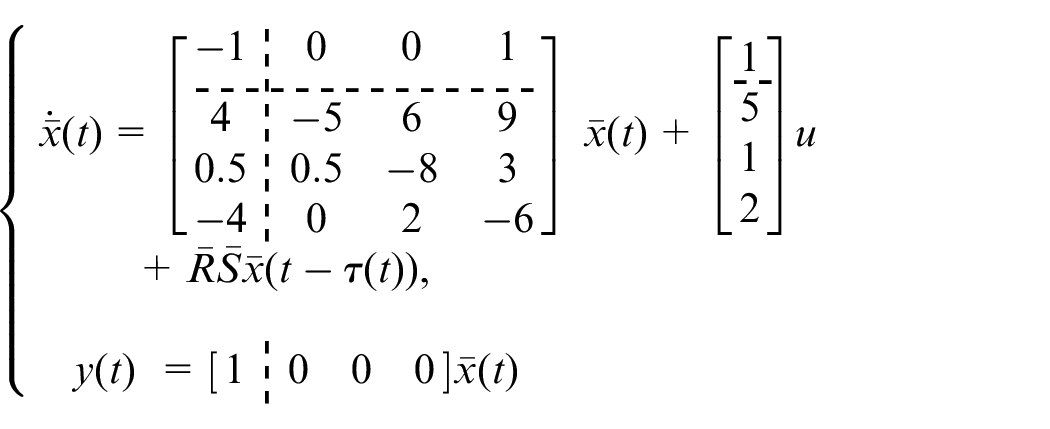
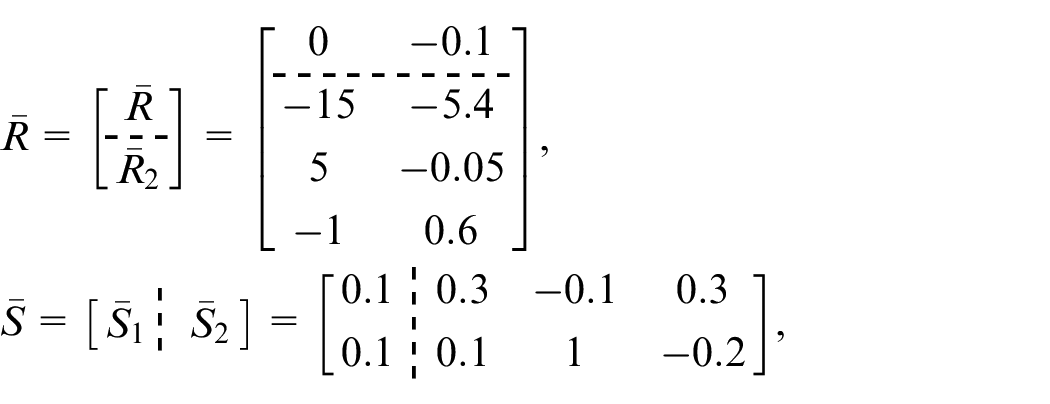
Consider the system with the following coefficient matrices
and the scalar function is given by
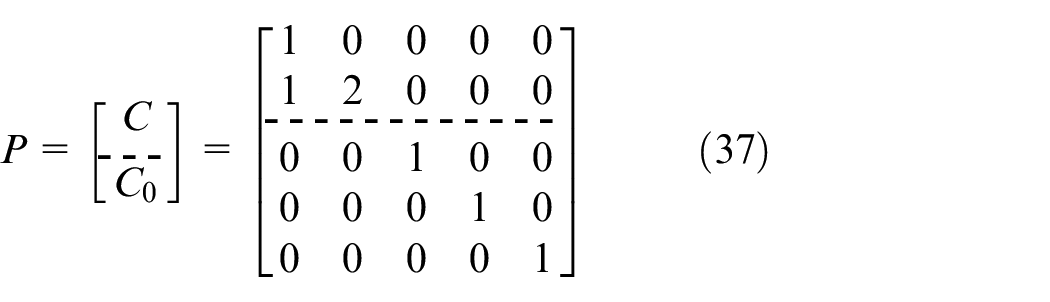
We choose the non-singular matrix as
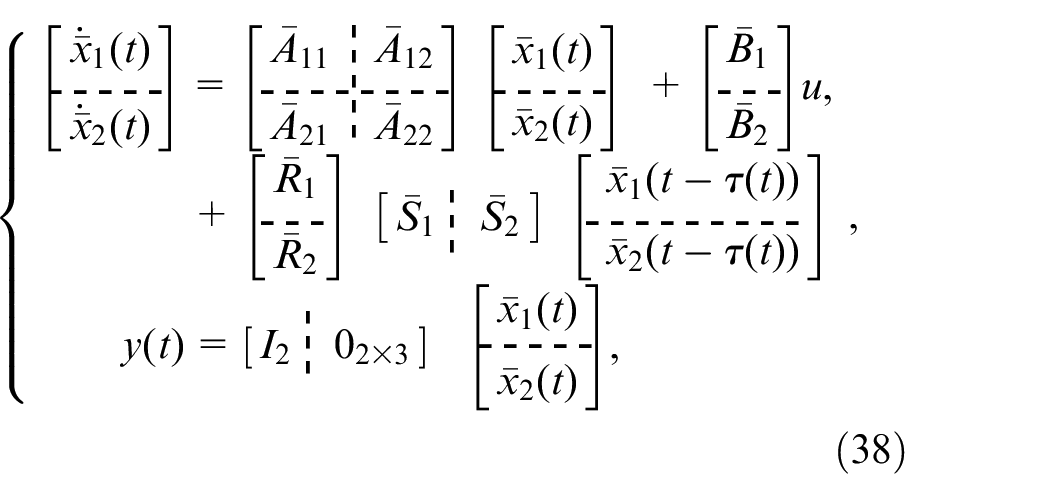
and the transformed system can be obtained as
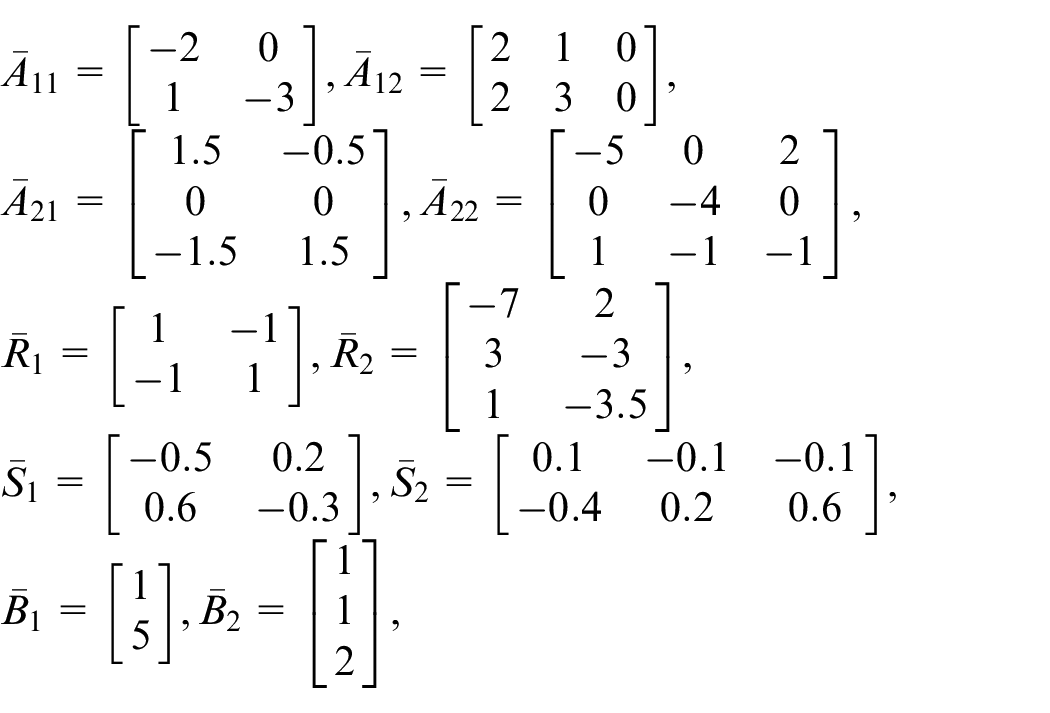
where
and the linear functional is given as
Then, we can infer that the RCF (16) is correct, and
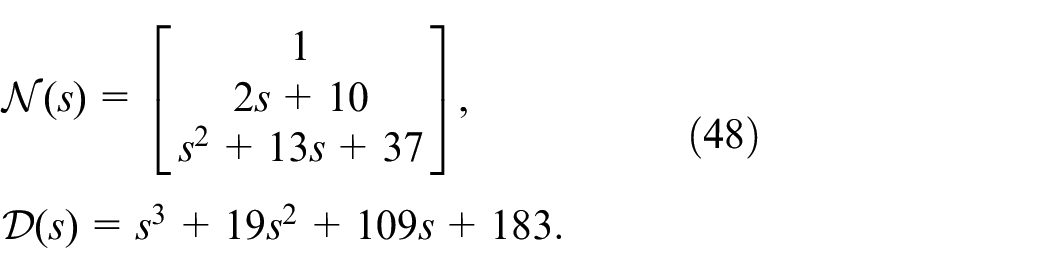
Next step, we determine . First, let , and the parameter matrix . Combining equation (48) with (31), then
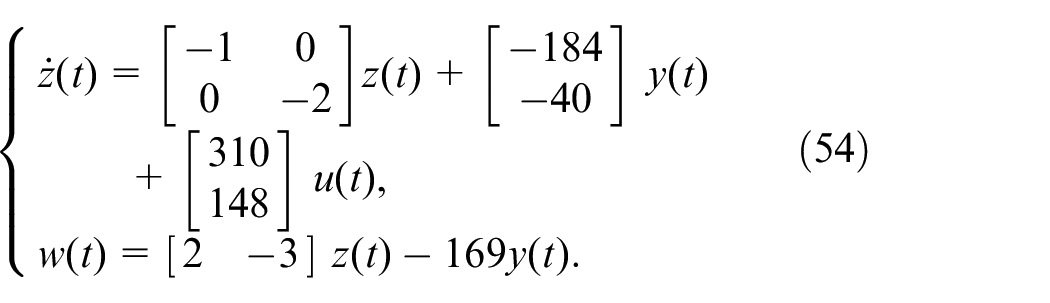
It is obvious that Constraints 2 is not satisfied, go back, let ,
Then, according to Theorem 2, we can obtain the second-order delay-free Luenberger-type observer as follows
Due to the upper bound is , there exists a second-order delay-free Luenberger-type observer.
Remark 4.The method proposed by Trinh et al. needs to satisfy some suitable constrains. [30] Unfortunately, under the condition that and , the second-order observer does not exist, that is, the problem of estimating the function can not be solved by Trinh et al.40Unlike Trinh et al.’s method, the proposed approach in this paper solves the problem and provides the free parameter matrix in the observer design.
We choose the following initial conditions
, and , meanwhile, Figures 3 and 4 are the simulation results.
The estimated state, observation curves of proposed method.
Estimation errors.
Figures 3 and 4 show the output of the observer and the estimated state, and the estimation errors, respectively. From Figures 3 and 4, it is clear that the proposed observer can track the estimated state quickly and accurately.
Example 3
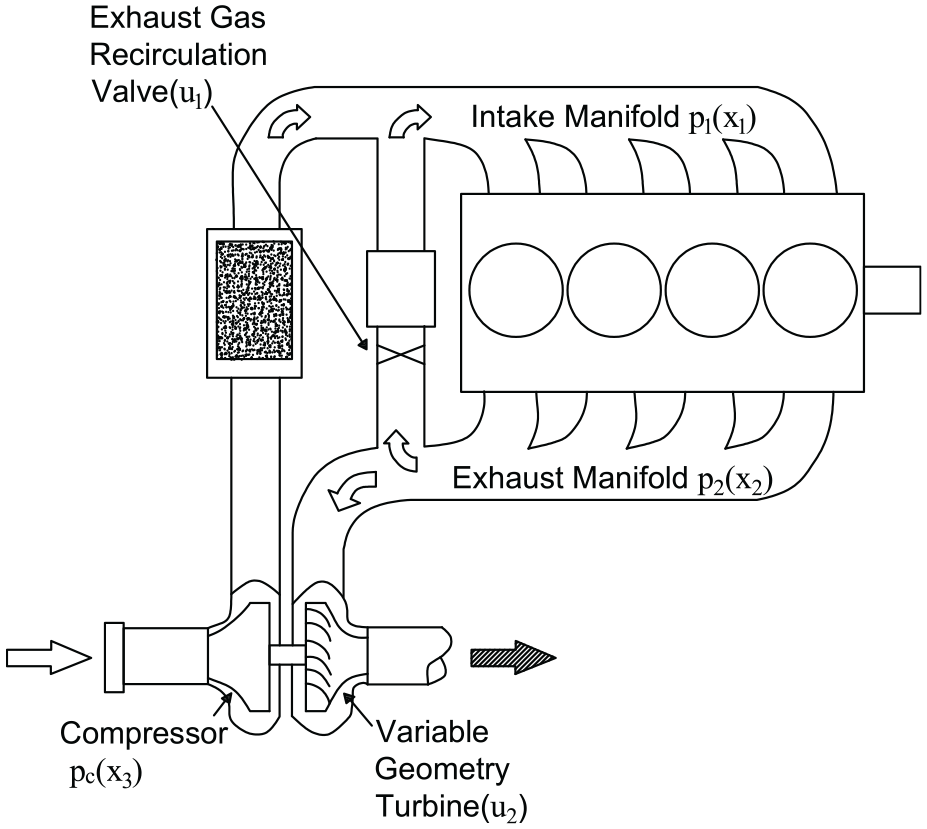
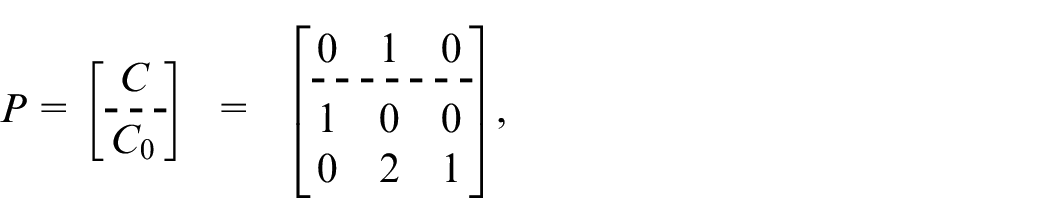
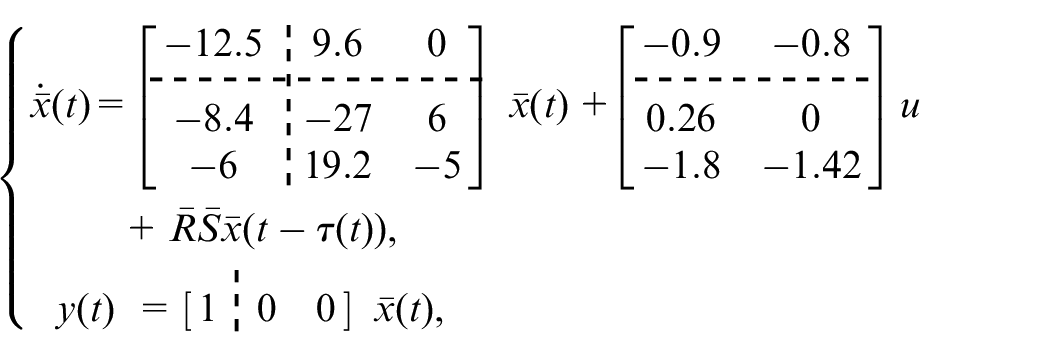
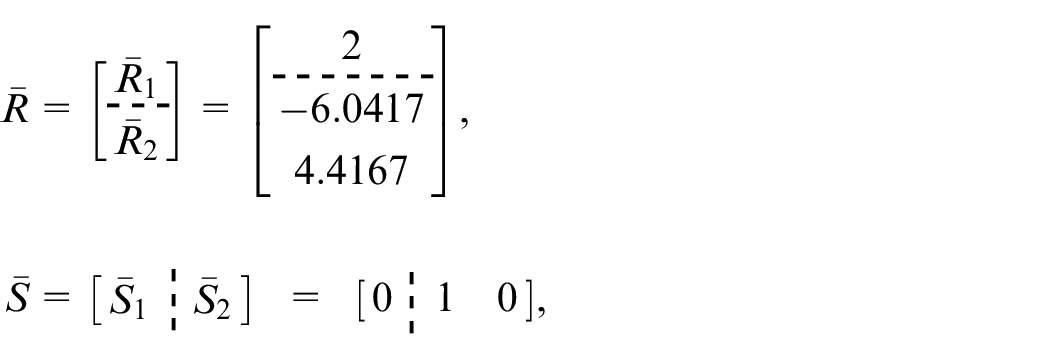
Consider the system consisting of a diesel engine and turbo compressor shown in Figure 5.43 Due to the existence of intake-to-exhaust transport delay, the system becomes a typical nonlinear system model with time-delay. The linearized model was presented by literature.44 The mathematical model of this system can be written in the form of system (1)
Diesel engine system model.
The state vector and the control input vector can be written as
with the variables , , and , represent intake manifold pressure, exhaust manifold pressure, compressor power, control inputs for valve opening and the turbine, respectively.
The scalar function is given by
We choose the nonsingular matrix as
and the following system is obtained based on the equation (21)
where
and the linear functional is given as
Then, we can verify that RCF (16) is correct, and
Next step, we determine . First, let , and the parameter matrix . Combining equation (58) with (31), then
Obviously, Constraint 2 does not satisfy, go back, let ,
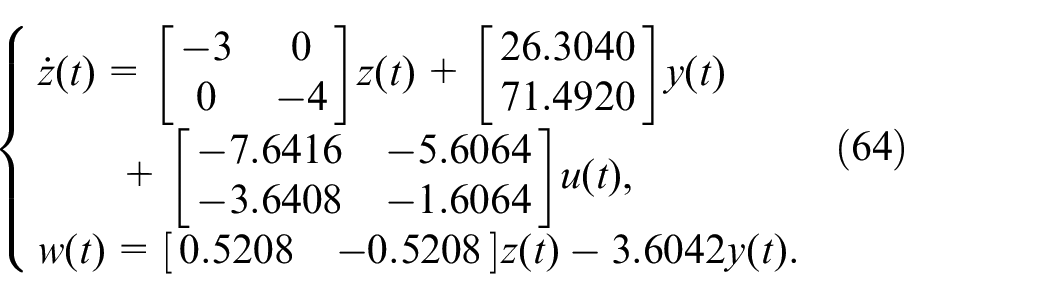
Then, according to Theorem 2, we obtain the following second-order delay-free Luenberger-type observer
Due to the upper bound is , there exists a second-order delay-free Luenberger-type observer. We choose the , as
, and , , meanwhile, Figures 6 and 7 plot the simulation results.
The estimated state, observation curves of proposed method.
Estimation error.
Figure 6 shows the output of the observer and the estimated state, and Figure 7 shows the estimation errors. From Figures 6 and 7, it is clear that the proposed observer can track the estimated state quickly and accurately.
Conclusions
In this work, the problem of delay-free function observer design has been investigated for LTI systems with time-varying delay. First, the proposed observers are reduced-order and delay-free which makes engineering practicability attractive in terms of cost economy. Then, the condition for the existence and the generally parameterized expression of the design observers have been provided. Furthermore, with the parametric approach, the parameters matrix provides degrees of freedom. With the parameters, we can optimize the observer parameters to achieve the expected performance. Finally, based on three examples demonstrate the feasibility of the approach.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Science Center Program of the National Natural Science Foundation of China under grant No. 62188101, and also by the Major Program of the National Natural Science Foundation of China (61690210, 61690212).
ORCID iD
Jun Zhao
References
1.
LuenbergerD. Observers for multivariable systems. IEEE Trans Automat Contr1966; 11(2): 190–197.
2.
LuenbergerD. An introduction to observers. IEEE Trans Automat Control1971; 16(6): 596–602.
3.
NematiFSafavi HamamiSMZemoucheA. A nonlinear observer-based approach to fault detection, isolation and estimation for satellite formation flight application. Automatica2019; 107: 474–482.
4.
LiuHLiS. Speed control for PMSM servo system using predictive functional control and extended state observer. IEEE Trans Ind Electron2012; 59(2): 1171–1183.
5.
YaoJJiaoZMaD. Adaptive robust control of DC motors with extended state observer. IEEE Trans Ind Electron2014; 61(7): 3630–3637.
6.
JoNHSeoJH. A state observer for nonlinear systems and its application to ball and beam system. IEEE Trans Automat Contr2000; 45(5): 968–973.
7.
JiangGPTangWKSChenG. A state-observer-based approach for synchronization in complex dynamical networks. IEEE Trans Circuits Syst I Regul Pap2006; 53(12): 2739–2745.
8.
DarouachM. Existence and design of functional observers for linear systems. IEEE Trans Automat Contr2000; 45(5): 940–943.
9.
FernandoTLJenningsL. Functional observability and the design of minimum order linear functional observers. IEEE Trans Automat Contr2010; 55(5): 1268–1273.
10.
GuDKLiuLWDuanGR. A parametric method of linear functional observers for linear time-varying systems. Int J Control Autom Syst2019; 17(3): 647–656.
11.
RotellaFZambettakisI. On functional observers for linear time-varying systems. IEEE Trans Automat Contr2013; 58(5): 1354–1360.
12.
GuDSunLLiuY. Parametric design of functional observer for second-order linear time-varying systems. Asian J Control. Epub ahead of print 4May2022. DOI: 10.1002/asjc.2843
13.
BernardPAndrieuV. Luenberger observers for nonautonomous nonlinear systems. IEEE Trans Automat Contr2019; 64(1): 270–281.
14.
GuDLiuLDuanG. Functional interval observer for the linear systems with disturbances. IET Control Theory Appl2018; 12(18): 2562–2568.
15.
BezzaouchaSVoosHDarouachM. A new polytopic approach for the unknown input functional observer design. Int J Control2018; 91(3): 658–677.
16.
GuDKSunLSLiuYD. Parametric design to reduced-order functional observer for linear time-varying systems. Meas Control2021; 54(7–8): 1186–1198.
17.
GuDSunLLiuY. Reduced-order functional observers for descriptor linear time-invariant systems: a parametric method. Int J Adapt Control Signal Process2022; 36(3): 562–578.
18.
GuDKLiuQZLiuYD. Parametric design of functional interval observer for time-delay systems with additive disturbances. Circuits Syst Signal Process2022; 41(5): 2614–2635.
19.
LiuLXieWZhangL, et al. Time-dependent Luenberger-type interval observer design for uncertain time-varying systems. Int J Robust Nonlinear Control2022; 32(7): 4195–4213.
20.
HeYLiuGReesD. New delay-dependent stability criteria for neural networks with time-varying delay. IEEE Trans Neural Netw2007; 18(1): 310–314.
21.
YangSLiuQWangJ. Distributed optimization based on a multiagent system in the presence of communication delays. IEEE Trans Syst Man Cybern Syst2017; 47(5): 717–728.
22.
MehrkanoonSShardtYAWSuykensJAK, et al. Estimating the unknown time delay in chemical processes. Eng Appl Arti Intell2016; 55: 219–230.
23.
ZhouBLuoW. Improved Razumikhin and Krasovskii stability criteria for time-varying stochastic time-delay systems. Automatica2018; 89: 382–391.
24.
ZhouB. Construction of strict Lyapunov–Krasovskii functionals for time-varying time-delay systems. Automatica2019; 107: 382–397.
25.
GuDZhangDLiuY. Controllability results for quasi-linear systems: Standard and descriptor cases. Asian J Control. Epub ahead of print 18June2021. DOI: 10.1002/asjc.2593
26.
GuDKWangRYLiuYD. A parametric approach of partial eigenstructure assignment for high-order linear systems via proportional plus derivative state feedback. AIMS Math2021; 6(10): 11139–11166.
27.
GuDWangS. A high-order fully actuated system approach for a class of nonlinear systems. J Syst Sci Complex2022; 35(2): 714–730.
28.
BhatKKoivoH. An observer theory for time delay systems. IEEE Trans Automat Contr1976; 21(2): 266–269.
29.
ZhengGBejaranoFJPerruquettiW, et al. Unknown input observer for linear time-delay systems. Automatica2015; 61: 35–43.
30.
ZhengGBejaranoFJ. Observer design for linear singular time-delay systems. Automatica2017; 80: 1–9.
31.
WangZLamJBurnhamKJ. Stability analysis and observer design for neutral delay systems. IEEE Trans Automat Contr2002; 47(3): 478–483.
32.
TrinhH. Linear functional state observer for time-delay systems. Int J Control1999; 72(18): 1642–1658.
33.
TrinhHHuongDCHienLV, et al. Design of reduced-order positive linear functional observers for positive time-delay systems. IEEE Trans Circuits Syst II Express Briefs2017; 64(5): 555–559.
34.
YuanYWangYGuoL. Force reflecting control for bilateral teleoperation system under time-varying delays. IEEE Trans Ind Inform2019; 15(2): 1162–1172.
35.
HouMZitekPPattonRJ. An observer design for linear time-delay systems. IEEE Trans Automat Contr2002; 47(1): 121–125.
36.
DarouachM. Linear functional observers for systems with delays in state variables. IEEE Trans Automat Contr2001; 46(3): 491–496.
37.
DarouachM. Linear functional observers for systems with delays in state variables: the discrete-time case. IEEE Trans Automat Contr2005; 50(2): 228–233.
38.
Leyva-RamosJPearsonAE. An asymptotic modal observer for linear autonomous time lag systems. IEEE Trans Automat Contr1995; 40(7): 1291–1294.
39.
FiagbedziYACheridA. Finite-dimensional observers for delay systems. IEEE Trans Automat Contr2003; 48(11): 1986–1990.
40.
TrinhHMTehPSFernandoTL. Time-delay systems: design of delay-free and low-order observers. IEEE Trans Automat Contr2010; 55(10): 2434–2438.
ZhouBDuanGR. A new solution to the generalized Sylvester matrix equation. Syst Control Lett2006; 55: 193–198.
43.
JankovicMKolmanovskyI. Developments in control of time-delay systems for automotive powertrain applications, chapter 3. Boston, MA: Springer US, 2009, pp.55–92.
44.
JankovicMJankovicMKolmanovskyI. Constructive Lyapunov control design for turbocharged diesel engines. IEEE Trans Control Syst Technol2000; 8(2): 288–299.