
Abstract
Liquid sloshing in moving or stationary containers and flexible uncertainty caused by the slosh are considered to be the most probable causing unexpected coupling effects on the dynamics of many systems such as aerospace, ground vehicles, and high speed industries arms.
The coupling of dynamic liquid slosh in a container system with the uncertainty caused by the sensors or dampers is rare documented and this coupling can be considered as a highly nonlinear system.
In this paper, an investigation is presented to demonstrate a new approach for enabling the reduction of the liquid slosh and uncertainty by implementing adaptive robust wavelet control technique.
Starting by creating the mathematical dynamic model for the nonlinear slosh coupled by uncertainty, adaptive robust control based wavelet transform is applied for calculating optimal motion that minimize residual slosh and uncertainty.
Subsequently the adaptive robust control based wavelet network approximation and the appropriate parameter algorithms for the container system with slosh and uncertainty are derived to achieve the feedback linearization, adaptive control, and H∞ tracking performance.
The simulation results show that the effects of slosh errors and external uncertainty can be successfully attenuated within a desired attenuation level.
Keywords
Introduction
The liquid sloshing in a partially filled container has been a significant problem in many engineering applications. 1
The liquid slosh in the container system can deliver an additional uncertainties to the sensors or dampers. These additional uncertainties can upset the performance of the system and lead to instabilities in some cases.
The uncertainties caused by the liquid slosh in the container system are the result of three error categories:
− Systematic errors which may be due to the models used to quantify the slosh process in the container system under consideration.
− Random errors which may be due to natural variability of the slosh process.
− Spurious errors which may be due to unclear or incomplete mathematical definitions of the slosh.
Thus, it is important to design a controller that can effectively suppress the coupling of slosh and uncertainty to maintain system stability and safe operations.
Numerous researches have tried to provide control solutions to the challenging problems caused by the sloshing dynamics in the container system. 2
In several cases simplified feed-forward control models of container system are used to design stabilizing controllers without using any feedback sensors 3 and robust input shaping in some cases. 4
Additionally, there have been several approaches based on numerical analysis, modeling, and simulation of parametric liquid sloshing in the container.5–7
Due to the fact that the feed-forward control model are extremely sensitive to the external errors which occurred in the container system, thus the feed-back control has been applied to eliminate the slosh of the liquid in the container system. The feed-back control methods are used by creating a specified motion with the using of a feedback sensors, which will reduce the residual amount of the slosh of the liquid in the container system.
These methods include PI/PID control,8–11 H-infinity control, 12 sliding mode control,13–15 predictive controller, 16 active force control, 17 genetic algorithm, 18 control the robot end-effector movement by using Lyapunov-based feedback controllers 19 and variable gain by using super-twisting algorithm. 20
There also exist a passive control methods which tried to smooth the liquid’s sloshing without direct measurements of the sloshing state such as intermittent air-bubble injection method, 21 inverse dynamic control technique by generating a computer model to estimate the modes of oscillation of the liquid in the container system, 22 guidance, navigation, and control (GNC) algorithm commands thruster firings to counter the fluid slosh forces 21 and a shallow-depth sloshing absorber. 23
Apart from the above reviewed control methods, it is noticed that the solutions for the problem of the liquid slosh produced by many researches had been suffered from the following problems:
The slosh and uncertainty combination was unavailable during the design of the mathematical model.
When the control algorithms were designed, the modeling of the slosh had not been considered as an additional source of uncertainty.
Many researches are based on the use of the linearized dynamic models to control the slosh. This traditional methods are extremely produced an additional uncertainty errors in the unmodeled dynamics of the container system.
In this paper an adaptive robust wavelet control technique is suggested to perfectly approximate the nonlinear combination of the slosh and uncertainty.
The suggested method considered the adaptive wavelet networks as a rough tuning control for the approximation of the nonlinear combination of slosh and uncertainty, and the
In addition, a pendulum model was developed to represent the slosh in the container system in presence of mismatched uncertainties.
The modeling of uncertainty which is due to the liquid slosh in the container system is considered to be an additional random errors that is compensated asymptotically by the robustness of the control algorithm. Finally an adaptive robust wavelet controller is designed to achieve system stabilizing,
Modeling of liquid slosh
A commonly used model to represent the slosh in the container system is a simple pendulum 24 as shown in Figure 1.
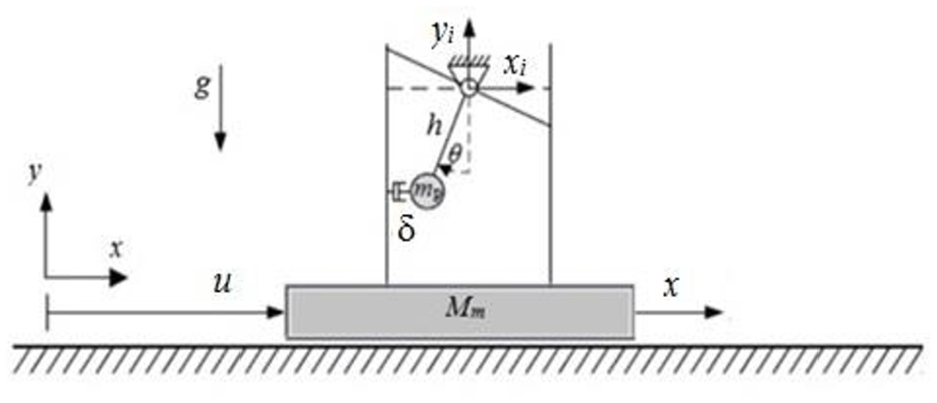
A simple pendulum representation for the slosh container system.
From Figure 1 it can be shown that the nonlinear model of the pendulum is configured from the horizontally movable cart with mass
Subsequently the system coordinate can be defined with two variables,
In the x-direction, the force equilibrium gives that the external force on the system must equal the x-directed force that affect the pendulum mass plus the force on the cart. In equation form it can be represented as:

Where ω is an additional disturbance input due to the slosh effects which represents the uncertainty.
Denoting that the combination of slosh and uncertainty can be defined as:

The time-dependent center of gravity location of the pendulum mass is given by the coordinates (xi, yi). Thus the location of the center of gravity of the pendulum mass is simply written as:

Substituting in equation (1) yields

By noting the following definitions:
also
Thus

Since the perpendicular component of the force and the pendulum length h are available, Thus the torque balance on the pendulum can be also achieved. The resultant balance can be written as:

Where the force components fx and fy, can be written as:



The nonlinear equation (10) includes the combination of slosh and uncertainty and can be reformed and put into the standard state form as:

And

Denoting that:

Then:

Multiplying both sides by cos(θ) gives
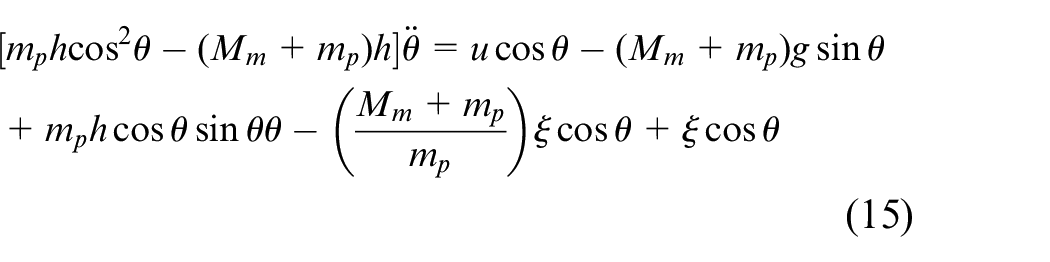
If

Adaptive feedback linearization control for the slosh in the container system
The approximately linearized model of the slosh in the container system can be written in a simple form as 25 :

With the control input u∈Rn and A, D :Rn→ R
if xr∈Rn is considered to be the desired trajectory reference which must be uniformly bounded and continuously differentiable, then

To achieve the tracking control goal, the appropriate control law can be derived base on the using of the adaptive feedback linearization technique and defining

Where

Note that the coefficients
Thus the error dynamic of the container system can produced the following formula:

The error dynamic

Where:
And

Because of the high nonlinear impact of combination of the slosh and uncertainty ξ, the sub-boundaries of both A(x) and D(x) will be consistently obscure and hard to be recognized. Along these lines it can be stated that the above plan strategy can be embraced only if A(x) and D(x) are known precisely and not permanently uncertain.
Adaptive wavelet network design for the slosh container system
Due to the combination of the slosh and uncertainty in the container system, the parameters of A(x) and D(x) will be permanently uncertain. Therefore the adaptive strategies must be adopted as a wavelet network based adaptive algorithm by using the following wavelet networks 27 :


The optimal parameter

Then by the certainty equivalent principle, the adaptive wavelet control law can be implemented as follows 29 :

by substituting in equation (17) yields:
Thus, the corresponding error dynamic can be rewritten as:
For achieving the best approximation, equation (27) can be rewritten in the form:

Where

The wavelet networks

Design H∞ tracking control based on the adaptive wavelet network
According to equation (23), the tacking control law in equation (19) could have an adaptive wavelet network control law as29–35:

With:

And the optimal approximation of:


Where

where
The solution of the Riccati-equation equation (35) is achieved when the matrices P and Q are definite and symmetric.31–33
Based on the adaptive scheme for
Where
Based on equation (36) and with appropriate positive definite symmetric matrices Q = QT, P = PT, positive weighting factors
In order to achieve solution of Riccati-equation, it tends to be demonstrated that the following accompanying condition must be likewise fulfilled:

The
In addition, the control variable
Results and discussion
In this study, a numerical example is proposed to demonstrate the feasibility and effectiveness of the developed method used by considering the slosh container system in equation (16). The combination of slosh and uncertainty

Based on equation (16) it is assumed that the position state
The reference states for both position and velocity used in this simulation is assumed to be in the following form:

Indeed, the following data used in the simulation:
The mass of the cart Mm = 1 kg, the mass of the pendulum mp= 0.2 kg, the length of the pendulum h = 0.4 m and the gravity acceleration g = 9.81 m/sec2.
To construct the matrix
Furthermore, in this simulation 100 hidden layer nodes are formed by the wavelet function.
According to equation (23) the initial values of the Gaussian function centers
Additionally, Wi is randomly assigned with
The positive definite matrix P is randomly assigned Pmin = 0.1 and Pmax = 0.9 for all i = 1,…,100.
Finally the positive weighting factors
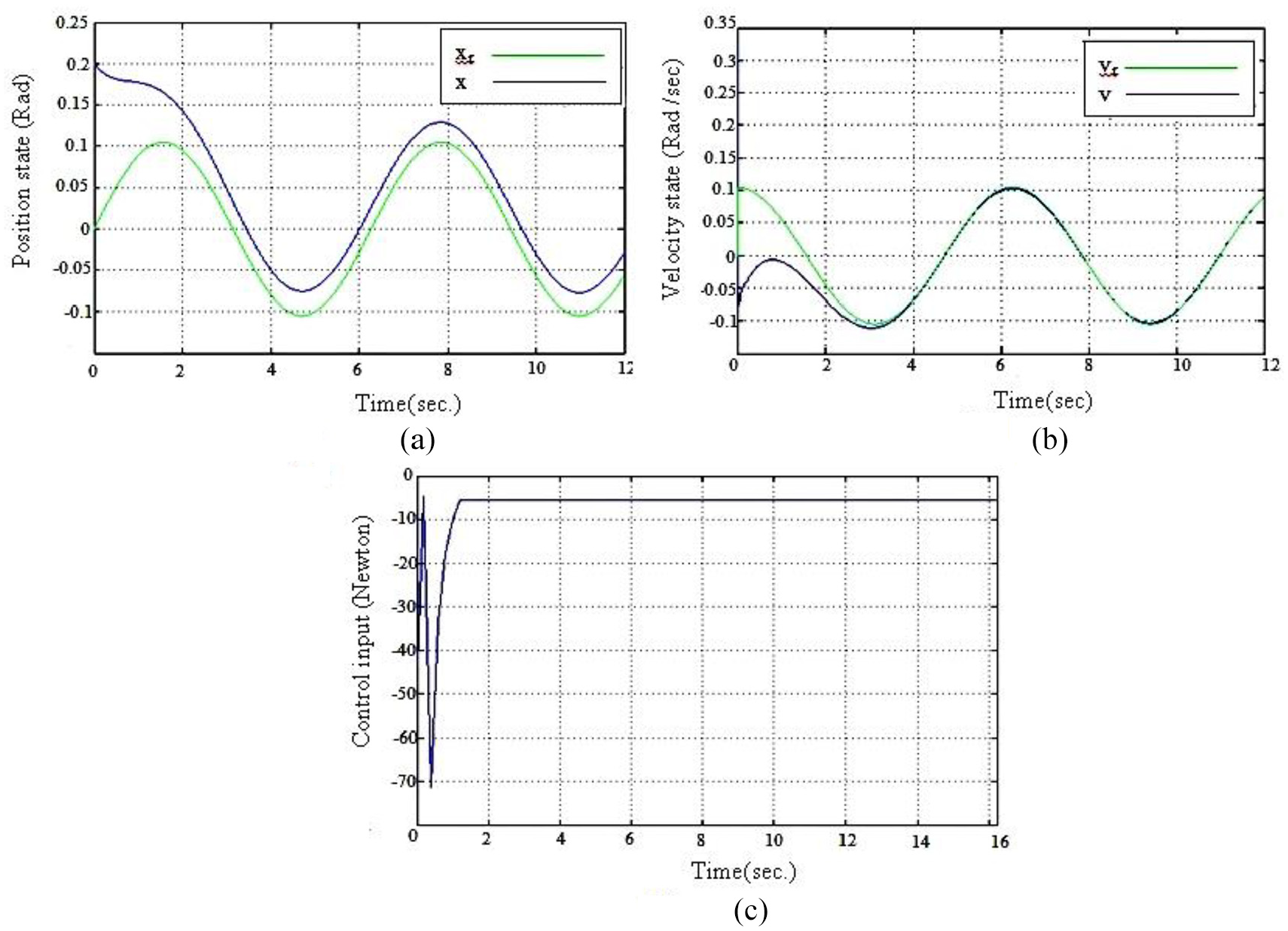
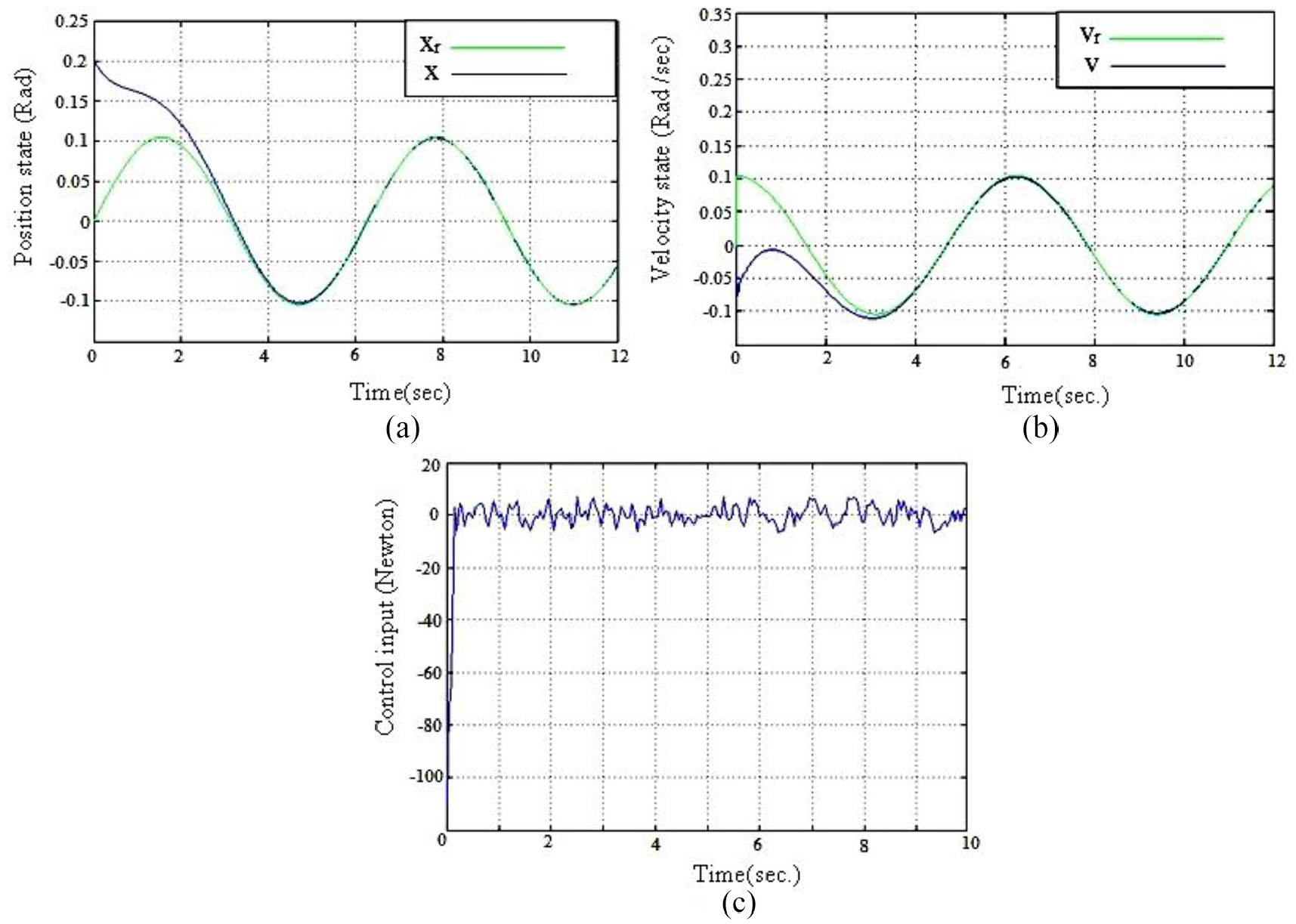
Adaptive feedback linearization control test. (a) Position state tracking, (b) Velocity state tracking, (c) The control input.
It is obvious from Figure 2 that the position state couldn’t track the reference state impeccably due to the nonlinear impact of the combination of the slosh and uncertainty. Moreover the impact of the control input stayed consistent and with no change regardless of non-tracking. This implies that the control input from the moment t = 1.8 s was unable to lessen the effect of the errors caused by the combination of both slosh and uncertainty. Thus the tracking error for the position state can be shown in Figure 3.
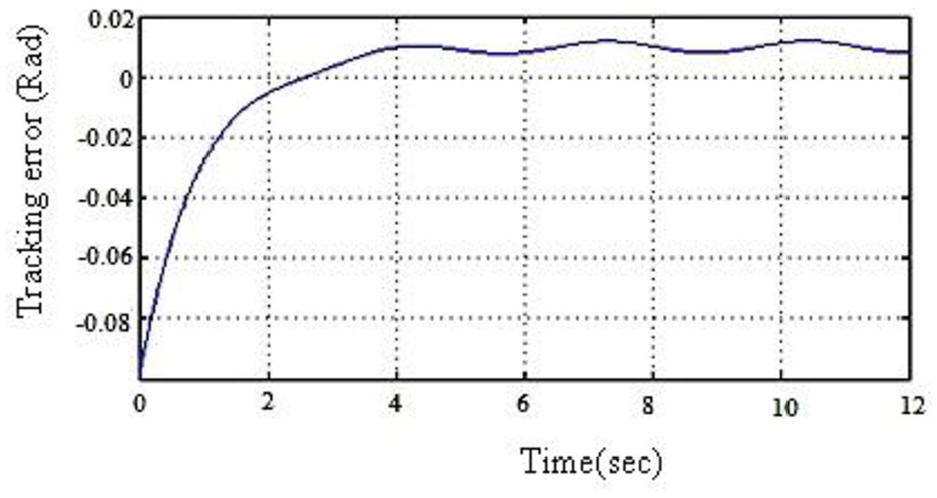
Tracking error for position state using adaptive feedback linearization control technique.
i. by using the Adaptive wavelet Control method for the slosh container system with approximation wavelet function PolyWOG1 and (r = 0.04), the position, velocity, and input control will take the shape shown in Figure 4.
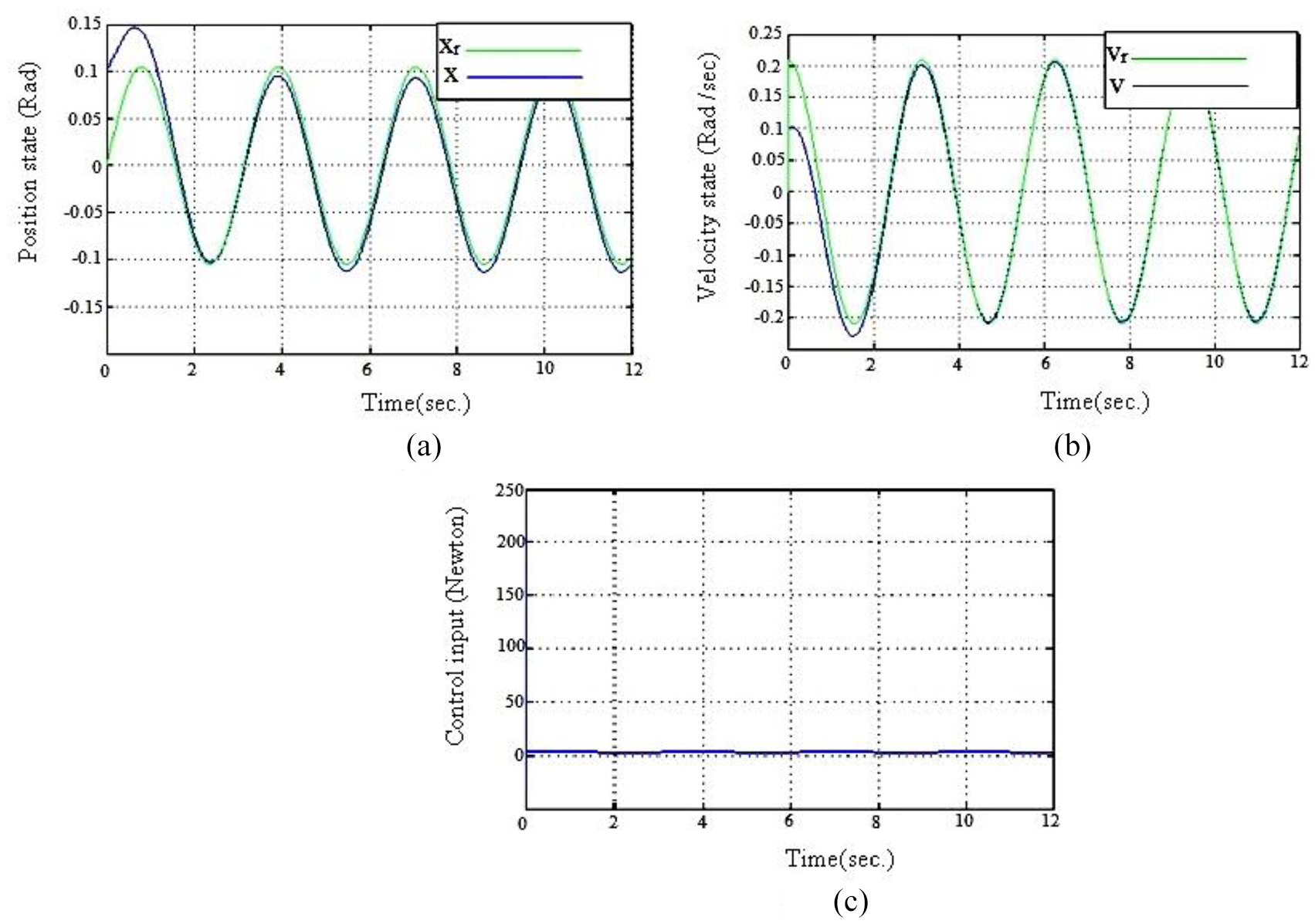
ii. by using the Adaptive wavelet Control for the slosh container system with approximation wavelet function POLYWOG1 and (r = 0.06), the position, velocity and input control will take the shape shown in Figure 5.
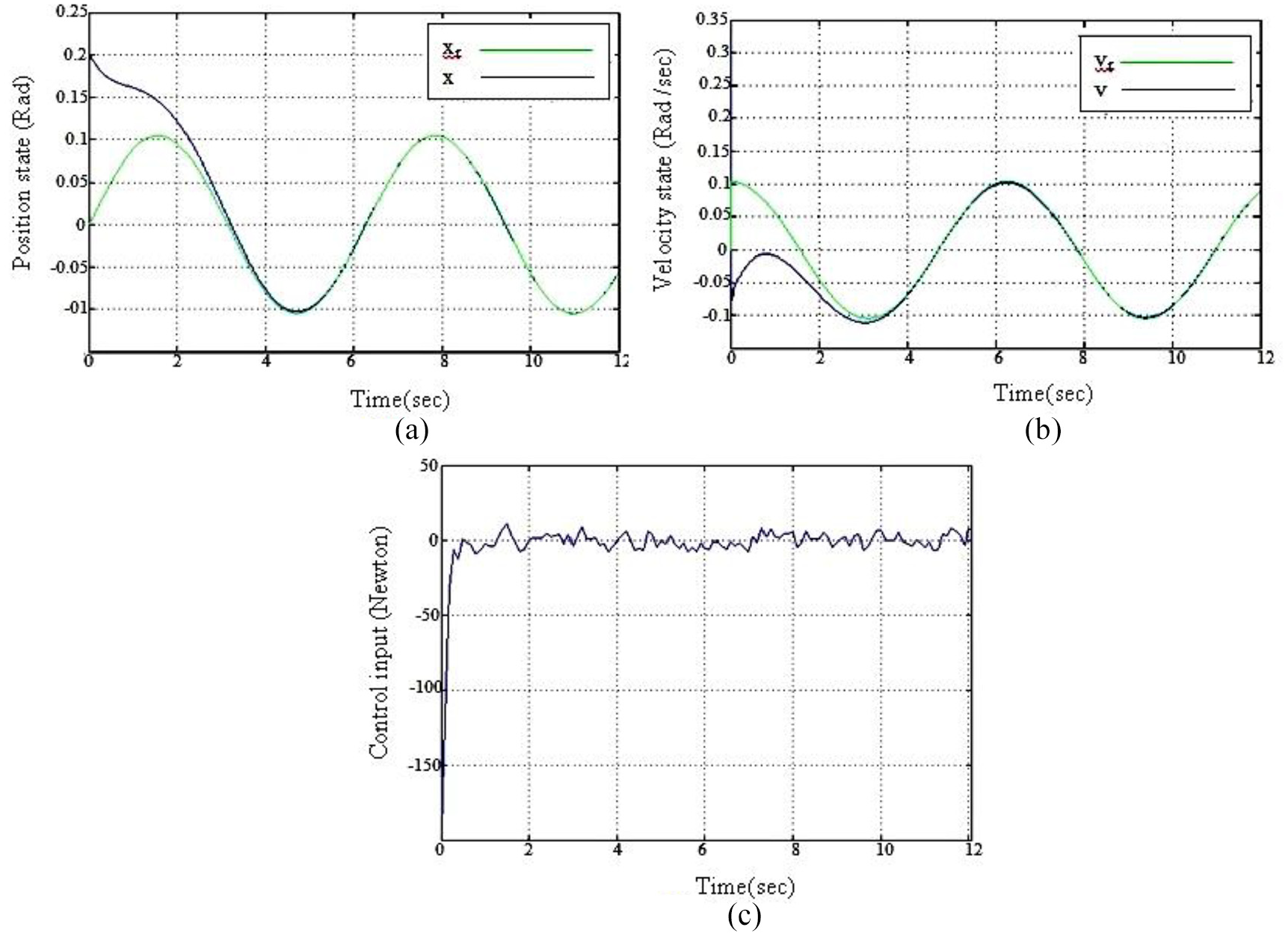
Test (r = 0.04) using POLYWOG1 wavelet. (a) Position state tracking, (b) Velocity state tracking, (c) The control input.
Test (r = 0.06) using POLYWOG1 wavelet. (a) Position state tracking, (b) Velocity state tracking (c) The control input).
According to Figures 4 and 5 it is obvious that the position state
iii. by using the Adaptive wavelet Control method for the slosh container system with approximation wavelet function Shannon and (
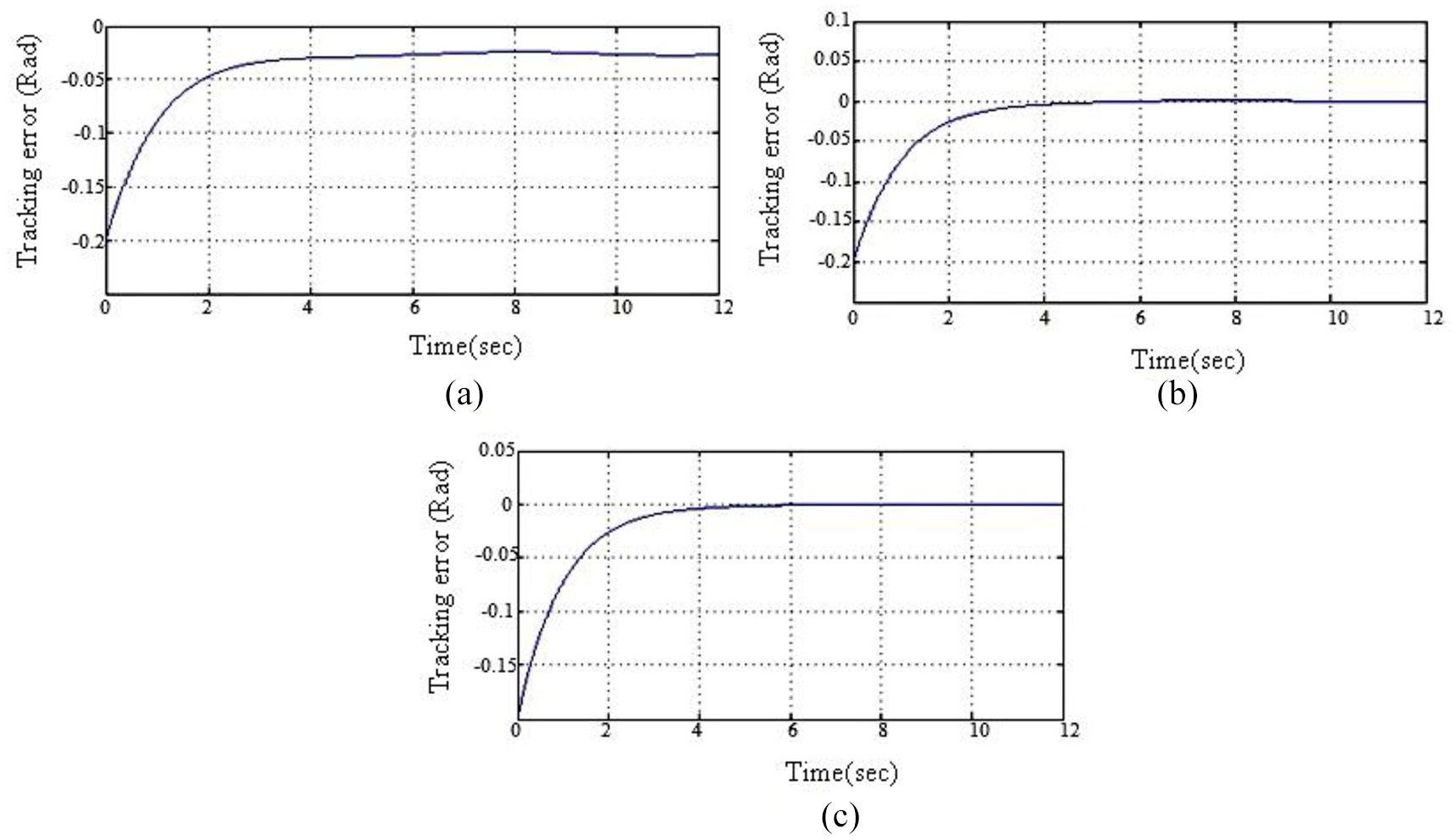
Adaptive tracking error (using POLYWOG1). (a) r = 0.04, (b) r = 0.06, (c) r = 0.08).
Test (r = 0.06) using Shannon wavelet. (a) Position state tracking, (b) Velocity state tracking, (c) The control input).
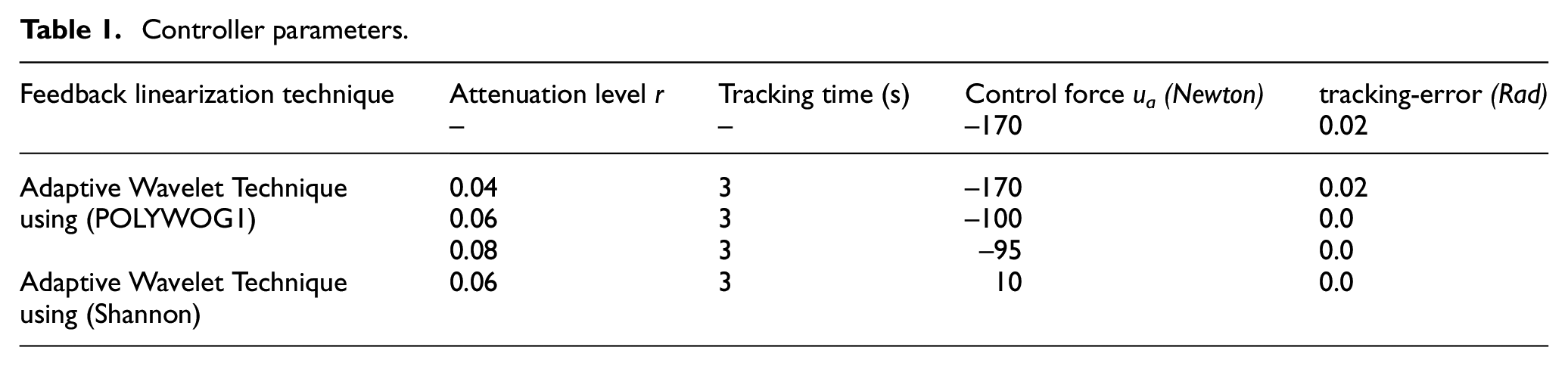
Table 1 shows the comparison between the feedback linearization technique and the adaptive wavelet technique with two families of approximation wavelet transforms POLYWOG1 and Shannon.
Controller parameters.
Conclusion
In this study it is shown that the simplest possible approach of the linearized pendulum equation is not sufficient to describe the liquid slosh data in the container system.
The container system in this approach presented as a nonlinear uncertain system which has a combination of the slosh and uncertainties in both system and input matrices.
An adaptive wavelet robust method has been proposed to enhance the damping of the slosh dynamics in the container system. A comparison was made between the traditional feedback linearization technique and the suggested technique. Three families of approximation wavelet transforms has been used to show the effectiveness of the method used.
Finally, the presented methodical approach thus allows for the provision of model for slosh motion control and optimization in the container systems.
Footnotes
Appendix A
Appendix B
In general the mother wavelet function can be described by the general form as:
Where
The wavelets network architecture used in this paper is shown below:
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.