
Abstract
The aim of this study is to investigate nonlinear DC motor behavior and to control velocity as output variable. The linear model is designed, but as it is experimentally verified that it does not describe the system well enough it is replaced by the nonlinear one. System’s model has been obtained taking into account Coulomb and viscous friction in the firmly nonlinear environment. In the frame of the paper the dynamical analysis of the nonlinear feedback linearizing control is carried out. Furthermore, a metaheuristic optimization algorithm is set up for finding the coefficient of the proportional-integral feedback linearizing controller. For this purpose Gray wolf optimization technique is used. Moreover, after the introduction of the control law, analysis of the pole placement and stability of the system is establish. Optimized nonlinear control signal has been applied to the real object with simulated white noise and step signal as disturbances. Finally, for several desired output signals, responses with and without disruption are compared to illustrate the approach proposed in the paper. Experimental results obtained on the given system are provided and they verify nonlinear control robustness.
Keywords
Introduction
Direct current (DC) motors are mostly used in industries where velocity is required to keep accurate adaptation, or where low-velocity torque is needed, for example electric vehicles, steel rolling mills, electric cranes, and robotic manipulators due to precise, wide, simple, and continuous control characteristics. 1 Also, it is extremely important to describe the response feature and fatigue life of certain structures. 2 As manufacturing sector represents the first momentum of Energy-Based Maintenance evolution, and technology transfer activities are necessary, 3 it is of great importance to research well and know all the possibilities, elements, and machines that drive production. There are several possibilities within brushed motors. One with the permanent magnet, shunt, series, and combination of the last two-compound. They are all suitable for usage in different applications in industry. This paper investigates series wound DC motor which can supply varying voltage.
Many different techniques can be applied to control the velocity of the output series DC motor shaft. Frequently used are, surely, conventional methods such as traditional feedback control: proportional-integral-derivative (PID) like controllers. They have low prices (compared to more complicated control systems), they are simple and different variants of this control systems (proportional-integral PI or proportional-derivative PD) manage to keep the output of the system well matched with the set value within the error limits. On the other hand, they suffer due to lack of robustness. 4
Other than conventional, there are many nonlinear controllers. Some of them use adaptive control technique, because the estimated velocity is heavily contaminated by noises from the switching signals. This direct method nullifies the merit of the sliding mode observer. 5 In order to overcome the boundaries of model reference adaptive control several are built from Artificial Neural Network (ANN), like it was proposed in the papers.6,7 ANNs enable estimating and controlling velocity for a separately excited DC machine and it is one of the most important modern techniques. The rotor speed of the machine can be made to follow an arbitrarily selected trajectory, especially when the motor and load parameters are unknown. In Alhanjouri 8 these two neural networks are trained by Levenberg-Marquardt back-propagation algorithm. Simulation results indicates to the advantages, effectiveness, good performance of the artificial neural network controller, which is illustrated through the comparison obtain by the system. In nonlinear system, self-tuning ANNs technique is related to linearization of model at operating time interval. This may produce error because of linearization of nonlinear model and cannot control the speed accurately. 1
In general, the control of system is difficult due to high nonlinearity properties. To overcome this difficulty, another technique, which include Fuzzy Logic Controller (FLC) can be developed. 9 FLC is just one of the intelligent controllers and represents a widespread control technique as it has satisfactory performance for nonlinear and complex systems. Basic character and the aim of this control strategy is to take advantages of knowledge and the control experience of the operator for intuitive synthesis of the control system. Analysis and comparison with classical PID control, sliding control, adaptive control, etc., that is, by conventional control techniques, have led to the results which were also used for the analysis of stability and quality of dynamic behavior. 10 The fuzzy design can be considered as an optimization problem, where the structure, antecedent, and consequent parameters are required to be identified.
Global optimization problems are difficult to be solved efficiently because of their high nonlinearity and multiple local optima. Nonetheless, with nonlinear equations it is senseless examining system’s stability, but one can check the stability of the separate equilibriums. System which has two equilibrium points can initially be in equilibrium number one, which is unstable. When the disturbance is applied, it can happen that the second equilibrium attracts trajectory and the state can converge in the second equilibrium. 11 Therefore it is necessary to check whether the global minimum time of motion is actually realized by the obtained solution. 12 Finding the optimal solutions represent the basic and challenging task, that is widely studied for decades. Nature has been a major source of inspiration for researchers in the field of optimization. 13
The implementation of metaheuristic algorithms can be solved with nonconvex, nonlinear, and multimodal problems subjected to linear or nonlinear constraints by continuous or discrete decision variables, in the form of global optimization algorithms. For example, differential evolution and genetic algorithms have been used to perform an optimal design of a phase controller to track the trajectory of moving robots.14–16 Some of these algorithma include the genetic algorithm (GA), 17 particle swarm optimization (PSO), 18 whale optimization algorithm (WOA), 19 gray wolf optimization (GWO), 20 etc. Based on 20 GWO technique illustrates its supremacy with an improved version of GWO technique named as IGWO. This controller was proposed and demonstrated for step load disturbances, stochastic load disturbances, and varied conditions. In combination with other nonlinear control systems, these Park et al. 21 as well as the other techniques such as ant colony (AC) 22 and a novel method called the cuckoo search (CS) 23 can be applied.
Although modeling a nonlinearity is often a very complicated challenge, one of the first steps in the synthesis of a control system is to create a mathematical model. This will save time and bring the cost-effectiveness. 24 On the other hand, an exact mathematical models can not be easily obtained. One way to battle this kind of problem is given in the paper which used real coded genetic algorithm with a goal to estimate the unknown system parameters. In order to integrate the resulted system model and the feedback linearizing controller (FBL), the nonlinear robotic system can be transferred to a linear model with a nonlinear bounded time-varying uncertainty. 25
Feedback linearization is the nonlinear control technique which has attracted increasing attention in past decades. 26 By a synergy of a nonlinear transformation and linearization with feedback loop, the nonlinear control design allows the creation of linear control law. 27 The central idea of the approach is to algebraically transform a nonlinear system dynamics into a (fully or partly) linear one, so that linear control techniques can be applied. This differs entirely from conventional linearization in that feedback linearization is achieved by exact state transformations and feedback, rather than by linear approximations of the dynamics. 28 This technique has been successfully implemented in many applications of control, such as industrial robots, high performance aircraft, helicopters, and biomedical dispositifs; more tasks which used this methodology are being now well advanced in industry. 29 In Cambera and Feliu-Batlle 30 the problem of tracking the trajectory of the flexible end effector was solved using FBL method, where the force of gravity and the force of joint friction are taken into account. As relatively simple and easy understandable technique FBL is suitable to be used in nonlinear systems: Aerial Package Delivery Robot, 31 manipulators, 32 and even for a high-DOF robots. 33
An optimal control strategy for a bearingless permanent magnet synchronous machine drive is proposed in Sun et al. 34 The state feedback control (SFC) based on the GWO algorithm is applied. The discretized state model with the augmented integrals of the displacement error and angular speed error is obtained. Then, the weighting matrices are obtained by employing the GWO algorithm. The results show the superiority of the proposed method reflecting in faster response and no overshoot compared with the PI controllers. On the other hand, paper 35 presents an optimal control strategy for a permanent-magnet synchronous hub motor (PMSHM) drive using the state feedback control method plus the gray wolf optimization (GWO) algorithm. To acquire satisfactory dynamics of speed response, the discretized state space model of the PMSHM is augmented with the integral of rotor speed error and integral of current error. Then, the GWO algorithm is employed to acquire the weighting matrices Q and R in liner quadratic regulator optimization process. Finally, comparisons among the GWO-based state feedback controller, the conventional state feedback controller, and the genetic algorithm enhanced PI controllers are conducted in both simulations and experiments. The comparison results show the superiority of the proposed state feedback controller with the penalty term in fast response. Finally, 36 proposes an improved deadbeat predictive controller for PMSM drive systems. It can eliminate the influence of parameter mismatch of inductance, resistance, and flux linkage. A composite sliding mode disturbance observer (SMDO) based on stator current and lumped disturbance is proposed, which can simultaneously estimate the future current value and lumped disturbance caused by the parameter mismatch of inductance, resistance, and flux linkage. Both simulation and experimental performances of the proposed method have been validated and compared with the conventional control methods under different conditions. The comparison results show the superiority of the proposed predictive current control method based on the composite SMDO.
In this paper, the FBL method was used to control the velocity of the DC motor. The feedback linearization is a powerful nonlinear method based on the principle of canceling the nonlinearities of the system model. In most papers dealing with the similar topics of FBL technique application for DC motor control (see Mehta and Chiasson, 27 Moradi et al., 37 Shirvani Boroujeni et al. 38 ) the nonlinear model is made on the basis of flux and motor current nonlinearities. For the purposes of this research, feedback linearization was performed using a mathematical model that takes into account the nonlinearity resulting from friction. Therefore, a nonlinear mathematical model of a DC motor with previously determined friction, in the form of a Tustin model, was adopted. Moreover, a new model was applied in which the discontinuous nonlinearity was approximated by a differentiable nonlinearity of the hyperbolic tangent, which ensured the conditions for the application of FBL. After the feedback linearization method has been successfully utilized to change the nonlinear states of the system to their linear forms, classical PI controller has been implemented for DC motor velocity control. Determining controller gains has been considered as an optimization problem and solved using GWO optimization algorithm, as one of recent metaheuristics swarm intelligence methods. GWO has been widely tailored for a wide variety of optimization problems due to its impressive characteristics over other swarm intelligence methods: it has very few parameters, and no derivation information is required in the initial search. Also it is simple, easy to use, flexible, scalable, and has a special capability to strike the right balance between the exploration and exploitation during the search which leads to favorable convergence. 39 The last contribution of the paper is the demonstration of robustness and good control performances of nonlinear system control against external disturbance and in the presence of noise, through experimental results.
Description of the system
In this Section from the electrical, mechanical, and combined equations we obtain and investigate linear model of the DC motor . Mathematical model and discussion of the model benefit is conducted. Here the experimental verification of the obtained mathematical representation is provided.
The first prominent pace in control design is obtaining the most precise model possible, because it reduces time for task performing. Furthermore, it brings the labor saving, cost-effectiveness, and makes work easier and faster. That is why establishing the valid model is a crucial stage in the practical control problems.
The main aim of modeling DC motor is to find the applied voltage, torque, current, or speed related differential equations. 40 Object is taken to be the DC motor, SRV02 Rotary Servo Base Unit, which has been considered as a single-input-single-output (SISO) system. This object is equipped with the optical encoder and tachometer, for motor position and speed measuring, respectively. 41
A schematic diagram of this series wounded DC motor is given in the Figure 1, where
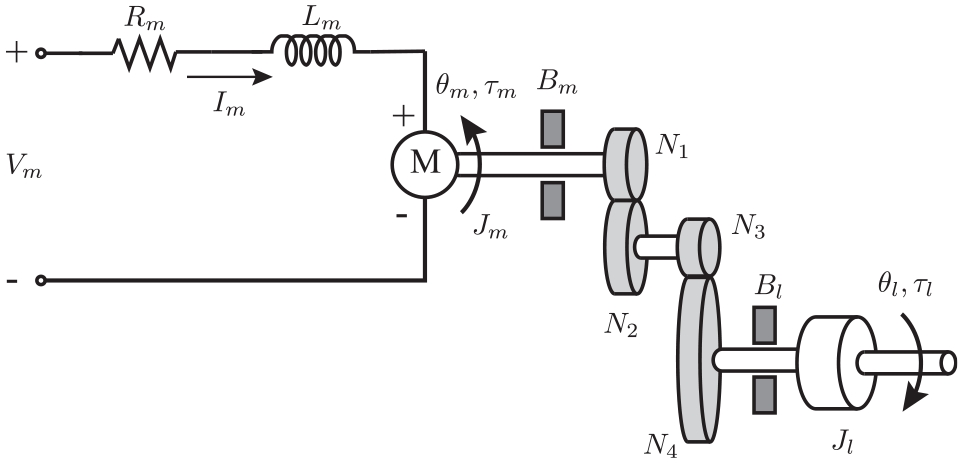
Schematic diagram of the DC motor. 41
As given in the specifications, it is assumed that in the electronic circuit inductance
Linear model of DC motor
The well known linear equation of a DC motor is obtained by combining electrical and mechanical equations and assuming that motor torque is proportional to the voltage.
Choosing the velocity of the load shaft

where:
The numerical values of the DC object.

A DC series motor can serve as a vehicle for the evaluation of the performance of the various controllers. 42
Experimental confirmation of the acquired mathematical representation
Responses of the system are given in the following: Figures 2 and 3. Comparisons were made with the responses obtained by simulations of the linear model, for step and sinusoidal inputs. The responses of the real object and the linear model to the step and sinusoidal excitations do not match well. The model does not follow the actual behavior of the system. Decreasing the amplitude changes only the sign of the deviation. This is because the system is not linear and homogeneity principle could not be applied.

Comparison between real and model output for two step inputs: lower with amplitude 0.3 and higher with amplitude 5.

Comparison between real and model data for sinusoidal input, amplitude 1 and frequency 0.5 rad/s.
The nonlinearity in the form of the dead zone can also be seen in the sine wave. This nonlinearity represents the effect of the friction. It is special expressed in low-frequency sinusoidal functions (and with change of the rotation direction), because then the effect of the friction is most noticeable. It is easy to see that the linear model fails to replicate the response of the system.
Friction phenomenon is the cause of many failures in mechanical parts of mobile systems, and compensation can be encouraged by various constructive solutions, but they do not eliminate nonlinearities at low speeds. In order to obtain the most accurate model of a DC motor and to enable a good synthesis of the control system later, it is necessary to consider and take into account the nonlinearity of friction.
Feedback theory derivation and relative degree of the system
In the following two sections, we will look at the theoretical derivations related to the subject: FBL and GWO algorithms. We will going to need those derivations in order to better understand behavior of the control synthesis, which will be capable of rejection the disturbances in machines.
System described by linear differential equations in the state space is always possible to solve analytically. On the other hand, when an engineer comes across nonlinear equations it is almost regularly impossible to reach an analytical solution. Then, the solution can only be sought numerically.
However, very often, especially when designing, it is convenient to have an analytical solution or at least some analytical guarantees about what the solution looks like. This is important primarily when choosing parameters, because then one can judge in advance, without some complex computational operations, how changing a parameter affects the behavior of the whole system.
Linearization is usually done around the desired equilibrium point and uses approximation with Taylor expansion. The concept of feedback linearization is fundamentally different. It does not use approximation.
Feedback linearization requires exactness in measurements in order to eliminate the nonlinearities from the system.43,44
In this section, the theoretical basis for the implementation of the suggested algorithm will be introduced. Theory derivation rely on Khalil. 11 Of particular relevance will be designing the control signal with the feedback linearization law which will cancel the nonlinearity.
Consider the class nonlinear system 11 :

where
There are four constraints that must be fulfilled in order to achieve this kind of control.
State equation of the system requires the nonlinear state equation in the following form:

where
Pair
All functions has to be differentiable.
With these conditions satisfied control law could be obtained in the following form:
Input-output feedback linearization
Sometimes, it is very cost-effective to perform linearization only from input to output, even if it means that one part of the state equation will remain nonlinear. The only pitfall with this type of linearization is that it does not always take into account the whole dynamics of the system.
It is necessary to determine the relative degree of the system in order to find out will the linearization all of the states be possible, or will the existence of internal dynamics occur. When relative degree of the system is equal to the order of the system Input-Output Feedback Linearization is feasible and full state linearization can be performed. Otherwise, internal dynamics requires further analysis.
The relative degree of a linear system is defined as the difference between the poles and zeros. 24 To broaden this idea to nonlinear systems the following statement is given in Khalil 11 and repeated here for the wholeness:
Relative degree
where Lie derivatives of the function
In order to obtain control law the equation (2) is reconsidered in the single-input-single-output SISO case, when

where

and analogously for
If

By introducing the following equation, the system is linearized by feedback from input to output:

Gray wolf optimization GWO
The gray wolf optimization algorithm (GWO) imitates the hunting procedure, together with the highly organized pecking order and social scale of the gray wolves in environment. In nature, they are mutually loyal and respect the established hierarchy. This hierarchy is important for their survival because the ability to work together increases the chance of success during hunt. There are four different ranks of the wolf in a pack:
So as to achieve a mathematical model of encircling of the prey, the following equations of the distance vector

where
To mathematically simulate the hunting behavior of the gray wolves, hunting process is guided by


Last step is killing the prey:
Simply put, the agents diverge from each other to search for the prey, while they converge to attack the prey. In closing, this is exactly what emphasizes exploration and allows the GWO algorithm to search globally, per say have a broad search. 45 The GWO is able to solve various multimodal problems, obtain reasonable solutions in suitable time and was proven to be efficient for a wide range of problems. All of this assists the GWO to exhibit a more random behavior throughout the optimization process, endorsing exploration, and the local optima avoidance, which can be seen on Figure 4.

GWO flowchart diagram.
Nonlinear DC motor model
In this Section nonlinear model will be analyzed. After the model has been established and verified, optimized feedback linearizing controller will be synthesized. In order to prove the stability of the whole closed loop a stability check will be performed. Also, in this section experimental results are analyzed. Although the speed-torque curve of DC motors could be modeled as in the first Section, it is shown that linear model for DC motor is not suitable enough. The difference between the model and the actual object is too large and noticeable. The main cause of machines nonlinear behavior is the friction and that is why the new model will be considering the velocity-friction dependency.
In this work Tustins friction nonlinear model was adopted as follows:

where
The nonlinear mathematical model is adopted 46 as:

where
Obviously, it is necessary to determine the nonlinear part of the friction moment that originates from Stribeck effect
In order to identify friction for the given DC motor, two distinct experiments were performed. 46
Stribeck effect is most visible for low velocities, so the part of the obtained friction curve

In Gruyitch et al.
46
authors use a line of finite slope, up to a very small threshold
Since one of the conditions that is constraint for using FBL control is that all function are differentiable, the approximation is performed in a different way-using the tangent hyperbolic function. In this way only Coulomb and viscous friction is modeled, the exponential part of the Stribek curve (static friction) is neglected, 24 which is shown on the Figure 5. Satisfactory parameters were found. The general formula of the approximation function is:




Approximation of the friction characteristic.
State variable is chosen as measured, output variable:

With this choice of variables the system still remained of the first order and the state variable is a scalar quantity.
Having the experience with the inaccuracy of the linear model and to check the correctness of the nonlinear model an experiment was again conducted. In the experiment the actual operation of the object was again compared with the nonlinear model.
Conclusion from the Figure 6:
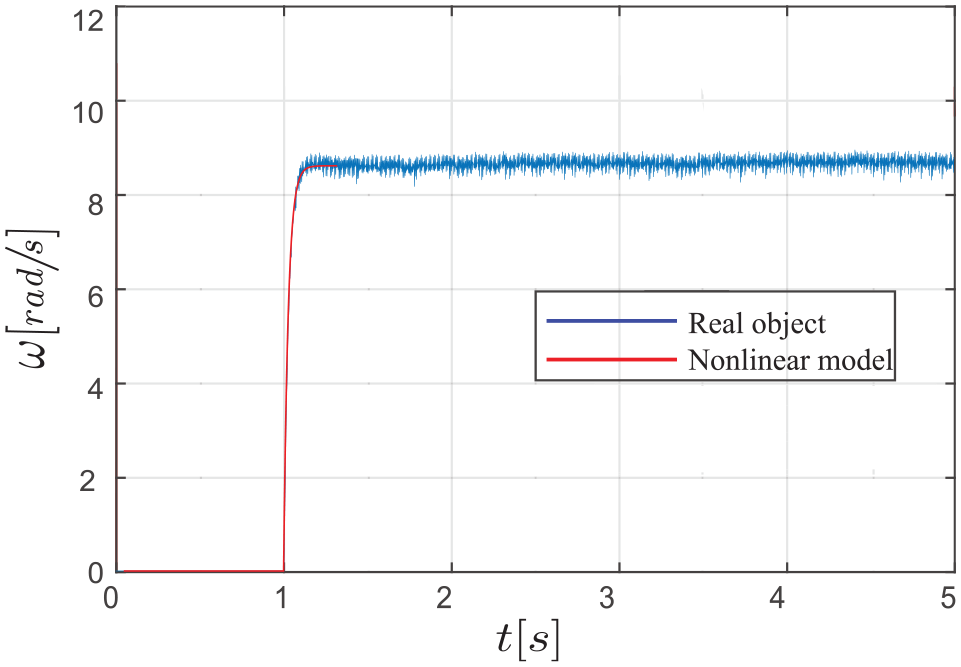
Comparison between real and nonlinear model data for step input, amplitude 5.
With the nonlinear mathematical model response of the system to the step functions of high amplitude is now good modeled. Increased amplitude does not increases the deviation of the model.
Conclusion from the Figure 7:

Comparison between real and nonlinear model data for sinusoidal input, amplitude 1 and frequency 0.5 rad/s.
The response of the real object and the linear model to the sinusoidal excitation was not match well, because linear model was not following the existing nonlinearity. With the nonlinear system that is not the case. Dead zone curve is well modeled.
Conclusion from the Figure 8:

Comparison between real and nonlinear model data for sinusoidal input, amplitude 5 and frequency 0.5 rad/s.
It follows that the nonlinear model quite comparable representation of the original system, for various kind of input signals.
Design of the control law
Checking the fulfillment of the conditions
Taking into account equations (3)–(16) it could be obtained:
Coordinate transformation is not necessary, system is already in the suitable form for the feedback linearization;
Pair
Controllability matrix is defined as:

According to the velocity, system order is equal to

The number of the non-controllable states is equal to the zero.
All functions are smooth because earlier the approximation with the differentiable tangent hyperbolic was made;
It is obvious that the condition
Control signal synthesis for the application of the feedback control method
According to the equations (4)–(17) first derivative of the output is:

As the first derivative of the output depends on the control signal the system has no internal dynamics and the relative degree of the system is equal to the order

The signal

where error
State equation linearized by feedback is:

Optimization of FBC using the GWO algorithm
In this paper, for proper operation it is necessary to set the PI controller parameters and optimize them to get satisfactory dynamic behavior. Further, for the design of the optimal PI controller the metaheuristic GWO optimization algorithm was used. Moreover, the mentioned parameters are all coded into one wolf, that is one agent, that is presented with a vector which contains, in our case, two parameters. For the objective function performance criterion the integral of absolute errors (IAE) is utilized, as:
In the suggested GWO algorithm the number of the search agents is set to 30, while the maximum number of iterations is set to 500. Additionally, one agent represents one potential optimal PI controller. All of the parameter values that were used in the application of the GWO were taken from the original paper. 45 After the optimization the obtained parameters for the scaling factors are:

Stability check and experimental results
From the new state equation (23) and PI gains equation (24) characteristic polynomial poles of the system are easily obtained as:
The output and desired trajectory signals nearly match, with lightweight differences.
As it has been said, conventional control is inappropriate to struggle many problems such as steady-state error, speed changes, and load disturbances. The motion control can be tackled by mechanical or control algorithm to compensate the effect of backlash, friction, and mechanical defects. Several advance intelligent control methods for these purposes are proposed in Mao and Hung. 47
Very important references for verifying the performances of a nonlinear control system are sinusoidal signals in which the direction of rotation of the output shaft changes during operation. From the Figures 9 and 10 it can be seen that system has really fast response. Both, rising and settling time are less than

Velocity tracking of step signal.
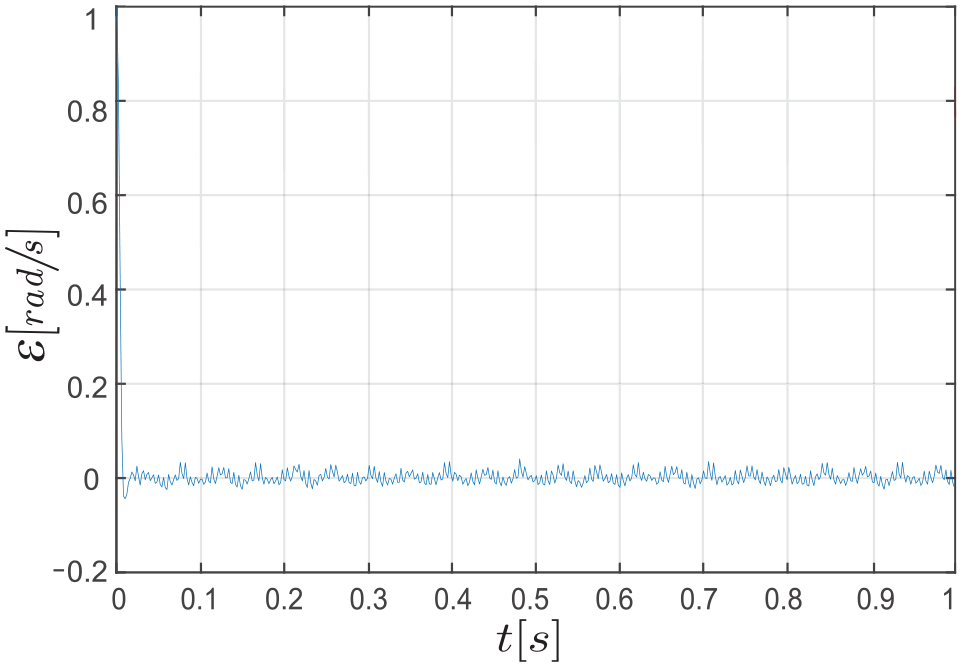
Error signal for velocity tracking of step signal.
Figure 11 shows sinusoidal references for low frequency 0.1 rad/s and Figure 12 shows frequency of 1 rad/s, both with amplitude 1. Moreover, the errors of velocity tracking, are also depicted. The error for the velocity tracking is between ±0.04 rad/s, Figures 13 and 14.

Velocity tracking of sinusoidal signal with small frequency of 0.1 rad/s.
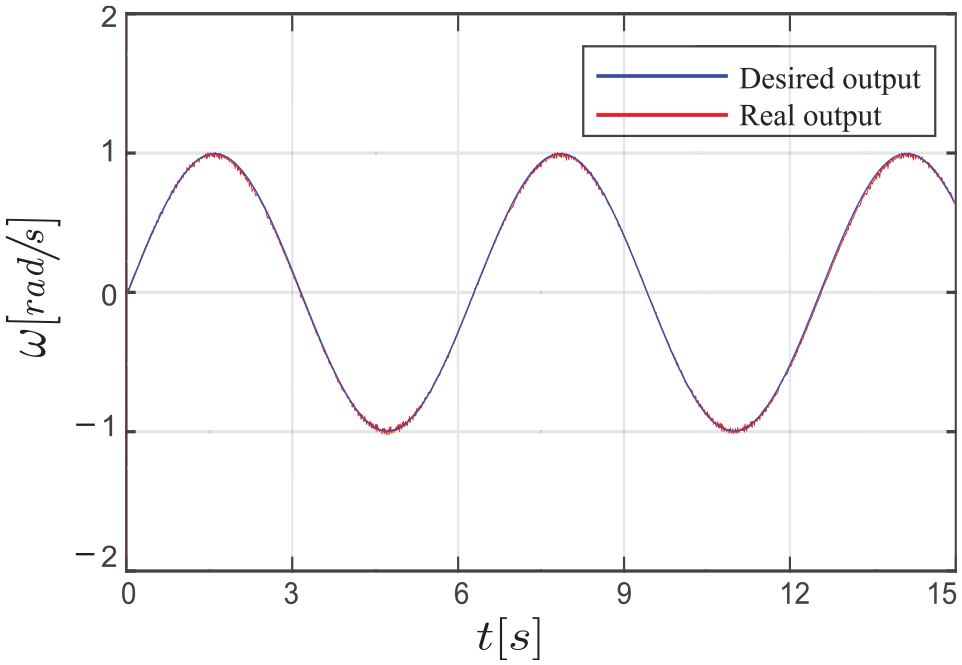
Velocity tracking of sinusoidal signal with frequency of 1 rad/s.

Error signal for velocity tracking of sinusoidal signal with small frequency of 0.1 rad/s.
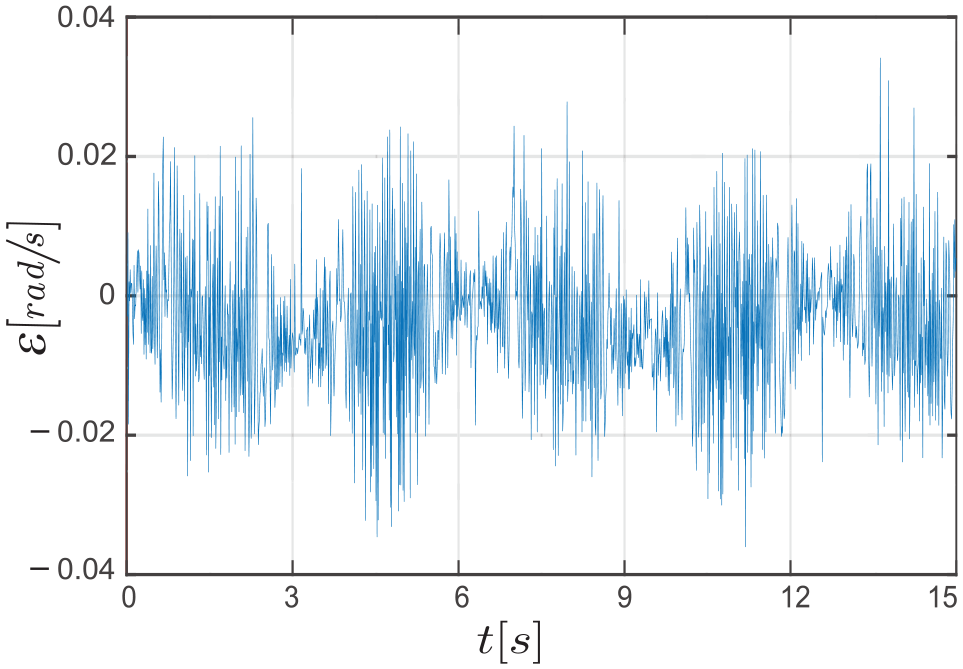
Error signal for velocity tracking of sinusoidal signal with frequency of 1 rad/s.
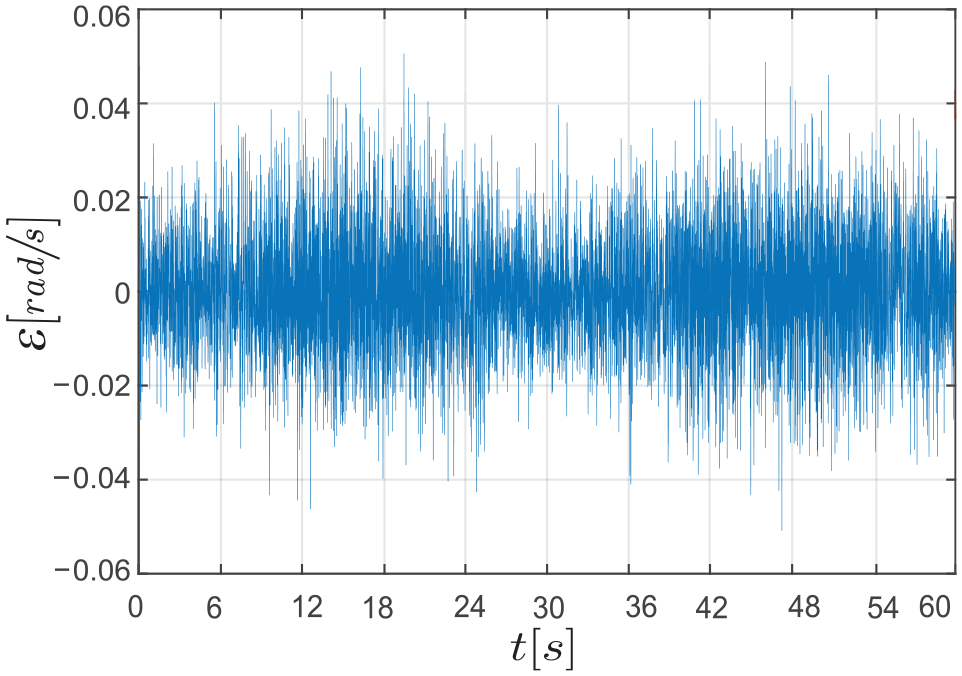
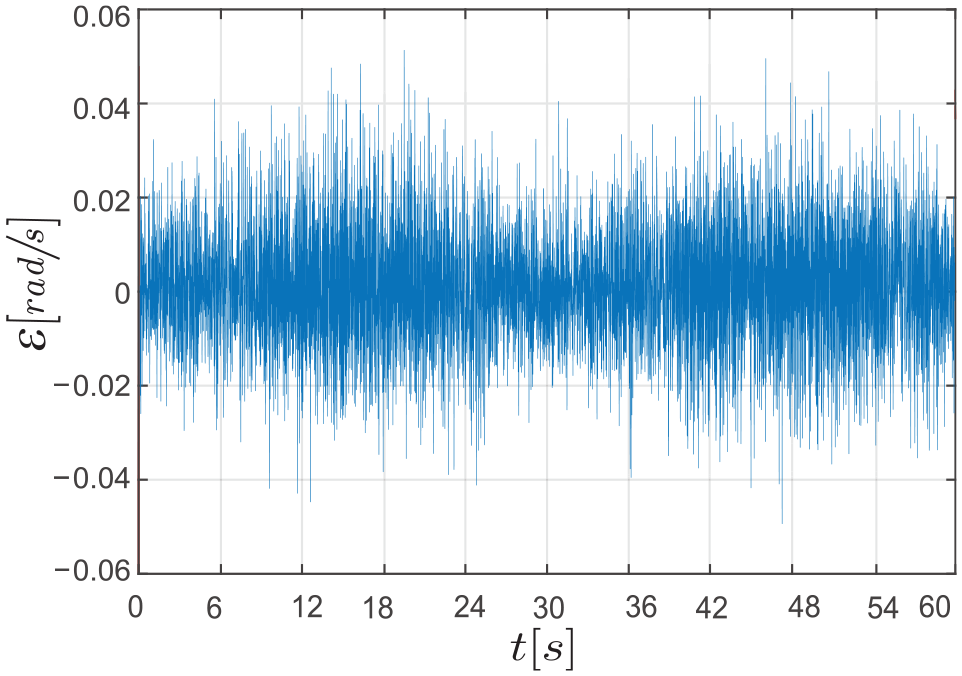
Another very useful signal for checking friction compensation in engine operation is the

Velocity tracking of chirp signal.

Error signal for velocity tracking of chirp signal.
Furthermore, in order to test the robustness of the designed optimized FBL controller the two types of disturbances

Feedback linearization control and GWO algorithm.
The first disturbance acts continuously as band-limited white noise signal added directly to the object. Therefore, the GWO optimized coefficient of the FBL controller, have remained unchanged, and comparisons of real and desired trajectories are and given in the Figures 18 to 24. In these set of figures it could be understandably observed that errors signals are more significant in case of the applied white noise disturbance, but also that the proposed control algorithm operates effectively, although the PI coefficients are optimized for the disturbance-free case.

Velocity tracking of step signal when white noise is applied as disturbance to the system.

Error signal for velocity tracking of step signal when white noise is applied as disturbance to the system.

Velocity tracking of sinusoidal signal with small frequency of 0.1 rad/s when white noise is applied as disturbance to the system.
Error signal for velocity tracking of sinusoidal signal with small frequency of 0.1 rad/s when white noise is applied as disturbance to the system.

Velocity tracking of chirp signal when white noise is applied as disturbance to the system.
Error signal for velocity tracking of chirp signal when white noise is applied as disturbance to the system.

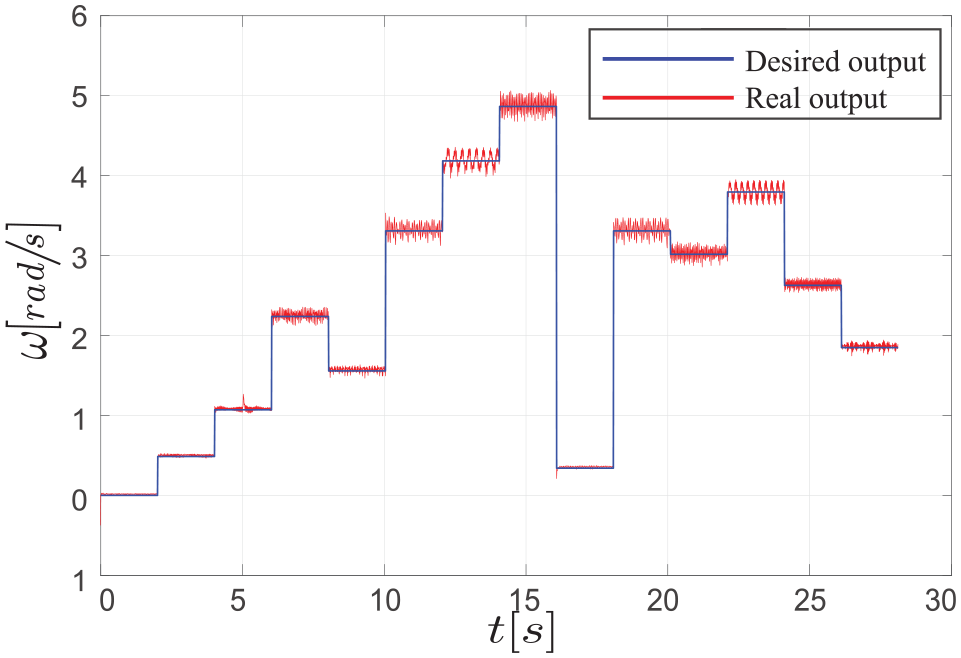
Velocity tracking of selected function when white noise is applied as disturbance to the system.
The errors of velocity tracking, where disturbances are added in order to test the robustness, are given in following figures respectively: Figures 19, 21 and 23. The step signal is very important in practice especially in industry when it is necessary to maintain a constant input speed of the motor.51,52
Here error is less than 0.06 rad/s for both sinusoidal and chirp outputs.
The second disorder acts continuously, with initial time in the
During the operation of the system, when the given desired output signal has amplitude larger than 1, disturbance which has much less intensity does not create a huge error, Figures 25 and 26.

Velocity tracking of step signal with step disturbance starting in the fifthth second.

Error signal for velocity tracking of step signal with step disturbance starting in the fifth second.
On the other hand, as other references are of much lower amplitudes (sine and chirp), a disturbance of the same amplitude creates a much larger error.
However, the control system manages to quickly deal with this disturbance and the system is not derived from stability but continues to drive: Figures 27 to 30.

Velocity tracking of sinusoidal signal with step disturbance starting in the fifth second.

Error signal for velocity tracking of sinusoidal signal with step disturbance starting in the fifth second.

Velocity tracking of chirp signal with step disturbance starting in the fifth second.

Error signal for velocity tracking of chirp signal with step disturbance starting in the fifth second.
There are many ways to check the robustness of the control system. One of them is comparison of current response under varying load condition. 53 In Medjghou et al. 54 authors investigate presence of uncertainties and disturbances in object in combination with the feedback linearization control and they have concluded that FBL is unable to ensure good performances 54 for the closed-loop system. There are many ways to overcome this problem, for example improve this control by adding a robust control term (discontinuous control). Their choice was motivated by its high robustness against uncertainties and disturbances.
Therefore, the whole control law was constituted of two terms, that is, feedback linearization control term and a discontinuous control term. This was not the case in this paper. The GWO algorithm was enough and successful even on the function of changing the desired reference very fast Figure 31.
Velocity tracking of selected function with disturbance starting in the fifth second.
Conclusion
In this paper, a feedback nonlinear control system is applied to high nonlinear machine. The variable that represented the given desired response of the system is velocity of the load shaft. First, the modeling of an object is shown. After it has been experimentally confirmed that linear equations do not describe this object well enough, they have been changed. Coulomb friction was introduced, which resulted in obtaining the nonlinear mathematical model. An approximation of the part of the Stribek friction curve was made with the tangent hyperbolic function. Then, a summary of feedback linearization theory and gray wolf optimization algorithm are given. The fulfillment of the conditions for the synthesis of the control law with this approach on a given plant has been examined and proven. Some more complex systems, which use this type of engine, could also be operated on this way. Finally, using Matlab and Simulink environment, the GWO optimization algorithm was used to optimize the PI coefficient of the proposed FBL controller. Specifically, optimal PI gains for the controller were generated according to IAE performance criterion.
From the attached experimental results, with special reference to the last Section, it is easy to see that nonlinear model gives justification for the usage of the feedback linearization control technique, especially since the robustness of the control system has been tested in the case of the two types of disturbances (both of them continuously acting on the object: white noise and step signal). White noise is introduced as the way to model the random excitation. 55 The results have shown that the proposed controller was capable of dealing with the nonlinearities of the DC motor. As the main goal of this study was to make the DC motor to track desired velocity, it is important to notice that this algorithm is convenient not only for an environments with disturbances, but also for numerous outputs. One possible area of the future work can be optimization with another metaheuristic algorithms and compare them with each other.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research of the first two authors was supported by the Science Fund of the Republic of Serbia, grant No. 6523109, AI- MISSION4.0, 2020–2022. Their work was as well financially supported by the Ministry of Education, Science and Technological Development of the Serbian Government, MPNTR RS under contract 451 to 03-9/2021-14/200105, from date 05.02.2021. Also, this research was performed within the TR 35011 and ON 174001, projects supported by Ministry of Science and Technological Development, Republic of Serbia, whose funding is gratefully acknowledged and COST Action: CA18203 – Optimising Design for Inspection.