
Abstract
Due to line impedance mismatches, nonlinear loads and other reasons, the traditional droop control algorithms have great limitations on the control of reactive power sharing. Distributed control algorithms based on hierarchical structure have become an effective approach for reactive power sharing compared with traditional centralized control methods. In this paper, an event-triggered control algorithm based on stability analysis of Lyapunov method is put forward in order to satisfy the demand of low-bandwidth communication for distributed generator in islanded microgrid. Subsequently, a distributed hierarchical control scheme adopting proposed event-triggered strategy is designed to achieve proportional reactive power sharing in an islanded microgrid. Finally, the feasibility and validity of the proposed algorithm are further verified in MATLAB/Simulink environment.
Introduction
The concept of microgrid refers to a small-scale low-voltage power system which usually contains renewable energy resources, storage systems, distributed generators (DGs) and various loads. In the case of islanded microgrid with inductive line impedance, the droop control methods including the active power to frequency regulation and reactive power to voltage amplitude regulation are usually employed to realize power sharing.1–3 The droop control has good robust characteristic and works autonomously. However, the control of DGs is facing some challenging issues such as the diversity of rated power, output impedance, hardware filters, feeder impedance and so on, which may worsen the power sharing and cause the faults of overcurrent and overload.4–6 Generally, the active power sharing and frequency control can be regulated well by some amended droop control algorithms, but the performance of reactive power sharing is still poor under unmatched feeder impedance condition. 6 Accordingly, how to ensure the proportional distribution of reactive power is a key factor to improve the stability of islanded microgrid. Basically, the centralized control and distributed coordinated control are the two main control ways in hierarchical control structure. But the most obvious shortcoming of the centralized control is the low reliability, for a single communication failure may cause the islanded microgrid to crash in small-scale DG group. In contrast to the centralized control structure, the distributed coordinated control approach based on hierarchical control structure is more suitable for islanded microgrid and has been widely applied.6–10 The block diagram of distributed hierarchical coordination control structure for n DG units in the islanded microgrid can be basically described in Figure 1.
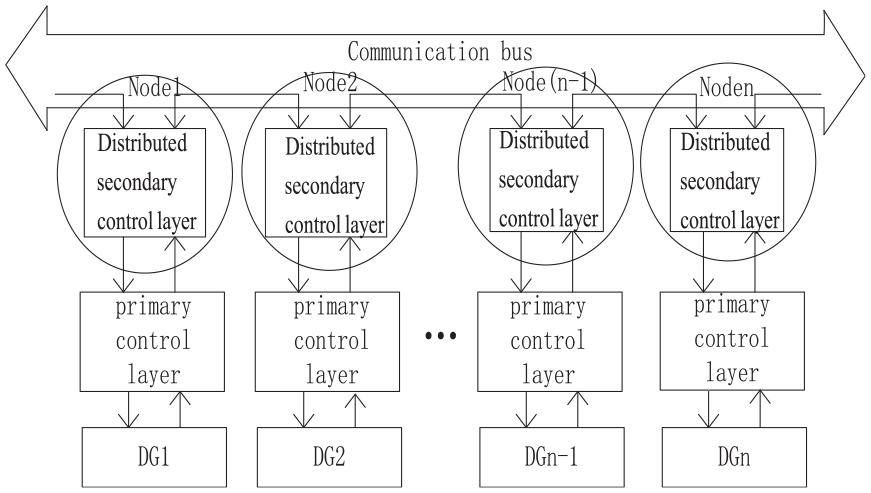
General distributed hierarchical coordination control structure.
In Figure 1, the main function of primary control layer keeps the output voltage amplitude and angular frequency of DG stable according to voltage and angular frequency reference based on droop control algorithm. In the secondary control layer, individual DG is usually regarded as an independent intelligent agent node. Each node only communicates with its neighboring nodes, in this way a sparse communication network with n nodes is formed. Distributed consensus algorithm is designed to rely on the sparse communication network to acquire global average reactive power and regulate reactive power sharing by modifying the voltage reference in primary control layer.
It has been generally acknowledged that periodic communication may cause excessive consumption of communication resources of DGs, particularly when the distributed control system approaches equilibrium point. 11 Therefore, the traditional consensus algorithms based on periodic trigger mode are difficult to implement in practice, especially when the communication channels and communication bandwidths of DG are limited. Distributed event-triggered consensus control algorithms can reduce the occupation of communication resources and decrease the communication bandwidth effectively.12–20 These event-triggered algorithms are all implemented in a predefined event-triggered situation related to system output or states. For example, if the estimation error of specified DG is beyond the set range, the event-triggered situations will be activated and the DG will trigger communication with its neighbors’ DGs.
In the last few years, the event-triggered consensus control algorithms have been wildly applied in islanded microgrid.12–17,21,22 For example, different event-triggering algorithms are proposed and used to control voltage stability or reactive power in Chen et al., 13 Lai et al. 14 and Zhang et al., 15 but these proposed schemes are not droop-based and are unable to work normally when communication failure occurs. In Lai et al. 14 and Zhang et al., 15 two distributed event-triggering schemes based on droop control are put forward to control frequency and active power sharing, respectively. In addition, a need-based aperiodic information communication scheme is presented to control load sharing in Meng et al., 16 but the formula derivation based on event-triggering control is inaccurate, and the threshold of trigger condition is not optimal. According to the Lyapunov stability theory, Gao et al. 17 analyzed the triggered condition in detail, but an important term in its triggered condition has been ignored.
Inspired by the previous results, this paper further studies and optimizes the triggered condition which only depends on local state information including neighbors’ nodes is established, and the corresponding analysis is provided. Secondary, the plug-and-play function is a basic request for DGs in parallel in island microgrid; with this function, the reliability of power supply can be greatly improved. Therefore, a distributed hierarchical control approach supporting plug-and-play to reduce communication bandwidth is designed for reactive power sharing in islanded microgrid.
The reminders of this paper are organized as follows. The consensus algorithm analysis and event-triggered condition are studied in section “Consensus algorithm analysis and event-triggered condition.” The distributed hierarchical control scheme based on the recommended algorithm is discussed in section “Distributed hierarchical control for reactive power sharing.” The two different simulation cases are studied and the simulation results are discussed in section “Simulation analyses.” The conclusions and the proof of theorem are given in section “Conclusion.”
Consensus algorithm analysis andevent-triggered condition
Preliminaries of algebraic graph theory
The general approach of graph theory usually regards the communication network formed by n intelligent agent nodes as an undirected graph. Let
For any undirected graph
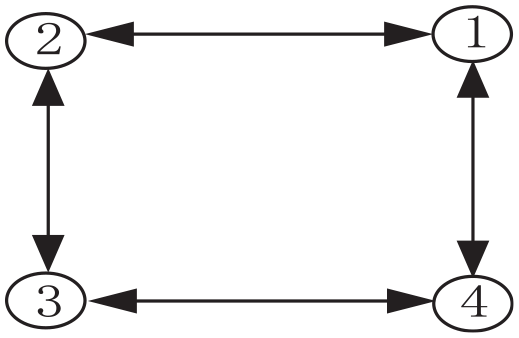
An example of bidirectional communication structure with four nodes.
Analysis of consensus algorithm with non-periodic trigger
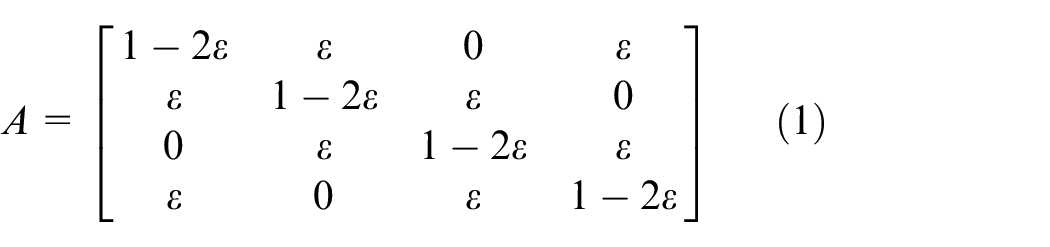
With the development of distributed consensus cooperation with event-triggering function, some related research works have been studied. The general first-order discrete protocol is usually defined as follows (see, for example, Meng et al. 16 and Gao et al. 17 )

where
A usual practice in solving the problem of average consensus of node

where
As mentioned earlier, the traditional consensus algorithm exchanges the communication information based on fixed time-triggered fashion, that is, each node sends its latest state to its neighbors in a fixed cycle. However, this periodic control fashion is difficult to apply in complex microgrid condition, because it requires high communication bandwidth, which may cause excessive consumption and waste of communication resources.
In order to reduce the occupation of communication resources and improve the applicability of consensus algorithm, one of the hotspots of current research works is concentrated on non-periodic distributed consensus algorithm by which the communication transmission can be triggered only when the specified trigger conditions are satisfied. In this way, any node
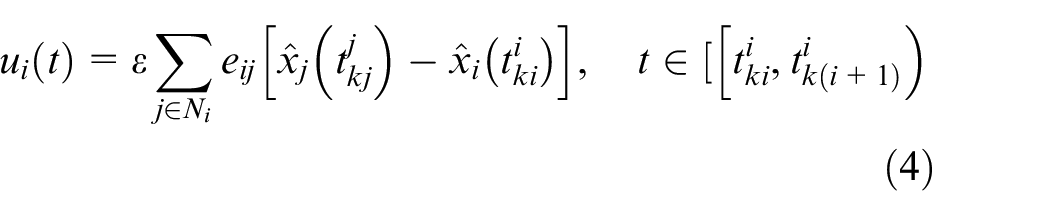
where
At the time interval
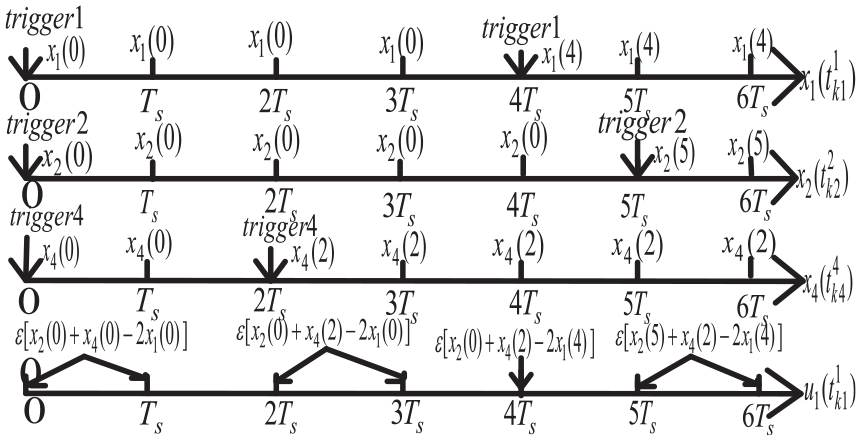
An example of the relationship between control protocol and node trigger.
The design of event-triggered condition
Event-triggered condition should be designed reasonably to achieve fast convergence of average consensus algorithms as well as reduction in usage of communication resources. Generally, the trigger condition is determined by detecting measurement error which is defined as the degree that the estimated state deviates from its actual state. A variable named estimation error for node

Once the estimation error exceeds a predetermined threshold value, the communication event will be triggered instantly and then the triggered node will update its local measurement state and broadcast its latest state information to neighboring nodes. This paper proposes the following event-triggering condition
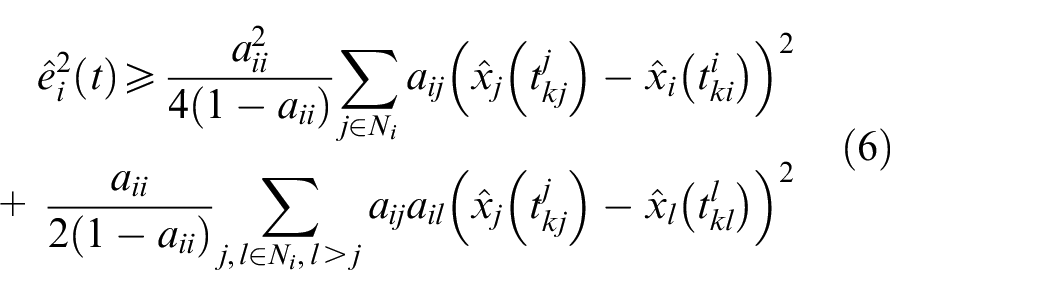
where
Theorem 1
Provided under the condition (6), the consensus of the communication network meeting the iteration equation (2) with the control protocol (4) can be achieved, then all nodes will converge to the average value of the initial values of all agent nodes, that is

The proof of Theorem 1 is presented in Appendix 1.
As long as the inequality of condition (6) is established, the event at node
What needs special explanation is that because
Distributed hierarchical control for reactive power sharing
In the primary layer, considering the power difference of different DGs, according to Han et al., 6 the droop control based on the vector control for DG i can be mathematically designed as
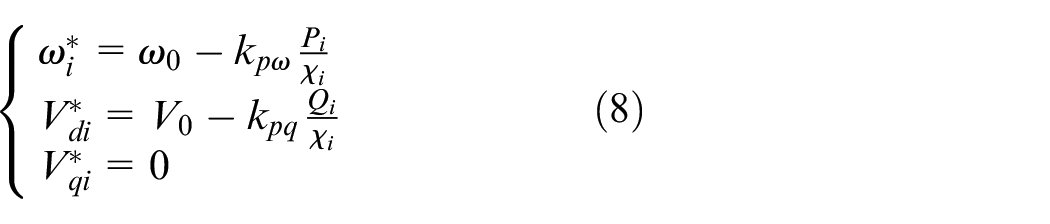
where
In the distributed secondary layer, each DG is considered as an agent node to exchange the information of respective reactive power with neighboring nodes, and process the data to acquire global average value for proportional reactive power sharing. Taking the possible nominal power differences of DGs into account, for any two nodes i and j, the proportional reactive power sharing will be achieved if the equation of

is satisfied.
12
Accordingly, the state variables of

According to equations (8) and (9), the reference of output voltage and the reference of angular frequency in primary control layer combining with the output of the secondary layer with event-triggered control can be written as
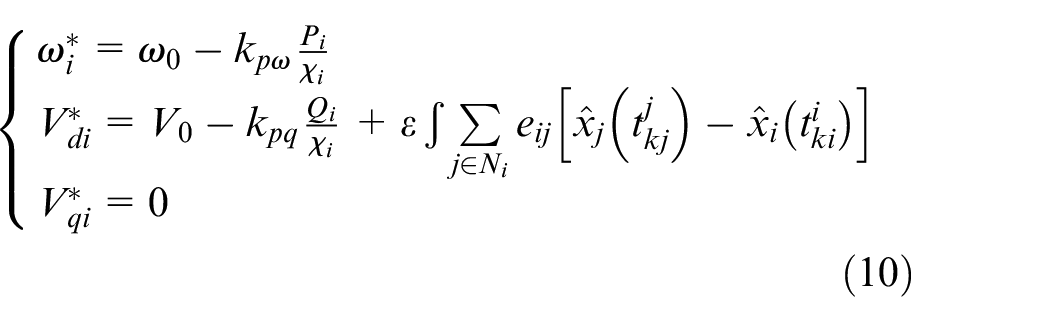
It should be pointed out that in the above formula, the updating of
The block diagram of distributed hierarchical control based on proposed event-triggered consensus algorithm for reactive power sharing is illustrated in Figure 4, in which
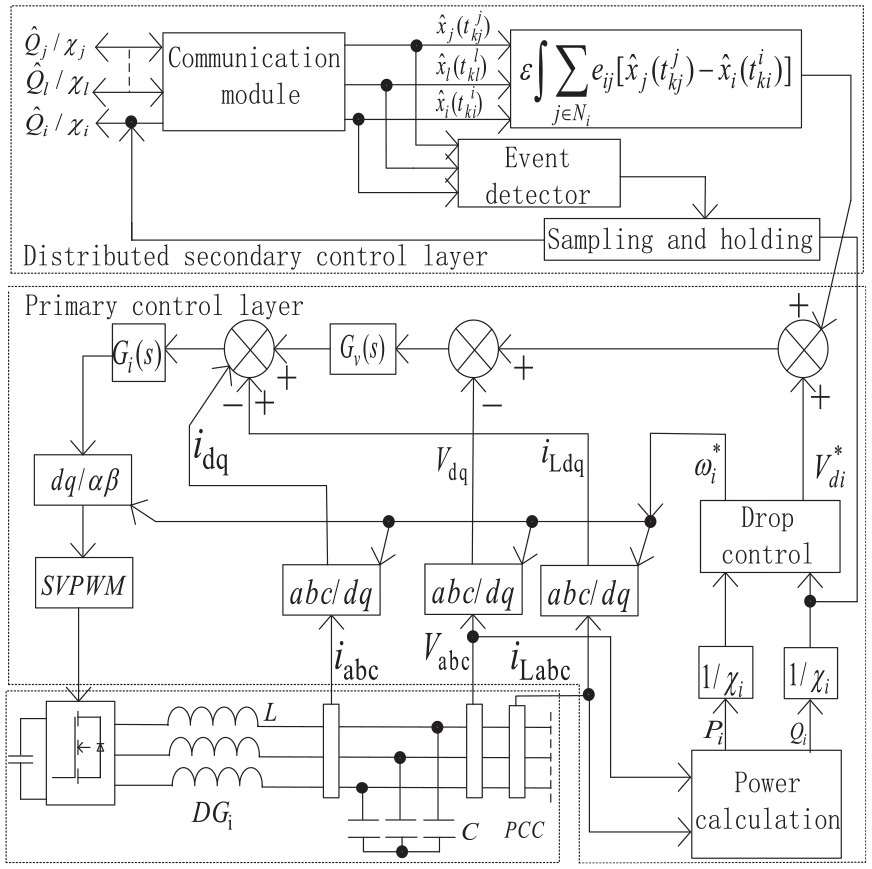
Distributed hierarchical control diagram based on proposed event-triggered algorithm for DG i .
Simulation analyses
To demonstrate the performance of the proposed control strategy, a simulation model with s-function module is built in the MATLAB/Simulink environment. The communication data can be exchanged according to Figure 2. Considering the influence of
Main simulation parameters.
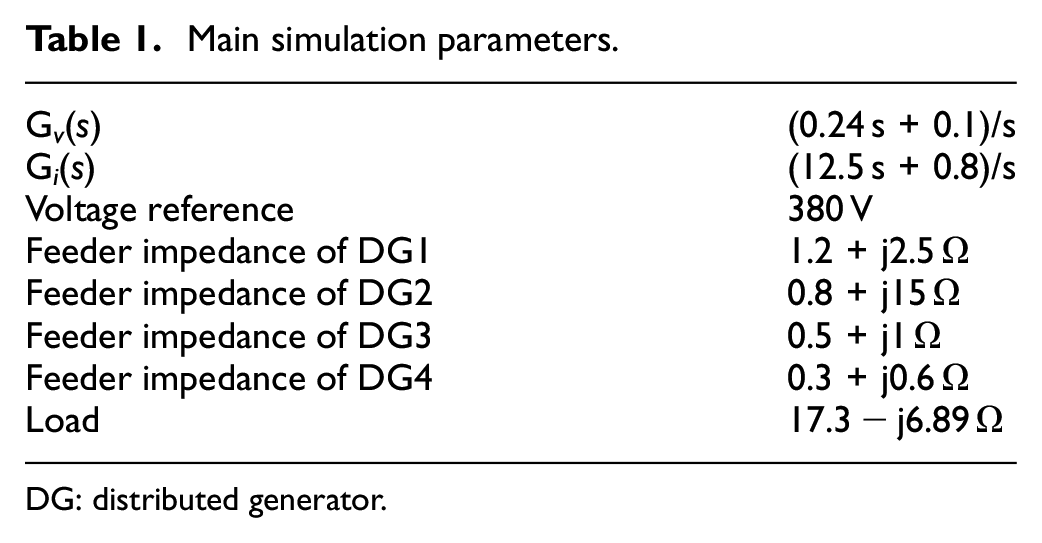
DG: distributed generator.
The following two simulation examples are shown to test and verify the performance of the recommended reactive power sharing control protocol.
Case 1: load variation confirmation
In this case, the ratio of rated power capacity for DG1, DG2, DG3 and DG4 is set to 2:2:1:1. The whole simulation process is divided into four states. Stage 1 (0–2 s), only the primary control level works, the secondary control layer does not work; stage 2 (2–2.2 s), the four DGs all operate with recommended secondary control layer; stage 3 (2.2–2.4 s), an additional nonlinear load suddenly is connected to the simulated island microgrid, meanwhile the proposed secondary control layer works normally; and stage 4 (2.4–2.6 s), the additional nonlinear load suddenly detaches from the simulated island microgrid, meanwhile the proposed secondary control layer still works normally.
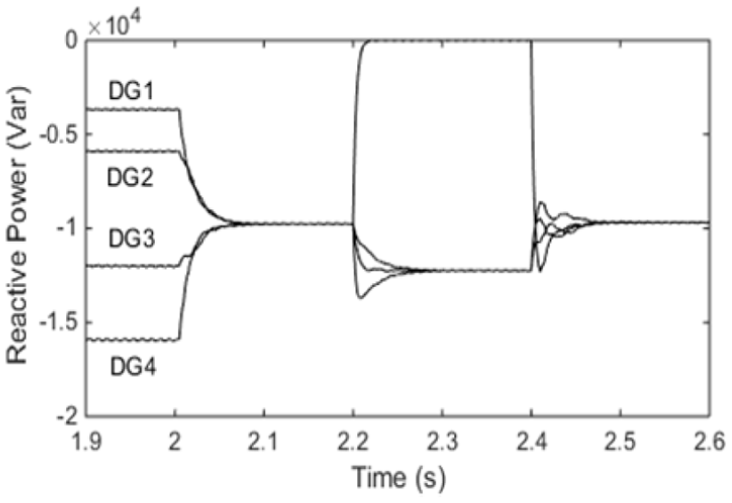
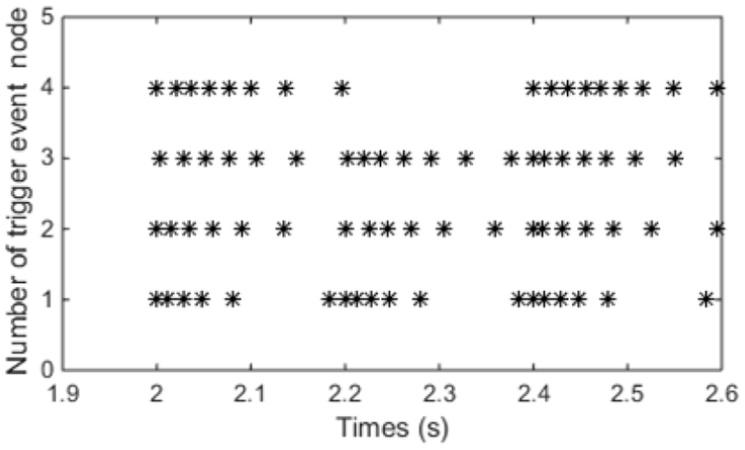
Figure 5 shows reactive power sharing performance with proposed control protocol under load variation condition. According to the simulation results, the proposed control protocol in secondary layer can carry out proportional reactive power distribution well and can also achieve good dynamic performance under the condition of load variation. For comparison, Figures 6 and 7 denote the event time instants of four nodes using proposed event-triggered way and periodic-triggered way, respectively. It should be noted that for the conventional periodic-triggered algorithms, a 5 ms interval is considered. Comparing the simulation results of Figures 6 and 7, the number of triggers proposed in this paper is much smaller than that of traditional periodic-triggered algorithms.
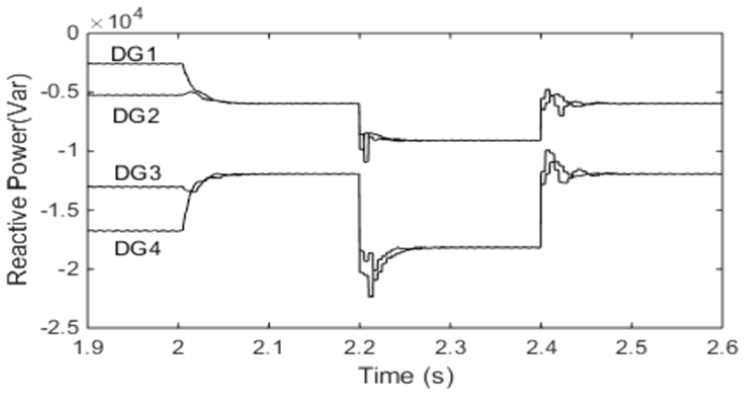
Reactive power sharing effect with proposed control protocol under load variation condition.
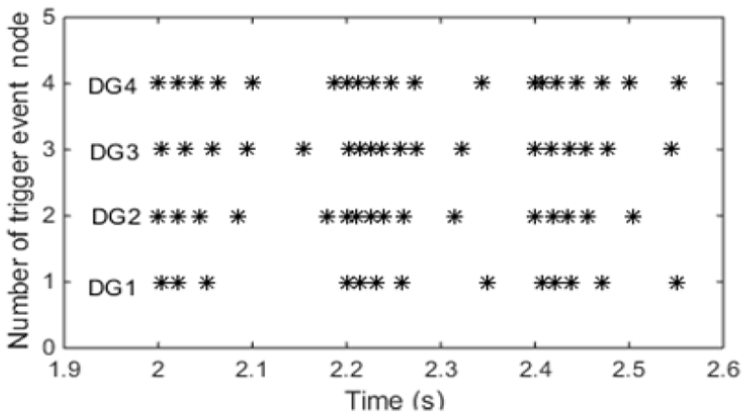
Event time instants of four nodes using proposed event-triggered approach.
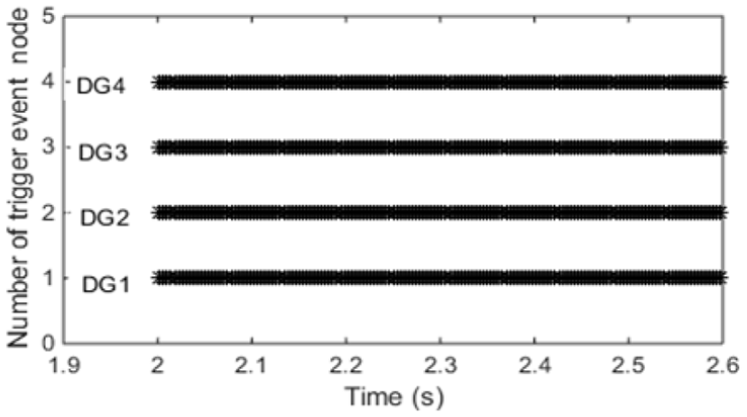
Event time instants of four nodes using traditional time-triggered approach.
Case 2: DG variation confirmation
In this case, the four DGs are set to have the same rated power capacity. The whole simulation process is also divided into four states. Stage 1 (0–2 s), the four DGs still only use droop algorithm to supply power to the load jointly, while the secondary control layer does not work; stage 2 (2–2.2 s), the four DGs all operate with recommended secondary control layer; stage 3 (2.2–2.4 s), DG4 is disconnected from the islanded system, meanwhile the remaining three DGs still adopt proposed secondary control layer; stage 4 (2.4–2.6 s), DG4 is connected to the islanded system again, and the four DGs all use proposed secondary control layer.
Figure 8 shows reactive power sharing performance with proposed control protocol under DG variation condition. Based on the simulation results, the proposed event-triggered approach in secondary layer can still implement the task of reactive power sharing well under the condition of DG increases or decreases. In addition, Figure 9 represents the event time instants of the four DGs in this case. When the proposed control protocol begins to work or when the number of work DGs changes, the number of communication events is also increased relative to steady state, but the trigger number is still small compared with Figure 7.
Reactive power sharing effect with proposed control protocol under DG variation condition.
Event time instants of four nodes using proposed event-triggered approach.
According to above simulation results, it is worthy to point out that the proposed control protocol can achieve the satisfactory reactive power sharing performance and reduce the communication times effectively.
Conclusion
In this paper, an event-triggered consensus algorithm based on the Lyapunov stability analysis approach is proposed to control the reactive power sharing. It has proved that the proposed control method can not only save the communication resources but also support the plug-and-play function within the established communication topology. Finally, the feasibility and validity of the proposed algorithm for reactive power sharing in islanded microgrid are further verified by the simulation of MATLAB.
Footnotes
Appendix 1
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.