
Abstract
This paper presents a trajectory tracking control scheme for underactuated surface vessels (USVs) with input delay. Firstly, the underactuated surface vessel system is transformed into a fully actuated system using differential flatness theory. To estimate the unknown nonlinear terms introduced in the transformation process, a fuzzy neural network (FNN) is employed. Secondly, to conserve control resources and communication bandwidth, the controller of the system under prescribed performance is designed using the backstepping method. This method updates the controller according to an event-triggered condition that is designed using a Lyapunov function. Finally, theoretical proof and simulation experiments are conducted to demonstrate the convergence and effectiveness of the proposed method.
Keywords
Introduction
Underactuated systems, which have fewer independent control variables than degrees of freedom, are a type of nonlinear system that have become increasingly popular in contemporary industry due to their cost reduction, increased system flexibility, and energy-saving benefits.1–4 Unmanned surface vessels (USVs) are a typical example of underactuated systems, as they only have steering mechanisms and longitudinal thrusters without any lateral propulsion.5–8 USVs are widely used in various fields such as sea surface reconnaissance, sea state monitoring, and marine rescue operations.9,10 However, the nonlinear, multi-variable, and underactuated properties of USV models make conventional controllers insufficient to meet the demands. Recent studies have proposed various trajectory tracking control strategies for USVs,11,12 but most of them neglect the potential impact of time delay caused by sensor or signal receiving delay. Therefore, in this paper, we propose a trajectory tracking control scheme for USVs that considers input delay.
One solution to the control problem of underactuated systems is to convert them into fully actuated systems which have been extensively researched by predecessors.13,14 The differential flatness method, which employs flat output and its derivatives to represent the state variables and input variables of the system, can decrease the dimension of the system by selecting appropriate flat output variables. Martin and Rouchon
15
demonstrated that any underactuated system with n inputs and
Although differential flatness can be beneficial for certain underactuated systems, it is necessary to conduct dynamic feedback or coordinate conversion on the expressions of these systems first, which may result in transformation mistakes and unmodeled dynamic complexity that cannot be represented. These unknown nonlinear disturbances are usually small but can impact the accuracy of tracking control. To estimate unidentified nonlinear components, fuzzy neural networks, which combine fuzzy theory with neural networks, are currently used due to the growth of computers in recent years.20,21 Zhang et al. 22 proposed a disturbance observer based on recursive perturbation fuzzy neural network to estimate unknown nonlinear terms, while Lu et al. 21 used fuzzy neural networks to estimate the parameters of nonlinear systems and achieved good results.
With the growth of contemporary control theory, numerous creative control approaches have been proposed. For instance, an adaptive iterative learning control strategy without models has been presented to address the tracking issue in nonlinear multi-agent systems. 23 Dynamic sliding mode has been utilized to tackle the fuzzy control problem of nonlinear systems. 24 However, these control methods require periodic updating of all control inputs, which not only consumes excessive control resources but may also result in controller failure in response to repeated control operations. To address these issues, event-triggered control (ETC) has been suggested as a solution, which can effectively reduce the computational load and achieve equal system performance with fewer control updates. 25 In Zhang et al., 26 a comprehensive analysis of event-triggered control based on sampling data has been conducted. The application of event-triggered control to the study of multi-agent systems has yielded successful results. 27 The benefits of event-triggered control, such as reducing communication and computational costs, are taken into account in this paper.
We provide a differential flatness and fuzzy neural network-based backstepping controller with a predetermined performance for the tracking issue of underactuated surface vessel with control delays. The following are primary innovations of this paper:
1) Our proposed controller is the first to combine the advantages of differential flatness and fuzzy neural networks, providing a more robust and accurate control strategy for underactuated surface vessels. The fuzzy neural network-based backstepping controller we propose achieves superior tracking performance compared to traditional backstepping controllers, particularly in complex and dynamic environments.
2) To our knowledge, this is the first study to successfully address the issue of control delays in underactuated surface vessel tracking using a backstepping controller with predetermined performance.
3) We introduce a novel approach to determine appropriate flat output variables for underactuated surface vessels, resulting in a more efficient and effective control strategy.
Problem formulation
Before the text begins, some explanations are given to the notation that appear in the paper. For simplicity, we will remove the arguments of some functions without obfuscation; for example,
Model description
The dynamic model of the underactuated surface vessel has been mentioned in numerous extant literatures, for example Fossen. 28 It has the following Lagrangian mechanics expression:
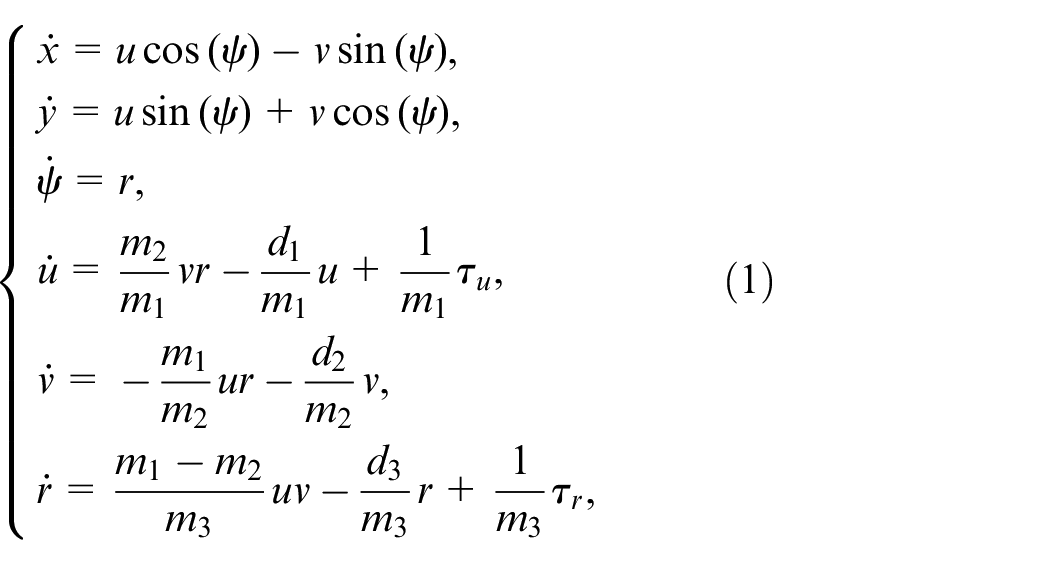
where x and y represent the abscissa and ordinate of the center of gravity of the USV, respectively. And u, v represent the surge and sway of the USV, respectively. Also,
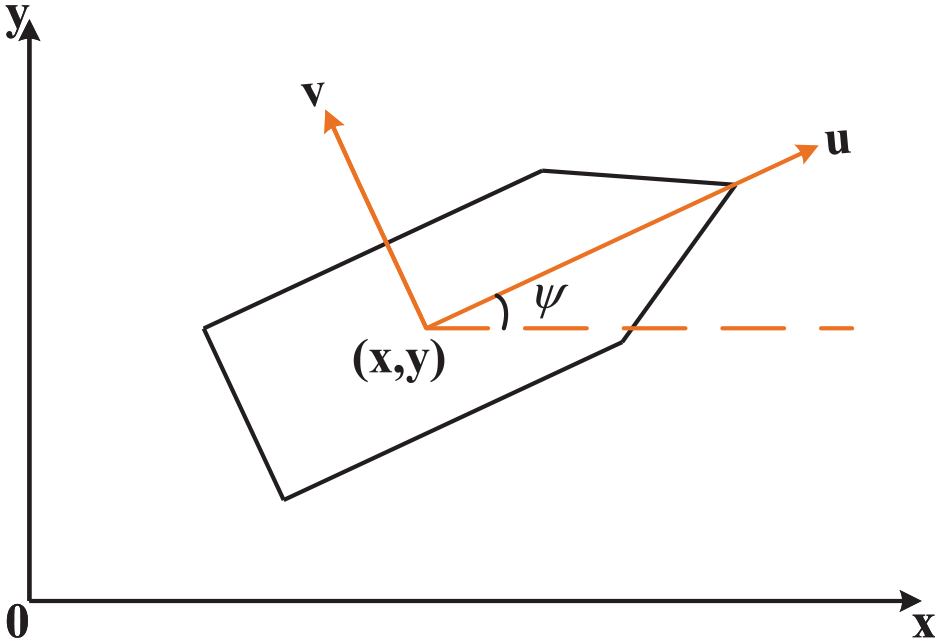
The USV model.
The hull inertia and additional mass of the USV are represented by
The preceding statement (1) is written as the following expression when a specific model,
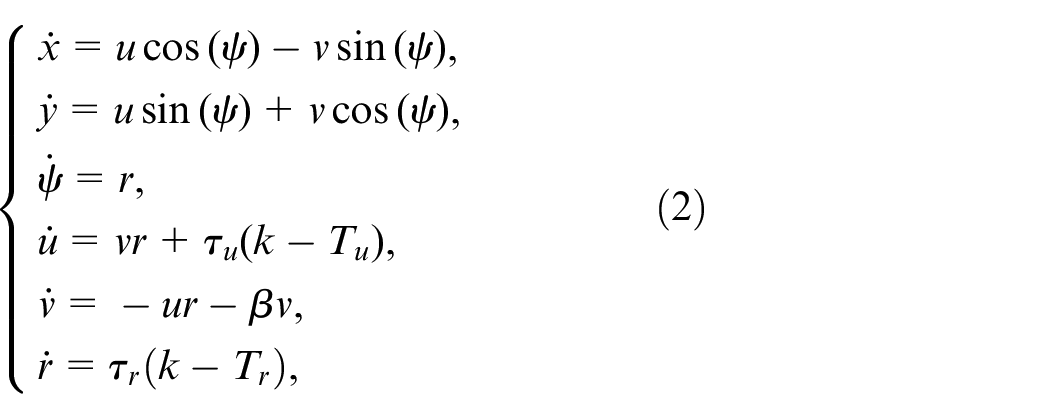
where
Differential flatness theory
Flatness is a property of nonlinear systems, a concept first proposed by Fliess et al. 29 A system is said to be flat if it can find a flat output such that all the states and inputs of the system can be represented by finite derivatives of this flat output. 30 The specific expression is as follows.
Consider the following nonlinear system:

where
If there is a flat output

such that all state variables and input variables can be represented as:
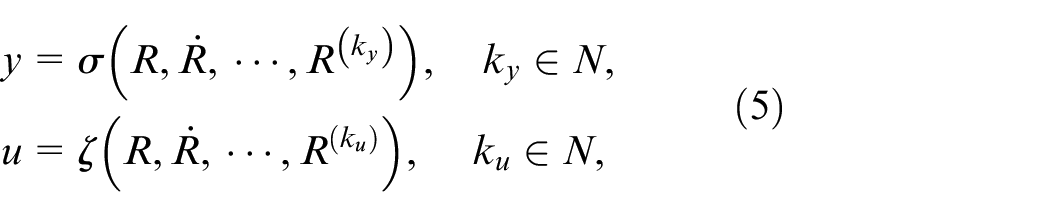
where
If conditions (4) and (5) are met, system (3) can be considered as a differentially flat system, and R is referred to as a set of flat outputs. If R is considered as the new output of the system and its dimension is equal to the dimension of the control input u, then system (3) can be considered as a fully driven system. However, the most important and challenging issue is finding a suitable flat output to simultaneously satisfy conditions (4) and (5), as there is currently no systematic solution.
Differential flatness system
In this paper, we select the x and y coordinates of the USV as the state of the system. Then, the state x and y are taken as the flat outputs. According to the differential flatness theory, all the states and inputs in the original system (2) can be represented by the finite derivatives of the flat outputs. The specific transformation process is as follows:
Calculate the second derivative of states x and y to get equation (6):
By equation (2) and equation (6), it can be deduced that
Substituting equation (2) into equation (7), Equation (7) can be simplified as
According to the different operations of equation (7), we can just get two expressions:

further

and

further

Because of

According to equations (11), (12), and (2), it can be calculated

as a result

Substituting equation (12) into equation (15), the expression of

Combining (2) and (6), it is determined that

Equation (17) can be simplified as

Substituting equation (12) into equation (18), the expression of

According to

Similarly, the expression of
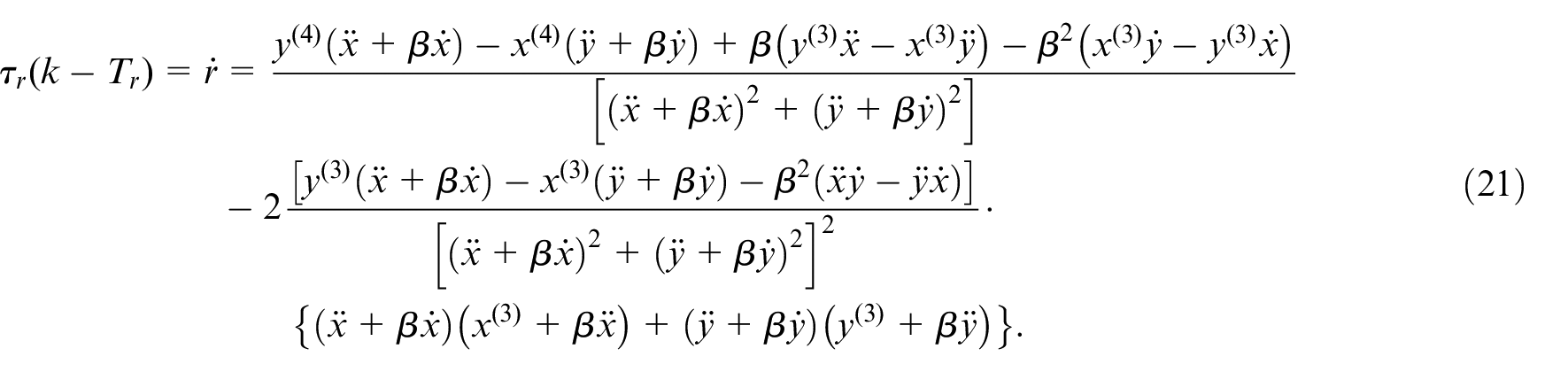
Finally, the fourth derivative of x and y can be expressed by the expressions already derived:
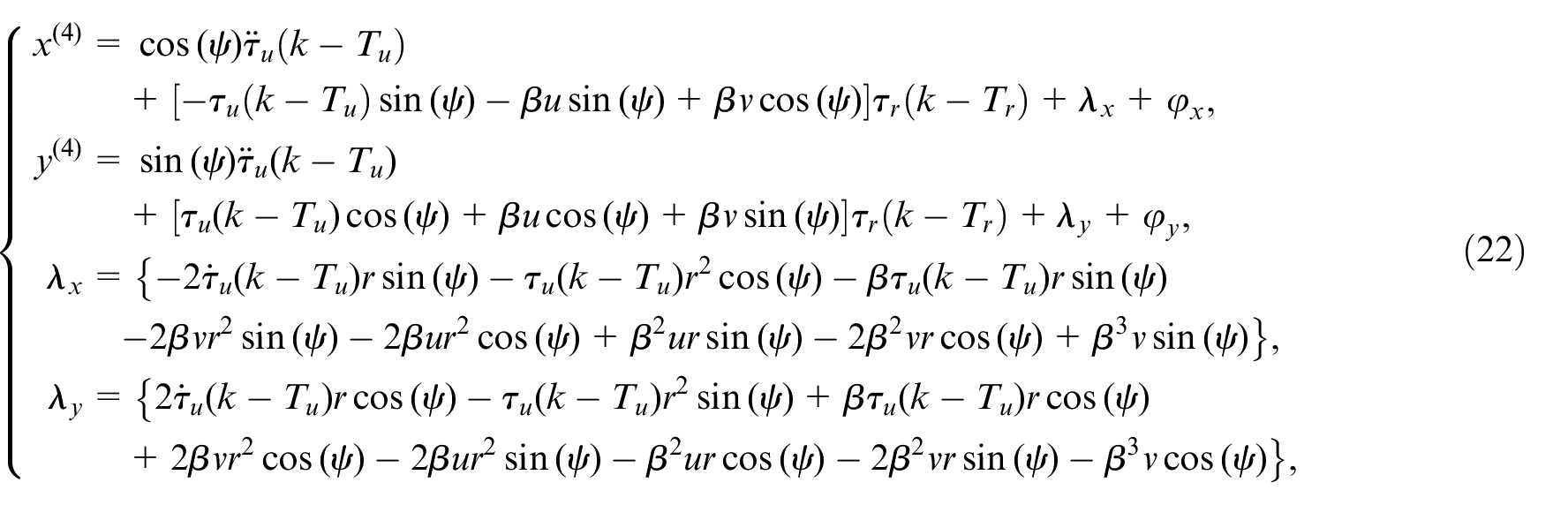
where
In this way, we have succeeded in expressing all states and inputs in the original system (2) in terms of the fourth derivative of the flat inputs x and y, and the new form is a strictly feedback form.

where

where
Assume that:

In this way, equation (23) can be written as two chain systems:

Since the forms of these two chain systems are exactly the same, in the following, only the part of
In order to construct the controller using the backstepping approach, we will employ a fuzzy neural network to estimate the unknown nonlinear term
FNN estimator design
Fuzzy neural networks can be used as universal approximators for nonlinear functions.
31
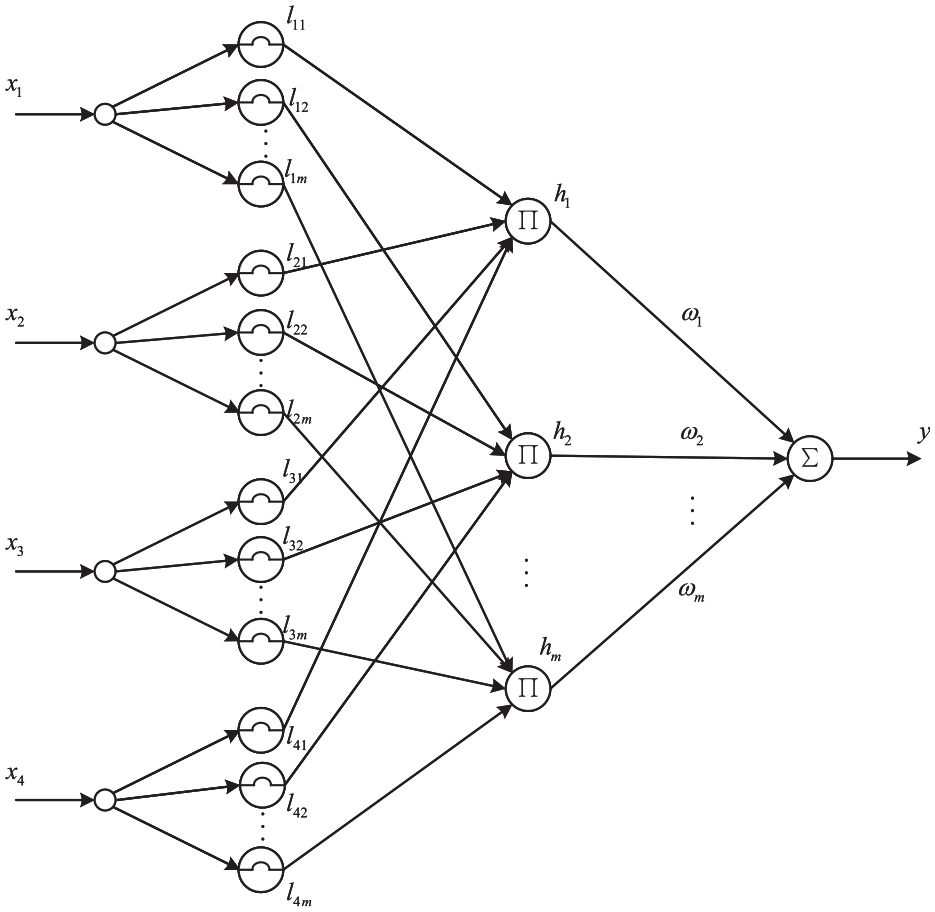
Fuzzy neural network structure.
Based on Figure 2, the kth fuzzy rule of FNN can be expressed as:
where
The membership function is selected as a Gaussian function:

where
The activation degree of the kth rule is defined as follows:

The output of the FNN can be described as:

where
Before proving the convergence of the FNN estimation method, an assumption is made to guarantee the feasibility of the method.
Let

where
The parameter adaptation law of FNN is selected as:
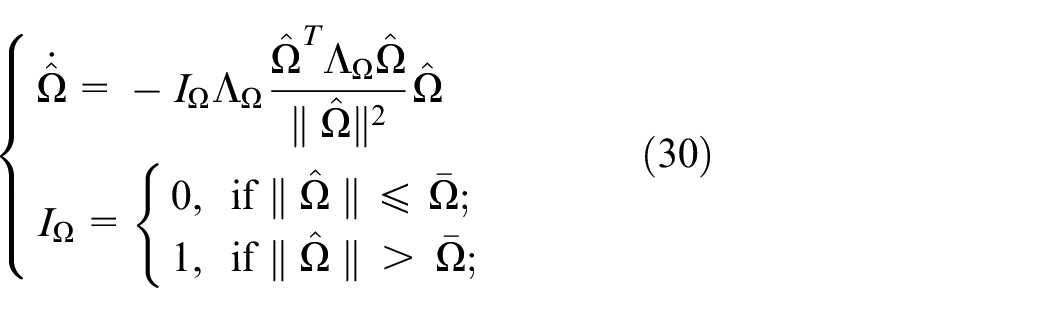
where

Taking the derivation of (33), we get

Substitute the designed parameter adaptation law (30)–(32) into (34) to get
According to equation (30)

If

If
so that

Anyhow

The remaining two are the same


According to (35)–(38) it can be concluded that

It can be concluded that the estimation errors
Design of controller
Prescribed performance controller
Consider the first chain system of equation (26):
where the nonlinear term
In order to control the tracking error of the system within a certain range, set the predetermined performance

where the tracking errors
1)
2) If
Before designing the controller, first give a lemma:
and they have the following conclusion:


Derivative for

Choose the Lyapunov function of the first step

where

Derivating

and

Substitute (42) and (43) into

Select virtual control

to make

where

Define the tracking error for the second step

Derivative for

The Lyapunov function of the second step is selected as

Taking the derivative of

Select virtual control

to make

where

Define the tracking error for the third step

Derivative for

The Lyapunov function of the second step is selected as

Taking the derivative of

Select virtual control

to make

where

Define the tracking error for the fourth step

Derivative for

Choose the Lyapunov function of the fourth step

Taking the derivative of V and combining (44) gives

Select virtual control

to make

where
According to Lemma 1, when
Combining the above formula, we know from Barbălat’s Lemma 32

thereby

further

In summary, for the chain system (39) using the controller (45), the system tracking error satisfies the predetermined performance, and the closed-loop system is globally bounded.
Similarly, the controller of the second chain system in (26) is designed as

according to the same procedures, and the same control effect may be obtained.
Event-triggered mechanism
The conventional control approach, where the control signal is updated at every time step, often involves excessive computations. While these methods are straightforward to implement, they may not be suitable for bandwidth-limited systems. To address this issue, an event-triggered mechanism is proposed to reduce the consumption of control resources. This mechanism allows control updates only when necessary, thereby reducing the computational burden and improving the efficiency of the system.
The event-triggered control scheme utilizes a time series denoted as
The event-triggered control law is designed as follows:
Define the event-triggered error as

If the event-triggered error exceeds the threshold set by equation (48), update the control input signal.
The following theorem is put out after the introduction of the event-triggered mechanism in order to guarantee the asymptotic convergence of the system tracking error.
2)

Taking the derivative of V and combining (44) gives
According to equation (47), the control law of
Substitute into Inequality (48)

Therefore, Theorem 2 also holds for
Simulation results
In order to better illustrate the effectiveness of the proposed method in this paper, simulation experiments are conducted as follows.
In this simulation experiment, the desired trajectory that USV needs to track is set as
The simulation is divided into five parts:
i) Trajectory tracking:
The control strategy in this paper is used to control the USV to follow the desired trajectory
Simulation results demonstrate that after some initial fluctuations, the actual trajectory of the USV can closely follow the desired trajectory, as shown in Figure 3.
ii) Tracking error of X-axis and Y-axis:
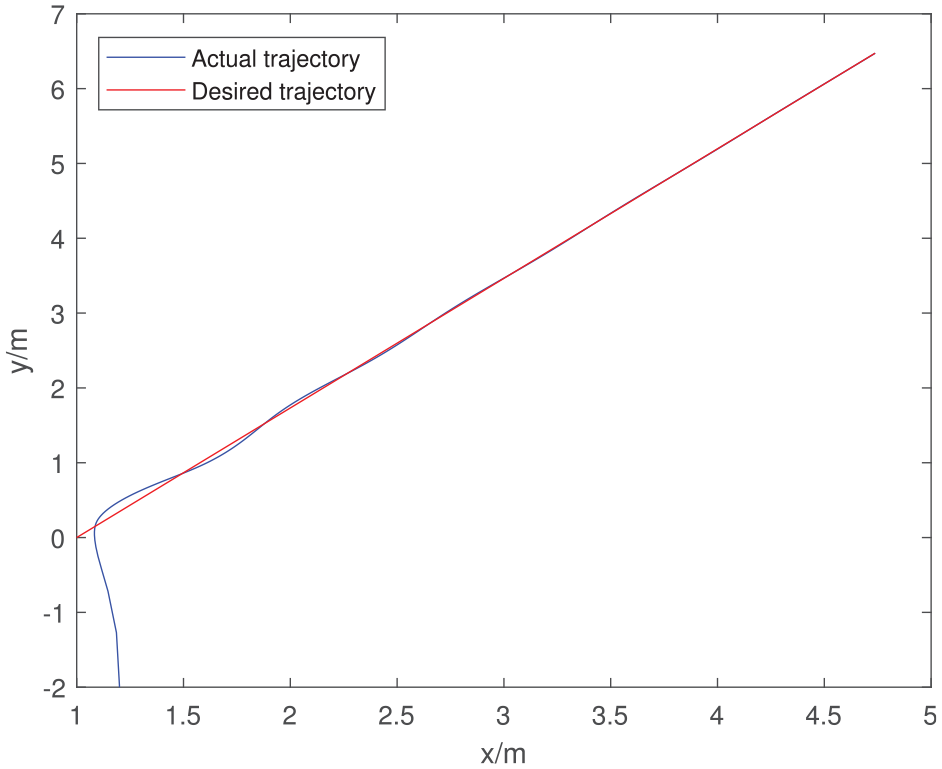
Trajectory tracking.
There are trajectory tracking errors on each axis since the trajectory tracking of the original system is decomposed into X and Y axis tracking in this work.
It can be seen from Figure 4(a) that the tracking error on the X-axis converges to 0 within the range of the predetermined performance function
iii) FNN estimation effect:
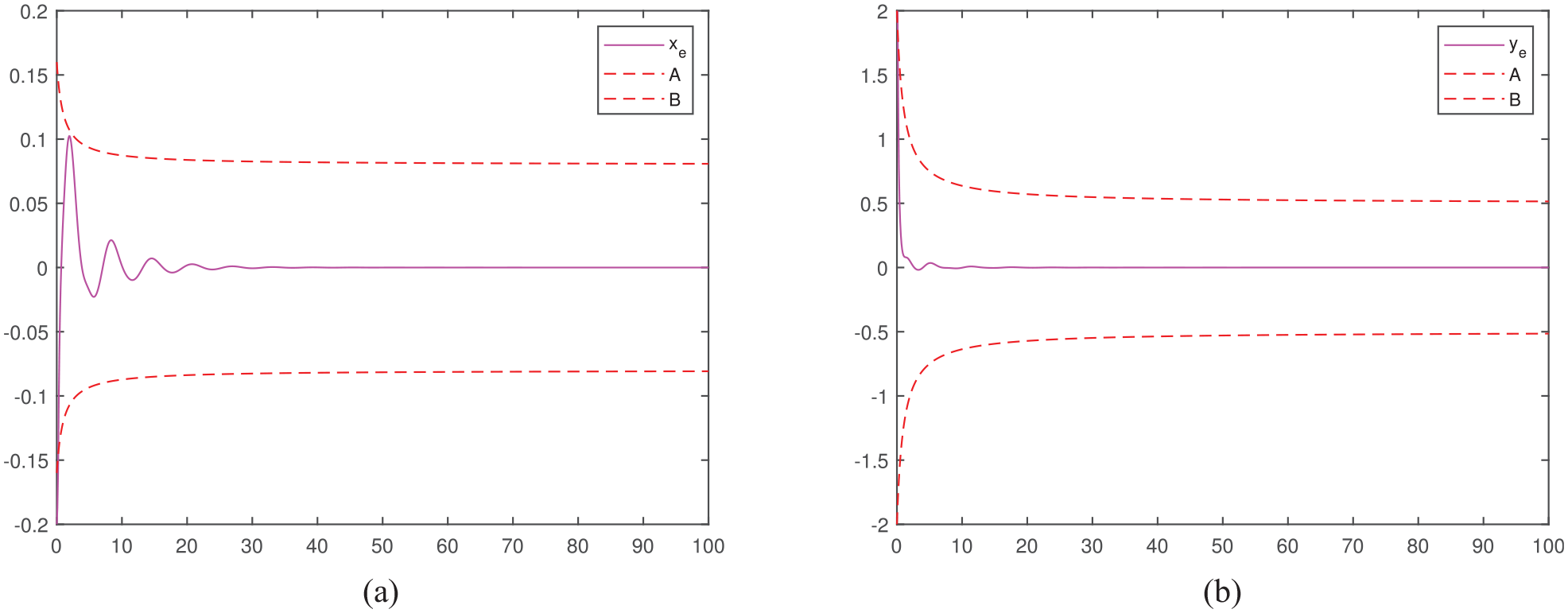
Tracking error under predetermined performance: (a) X-axis error and (b) Y-axis error.
The random bounded disturbance created between 0 and 1 is estimated using the FNN approach. These are the estimating effect and estimation error.
Figure 5(a) is a continuous curve fitting the random error with FNN. Figure 5(b) shows that the estimation error decreases rapidly with the increase of training times.
iv) Event-triggered points:
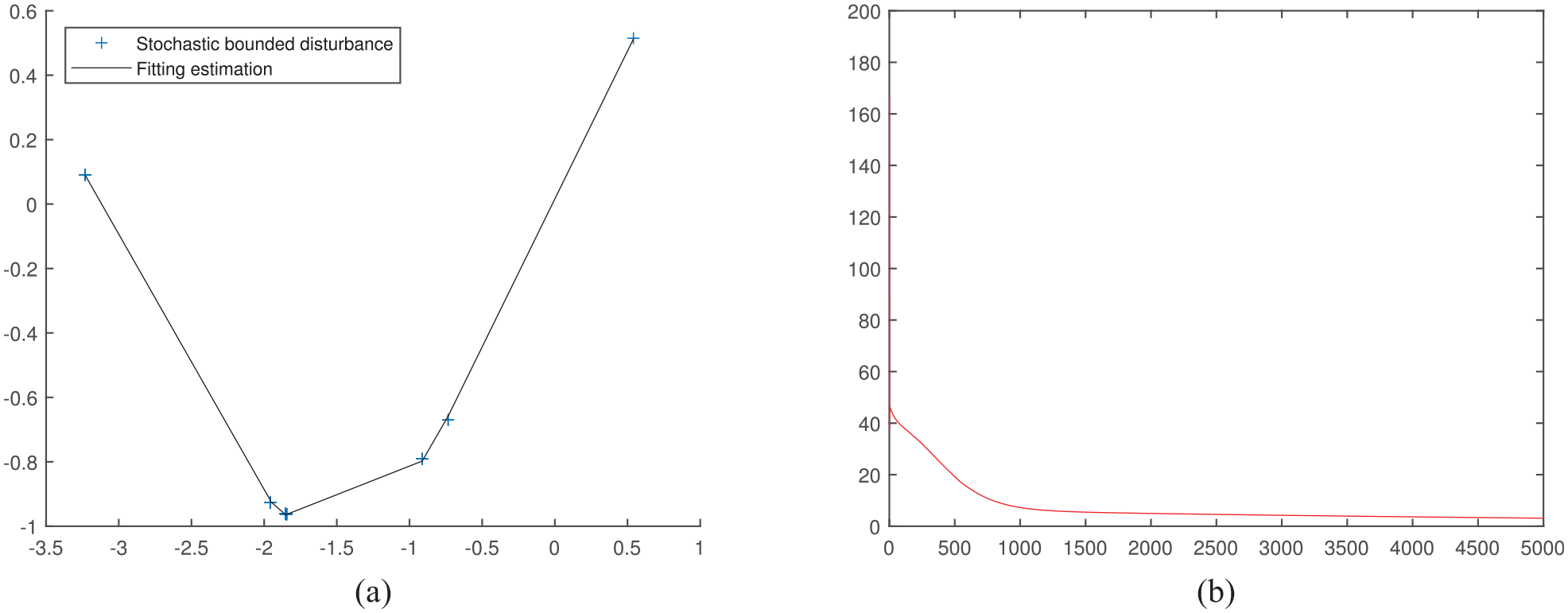
FNN estimation effect: (a) fitting curve and (b) estimation error.
This study presents an event-triggered approach that can reduce control resource use. The event-triggered point of the approach in the simulation experiment is displayed as follows.
The blue cross in the picture indicates that the system updated the control law at that time to achieve stability, while the red circle indicates that the system can remain stable within the specified range at that moment without updating the control law. The figure shows that the closed loop stability of the system can be achieved without continually calculating the control law all the time (Figure 6).
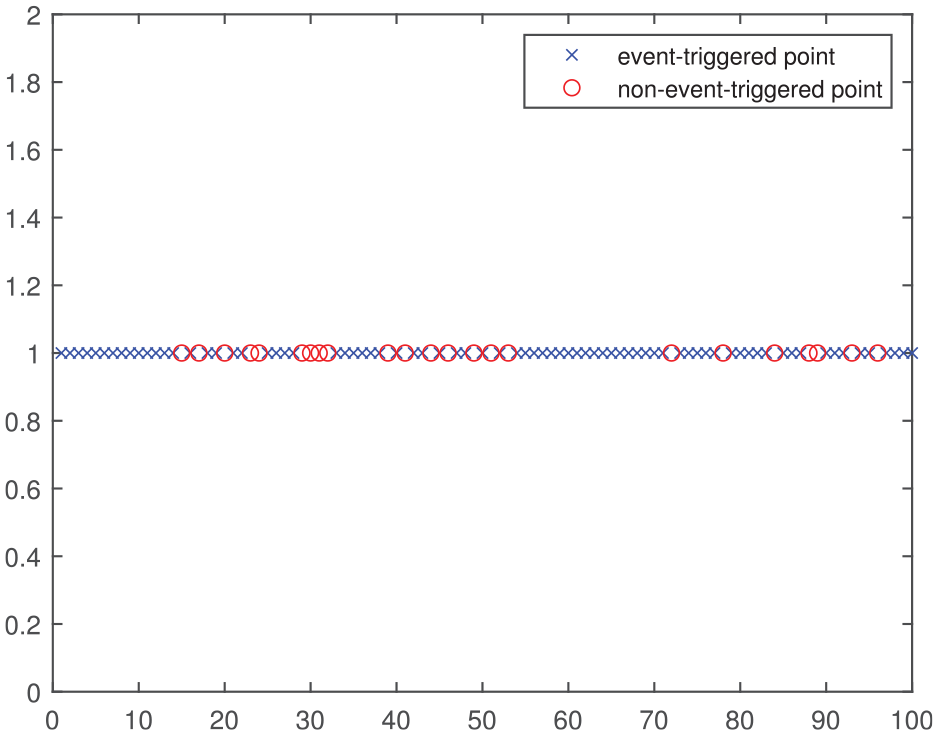
Event-triggered points.
Conclusion
The proposed control strategy for a specific type of underactuated surface vessels involves using the differential flatness theory to transform the underactuated system into two chained fully actuated systems. A controller is then designed using the backstepping approach with predetermined performance to ensure stability of the closed-loop chain system. An event-triggered mechanism is also introduced to reduce the computational load and improve control efficiency. The effectiveness of the proposed method is demonstrated through both theoretical analysis and simulation experiments. Specifically, the system is able to track a desired trajectory with high accuracy, as shown in the simulation results.
Footnotes
Author contributions
All authors contributed to the study conception and design. Material preparation, formula derivation and analysis were performed by [Chao Shen] and [Hua Chen]. The first draft of the manuscript was written by [Chao Shen]. [Jiahui Huang] and [Yun Chen] helped perform the analysis with constructive discussions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability
If anyone who wants to get the simulation data can contact the corresponding author by email (