
Abstract
This article proposes event-triggered proportional-derivative control for a class of nonlinear network control systems. For derivative action of the proposed proportional-derivative control, a novel event-triggering scheme is devised together with the control that considers a differential of a triggered state. The class of the nonlinear network systems is represented as a Lur’e system to consider various nonlinear cases. Time varying transmission delay is considered which can be defined by lower and upper delay bounds. The proposed proportional-derivative control is designed by Lyapunov–Krasovskii stability analysis, and the design condition is presented by linear matrix inequalities. The proposed event-triggered proportional-derivative control and event-triggering condition are verified with numerical simulation.
Keywords
Introduction
Traditional point-to-point wiring controls have been transferred to network control system (NCS) areas due to communication development. Studies have accumulated as NCS has developed though some challenges still remain.1,2 The most widely studied issue is network-induced delay related problems. Network-induced delay reduces control performance and stability of a NCS 3 and deteriorates its transient response.4,5 Proportional-derivative (PD) controls can be used to improve the transient response, and they can yield higher NCS control performance and stability. Many PD-based controls have been tried in NCS. However, most of them only considers local or remote areas dissociated from network transmission, 6 network-induced delay compensators, 7 or data transmission algorithms.8,9 Few studies have been done on the PD-based network control itself because of the difficulty in implementing the derivative action with network-transmitted data.
Recently PD-based sampled-data synchronization and
Event triggering can conserve communication and computational cost while maintaining control performance of sampling-time triggering.17,18 Event-triggered control executes control tasks only when a certain event occurs on a system, so data transmission is adapted to the system state. A NCS with network-induced delay can be efficiently controlled using an event-triggering scheme. However, NCSs suffer from not only network-induced delay but also other network-induced imperfections and system intrinsic properties.19–21 The network-induced imperfections such as packet dropout, signal quantization and the system intrinsic properties such as internal nonlinearity and input and/or output saturation of controllers or sensors are nonlinearity factors of NCSs. 22
To overcome the network-induced delay, that is, to stabilize a NCS with transmission delay and control input discretization, delay-dependent system stability analyses23–25 can be used. To overcome the effects from nonlinearities, it is essential to keep a NCS stable when nonlinear factors exist. However, linear approximations are only valid around some operating points, and it is impossible to check the NCS stability for all nonlinear cases. Considering a nonlinear NCS as a Lur’e system can be a good alternative solution that represents a nonlinear system as a linear dynamics which has unknown nonlinearity around it.22,26,27 The nonlinearity is assumed to have a sector-bound condition, and every system whose nonlinearity exists between two slopes passing through the origin can be expressed as a Lur’e form. Then, the Lur’e representation can be used to replace stability analyses for individual nonlinearity factors which satisfy the given sector condition. 28 Many nonlinear system stability analyses or control studies have borrowed the Lur’e expression.4,29,30 A Lur’e system can be a good choice for robust nonlinear NCS controllers design.
Although event-triggered controls are enthusiastically being studied, few studies have been done on event-triggering conditions. Periodic event-checking condition 31 and integral-based event-triggering condition 32 were devised to improve network efficiency by enlarging inter-event time. A Lyapunov-based small-gain-approach applied event-triggering condition which allows the condition tuning 33 and a nonfragile controller-design approach applied event-triggering condition 34 were proposed. However, none of them generate a differential of difference between current and triggered states which is essential for the derivative control.
To the best of the authors’ knowledge, there has been no PD control study that uses an event-triggering scheme. Event-triggered PD control has not been studied because it is difficult to achieve a feasible solution with triggered state derivative. This article solves this problem by proposing state and state-derivative-considered event-triggering condition, which can adjust triggering dependency between state and state derivative. In addition, the existing sampled-data PD controllers have prospects for improvement. The PD-based sampled-data synchronization by Liu and Lee
10
assumes the sampled state derivative to be zero, and the PD-based sampled-data
This article proposes an event-triggered PD control and an event-triggering condition which consider differential of triggered states. The sequels are organized as follows. The considered problem and used notations are clarified in section Notation and problem statement. The proposed triggering condition is fully described in section State-derivative-considered novel event-triggering scheme. The proposed event-triggered PD control design process is well organized in section Main result. Both the triggering condition and the event-triggered PD control are verified in section Numerical simulation, and the whole developed are summarized in section Conclusion.
Notation and problem statement
Notation
Standard notations used throughout this article are as follows:
Problem statement
A class of nonlinear NCSs with time-varying transmission delay

where
The nonlinearity in equation (1),


Here,

and

The elements of the

and the elements of the

and

where

and

where

Here, the parameters belong to the following combined set of the convex hulls

where

We have interest in designing a state-feedback PD controller as

where

where

The following assumptions are brought to this article for theoretical development:
Assumption 1
All states of a network-connected control system are measurable.19,35
Assumption 2
A sensor is time-triggered with a constant sampling period h, while a controller and a zero-order holder (ZOH) are event-triggered. 18
Assumption 3
A signal passes through network paths in a single packet, and computational delay of a NCS is negligible. 20
Assumption 4
The holding interval of the ZOH at the controller is
The following are important lemmas that will be used in section Main Result.
Lemma 1 (Bessel–Legendre integral inequality)
For a given matrix

where

Lemma 2
The following inequality holds for any positive definite symmetric matrix

The proposed event-triggered PD control is designed for a NCS with a time-varying transmission delay
Lemma 3
For proper matrices


State-derivative-considered novel event-triggering scheme
This article proposes a novel event-triggering condition for the proposed event-triggered PD controller that uses the derivative of the triggered signal. Figure 1 shows a NCS with the proposed event-triggering condition–triggered PD controller. System states are first measured by a sensor and discretized with a constant sampling cycle h by a sampler. Here, the sampling instants are denoted as


Structure of a NCS with the proposed event-triggering condition–triggered PD controller.
An event generator is placed next to the sampler and determines whether to hold or release the sampled signal to network, and resulting signals are fed into the PD controller after passing through the network. The sequence set of the release, that is, event-triggered sample set, is defined as

Considering the derivative action of the PD controller, this article proposes the following event-triggering condition

where

where

Then from equation (20), triggered update time,

Remark 1
The event-triggering condition (23) is related to the system state and its derivative in a discrete instance. A sampled state
Main result
In this section, an event-triggered PD controller is designed for a nonlinear NCS that triggers with the proposed event-triggering scheme.
For the design, the event-triggered closed-loop system (13) should be denoted with a delayed-system representation. Define the following piecewise affine function

Then, we have

The proposed event-triggered PD control design condition is summarized as LMIs in the following theorem. An augmented LK functional is constructed by considering time-varying transmission delay and the delay bounds. The Bessel–Legendre integral inequality (Lemma 1) is used to decompose a double integral of the state-derivative term, and Lemma 3 is used to achieve a convex solution for the lower and upper bounds of the time-varying transmission delay.
Remark 2
In the NCS (Figure 1), system measurements are sampled and selectively transmitted through the network. The digitized samples should be reconstructed as a signal, and the ZOH holds the triggered samples and makes a stepwise control input signal.
2
Control input changes as the triggered sample at
The LK functional terms
For simplicity in the subsequent formulation, the following notations are defined:








Theorem 1
Let the network-induced delay


where
Moreover, the proportional and derivative gains of the event-triggered PD controller (12) are given by
Proof
Consider the following LK functional candidate

where
Apply Lemma 2 on the
The

Applying Lemma 1 to equation (30) leads to

and
Add system dynamics (equation (33)), nonlinearity bound (equation (34)), and event-triggering condition (equation (35)) to the upper bound of



Then, upper bound of the

The upper bound of the
This completes the proof.
Remark 3
With the pre-selected
Numerical simulation
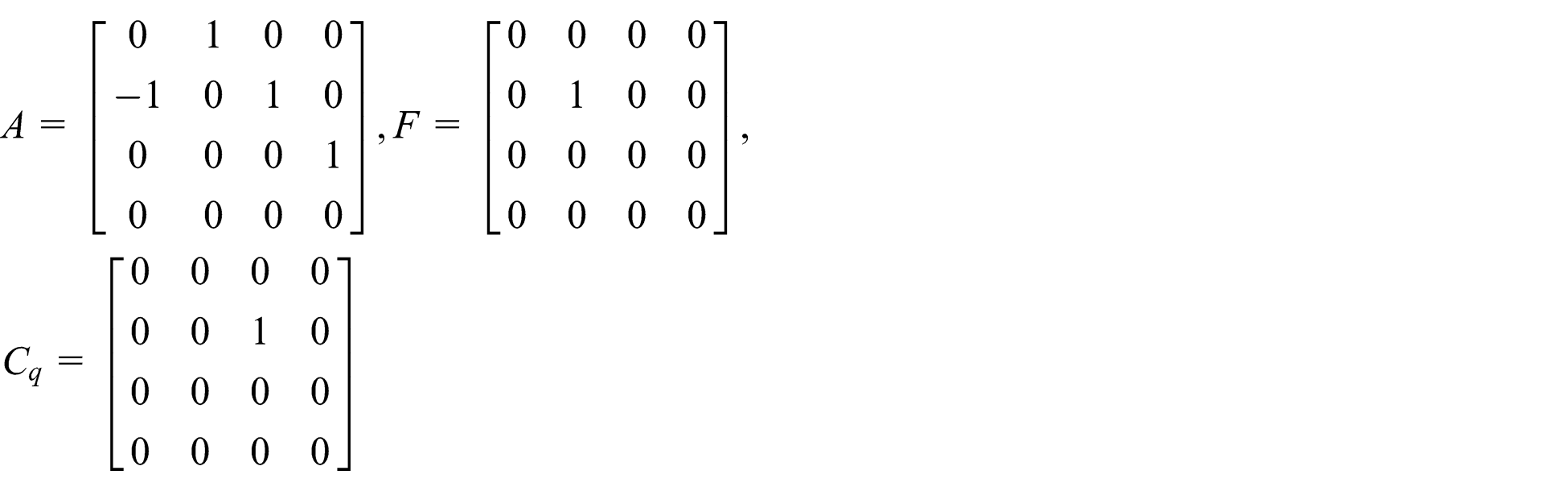
A numerical simulation was conducted, and the proposed event-triggering scheme and the event-triggered controller design were verified. A rotational and translational actuator (RTAC) benchmark problem was considered.38,39 The RTAC system can be represented in the predefined Lur’e form (equation (1)) with the following matrices
Applying Theorem 1 with

and

respectively. The sine function,

and design parameter of the event-triggering

Release instants and interval (Figure 2) and state response (Figure 3) results are shown. The simulation was conducted with sampling time

Release instants and release interval of the proposed event-triggering scheme.

State response of the RTAC using the proposed triggering-scheme-applied event-triggered PD control under
Conclusion
This article proposes an event-triggered PD control (equation (12)) and a state-derivative-considered event-triggering condition (equation (23)) for a class of nonlinear NCSs (equation (1)) which is represented as a Lur’e system. The proposed event-triggered PD control (equation (23)) considers triggered state derivatives, so it has extended form compared to previous triggering scheme.17,40 The nonlinearity of the Lur’e system is assumed to be sector bounded (equations (8) and (9)). The proposed PD controller can be designed for all nonlinear NCSs, which satisfies those sector-bound conditions. The proposed event-triggered PD control (equation (12)) and event-triggering scheme (equation (23)) are verified by the numerical simulation.
Footnotes
Academic Editor: Yanzheng Zhu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.