
Abstract
In lithium-ion batteries, the accuracy of estimation of the state of charge is a core parameter which will determine the power control accuracy and management reliability of the energy storage systems. When using unscented Kalman filtering to estimate the charge of lithium-ion batteries, if the pulse current change rate is too high, the tracking effects of algorithms will not be optimal, with high estimation errors. In this study, the unscented Kalman filtering algorithm is improved to solve the above problems and boost the Kalman gain with dynamic function modules, so as to improve system stability. The closed-circuit voltage of the system is predicted with two non-linear transformations, so as to improve the accuracy of the system. Meanwhile, an adaptive algorithm is developed to predict and correct the system noises and observation noises, thus enhancing the robustness of the system. Experiments show that the maximum estimation error of the second-order Circuit Model is controlled to less than 0.20V. Under various simulation conditions and interference factors, the estimation error of the unscented Kalman filtering is as high as 2%, but that of the improved Kalman filtering algorithm are kept well under 1.00%, with the errors reduced by 0.80%, therefore laying a sound foundation for the follow-up research on the battery management system.
Keywords
Introduction
With the widespread using of lithium-ion battery (LiB) in industry, daily life and the rise of dynamic wireless power transmission technology, 1 the estimation of state of charge (SOC) has become an important part of battery management. However, due to the complex structure of the battery, the SOC estimation is difficult because the SOC state of the battery is affected by the discharge current, internal temperature of the battery, self-discharge, aging and other factors. SOC of LiB is also the key of unmanned aerial vehicle (UAV) battery management system (BMS). Accurate estimation of the nuclear power status of LiBs can not only make the utilization of batteries more efficient but also facilitate the rational and effective management of LiBs, so as to improve the performance and safety of UAV. Due to the influence of various internal and external factors in the use of UAV power LiB, it is unable to accurately estimate SOC. Nowadays, with the continuous development of new energy and deep studies of LiB, a few new kinds of accurate estimation methods are successively put forward for SOC ampere-hour integral measurements with simple operations. The early SOC estimation methods have very strong dependence. If the initial SOC is inaccurate, the estimated error will be accumulated gradually, finally deviating from the real and estimated values. 2 The open-circuit voltage (OCV) method uses battery OCV and nonlinear relation between the SOC and the lithium battery SOC estimate, but the battery Small OCV measurement deviation errors may also occur in SOC. And measuring the OCV needs the battery to stand for a long time, so the OCV method cannot accurately estimate the SOC of the batteries in working states. The OCV method is not accurate to estimate the SOC of the battery’s working state. 3
The extended Kalman filter (EKF) algorithm is one of the most commonly used 4 SOC estimation algorithms, and the EKF algorithm is used to evaluate the power and energy of the hybrid system of LiB and ultra-capacitors, which solves the estimation error caused by system interference and sensor noise, 5 but EKF needs to calculate the Jacobi matrix of each cycle, which leads to a large amount of calculation. Adaptive EKF is used to estimate the working state of LiBs, which solves the limitation of EKF in SOC estimation of LiBs. 6 The fractional-order model is applied to the short circuit fault diagnosis of electric vehicle (EV) batteries, 7 and the fractional-order model is used to estimate the state of the hybrid power system of LiBs and ultra-capacitors, which fills the gap in the research on the remaining power estimation of hybrid power systems. 8 In addition, an enhanced equivalent circuit model (ECM) considering charge redistribution, health state and temperature effect is proposed. 9 The ECM of pure EV LiBs is analyzed. 10 A dynamic linear model–based charging state estimation method for LiBs is studied, 11 which is also EKF state analysis of LiBs in EV charge estimation. 12 A joint estimation method of SOC and state of energy (SOE) based on the particle filtering is proposed, which greatly reduces the problem of cumulative error due to current or voltage measurement noise. 13 A method for estimating the SOC of a LiB considering capacity attenuation is proposed. 14 The OCV and charging state function of no-load LiBs are optimized. 15 The parameter identification method of the ECM of aviation LiBs is studied 16 and the health status is evaluated and analyzed. 17
Aiming at the problem that large initial SOC error leads to the accumulation of subsequent SOC estimation error, a fractional-order model–based estimation method for SOC of LiBs is proposed. 18 In addition, a new method for predicting the life of LiBs based on the voltage change rate and iterative calculation is proposed. 19 The online dynamic equilibrium adjustment of high-power LiB packs based on the equilibrium state estimation is designed. 20 The method of data model fusion is applied to the estimation of online charging state and health state of LiB. 21 The particle filter (PF) method was used to estimate LiFePO4 batteries, which solved the interference problem caused by temperature changes and drift current noise in SOC estimation. 22 The charge state and deformation rate of the electrochemical cell are studied. 23 The dual-scale adaptive PF algorithm is also applied to online parameter state estimation of LiBs, which solves the problem of large workload and inaccurate state estimation in offline state. 24 With the continuous deepening of research, the battery’s hysteresis effect is considered in the ECM, and the unscented PF is used to predict the discharge state and the remaining discharge time, which improves the accuracy and convergence speed of SOC estimation under dynamic driving cycles. 25 The support vector machine (SVM) is also applied in the accurate estimation of SOC of LiBs, 26 and a vehicle battery predictive charge control model based on the vehicle state prediction is established, 27 and their estimation accuracy is similar to EKF. In addition to this, to solve the problem of accurate estimation of aviation LiB pack, a safety prediction and estimation method based on the real-time detection and filtering is proposed. 28 To avoid a lot of work of offline estimation, the battery model and online estimation of LiB charging state are studied. 29 Using the principle of artificial intelligence to solve, the neural network gives the optimal decision, optimizes its energy consumption method in the corresponding building area and improves the utilization efficiency of LiBs. 30 A power state estimation model based on the classification regression tree is studied and used in hybrid cars. 31 A new power management method is proposed and applied to V2V, V2B/I, V2N and other connected vehicles, which greatly reduces energy consumption. 32 The charging state model of LiBs is established to facilitate the high efficiency of industrial application. 33 A model-based untraceable Kalman filter observer is designed and used in charge state estimation of LiBs. 34 An online model identification and state-of-charge estimation method for LiBs based on the recursive least squares observer is proposed, 35 and a hybrid energy storage system based on the energy distribution strategy for four-wheel-drive EVs is studied. 36
In addition to the above, many SOC estimation algorithms have added the latest technologies. By using the untracked Kalman filter (UKF) algorithm, an accurate equivalent circuit modeling method of LiB based on the recurrent neural network is proposed. 37 The synergy method of EKF and UKF is used to estimate the SOC of LiB, which improves the robustness and stability of the BMS system. 38 The modified neural network model is combined with EKF to estimate the SOC of LiB. 39 An onboard adaptive model for LiB state estimation based on the proportional integral error adjustment Kalman filter is established and studied. 40 In addition, an accurate charge state estimation of LiB based on the model mismatch is proposed. 41 By constructing observer, an enhanced SOC estimation model and its online parameter identification are established, 42 and a method for LiB model identification and charging state estimation based on the iterative learning is proposed. 43 An LiB model based on the new reduced-order electrochemistry was established and the estimation method of the SOC is given. 44 The health diagnosis method of LiB energy storage based on the mechanism recognition model is studied. 45
An improved UKF algorithm is used for SOC estimation of LiBs, and two nonlinear transformations are used to improve the accuracy of the system, under the premise of ensuring the stability of the system. The Kalman gain is improved and adaptive dynamic gain adjustment module is added to solve the problem of SOC value oscillation when the state of BMS changes suddenly. To solve the influence of noise on system stability, an adaptive algorithm is proposed to predict and correct system noise and observation noise, which can effectively reduce noise error and enhance system stability.
Mathematical analysis
ECM
The LiB models mainly include pure mathematical model, electrochemical mechanism model, thermal management model and ECM, among which the ECM is the most widely used. Common ECMs include Rint, Resistance -Capacitance (RC), Thevenin, partnership for a new generation of vehicles (PNGV) and general nonlinear (GNL) models. The advantages and disadvantages of the above common ECMs are shown in Table 1.
Advantages and disadvantages of different models.
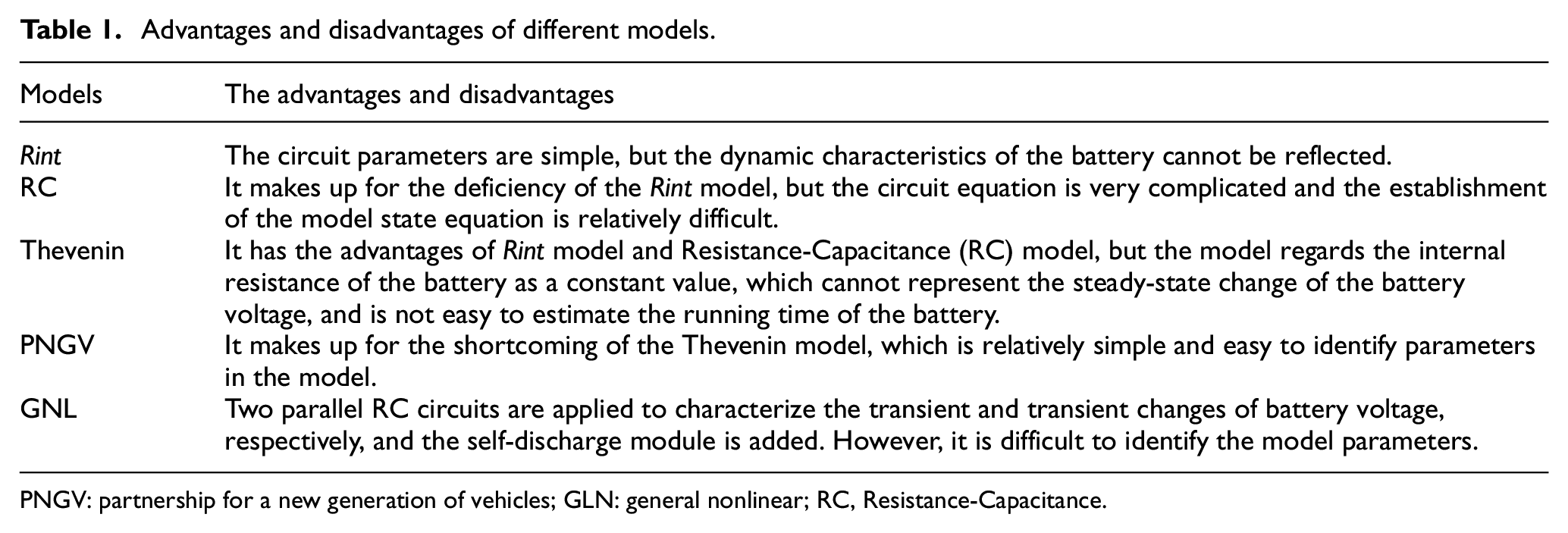
PNGV: partnership for a new generation of vehicles; GLN: general nonlinear; RC, Resistance-Capacitance.
Because the working condition of UAV is more complicated, it requires higher precision of the model. Among the above five models, PNGV and GNL models have the highest accuracy. Compared with the GNL model, PNGV model has simple structure and less difficulty in model identification, which meets the requirements of parameter measurement in dry environment under complex working conditions of UAV. However, as the PNGV model could not completely represent the relaxation effect of the battery, this paper improved it and simulated the unrepresented relaxation effect in the original PNGV model through another parallel RC branch, so as to make it more fully meet the requirements of parameter measurement under the complicated working conditions of UAV. Therefore, the second-order circuit model (S-OCM) is more suitable for characterizing battery status in dynamic environments. The circuit coupling relationship of the S-OCM is shown in Figure 1.
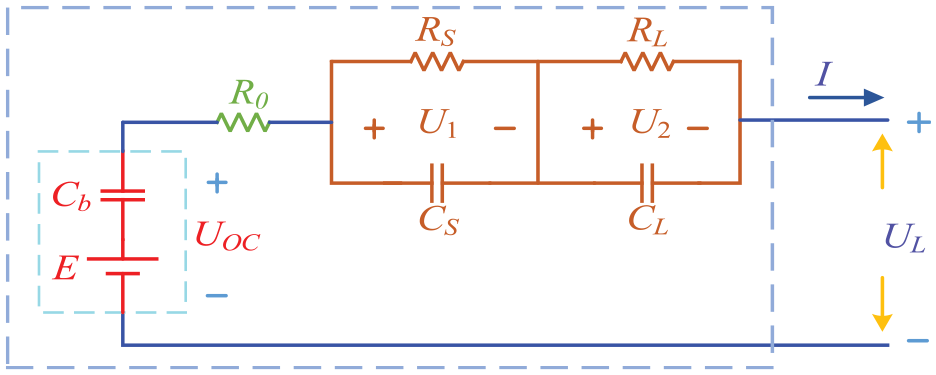
The second-order circuit model.
In the above S-OCM, on the basis of the PNGV model, a parallel RC circuit was added and E is the ideal voltage source. R0 is the ohm resistance. RS and RL are the polarization resistance. CS and CL are the polarization capacitance. Among them, the parallel circuit composed of RS and CS has a small time constant, which is used to simulate the process of rapid voltage change when the current changes suddenly. The parallel circuit composed of RL and CL is used to simulate the rapid change of voltage when the current changes suddenly because their time constant is relatively large. The battery charging and discharging current takes I as the parameter and UL as the battery terminal voltage. The S-OCM can better characterize the polarization characteristics of the battery, and it lays a foundation for UAV to maintain high stability and robustness when flying in the ever-changing environment
The calculation of ampere-hour integration is as follows

wherein SOC(t0) and SOC(t) represent the SOC value of the battery at the initial time and at time t, respectively. I is the charge and discharge current, and

wherein TS is the sampling time and wk-1 and vk are the system noises, which are not related to each other.
Parameter identification
In view of the difference in the internal resistance of LiBs in the charging and discharging process, the selected LiBs are tested with the hybrid pulse power characterization (HPPC) test of the main charging process and HPPC test of the main discharging process. The HPPC test steps of the main discharge process are summarized in Table 2.
HPPC test steps of the main discharge process.
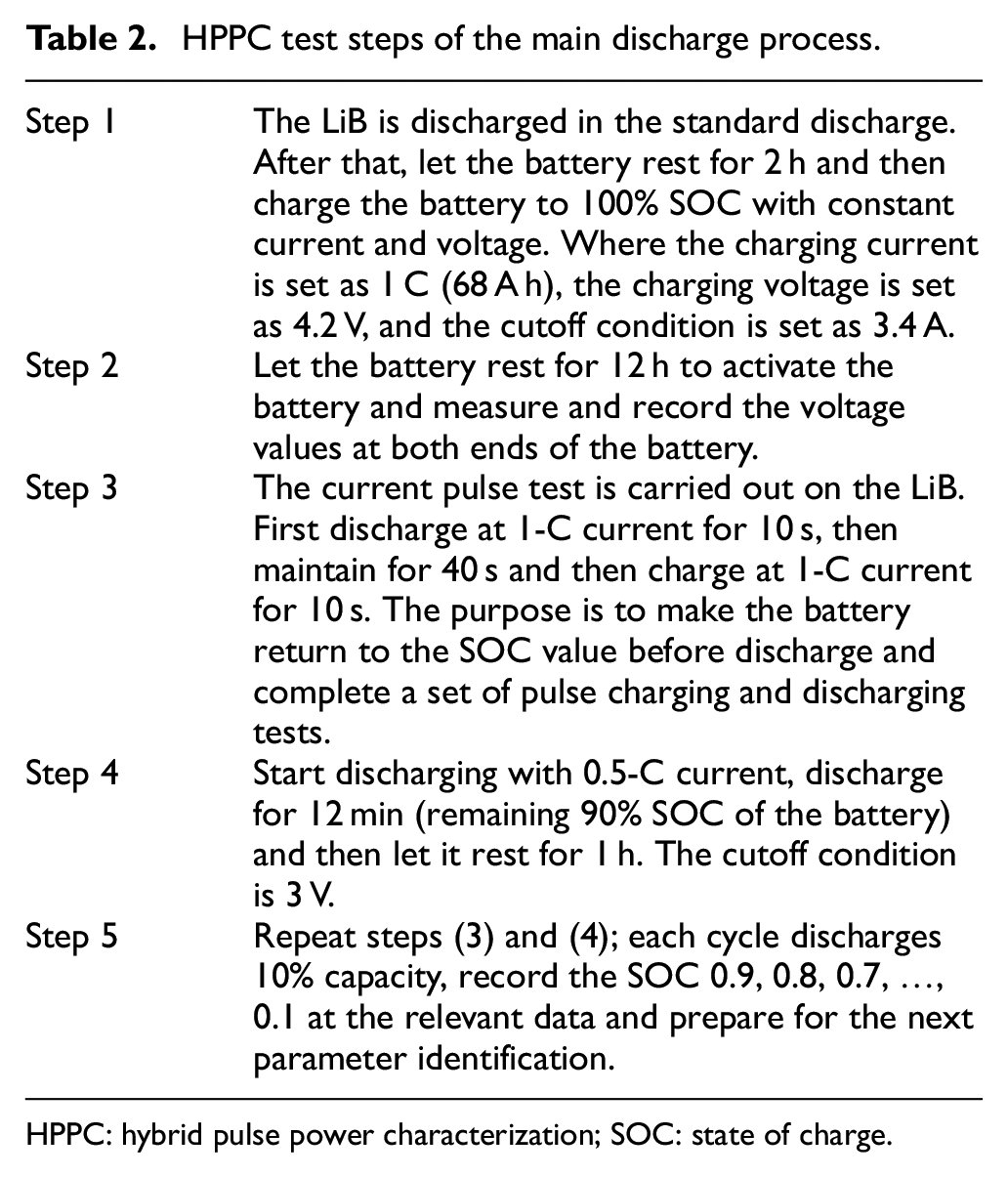
HPPC: hybrid pulse power characterization; SOC: state of charge.
Similarly, change the above fourth step to start charging at 0.5-C current. The charging time is 12 min, and the experimental data are recorded, which is the HPPC test process of the main charging process. The change of voltage and current of a single group in the HPPC experiment is shown in Figure 2.
Schematic diagram of current and voltage curves in HPPC experiment: (a) the HPPC single-cycle current profile and (b) the HPPC single-cycle voltage profile.
The features of the voltage response curve of the HPPC test are used for parameter identification, and the features are shown in Table 3.
The features of voltage response curve of HPPC test.
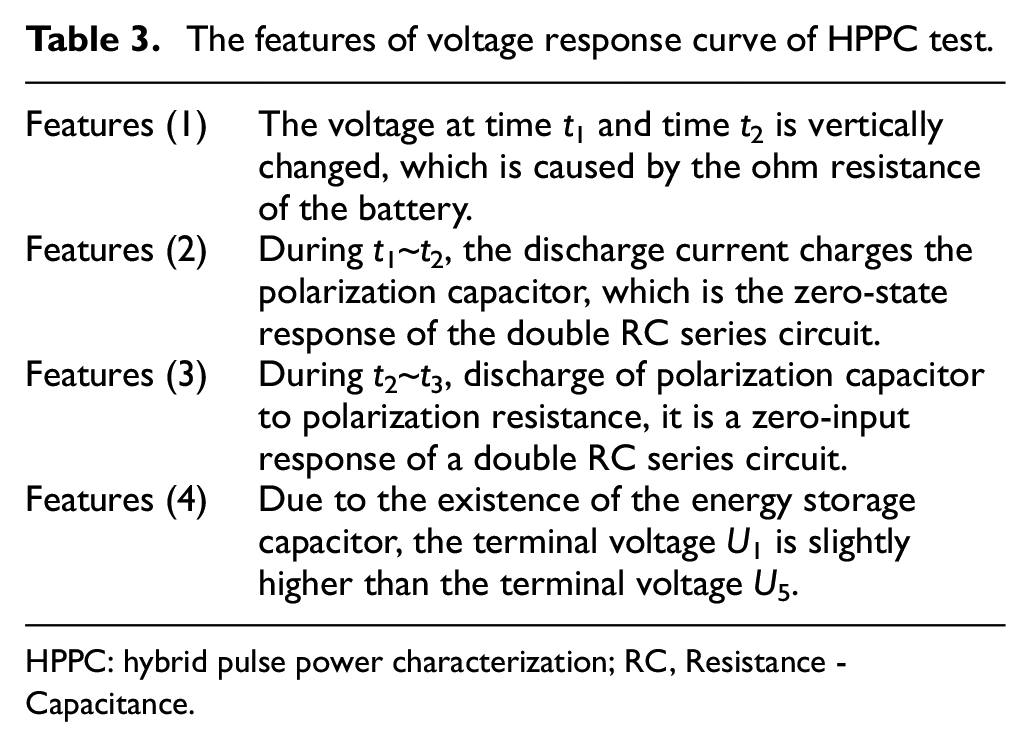
HPPC: hybrid pulse power characterization; RC, Resistance -Capacitance.
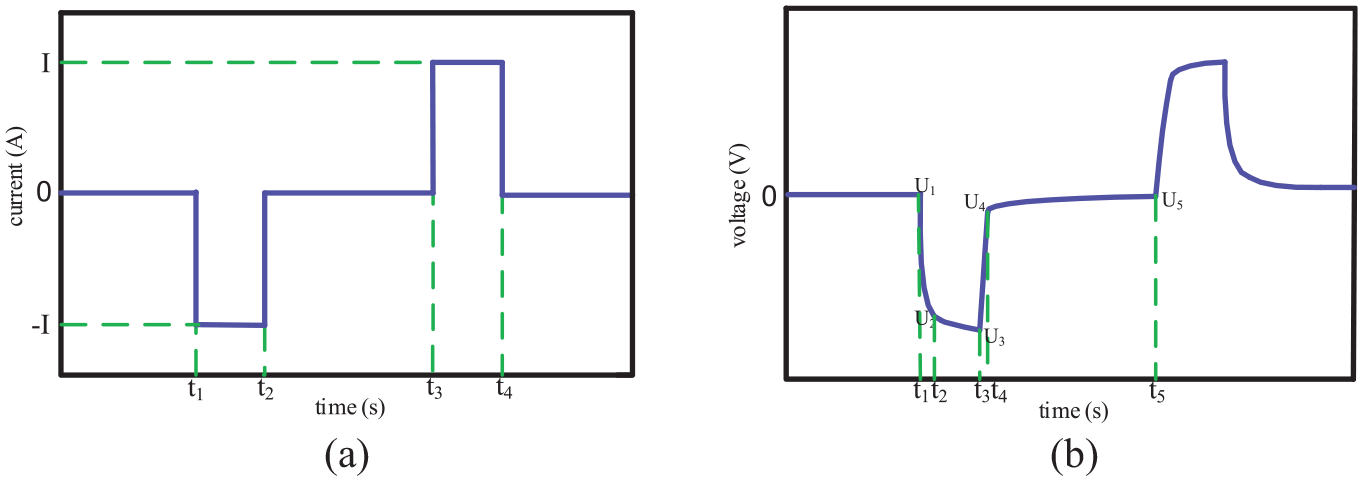
It can be seen from Table 2 that the values of R0 and Cb in the S-OCM can be directly obtained from features (1) and (4). The parameter values of the double RC circuit can be identified according to the battery terminal curve of features (2) and (3).
According to feature (1), the sudden change in the terminal voltage of the battery at the start and stop of discharge is caused by the ohm internal resistance. Therefore, the ohm internal resistance can be calculated through the ohm law, as shown in equation (3)

When the LiB is in the pulse discharge stage of HPPPC experiment, let the flow direction of Ib be the positive direction of current. According to the reference direction of voltage and current in the figure, Kirchhoff’s current law (KCL) and Kirchhoff’s voltage law (KVL) equations can be listed, as shown in equation (4)

wherein U1 is the terminal voltage of the parallel circuit composed of RS and Cs and U2 is a shunt terminal composed of RL and CL.
According to Figure 2(a), the battery is constantly exiled for 10 s during t1∼t3 and remained in a static state for the rest of the time. By time-domain analysis of two RC circuits in series, the voltage of RC network can be obtained as shown in equation (5)
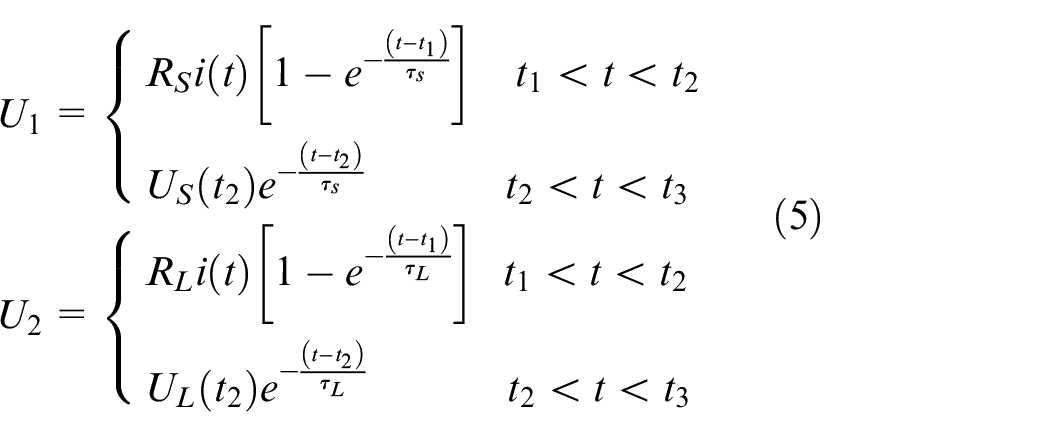
wherein t1 is the start time of discharge, t2 is the stop time of discharge and t3 is the shelving stop time. τS is the time constant of RS and CS parallel circuits, τL is the time constant of RL and CL parallel circuits. The calculation formulas of τS and τL are shown in equation (6)

Related to the SOC of the battery are: the battery during discharge, polarization capacitance CS and CL in charging status, the voltage of the parallel connection circuit of RC exponential rise, after the batteries from discharge into the quiet place, capacitance CS and CL to separate parallel resistance discharge, and the voltage value of RC parallel circuit drops. When using Matlab for HPPC experimental data curve fitting, the reuse method of undetermined parameters can be calculated for values of the RS, RL, CS and CL in the S-OCM. The specific methods are shown in Table 4.
The experimental procedure of HPPC test.
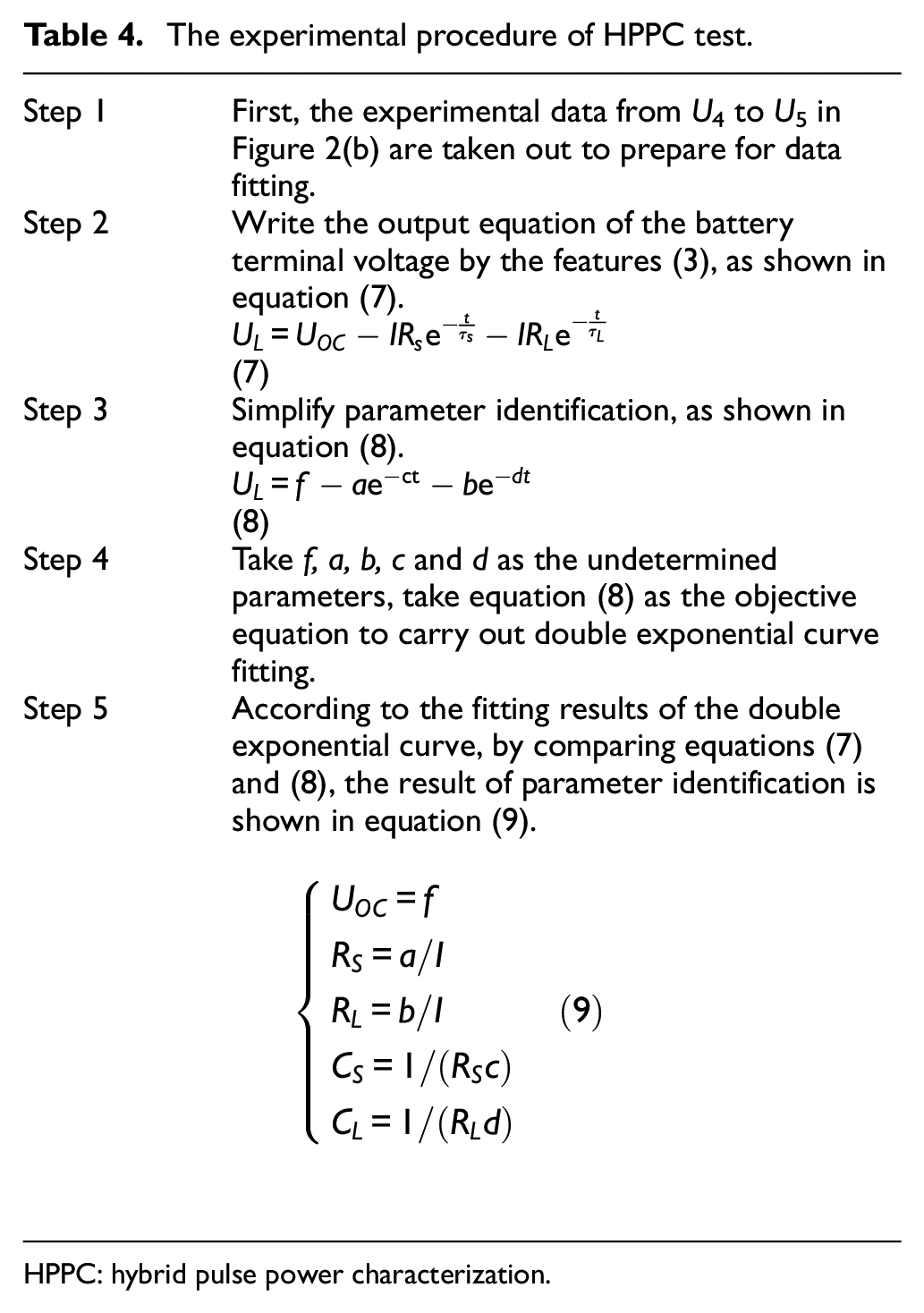
HPPC: hybrid pulse power characterization.
Iterative calculation
The interior of the LiB is a typical nonlinear system. The battery OCV, battery internal resistance, battery terminal voltage and battery charge state all show strong nonlinear changes under battery operating conditions. The nonlinear Kalman filter includes EKF, UKF and so on. The forced transformation of EKF’s nonlinear system into a linear system will cause the Taylor truncation error. The method of neglecting higher order terms may diverge filtering and cause the algorithm to fail. When the nonlinear strength of the system is high, the effect of EKF is not ideal. UKF is based on the unscented transformations and uses a suitable sampling strategy to approximate the distribution of state variables; the error introduced in EKF algorithm due to ignoring higher order terms is avoided. At the same time, there is no need to repeatedly calculate the complex Jacobian matrix, which makes the calculation difficult. However, according to the estimation effect under simulated dynamic conditions, when the pulse current change rate is large, the estimation error of the UKF algorithm is large. To solve the problem, the UKF algorithm is improved on the premise of the same estimation accuracy and adaptive algorithm is added into the improved UKF to predict and modify the system noise and observed noise, effectively reducing the estimation error.
Nonlinear transformation
Nonlinear transformation is the core of UKF algorithm, and its basic principle is to characterize the probability density distribution of random variables with appropriate distribution of sampling points. The nonlinear characteristics of LiB pack are described by the traceless transformation method, which avoids the estimation error caused by Taylor series expansion and high-order term abandonment. Compared with Taylor series expansion, the traceless transformation has at least second-order accuracy, and for Gaussian distribution, the third-order accuracy is achieved. The selection of untracked transformation sampling points is realized based on the correlation sequence of the prior mean value and the prior covariance matrix square root, with the principle shown in Figure 3.
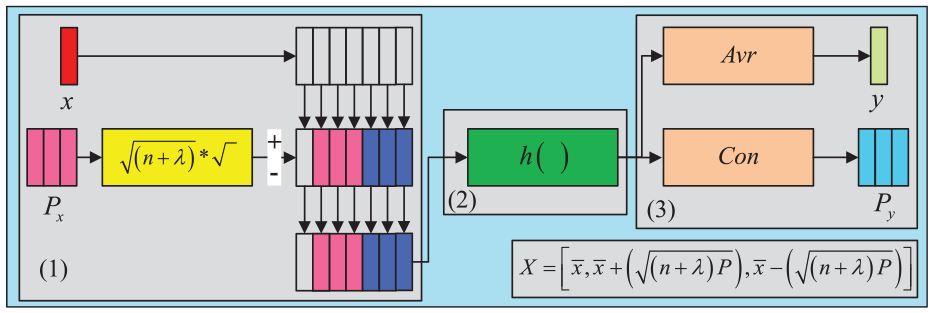
Unscented transformation schematic.
The unscented transformation shows good performance in SOC estimation. The sigma data points after transformation are obtained by nonlinear function transformation, and mean and covariance after transformation are obtained by weighted data points, and then their weighted factors are obtained.
Iterative process
Combined with the S-OCM of LiB pack, the iterative calculation of SOC is realized based on the UKF. By taking SOC as the variable in the equation of state and the open-circuit voltage as the variable of the observation equation, the expressions of the equation of state and the observation equation are constructed.
The xk is the state variable, and yk is the observed variable of working voltage output. The system noise parameter wk and the observed noise parameter vk are both Gaussian white noise, and the covariances are Q and R, respectively. By iterative calculation, the estimated xk of the Kalman filter model is calculated from the previous state value xk−1, input signal Ik and measurement signal yk. The UKF algorithm does not need to linearize the nonlinear equation of state function f(*) and the observation equation function h(*) and used nonlinear transformation processing to find the detected data points. Then, the Gaussian probability density data sequence of these SOC sample data points is calculated. The selection of sample data points is based on the nonlinear transformation processing and used in the state space description of SOC estimation of LiB pack. The 2n + 1 dimension Sigma data set and its weighting coefficients are obtained by nonlinear transformation processing. Based on the above analysis, the Sigma data set is obtained by equation (10)
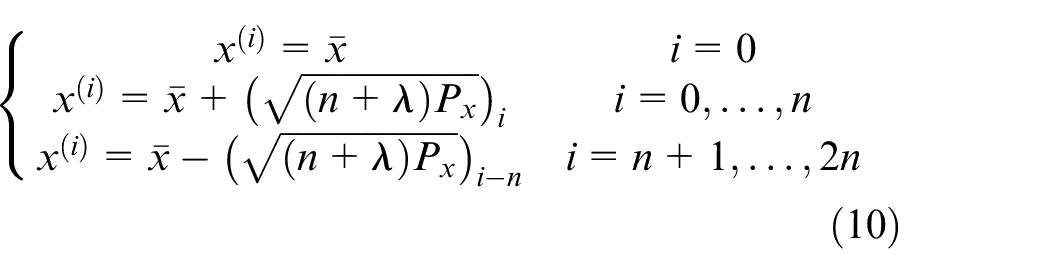
wherein n is the dimension of the state variable.
The above Sigma data set is analyzed and its corresponding weight is obtained by equation (11)
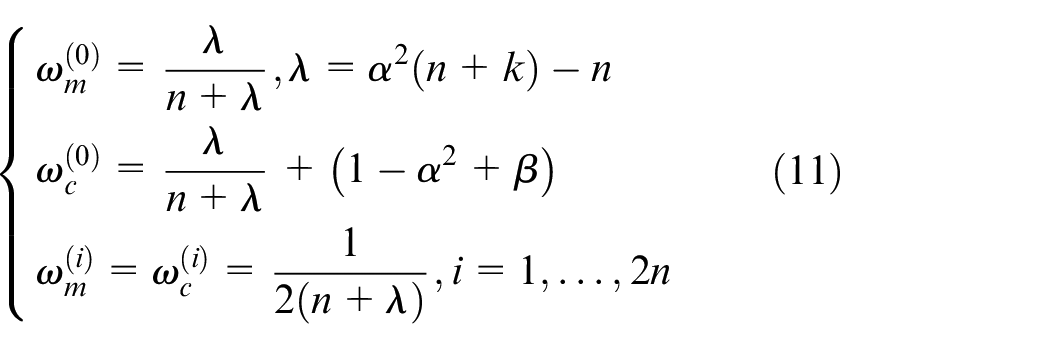
wherein
Since the computational complexity of SOC is positively correlated with the number of data points, it is more beneficial for integrated applications to use fewer data sets in transformation process. Therefore, in this paper, SOC is selected as the only state variable to implement the unscented transformation, which is used for the parameter preprocessing of SOC estimation of LiBs. The estimation process of SOC is as follows.
S1: Construction of Sigma point set, as shown in equation (12)

S2: Bringing the Sigma point set into the equation of state. One-step prediction of the state variable is obtained

S3: The state variables are updated in time based on the results of the one-step prediction and the mean and weight of the Sigma point set

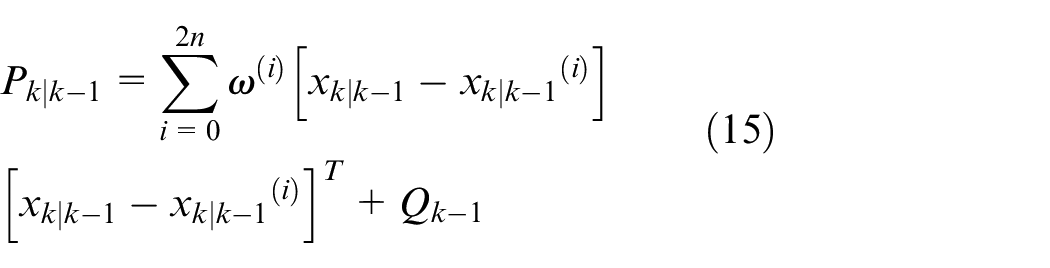
S4: According to the variance weight of the Sigma point set, the predicted value of the variance of the SOC state is updated
S5: The UT transform is used again for the state value predicted in one step to obtain a new sequence of Sigma data points for SOC estimation

S6: The Sigma point set after the double unscented transformation is brought into the observation equation of the estimation model for updating the observation variables. The update process is shown in equation (17)

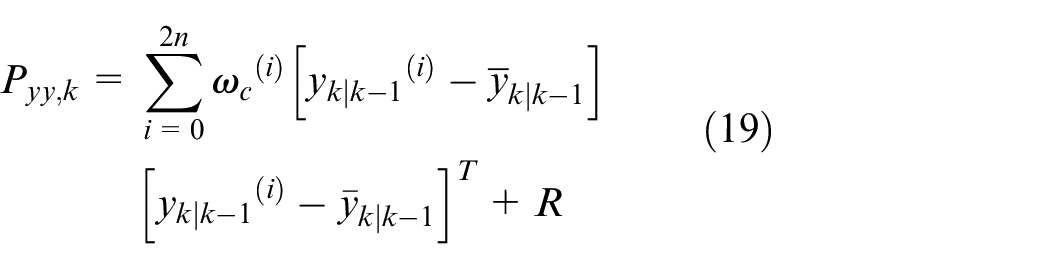
S7: Calculate the predicted value of UL and covariance matrix update.
(1) Observed value update

(2) Autocorrelation matrix update
(3) Cross-correlation matrix update
S8: Calculate Kalman gain matrix

S9: The state variable and error covariance update.
(1) The status variable update process

(2) Error covariance update

Error correction strategy
Although UKF is more robust than EKF, when using UKF to estimate the charge of LiBs, if the pulse current change rate is large, the tracking effect of the algorithm is not ideal, and the estimation error is large. The UKF algorithm is improved to solve these problems, improve the Kalman gain with dynamic function module to improve system stability. The closed-circuit voltage of the system is predicted by two nonlinear transformations to improve the accuracy of the system. Meanwhile, an adaptive algorithm is proposed to predict and correct system noise and observation noise, which makes the system more stable. The detailed flowchart of the improved algorithm is shown in Figure 4.
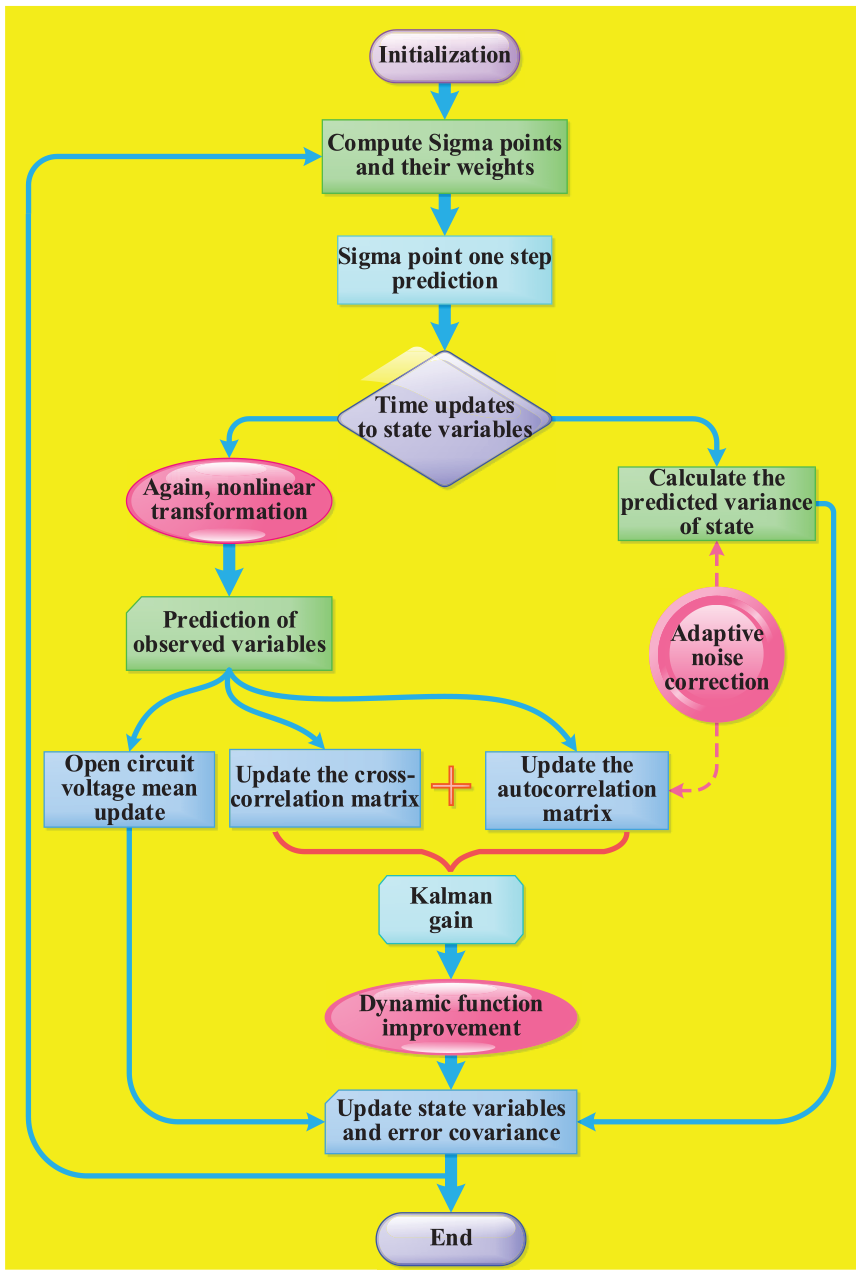
The iterative flow of the improved algorithm. The background in the figure does not need to be highlighted.
Double nonlinear transformation
In the prediction process of SOC estimation, by using unscented transformation to solve the problem of SOC estimation of mean and variance of nonlinear transformation, don’t need to calculated the Jacobian matrix, and there are no higher-order term negligence problems, so that the system has high accuracy and strong stability. Three Sigma data point sequences of SOC values and their corresponding weights
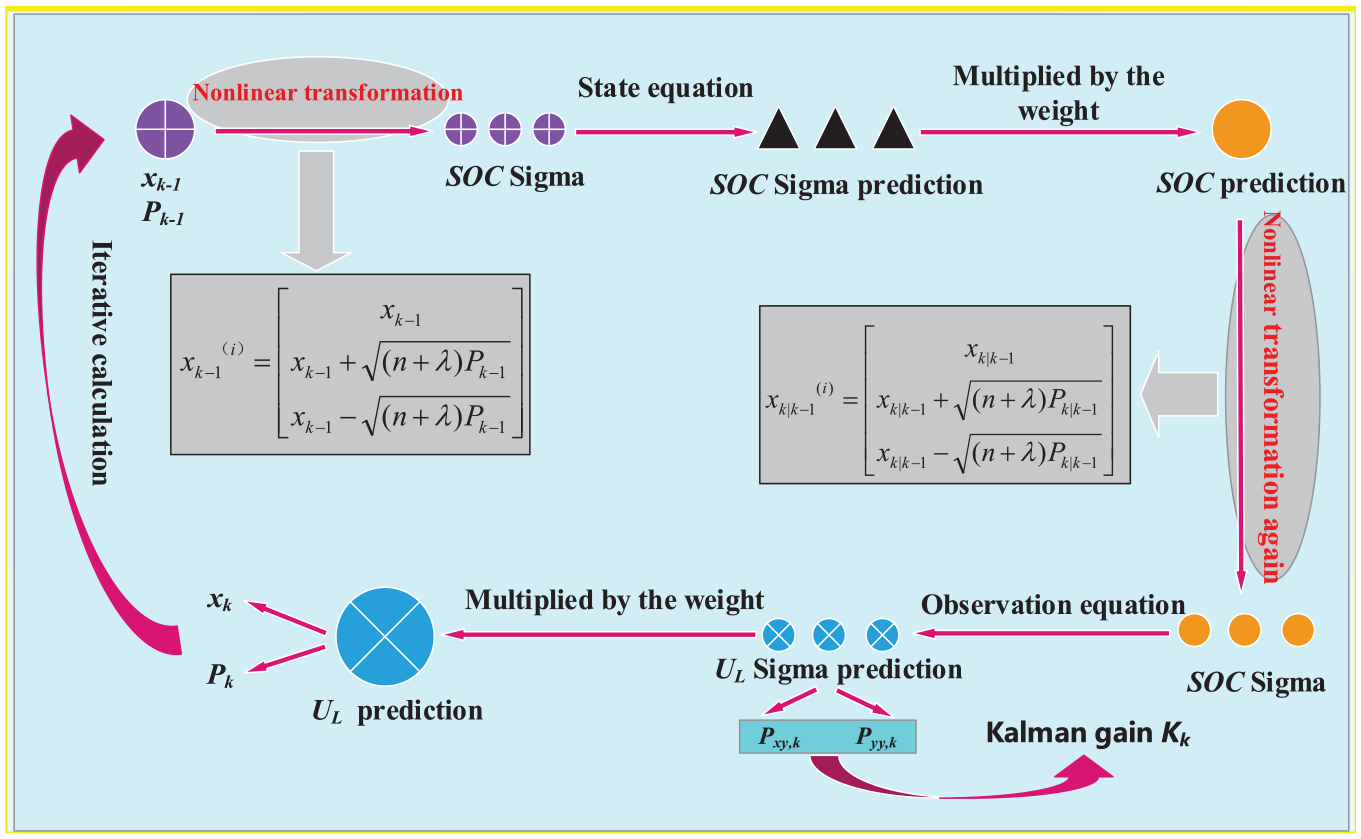
Double nonlinear transformation iterative calculation process schematic.
Dynamic function correction
According to the estimation results under simulated dynamic conditions, when the pulse current change rate is high, the estimation error is large. When Kalman filter performs filtering estimation, if the state of the system is suddenly changed, it is often slow to track the real state, thus reducing the estimation accuracy. In this paper, we will improve it to make the algorithm have better tracking effect on the estimation process.
If the change of working current meets the conditions shown in equation (24) below

wherein the

wherein the
To enhance the stability of the system, the gain is set as a dynamic value and automatically adjusted according to the change of current. When the current changes a lot in the working condition, the gain can be adjusted to a large value dynamically, so that the algorithm can estimate the speed of convergence to increase. When the current changes a little more gently, the gain value will gradually return to the original value. Then, dynamic gain calculation and state estimation measurement are updated as shown in equation (26)

wherein
Adaptive noise prediction
The covariance Qk and Rk in the estimation of the algorithm have certain influence on the accuracy and stability of the system. When the Rk value is large, the gain value decreases and the filtering convergence speed is slow, at which time the filtering correction effect is small. When the Rk value is small, the gain value is large, the filtering convergence speed is fast and the filtering correction effect is large. However, the actual statistical characteristics of noise are unknown, and the set value is usually used in estimation. Inaccurate noise variance will reduce the robustness of the system. In this paper, the adaptive algorithm is applied to predict and modify the system noise and observed noise, which enhances the robustness of the system. The estimation principle is as follows:
The system noise and the covariance of the system noise are shown in equation (27)
The observed noise and the covariance of the observed noise are shown in equation (28)
wherein the calculation of

wherein the value of
According to

The analysis shows that the prediction of system noise and observed noise depends on e. Although the error of the battery model cannot be eliminated, the experimental verification shows that the adaptive algorithm can estimate the noise, improve the filtering stability and real-time adjustment ability and reduce the SOC estimation error.
Experimental analysis
Experimental platform
The UAV ternary polymer LiB is selected for the test; the actual battery capacity after measurement is 68 A h. Using the battery internal resistance tester, the internal resistance of the battery is found to be 0.67 mV. The experimental device structure is shown in Figure 6, which consists of (1) power cell high-power charge and discharge tester (CT-4016-5V100A-NTFA); (2) three-layer independent temperature control test chamber; (3) supporting experimental equipment (BTT-331C); and (4) host computer that displays measurement data and controls charging and discharging processes.
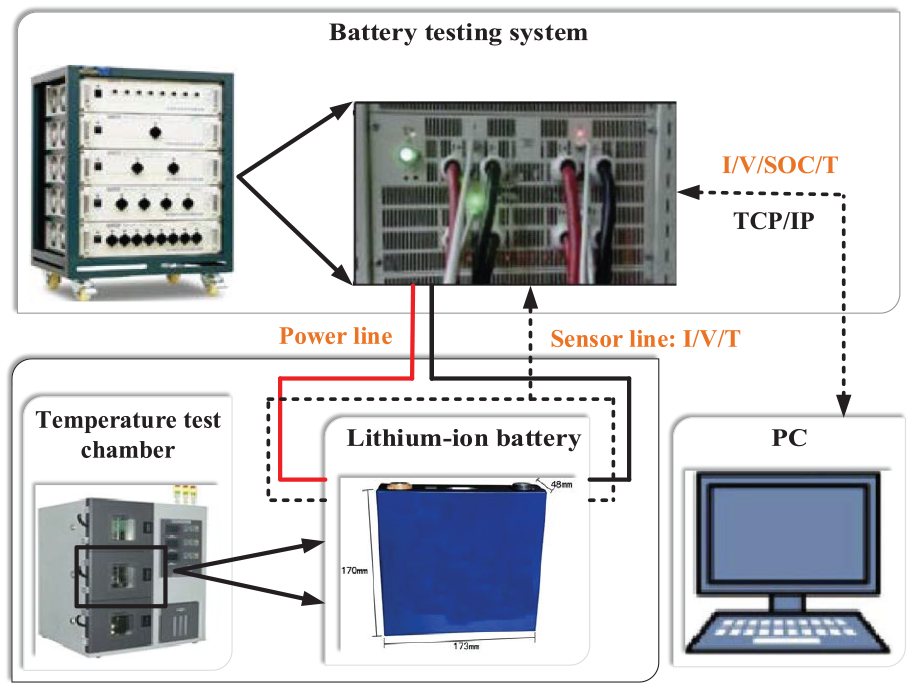
Battery test platform.
Modeling verification
The parameters of the main charge HPPC test and the main discharge HPPC test are brought into the S-OCM. The terminal voltage comparison curve obtained from the experiment is shown in Figure 7.
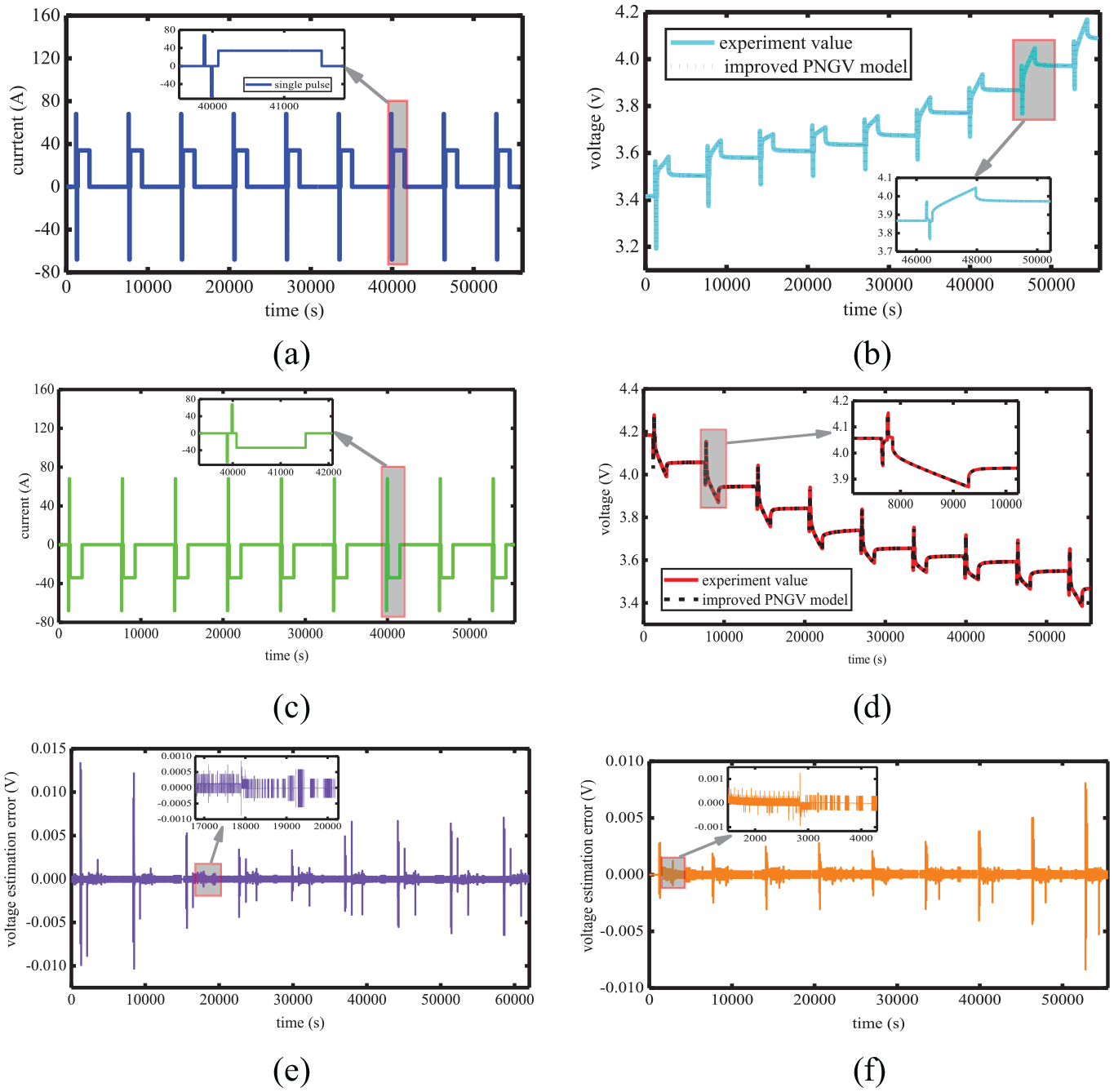
The HPPC test index curves of main discharging and charging processes: (a) HPPC test current curve of the main charge, (b) terminal voltage and voltage estimation, (c) HPPC test current curve of the main discharge,
According to the voltage error curve shown in Figure 7(e) and (f), the S-OCM can well estimate terminal voltage during charging and discharging. Among them, the maximum parameter identification error of the HPPC test of the main charging process is less than 0.015 V (nominal voltage is 4.2 V), and the maximum parameter identification error of the HPPC test of the main discharge process is less than 0.01 V, laying the foundation for follow-up research.
Complex discharge ratio experiments
For the purpose of verifying accuracy and stability of the improved algorithm, complex discharge ratio experiments are designed to more accurately analyze and describe the operating characteristics of UAV LiBs. In the experimental process, SOC estimation performance test under complex converter conditions is realized by combining converter simulation experiments with different discharge current multiples. The experimental correlation curve is shown in Figure 8.
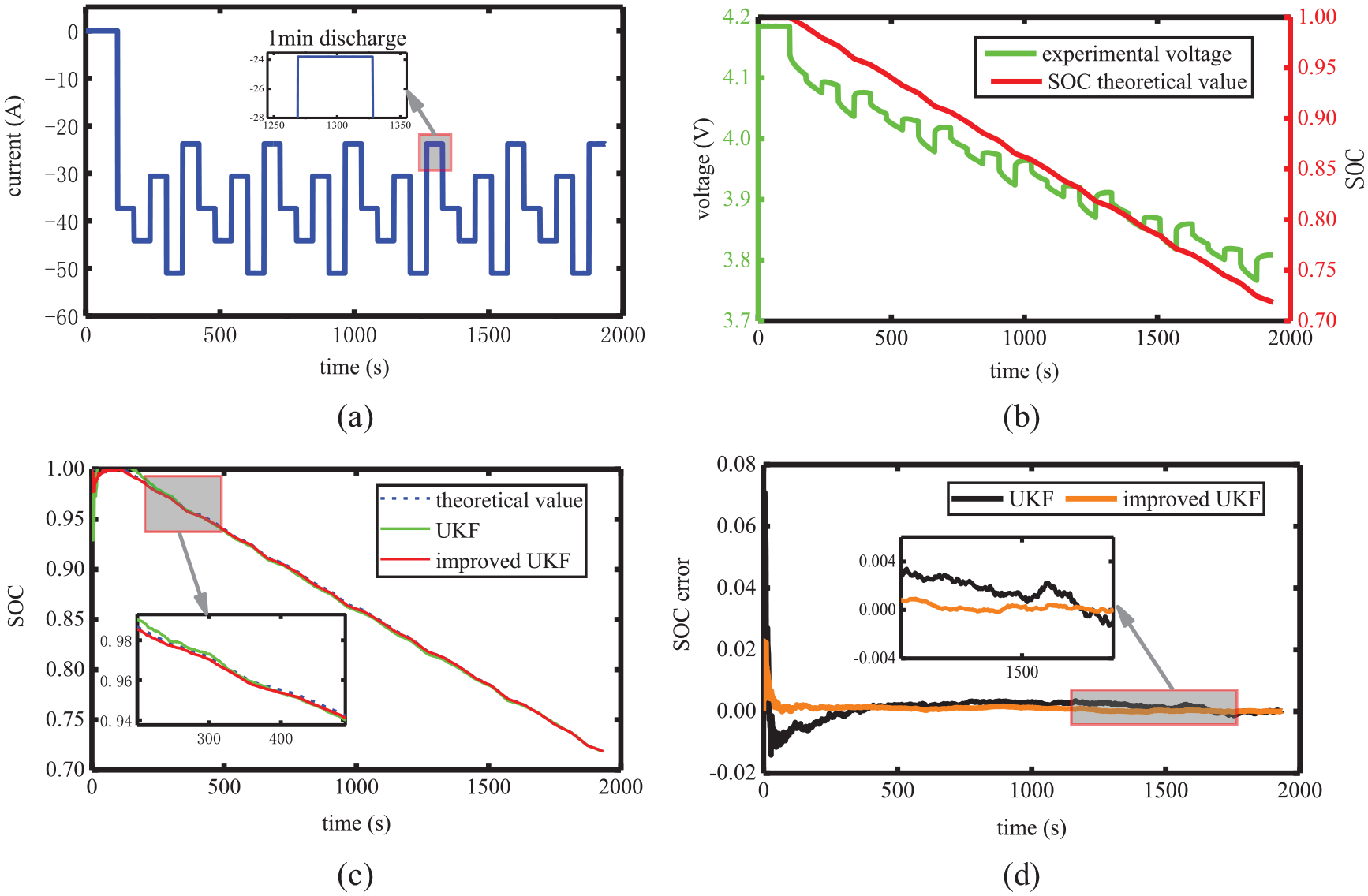
The complex discharge ratio experiment index curves: (a) current profile of the complex discharge ratio experiments, (b) the terminal voltage and SOC profiles of the complex discharge ratio experiments, (c) estimated result comparison of different methods and (d) estimated error comparison of different methods.
As can be seen from the complex discharge ratio experiment index curves, it can be seen that due to periodic polarization effect of initial discharge point and final discharge point, the estimation error of UKF algorithm is up to 1.8%. The improved UKF algorithm also has the maximum error in the initial estimation, but the SOC estimation error is only 1%. Compared with the traditional algorithm, the improved algorithm can reduce the estimation error by about 0.8%.
Phased working condition experiments
In order to verify the improved UKF for the reliability of UAV in the process of practical work, the phased working condition experiments are designed. In practical applications, LiBs are used not only for unlocking and starting UAV in normal flight but also for online calibration of sensors and emergency output. The overall experimental test process is shown in Figure 9.
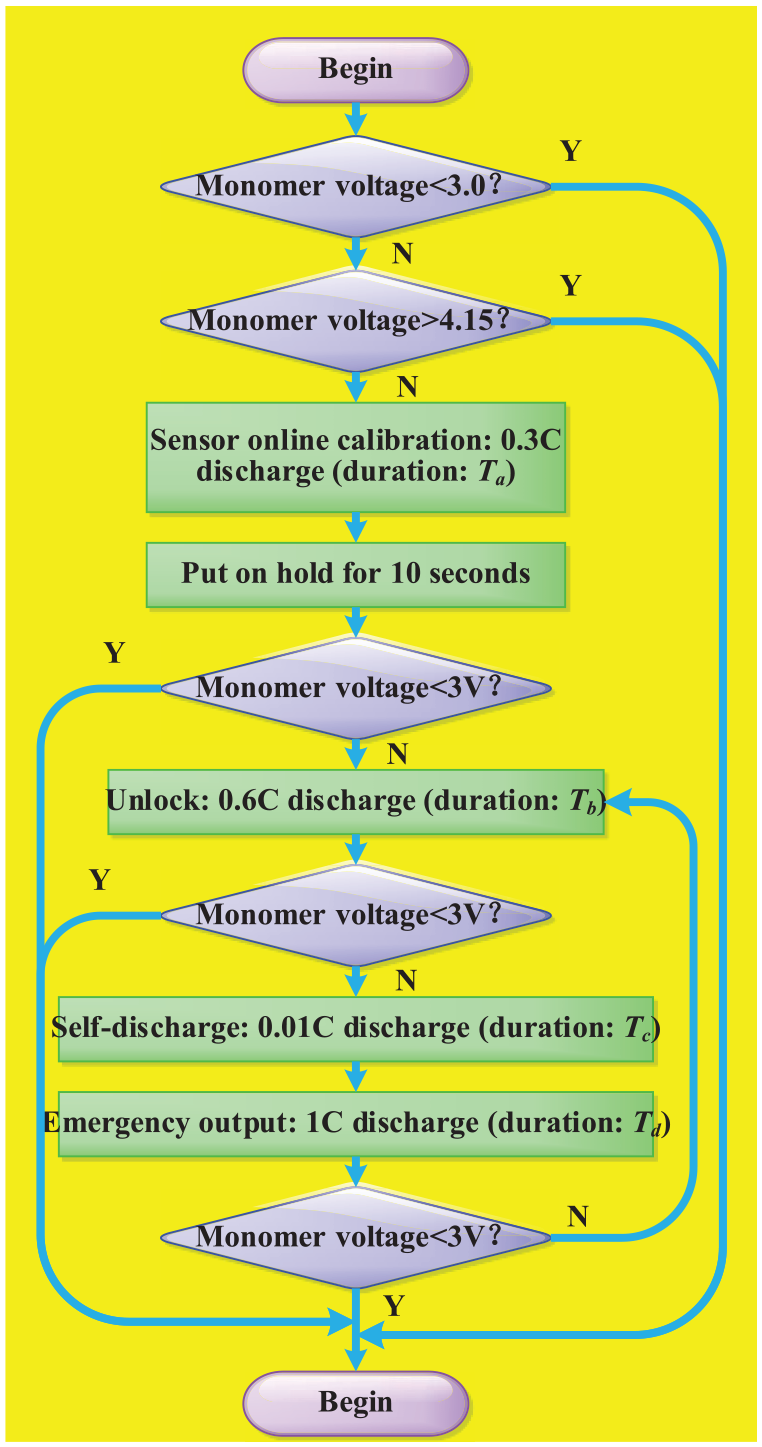
UAV experiment tests the flow of working conditions. The background in the figure does not need to be highlighted.
In Figure 9, Ta is the time required for sensor calibration, Tb is the unlocking start time of UAV, Tc is the self-discharge time during UAV flight and Td is the emergency output time of UAV LiBs. The test process is described below. S1: the system detects whether the total voltage of the UAV LiB is greater than the minimum voltage of 3.00 V. S2: discharge Ta second at 0.30 C to simulate online calibration of UAV sensor. S3: after setting aside for 10.00 s, judge whether the total voltage of LiBs is greater than the minimum voltage of 3.00 V, meeting the conditions and entering step 4. S4: simulate the unlocking and starting of UAV with 0.60-C discharge Tb second and judge whether the total battery voltage is greater than the minimum voltage at the same time. If the conditions are met, the flight mission enters step 5 or it ends. S5: simulate self-discharge of LiBs at 0.01-C discharge Tc second, and then enter step 6. S6: use 1.00-C discharge Td second to simulate emergency output and judge whether the single voltage and total voltage are greater than the minimum voltage at the same time. If the conditions are met, the flight mission can continue, otherwise it will end. S7: over.
The parameters of UAV LiBs under different working conditions are set as shown in Table 5.
Working condition set.
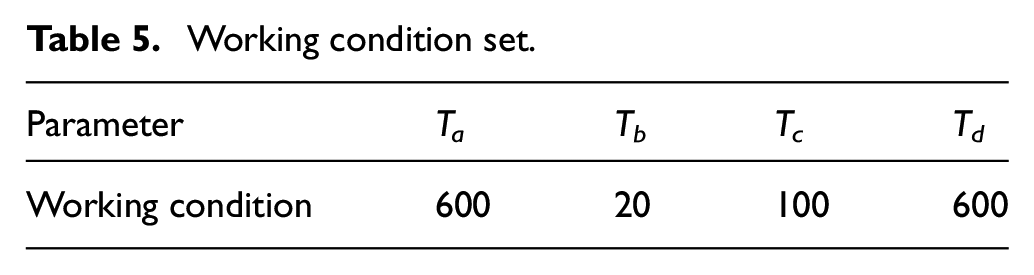
According to the data in Table 5, staged working condition tests were performed on the UAV LiB. The results are shown in Figure 10.
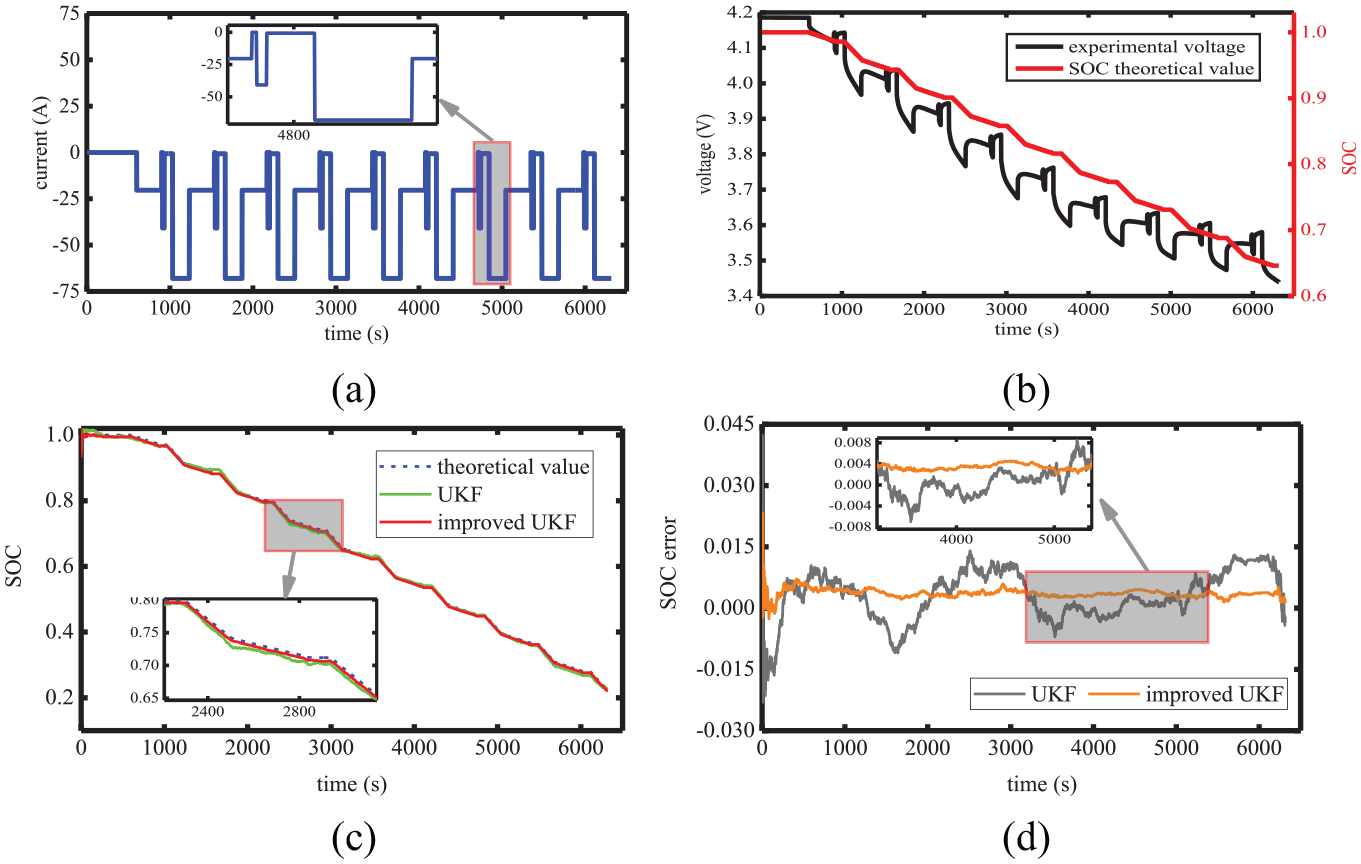
The phased working condition experiment index curves: (a) current profile of the phased working condition experiments, (b) the terminal voltage and SOC profiles of the phased working condition experiments, (c) estimated result comparison of different methods and (d) estimated error comparison of different methods.
The results show that the SOC estimation under UKF has obvious oscillation under the condition of drastic changes in operating current, and the improved method can make the lithium-ion BMS of UAV more robust and ensure the safety of UAV flight mission. As can be seen from the figure above, under the UKF algorithm, the maximum error voltage of the terminal voltage of the ion battery is about 0.07 V, and the error percentage is about 1.8%. The maximum error of the short voltage under the improved UKF algorithm is about 0.03 V, and the error percentage is about 0.7%. In comparison, the improved algorithm is superior not only in robustness but also in accuracy, which meets the requirements of UAV BMS.
Compound noise effect
Based on the above experiments, the adaptability of the improved UKF algorithm to noise is studied. Due to flaws in processor computing conditions, it is inevitable to have the problem of decimal number reservation and high-order item abandonment in the process of iterative calculation, and then, the process noise is generated, which affects the SOC estimation results. In addition, as the parameters such as voltage, current and temperature of the external measurable signal of LiB pack are affected by the sampling accuracy of the sampling module, it is inevitable that sampling error will occur, which will cause observation noise and further affect the SOC estimation results. Therefore, based on the practical application considerations and based on the verification of SOC estimation accuracy, it is necessary to further carry out the influence experiment of compound noise and carry out the experimental verification of the adaptability of the improved algorithm in terms of working conditions, so as to ensure that the method has a high estimation accuracy under various interference factors.
To verify the adaptability of the improved algorithm to compound noise, set the corresponding relationship between the change values of process noise and observation noise as shown in Table 6.
Correspondence table.
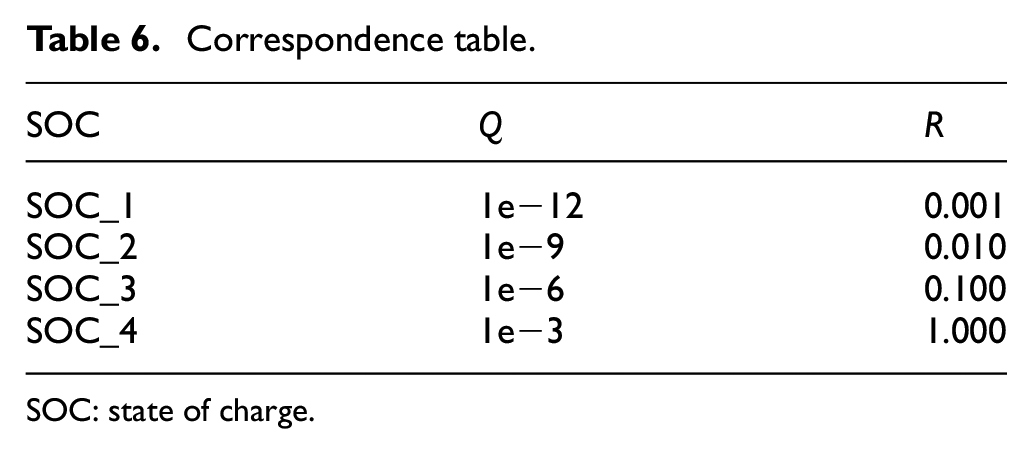
SOC: state of charge.
The SOC estimation results are obtained through experimental analysis, as shown in Figure 11.
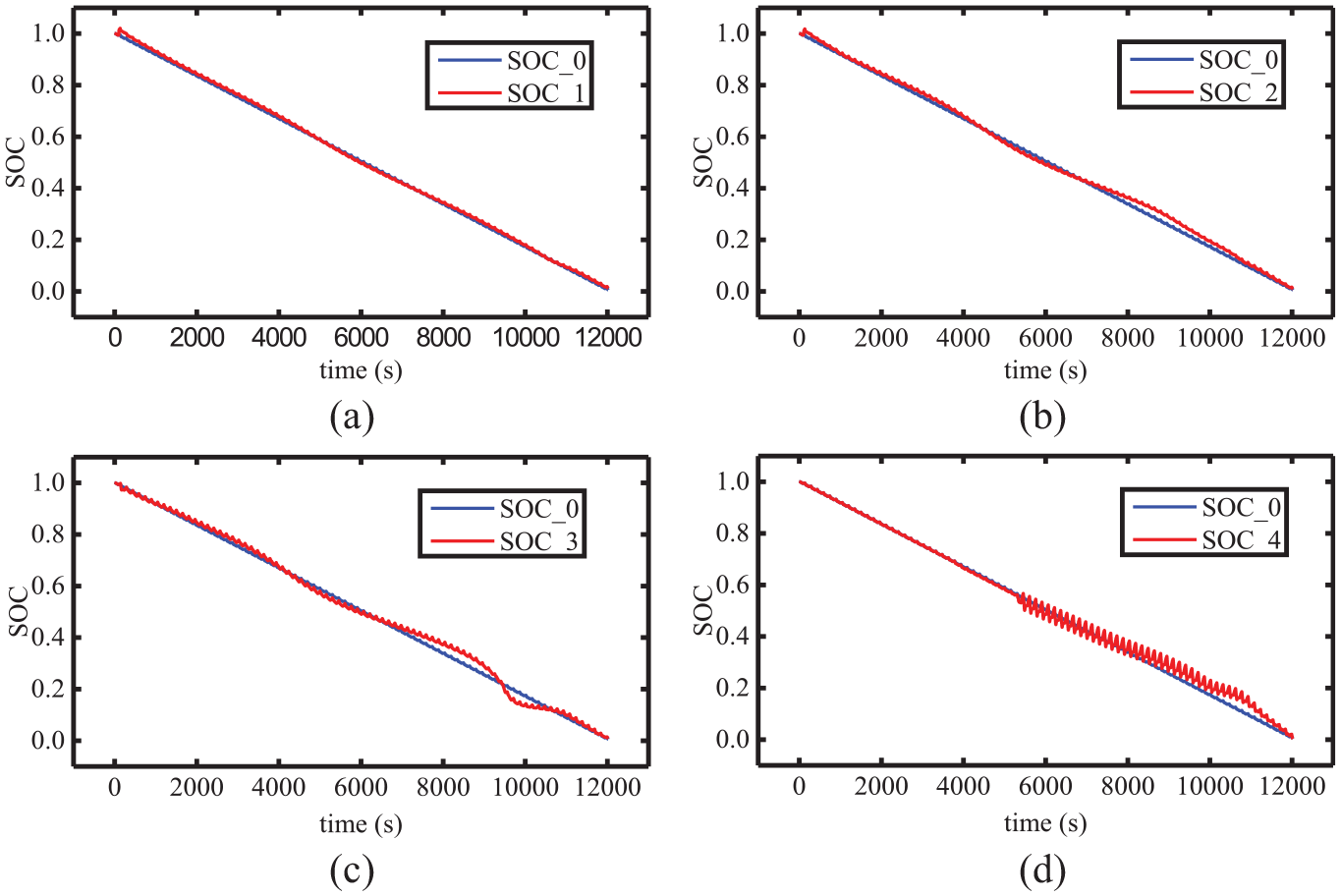
Estimated result of different compound noise.
In Figure 11, SOC_0 is obtained by Ampere-Hour integral method. From the results of the experiment, in the case of poor equilibrium state, the modified algorithm has obvious correction effect. When the process noise is small, the experimental value can converge to the actual value in the whole simulation process. With the increase in process noise, the overshoot of the system starts to increase, but the experimental value converges to the real value quickly under the dynamic modification of the improved algorithm, which further verifies the advantages of the improved algorithm in the estimation effect.
Conclusion
To fully meet the requirements of parameter measurement in the complex working environment of UAV, an S-OCM is established to describe the battery state in the dynamic environment. In addition, to solve the problem that the tracking effect of the algorithm is not ideal and the estimation error is large when the pulse current change rate is large, the dynamic function module is used to improve the Kalman gain, and two nonlinear transformations are used to predict the closed-loop voltage of the system. To solve the influence of noise on system stability, an adaptive algorithm is proposed to predict and correct system noise and observation noise, which can effectively reduce noise error and enhance system stability. At the same time, the improved UKF method is used to carry out relevant experiments on the adaptability. The equivalent modeling, different CC discharge, UAV working condition and composite noise tests were carried out to verify the feasibility of the model and algorithm in different states. The results show that the algorithm has high estimation accuracy under various simulated working conditions and interference factors. When the current input changes drastically, the estimated error of the improved algorithm can still be maintained at about 1.00%. Compared with UKF, the error is reduced by 0.80%, which is used as the basis for subsequent drone BMS research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.