
Abstract
This article presents an approach to lithium-ion battery state of charge estimation based on the quadrature Kalman filter. Among the existing state of charge estimation approaches, the extended Kalman filter–based state of charge and unscented filter–based state of charge algorithms are influenced by the linearization or the solution of sigma points. The proposed quadrature Kalman filter–based state of charge algorithm avoids these problems. Specifically, the battery system equations are built based on the second-order resistance–capacitance equivalent circuit model, and the parameters are identified according to the hybrid pulse power characterization discharging test. Then, the quadrature points and corresponding weights are defined by the Gauss–Hermite quadrature rule, and the Kronecker tensor product is adopted to solve the points of multivariate. In addition, the stability of quadrature Kalman filter–based state of charge is verified. Finally, the simulation is carried out under the discharging and urban dynamometer driving schedule condition, which demonstrates that the quadrature Kalman filter–based state of charge algorithm has a better performance compared with extended Kalman filter–based state of charge and unscented filter–based state of charge.
Keywords
Introduction
Lithium-ion battery has been widely used in our daily life, such as electric vehicle and power storage system. The lithium-ion battery has higher energy density, low self-discharging rate, and long cycle life compared with other batteries such as lead–acid battery, nickel–chromium battery, and nickel–metal hybrid battery. 1 The low discharging rate also reduces the aging of lithium-ion batteries. However, overcharging or overdischarging will damage the performance and cycle life of the battery. In order to ensure the safety and the performance of the battery, a reliable and accurate estimation method is highly desired. Accurate state of charge 2 (SOC) estimation can prevent battery from overcharging and overdischarging, which plays a key role in battery management system. 3
Existing methods mainly include three types. The first type is the ampere-hour (AH) integration method, 4 which is commonly used because of its simplicity. However, the AH integration method is an open-loop algorithm that may cause error accumulation. The second type is the neural network method. 5 This method can achieve the same estimation effect as true value theoretically. However, in practice, the data cannot contain all categories of battery working conditions, which will decrease SOC estimation accuracy. The third type is the nonlinear filter 6 algorithms. Among them, the extended Kalman filter (EKF) 7 is widely applied. However, during the process of Taylor expansion, the high-order terms are neglected that will increase the SOC estimation error. In addition, the calculation of Jacobian matrix will increase the complexity. Besides, the unscented filter (UF)8,9 algorithm is also applied in the battery SOC estimation. Although the UF algorithm does not need to solve Jacobian matrix, there is not a definite rule to determine sigma points. Thus, to improve the estimation accuracy, the quadrature Kalman filter10,11 (QKF) is adopted in this article.
Compared with existing approaches for SOC estimation problems, this article makes the following main contributions:
The quadrature Kalman filter–based state of charge (QSOC) algorithm is proposed to handle the battery SOC estimation problem. First, we define the quadrature points and weights using the Gauss–Hermite quadrature rule. Then, the Kronecker tensor product is applied to determine the multidimensional quadrature points. Finally, the SOC is estimated.
The curve-fitting approach is presented to identify model parameters. Besides, the continuous system equations are discretized in the process of SOC estimation.
We prove the stability of QSOC algorithm according to the error convergence.
This article is organized as follows. In section “Battery modeling and parameter identification,” the battery equivalent circuit model is built and the parameters are identified. Section “SOC estimation using QKF” presents the QSOC approach. Section “Simulation” shows the estimation results compared with extended Kalman filter–based state of charge (ESOC) and unscented filter–based state of charge (USOC). Finally, the conclusion is shown in section “Conclusion.”
Battery modeling and parameter identification
Battery modeling
Equivalent circuit models are widely adopted because of their simplicity and better estimation accuracy, such as the Rint model, Partnership for a New Generation of Vehicles model, and different resistance–capacitance (RC) models.
12
Among them, RC models can better reflect the battery characteristic. The estimation accuracy can be improved by adding RC branches; however, it will increase the computational complexity as well. Eventually, the second-order RC model
13
is adopted in this article and is shown in Figure 1.

Equivalent circuit model.
The continuous electrical behavior of circuit model is expressed as



where equations (1) and (2) are the state equations, and equation (3) represents the observation equation.
Parameter identification
To identify the parameters of the second-order RC model, the discharging test is carried out. The 18650 lithium-ion battery produced by TianJin Lishen Company is selected as the experimental object. Its maximum charging voltage, maximum charging current, and nominal capacity are 3.65 V, 2 C (2.7 A), and 1.35 AH, respectively. The direct-current power is the IT6942A produced by ITECH Company. It is mainly used for the battery charging test, and it has two different modes including constant current charging and constant voltage charging. The discharging device is an IT8512C+ electronic load that enables constant current discharging and pulse discharging.
OCV identification test
According to previous studies,13,14 we can see that the OCV is a function of SOC. It can be determined by discharging test. When the SOC value is more than 0.9 or less than 0.1, the battery may suffer from overcharging or overdischarging. Therefore, the SOC is tested from 0.1 to 0.9. The test is as follows: in the initial state, the battery is fully charged. Then, the battery is discharged at a constant current of 1 C within 6 min, and the SOC will decrease 10%. The curve is shown in Figure 2 by the curve fitting.

OCV–SOC fitting curve.
The relationship between SOC and OCV is expressed as

where
Hybrid pulse power characterization test
The hybrid pulse power characterization (HPPC) test is carried out to identify the model parameters. First, the battery is discharged about 10 s, and then it stands for 40 s. Figure 3 shows the HPPC test at SOC = 0.9.

HPPC test at SOC = 0.9.
As shown in Figure 3, we can see that the terminal voltage rises suddenly from A to B, which is caused by the ohmic resistance. Thus, the ohmic resistance value can be determined by

where

where
According to the experimental data, the terminal voltage (7) from A to C is similar as equation (6)

The value of

In the process of identification, the effect of the error is reduced by obtaining multiple averages.
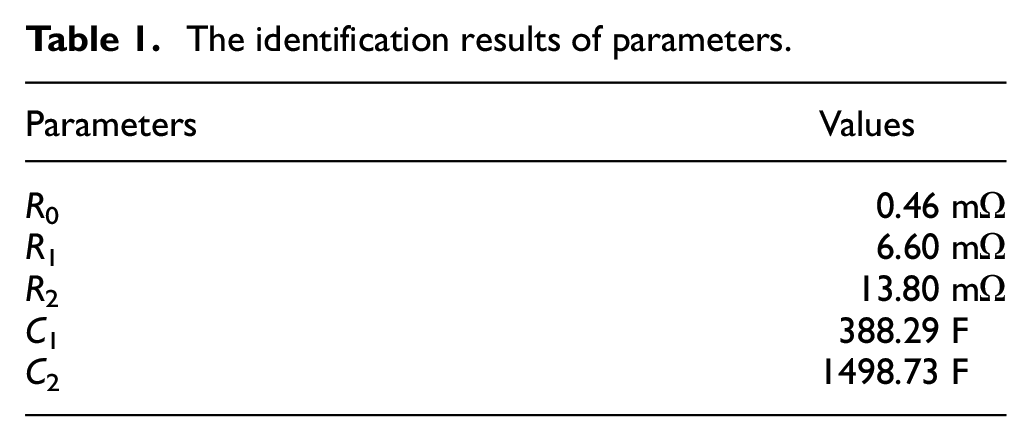
Table 1 shows the identification results of the resistances and capacitances.
The identification results of parameters.
Model validation
The state-space equation of the model has been established, and then the validity of the model is verified. The comparison between the experimental voltage and the estimated voltage is as follows.
From Figures 4 and 5, the results show that the state-space model could accurately estimate the battery voltage. The mean error is 0.039 V and the maximum error is 0.06 V in the discharging process, which demonstrates that the second-order RC model can describe the lithium-ion battery characteristics.

Comparison of experimental voltage and estimated voltage.

Error of estimated voltage.
SOC estimation using QKF
Discrete system model
SOC represents the remaining capacity of the battery. It is given by

where


where A and B represent the state transition matrix and the input control matrix, respectively. Because the model parameters have been identified, the matrices A and B are determined as follows

The system equations have been discretized and the parameters are already identified. Then, the SOC is estimated.
QKF-based SOC estimation
The QKF algorithm is applied in this section. This approach adopts a series of quadrature points and weights to estimate the mean and covariance. The points and weights can be obtained by the Gauss–Hermite quadrature rule. Combining with the SOC estimation problem, the single variable should be expanded to multivariate by the Kronecker tensor product.
Gauss–Hermite quadrature rule
Gauss–Hermite quadrature formula is expressed as

where


Suppose that the variable x obeys the Gaussian distribution

where
Assuming that J is a symmetric tridiagonal matrix with zero diagonal elements

where the quadrature points
SOC estimation with QKF
In the process of modeling, the influence of system and measurement error is considered. Thus, the lithium-ion battery state-space model can be expressed as

where
Before the SOC estimation, the quadrature points and weights should be determined. Combining with the SOC estimation problem, the quadrature points and weights of single variable cannot satisfy the process of the evaluating quadrature points. Thus, Kronecker tensor product 18 is applied to expand the single variable to a three-dimensional (3D) variable.
Suppose x is a 3D variable, and the expectation of


where
Then, the QSOC algorithm is presented as follows.
Time update step
1. Assume at time k, the posterior probability density is known, and given by

2. Evaluate the quadrature points

where
3. Evaluate the propagated quadrature points

where
4. Estimate the prediction state

where it can be described as the weighted sum of propagated quadrature points.
5. Estimated prediction error covariance

Measurement update step
1. Factorization

2. Evaluate the quadrature points

3. Evaluate the propagated quadrature points

These points can be obtained by the measurement equation.
4. Estimate predicted measurement

5. Estimate the innovation covariance matrix

6. Estimate the cross-covariance matrix

7. Estimate the Kalman gain

8. Estimate update state

9. Estimate the corresponding error covariance

Finally, we can see that
Stability of QSOC
The stability of the integral formula ought to satisfy two conditions. On one hand, the points should be in the integral interval. On the other hand, the weights should be positive. Obviously, the Gauss–Hermite quadrature points are located in the integral interval, and all weights are positive. In addition, the stability factor is defined as

where
For the convergence problem of sampling Kalman filter, sufficient conditions for error boundary are given in previous studies.20,21
Define the estimation error and prediction error by

Expanding


where
Combining equations (20) and (21), the prediction error is given by

where

where

where

The SOC state equation is a bounded function with value of [0, 1]. The change of SOC rate is also a bounded function limited by battery performance and actual operating conditions

Thus, the stability of QSOC can be verified.
Simulation
Constant current discharging test
The simulation is carried out under the discharging condition. Lithium-ion battery model parameters have been identified by experimental data and curve fitting. The battery SOC is estimated using three different algorithms (ESOC, USOC, and QSOC). In addition, the simulation performs 1000 Monte Carlo runs. The initial values are defined as

The parameters in the unscented transform are as follows

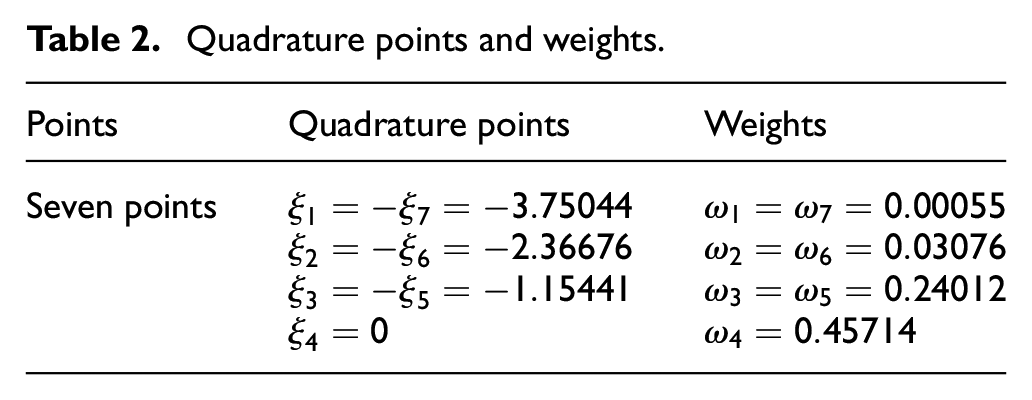
Gauss–Hermite quadrature formula can be divided into three-point, five-point, seven-point quadrature formula, and so on. The more points, the higher the estimation accuracy. The seven-point QSOC algorithm is adopted. The quadrature points and the corresponding weights are shown in Table 2, and then the points and weights are expanded to multivariable.
Quadrature points and weights.
The simulation results are shown in Figures 6 and 7, where Ref represents the reference SOC value, and the estimation error is shown in Table 3.

SOC estimation value.

SOC estimation error.
SOC estimation error.

RMSE: root mean square error; ESOC: extended Kalman filter–based state of charge; USOC: unscented filter–based state of charge; QSOC: quadrature Kalman filter–based state of charge.
From Figure 6, we can see that USOC and QSOC have similar trend in the initial phase of estimation, then QSOC can be quickly adjusted, and the tracking curve is better. Although the maximum error of the QSOC algorithm is 3.2% slightly bigger than USOC, the mean error of QSOC is 0.56%, which satisfies the SOC estimation demand. Thus, the QKF algorithm has a good application value in the battery SOC estimation problem.
Urban dynamometer driving schedule test
The urban dynamometer driving schedule (UDDS) working condition is a test method for evaluating the condition of vehicles in the United States. Its essence is to simulate the operating conditions of cities or suburbs, including accelerating climbing, deceleration, uniform speed, and so on. To verify the feasibility of the QSOC algorithm, the UDDS test is carried out. Monte Carlo runs are 100. Combined with our lithium-ion battery object, the current in the UDDS experiment is shown in Figure 8.
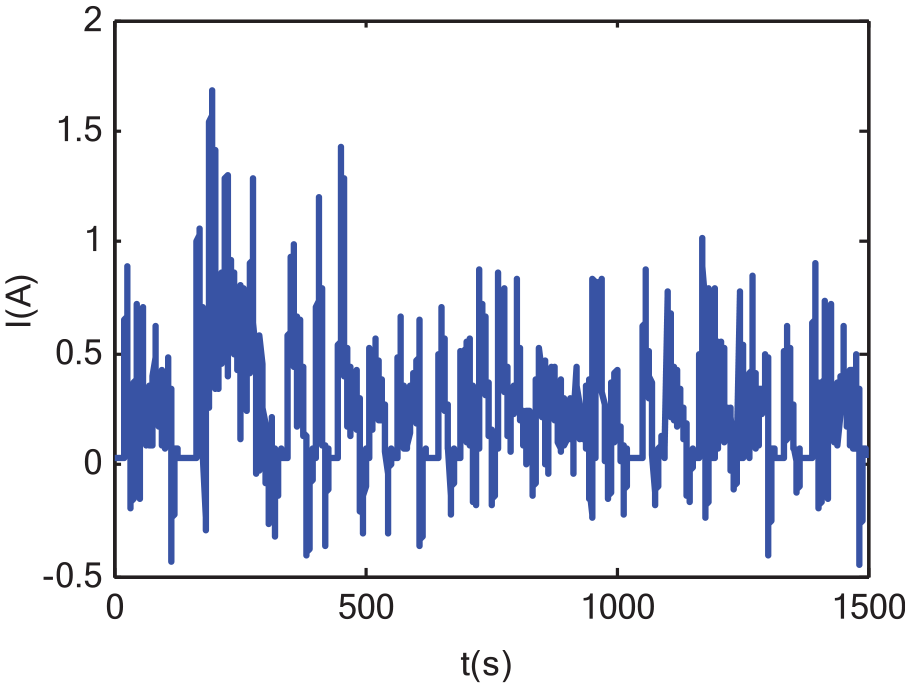
The current of UDDS test.
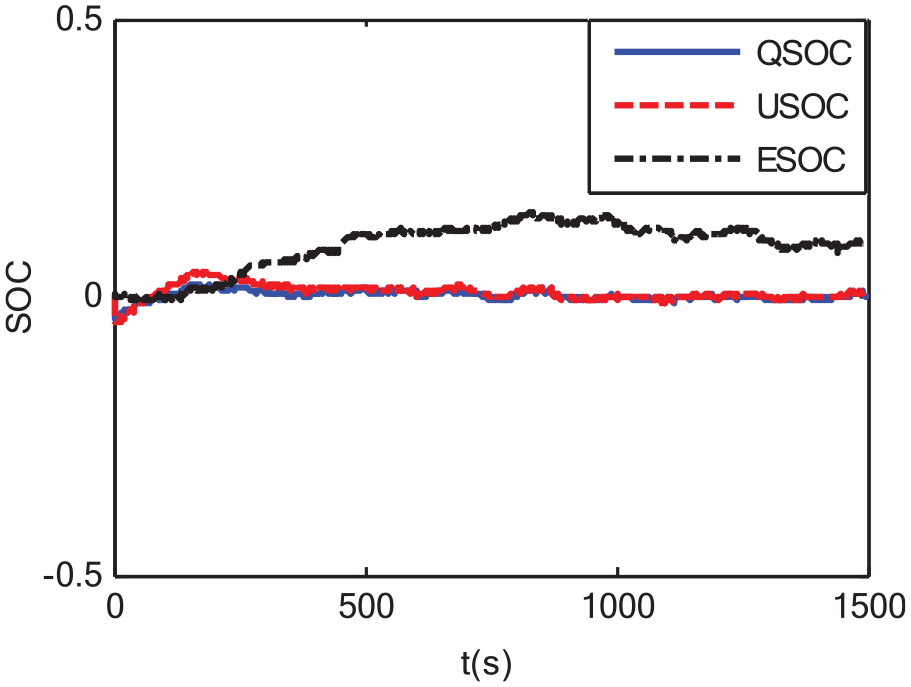
The result of QSOC, USOC, and ESOC is shown in Figure 9, and the mean error of SOC estimation is shown in Figure 10. The estimation error is shown in Table 4.

SOC estimation value.
SOC estimation error.
SOC estimation error.

RMSE: root mean square error; ESOC: extended Kalman filter–based state of charge; USOC: unscented filter–based state of charge; QSOC: quadrature Kalman filter–based state of charge.
From Figures 9 and 10, the result shows that the QSOC algorithm has a good adaption in the UDDS test. The maximum error of the QSOC algorithm is 3.91% and the mean error is 0.7%. It is of great significance to estimate SOC in real life.
Conclusion
Using the second-order RC equivalent circuit model, the QSOC algorithm is presented. This algorithm takes advantage of a set of Gauss–Hermite quadrature points and weights to estimate SOC. It does not need to solve the Jacobian matrix for linearization of system equations. The QSOC algorithm has been compared with ESOC and USOC. Simulation result shows that the maximum estimation error is 3.91% and the mean error is 0.7% in the UDDS test, which demonstrates that the QSOC has higher estimation accuracy.
Footnotes
Appendix 1
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported, in part, by grant for the Key Research and Development Program of Shaanxi Province of China (2019GY-097), the National Natural Science Foundation of China (61703329), the China Postdoctoral Science Foundation (2018M633538), the Natural Science Basic Research Priorities Program of Shaanxi Province of China (2018JQ5197), and the Scientific Research Program Funded by Shaanxi Provincial Education Department (18JK1005).