
Abstract
In this article, an enhanced 2-degree-of-freedom internal model control strategy for typical industrial processes with time-delay is developed. For the proposed controller, it is composed of an inner loop feedback controller which is designed based on the internal model control theory and a weighted set-point tracking controller. Note that the adjustment of set-point tracking performance and disturbance rejection characteristics can be decoupled by employing the developed strategy, which indicates that more degrees of freedom are obtained for the proposed controller design; thus, better ensemble performance and stronger robustness are anticipated by regulating these two controllers separately, which may not be achieved in the conventional internal model control method. Case studies on two kinds of stable processes with time-delay verify the effectiveness of the proposed scheme finally.
Introduction
Because of the simple structure, convenient parameter setting and good stability, proportional–integral–derivative (PID) controller has been widely used in industrial processes.1–3 In the past decades, there are lots of progresses on the theory and application of various advanced control technologies, which also promotes the development of PID controllers to some extent.4,5 As to the PID controller, its control parameters affect the corresponding closed-loop response greatly; therefore, the relevant tuning approaches are vital. 6 Note that many advanced control algorithms are proposed to combine with the PID design strategies, which provides new vitality for the PID control technology and the relevant tuning methods.
As to the linear systems without time-delay, traditional PID control possesses good control performance. 7 However, time-delay is inevitable in practical engineering applications. Meanwhile, the model uncertainty is another considerable factor in control system, so that the robustness of the system needs to be considered in the controller design. 8 For the time-delay in control systems, internal model control (IMC) strategy is an effective method, and the IMC-PID schemes in which the IMC approach is employed to tune PID control parameters have been investigated by many researchers.9–11 In previous studies,12–15 the design and setting method of the IMC-PID control were addressed, which solve the problem of time-delay well. In Shamsuzzoha and Lee, 16 the IMC-PID controller was designed to improve the disturbance rejection ability of the time-delay processes. The design principle is simple and the parameter setting is also straightforward and clear, but the derived IMC-PID control has only one parameter that needs to be set; thus, the degree of freedom for the relevant controller design may be limited. As to the method in Liu et al., 17 the corresponding setting is relatively simple, but good set-point tracking performance and disturbance rejection characteristics are hardly to be obtained simultaneously, because the two characteristics need to be traded off in the relevant controller design. In Tan et al., 18 an improved internal model structure design method with three compensators was developed. The structure of the IMC can be separately designed for set-point tracking and interference suppression, but the controller needs to be designed three times and the structure is complex. In Alfaro et al., 19 an analytical control method using the IMC theory was presented, and the relevant tuning formula is simple. Nevertheless, the IMC filter adopts the form of lead lag, which may result in excessive overshoots in the set-point tracking responses. An enhanced method of the IMC-PID controller was developed for various processes in Wang et al. 12 For the stable process, the virtual filter based on the zero-pole transformation was considered. A lead lag compensator was designed for the first-order additive integral and second-order plus time-delay (SOPTD) unstable processes. However, it is not suitable for the case where the ratio of the process time constant and the delay time constant is relatively large, because the corresponding set-point tracking performance may not be satisfactory. The introduction of the 2-degree-of-freedom (2-DOF) controller enables the control system to achieve good tracking performance and anti-interference performance simultaneously. A 2-DOF control structure was studied for a class of integral time-delay processes in Astrom et al., 20 where the advantage is that the set-point tracking response and external interference suppression characteristics of the system are decoupled and can be optimized separately, but the controller is too complex and has no intuitive physical meaning. In Matausek and Micic, 21 the method in Astrom et al. 20 was further improved and the relevant compensator was simplified to a constant. This makes the controller simple, but its interference suppression performance is poor. A 2-DOF control method with a set-point filter was addressed in Wang and Cai, 22 which enhances the performance of interference suppression, but the response speed of the set-point command is slow. In Lu et al., 23 a dual 2-DOF control method with good interference suppression characteristics and faster set-point tracking was investigated, but it has four controllers that need to be designed, which makes its structure more complex. The 2-DOF-PID controllers in previous studies24–26 has five or six parameters that need to be set. The method presented in Zhang and Sun 27 modified this method and gave the minimum order form of the compensator. The controller has only two parameters, but the structure of the controller is redundant. What’s more, in Yan and Yao, 28 fuzzy logic was applied to the 2-DOF-IMC method and used to modify the parameters of the filter in the IMC controller to improve control performance. A 2-DOF-PID control algorithm was implemented in Wei and Quan. 29 The controller parameters are automatically adjusted by weight self-learning, such that the set-point tracking performance and anti-interference performance of the system are optimized at the same time, but the weight coefficient needs to be corrected. Besides, there are also many other representative results about 2-DOF control strategy.30–32 These 2-DOF control methods based on intelligent control theory can overcome the influence of parameter variation and uncertainty in the control system, but the relevant control algorithms are generally more complicated.
In order to solve the above problems, this paper proposes a novel 2-DOF-IMC-PID controller design and the corresponding tuning method. In the control scheme, the IMC theory and an effective time-delay approximation method are employed, and the obtained control structure is simple. The set-point tracking and disturbance rejection are decoupled and tuned by different controllers separately; thus, more degrees of freedom are achieved for the proposed controller design. By employing the developed scheme, enhanced ensemble control performance and stronger robustness are expected. Besides, there are only two parameters that need to be set for the proposed method, and its tuning approach is also simple and targeted. The developed control strategy is tested on the first-order plus time-delay (FOPTD) and second order plus time-delay (SOPTD) processes, respectively, and the simulation results show that good set-point tracking performance and interference suppression characteristics are both achieved.
This paper is organized as follows: a brief introduction to the internal model extension structure and the approximation of the time-delay is addressed in section “IMC control structure.” In section “Design of 2-DOF-IMC structure,” the design method for the 2-DOF-IMC structure is presented, and section “Tuning method for stable processes” describes the tuning of the corresponding PID controllers for FOPTD and SOPTD processes. In section “Simulation,” the effectiveness of the proposed method is illustrated by simulations and comparisons, and conclusion is given in section “Conclusion.”
IMC control structure
The traditional IMC structure is shown in Figure 1. Here,
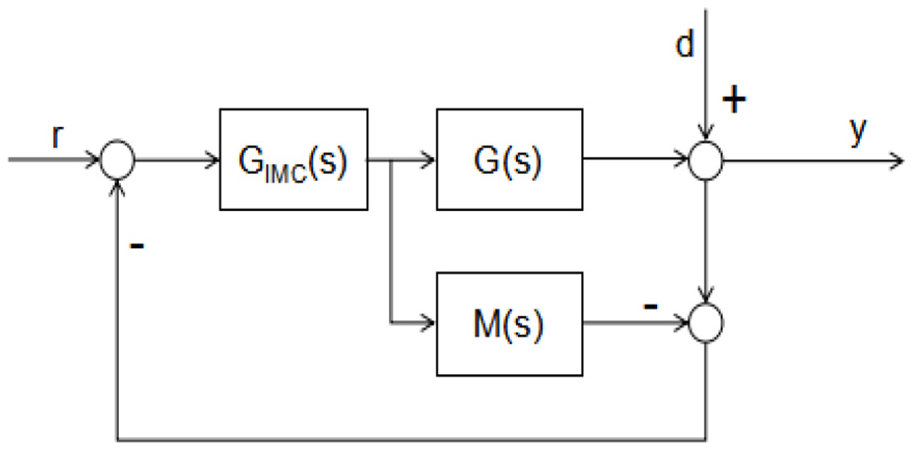
Block diagram of IMC.
The closed-loop transfer function of the system output can be derived from Figure 1
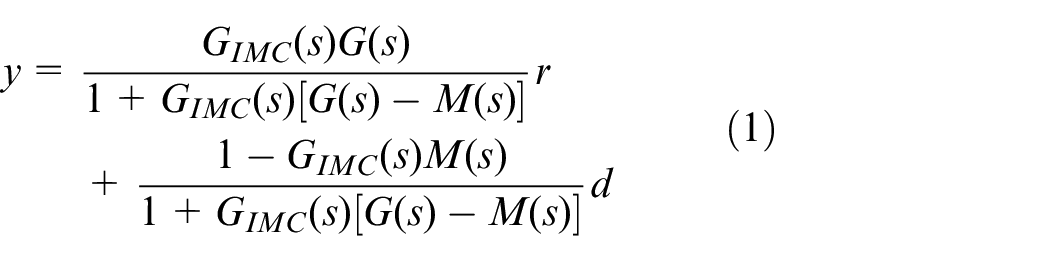
As to the transfer function in equation (1), the following formula will hold if the relevant process model is accurate, that is,

It can be known that the set-point tracking characteristics and the disturbance rejection characteristics of the controlled system are closely related to
If the process model has a right half plane zero, the controller
For a process with time-delay, the controller
In the case of model/plant mismatch, the controller
If plant and model is mismatched, the controller
In order to solve the aforementioned problems,
First, the process model is decomposed into two parts

where
Here, we select

To make the IMC achievable, a low pass filter is considered to stabilize the controller, and the relevant filter is designed as

where
Then, the IMC controller can be further described as

As to the treatment of the time-delay term in the process model, we usually choose Taylor series expansion or Pade approximation. The following approximation method is selected in this paper

For the IMC structure in Figure 1, it can be transformed into the following classic feedback control structure as shown in Figure 2.
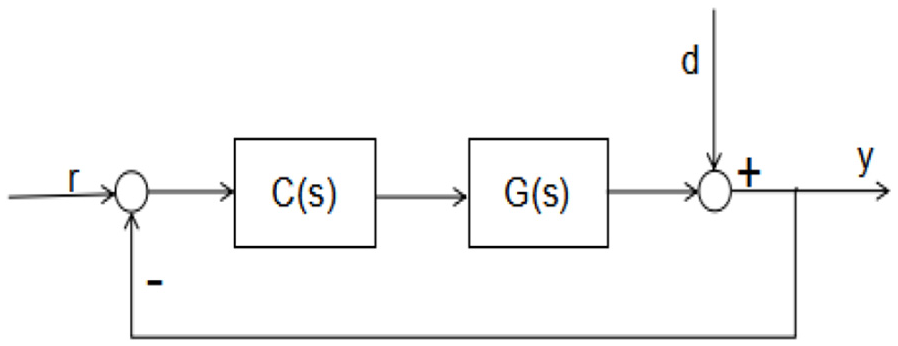
Block diagram of the classical feedback control.
Finally, we can obtain the controller

Design of 2-DOF-IMC structure
In Figure 3, the structure of the 2-DOF-IMC is shown. Here,
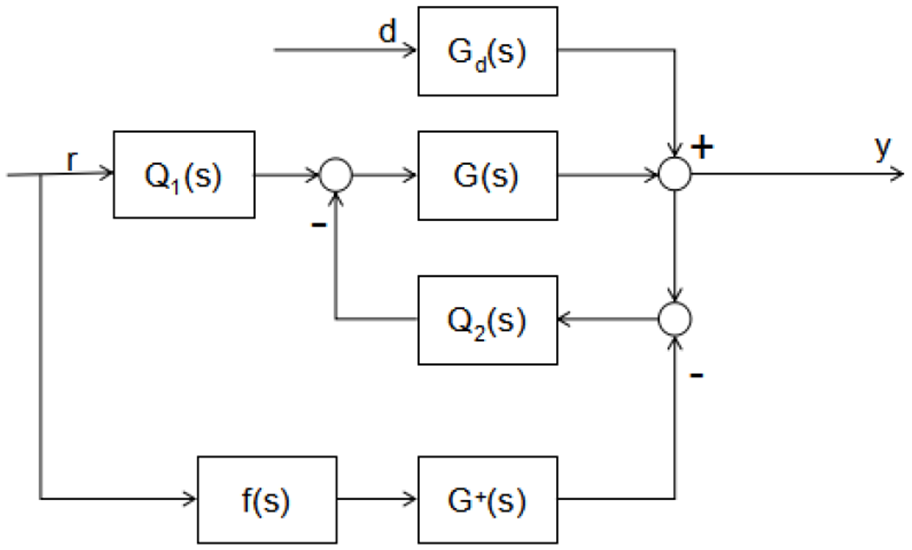
The structure of the 2-DOF-IMC.
The relationship between the system output and the disturbance can be acquired easily from Figure 3

For the closed-loop system in Figure 3, the relevant complementary sensitivity function is

then, the controller

Furthermore, the relationship formula in equation (9) can be rewritten as

Refer to Rivera et al., 35 we select the formula of complementary sensitivity as follows

where

then, we can obtain the controller

Similarly, the 2-DOF-IMC structure in Figure 3 can be simplified into the conventional 2-DOF control structure shown in Figure 4. Here,
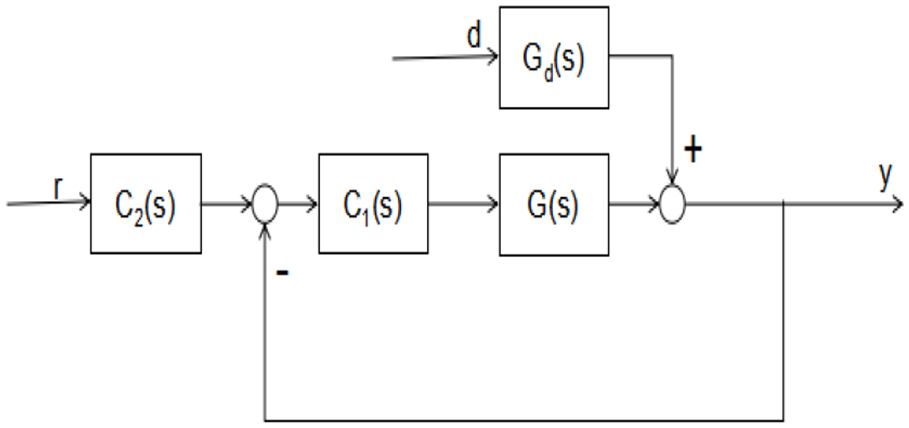
Structure of traditional 2-DOF control.
On the basis of the equivalence relationship, the following formulas hold

Furthermore, we can acquire
Through the designed two controllers, the set-point tracking and disturbance rejection are anticipated simultaneously for the controlled system. Meanwhile, more degrees of freedom are achieved for the presented scheme; thus, the robustness of the relevant system under various uncertainties will also be stronger.
Tuning method for stable processes
In the design of the 2-DOF-IMC controller, there are two adjustable parameters, that is,
In order to reduce the mutual influence, the value of

where
FOPTD processes
The FOPTD process is representative in industrial system, and the following FOPTD model is considered36,37

where
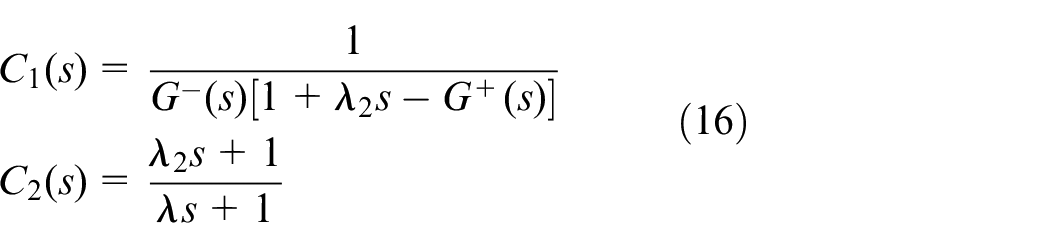
Here, the IMC filter is designed as the following form for the 2-DOF control

According to the design method described above, the controller
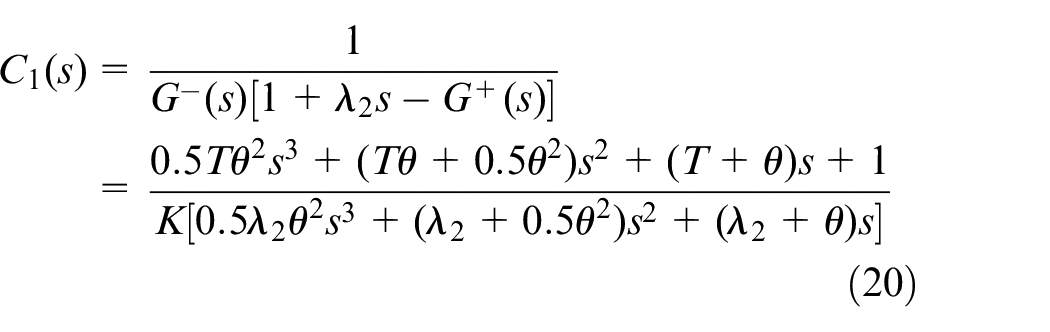
Furthermore, the controller
Consider the following PID control structure

where
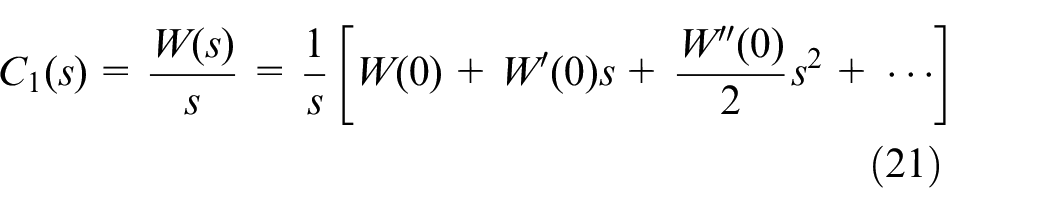
By synthesizing equations (20)–(22) and letting

then, the PID control parameters can be obtained according to the Maclaurin series expansion sequence
SOPTD processes
Here, we consider the following SOPTD process model

where
In order to obtain the corresponding PID control parameters, we can rewrite the controller
Through further calculation and simplification, the following formula is acquired
Finally, the relevant control parameters are derived

Simulation
In this section, a FOPTD process and a SOPTD process are introduced to verify the validity of the proposed approach. Meanwhile, the recently presented strategies are also employed as the comparison.
Example 1
Consider the FOPTD process in Wang et al. 12

From the process model in equation (31), it is obvious that
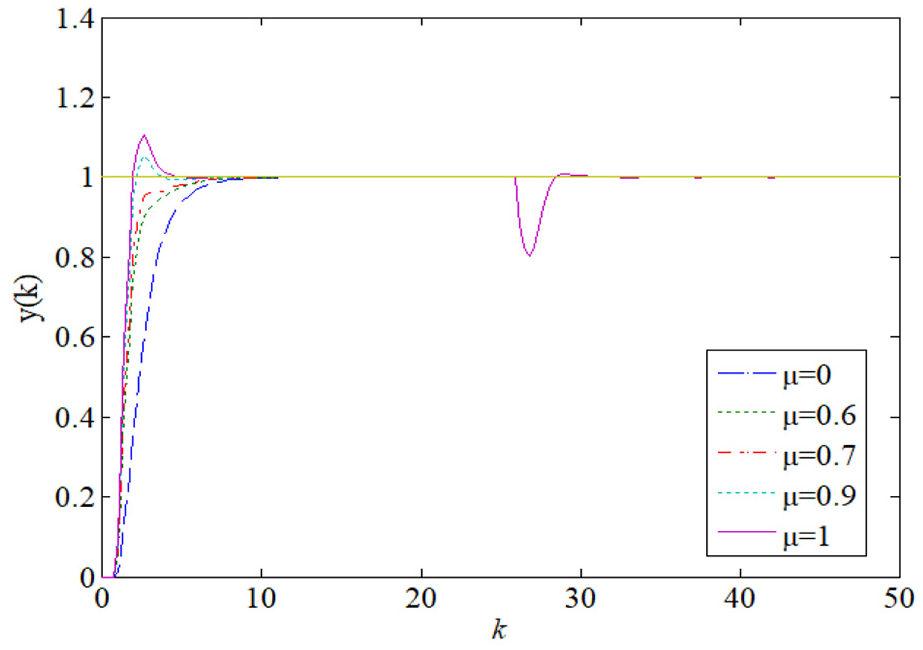
Responses under different values of
It can be easily seen that the ensemble set-point tracking performance is better when
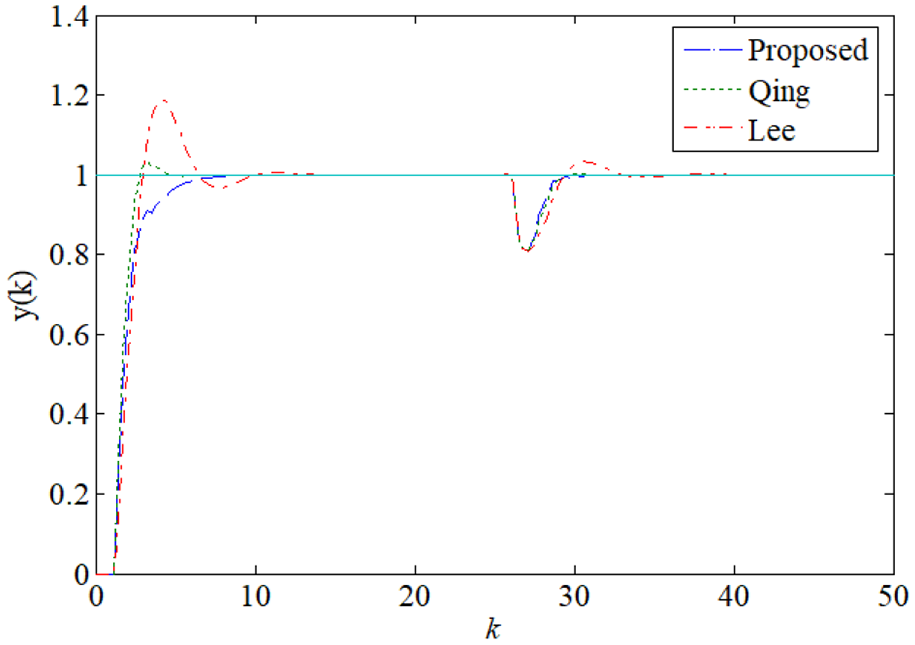
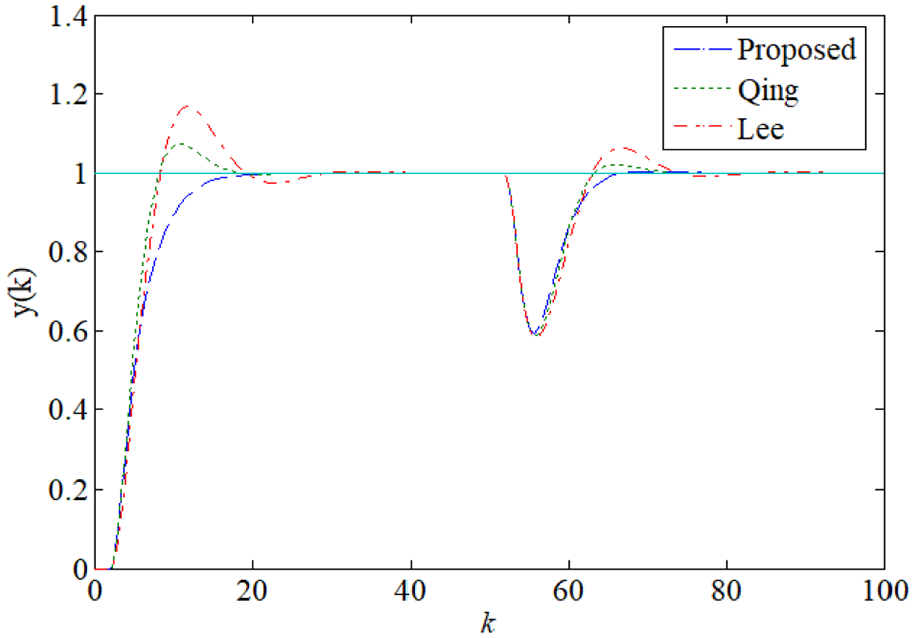
Here, we introduce the approaches in Lee et al. and Qing et al. to evaluate the effectiveness of the proposed strategy. For a fair comparison, the same maximum sensitivity is chosen for all methods. In order to test the disturbance rejection ability for these approaches, the disturbance with amplitude of −0.2 is added. Figure 6 shows the corresponding responses for the three methods under no model/plant mismatch. We can easily see that the responses of the proposed scheme show good set-point tracking performance with small overshoot and oscillations. At the same time, the recovery ability under disturbance is also superior. From an overall perspective, the ensemble control performance of the developed scheme is the best.
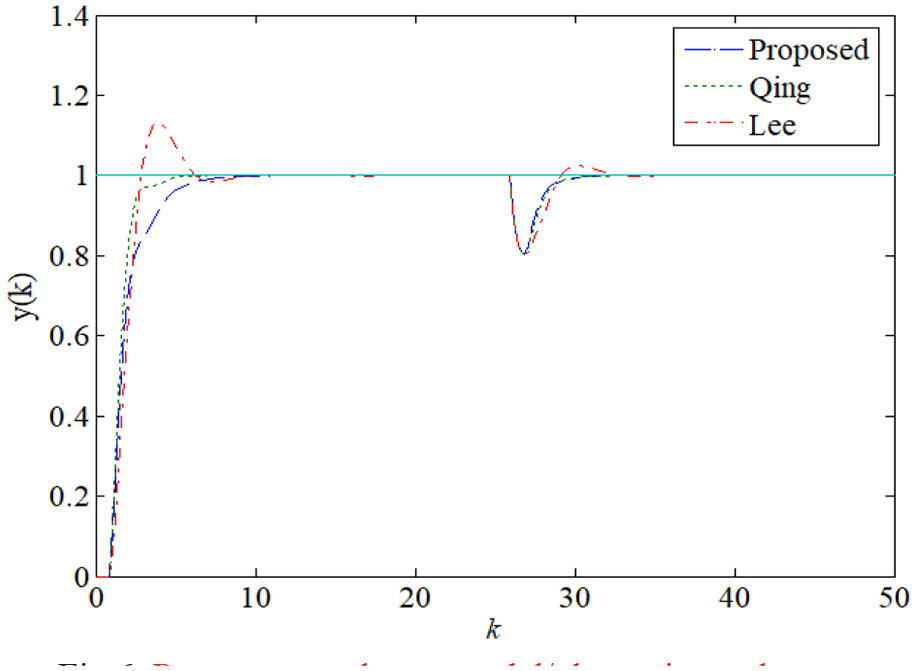
Responses under no model/plant mismatch.
In order to test the validity of these approaches further, here three model/plant mismatched cases are generated through the Monte Carlo method. Here, the maximum degree of mismatch is chosen as ±20%, and the three cases are as follows:
Case 1:
Case 2:
Case 3:
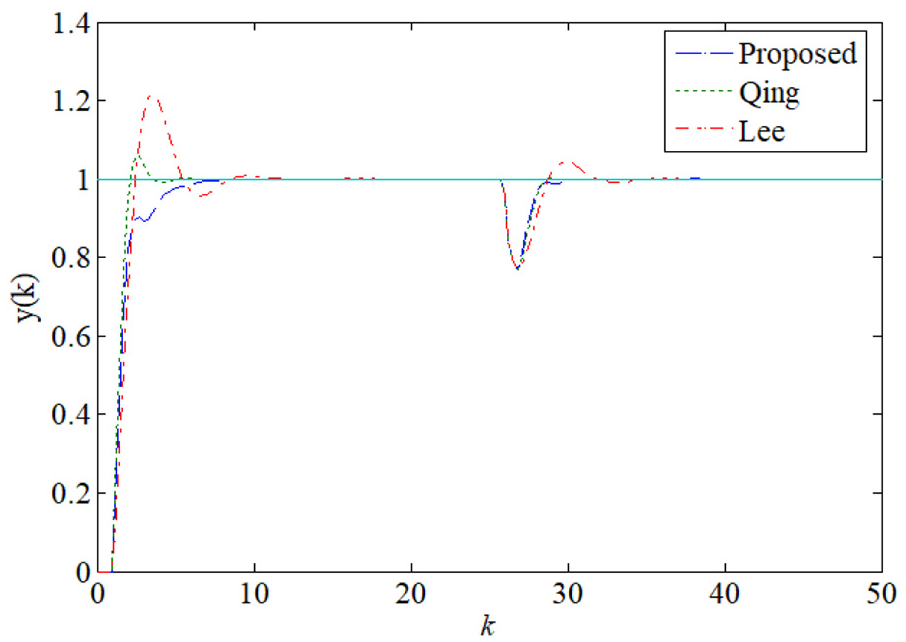
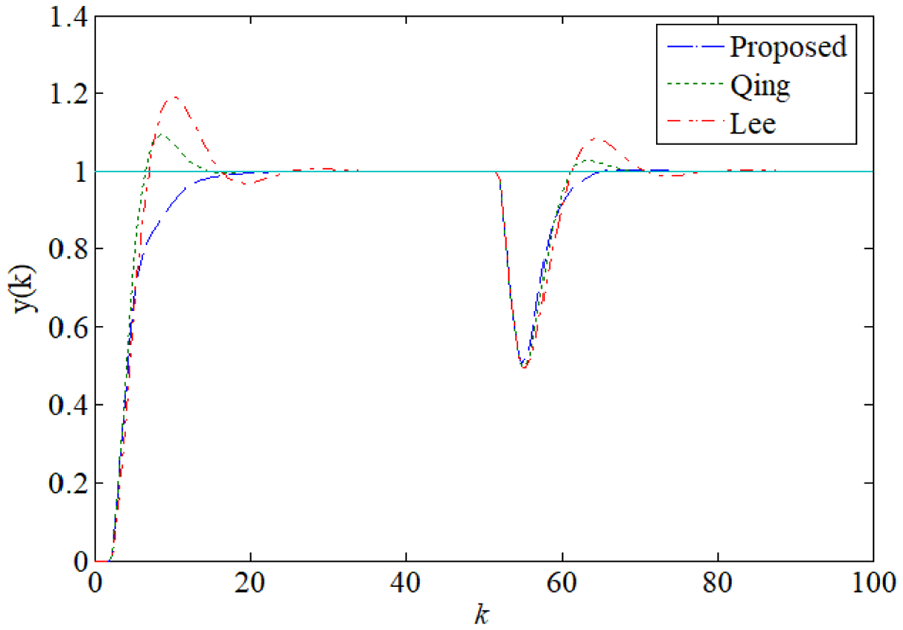
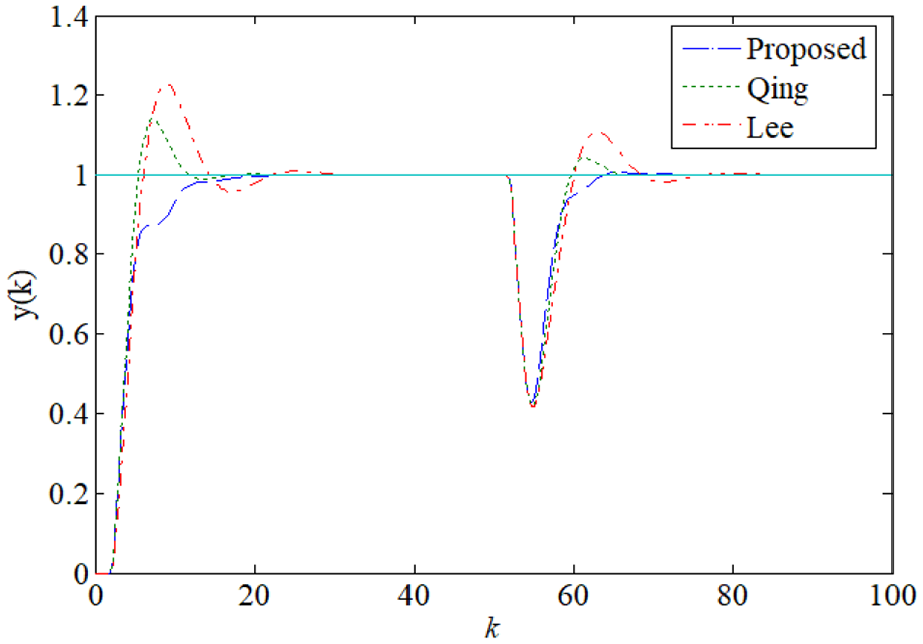
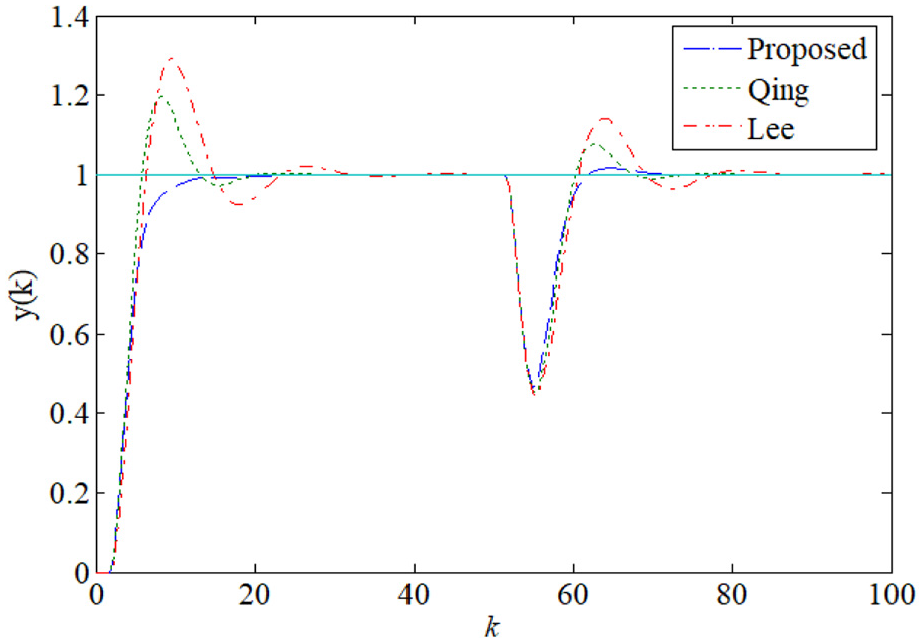
Figures 7–9 show the relevant responses for all the schemes under cases 1–3. In these figures, it is obvious that the set-point tracking performance and disturbance rejection characteristics are the best in the responses of the presented strategy. As to the other two methods, bigger overshoot and oscillations are shown in their responses. In a word, the proposed scheme provides improved ensemble control performance.
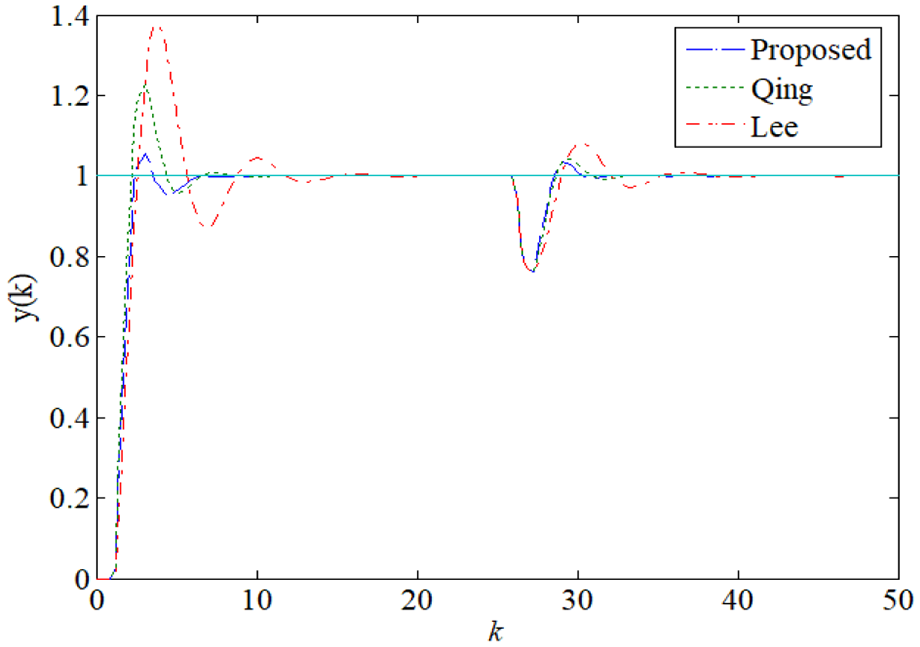
Responses for both methods under case 1.
Responses for all approaches under case 2.
Responses for both schemes under case 3.
Example 2
Consider the following SOPTD process in Wang et al. 12

Here,
Responses under model/plant match.
Similarly, three model/plant mismatched cases are produced via the Monte Carlo method to evaluate the validity of the proposed method further. Here, the maximum degree of mismatch is also ±20%, and the three cases are as follows:
Case 4:
Case 5:
Case 6:
The relevant responses for these approaches under cases 4–6 are displayed in Figures 11–13. In all cases, the presented strategy provides the smoothest responses with the smallest overshoot and oscillations. For the other two methods, their responses are with bigger overshoots and more drastic oscillations. In a word, modified ensemble control performance is obtained for the proposed control strategy.
Responses for both strategies under case 4.
Responses for all schemes under case 5.
Responses for all methods under case 6.
Conclusion
In this paper, an improved design method of 2-DOF-IMC-PID controller is presented for stable process with time-delay. In the new design approach, set-point tracking performance and disturbance rejection characteristics are expected simultaneously by adjusting different controllers separately, and the proposed controller is designed for the FOPTD process and the SOPTD process, respectively. For the control of the FOPTD process, the Maclaurin expansion sequence and the PID controller approximation method are employed for the inner loop feedback controller, and the set-point tracking controller can be further tuned to achieve better tracking performance. In the design for the SOPTD process, the PID controller connected in series with an advanced-lag filter is utilized for the inner loop controller to enhance disturbance rejection characteristics. Finally, simulations on the FOPTD process and the SOPTD process demonstrate the validity of the proposed strategy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the Science and Technology Research Project of Zhejiang (2018R52029).