
Abstract
This article proposes an improved two-degree-of-freedom Smith predictive control method for typical industrial control systems. Smith predictive control is a classic control strategy designed for systems with pure lag. As an extension of Smith predictive control, internal model control can solve the time-delay problem effectively and make the controller design simple. Based on the two control algorithms, an enhanced control method with modified control structure is developed in this paper. In the design scheme, the set-point tracking and the disturbance rejection characteristics are decoupled, such that the set-point tracking and disturbance rejection controllers can be designed independently to achieve better control performance. The obtained control strategy possesses simple and convenient parameter tuning procedures. The validity of the proposed scheme is verified through theoretical analysis and simulation comparison with other control methods, and the results indicate that the proposed strategy shows better performance on set-point tracking and disturbance rejection.
Introduction
Due to the problem of time-delay, the control in actual chemical processes may be difficult. In the past decades, many scholars have proposed a collection of control methods for processes with time-delay.1–3 As to the regulation of time-delay systems, Smith predictive compensation method is an effective algorithm. Using the predictor, the dynamic characteristics are compensated, so that the characteristic equation of the transfer function under closed-loop condition does not include pure-time-delay links. Furthermore, the influence of time-delay on system stability can be eliminated. However, conventional Smith predictor control has two disadvantages, poor disturbance rejection and robustness, which promotes the necessity of development of new control strategies.4–6 It is known that the precision of the compensation model affects the system performance greatly. Meanwhile, the system performance may be deteriorated or even unstable under the varying plant parameters, which limits the relevant application in the actual process to some extent. The literature 7 proposed an improved Smith predictor and a simple but effective approach on controller design for time-delay processes, but it could not deal with unstable processes. To stabilize the unstable process with time-delay, a predictive control was developed, which consists of a predictor and a controller. 8 In Marquez et al. 4 and Mukherjee and Ghose, 9 a novel proportional–integral (PI) controller combined with Smith predictor was presented as the main controller. When the time-delay is moderate, Smith predictor can enhance the performance of the proportional–integral–derivative (PID) controller to some extent. However, it may be unavailable for large time-delays. Therefore, a predictive structure was included in the design to achieve acceptable robustness. 10 For PI controllers, most of predictors’ benefits are small or negligible, which is irrelevant with time-delay. The combination of Smith predictor and PID controller can deal with the delay in stable system, however, the robustness of the controlled system may not be guaranteed when a uncertain object model is used. The literature 11 solved this problem directly by combining the determined PID controller with Smith predictor, where the application of this strategy could let the closed-loop system equip with robustness. In Padhan and Majhi, 12 a modified Smith predictive control strategy was studied to control stable, integral and unstable processes with time-delay, where the controller of set-point tracking was developed by H2 optimal control method and also a PID controller was designed using an optimal internal model control (IMC) filter to obtain better performance of disturbance rejection. Based on the analysis of the drawbacks of traditional Smith predictor, a new Smith predictor with dual-controller structure was investigated in references.13–16 In Jiang et al., 17 an adaptive Smith predictive control algorithm was addressed. The relevant parameters were identified online by the method of gradient correction and then a Smith prediction controller was designed, and the final control effect was superior with improved quality control and stronger robustness. An enhanced control strategy design of Smith predictive control was put forward for the system with time-delay and a controller combining with fuzzy neural network was designed to control the plant in the literature. 18 In Hao et al., 19 Smith predictor was utilized to compensate for the system under fuzzy adaptive control.
With the maturity of PID control technology and Smith predictive control technology, they have been widely applied in practical life and production.20–22 However, the conventional Smith predictor control is a control method with one-degree-of-freedom where only a group of control parameters can be set, hence set-point tracking and disturbance rejection may not be satisfied simultaneously. Based on such backgrounds, many research works have been contributed in recent years. A novel predictor containing two controllers was put forward in the literature, 14 which mainly aims at promoting the weak stability of the traditional Smith predictor. The proposed scheme has the structure of two degrees of freedom, thus the set-point response and the disturbance response can be separated. Then, the controller designs of set-point tracking and disturbance rejection can be proceeded, respectively. Meanwhile, the two controller designs are both adapted with the PID structure where its parameters can be tuned separately, so that the corresponding response is prone to be optimal. In Zhang et al., 23 an enhanced control method was developed on the basis of two-degree-of-freedom (2-DOF) Smith predictive controller, which takes advantage of existing traditional time-delay compensation predictions and decouples the response of set-point tracking from the response of disturbance rejection. A method of 2-DOF control was studied by combining Smith predictive control with internal model control, and a controller with good performance on set-point tracking was gained. 24 The novel Smith predictive control addressed in Majhi and Atherton 7 and Kaya 25 was equivalent to internal model control with improved structure, and a three-stage design method was then presented for the structure. The robust performance index and curve fitting method were applied. In Liu et al. 26 and Owens et al., 27 a multivariable Smith prediction method was proposed to improve the control ability of servo and regulation performance. Nevertheless, these methods are complex, because the design of multiple controller parameters are need to be considered. Meanwhile, the desired control with good ensemble control performance may not be obtained. Besides, there are also many other representative results.28–31
To solve the above problems, a design of modified 2-DOF Smith predictive control and its corresponding parameter tuning method are put forward in this paper. On the basis of the Smith predictive control, the control structure of this approach is simple, and there are only two parameters that need to be adjusted. At the same time, the corresponding tuning approach is also targeted and simple. By utilizing the developed approach, the balance on the performance of set-point tracking and disturbance rejection is anticipated, because there are two relevant controllers that can be regulated separately. To verify the validity of the presented method, case studies on processes with first-order plus time-delay (FOPTD) model and second-order plus time-delay (SOPTD), model respectively. The results imply that good performance on set-point tracking and interference suppression can be achieved simultaneously.
The article is formulated as follows. In section “Smith predictive control structure,” a brief introduction to the structure of traditional Smith predictive control is presented. The design of the improved 2-DOF Smith predictive control is discussed in section “Improved 2-DOF Smith predictive control algorithm.” In section “Tuning method for stable processes,” the adjustments of the controllers for FOPTD and SOPTD processes are addressed, and the advantages of the proposed method are illustrated by simulation and comparison in section “Simulation.” Finally, the conclusion is given in section “Conclusion.”
Smith predictive control structure
The structure of conventional Smith predictive control is shown in Figure 1. Here,
Block diagram of Smith predictive control.
The dashed part of the figure is regarded as a controller which takes the following form

From Figure 1, the transfer function between the system output y and the set-point r under closed-loop condition is derived as
Then, the closed-loop transfer function between the output y of the system and the disturbance d is
If the model is precise, that is,

It can be seen from formulas (4) and (5) that the time-delay term in the process model does not appear in the characteristic equation of the closed-loop transfer function, and this will greatly reduce the design complexity of controller
Improved 2-DOF Smith predictive control algorithm
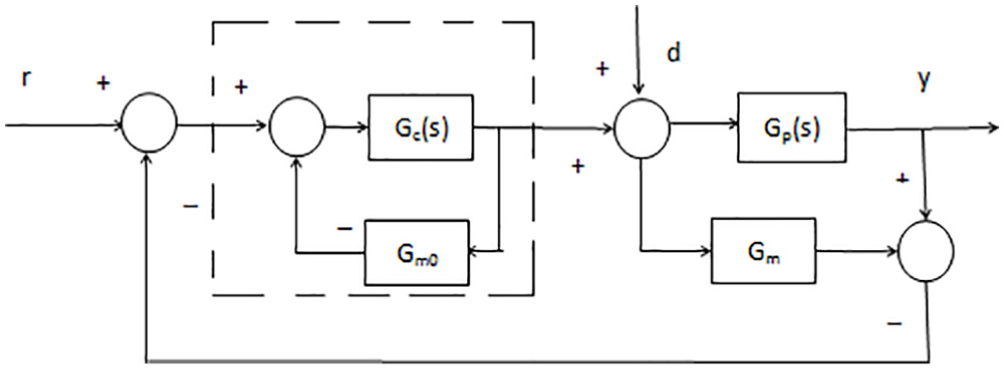
To solve the problem that the traditional Smith control algorithm cannot take into account the two performance indexes simultaneously, a 2-DOF Smith controller with improved control structure is presented as shown in Figure 2.
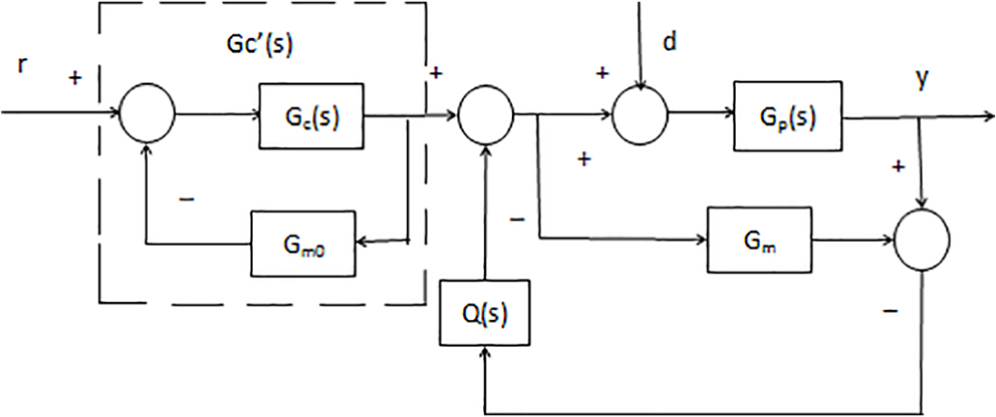
2-DOF Smith controller structure.
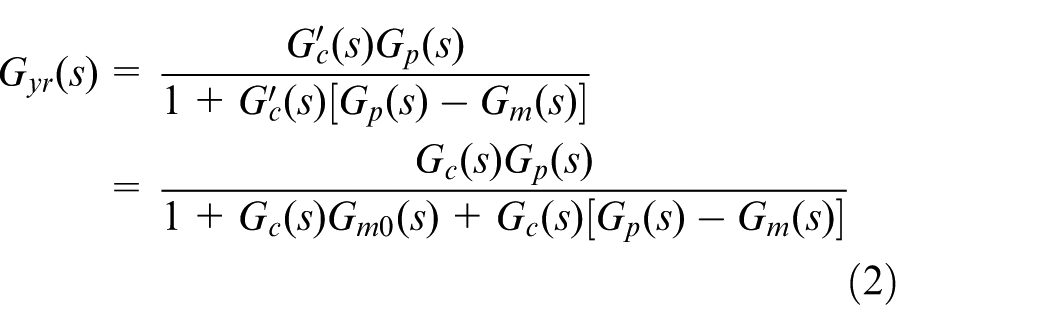
The transfer function between the system output y and the set-point r under closed-loop condition can be derived from Figure 2

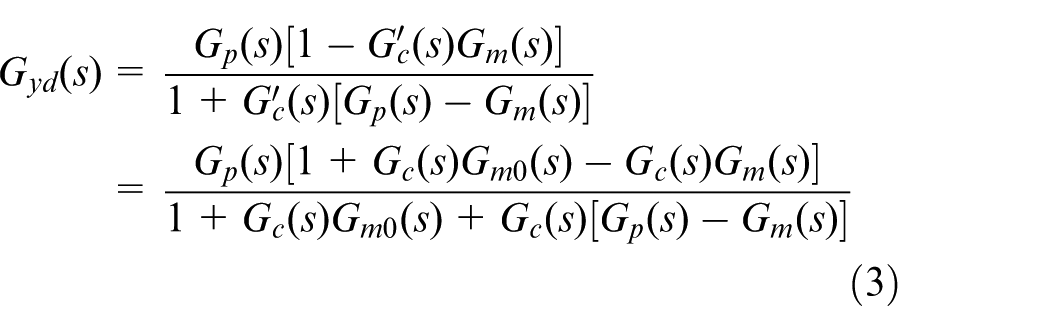
Meanwhile, the transfer function between the system output y and the disturbance d under closed-loop condition is addressed as

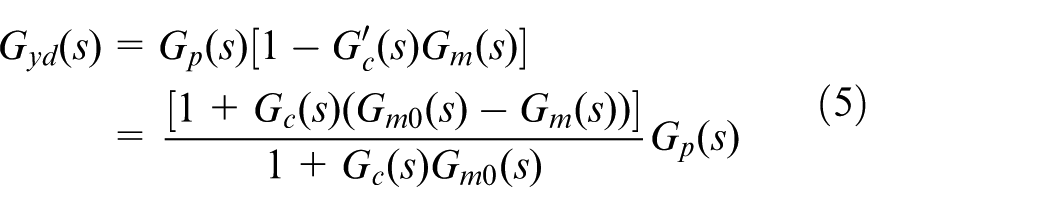
We can acquire the following formulas if the model is precise, that is,


From formulas (8) and (9), we can know that
Tuning method for stable processes
FOPTD
The FOPTD model is representative in industrial process, which can be described as follows

where K, T,
It is known by equations (8) and (9) that controller
For the first-order control system, a conventional PI controller is chosen.

Then, we will consider the closed-loop response of the desired FOPTD model, and the relevant controller will be derived by comparing the desired transfer function with a standard PI controller transfer function.
Assume the expected closed-loop transfer function

where
Furthermore, we can address the controller that needs to be designed as

From the first-order process model,

According to equation (13), it can be easily known that the adjustment of the controller
Next, we will design the disturbance rejection controller
The process model

where
Select the controller

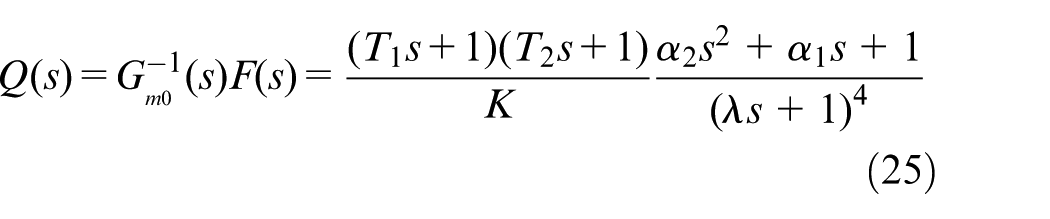
To make the internal model controller suitable and achievable, an internal model control low pass filter with the following form is added and employed to stabilize the controller.

where

where
For first-order process objects, the following filter form is selected

Then, the controller

where

SOPTD
Consider the following second-order time-delay process model

Then, a conventional PID controller which has the following form is chosen

Supposing that the expected closed-loop transfer function is identical with equation (11), then the controller

The parameters in the controller can be easily obtained as follows

Similarly,
Then, we will design the controller

Then, the controller
where
Simulation
For the sake of verifying the effectiveness of the proposed method, a FOPTD process and a SOPTD process are introduced respectively. Meanwhile, the recently proposed methods are also employed as the comparison.
The output response data of the controlled object are obtained by giving a step input signal to the control system. Then, the obtained data are further processed and fitted into a step response curve. Furthermore, the model is established by the two-point modeling method, and the FOPTD process model is

In section “Tuning method for stable processes”, the controller design for a first-order process with time-delay is discussed, and the 2-DOF Smith predictive control approach proposed by Zhang et al.
32
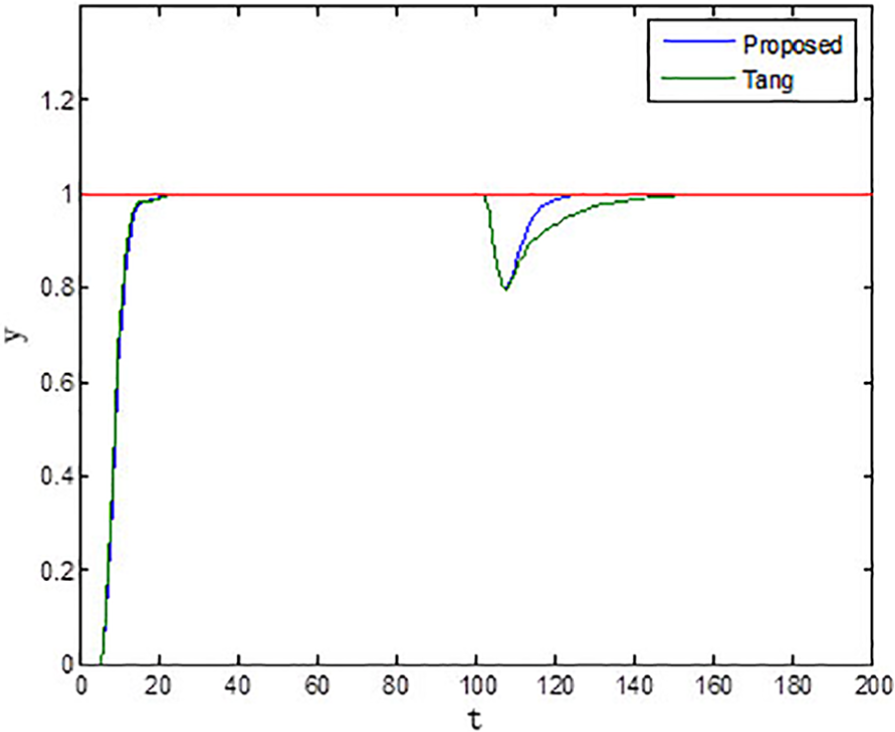
is introduced to evaluate the validity of the proposed method. The set-point for both schemes is chosen as 1, and the disturbance input signal with negative amplitude of 0.1 is added when t = 60 s. To verify the effectiveness of the presented strategy further, the set-point tracking performances are tuned to be similar for both methods to compare the ability in disturbance rejection. Considering
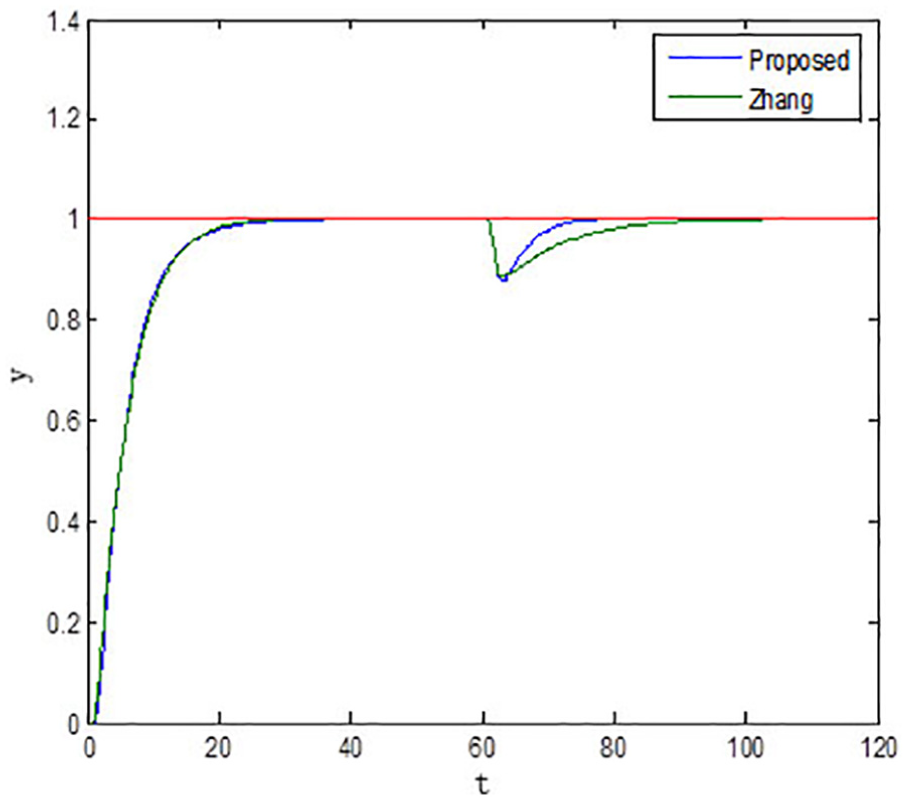
Responses of no model mismatch for Example 1.
Model/plant mismatches is common in practice. Considering that the fundamental reason why Smith’s estimation method cannot be applied in practical engineering is that its pure lag parameter is very sensitive than the amplification factor or the capacity lag time, hence only the case where the mismatched amplitude of the process pure lag time is 20% is considered, and Figure 4 displays the relevant output responses.
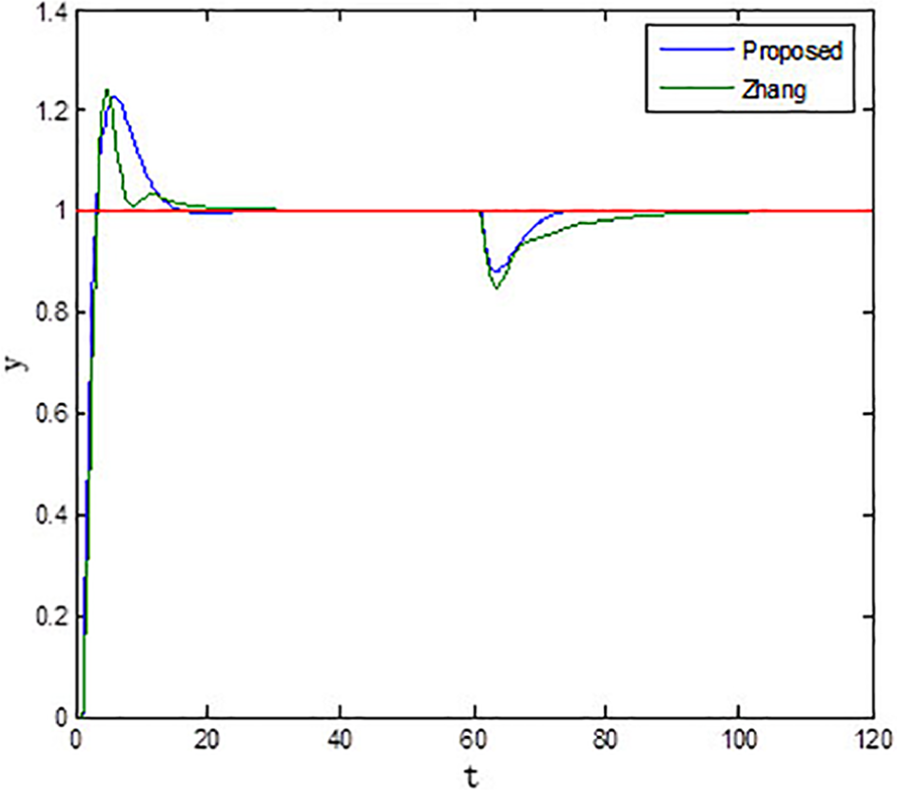
Responses of model/plant mismatch for Example 1.
From Figure 4, it can be easily found that the proposed method and Zhang’s method show similar tracking speed under the case of model/plant mismatch, and bigger overshoot occurs for Zhang’s scheme. As to the aspect of disturbance rejection, the proposed approach is superior.

Here, the improved 2-DOF Smith method developed by Wei et al.
14
is introduced to test the effectiveness of the proposed approach. Here, the set-point for two methods is also selected as one. The negative interference input signal with magnitude of 0.2 is added when t = 100 s. Here, the set-point tracking performance of two approaches are also regulated to be similar to compare the capacity in disturbance rejection. Select
Responses under perfect model for Example 2.
Considering that the perturbation of the time-delay is 20%, then the relevant output responses are displayed in Figure 6.
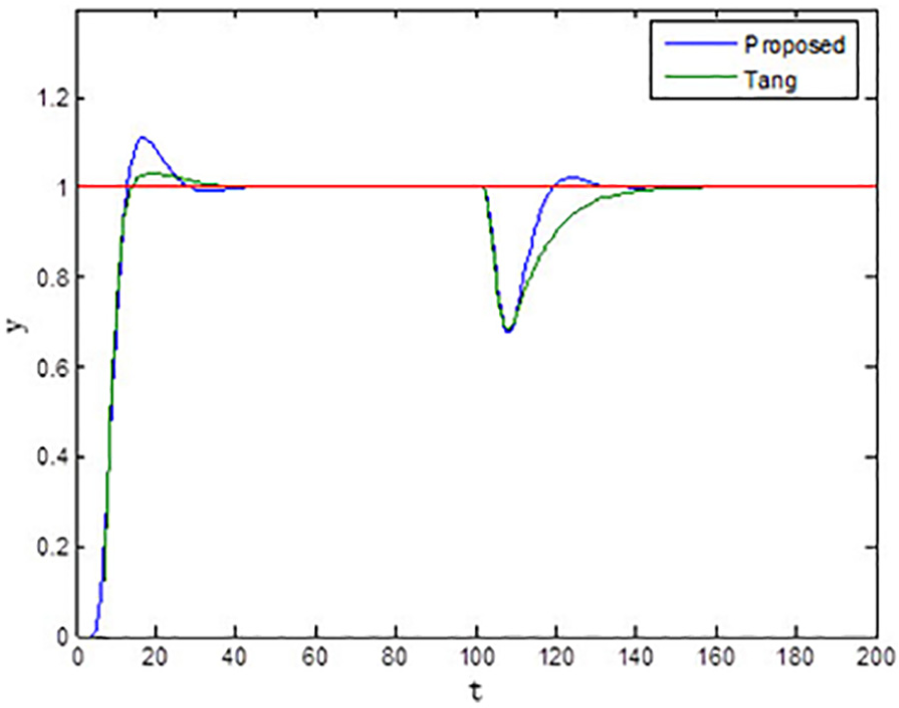
Responses under model/plant mismatch for Example 2.
From an overall perspective, the proposed approach can achieve good characteristics on set-point tracking and disturbance rejection simultaneously, and it provides improved ensemble control performance.
Conclusion
A modified 2-DOF control algorithm in which Smith predictive control and the internal model control are reasonably combined is developed for processes with time-delay in this article. In the improved structure, two controllers are designed for set-point tracking and disturbance rejection characteristics of the system separately. Tests on FOPTD and SOPTD processes are carried out to verify the validity of the presented approach, and results prove the superiority the proposed method to some extent. However, the ensemble ability of the developed strategy also needs to be improved, which is a problem that needs to be studied in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.