
Abstract
Concerning first-order unstable processes with time delays that are typical in chemical processes, a modified 2-degree-of-freedom proportional–integral–derivative control method is put forward. The system presents a two-loop structure: inner loop and outer loop. The inner loop is in a classical feedback control structure with a proportional controller intended for implementing stable control of the unstable process; the outer loop is in a 2-degree-of-freedom structure with feedforward control of set points, where the system’s tracking response of set points is separated from its disturbance response. To be specific, the system has a feedforward controller that is designed based on the controlled object models and mainly used for regulating the system’s set point tracking characteristics; besides, it has a feedback controller that is designed on the ground of direct synthesis of disturbance suppression characteristics to improve the system’s disturbance rejection. To verify the effectiveness, the system is put into a theoretical analysis and simulated comparison with other methods. Simulation results show that the system has good set point tracking characteristics and disturbance suppression characteristics.
Keywords
Introduction
Proportional–integral–derivative (PID) controller remains one of the most universal control methods used in current industrial production due to its advantages of a simple control structure, sound robustness, and reliability among others.1–3 However, it is challenging to make effective control in the traditional PID method for unstable processes with time delays. To cope with such unstable processes with time delays, De Paor and O’Malley 4 proposed a Z-N-structure PID controller tuning method; Shafiei and Shenton 5 raised a graphical method by PID controller using D-divide method; and some advanced methods are targeted at common unstable integral processes and first-order processes with time delays,6,7 but such methods do not suffice regarding the control of system performance.
To design a controller for practical industrial control processes, in addition to stable control of the unstable processes, focus should also be given to optimization of system performance indicators, among which set point tracking characteristics and disturbance suppression characteristics dominate. Compared with the traditional PID control, the internal model control (IMC)8–10 works better in terms of control of processes with delays; furthermore, a modified IMC method is proposed in Yang et al. 11 and Tan et al. 12 to handle unstable processes with time delays, where the IMC is designed by Pade approximation. The IMC control structure is kept and the IMC sets parameters in a clear way; however, the IMC only has one adjustable parameter, thus it fails to access set point tracking characteristics and disturbance suppression characteristics at the same time, which is a performance compromise method. 13 To guarantee stable operation and sustainable controlled performance of unstable processes with time delays, the idea of 2-degree-of-freedom PID control is proposed and promoted14–16 and put into practice. In recent years, many scholars have put forward 2-degree-of-freedom-based modified control methods one after another. Limebeer et al. 17 came up with the method of designing a robust 2-degree-of-freedom controller, where the system’s feedback controller and prediction filter are separately designed to make the system have a greater performance in design. Prempain and Bergeon 18 raised a method of designing a 2-degree-of-freedom controller based on Youla parameterization, 19 which suppresses internal disturbance and external disturbance in a multi-variable control system through H-infinity optimization 20 to solve unstructured uncertainty problems. Based on the 1-degree-of-freedom-to-2-degree-of-freedom span, a double 2-degree-of-freedom control method21,22 is also put forward, where four independent controllers are designed for stabilizing the open-loop unstable or integral processes with delay, improving set point response tracking performance and enhancing the system’s disturbance suppression characteristics. In this method, the system’s performance can be well improved, but its 4-controller design structure is too complicated. In contrast, Rico and Camacho23,24 offer a modified 2-degree-of-freedom controller method based on Smith predictor structure, which has a much simpler controller structure. In this method, a Smith prediction filter and a preset controller are designed for predictive compensation of the processes delays 25 and set point tracking response. This method can decouple and tune the system performance in spite of exceptional unstable processes but is dependent on the precision of controlled models in the system. Since the IMC structure bears a great similarity with Smith control, an optimal H2 PID controller 26 is designed in line with the IMC principle for unstable processes with right half plane (RHP) zero poles and time delays, whose PID parameters 27 are accessed by Maclaurin series approximation or stability controller parameters 28 accessed in the Blaschke product method; moreover, the controller’s closed-loop control performance of unstable processes with time delays is enhanced in conjunction with rules for adjustment of maximum sensitivity tuning parameters. In Humaidi and Hasan, 29 2 two-degree-of-freedom control strategy is combined with sliding mode control. Meanwhile, to improve the accuracy of real-time recognition of the permanent magnet synchronous motor model and its control performance over servo drive systems, a fractional-order and generalized predictive control (GPC) 2-degree-of-freedom PI control method is presented in Qiao et al., 30 but it is hardly implemented in practice since fractional control 31 and GPC 32 involve too many setting parameters. In addition, many scholars combine intelligent optimization with PID control33–35 to effectively modify the performance of control systems. However, such control algorithms involve too much calculation and are hardly implemented in practical systems.
Concerning common first-order unstable processes with time delays in chemical production, a modified 2-degree-of-freedom PID control structure is put forward in this paper. This structure comprises three parts: an internal setting controller, a feedforward controller, and a feedback controller. Based on the controlled object models, the feedforward controller can make the entire system have sound set point tracking characteristics while the feedback controller is mainly designed by direct synthesis of disturbance suppression characteristics. In this way, the control system can stabilize unstable processes while acquiring good set point tracking and disturbance suppression. The paper is organized as follows. Section “Problem statement” gives a brief description to typical feedback control and traditional 2-degree-of-freedom control structures. In section “Modified 2-degree-of-freedom control,” the modified 2-degree-of-freedom PID control structure is designed on the basis of unstable processes. Section “Design of controllers” is concerned with the details of design analysis on internal stability controller, feedforward controller, and feedback controller. Section “Simulation” illustrates the superiority of the method through simulation and comparison. This paper ends with a conclusion in section “Conclusion.”
Problem statement
In practical industrial process control, many factors need to be simultaneously considered in terms of control performance to meet the expected control requirement. To this end, 2-degree-of-freedom control is an appropriate design method, where two independent controllers with independent parameters are designed to optimize the system’s disturbance suppression performance and set point tracking performance at the same time. It is different from 1-degree-of-freedom control methods that can only reach a compromise between the two performance indicators and hence fails to yield satisfactory control effects.
Typical feedback control
A typical feedback control structure is shown in Figure 1.
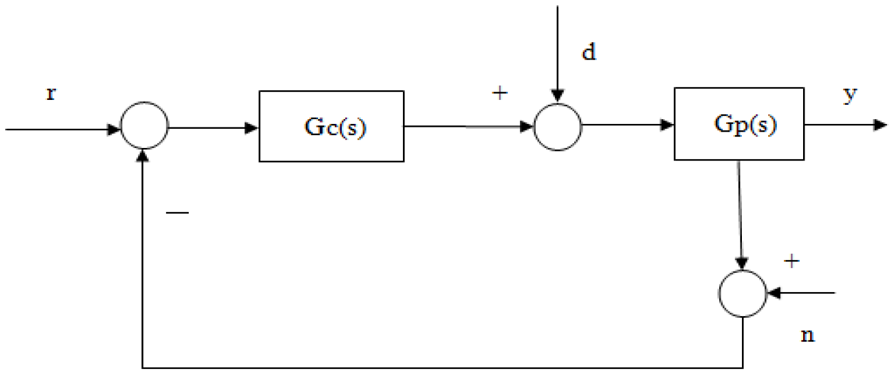
Block diagram of typical feedback control.
In Figure 1, r, d, n, and y represent the set point, disturbance input, noise input, and system output, respectively;
Through Figure 1, the closed-loop transfer function between the system output and set point is

A closed-loop transfer function between the system output and disturbance is

A closed-loop transfer function between the system output and noise input is

Through an analysis on equations (1)–(3), any one closed-loop transfer function can be used to derive the other two functions. Therefore, this system is a 1-degree-of-freedom control system that cannot give a consideration to both set point tracking performance and disturbance suppression performance at the same time.
Traditional 2-degree-of-freedom control
Based on the typical feedback control, a 2-degree-of-freedom control structure is designed as shown in Figure 2.
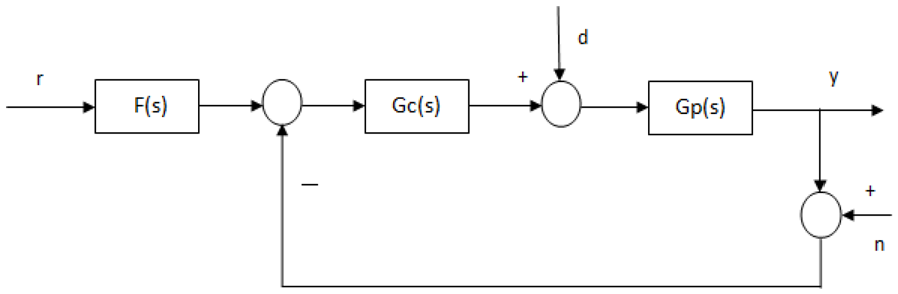
Block diagram of 2-degree-of-freedom control structure.
In Figure 2, F(s) represents the set point filter.
Similarly, such closed-loop transfer functions as



Equations (4)–(6) show that the feedforward transfer function is only related to
Modified 2-degree-of-freedom control
For unstable processes with time delays, the control structure is shown in Figure 3. Here,
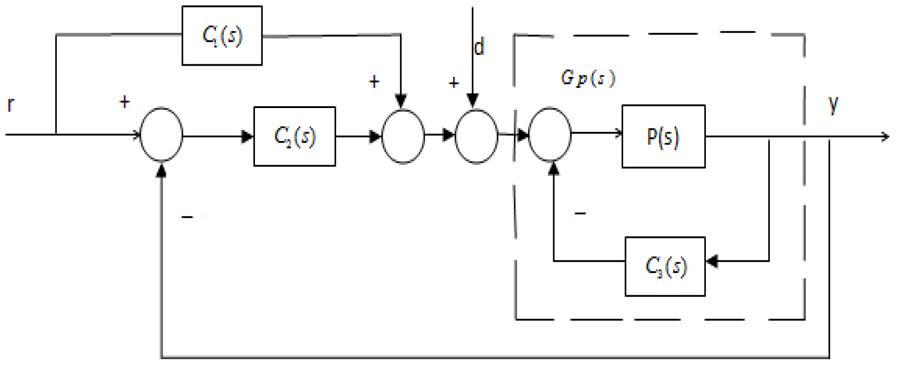
2-Degree-of-freedom control structure for unstable processes.
Through Figure 3, the closed-loop transfer function between the system output and input is
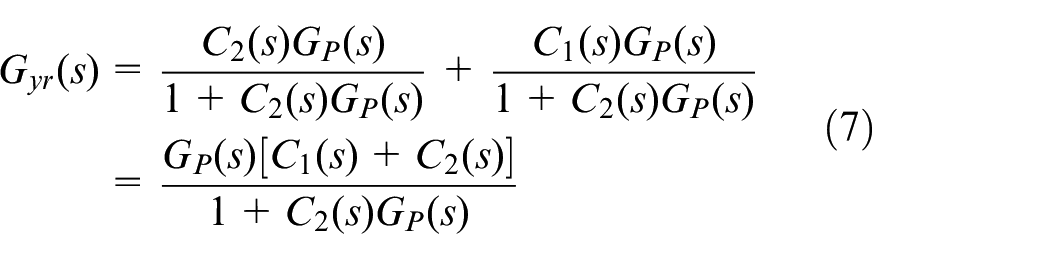
A transfer function between the process output and disturbance is

Equations (7) and (8) indicate that the controller
Design of controllers
Stability controller
To stabilize the controlled processes, the design of a controller
Through Figure 3, the generalized controlled process

Here,
The controlled process
Then, the generalized controlled process is as follows

The time delay item in the denominator of equation (10) is expanded and approximated by Taylor series as follows

Furthermore,

A characteristic equation is extracted from equation (12), where the value range of

Within the range of equation (13), the value of
Feedforward set point tracking controller
The controller

In equation (14),
A low-pass filter is selected to implement the controller
In equation (15),
Feedback disturbance suppression controller
Last but not least, a controller

According to equation (16), where the generalized controlled process or the generalized model is obtained after
It is considered to design the controller

Equations (12) and (17) are substituted into equation (8) to derive
The time delay item of the denominator in equation (18) is approximated by Pade approximation as follows

Equation (19) is simplified and substituted into equation (18) to derive

According to equation (20), the controller

In formula (21),
Through a combination of formulas (20) and (21), the PID controller parameter of the controller

The value of


Simulation
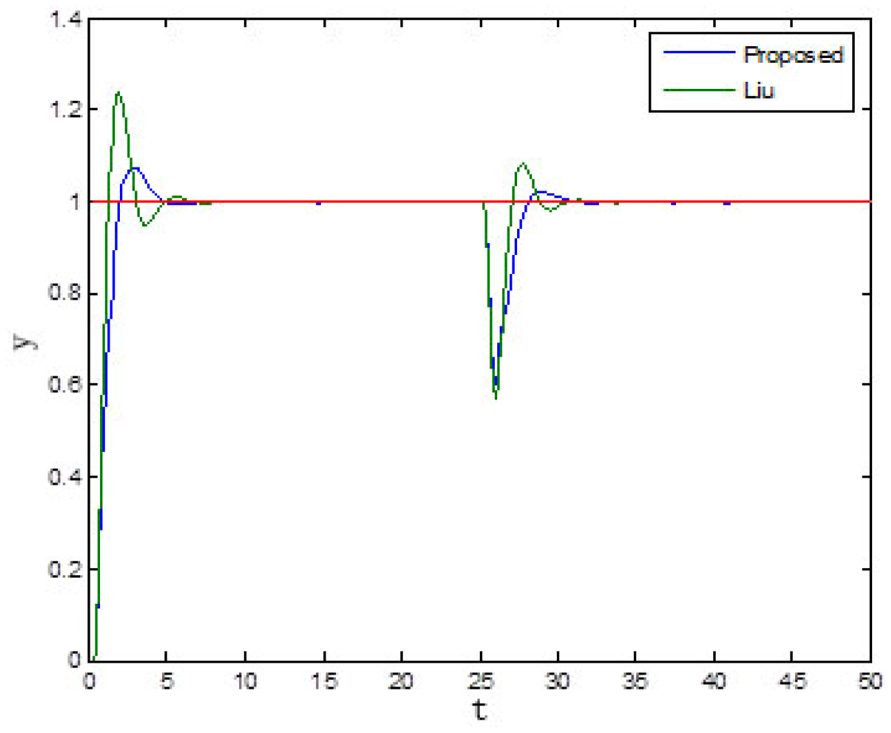
In Liu et al., 36 a first-order unstable process with time delay is considered

Here,

From equations (14) and (15), the form of the controller

Herein it is considered
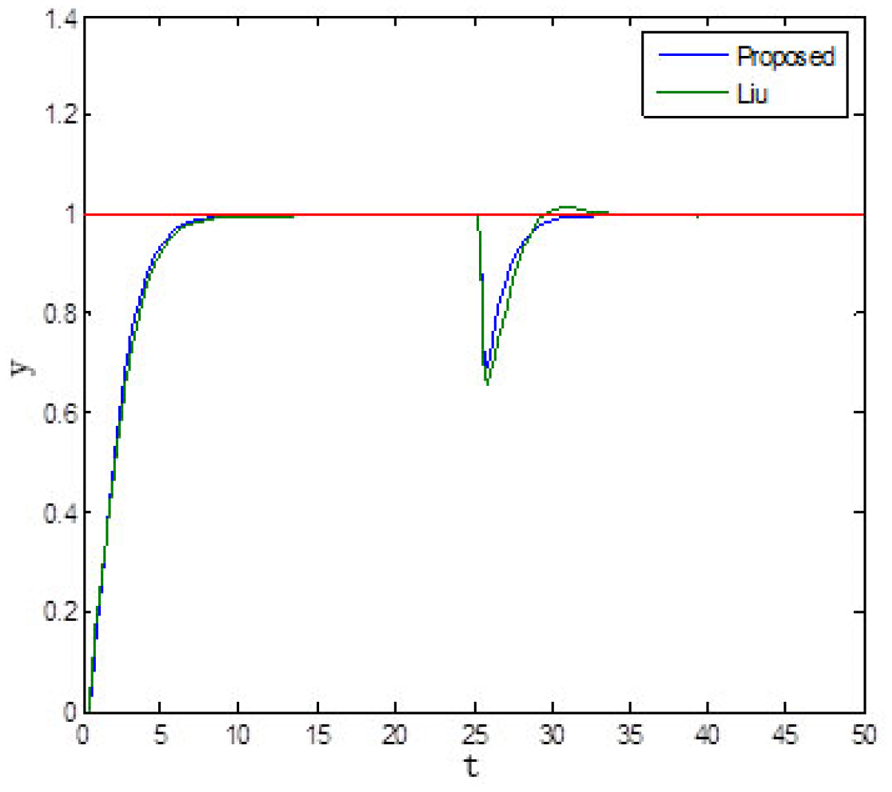
Response to first-order unstable processes with time delays.
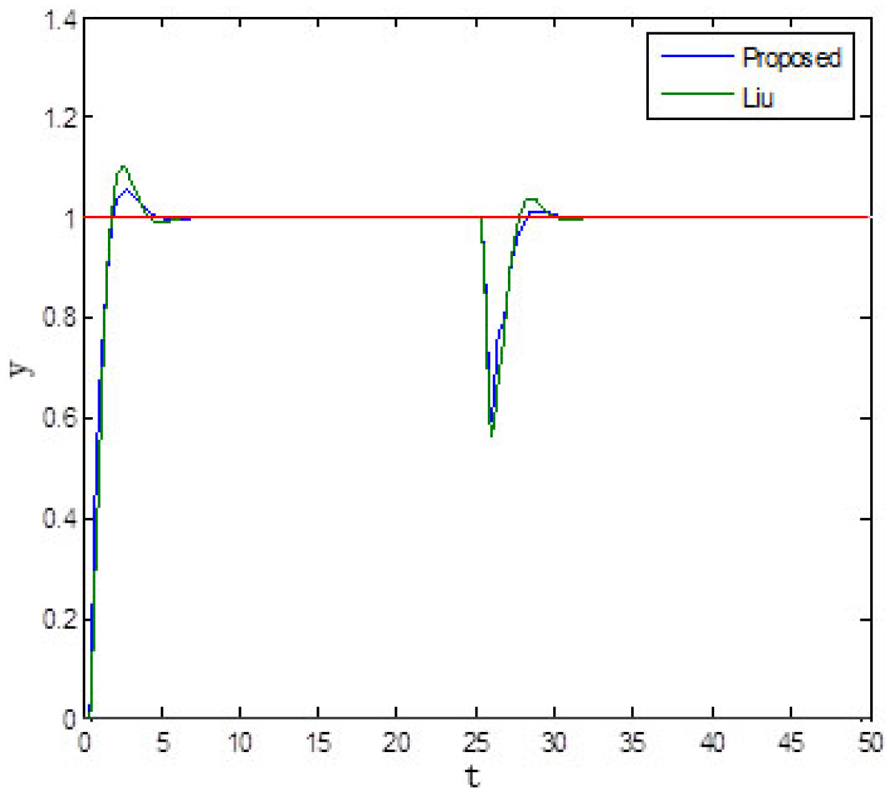
Note that practical processes may not match the models; it is supposed that the maximum mismatch degree of parameters is ±20% to produce three sets of mismatch parameters randomly using the Monte Carlo method:
Set 1: Mismatch process parameters:
Set 2: Mismatch process parameters:
Set 3: Mismatch process parameters:
Figures 5–7 show the responses under model/plant mismatch cases. Through a comparison between the proposed method in this paper and that of the method proposed by Liu et al., 36 it is found that in the event of model/plant mismatch, the method in this paper can ensure that the closed-loop system is stable with good disturbance suppression.
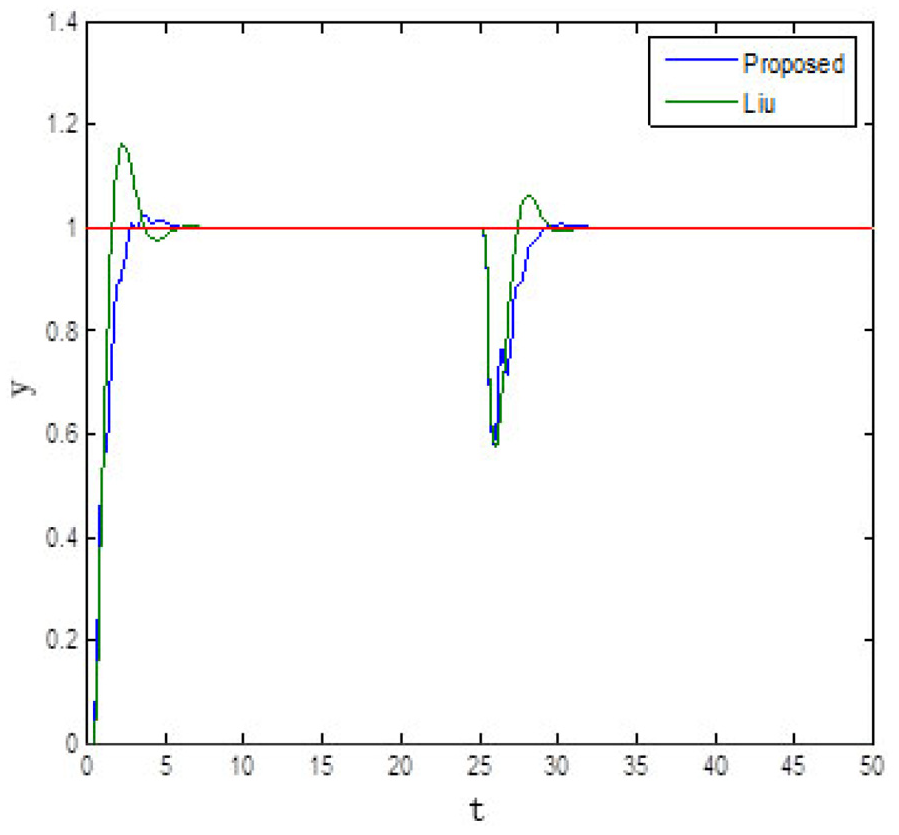
Response of first-order unstable processes with time delays given Set 1 parameter mismatch.
Response of first-order unstable processes with time delays given Set 2 parameter mismatch.
Response of first-order unstable processes with time delays given Set 3 parameter mismatch.
Conclusion
A modified 2-degree-of-freedom PID control structure is proposed in this paper for first-order unstable processes with time delays that are common in chemical engineering. This structure has three parts: an internal setting controller, a feedforward controller, and a feedback controller. Based on the feedforward controller designed, the entire system has sound set point tracking performance. The feedback controller is mainly designed by direct synthesis of disturbance suppression characteristics. This design method can ensure system stability while obtaining good set point tracking and disturbance suppression. It is characterized by a simple control structure and convenience in controller parameter setting.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Science and Technology Research Project of Zhejiang (2018R52029) and the Hong Kong Research Grants Council (16207717).