
Abstract
In this paper, an attempt was made to obtain the aerodynamic performance of a Hex-rotor unmanned aerial vehicle with different rotor spacing. The hover efficiency of the Hex-rotor unmanned aerial vehicle is analyzed by both experimental tests and numerical simulations. First, a series of index to characterize the aerodynamic performance of the Hex-rotor unmanned aerial vehicle are analyzed theoretically, and then both tests and simulations on a Hex-rotor unmanned aerial vehicle with different rotor spacing ratio (i = 0.50, 0.56, 0.63, 0.71, 0.83) were presented in details. For a custom-designed test platform, the thrust, power loading and hover efficiency of the Hex-rotor unmanned aerial vehicle were obtained in this paper. Finally, computational fluid dynamics simulations are performed to obtain the streamline distributions of the flow field, pressure and velocity contour of the Hex-rotor unmanned aerial vehicle. Results show that the aerodynamic performance of the Hex-rotor unmanned aerial vehicle is varied by changing the rotor spacing. Specifically, the smaller rotor spacing may improve the aerodynamic performance of the Hex-rotor unmanned aerial vehicle by increasing the rotor interferences. In the meantime, the effects of mutual interference between the rotors are gradually reduced with the increase of the rotor spacing. Moreover, the uniformity of the streamline distribution, the shape and the symmetry of the vortex are necessary conditions for the Hex-rotor unmanned aerial vehicle to generate a larger thrust. It was also noted that the thrust increased by 5.61% and the overall efficiency increased by about 8.37% at i = 0.63 for the working mode (2200 r/min), which indicated that the rotor spacing ratio at i = 0.63 obtained a best aerodynamic performance.
Introduction
The application of Hex-rotor unmanned aerial vehicle (UAV) is increasing dramatically with heavy loading and flexible rotor arrangement. This kind of multi-rotor UAV is characterized with simple structure, strong load capacity and system reliability.1–4 Unlike most helicopters with single rotor, the interactions between rotors presented the unique aerodynamic environment which is very important to reduce the structure redundant and enhance the system stability. Also, a longer hover time is great potential in the market for human and transportation, inspection, and military with a Hex-rotor UAV.5,6 However, the aerodynamic effect between the rotors was neglected when the most of the research were only focused on control strategies.7,8 Lee et al. studied the control method and the path planning of the Hex-rotor aircraft.9–12 Zhao et al. 13 presented a control system with neural network algorithms. Also, Thomas et al. analyzed the effects of low Reynolds number and aspect ratio on the design and flight performance of aircraft.14,15 Bohorquez 16 used the method of moment theory to analyze the variation of the aerodynamic performance of the rotor with the rotor angle of attack at low Reynolds number. Ramasamy et al. 17 conducted a particle image velocimetry (PIV) flow field test on a self-developed single-rotor aerodynamic test platform, and obtained the wake boundary results and boundary images of a single rotor in a hovering state in a low Reynolds number environment.
Currently, there is fewer research conducted on the structural design of the Hex-rotor UAV by analyzing the aerodynamic arrangement. Therefore, it is necessary to study the aerodynamic characteristics of the Hex-rotor UAV with different rotor spacing to find out the optimal rotor arrangement of the Hex-rotor UAV in hover. Furthermore, the limited Reynolds number environment of UAV imposes severe constraint on the rotor aerodynamic analysis (e.g. increased viscous force and drag force). Therefore, it is also necessary to obtain aerodynamic characteristics related to the hover efficiency of these multi-rotor UAVs due to the insufficiency on the aerodynamic analysis. For optimal tasks involved in this paper, the engineering requirement for a Hex-rotor UAV is to design the propulsion group for maximum thrust/power ratio with better hover efficiency. In the meantime, the structural mass is also assumed to be minimized. Hence, there has to be a suitable trade-off between improved efficiency to provide sufficient thrust with lower power and reduced payload with increased weight.
This paper is structured as follows: the theoretical analysis of the aerodynamic performance and the simulation settings are presented in section “Theoretical analysis.” In section “Experimental analysis,” experimental design and results analysis are discussed in detail. In section “Simulation analysis,” the simulation results are analyzed. Finally, conclusions are obtained in the last section.
Theoretical analysis
As the multi-rotor UAV power system, the aerodynamic performance is evaluated by three indexes: rotor thrust, power loading (PL) and hover efficiency.
Power loading
When the rotors are properly arranged, the system may have more thrust and speed. Hence, PL is proposed as the metric of the rotors which is given by



where
To maximize the PL which means that energy requirements are minimized. This will give the vehicle the best endurance or payload capabilities possible. PL comparisons are not affected by operating conditions or vehicle configurations, being always valid and able to clearly show which rotor is requiring less energy for a given thrust.
Hover efficiency
The hover efficiency is related to the load capacity and hover time of a multi-rotor UAV which is given by figure of merit (FM) 18
where
Basic parameters
By reviewing the studies regarding the influence of different rotor spacing on the aerodynamic performance of the UAV, it is clear that the aerodynamic performance is related to the adjacent rotor spacing

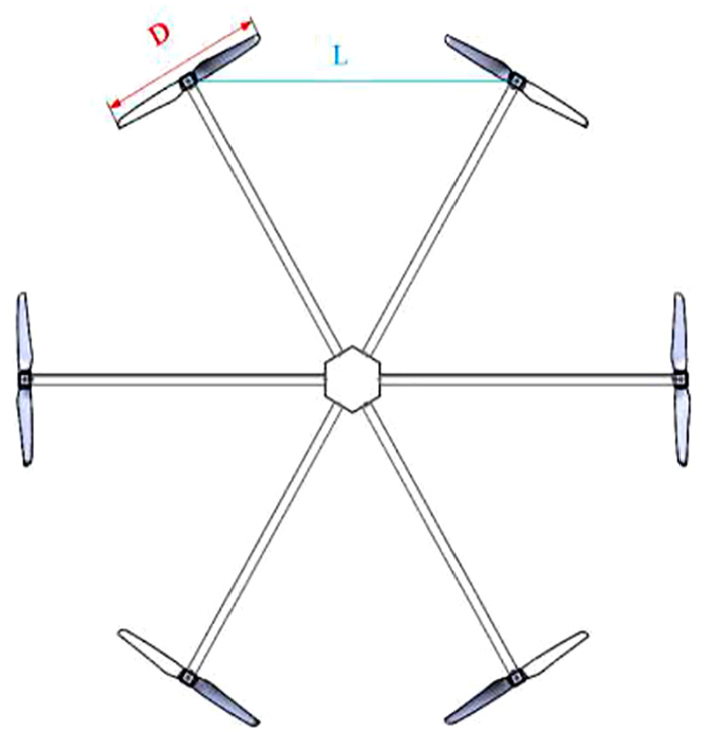
Rotor spacing.
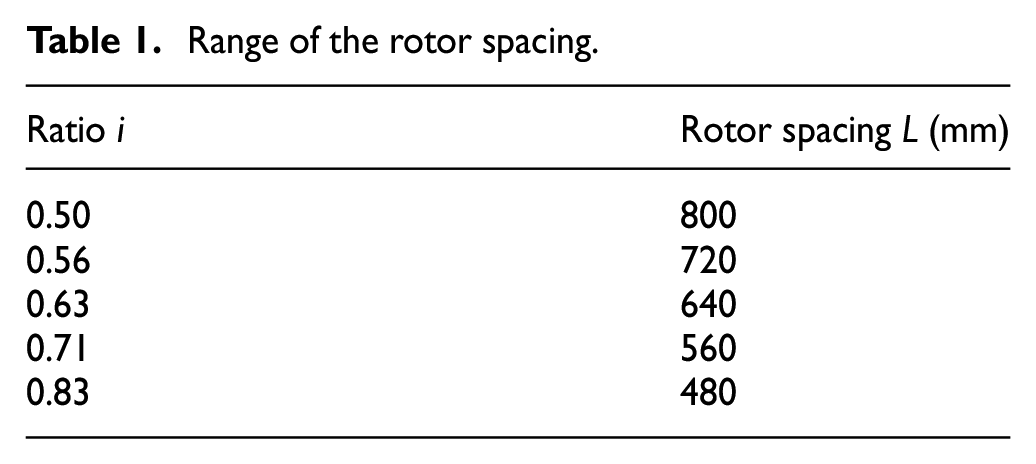
The range of the rotor spacing applied in this paper are showed in Table 1:
Range of the rotor spacing.
Experimental analysis
Experimental setup
Sketch of the test bench is shown in Figure 2.
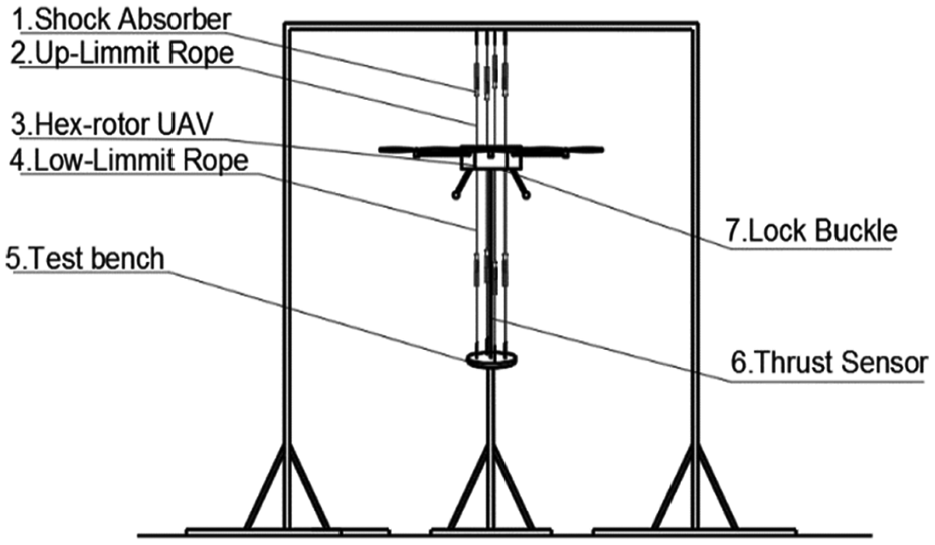
Test bench.
To measure the thrust and power consumption, the Hex-rotor UAV is fixed on the test bench. The height is 1.5 m to avoid any ground effect. The signal process is shown in Figure 3.
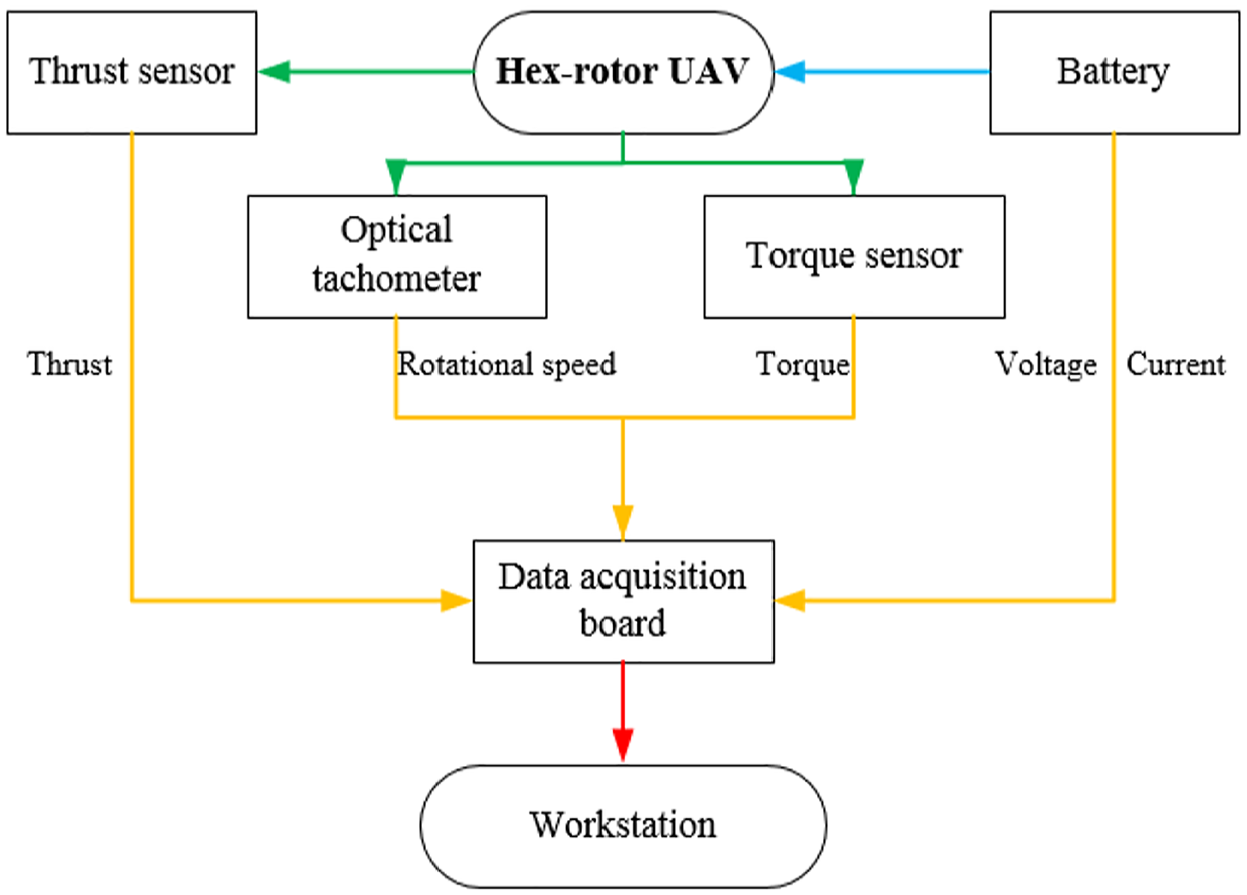
Signal process.
The power system is driven by a high-energy power battery, 19 and the electronic speed controller is applied to perform the attitude control of the aircraft. The motor used in the tests is a permanent magnet brushless DC motor.20,21 The rotor profile is shown in Figure 4.
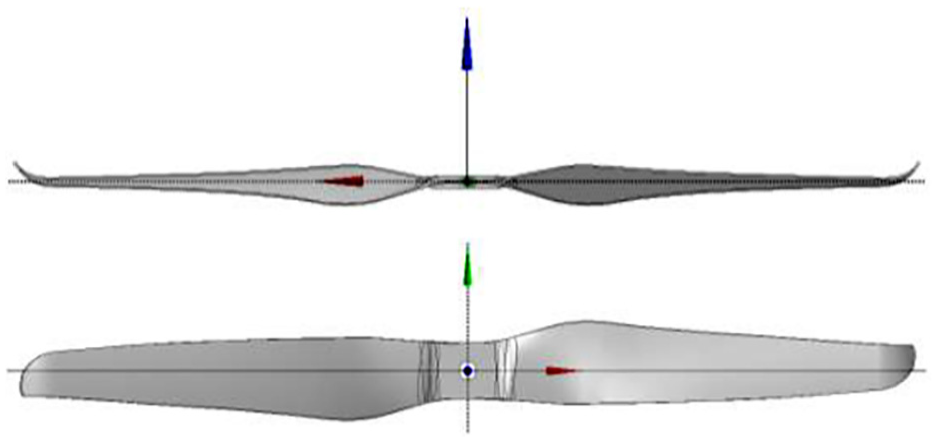
Rotor profile.
The diameter of the rotor is 400 mm with a weight of about 0.015 kg. The rotor has two blades with the speed ranged from 1500 to 2300 r/min (working speed is 2200 r/min).
The main components of the test bench include the following: (1) brushless DC motor (model: MSYS-LRK 195.03); (2) metal-oxide-semiconductor field-effect transistor (MOSFET) speed controller (model: BL-6); (3) an optical tachometer was used to obtain the rotor RPM (model: DT-2234C, accuracy: 6 ± (0.05% + 1d)); (4) the thrust is measured by a thrust sensor mounted on the bracket (model: CZL605, accuracy: 0.02% F.S.), which converts the stretch signal into an electrical signal output. (5) Torque sensor (model: HLT-131, accuracy: 0.5% F.S.) was fixed on the motor to obtain rotor torque. Power consumption is achieved by measuring the current and voltage. According to the Kline–McClintock equations, uncertainty of CT, CP and PL are 1.2%, 1.1% and 1.5%, respectively.
Test results
The thrust variation of the Hex-rotor UAV with different rotor spacing compared with i = 0.83 is shown in Figure 5.
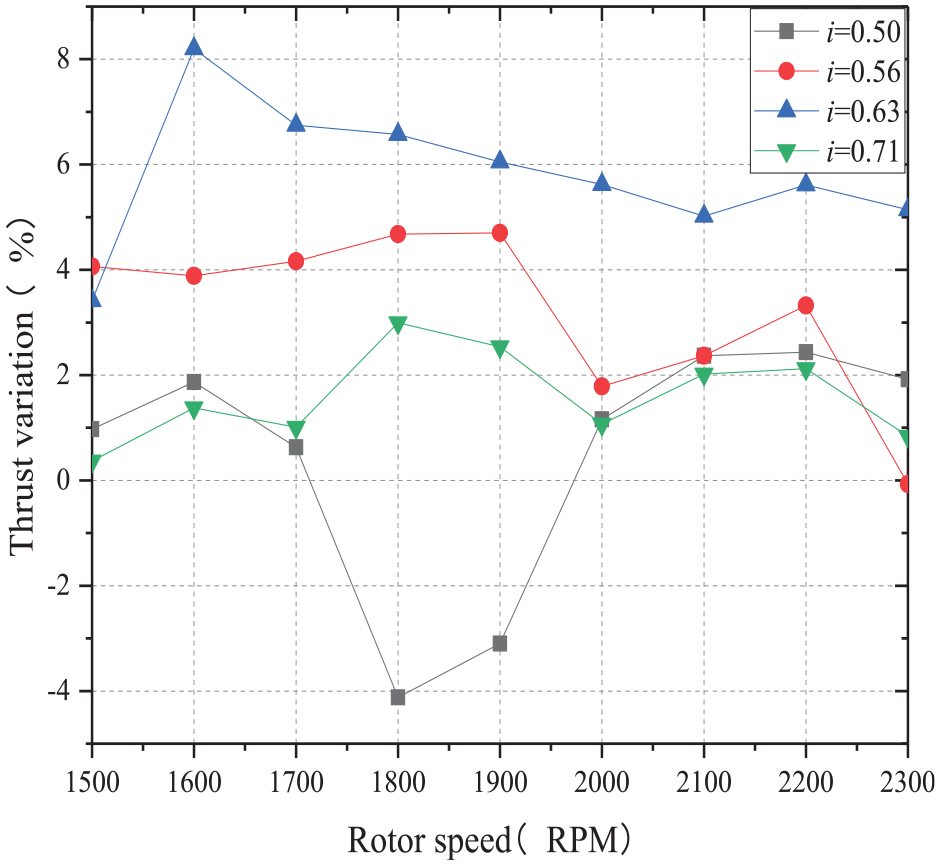
Thrust variation compared with i = 0.83.
As showed in the Figure 5, the thrust gradually reached maximum at the smaller rotor speed, and it increased by 8.25% for i=0.63 at 1600 r/min. Also, for the working mode (2200 r/min), the maximum thrust is obtained at i = 0.63, which is 5.61% higher than the thrust at i = 0.83. It is also interesting to note that the thrust at i = 0.5 and i = 0.83 showed a relatively small thrust variation; the reason for this phenomenon may be caused by the mutual interference between adjacent rotors with a small spacing ratio. The variation of PL as compared with i = 0.83 is shown in Figure 6.
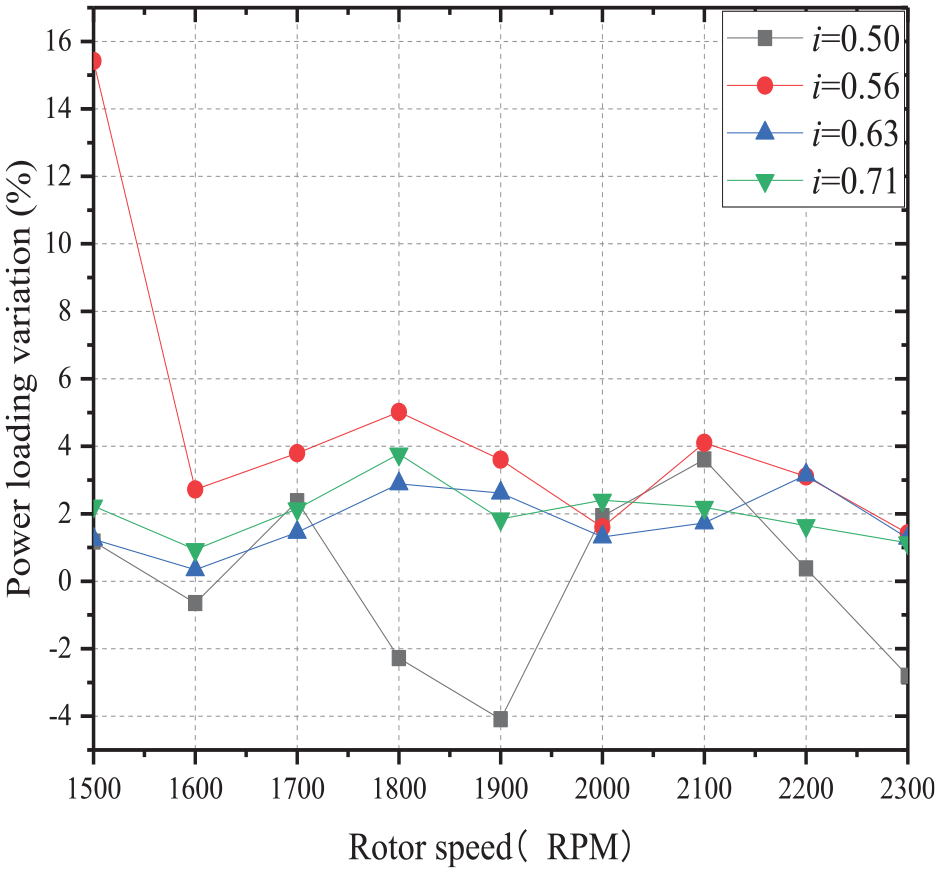
Variation of power loading compared with i = 0.83.
It is clear that the PL variation is relatively small with the range between 0% and 5%, and the PL at i = 0.56 achieved the maximum. Furthermore, PL at i = 0.5 still showed the minimum which may indicate that the stronger interference between the rotors will increase the power consumption. In addition, at the working speed (2200 r/min), the PL at i = 0.63 is 3% higher than that at i = 0.86.
The FM variation to characterize the hover efficiency of the Hex-rotor UAV compared with i = 0.83 is shown in Figure 7.
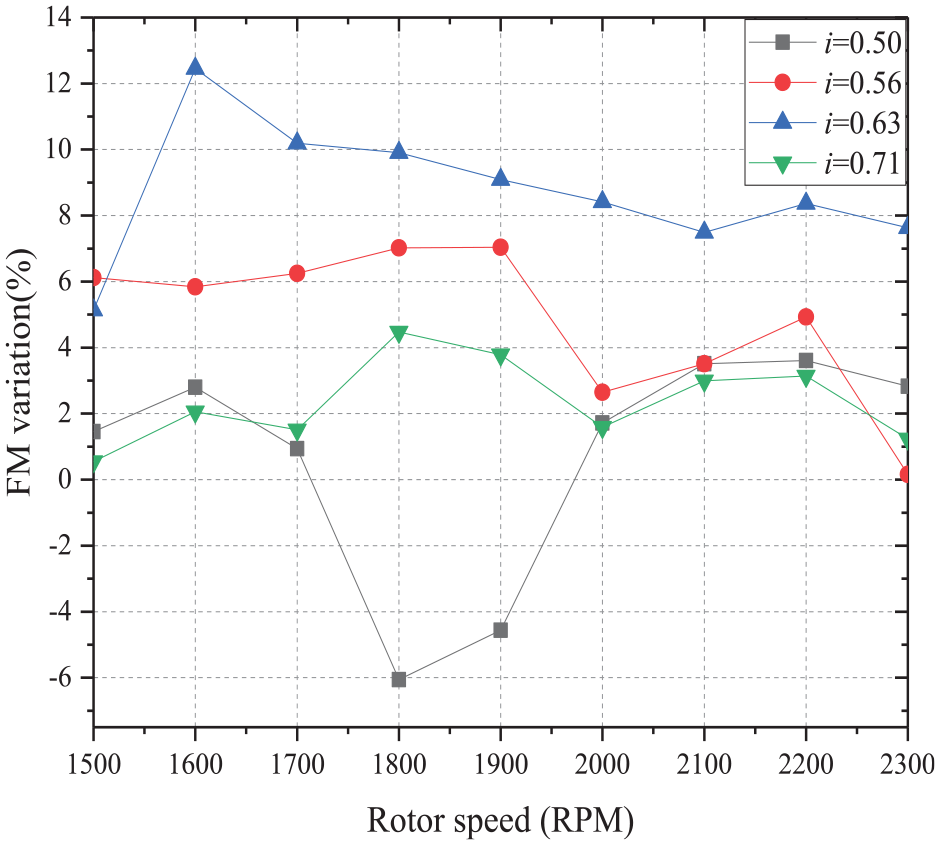
FM variation with the comparison of i = 0.83.
It is clear that the hover efficiency at i = 0.63 achieved the best performance which is 12.45% higher than i = 0.83. Also, the FM at i = 0.5 still showed a lower value especially when the rotor speed is ranged from 1700 to 2000 r/min, which showed that the rotor interference with a small spacing ratio was not suitable to improve the hover efficiency. Figure 8 shows the pressure distribution of the blade.
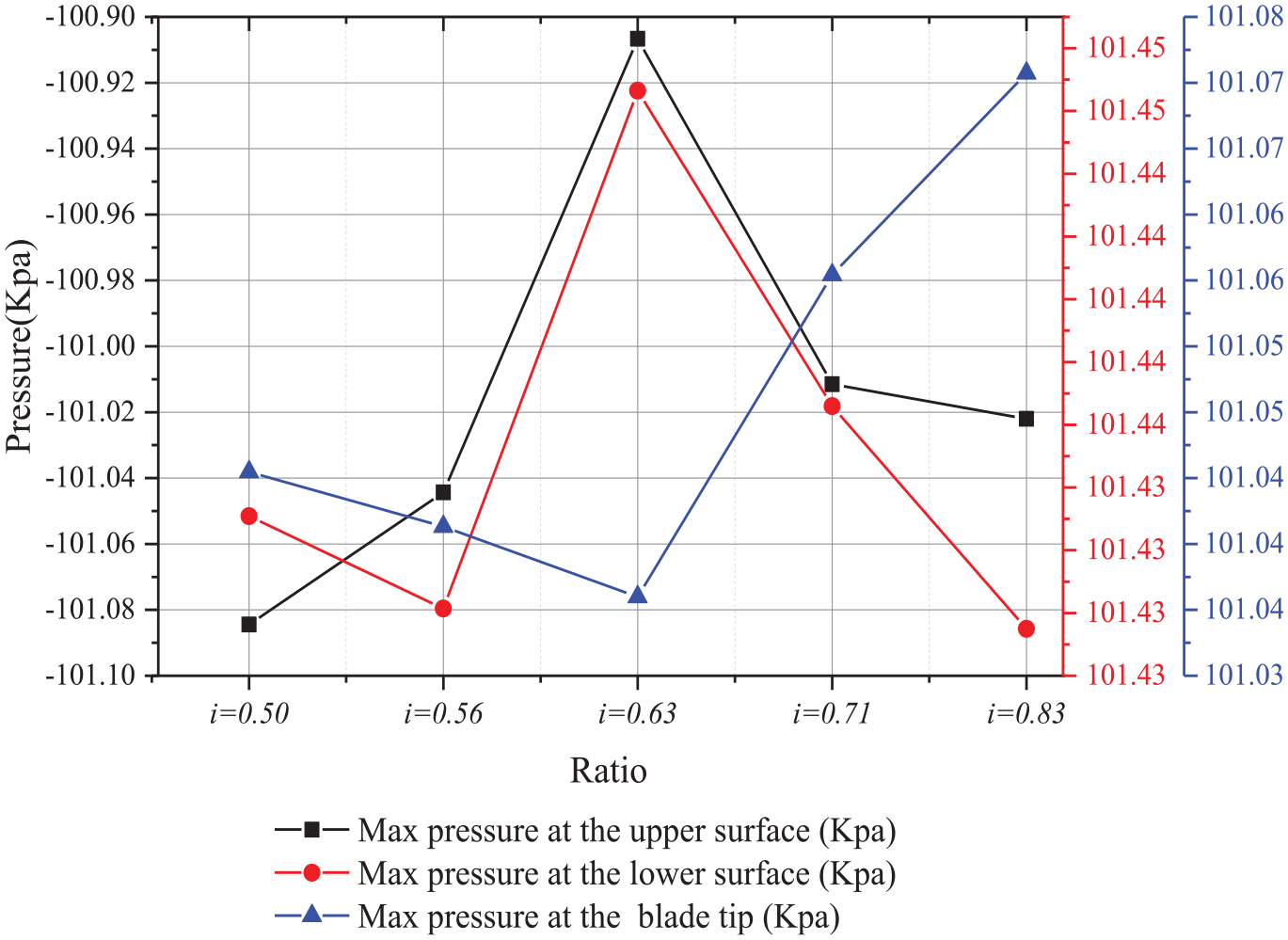
Pressure distribution of the blade (2200 r/min).
At i = 0.63, the pressure between the upper surface and the lower surface obtained the maximum, which will lead to a larger thrust, and this phenomena is also proved in Figure 5. Therefore, the rotor interference at i = 0.63 may be beneficial to improve the aerodynamic performance. Similarly, when the rotor interference is stronger at i = 0.71 and i = 0.83, the pressure between the upper and lower surface is much smaller, which will decrease the thrust with a poor performance. In addition, the increased pressure at the rotor tip may cause rotor vibration and then increase the extra power consumption.
Simulation analysis
Computational fluid dynamics setup
The mesh distribution is showed in the Figure 9.
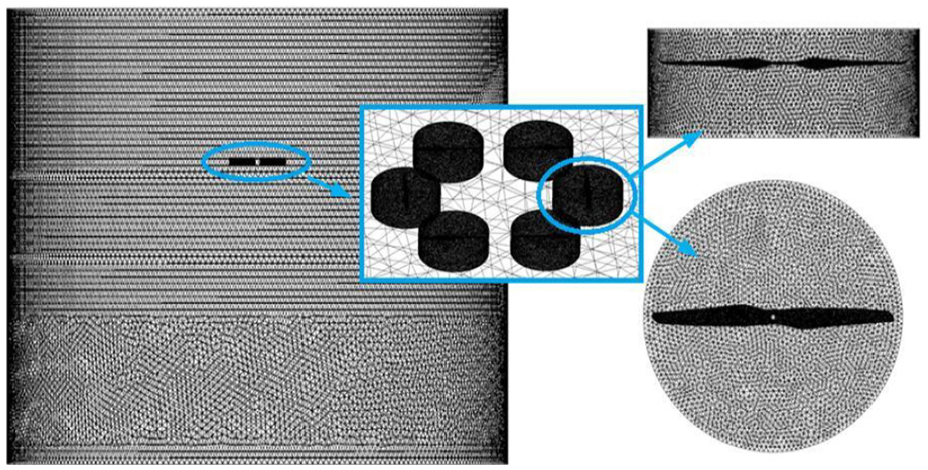
Mesh distribution.
The diameter of the fluid cylinder is 8 m with the depth of 6 m, and the mesh number is about 5864562. The Spalart–Allmaras turbulence model is applied in the simulations where the convergence requirement is 10–5.
Computational fluid dynamics results
Figure 10 shows the streamline distributions of flow field at i = 0.50, 0.56, 0.63, 0.71 and 0.86, respectively.

Streamline distribution of flow field in hover (2200 r/min): (a) i =0.50, (b) i =0.56, (c) i =0.63, (d) i =0.71 and (e) i =0.86.
As shown in the Figure 9, the strong coupling interference began to interact with the inflow of the vehicle at larger spacing ratio which may increase the instant thrust. For the smaller spacing, the vortex moved along the rotor which will cause strong coupling interference to increase the power. Figure 11 shows the outflow of adjacent rotors.
Outflow of adjacent rotors (2200 r/min): (a) i =0.50, (b) i =0.56, (c) i =0.63, (d) i =0.71 and (e) i =0.86.
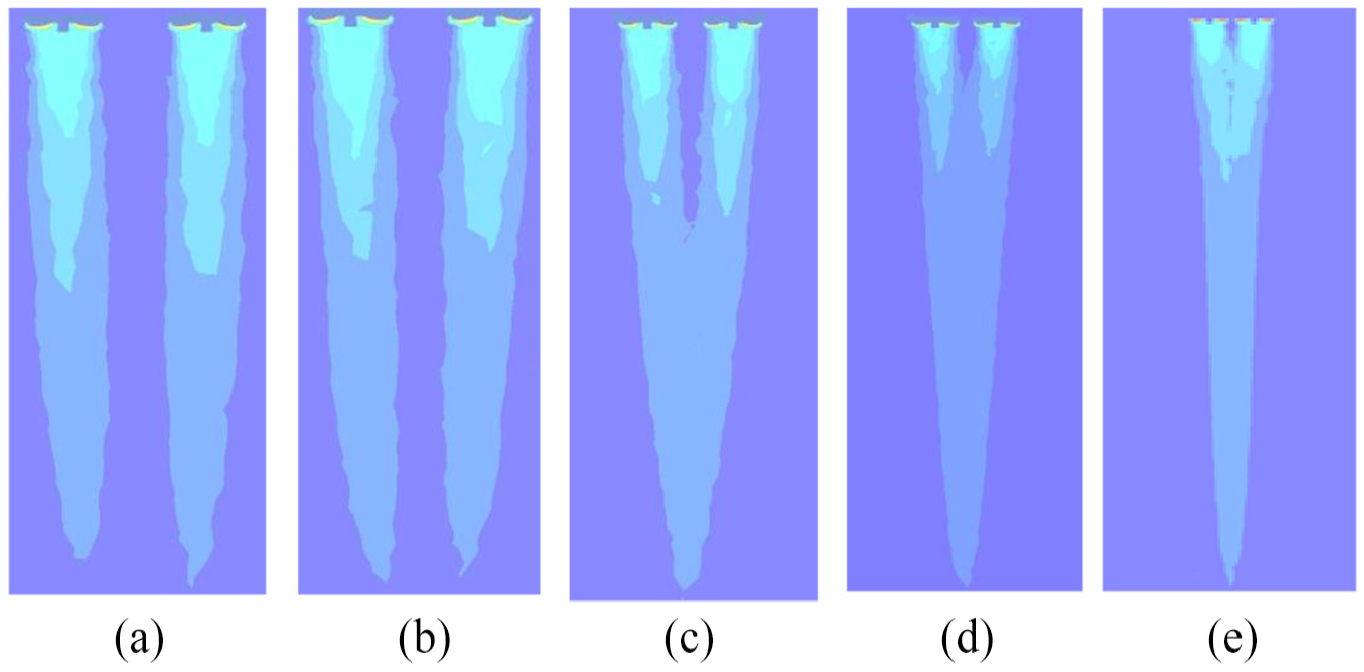
For the smaller spacing, the mutual interference of the outflow may cause the eddy flow in the flow field to introduce the extra power. Figure 12 shows the velocity contour of a Hex-rotor UAV in a vertical plane.
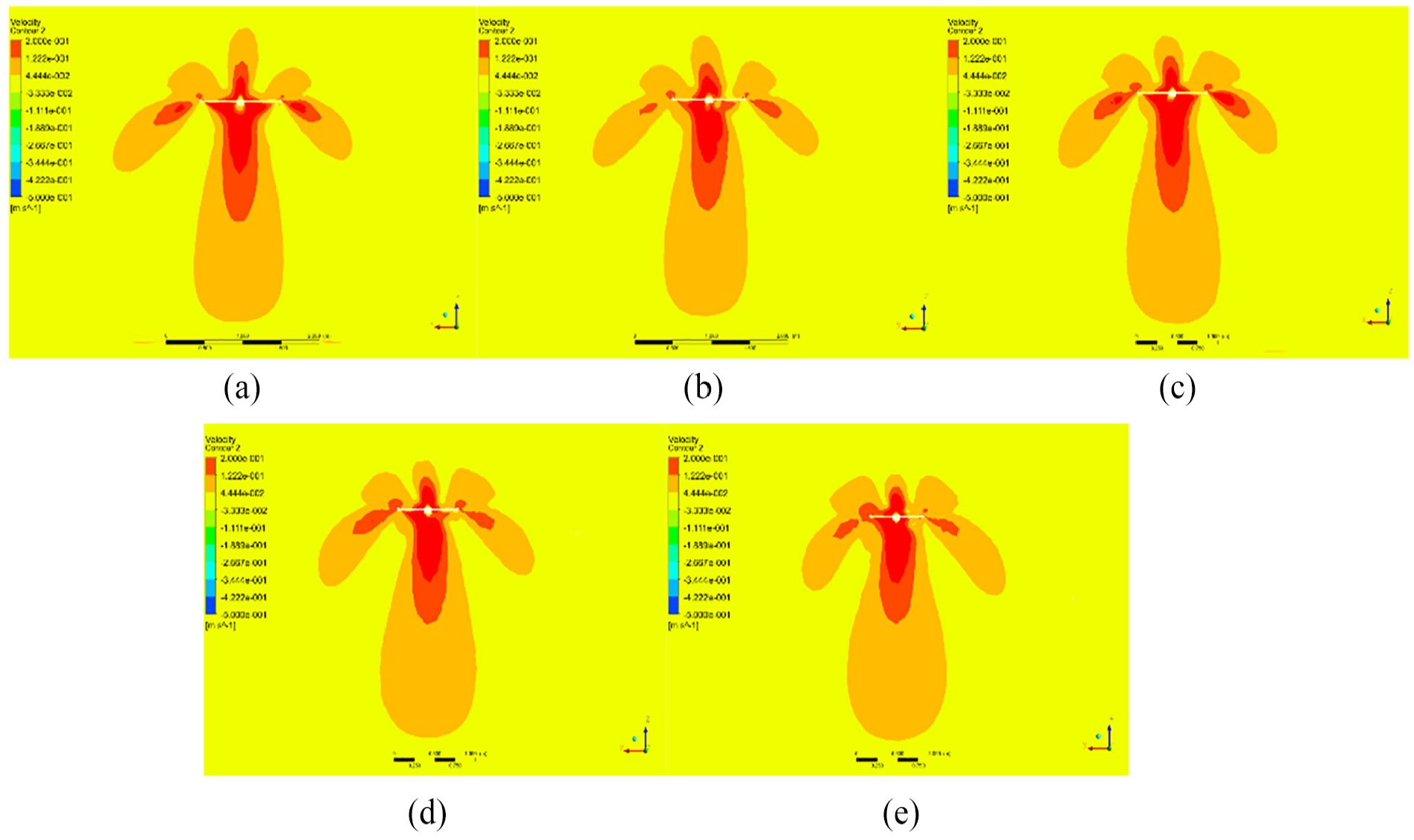
Velocity contour of Hex-rotor UAV in hovering (2200 r/min): (a) i = 0.50, (b) i = 0.56, (c) i = 0.63, (d) i = 0.71 and (e) i = 0.86.
It was noted that the distribution is even at i = 0.63 which is easier to maintain balance for the flight control. Figure 13 shows the vortex distribution of the Hex-rotor UAV.
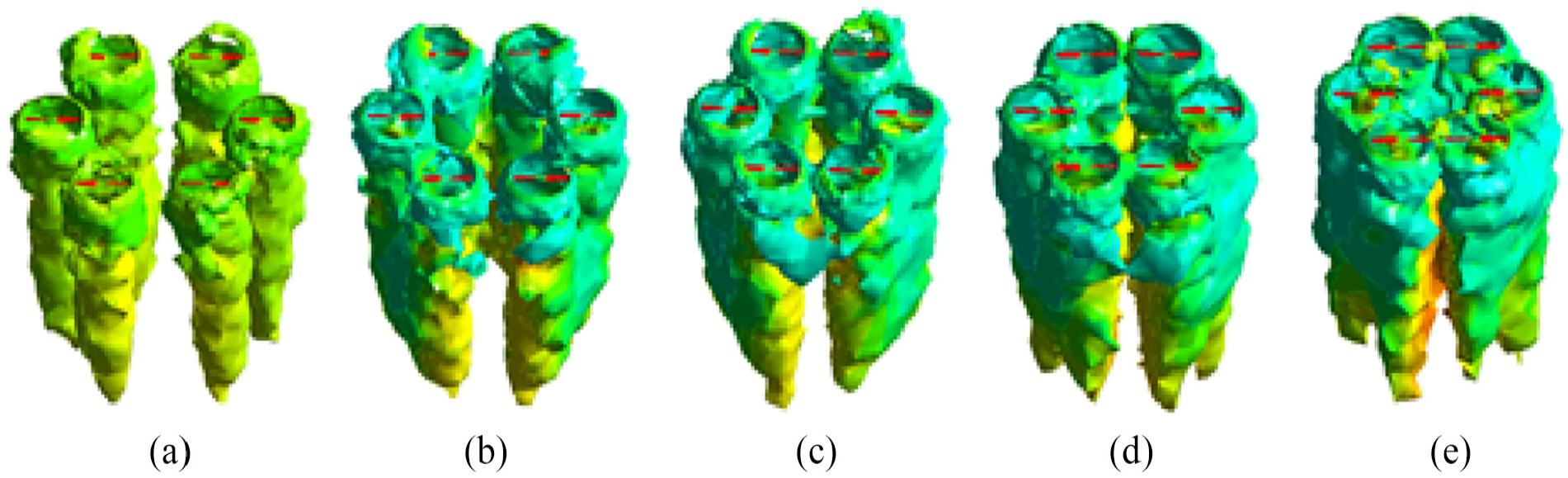
Vortex distribution of the Hex-rotor UAV: (a) i = 0.50, (b) i = 0.56, (c) i = 0.63, (d) i = 0.71 and (e) i = 0.86.
As showed in the figure, both the inflow and the outflow are interacted with each other for a smaller spacing where the aerodynamic environment is much more complicated as compared with the larger spacing. However, larger spacing means larger dimension with a heavy vehicle which means spacing ratio i = 0.63 may be the optimal rotor arrangement.
Conclusion
In this paper, the theoretical analysis of the PL and hover efficiency of the Hex-rotor UAV were presented together with the numerical simulation and experiments. According to the streamline distribution, pressure contour, velocity contour, and variation of thrust and power, conclusions are as follows:
The movement of the vortices and the mutual interference at the smaller rotor spacing may affect the hover efficiency by increasing extra power consumption. Also, the shape of the vortex and the distance between the vortex and the rotor tip may be the potential factors to affect the whole aerodynamic environment.
Spacing ratio at i = 0.63 was proved to obtain the better aerodynamic performance with a higher PL and FM. Combined with the streamline distributions, pressure contour and velocity contour, it is interesting to conclude that the hover efficiency is relatively higher when the vortex is uniform with less vibration, especially for the work mode at 2200 r/min.
The rotor interference at a proper spacing ratio may be beneficial to improve the aerodynamic performance by increasing the thrust without power increment. Further work will be involved with the drag effect of the whole fuselage of the UAV.
Footnotes
Acknowledgements
The authors thank the Key Laboratory of Fluid Power and Intelligent Electro-Hydraulic Control (Fuzhou University), Fujian Province University, and Fuzhou University Jinjiang Science and Education Park for applying the experimental field.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This project was supported by the National Natural Science Foundation of China (grant no. 51505087), Fuzhou University Jinjiang Science and Education Park (grand no. 2019-JJFDKY-59) and Fujian Provincial Industrial Robot Basic Components Technology Research and Development Center (grant no. 2014H21010011).